弹塑性分析
在这一册中,我们将详细地介绍由于塑性变性引起的非线性问题--弹塑性分析,我们的介绍人为以下几个方面:
?什么是塑性
?塑性理论简介
?ANSYS程序中所用的性选项
?怎样使用塑性
?塑性分析练习题
什么是塑性
塑性是一种在某种给定载荷下,材料产生永久变形的材料特性,对大多的工程材料来说,当其应力低于比例极限时,应力一应变关系是线性的。另外,大多数材料在其应力低于屈服点时,表现为弹性行为,也就是说,当移走载荷时,其应变也完全消失。
由于屈服点和比例极限相差很小,因此在ANSYS程序中,假定它们相同。在应力一应变的曲线中,低于屈服点的叫作弹性部分,超过屈服点的叫作塑性部分,也叫作应变强化部分。塑性分析中考虑了塑性区域的材料特性。
路径相关性:
即然塑性是不可恢复的,那么这种问题的就与加载历史有关,这类非线性问题叫作与路径相关的或非保守的非线性。
路径相关性是指对一种给定的边界条件,可能有多个正确的解—内部的应力,应变分布—存在,为了得到真正正确的结果,我们必须按照系统真正经历的加载过程加载。
率相关性:
塑性应变的大小可能是加载速度快慢的函数,如果塑性应变的大小与时间有关,这种塑性叫作率无关性塑性,相反,与应变率有关的性叫作率相关的塑性。
大多的材料都有某种程度上的率相关性,但在大多数静力分析所经历的应变率范围,两者的应力-应变曲线差别不大,所以在一般的分析中,我们变为是与率无关的。
工程应力,应变与真实的应力、应变:
塑性材料的数据一般以拉伸的应力—应变曲线形式给出。材料数据可能是工程应力(P A0)与工程应变(?l l0),也可能是真实应力(P/A)与真实应变(n L l l()
)。
0大应变的塑性分析一般采用真实的应力,应变数据而小应变分析一般采用工程的应力、应变数据。
什么时候激活塑性:
当材料中的应力超过屈服点时,塑性被激活(也就是说,有塑性应变发生)。而屈服应力本身可能是下列某个参数的函数。
?温度
?应变率
?以前的应变历史
?侧限压力
?其它参数
塑性理论介绍
在这一章中,我们将依次介绍塑性的三个主要方面:
?屈服准则
?流动准则
?强化准则
屈服准则:
对单向受拉试件,我们可以通过简单的比较轴向应力与材料的屈服应力来决定是否有塑性变形发生,然而,对于一般的应力状态,是否到达屈服点并不是明显的。
屈服准则是一个可以用来与单轴测试的屈服应力相比较的应力状态的标量表示。因此,知道了应力状态和屈服准则,程序就能确定是否有塑性应变产生。
屈服准则的值有时候也叫作等效应力,一个通用的屈服准则是Von Mises 屈服准则,当等效应力超过材料的屈服应力时,将会发生塑性变形。
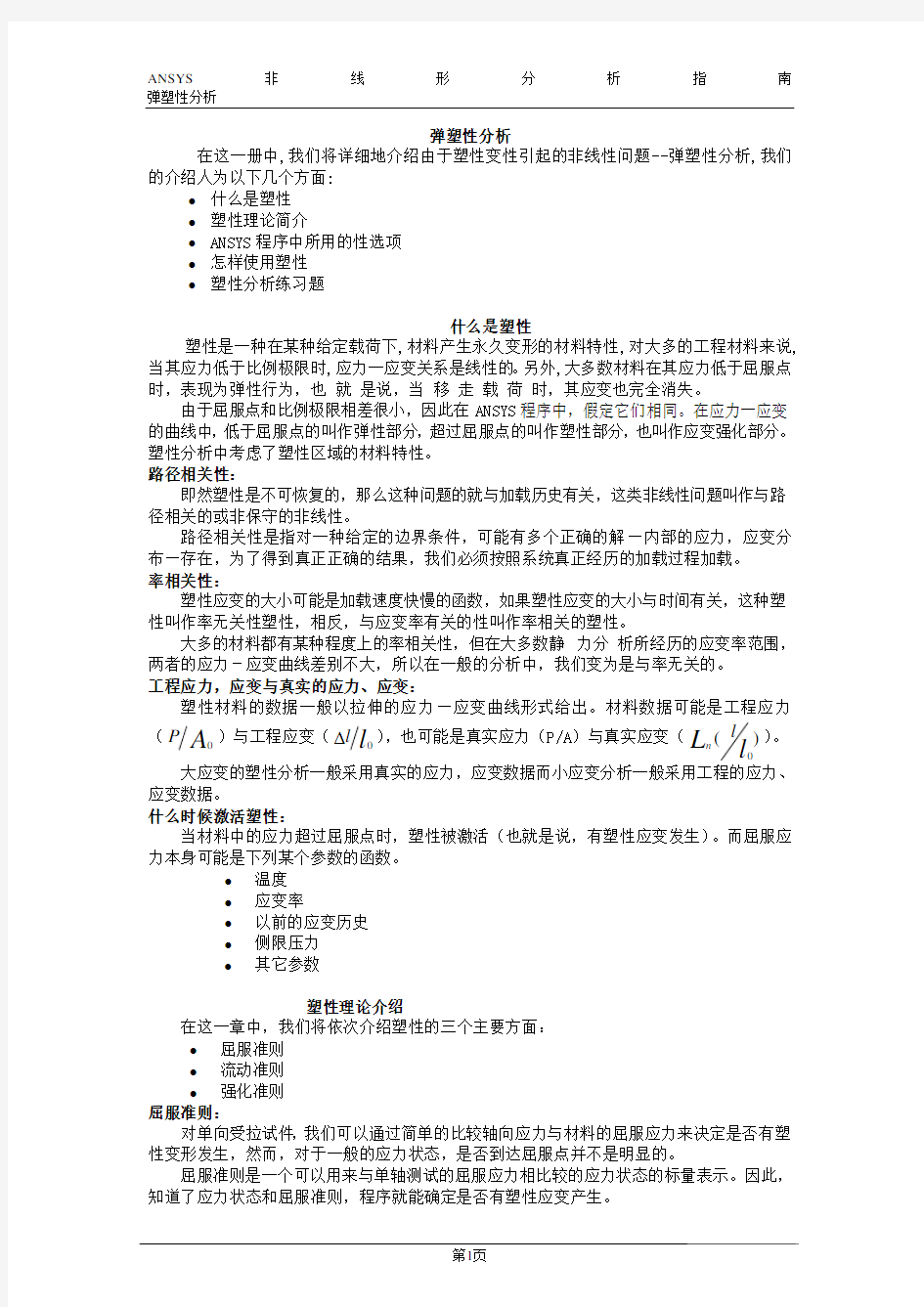
可以在主应力空间中画出Mises 屈服准则,见 图3-1。
在3-D 中,屈服面是一个以
123σσσ==为轴的圆柱面,在2-D 中,屈服面是一个椭圆,在屈服面内部的任何应力状态,都是弹性的,屈服面外部的任何应力状态都会引起屈服。注意:静水压应力状态(123
σσσ==)不会导致屈服:屈服与静水压应力无关,而只与偏差应力有关,因此,1180σ=,230σσ==的应力状态比123
180σσσ==的应力状态接近屈 服。Mises 屈服准则是一种除了土壤和脆性材料外典型使用的屈服准则,在土壤和脆性材料中,屈服应力是与静水压应力(侧限压力)有关的,侧限压力越高,发生屈服所需要的剪应力越大。
流动准则:
流动准则描述了发生屈服时,塑性应变的方向,也就是说,流动准则定义了单个塑性应变分量(x pl
ε,y pl
ε 等)随着屈服是怎样发展的。
一般来说,流动方程是塑性应变在垂直于屈服面的方向发展的屈服准则中推导出来的。这种流动准则叫作相关流动准则,如果不用其它的流动准 则(从其它不同的函数推导出来)。则叫作不相关的流动准则。
强化准则:
强化准则描述了初始屈服准则随着塑性应变的增加是怎样发展的。
一般来说,屈服面的变化是以前应变历史的函数,在ANSYS 程序中,使用了两种强化准则。
等向强化是指屈服面以材料中所作塑性功的大小为基础在尺寸上扩张。对M ises 屈服准则来说,屈服面在所有方向均匀扩张。见图3-2。
图3-2 等向强化时的屈服面变化图
由于等向强化,在受压方向的屈服应力等于受拉过程中所达到的最高应力。
随动强化假定屈服面的大小保持不变而仅在屈服的方向上移动,当某个方向的屈服应力升高时,其相反方向的屈服应力应该降低。见图3-3。
图3-3 随动强化时的屈服面变化图
在随动强化中,由于拉伸方向屈服应力的增加导致压缩方向屈服应力的降低,所以在对
σ的差值,初始各向同性的材料在屈服后将不再是向同应的两个屈服应力之间总存一个2
y
性的。
塑性选项
ANSYS程序提供了多种塑性材料选项,在此主要介绍四种典型的材料选项可以通过激活一个数据表来选择这些选项。
?经典双线性随动强化BKIN
?双线性等向强化BISO
?多线性随动强化MKIN
?多线性等向强化MISO
经典的双线性随动强化(BKIN)使用一个双线性来表示应力应变曲线,所以有两个斜率,弹
性斜率和塑性斜率,由于随动强化的Vonmises 屈服准则被使用,所以包含有鲍辛格效应,此选项适用于遵守Von Mises 屈服准则,初始为各向同性材料的小应变问题,这包括大多数的金属。
σ和切向斜率T E,可以定义高达六条不同温度下的曲需要输入的常数是屈服应力
y
线。
注意:
?使用MP命令来定义弹性模量
?弹性模量也可以是与温度相关的
?切向斜率Et不可以是负数,也不能大于弹性模量
在使用经典的双线性随动强化时,可以分下面三步来定义材料特性。
1、定义弹性模量
2、激活双线性随动强化选项
3、使用数据表来定义非线性特性
双线性等向强化(BIS0),也是使用双线性来表示应力-应变曲线,在此选项中,等向强化的Von Mises 屈服准则被使用,这个选项一般用于初始各向同性材料的大应变问题。需要输入的常数与BKIN选项相同。
多线性随动强化(MKIN)使用多线性来表示应力-应变曲线,模拟随动强化效应,这个选项使用Von Mises 屈服准则,对使用双线性选项(BKIN)不能足够表示应力-应变曲线的小应变分析是有用的。
需要的输入包括最多五个应力-应变数据点(用数据表输入),可以定义五条不同温度下的曲线。
在使用多线性随动强化时,可以使用与BKIN相同的步骤来定义材料特性,所不同的是在数据表中输入的常数不同,下面是一个用命令流定义多线性随动强化的标准输入。
MPTEMP,,10,70
