Levelflex M
FMP40
()
()
4...20mA HART PROFIBUS PA (FF)IEC 61508
/IEC 61511-1SIL 2
WHG
4...20mA HART
PROFIBUS PA
(FF)
Levelflex M FMP40(3/4")
(DN40)
35m
ATEX FM CSA TIIS NEPSI IECEx
Services Pressure Flow Temperature
Liquid Analysis
Registration
System
Components
Level Solutions
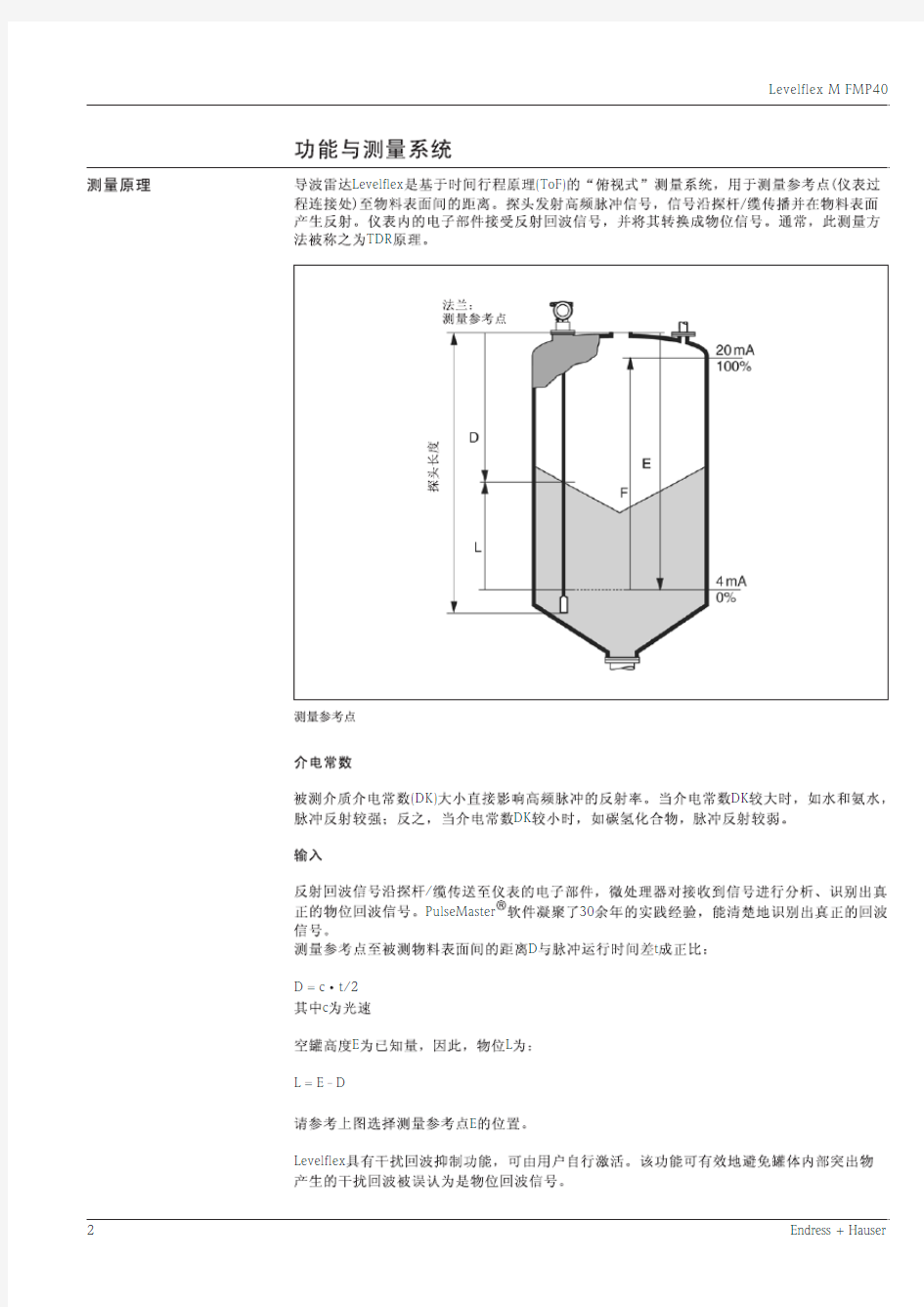
Levelflex (ToF)
TDR
(DK)
DK
DK
D
t
D =c t/2
c
E
L
L
=E -D
E
Levelflex
Levelflex M FMP40
Levelflex M FMP40
(DK )
(DK )
()
12//
Levelflex M FMP40
/
E
F
4mA 20mA
E F
0%100%
32
11/2"
1)
2)Levelflex M FMP40
3/4"
1)2)
HART
HART
HART
250
Levelflex M FMP40
PLC
RMA422RN221N
()
FXA191/195DXR375
FieldCare Commubox FXA191/195
HART DXR 375
VU331
()
FXA291/ToF FXA291
FieldCare
(FF)
32
(
Ex em
Ex d )Ex ia IIC
EN 160079-14
PROFIBUS PA
32(
FISCO
Ex ia IIC
10
)
Levelflex M FMP40
Profibard Proficard
FieldCare
VU 331
(FieldCare
FXA291/ToF FXA291
VU331
NI-FBUS
(
)
FF
375/FC375
(FF)
FXA291/ToF FXA291
Levelflex M FMP40
Endress+Hauser NRF590
4...20mA/(I/O)
HART
Fieldgate
Fieldgate
Fieldgate
XML
Fieldgate E-mail SMS
HART HART(FieldCare)Fieldgate
FieldNetCalc
TI400F(FXN520)Endress+Hauser
https://www.doczj.com/doc/4917018343.html, Levelflex M FMP40
HART FieldCare
HTTP
Web
FXN520 GSM
Levelflex M FMP40
E
(32)()
Levelflex M FMP40
Levelflex
FMP45
Levelflex M FMP4010m TSP
(UB)()
1) 2) 3)
(UB) TSP
100MHz...1.5GHz Levelflex M FMP40
FHX40
Levelflex M FMP40
Levelflex M
32
FieldCare
F12
Ex ia
T12
Ex e
Ex d
Ex ia()
F23 1.4435/316L F23
Ex ia
350o
EMC
0.5...2.5mm 2
Levelflex M FMP40
4...20mA HART
4...20mA HART(
)
()
(>250)
(>250)
PCS
HART
NRF590
TI402F/00/en
RFI
(
TI 241/00/en EMC
)
PROFIBUS PA
(
)BA034S PROFIBUS
DP/PA
PNO
A
BA034S
PROFIBUS DP/PA
PNO
2.092
PROFIBUS DP/PA IEC 61158-2(MBP)
Levelflex M FMP40
(FF)
()BA013S
(FF)
(FF)
A
BA 013S (FF)(FF)
IEC
61158-2(MBP)
(M12
7/8)
M12PROFIBUS PA
(PROFIBUS PA
)
Levelflex M FMP40
min.60mW max.900mW
HART
HART 3.6...22mA;11mA
PROFIBUS PA
11mA
(FF)
(DINEN60079-1460060-1
(10kA8/20s)
600V T12
(HAW262Z)
Levelflex M FMP40
+205
1013mbar abs.65%
0.8(
(
1m)
30cm 1m
DK =80()DK =2()
20mbar ()20%
(DIN EN 61298-2)
(
)
DC<70...250mm
/12mm (
offset 057)
Levelflex M FMP40
1mm
0.03%
(K )
EN 61298-3
(HART PROFIBUS PA (FF))
T 0.6mm/10K
3.5mm(
-40...+80
)
(
16mA)
T 0.032%/10K 0.35%(-40
...+80
)
T 0.05%/10K
0.5%(
-40...+80
)(16mA)
T 0.02%/10K 0.29%(-40...+80)T 0.06%/10K
0.89%(
-40
...+80
)
FMP40
(4mA)
(20mA)
(4mA)
(20mA)
K K K K K 1s 0.7
s
Levelflex M
FMP40
(2)
/
/
(B)
100mm
/
300mm
/
300mm
/
(C)
150mm 50mm
10mm
(1)
(
)
(max.2m)
4m
500cst
DK=1.4
(
)
EMC
PA
(5)(
)
300mm
(5)
Levelflex M FMP40
d=45mm (DN 50+DN 65)d=75mm (DN 80+DN 100)
(
)
(
16mm)
10m 20Nm
500mm 1000mm
15
Nm
/
50...150mm 150
mm
Levelflex M FMP40 HF
()
(B)
B1m0.5m
/
()
/
Endress+Hauser