MPDATA,EX,3,,30ES,25ES
TB,MK2N,3
TBTEMP,,STRA2N
TBDATA,,0.01,0.05,0.1
TBTEMP,10
TBDATA,,30000,37000,38000
TBTEMP,70
TBDATA,,225000,31000,33000
多线性等向强化(MISO)使用多线性来表示使用Von Mises屈服准则的等向强化的应力-应变曲线,它适用于比例加载的情况和大应变分析。
需要输入最多100个应力-应变曲线,最多可以定义20条不同温度下的曲线。
其材料特性的定义步骤如下:
1、定义弹性模量
2、定义MISO数据表
3、为输入的应力-应变数据指定温度值
4、输入应力-应变数据
5、画材料的应力-应变曲线
与MKIN 数据表不同的是,MISO的数据表对不同的温度可以有不同的应变值,因此,每条温度曲线有它自己的输入表。
怎样使用塑性
在这一章中,我们将介绍在程序中怎样使用塑性,重点介绍以下几个方面
?可用的ANSYS 输入
?ANSYS 输出量
?使用塑性的一些原则
? 加 强 收 敛 性 的 方 法
? 查 看 塑 性 分 析 的 结 果
ANSYS 输 入:
当使用T B 命令选择塑性选项和输入所需常数时,应该考虑到:
? 常数应该是塑性选项所期望的形式, 例如,我们总是需要应力和总的应变,而不是应力
与塑性应变。
? 如果还在进行大应变分析,应力-应变曲线数据应该是真实应力-真实应 变。 对双线性选项(BK I N ,BISO ),输入常数
y σ和T E 可以按下述方法来决定,如果材料没有明显的屈服应力y σ,通常以产生0.2%的塑性应变所对应的应力作为屈服应力,而T E 可以通过在分析中所预期的应变范围内来拟合实验曲线得到。
其它有用的载荷步选项:
? 使用的子步数(使用的时间步长),既然塑性是一种与路径相关的非线性,因此需要使用
许多载荷增量来加载
? 激活自动时间步长
? 如果在分析所经历的应变范围内,应力-应变曲线是光滑的,使用预测器选项,这能够
极大的降低塑性分析中的总体迭代数。
输出量
在塑性分析中,对每个节点都可以输出下列量:
EPPL -塑性应变分量x pl
ε, y pl
ε等等
EPEQ -累加的等效塑性应变
SEPL -根据输入的应力-应变曲线估算出的对于EPEQ 的等效应 力
HPRES -静水压应力
PSV -塑性状态变量
PLWK -单位体积内累加的塑性功
上面所列节点的塑性输出量实际上是离节点最近的那个积分点的值。
如果一个单元的所有积分点都是弹性的(EPEQ =0),那么节点的弹性应变和应力从积分点外插得到,如果任一积分点是塑性的(EPEQ>0),那么节点的弹性应变和应力实际上是积分点的值,这是程序的缺省情况,但可 以人为的改变它。
程序使用中的一些基本原则:
下面的这些原则应该有助于可执行一个精确的塑性分析
1、 所需要的塑性材料常数必须能够足以描述所经历的应力或应变范围内的材料特性。
2、 缓慢加载,应该保证在一个时间步内,最大的塑性应变增量小于5%,一 般 来说,如
果Fy 是系统刚开始屈服时的载荷,那么在塑性范围内的载荷增量应近似为:
? 0.05*Fy - 对用面力或集中力加载的情况
? Fy - 对用位移加载的情况
3、 当模拟类似梁或壳的几何体时,必须有足够的网格密度,为了能够足够的模拟弯曲反
应,在厚度方向必须至少有二个单元。
4、 除非那个区域的单元足够大,应该避免应力奇异,由于建模而导致的应力奇异有:
? 单点加载或单点约束
? 凹角
? 模型之间采用单点连接
? 单点耦合或接触条件
5、 如果模型的大部分区域都保持在弹性区内,那么可以采用下列方法来降低计算时间:
? 在弹性区内仅仅使用线性材料特性( 不 使 用TB 命 令)
? 在线性部分使用子结构
加强收敛性的方法:
如果不收敛是由于数值计算导致的,可以采用下述方法来加强问题的收敛性:
1、使用小的时间步长
2、如果自适应下降因子是关闭的,打开它,相反,如果它是打开的,且割线刚度正在被
连续地使用,那么关闭它。
3、使用线性搜索,特别是当大变形或大应变被激活时
4、预测器选项有助于加速缓慢收敛的问题,但也可能使其它的问题变得不稳定。
5、可以将缺省的牛顿-拉普森选项转换成修正的(MODI)或初始刚度(INIT)牛顿-拉普森选项,这两个选项比全牛顿-拉普森选项更稳定(需要更的迭代),但这两个选项仅在小挠度和小应变塑性分析中有效。
查看结果
1、感兴趣的输出项(例如应力,变形,支反力等等)对加载历史的响应应该是光滑的,
一个不光滑的曲线可能表明使用了太大的时间步长或太粗的网格。
2、每个时间步长内的塑性应变增量应该小于5%,这个值在输出文件中以“Max plastic
Strain Step”输出,也可以使用POST26来显示这个值(Main Menu:Time Hist Postpro Define Variables)。
3、塑性应变等值线应该是光滑的,通过任一单元的梯度不应该太大。
4、画出某点的应力—应变图,应力是指输出量SEQV(Mises 等效应力),总应变由累
加的塑性应变EPEQ和弹性应变得来。
塑性分析实例(GUI方法)
在这个实例分析中,我们将进行一个圆盘在周期载荷作用下的塑性分析。
问题描述:
一个周边简支的圆盘,在其中心受到一个冲杆的周期作用。由于冲杆被假定是刚性的,因此在建模时不考虑冲杆,而将圆盘上和冲杆接触的结点的Y方向上的位移耦合起来。
由于模型和载荷都是轴对称的,因此用轴对称模型来进行计算。求解通过四个载荷步实现。
问题详细说明:
材料性质:
EX=70000 (杨氏模量)
NUXY=0.325(泊松比)
塑性时的应力—应变关系如下:
应变应力
0.0007857 55
0.00575 112
0.02925 172
0.1 241
加载历史:
时间载荷
0 0
1 -6000
2 750
3 -6000
问题描述图:
步骤一:建立计算所需要的模型。
在这一步中,建立计算分析所需要的模型,包括定义单元类型,划分网格,给定边界条件。并将数据库文件保存为“exercise2.db”。在此,对这一步的过程不作详细叙述。
步骤二:恢复数据库文件“exercise.db”
Utility Menu>File>Resume from
步骤三:定义材料性质
1、选择菜单路径Main Menu>Preprocessor>Matersal Props>-Constant-Isotropic.