导波雷达料位计的原理及应用 导波雷达料位计的原理及应用 一、导波雷达料位计概述 料位是工业生产中的一个重要参数。料位测量的方法很多,针对不同的工况和介质可以使用不同测量原理的料位计,吹气法、静压式、浮球式、重锤式、超声波等几种常用的料位测量仪表,都有各自的特点和应用范围。导波雷达料位计运用先进的雷达测量技术,以其优良的性能,尤其是在槽罐中有搅拌、温度高、蒸汽大、介质腐蚀性强、易结疤等恶劣的测量条件下,显示出其卓越的性能,在工业生产中发挥着越来越重要的作用。 二、原理及技术性能 雷达波是一种特殊形式的电磁波,导波雷达料位计利用了电磁波的特殊性能来进行料位检测。电磁波的物理特性与可见光相似,传播速度相当于光速。其频率为300MHz-3000GHz。电磁波可以穿透空间蒸汽、粉尘等干扰源,遇到障碍物易于被反射,被测介质导电性越好或介电常数越大,回波信号的反射效果越好。 雷达波的频率越高,发射角越小,单位面积上能量(磁通量或场强)越大,波的衰减越小,导波雷达料位计的测量效果越好。 1.导波雷达料位计的基本原理 导波雷达料位计组成:它主要由发射和接收装置、信号处理器、天线、操作面板、显示、故障报警等几部分组成。 发射-反射-接收是导波雷达料位计工作的基本原理。雷达传感器的天线以波束的形式发射最小5.8GHz的雷达信号。反射回来的信号仍由天线接收,雷达脉冲信号从发射到接收的运行时间与传感器到介质表面的距离以及物位成比例。
即:h=?H–vt/2? 式中?h为料位;H为槽高;?v为雷达波速度;t为雷达波发射到接收的间隔时间;2.导波雷达料位计测量料位的先进技术: (1)回波处理新技术的应用 从导波雷达料位计的测量原理可以知道,导波雷达料位计是通过处理雷达波从探头发射到介质表面然后返回到探头的时间来测量料位的,在反射信号中混合有许多干扰信号,所以,对真实回波的处理和对各种虚假回波的识别技术就成为导波雷达料位计能够准确测量的关键因素。 (2)测量数据处理: 由于液面波动和随机噪声等因素的影响,检测信号中必然混有大量噪声。为了提高检测的准确度,必须对检测信号进行处理,尽可能消除噪声。 经过大量的实验验证,采用数据平滑方法可以达到满意的效果。此方法也可有效的克服罐内搅拌器对测量的影响。 (3)导波雷达料位计的特点: 由于导波雷达料位计采用了上述先进的回波处理和数据处理技术,加上雷达波本身频率高,穿透性能好的特点,所以,导波雷达料位计具有比接触式料位计和同类非接触料位计更加优良的性能。 ①可在恶劣条件下连续准确地测量。 ②操作简单,调试方便。 ③准确安全且节省能源。 ④无需维修且可靠性强。 ⑤几乎可以测量所有介质。
超声波检测的倒车雷达讲解 倒车雷达(Car Reversing Aid Systems)的全称是“倒车防撞雷达”,也称“泊车辅助装置”,是汽车泊车安全辅助装置,能以声音或者更为直观的显示告知驾驶员周围障碍物的情况,解除了驾驶员泊车和起动车辆时前后左右探视所引起的困扰,并帮助驾驶员扫除了视野死角和视线模糊的缺陷,提高了安全性。 系统工作原理 倒车雷达只需要在汽车倒车时工作,为驾驶员提供汽车后方的信息。由于倒车时汽车的行驶速度较慢,和声速相比可以认为汽车是静止的,因此在系统中可以忽略多普勒效应的影响。在许多测距方法中,脉冲测距法只需要测量超声波在测量点与目标间的往返时间,实现简单,因此本系统采用了这种方法。 如图1所示,驾驶员将手柄转到倒车档后,系统自动启动,超声波发送模块向后发射40kHz的超声波信号,经障碍物反射,由超声波接收模块收集,进行放大和比较,单片机AT89C2051将此信号送入显示模块,同时触发语音电路,发出同步语音提示,当与障碍物距离小于1m、0.5m、0.25m 时,发出不同的报警声,提醒驾驶员停车。 图1 系统工作原理框图
图2 超声波发送模块电路 [NextPage] 硬件设计 1 超声波发送模块设计 超声波发送器包括超声波产生电路和超声波发射控制电路两个部分,超声波探头(又称“超声波换能器”)选用CSB40T,可采用软件发生法和硬件发生法产生超声波。前者利用软件产生40kHz的超声波信号,通过输出引脚输入至驱动器,经驱动器驱动后推动探头产生超声波。这种方法的特点是充分利用软件,灵活性好,但需要设计一个驱动电流在100mA以上的驱动电路。第二种方法是利用超声波专用发生电路或通用发生电路产生超声波信号,并直接驱动换能器产生超声波。这种方法的优点是无须驱动电路,但缺乏灵活性。 本设计采用第一种方法产生超声波,电路设计如图2所示。40kHz的超声波是利用555时基电路振荡产生的。其振荡频率计算式为f=1.43/((R 9+2·R 10)·C 5)。将R 10设计为可调电阻的目的是为了调节信号频率,使之与换能器的40kHz固有频率一致。为保证555时基具有足够的驱动能力,宜采用+12V电源。CNT为超声波发射控制信号,由单片机进行控制。 图3 超声波接收模块电路 2 超声波接收模块设计 超声波接收器包括超声波接收探头、信号放大电路及波形变换电路三部分。超声波探头必须采用与发射探头对应的型号,关键是频率要一致,本设计采用CSB40R,否则将因无法产生共振而影响接收效果,甚至无法接收。由于经探头变换后的正弦波电信号
Digital PABX System 数字程控用户交换机 DX1S 简易操作手册 目录 1. DX1S设备介绍 (1) 1.1 整机描述 (1) 1.2 专用话机:MT-24. 2 1.3 DX1S板卡介绍 (3) 1.3.1 MCC V4中央控制板 (3) 1.3.2 PRI数字中继板 (4) 1.3.3 中继/用户板 (5) 1.3.4 用户板 (6) 1.3.5 MIC多功能用户板 (7) 1.3.6 GGC中央控制板(DX1S-G专用) (8) 1.3.7 GMC模块控制板(DX1S-G专用) (9) 1.3.8 GDT数字中继板(DX1S-G专用) (10) 2. 应用方案 (11) 2.1 中小企业一般应用 (11) 2.2 企业E1接入(总机+DID放号) (12) 2.3 企业双路由应用 (13) 2.4 企业组网应用 (15) 2.5 酒店应用 (17) 3. 常用功能操作 (19) 3.1 DX1S-V/U/M系列 (19) 3.1.1 普通话机操作 (19) 3.1.2 多功能话机操作 (20) 3.1.3 电脑话务员录音 (21) 3.2 DX1S-G系列 (24) 3.2.1 功能接入码操作 (24) 3.2.2 多功能话机操作 (25) 3.2.3 电脑话务员录音 (25) 4. 数据编程 (28) 4.1 DX1S-V/U/M系列 (28) 4.1.1 MFC98话务台的连接 (28) 4.1.2 新开通注意事项 (32) 4.1.3 修改分机、拨号等级、功能等级 (32) 4.1.4 数字编号方案 (34)