Isotropic Matersal Properties (各向同性材料性质)对话框出现。
2、单击OK来指定材料号为1。另一个I sotropic Material Properties对话框出现。
3、对杨氏模量(EX)键入EXX 。
4、对泊松比(NUXY)键入0.325。
5、单击OK。
步骤四:定义和填充多线性随动强化数据表(MKIN)
1、选择菜单路径Main Menu>Preprocessor>Material Props>DataTables>Define/Activate.
Define/Activate Data Table(激活数据表)对话框出现。
2、在关于type of data table(数据表类型)的卷动框中,卷动到“Multi kinem MKIN”
且选中它。
3、在material refersuce number(材料参考号)中,健入1。
4、对number of temperatures(温度数)键入1,单击OK。
5、选择菜单路径Main Menu>Preprocessor>Material Props>Data Tables>Edit
Active.。. Data Table MKIN对话框出现。
6、在“Strain”一行中,从第二列起分别输入STN1,STN2,STN3,STN4。
7、在“Curve 1”一行中,从第二列起分别输入STS1,STS2,STS3,STS4。
8、选择File>Apply & Quit。
9、选择菜单路径Main Menu>Preprosessor>Material Porps>Data Tables>Graph.
Graph Data Tables(图形表示数据表)对话框出现。
10、单击OK接受绘制MKIN表的缺省。一个MKIN表的标绘图出现在ANSYS 图形窗口中。
步骤五:进入求解器
选择菜单路径Main Menu>Solution。
步骤六:定义分析类型和选项
1、选择菜单路径Main Menu>Solution>-Analysis Type-New Analysis.
2、单击“Static”来选中它然后单击OK。
步骤七:打开预测器,设置输出控制。
1、选择菜单路径Main menu>solution-Load Set Opts-Nonlinear>Predictor。
2、将predictor的状态设置为“ON”。
3、选择菜单路径Main Menu>Solution>-Load Step Options- Output Ctrls> DB/Results
File. Coutrols for Database and Results File Writing (对数据库和结果文件写入
的控制)对话框出现。
4、单击“Every substep”且选中它。
步骤八:设置载荷步选项
1、选择菜单路径Main Menu>Solution>-Load Step Options-Time/Frequenc >
time&Substep。 Time&Substep Option(时间和子步数选项)对话框出现。
2、对time at end of Load Step(载荷步终止时间)键入 1e-6
3、对Number of substeps (子步数)键入1。
步骤九:对第一个载荷步加载
在结点3的Y方向施加一大小为 0的集中力载荷。
步骤十:将第一个载荷步写入载荷步文件。
1、选择菜单路径Main Menu>Solution>-Write Ls File,出现对话框。
2、在“LSNUM”的输入框中键入 1
步骤十一:对第二个载荷步加载,并写入载荷步文件。
1、选择菜单路径Main Menu>Solution>-Load Step
Options-Time/Frequenc>time&Substep。 Time&Substep Option(时间和时间步选项)
对话框出现。
2、对time at end of Load Step(载荷步终止时间)键入1
3、对Number of substeps (子步数)键入10。
4、单击automatic time stepping option(自动时间步长选项)使之为ON,然后单击OK。
5、在结点3的Y方向施加一大小为 -6000的集中力载荷。
6、选择菜单路径Main Menu>Solution>-Write Ls File,出现对话框。
7、在“LSNUM”的输入框中键入 2
步骤十二:对第三个载荷步加载,并写入载荷步文件。
1、选择菜单路径Main Menu>Solution>-Load Step
Options-Time/Frequenc>time&Substep。 Time&Substep Option(时间和时间步选项)
对话框出现。
2、对time at end of Load Step(载荷步终止时间)键入2
3、在结点3的Y方向施加一大小为 750的集中力载荷。
4、选择菜单路径Main Menu>Solution>-Write Ls File,出现对话框。
5、在“LSNUM”的输入框中键入3
步骤十三:对第四个载荷步加载,并写入载荷步文件。
1、选择菜单路径Main Menu>Solution>-Load Step Options-
Time/Frequenc>time&Substep。 Time&Substep Option(时间和
时间步选项)对话框出现。
2、对time at end of Load Step(载荷步终止时间)键入3
3、在结点3的Y方向施加一大小为 -6000的集中力载荷。
4、选择菜单路径Main Menu>Solution>-Write Ls File,出现对话框。
5、在“LSNUM”的输入框中键入4
步骤十三:求解问题
1、选择菜单路径Main Menu>Solution>-Solve-From Ls Files,对话框出现。
2、对“LSMIN”键入1,对“LSMAX”键入4。
3、单击对话框中的OK开始求解。
步骤十四:进行后处理。
在这一步中,可以进行所想要的后处理,在此不进行详述。
非线性静态实例分析(命令流方式)
你可以用下面显示的ANSYS命令替代GUI选择,进行上面这个例题的塑性分析。fini
/cle
/title,circular plate loaded by a circular punch - kinematic hardening
rpl=65
rpu=5
h=6.5
exx=70000
sts1=55 !yield stress
stn1=sts1/exx
sts2=112
stn2=0.00575
sts3=172
stn3=0.02925
sts4=241
stn4=0.1
nex=15 ! No. of elements along the radius
net=2 ! No. of elements in the plate's thickness
/prep7
et,1,42,,,1
! define node for convenient postprocessing
n,1,rpl,0
n,2,0,0
n,3,0,h/2
!define geometry
k,1,,-(h/2)
k,2,rpu,-(h/2)
k,3,rpl,-(h/2)
kgen,2,1,3,1,,h,,3
nex1=nint(0.8*net)
nex2=nex-nex1
l,1,2
l,4,5
l,2,3
l,5,6
a,1,2,5,4
a,2,3,6,5
lesize,1,,,nex1
lesize,2,,,nex1
lesize,3,,,nex2,2.5
lesize,4,,,nex2,2.5
esize,(h/net)
amesh,all
nummrg,node
nodes
nsel,s,loc,x,0,rpu
nsel,r,loc,y,(h/2)
cp,1,uy,all
nsel,all
esel,all
fini
/solu
nsel,s,loc,x,rpl
nsel,r,loc,y,0
d,all,uy
nsel,s,loc,x,0
d,all,ux
nsel,all
outres,all,all
fini
/prep7
mp,ex,1,exx
mp,nuxy,1,0.325
tb,mkin,1
tbtemp,,strain tbdata,,stn1,stn2,stn3,stn4 tbtemp,,
tbdata,,sts1,sts2,sts3,sts4 fini
/solu
pred,on
outres,all,all
nsubst,1
time,1e-6
f,3,fy,0
lswrite
autots,on
nsubst,10
time,1
f,3,fy,-6000
lswrite
time,2
f,3,fy,750
lswrite
time,3
f,3,fy,-6000
lswrite
lssolve,1,4
fini
/post1
set,2
/dscal,1,1
pldisp,2
fini
/post26
nsol,2,2,u,y,uy2 rforce,3,1,f,y,ry1 add,2,2,,,uy2,,,-1
/grid,1
/axlab,x,deflection [mm] /axlab,y,force [n] xval,2
plvar,3
prvar,2,3
fini
ANSYS 非线性分析指南(1) 基本过程 第一章结构静力分析 1. 1 结构分析概述 结构分析的定义: 结构分析是有限元分析方法最常用的一个应用领域。结构这个术语是一个广义的概念,它包括土木工程结构,如桥梁和建筑物;汽车结构,如车身、骨架;海洋结构,如船舶结构;航空结构,如飞机机身、机翼等,同时还包括机械零部件,如活塞传动轴等等。 在ANSYS 产品家族中有七种结构分析的类型,结构分析中计算得出的基 本未知量- 节点自由度,是位移;其他的一些未知量,如应变、应力和反力, 可通过节点位移导出。 七种结构分析的类型分别是: a. 静力分析- 用于求解静力载荷作用下结构的位移和应力等。静力分析 包括线性和非线性分析。而非线性分析涉及塑性、应力刚化、大变形、大应变、超弹性、接触面和蠕变,等。 b. 模态分析- 用于计算结构的固有频率和模态。 c. 谐波分析- 用于确定结构在随时间正弦变化的载荷作用下的响应。 d. 瞬态动力分析- 用于计算结构在随时间任意变化的载荷作用下的响应,并且可计及上述提到的静力分析中所有的非线性性质。 e. 谱分析- 是模态分析的应用拓广,用于计算由于响应谱或PSD 输入 随机振动引起的应力和应变。 f. 屈曲分析- 用于计算屈曲载荷和确定屈曲模态,ANSYS 可进行线性特征值和非线性屈曲分析。 g. 显式动力分析- ANSYS/LS-DYNA可用于计算高度非线性动力学和复 杂的接触问题。 除了前面提到的七种分析类型,还有如下特殊的分析应用: ? 断裂力学 ? 复合材料 ? 疲劳分析
? p-Method 结构分析所用的单元:绝大多数的ANSYS 单元类型可用于结构分析。单元类型从简单的杆单元和梁单元一直到较为复杂的层合壳单元和大应变实体单元 1.2 结构线性静力分析 静力分析的定义: 静力分析计算在固定不变的载荷作用下结构的响应。它不考虑惯性和阻尼的影响,如结构受随时间变化载荷的情况。可是静力分析可以计算那些固定不变的惯性载荷对结构的影响,如重力和离心力;以及那些可以近似为等价静力作用的随时间变化载荷,如通常在许多建筑规范中所定义的等价静力风载和地震载荷。 静力分析中的载荷: 静力分析用于计算由那些不包括惯性和阻尼效应的载荷作用于结构或部件上引起的位移、应力、应变和力。固定不变的载荷和响应是一种假定,即假定载荷和结构的响应随时间的变化非常缓慢,静力分析所施加的载荷包括: ? - 外部施加的作用力和压力 ? - 稳态的惯性力如中力和离心力 ? - 位移载荷 ? - 温度载荷 线性静力分析和非线性静力分析 静力分析既可以是线性的也可以是非线性的。非线性静力分析包括所有的非线性类型:大变形、塑性、蠕变、应力刚化、接触、间隙单元、超弹性单元等,本节主要讨论线性静力分析,非线性静力分析在下一节中介绍。 线性静力分析的求解步骤 1 建模 2 施加载荷和边界条件求解 3 结果评价和分析
Ansys的热载荷及热单元类型 Ansys的6种热载荷 ANSYS共提供了6种载荷,可以施加在实体模型或单元模型上,包括:温度、热流率、对流、热流密度、生热率和热辐射率。 1. 温度 作为第一类边界条件,温度可以施加在有限元模型的节点上,也可以施加在实体模型的关键点、线段及面上。 2. 热流率 热流率(Heal Flow)—种节点集中载荷,只能施加在节点或关键点上,主要用于线单元模型。提示:如果温度与热流率同时施加在某一节点上,則ANSYS读取温度值进行计算。 3.对流 对流(Convection)是一种面载荷,用于计算流体与实体的热交换。它可以施加在有限元模型的节点及单元上,也可以施加在实体模型的线段和面上。 4.热流密度 热流密度,又称热通量(Heat Flux),单位为W/m2。热流密度是一种面载荷,表示通过单位面积的热流率。当通过单位面积的热流率己知时,可在模型相应的外表面施加热流密度。若输入值为正,则表示热流流入单元:反之,则表示热流流出单元。它可以施加在有限元模型的节点及单元上,也可以施加在实体模型的线段和面上。 提示:热流密度与对流可以施加在同一外表面,但ANSYS将读取最后施加的面载荷进行计算。 5. 生热率 如前所述,生热率既可看成是材料的一种基本属性,又可作为载荷施加在单元上,它可以施加在有限元模型的节点及单元上,也可以施加在实体模型的关键点、线段、面及体上。 6. 热辐射率 热辐射率也是一种面载荷,通常施加于实体的外表面。它可以施加在有限元模型的节点及单元上,也可以施加在实体模型的线段和面上。
Ansys的热单元类型 ANSYS 10.0热分析共提供了 40余种单元,其中包括辐射单元、对流单元、特殊单元以及前面所介绍的耦合场中-元等。其中常见的用于热分析的单元有16种: 下面一次对各单元进行介绍●MASS71 维度:1D、2D、3D 节点数:1 自由度:温度 性质:质量单元 几何形状 ●LINK31 维度:2D、3D 节点数:2 自由度:温度 性质:热辐射单元 几何形状
龙源期刊网 https://www.doczj.com/doc/55847625.html, 开源科学计算软件Scilab及其教学应用 作者:王凤蕊王文宏 来源:《中小学信息技术教育》2006年第11期 新的《高中数学课程标准》已将“数学建模”课设置为高中数学的一个专题课程。同时,高中物理、化学等课程的教与学活动也经常需要对各种问题进行数学建模和计算。因此,科学计算软件的使用能力应成为广大教师和学生的基本技能之一。 开源科学计算软件Scilab不仅能解决各种各样的计算问题,而且能将计算过程和结果可视化,同时还能模拟一些事物的变化过程。比如,在解析几何的学习中,可以借助Scilab动态可视化生成三维空间,加深学生的理解。 与商业科学计算软件Matlab相比,在功能上Scilab基本可以替代Matlab,且Scilab最诱人之处在于,它是一款开放源码的软件,使用正版软件完全免费。本文首先对Scilab的功能、特点、下载、安装与编程方法进行了简要介绍,最后结合两个实例探讨了其在中学教学中的应用。 一、Scilab简介 Scilab是法国国家信息与自动化研究院(INRIA) 开发的“开放源码”科学计算自由软件,它主要有数值计算、仿真与模拟、计算结果可视化等功能。Scilab数据类型丰富,可以方便实现各种矩阵运算,并允许用户在线建立各种自定义函数。此外,Scilab还具有图形显示功能,可实现各种常规形式的计算结果可视化。 Scilab是一种解释性语言,能运行于Windows、Linux以及Unix等操作系统环境下。作为开放源码的软件,Scilab的源代码、用户手册及二进制的可执行文件都是免费的。用户不仅可以在Scilab的许可证条件下自由使用该软件,还可以根据需要修改源代码,使之更加符合自身需要。此外,Scilab还包括一些应用于不同科学计算领域的工具箱,如科学计算、数学建模、信号处理、网络分析、决策优化、线性与非线性控制等。 二、Scilab的安装及运行
ANSYS软件中常用的单元类型 一、单元 (1)link(杆)系列: link1(2D)和link8(3D)用来模拟珩架,注意一根杆划一个单元。 link10用来模拟拉索,注意要加初应变,一根索可多分单元。 link180是link10的加强版,一般用来模拟拉索。 (2)beam(梁)系列: beam3(2D)和beam4(3D)是经典欧拉梁单元,用来模拟框架中的梁柱,画弯据图用etab 读入smisc数据然后用plls命令。注意:虽然一根梁只划一个单元在单元两端也能得到正确的弯矩图,但是要得到和结构力学书上的弯据图差不多的结果还需多分几段。该单元需要手工在实常数中输入Iyy和Izz,注意方向。 beam44适合模拟薄壁的钢结构构件或者变截面的构件,可用"/eshape,1"显示单元形状。 beam188和beam189号称超级梁单元,基于铁木辛科梁理论,有诸多优点:考虑剪切变形的影响,截面可设置多种材料,可用"/eshape,1"显示形状,截面惯性矩不用自己计算而只需输入截面特征,可以考虑扭转效应,可以变截面(8.0以后),可以方便地把两个单元连接处变成铰接(8.0以后,用ENDRELEASE命令)。缺点是:8.0版本之前beam188用的是一次形函数,其精度远低于beam4等单元,一根梁必须多分几个单元。8.0之后可设置“KEYOPT(3)=2”变成二次形函数,解决了这个问题。可见188单元已经很完善,建议使用。beam189与beam188的区别是有3个结点,8.0版之前比beam188精度高,但因此建模较麻烦,8.0版之后已无优势。 (3)shell(板壳)系列 shell41一般用来模拟膜。 shell63可针对一般的板壳,注意仅限弹性分析。它的塑性版本是shell43。加强版是shell181(注意18*系列单元都是ansys后开发的单元,考虑了以前单元的优点和缺陷,因而更完善),优点是:能实现shell41、shell63、shell43...的所有功能并比它们做的更好,偏置中点很方便(比如模拟梁板结构时常要把板中面望上偏置),可以分层,等等。 (4)solid(体)系列 土木中常用的就solid45、solid46、solid65、solid95等。 solid45就不用多说了,solid95是它的带中结点版本。