4.1.5 修改中继群 (35) 4.1.6 修改中继应答分机(呼入应答),中继服务类型 (37) 4.1.7 修改计费账号、密码、等级: (37) 4.1.8 多功能话机配置软件 (38) 4.1.9 计费系统 (39) 4.2 DX1S-G系列 (42) 4.2.1 呼叫处理流程 (42) 4.2.2 Netsys_G v1.2.8 STD网管软件 (43) 4.2.3 新开通注意事项: (44) 4.2.4 设置字冠表、路由表 (48) 4.2.5 设置出局中继群及选中继方法 (51) 4.2.6 设置分机号码 (52) 4.2.7 设置大客户编程 (54) 4.2.8 设置GMC连选群编程 (54) 4.2.9 设置分机拨号等级,功能等级 (54) 4.2.10 设置功能等级分配 (55) 4.2.11 设置环路入中继应答分机 (56) 4.2.12 设置账号密码 (57) 4.2.13 MFC话务台 (57) 4.2.14 多功能话机配置软件 (58) 4.2.15 计费软件 (59) 4.2.16 GGC软件升级 (61) 5. 故障分析及处理 (62) 5.1 故障定位的一般原则 (62) 5.2 故障定位的一般步骤及常用方法 (62) 5.3 常见故障及处理 (64) 5.3.1 分机类故障 (64) 5.3.2 环路中继类 (68) 5.3.3 数字中继类 (70) 5.3.4 计费软件类 (72) 5.3.5 其他 (73) 1. DX1S设备介绍 1.1 整机描述
导波雷达物位计 使用手册 重庆霍克川仪仪表有限公司
目录 测量原理 (3) 产品介绍 (4) 安装指南 (5) 仪表调试 (10) 接线方式 (21) 技术参数 (21) 产品选型 (22)
MPS2000系列导波雷达物位计 测量原理 导波雷达是基于TDR(时间行程)原理的测量仪表。 探头发出高频脉冲并沿缆绳传播,当脉冲遇到物料表面 时反射回来被仪表内接收器接收。通过独特的等效采样 技术,将记录脉冲发射到接收之间的时间差,最终转化 为仪表到料位之间的距离。并将距离信号转化为物位信 号。 输入 反射的脉冲信号沿缆绳传导至仪表电子线路部分,微处理器对此信号进行处理,识别出 微波脉冲在物料表面所产生的回波。正确的回波信号识别由智能软件完成,距离物料表面的距离D与脉冲的时间行程T成正比: D=C×T/2 其中C为光速 因空罐的距离E已知,则物位L为: L=E-D 输出 通过输入空罐高度(零点),满罐高度(满量程)及一些现场工况和应用参数来来使得仪表自动使用现场的测量环境,对应料位的比例输出4~20mA电流信号以及HART仪表总线上的数据。
产品介绍
安装指南 下述的安装指南适用于缆式和杆式探头测量固体颗粒料和 液体物体。同轴管式探头只适用于液体物体。 安装位置: 尽量远离出料口和进料口。 对金属罐和塑料罐,在整个量程范围内不碰壁。如果是金属罐, 物位仪表不要安装在罐的中央。 建议安装在料仓直径的1/4处。 缆式探头或杆式探头离罐壁最小距离不小于30厘米。 探头底部距罐底大约30mm。 探头距罐内障碍物最小距离不小于200mm。 如果容器底部是锥型的,传感器可以安装 罐顶中央,这样可以一直测量到罐底。 测量范围 说明: H----测量范围 L----空罐距离 B----顶部盲区 E----探头到罐壁的最小距离 顶部盲区是指物料最高料面与测量参考点之间的最小距离。 底部盲区是指缆绳最底部附近无法精确测量的一段距离。 顶部盲区和底部盲区之间是有效测量距离。 注意: 只有物料处于顶部盲区和底部盲区之间时,才能保证罐内物位的可靠测量。
一、雷达液位计 测量原理 发射能量很低的极短的微波脉冲通过天线系统发 射并接收。雷达波以光速运行。运行时间可以通 过[wiki]电子[/wiki]部件被转换成物位信号。一 种特殊的时间延伸方法可以确保极短时间内稳定 和精确的测量。 即使工况比较复杂的情况下,存在虚假回波,用 最新的微处理技术和调试[wiki]软件[/wiki]也 可以准确的分析出物位的回波。 输入 天线接收反射的微波脉冲并将其传输给电子线 路,微处理器对此信号进行处理,识别出微脉冲 在物料表面所产生的回波。正确的回波信号识别 由智能软件完成,精度可达到毫米级。距离物料 表面的距离D与脉冲的时间行程T成正比: D=C×T/2 其中C为光速 因空罐的距离E已知,则物位L为: L=E-D 输出 通过输入空罐高度E(=零点),满罐高度F(=满量程)及一些应用参数来设定,应用参数将自动使仪表适应测量[wiki]环境[/wiki]。对应于4-20mA输出。 应用介质: λ KONERD60系列雷达物位计适用于对液体、浆料及颗粒料的物位进行非接触式连续测量,适用于温度、压力变化大;有惰性气体及挥发存在的场合。 λ采用微波脉冲的测量方法,并可在工业频率波段范围内正常工作。波束能量较低,可安装于各种金属、非金属容器或管道内,对人体及环境均无伤害。 二、超声波液位计 是由微处理器控制的数字物位仪表。在测量中 脉冲超声波由传感器(换能器)发出,声波经物体表面 反射后被同一传感器接收,转换成电信号。并由声波的 发射和接收之间的时间来计算传感器到被测物体的距 离。由于采用非接触的测量,被测介质几乎不受限制, 可广泛用于各种液体和固体物料高度的测量。 采用SMD技术,提高仪器可靠性。 自动功率调整、增益控制、温度补偿。 先进的检测技术,丰富的软件功能适应各种复杂环境。 采用新型的波形计算技术,提高仪表的测量精度。 具有干扰回波的抑止功能保证测量数据的真实。
一原理 产品简介及工作原理: MT5000是4~20mA回路供电采用微处理器的智能物位变送器,可提供HART或Honeywell DE数字信号输出。它使用非常低的微波能量来探测被测物体的物位。为了获得最好的性能,了解其工作原理是很重要的。电子变送器外壳安装在一个特殊的连接器上配合过程连接,并且密封,同时带一个硬杆或电缆。这个形如探杆的硬杆或电缆悬挂在容器中,起一个导波的作用,也就是说微波能量集中在探杆中,并沿着探杆传递,从而替代没有探杆的锥形散射。 一个测量周期由以下几步组成: 1、电子变送器产生一个非常短的微波能量脉冲,沿着探杆传递。 2、脉冲沿着探杆传递,直到它遇到一个不连续的,突然的介电常数的变化,像物 位面,能量被反射回来并沿着导波管传递到电子变送器。 3、当反射脉冲到达电子变送器时,被其检测到。通过测量消逝的时间从起始脉冲 到反馈脉冲,电子变送器可以计算出待测的物位。 4、由于微波以光速传递,一个完整的测量周期是由几千个脉冲组成。电子部件使 用采样技术来重建复制一个实际时间信号波形,但以低得多的速度,以便微处 理器能够处理。这个过程类似如频闪观测仪的效果,当用频闪灯光来观察高速 运转的机器时候。 5、测量周期是每秒10次,同时,在产生当前的输出信号(正比于待测的物位) 以前,使用独特的滤波技术进行处理,保证信号的精度。 探测信号过程如下: 1、起始脉冲 2、不连续反射 3、从物位返回来的信号 4、从探杆末端返回来的信号 测量原理本质上基于这样一个事实:介电常数的突变将产生一个在基线下有一定振幅的负脉冲。介电常数变化越大,反馈回来的信号的幅度也越大。这意味着如果存在一个实质性的变化,如从管嘴的直径到一个敞开的容器,例如下图所示过程连接的曲线图。 在正确配置MT5000工作时,需要考虑这个事实 下页图是回波信号示意图,我们可以在示波器上看到以下图示情形。