!ANSYS命令流学习笔记10-利用APDL在WorkBench中进行非线性屈曲分析 !学习重点: !1、强化非线性屈曲知识 首先了解屈曲问题。在理想化情况下,当F < Fcr时, 结构处于稳定平衡状态,若引入一个小的侧向扰动力,然后卸载, 结构将返回到它的初始位置。当F > Fcr时, 结构处于不稳定平衡状态, 任何扰动力将引起坍塌。当F = Fcr时,结构处于中性平衡状态,把这个力定义为临界载荷。在实际结构中, 几何缺陷的存在或力的扰动将决定载荷路径的方向。在实际结构中, 很难达到临界载荷,因为扰动和非线性行为, 低于临界载荷时结构通常变得不稳定。 要理解非线性屈曲分析,首先要了解特征值屈曲。特征值屈曲分析预测一个理想线弹性结构的理论屈曲强度,缺陷和非线性行为阻止大多数实际结构达到理想的弹性屈曲强度,特征值屈曲一般产生非保守解, 使用时应谨慎。 !理论解,根据Euler公式。其中μ取决于固定方式。 !有限元方法, 已知在特征值屈曲问题: 求解,即可得到临界载荷 而非线性屈曲问题: 其中为结构初始刚度,为有缺陷的结构刚度,为位移矩阵,为载荷矩阵。 非线性屈曲分析时考虑结构平衡受扰动(初始缺陷、载荷扰动)的非线性静力分析,该分析时一直加载到结构极限承载状态的全过程分析,分析中可以综合考虑材料塑性、几何非线性、接触、大变形。非线性屈曲比特征值屈曲更精确,因此推荐用于设计或结构的评价。 !2、熟悉WB中非线性屈曲分析流程 (1) 前处理,施加单元载荷,进行预应力静力分析。 (2) 基于预应力静力分析,指定分析类型为特征值屈曲分析,完成特征值屈曲分析。 (3) 在APDL模块将一阶特征屈曲模态位移乘以适当系数,将此变形后的形状当做非线性分析的初始模型。
ANSYS 中的超单元 摘自htbbzzg的博客,网易从 8.0 版开始,ANSYS 中增加了超单元功能,本文通过一些实际例子,探讨了 ANSYS 中超单元的具体使用。 1. 使用超单元进行静力分析 根据 ANSYS 帮助文件,使用超单元的过程可以划分为三个阶段 (称为 Pass): (1) 生成超单元模型 (Generation Pass) (2) 使用超单元数据 (Use Pass) (3) 扩展模型 (Expansion Pass) 下面以一个例子加以说明: 一块板,尺寸为 20×40×2,材料为钢,一端固支,另一端承受法向载荷。 首先生成原始模型 se_all.db,即按照整个结构进行分析,以便后面与超单元结果进行比较: 首先生成两个矩形,尺寸各为 20×2。 然后定义单元类型 shell63; 定义实常数 1 为: 2 (板厚度)。 材料性能: 弹性模量 E=201000; 波松比μ=0.3; 密度ρ=7.8e-9; 单位为 mm-s-N-MPa。 采用边长 1 划分单元; 一端设置位移约束 all,另一端所有 (21 个) 节点各承受 Z 向力 5。 计算模型如下图:
静力分析的计算结果如下:
为了后面比较的方便,分别给出两个 area 上的结果:
超单元部分,按照上述步骤操作如下: (1) 生成超单元 选择后半段作为超单元,前半段作为非超单元(主单元)。 按照 ANSYS 使用超单元的要求,超单元与非超单元部分的界面节点必须一致 (重合),且最好分别的节点编号也相同,否则需要分别对各节点对建立耦合方程,操作比较麻烦。 实际上,利用 ANSYS 中提供的 mesh200 单元,对超单元和非超单元的界面实体,按照同一顺序,先于所有其它实体划分单元,很容易满足界面节点编号相同的要求。对于多级超单元的情况,则还要结合其它操作 (如偏移节点号等) 以满足这一要求。 对于本例,采用另一办法,即先建立整个模型,然后再划分超单元和非超单元。即:将上述模型分别存为 se_1.db (超单元部分) 和 se_main.db (非超单元部分) 两个文件,然后分别处理。 对于 se_1.db 模型,按照超单元方式进行处理。由于模型及边界条件已建立,只需删除前半段上的划分,结果就是超单元所需的模型。 然后直接进入创建超单元矩阵的操作,首先说明一下创建超单元矩阵的一般步骤: A 进入求解模块: 命令:/Solu GUI:Main menu -> Solution B 设置分析类型为“子结构或部件模态综合“ 命令:ANTYPE GUI :Main menu -> Solution -> Analysis Type -> New Analysis 选择 Substructuring/CMS (子结构或部件模态综合) C 设置子结构选项 命令:SEOPT
ANSYS中单元类型介绍和单元的选择原则ANSYS中单元类型的选择 初学ANSYS的人,通常会被ANSYS所提供的众多纷繁复杂的单元类型弄花了眼,如何选择正确的单元类型,也是新手学习时很头疼的问题。 类型的选择,跟你要解决的问题本身密切相关。在选择单元类型前,首先你要对问题本身有非常明确的认识,然后,对于每一种单元类型,每个节点有多少个自由度,它包含哪些特性,能够在哪些条件下使用,在ANSYS的帮助文档中都有非常详细的描述,要结合自己的问题,对照帮助文档里面的单元描述来选择恰当的单元类型。 1.该选杆单元(Link)还是梁单元(Beam)? 这个比较容易理解。杆单元只能承受沿着杆件方向的拉力或者压力,杆单元不能承受弯矩,这是杆单元的基本特点。 梁单元则既可以承受拉,压,还可以承受弯矩。如果你的结构中要承受弯矩,肯定不能选杆单元。 对于梁单元,常用的有beam3,beam4,beam188这三种,他们的区别在于: 1)、beam3是2D的梁单元,只能解决2维的问题。 2)、beam4是3D的梁单元,可以解决3维的空间梁问题。 3)、beam188是3D梁单元,可以根据需要自定义梁的截面形状。(常规是6个自由度,比如是用于桁架等框架结构,如鸟巢,飞机场的架构) 2.对于薄壁结构,是选实体单元还是壳单元? 对于薄壁结构,最好是选用shell单元,shell单元可以减少计算量,如果你非要用实体单元,也是可以的,但是这样计算量就大大增加了。而且,如果选实体单元,薄壁结构承受弯矩的时候,如果在厚度方向的单元层数太少,有时候计算结果误差比较大,反而不如shell单元计算准确。 实际工程中常用的shell单元有shell63,shell93。shell63是四节点的shell单元(可以退化为三角形),shell93是带中间节点的四边形shell单元(可以退化为三角形),shell93单元由于带有中间节点,计算精度比shell63更高,但是由于节点数目比shell63多,计算量会增大。对于一般的问题,选用shell63就足够了。
一、单元分类 MP - ANSYS/Multiphysics DY - ANSYS/LS-Dyna3D FL - ANSYS/Flotran ME - ANSYS/Mechanical PR - ANSYS/Professional PP - ANSYS/PrepPost ST - ANSYS/Structural EM - ANSYS/Emag 3D ED - ANSYS/ED
LINK1 —二维杆单元 单元描述: LINK1单元有着广泛的工程应用,比如:桁架、连杆、弹簧等等。这种二维杆单元是杆轴方向的拉压单元,每个节点有2个自由度:沿节点坐标系x、y方向的平动。就象在铰接结构中的表现一样,本单元不承受弯矩。单元的详细特性请参考理论手册。三维杆单元的描述参见LINK8。 下图是本单元的示意图。 PLANE2 —二维6节点三角形结构实体单元 单元描述: PLANE2是与8节点PLANE82单元对应的6节点三角形单元。单元的位移特性是二次曲线,适合于模拟不规则的网格(比如由不同的CAD/CAM系统得到的网格)。 本单元由六个节点定义,每个节点有2个自由度:沿节点坐标系x、y 方向的平动。本单元可作为平面单元(平面应力或平面应变)或者作为轴对称单元使用。本单元还具有塑性、蠕变、膨胀、应力刚化、大变形、大应变等功能。详细特性请参考理论手册。 下图是本单元的示意图。
BEAM3二维弹性梁单元 BEAM3是一个轴向拉压和弯曲单元,每个节点有3个自由度:沿节点坐标系x、y方向的平动和绕z轴的转动。单元的详细特性请参考理论手册。其它的二维梁单元是塑性梁单元(BEAM23)和变截面非对称梁单元(BEAM54)。 下图是本单元的示意图。 BEAM4三维弹性梁单元 单元描述: BEAM4是一个轴向拉压、扭转和弯曲单元,每个节点有6个自由度:沿节点坐标系的x、y、z方向的平动和绕x、y、z轴的转动。本单元具有应力刚化和大变形功能。在大变形(有限转动)分析中允许使用一致切线刚度矩阵选项。本单元的详细特性请参考理论手册。变截面非对称弹性梁单元的描述参见BEAM44,三维塑性梁单元的描述参见BEAM24。