雷达物位计使用说明书
目录 一、脉冲型雷达物位计 测量原理-------------------------------------------------------------------------------------------1 产品简介------------------------------------------------------------------------------------------2 安装指南------------------------------------------------------------------------------------------3 仪表尺寸------------------------------------------------------------------------------------------7测量条件------------------------------------------------------------------------------------------9 编程调试-------------------------------------------------------------------------------------------9 技术参数------------------------------------------------------------------------------------------11 产品选型------------------------------------------------------------------------------------------12 二、导波型雷达物位计 测量原理-------------------------------------------------------------------------------------------15 产品简介--------------------------------------------------------------------------------------------17 安装指南--------------------------------------------------------------------------------------------18 调试--------------------------------------------------------------------------------------------21 仪表尺寸---------------------------------------------------------------------------------------------22 技术参数--------------------------------------------------------------------------------------------22 产品选型--------------------------------------------------------------------------------------------23
导波雷达液位计变送器的安装调试 污水处理污水池液位(VEGA Hart协议) 1、原理:雷达波是一种特殊形式的电磁波,导波雷达料位计利用了电磁波的特殊性能来行料位检测。电磁波的物理特性与可见光相似,传播速度相当于光速。其频率为300MHz- 3000GHz。电磁波可以穿透空间蒸汽、粉尘等干扰源遇到障碍物易于被反射,被测介质导电性越好或介电常数越大,回波信号的反射效果越好。雷达波的频率越高,发射角越小,单位面积上能量(磁通量或场强)越大,波的衰减越小,导波雷达料位计的测量效果越好。 2、导波雷达料位计组成:它主要由发射和接收装置、信号处理器、天线、操作面板、显示、故障报警等几部分组成。发射-反射-接收是导波雷达料位计工作的基本原理。雷达传感器的天线以波束的形式发射最小5.8GHz的雷达信号。反射回来的信号仍由天线接收,雷达脉冲信号从发射到接收的运行时间与传感器到介质表面的距离以及物位成比例。 即:h=H–vt/2 式中h为料位;H为槽高;v为雷达波速度;t为雷达波发射到接收的间隔时间。 3、安装应注意的问题(1)当测量液态物料时,传感器的轴线和介质表面保持垂直;当测量固态物料时,由于固体介质会有一个堆角,传感器要倾斜一定的角度。(2)尽量避免在发射角内有造成假反射的装置。特别要避免在距离天线最近的1/3锥形发射区内有障碍装置(因为障碍装置越近,虚假反射信号越强)。若实在避免不了,建议用一个折射板将过强的虚假反射信号折射走。这样可以减小假回波的能量密度,使传感器较容易地将虚假信号滤出。(3)要避开进料口,以免产生虚假反射。(4)传感器不要安装在拱形罐的中心处(否则传感器收到的虚假回波会增强),也不能距离罐壁很近安装,最佳安装位置在容器半径的1/2处。(5)要避免安装在有很强涡流的地方。如:由于搅拌或很强的化学反应等,建议
超声波液位计和雷达液位计的区别 我们一般把声波频率超过20kHz的声波称为超声波,超声波是机械波的一种,即是机械振动在弹性介质中的一种传播过程,它的特征是频率高、波长短、绕射现象小,另外方向性好,能够成为射线而定向传播。超声波在液体、固体中衰减很小,因而穿透能力强,尤其是在对光不透明的固体中,超声波可穿透几十米的长度,碰到杂质或界面就会有显著的反射,超声波测量物位就是利用了它的这一特征。 在超声波检测技术中,不管那种超声波仪器,都必须把电能转换超声波发射出去,再接收回来变换成电信号,完成这项功能的装置就叫超声波换能器,也称探头。如图所示,将超声波换能器置于被测液体上方,向下发射超声波,超声波穿过空气介质,在遇到水面时被反射回来,又被换能器所接收并转换为电信号,电子检测部分检测到这一信号后将其变成液位信号进行显示并输出。 由超声波在介质中传播原理可知,若介质压力、温度、密度、湿度等条件一定,则超声波在该介质中传播速度是一个常数。因此,当测出超声波由发射到遇到液面反射被接收所需要的时间,则可换算出超声波通过的路程,即得到了液位的数据。 超声波有盲区,安装时必须计算预留出传感器安装位置与测量液体之间的距离。 雷达液位计采用发射—反射—接收的工作模式。雷达液位计的天线发射出电磁波,这些波经被测对象表面反射后,再被天线接收,电磁波从发射到接收的时间与到液面的距离成正比,关系式如下: D=CT/2 式中 D——雷达液位计到液面的距离 C——光速 T——电磁波运行时间
雷达液位计记录脉冲波经历的时间,而电磁波的传输速度为常数,则可算出液面到雷达天线的距离,从而知道液面的液位。 在实际运用中,雷达液位计有两种方式即调频连续波式和脉冲波式。采用调频连续波技术的液位计,功耗大,须采用四线制,电子电路复杂。而采用雷达脉冲波技术的液位计,功耗低,可用二线制的24V DC供电,容易实现本质安全,精确度高,适用范围更广。 超声波用的是声波,雷达用的是电磁波,这才是最大的区别。而且超声波的穿透能力和方向性都比电磁波强的多,这就是超声波探测现在比较流行的原因。 主要应用场合的区别: 1.雷达测量范围要比超声波大很多。 2.雷达有喇叭式、杆式、缆式,相对超声波能够应用于更复杂的工况。 3.超声波精度不如雷达。 4.雷达相对价位较高。 5.用雷达的时候要考虑介质的介电常数。 6.超声波不能应用于真空、蒸汽含量过高或液面有泡沫等工况。
超声波液位计和雷达液位 计的区别 The Standardization Office was revised on the afternoon of December 13, 2020
超声波液位计和雷达液位计的区别 我们一般把声波频率超过20kHz的声波称为超声波,超声波是机械波的一种,即是机械振动在弹性介质中的一种传播过程,它的特征是频率高、波长短、绕射现象小,另外方向性好,能够成为射线而定向传播。超声波在液体、固体中衰减很小,因而穿透能力强,尤其是在对光不透明的固体中,超声波可穿透几十米的长度,碰到杂质或界面就会有显著的反射,超声波测量物位就是利用了它的这一特征。 在超声波检测技术中,不管那种超声波仪器,都必须把电能转换超声波发射出去,再接收回来变换成电信号,完成这项功能的装置就叫超声波换能器,也称探头。将超声波换能器置于被测液体上方,向下发射超声波,超声波穿过空气介质,在遇到水面时被反射回来,又被换能器所接收并转换为电信号,电子检测部分检测到这一信号后将其变成液位信号进行显示并输出。 由超声波在介质中传播原理可知,若介质压力、温度、密度、湿度等条件一定,则超声波在该介质中传播速度是一个常数。因此,当测出超声波由发射到遇到液面反射被接收所需要的时间,则可换算出超声波通过的路程,即得到了液位的数据。 超声波有盲区,安装时必须计算预留出传感器安装位置与测量液体之间的距离。
采用发射—反射—接收的工作模式。雷达液位计的天线发射出电磁波,雷达波以光速运行。这些波经被测对象表面反射后,再被天线接收,电磁波从发射到接收的时间与到液面的距离成正比,关系式如下: D=CT/2 式中D——到液面的距离 C——光速 T——电磁波运行时间 雷达液位计记录脉冲波经历的时间,而电磁波的传输速度为常数,则可算出液面到雷达天线的距离,从而知道液面的液位。 在实际运用中,雷达液位计有两种方式即调频连续波式和脉冲波式。采用调频连续波技术的液位计,功耗大,须采用四线制,电子电路复杂。而采用雷达脉冲波技术的液位计,功耗低,可用二线制的24V DC供电,容易实现本质安全,精确度高,适用范围更广。 超声波用的是声波,雷达用的是电磁波,这才是最大的区别。而且超声波的穿透能力和方向性都比电磁波强的多,这就是超声波探测现在比较流行的原因。 主要应用场合的区别:
Magnetrol导波雷达液位计调试步骤 变送器表头示意图 2 组态问题 对Eclipse变送器组态需要一些关键的参数。在开始组态前首先填写下列运行参数
Eclipse 变送器出厂时均设为默认值可在现场重新组态。下面给出了最小化的组 态说明。 1、 变送器供电。 显示器上每隔5秒交替显示四个值:Status (状态)、Level (高度)、%Output (输出%)和Loop current (回路电流)。 2、 移走底部电子隔间的盖。 3、 使用上下键( )从组态程序的一个步骤转到另一个步骤。 4、 叹号(!)。5、 )来增加或减少显示值或滚读选项。 6、 7、 10秒后从变送器移走电源。 下面的组态输入是最小化组态:705-510A-110/7MR-A118-327 选择所使用探头的型号 7xR-x Model 705:7xA-x ,7xB-x ,7xD-x ,7xE-x ,7xF-F ,7xF-P ,7xF-4, 7xF-x ,7xJ-x ,7xK-x ,7xP-x ,7xR-x ,7xS-x ,7xT-x , 7x1-x ,7x2-x ,7x5-x ,7x7-x , 选择探头安装方式(NPT (螺纹),BSP (螺纹),或flange (法 兰)) NPT 选择测量液位的单位(inches ,cm ,feet 或meter )。 cm 输入探头铭牌上探头的确切长度。327 ⑤输入液位偏移量。 根据实际水位对准 ⑥对象的介电常数范围。(选项有1.4-1.7;1.7-3;3-10;10-100) (水的介电常数一般在80,所以选择10~100) ⑦ 输入4mA 对应的液位值(0%点)。 0cm ⑧ 输入20mA 对应的液位值(100%点)。 300cm ⑨ 选择阈值类型。(选项有CFD 或Fixed ) CFD
FMP5x的调试和抑制 1、接线 FMP5X导波雷达是两线制仪表,端子设计使得接线非常便捷 端子旁有“+”“—”标识; 接线拆线时只需要用一字螺丝刀“压下中间凹槽”即可 2、原理:时间行程原理