关于非线性分析的几点忠告 了解程序的运作方式和结构的表现行为 如果你以前没有使用过某一种特别的非线性特性,在将它用于大的,复杂的模型前,构造一个非常简单的 模型(也就是,仅包含少量单元),以及确保你理解了如何处理这种特性。 通过首先分析一个简化模型,以便使你对结构的特性有一个初步了解。对于非线性静态模型,一个初步的 线性静态分析可以使你知道模型的哪一个区域将首先经历非线性响应,以及在什么载荷范围这些非线性将 开始起作用。对于非线性瞬态分析,一个对梁,质量块及弹簧的初步模拟可以使你用最小的代价对结构的 动态有一个深入了解。在你着手最终的非线性瞬时动态分析前,初步非线性静态,线性瞬时动态,和/或模 态分析同样地可以有助于你理解你结构的非线性动态响应的不同的方面。 阅读和理解程序的输出信息和警告。至少,在你尝试后处理你的结果前,确保你的问题收敛。对于与路程 相关的问题,打印输出的平衡迭代记录在帮助你确定你的结果是有效还是无效方面是特别重的。 简化 尽可能简化最终模型。如果可以将3─D结构表示为2─D平面应力,平面应变或轴对称模型,那么这样做, 如果可以通过对称或反对称表面的使用缩减你的模型尺寸,那么这样做。(然而,如果你的模型非对称加 载,通常你不可以利用反对称来缩减非线性模型的大小。由于大位移,反对称变成不可用的。)如果你可 以忽略某个非线性细节而不影响你模型的关键区域的结果,那么这样做。 只要有可能就依照静态等效载荷模拟瞬时动态加载。 考虑对模型的线性部分建立子结构以降低中间载荷或时间增量及平衡迭代所需要的计算时间。 采用足够的网格密度 考虑到经受塑性变形的区域要求一个合理的积分点密度。每个低阶单元将提供和高阶单元所能提供的一样
目录 非线性结构分析的定义 (1) 非线性行为的原因 (1) 非线性分析的重要信息 (3) 非线性分析中使用的命令 (8) 非线性分析步骤综述 (8) 第一步:建模 (9) 第二步:加载且得到解 (9) 第三步:考察结果 (16) 非线性分析例题(GUI方法) (20) 第一步:设置分析标题 (21) 第二步:定义单元类型 (21) 第三步:定义材料性质 (22) 第四步:定义双线性各向同性强化数据表 (22) 第五步:产生矩形 (22) 1
第六步:设置单元尺寸 (23) 第七步:划分网格 (23) 第八步:定义分析类型和选项 (23) 第九步:定义初始速度 (24) 第十步:施加约束 (24) 第十一步:设置载荷步选项 (24) 第十二步:求解 (25) 第十三步:确定柱体的应变 (25) 第十四步:画等值线 (26) 第十五步:用Post26定义变量 (26) 第十六步:计算随时间变化的速度 (26) 非线性分析例题(命令流方法) (27) 非线性结构分析 非线性结构的定义 在日常生活中,会经常遇到结构非线性。例如,无论何时用钉书针钉书,金 2
属钉书钉将永久地弯曲成一个不同的形状。(看图1─1(a))如果你在一个木架上放置重物,随着时间的迁移它将越来越下垂。(看图1─1(b))。当在 汽车或卡车上装货时,它的轮胎和下面路面间接触将随货物重量的啬而变化。(看图1─1(c))如果将上面例子所载荷变形曲线画出来,你将发现它们都显示了非线性结构的基本特征--变化的结构刚性. 图1─1 非线性结构行为的普通例子 3
非线性行为的原因 引起结构非线性的原因很多,它可以被分成三种主要类型: 状态变化(包括接触) 许多普通结构的表现出一种与状态相关的非线性行为,例如,一根只能拉伸的电缆可能是松散的,也可能是绷紧的。轴承套可能是接触的,也可能是不接触的, 冻土可能是冻结的,也可能是融化的。这些系统的刚度由于系统状态的改变在不同的值之间突然变化。状态改变也许和载荷直接有关(如在电缆情况中),也可能由某种外部原因引起(如在冻土中的紊乱热力学条件)。ANSYS程序中单元的激活与杀死选项用来给这种状态的变化建模。 接触是一种很普遍的非线性行为,接触是状态变化非线性类型形中一个特殊而重要的子集。 几何非线性 如果结构经受大变形,它变化的几何形状可能会引起结构的非线性地响应。一个例的垂向刚性)。随着垂向载荷的增加,杆不断弯曲以致于动力臂明显地减少,导致杆端显示出在较高载荷下不断增长的刚性。 4
《MATLAB数据处理与应用》 https://www.doczj.com/doc/55847625.html,/bbs/viewthread.php?tid=8787743&extra=&page=1 《战胜MATLAB必做练习50题》--满晓宇/罗捷--北京大学出版社--2001-11, https://www.doczj.com/doc/55847625.html,/bbs/viewthread.php?tid=8684485&highlight=matlab matlab学习指导教程 https://www.doczj.com/doc/55847625.html,/bbs/viewthread.php?tid=9077453&highlight=matlab 《Matlab宝典》 https://www.doczj.com/doc/55847625.html,/bbs/viewthread.php?tid=8787742&highlight=matlab MATLAB命令大全.pdf, https://www.doczj.com/doc/55847625.html,/bbs/viewthread.php?tid=8872051&highlight=matlab MATLAB函数速查手册DOC文档, https://www.doczj.com/doc/55847625.html,/bbs/viewthread.php?tid=9036014&highlight=matlab matlab聚类工具箱教程, https://www.doczj.com/doc/55847625.html,/bbs/viewthread.php?tid=8858415&highlight=matlab MATLAB高效编程技巧与应用25个案例分析, https://www.doczj.com/doc/55847625.html,/bbs/viewthread.php?tid=9062882&highlight=matlab 《MATLAB 遗传算法工具箱与应用》---雷英杰, https://www.doczj.com/doc/55847625.html,/bbs/viewthread.php?tid=8787725&highlight=matlab 《基于MATLAB的系统分析与设计- - -模糊系统》---楼顺天---西安电子科技大学出版社, https://www.doczj.com/doc/55847625.html,/bbs/viewthread.php?tid=8666654&highlight=matlab 自动控制:反馈的力量——使用MATLAB---特费斯---西安交通大学出版社 https://www.doczj.com/doc/55847625.html,/bbs/viewthread.php?tid=8666654&highlight=matlab MATLAB高级语言及其在控制系统中的应用---韩九强---西安交通大学出版社---1997年06月第1版 https://www.doczj.com/doc/55847625.html,/bbs/viewthread.php?tid=8666654&highlight=matlab MATLAB有限元分析与应用---P.I.Kattan---清华大学出版社----2004-04-01,版次:1 https://www.doczj.com/doc/55847625.html,/bbs/viewthread.php?tid=8666654&highlight=matlab 反馈控制问题:使用MATLAB及其控制系统工具箱---(美)弗雷德里克(Frederick,D.K.),(美)周(Chow,J.H.),张彦斌译----西安交大, https://www.doczj.com/doc/55847625.html,/bbs/viewthread.php?tid=8666654&highlight=matlab 先进PID控制及其MATLAB仿真---刘金琨著----电子工业出版社 https://www.doczj.com/doc/55847625.html,/bbs/viewthread.php?tid=8666654&highlight=matlab MATLAB语言工具箱---施阳...