导波雷达与普通雷达共性和区别: a、导波雷达和喇叭口雷达原理是一样的,导波雷达相当于喇叭口雷 达增加了一个探杆(或缆绳) b、导波雷达优点:由于雷达波能量集中在探杆周围,可以测量介 电常数更低的介质,比如润滑油 c、导波雷达缺点:导波雷达是与被测介质接触的测量方式,首先要 考虑到探杆是否会被介质腐蚀,其次被测介质不能有黏附性,探杆上的黏附物会带来假信号 d、导波雷达测量范围限制:导波雷达的测量范围限于所选探杆或 缆绳的长度
LN 探杆长度 L (level)液位值 雷达液位计发射雷达波,雷达波被液面反射,雷达液位计接收被反射的雷达波,来回时间为t,雷达波速度为c D=C*t/2 L=E-D D(Distance):法兰下沿到液面的距离,直接测量值 E(Empty):空标,法兰下沿到探杆底部(或探杆底部上方某一位置)的距离,即零点,0%(4mA)对应值,需要设置 F(Full):满标,即量程,需要设置。 L(Level):液位,L值是通过L=E-D计算出的,E值设置的正确性与
L值密切相关。 通常:空标E值小于等于杆长度LN,满标F值小于等于空标E值 3、调试 按键说明: 共有-、+、E键 ●+或者-修改参数值 ●E键用于参数确认 ●同时按+和-可以返回到上一层菜单 FMP5X已经支持中文界面 Setup(“设置”)下参数 空标:输入空标值 满标:输入满标值 Advanced setup (高级设置) :输入密码0000 “物位”下 参数medium property (介质性质) 选择介电常数,比如润滑油1.6~1.9,水大于10 参数level unit(物位单位) 选择单位,比如:米(默认是%)
在实际运用中,雷达液位计有两种方式即调频连续波式和脉冲波式。采用调频连续波技术的液位计,功耗大,须采用四线制,电子电路复杂。而采用雷达脉冲波技术的液位计,功耗低,可用二线制的24V DC供电,轻易实现本质安全,精确度高,合用范围更广。 雷达液位计记实脉冲波经历的时间,而电磁波的传输速度为常数,则可算出液面到雷达天线的间隔,从而知道液面的液位。 T——电磁波运行时间 C——光速 式中 D——雷达液位计到液面的间隔 D=CT/2 雷达液位计采用发射—反射—接收的工作模式。雷达液位计的天线发射出电磁波,这些波经被测对象表面反射后,再被天线接收,电磁波从发射到接收的时间与到液面的间隔成正比,关系式如下: 超声波有盲区,安装时必需计算预留出传感器安装位置与丈量液体之间的间隔。 由超声波在介质中传播原理可知,若介质压力、温度、密度、湿度等前提一定,则超声波在该介质中传播速度是一个常数。因此,当测出超声波由发射到碰到液面反射被接收所需要的时间,则可换算出超声波通过的路程,即得到了液位的数据。 在超声波检测技术中,无论那种超声波仪器,都必需把电能转换超声波发射出去,再接收归来变换成电信号,完成这项功能的装置就叫超声波换能器,也称探头。如图所示,将超声波换能器置于被测液体上方,向下发射超声波,超声波穿过空气介质,在碰到水面时被反射归来,又被换能器所接收并转换为电信号,电子检测部门检测到这一信号后将其变成液位信号进行显示并输出。 我们一般把声波频率超过20kHz的声波称为超声波,超声波是机械波的一种,等于机械振动在弹性介质中的一种传播过程,它的特征是频率高、波是非、绕射现象小,另外方向性好,能够成为射线而定向传播。超声波在液体、固体中衰减很小,因而穿透能力强,尤其是在对光不透明的固体中,超声波可穿透几十米的长度,遇到杂质或界面就会有明显的反射,超声波丈量物位就是利用了它的这一特征。 主要应用场合的区别: 1.超声波不能应用于真空、蒸汽含量过高或液面有泡沫等工况。 2.用雷达的时候要考虑介质的介电常数。 3.雷达相对价位较高。 4.超声波精度不如雷达。
第一章综述 Eclipse开放工程是IBM集成开发工具,其强大完善的功能、开放的架构可以 适应各种级别的java开发。 Eclipse本身不集成有ClearCase ,需要添加插件才能集成。 第二章安装 Eclipse若要与CC集成,则需将ClearCase插件添加到Eclipse安装目录下的plugins文件里,如下所示: 配置结束后打开Eclipse,则在Eclipse的界面上显示ClearCase菜单项,如下图 所示:
第三章集成后的日常使用 3.1 创建工作区和共享文件夹 建立一个共享文件夹,用以存放视图信息(如:ccview_stg); 建立一个存放程序的文件夹(如:dzsbvob),该文件夹是用以存放从服务器上load下来的元素。 Eclipse的工作区(如:dzsb_work),该工作区用以存放Eclipse的相关信息;如下:
3.2 连接ClearCase Rational ClearCase 允许联机或脱机工作。如果决定访问 ClearCase 服务器,则必须与其连接。这里是必需的基本步骤。请注意,通常只需要连 接一次以启动任务的活动 要在Eclipse中连接到Rational ClearCase,请选择ClearCase→connect to Rational ClearCase菜单选项或单击ClearCase连接图标。当连接成功后,ClearCase里的菜单选项被激活。如下: 3.3 ClearCase创建视图 打开Project Explorer 控制台,如下:
在选择项目开发流(dzsb_dve_ks),右击→Create View,如下: 单击此菜单;
导波雷达液位计的分析与应用 管晓春 关键词:导波雷达(Guided Wave Rada )、时域反射(TIME DO MAIN REFECTORY )、等时采样(EQUALITY TIME SAMPLE)摘要:导波雷达测液位技术是一种先进的液位测量技术,与传统液位测量技术相比,它不受介质比重的影响,也不受介质介电常数变化的影响。它的这些明显的优点及性能越来越引起广大技术人员的注意。 随着导波雷达技术的不断进步和制作工艺的逐渐成熟,越来越多的导波雷达仪表应用在石油工业生产测量的各个部位。从污油池到油罐到汽包的液位测量,随处可见导波雷达仪表的身影。 导波雷达技术由TDR (时域反射原理)技术,ETS(等时采样)原理和最新超高速计时电路组成,是三者的完美结合。首先由TDR发生器产生一个沿导波杆传送的电磁脉冲波,当遇到比先前传导介质(空气或蒸汽)介电常数大的液体表面时,脉冲波会被反射。由ETS和超高速计时电路组成的接受部分通过计算脉冲波的传导时间来达到精确的液位测量。 导波雷达液位计与浮筒变送器比较,它不受介质比重的影响。与射频导纳相比,它不受介电常数变化的影响。不需在厂的调校,也不需现场调校,只需输入液位数据即可进行组态,这些都是其它液位变送器不可比拟的优点。 但是导波雷达液位计也有其局限性,应该根据不同工况来选择合适的型号和安装方式,以下是我们在实际应用中遇到的一些问题。 一、延迟焦化装置冷焦水池的液位测量。该液位测量使用丹东通博
电器的GWLF-7XA型标准同轴式探头。开工初期,该表工作稳定,指示准确,经过一段时间的运行,这块表出现以下故障:实际液位低时指示恒定在75%;而液位高于75%后,此表指示准确。将导波杆从池中抽出检查,发现内杆与套管间杆长的75%处有焦粉结垢。最后查说明书得知,此型号的探头应该用在干净的低粘度液体中。由于冷焦池的水循环使用后含有大量的焦粉,长时间慢慢在导波内杆上结垢,故形成上述故障,因此不再使用此表。同样工况下,测量切焦沉池液位的导波雷达由于采用VECA的柔性单相式探头而一直工作正常。这说明仪表的选型要充分考虑工况的变化。 二、锻烧焦装置汽包液位的测量。该液位测量使用的Magnetrol公司的705型标准同轴探头。开工初期该表工作一直不稳定,波动幅度特别大,通过调导波雷达参数及阻尼都没有效果。最后到现场仔细观察,发现问题出在安装上:(1)导波雷达安装在汽包的中部,引压口处于发汽排管上部,工艺本身波动大;(2)引压管线采用的DN15的钢管过细,说明书规定引压管公称直径应为40mm。问题找到后,在装置检修时将表移位,移到汽包侧面,同时更换为DN40的引压管。经过改动,汽包投用后仪表指示正常。这说明仪表的安装位置和引压管线对导波雷达准确测量有多么重要。 通过实际使用,我认为导波雷达液位计工作性能还是很稳定的,维护量也很小,只要我们根据要求选择合适的的型号,正确的安装,导波雷达就会发挥更大的作用。
MT2000导波雷达液位变送器安装调试操作手册
1) 存储须知: 如有必要需在安装前予以保存,请将其保存在室内常温的条件下,不要超过以下范围: 温度范围:-40℃~65.5℃ 湿度:0 ~100%R.H. 无冷凝 2) 产品简介及工作原理: MT2000是4~20mA回路供电采用微处理器的智能物位变送器,可提供HART或Honeywell DE数字信号输出。它使用非常低的微波能量来探测被测物体的物位。为了获得最好的性能,了解其工作原理是很重要的。电子变送器外壳安装在一个特殊的连接器上配合过程连接,并且密封,同时带一个硬杆或电缆。这个形如探杆的硬杆或电缆悬挂在容器中,起一个导波的作用,也就是说微波能量集中在探杆中,并沿着探杆传递,从而替代没有探杆的锥形散射。 一个测量周期由以下几步组成: 1、电子变送器产生一个非常短的微波能量脉冲,沿着探杆传递。 2、脉冲沿着探杆传递,直到它遇到一个不连续的,突然的介电常数的变化,像物位面, 能量被反射回来并沿着导波管传递到电子变送器。 3、当反射脉冲到达电子变送器时,被其检测到。通过测量消逝的时间从起始脉冲到反馈 脉冲,电子变送器可以计算出待测的物位。 4、由于微波以光速传递,一个完整的测量周期是由几千个脉冲组成。电子部件使用采样 技术来重建复制一个实际时间信号波形,但以低得多的速度,以便微处理器能够处理。 这个过程类似如频闪观测仪的效果,当用频闪灯光来观察高速运转的机器时候。 5、测量周期是每秒10次,同时,在产生当前的输出信号(正比于待测的物位)以前, 使用独特的滤波技术进行处理,保证信号的精度。 探测信号过程如下: 1、起始脉冲 2、不连续反射 3、从物位返回来的信号 4、从探杆末端返回来的信号 测量原理本质上基于这样一个事实:介电常数的突变将产生一个在基线下有一定振幅的负脉冲。介电常数变化越大,反馈回来的信号的幅度也越大。这意味着如果存在一个实质性的变化,如从管嘴的直径到一个敞开的容器,例如下图所示过程连接的曲线图。在正确配置MT2000工作时,需要考虑这个事实(参考试运行一节)。 以下是几个缩写字母的含义: G S 增益BLK 盲区 THV 限值电压URV 范围高值 LRV 范围低值LL1 液位1 L 1 探头顶部非测量区域L 2 探头地步非测量区域 下页图是回波信号示意图,我们可以在示波器上看到以下图示情形。
导波雷达的用途和原理 原理: 导波雷达液位计是依据时域反射原理(TDR)为基础的雷达液位计,雷达液位计的电磁脉冲以光速沿钢缆或探棒传播,当遇到被测介质表面时,雷达液位计的部分脉冲被反射形成回波并沿相同路径返回到脉冲发射装置,发射装置与被测介质表面的距离同脉冲在其间的传播时间成正比,经计算得出液位高度。 优势: 导波雷达液位计的技术优势:雷达液位计对液体、颗粒及浆料连续物位测量。雷达液位计的测量不受介质变化、温度变化、惰性气体及蒸汽、粉尘、泡沫等的影响。雷达液位计的精度为5mm,量程60米,耐250度高温、40公斤高压,雷达液位计适用于爆炸危险区域。 用途: 导波雷达液位计应用于水液储罐、酸碱储罐、浆料储罐、固体颗粒、小型储油罐。各类导电、非导电介质、腐蚀性介质。如煤仓、灰仓、油罐、酸罐等。 普通雷达为非接触式测量,导波雷达为接触式测量,这样就意味导波雷达更需考虑介质的腐蚀性和粘附性,而且过长的导波雷达安装和维护更加困难。普通雷达可以互换使用,而导波雷达由于导波杆(缆)长度根据原工况固定,一般不能互换使用,受此影响导波雷达的选型要比普通雷达麻烦。测量固体物料时,导波雷达还要考虑导波杆(缆)的受力情况,也是由于受力的原因一般用导波雷达的测量距离不会很长,而普通雷达在30、40m的罐体上应用比较常见,甚至可测到60m。 不过在一些特殊工况导波雷达有明显的优势,如罐内有搅拌,介质波动大,这样的工况用底部固定的导波雷达测量值要比变通雷达稳定;还有小罐体内的物位测量,由于安装测量空间小(或罐内干扰物较多),一般普通雷达不适用,这时导波雷达的优势就显现出来了;再有是低介电常数的工况,无论雷达还是导波雷达测量原理都是基于介质介电常数差别,由于普通雷达的发射的波是发散的,当介质介电常数过低时,信号太弱测量不稳定,而导波雷达波是沿导波杆传播信号相对稳定,另外一般的导波雷达还有底部探测功能,可以根据底部回波信号能测量值加以修正,使信号更为稳定准确。 主要是原理和结构不同,导波雷达物位计是基于时间行程原理的测量仪表,雷达波以光速运行,运行时间可以通过电子部件被转换成物位信号。智能雷达物位计采用高频波脉冲通过天线系统发射并接收,雷达波以光速运行,运行时间可以通过电子部件被转换成物位信号。
Magnetrol 导波雷达液位计调试步骤 1 键区有三个键用于滚动显示和校准变送器。上下键( )和回车键( )。 变送器表头示意图 2 组态问题 对Eclipse 变送器组态需要一些关键的参数。在开始组态前首先填写下列运行参 数表。
3 快速组态 Eclipse变送器出厂时均设为默认值可在现场重新组态。下面给出了最小化的组态说明。 1、变送器供电。 显示器上每隔5秒交替显示四个值:Status(状态)、Level(高度)、%Output (输出%)和Loop current(回路电流)。 2、移走底部电子隔间的盖。 3、使用上下键()从组态程序的一个步骤转到另一个步骤。 4、按回车键(一个惊叹号(!)。 5、)来增加或减少显示值或滚读选项。 6、按回车键()确认设定值并移动到组态程序的下一步。 7、输入最后一个值10秒后从变送器移走电源。
下面的组态输入是最小化组态:705-510A-110/7MR-A118-327 7xR-x Model 705:7xA-x ,7xB-x ,7xD-x ,7xE-x ,7xF-F ,7xF-P , 7xF-4, 7xF-x ,7xJ-x ,7xK-x ,7xP-x ,7xR-x ,7xS-x ,7xT-x , 7x1-x ,7x2-x ,7x5-x ,7x7-x , ② 选择探头安装方式(NPT (螺纹),BSP (螺纹),或flange (法 兰)) NPT 选择测量液位的单位(inches ,cm ,feet 或meter )。 cm 输入探头铭牌上探头的确切长度。327 输入液位偏移量。 根据实际水位对准 对象的介电常数范围。(选项有1.4-1.7;1.7-3;3-10;10-100) (水的介电常数一般在80,所以选择10~ 100) 输入4mA 对应的液位值(0%点)。 0cm ⑧ 输入20mA 对应的液位值(100%点)。 300cm
目录 摘要:............................................ 错误!未定义书签。Abstract ........................................... 错误!未定义书签。第一章绪论 ..................................... 错误!未定义书签。 引言.......................................... 错误!未定义书签。 超声波测距原理以及理论分析.................... 错误!未定义书签。第二章系统概述 ................................... 错误!未定义书签。 方案选择...................................... 错误!未定义书签。 方案一 .................................... 错误!未定义书签。 方案二 .................................... 错误!未定义书签。 系统设计原理.................................. 错误!未定义书签。 系统组成...................................... 错误!未定义书签。 主控制器 .................................. 错误!未定义书签。 显示电路 .................................. 错误!未定义书签。 HC-SR04超声波模块......................... 错误!未定义书签。第3章系统硬件设计 ............................... 错误!未定义书签。 主控芯片STC89C51 ............................. 错误!未定义书签。 单片机特点: .............................. 错误!未定义书签。 内部结构 .................................. 错误!未定义书签。 引脚图以及部分引脚功能 .................... 错误!未定义书签。 液晶显示模块.................................. 错误!未定义书签。 模块简介: ................................ 错误!未定义书签。 引脚功能说明: ............................ 错误!未定义书签。 系统显示模块电路 .......................... 错误!未定义书签。 超声波测距模块................................ 错误!未定义书签。 模块简介 .................................. 错误!未定义书签。 模块工作原理: ............................ 错误!未定义书签。 模块电气参数 .............................. 错误!未定义书签。 系统超声波模块电路 ........................ 错误!未定义书签。 报警电路模块.................................. 错误!未定义书签。 蜂蜜器简介 ................................ 错误!未定义书签。 系统报警电路模块 .......................... 错误!未定义书签。第四章系统软件设计 ............................... 错误!未定义书签。 主程序设计.................................... 错误!未定义书签。 主程序简介 ................................ 错误!未定义书签。 程序代码 .................................. 错误!未定义书签。 LCD显示模块程序设计 .......................... 错误!未定义书签。 模块简介 .................................. 错误!未定义书签。 程序代码 .................................. 错误!未定义书签。 超声波测距模块程序设计........................ 错误!未定义书签。 模块简介 .................................. 错误!未定义书签。 模块代码 .................................. 错误!未定义书签。