[等]编著---西北工业大学出版社 https://www.doczj.com/doc/55847625.html,/bbs/viewthread.php?tid=8666654&highlight=matlab Matlab工具箱应用指南——应用数学篇---李涛贺勇军刘志俭等----电子工业出版社---2000年05月第1版 https://www.doczj.com/doc/55847625.html,/bbs/viewthread.php?tid=8666654&highlight=matlab 模糊控制及其MATLAB应用---张国良... [等] 著---西安交通大学出版社 https://www.doczj.com/doc/55847625.html,/bbs/viewthread.php?tid=8666654&highlight=matlab 基于MATLAB的系统分析与设计——时频分析---胡昌华等编著---西安电子科技大学出版社----2001-7 ,印次: 1 https://www.doczj.com/doc/55847625.html,/bbs/viewthread.php?tid=8666654&highlight=matlab MATLAB语言与自动控制系统设计---魏克新等编---机械工业出版社---2001-05-01,版次:1 https://www.doczj.com/doc/55847625.html,/bbs/viewthread.php?tid=8666654&highlight=matlab
Beam188/189单元基于Timoshenko梁理论(一阶剪切变形理论:横向剪切应变在横截面上是常数,也就是说,变形后的横截面保持平面不发生扭曲)而开发的,并考虑了剪切变形的影响,适合于分析从细长到中等粗细的梁结构。该单元提供了无约束和有约束的横截面的翘曲选项。 Beam188是一种3D线性、二次或三次的2节点梁单元。Beam189是一种3D二次3节点梁单元。每个节点有六个或者七个自由度,包括x、y、z 方向的平动自由度和绕x、y、z 轴的转动自由度,还有一个可选择的翘曲自由度。该单元非常适合线性、大角度转动或大应变非线性问题。 beam188的应力刚化选项在任何大挠度分析中都是缺省打开的,从而可以分析弯曲、横向及扭转稳定问题(进行特征值屈曲分析或(采用弧长法或非线性稳定法)破坏研究)。 Beam188/beam189单元支持弹性、塑性,蠕变及其他非线性材料模型。这种单元还可以采用多种材料组成的截面。该单元还支持横向剪力和横向剪应变的弹性关系,但不能使用高阶理论证明剪应力的分布变化。下图是单元几何示意图:该单元的几何形状、节点位置、坐标体系和压力方向如图所示,beam188 由整体坐标系的节点i 和j 定义。 对于Beam188梁单元,当采用默认的KEYOPT(3)=0,则采用线性的形函数,沿着长度用了一个积分点,因此,单元求解量沿长度保持不变;当KEYOPT(3)=2,该单元就生成一个内插节点,并采用二次形函数,沿长度用了两个积分点,单元求解量沿长度线性变化;当KEYOPT(3)=3,该单元就生成两个内节点,并采用三次形函数,沿长度用了三个积分点,单元求解量沿长度二次变化; 当在下面情况下需要考虑高阶单元内插时,推荐二次和三次选项: 1)变截面的单元; 2)单元内存在非均布荷载(包含梯形荷载)时,三次形函数选项比二次选项提供更好的结果。(对于局部的分布荷载和非节点集中荷载情况,只有三次选项有效); 3)单元可能承受高度不均匀变形时。(比如土木工程结构中的个别框架构件用单个单元模拟时) Beam188单元的二次和三次选项有两个限制: 1)虽然单元采用高阶内插,但是beam188的初始几何按直线处理; 2)因为内节点是不可影响的,所以在这些节点上不允许有边界(或荷载或初始)条件。
(1)程序设计programming: abort: 中断计算 说明:abort命令中断当前计算并给出Scilab的提示符(“-->”)。如果用户使用pause命令进入高层界面,可使用abort命令回到初始层界面,出现Scilab的提示符(“-->”)。 Ans: 计算结果 说明:如果表达式的值没有被赋与任何变量,那么Scilab自动产生一个变量Ans,用来存储当前表达式的值。 backslash (\):矩阵左除 调用格式:如x=A\b 说明:backslash (\)代表矩阵左除,x=A\b是方程A*x=b的解。 如果A是一个方阵或者可逆矩阵(nonsingular或者invertible),那么x=A\b是方程A*x=b的唯一确定的解,且等于x=inv(A)*b. (通俗的说,就是方程数目等于未知数个数,所以解唯一。如A=[1 2 1;3 2 2;2 3 1],b=[8;13;11])如果A不是一个方阵,那么x是最小二乘解,此时,该解x使norm(A*x-b)最小。 (通俗的说,就是方程数目不等于未知数个数。 如果方程数目大于未知数个数,本来是没有准确解的,但可以根据最小二乘法原理拟合出最佳解。如A=rand(3,2);b=[1;1;1]。此时,由于A不是一个方阵,无法使用inv(A)命令,因此x=A\b 等效于x=pinv(A)*b. 如果方程数目小于未知数个数,应该有无穷个解,用x=A\b命令得出的解只是其中的一个解,而用pinv(A)*b命令得出的解则比较粗糙,没有用x=A\b命令得出的解精确。) 如果A是一个列满秩矩阵(矩阵的秩等于列数),那么此最小二乘解x=A\b是唯一能使norm(A*x-b)最小的解。 如果A不是一个列满秩矩阵,那么此最小二乘解x=A\b不能使norm(A*x-b)最小,使norm(A*x-b)最小的解应该是x=pinv(A)*b)。 inv(A)要求A是方阵,pinv(A)则不要求A是方阵 bool2s :将布尔矩阵转化为0、1矩阵 调用格式:bool2s(x) 参数:x是一个布尔向量或者布尔矩阵或者常数矩阵。 说明:如果x是一个布尔矩阵,bool2s(x)返回一个0、1矩阵,1代表真,0代表假。如果x 是一个普通矩阵,bool2s(x)也返回一个0、1矩阵,1代表非0的数字。 boolean:它表示Scilab对象或者布尔型变量和操作符与或非& | ~ 说明:布尔型变量为%T(代表真)%F (代表假)。这些变量可以用来定义矩阵。布尔型型矩阵可以像普通矩阵操作,如元素的抽取、插入与连接,但不能进行如( +, *, -, ^, )等运算,布尔型型矩阵有三个特殊的操作符号:与或非& | ~ brackets括号:包括左右圆括号(),左右方括号[]. 方括号调用格式:[a11,a12,...;a21,a22,...;...] 圆括号调用格式: [s1,s2,...]=func(...) 参数a11,a12,... : 任何合适的矩阵(实数, 多项式, 有理数等); 参数s1,s2,... : 任何变量名; 说明:[ ]用于向量定义或者矩阵连接或者用在调用函数的左边存储变量,而()用于函数调用。[ ]在用于矩阵连接时,空格、逗号用来隔开每“行”中的元素,分号、回车则用来隔开各“行”。[ ] 用在调用函数的左边存储变量时,必须用逗号隔开个变量。
一般来说,按“杆梁壳体”单元顺序,只要后一种单元的自由度完全包含前一种单元的自由度,则只要有公共节点即可,不需要约束方程,否则需要耦合自由度与约事方程。例如: (1)杆与梁、壳、体单元有公共节点即可,不需要约束方程。 (2)梁与壳有公共节点怒可,也不需要约束写约束方程;壳梁自由度数目相同,自由度也相同,尽管壳的rotz是虚的自由度,也不妨碍二者之间的关系,这有点类同于梁与杆的关系。 (3)梁与体则要在相同位置建立不同的节点,然后在节点处耦合自由度与施加约束方程。 (4)壳与体则也要相同位置建立不同的节点,然后在节点处耦合自由度与施加约束方程。 上面所述的不同单元之间的接连方法主要是用耦合自由度和约束方程来实现的,有一定的局限性,只适用于小位移,下面介绍一种支持大位移算法的方法,MPC法。 MPC即Multipoint Constraint,多点约束方程,其原理与前面所说的方程的技术几乎一致,将不连续、自由度不协调的单元网格连接起来,不需要连接边界上的节点完全一一对应。 MPC能够连接的模型一般有以下几种。 solid 模型-solid 模型 shell模型-shell模型 solid 模型-shell 模型 solid 模型-beam 模型 shell 模型-beam模型 在 ANSYS中,实现上述MPC技术有三种途径。 (1)通过MPC184单元定义模型的刚性或者二力杆连接关系。定义MPC184单元模型与定义杆的操作完全一致,而MPC单元的作用可以是刚性杆(三个自由度的连接关系)或者刚性梁(六个自由度的连接关系)。 (2)利用约束方程菜单路径Main Menu>preprocessor>Coupling/Ceqn>shell/solid Interface创建壳与实体模型之间的装配关系。 (3)利用ANSYS接触向导功能定义模型之间的装配关系。选择菜单路径Main
当一个结构构件的一个方向尺寸远远大于另外两个方向的尺寸时,3D构件就可以理想化为1D构件以提高计算效率。这样的单元有两类:以承受轴向拉压作用为主的杆单元,和承受弯曲作用为主的梁单元。 ANSYS提供的单元类型中共有9种梁单元,分别为BEAM3, BEAM4, BEAM23, BEAM24, BEAM44, BEAM54, BEAM161, BEAM188, BEAM189。在结构分析中常用的是BEAM4和BEAM188或BEAM189这三中梁单元。 BEAM4单元 1.BEAM4单元是一种具有拉压弯扭能力的3D弹性单元。每节点6个自由度。 2.BEAM4单元的定义包括:几何位置的确定,单元坐标系的确定,截面特性 的输入。 BEAM4单元包含两个节点(i,j)或三个节点(i,j,k),k为单元的方向节点;单元的截面特性用实常数(REAL)给出,主要包括截面(area),两个 方向的截面惯性矩(IZZ)和(IYY),两个方向的厚度(TKY和TKZ),相对单元坐标系x轴的方向角(THETA),扭转惯性矩(IXX)。其中惯性矩,厚度,方向角都是在单元坐标系下给出的。 3.BEAM4单元坐标系的方向确定如下:单元坐标系X轴由节点i,j连线方 向确定由i指向 j;对于两节点确定的BEAM4单元,若方向角theta=0,则单元坐标系y轴默认平行于整体坐标系的x-y平面;若单元坐标系x 轴与整体坐标系z轴平行,则单元坐标系y轴默认平行整体坐标系的y 轴,z轴由右手法则判定;若用户希望自己来控制单元绕单元坐标系x轴的转动角,则可以通过方向角theta或第三个节点k来实现,i,j,k 确定一个平面,单元坐标系的Z轴就在该平面内。 可以用下列命令查看单元坐标系及截面: /ESHAPE, 1 /PSYMB, ESYS 说明:在指定网格划分属性时,可将某一关键点作为方向点属性赋予所需划分的线,这样就生成包含3个节点的梁单元。(具体见后面) 4.单元压力荷载(pressure)的施加比较特殊。只能用SFBEAM命令来实现, 通过其他方式施加荷载都是无效的,其中LKEY为荷载方向号。 5.beam4单元应力输出:包括轴向正应力,弯曲应力,两者的合应力。 命令:PRESOL,ELEM GUI:LIST RESULT〉ELEM SOLUT〉LINEELEM RESULT
ansys单元类型种类统计 单元名称种类单元号 LINK (共12种) 1,8,10,11,31,32,33,34,68,160,167,180 PLANE (共20种)2,13,25,35,42,53,55,67,75,77,78,82,83,121,145,146,162,182,183,223 BEAM (共09种)3,4,23,24,44,54,161,188,189 SOLID (共30 种)5,45,46,62,64,65,69,70,87,90,92,95,96,97,98,117,122,123,127,128,147,148,164,168, 185,186,187,191,226,227 COMBIN (共05种)7,14,37,39,40 INFIN (共04种)9,47,110,111 CONTAC (共05种)12,26,48,49,52 PIPE (共06种)16,17,18,20,59,60 MASS (共03种)21,71,166 MATRIX (共02种)27,50 SHELL (共19种)28,41,43,51,57,61,63,91,93,99,131,132,143,150,157,163,181,208,209 FLUID (共14种)29,30,38,79,80,81,116,129,130,136,138,139,141,142 SOURC (共01种)36 HYPER (共06种)56,58,74,84,86,158 VISCO (共05种)88,89,106,107,108 CIRCU (共03种)94,124,125 TRANS (共02种)109,126 INTER (共05种)115,192,193,194,195 HF (共03种)118,119,120 ROM (共01种)144 SURF (共04种)151,152,153,154 COMBI (共01种)165 TARGE (共02种)169,170 CONTA (共06种)171,172,173,174,175,178 PRETS (共01种)179 MPC (共01种)184 MESH (共01种)20
ANSYS中有七八种梁单元,它们的特点和适用范围各不相同。了解这些单元之间的异同,有助于正确选择单元类型和得到较为理想的计算结果。 梁是一种几何上一维而空间上二维或三维的单元,主要用于模拟一个方向长度大于其它两方向的结构形式。也就是说,主要指那些细长、像柱子一样的结构,只要横截面的尺寸小于长度尺寸,就可以选用梁单元来模拟(这在一定意义上和壳单元在一个方向上比另外两个方向都薄原理相似)。通常来讲,横截面尺寸需要小于长度的1/20或1/30,这里的长度是指两支撑点间的物理意义上的距离。梁单元本身可以进行任意的网格划分,且不支配梁理论的适用性;反过来,就像刚才提到的那样,物理尺寸和特性将决定选择哪种单元更为合适。 有两种基本的梁单元理论:铁木辛格(剪切变形)理论和欧拉-伯努力理论。ANSYS 中的如下单元是基于欧拉-伯努力梁理论: 1.2D/3D elastic BEAM3/4 2.2D plastic BEAM23 3.2D/3D offset tapered,unsymmetric BEAM54/44 4.3D thin-walled,plastic BEAM24 欧拉-伯努力梁理论建立在如下假定的基础上: 1.单元形函数为Hermitian多项式,挠度是三次函数; 2.弯矩可以线性改变; 3.不考虑横截面剪切变形; 4.扭转时截面不发生翘曲; 5.只具有线性材料能力(部分单元BEAM23/24具有有限的非线性材料能力); 6.非常有限的前后处理能力(除了BEAM44)。 ANSYS中有两种梁单元(BEAM188和BEAM189)是基于铁木辛格(剪切变形)理论,这种梁理论主要建立在如下假定基础上: 1.单元形函数为拉格朗日插值多项式,具有线性或二次的位移函数; 2.横向剪应力沿厚度方向为常数(一阶剪切变形梁单元); 3.可以模拟自由或约束扭转效应; 4.支持丰富的模型特性(塑性和蠕变); 5.强大的前生处理能力。 使用中需要注意: (1)铁木辛格(剪切变形)理论是基于一阶剪切变形理论的,它不能准确地求解短粗梁,因此,ANSYS在帮助里指出该类型梁的适用范围是:GAl2/EI>30,对于那些高跨比较大的梁应选用实体单元求解; (2)ANSYS中2结点的铁木辛格(剪切变形)单元BEAM188对网格密度的依赖性较强,选用时单根构件单元数应不小于5或不小于3,并且打开KEYOPT(3),否则误差会较大。
单元生死法的使用 收藏到手机转发评论 2006-06-17 23:04 单元生死法的使用 在大多数静态和非线形瞬态分析小,都可以使用单元死活行为,与其他分析一样,分析过 程包括建摸、加载并求解和查看结果3个主要步骤。 1.建立模型 在PREP7中创建所有单元,包括那些在开始“死掉”,在以后的荷载少中被激活的单元。 不能在求解过程中创建新的单元。 2.加载和求解 (1)指定分析类型。 (2)定义第—个荷载步。 在结构分析中应激活大变形效应: ● 命令:NLGEOM,ON GUI:mainnMenu->preprocessor->Loads->Analysis Options Main Menu->Solution->Sol'n Controls Main Menu->Solution->AnalysisOptions 使用单元生死选项叫,应设置Newton-Raphson选项: 命令:NROPT,Option,—,Adptky GUI:Main Menu->Preprocessor->Loads->AnalysisOptions Main Menu->Solution->Analysis Options 提示:打开自适应下降因子的全牛顿-拉普森选项通常会产生更好的结果。 杀死所有要在后续荷载步“生”(激活)的单元: 命令:EKILL,ELEM GUI:main Menu->Preprocessor->Loads->Other->Kill Elements Main Menu->Solution->Other->Kill Elements 重新定义刚度缩减因子: ● 命令:ESTIF,KMULT GUI:Main Menu->Preprocessor->Loads->Other->SfiffnessMult Main Menu->Solution->Other->StiffnessMult 注童:不与任何“生”的单元相连的结点将可能“漂移”,为了减少求 解的方程数和避免 病态条件,需要约束死的自由度。当单元变“生”时,必须删除这些人 为约束。 第一个荷载步的命令流示例: