
研躺匀智能倒车系统中方向盘转角精确控制的实现研究
彭翠云,赵广耀
(东北大学机械工程与自动化学院,辽宁沈阳110004)
l引言
随着我国汽车产业的发展和人们生活水平的不断提高,一方面汽车的数量逐年增加,公路、街道及停车场变得非常拥挤;另一方面,新司机及非专职司机越来越多,因倒车引起的纠纷也越来越多。为此,汽车智能倒车系统的研究正逐步受到人们的重视。而在智能倒车系统中,对方向盘转角的精确控制是提高整个倒车系统性能的关键之一。按照智能倒车系统的要求,在汽车倒车过程中,需转角控制无超调、响应快速且稳态误差小,而这正是本文要实现的。
2系统原理
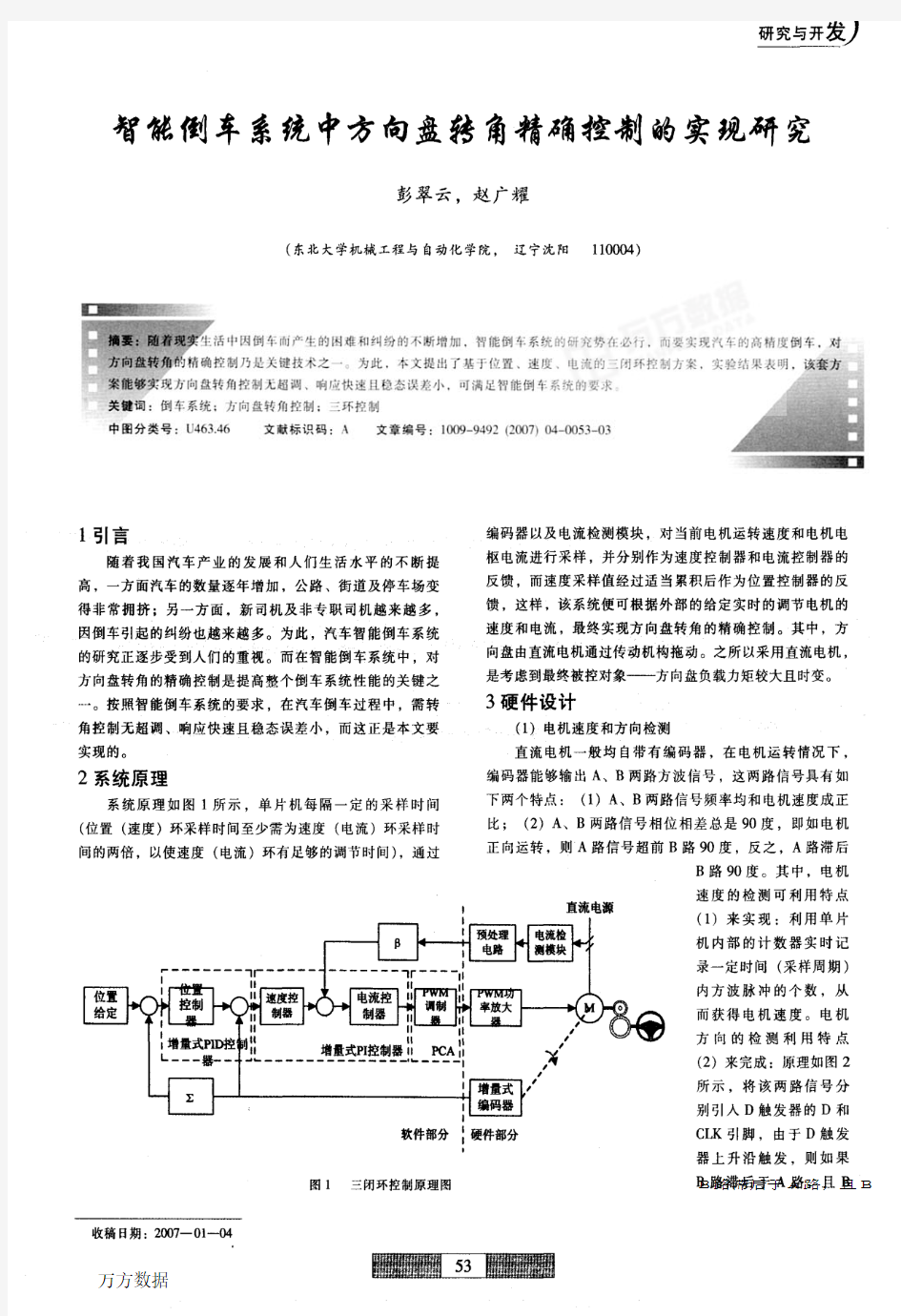
系统原理如图1所示,单片机每隔一定的采样时间(位置(速度)环采样时间至少需为速度(电流)环采样时间的两倍,以使速度(电流)环有足够的调节时间),通过编码器以及电流检测模块,对当前电机运转速度和电机电枢电流进行采样,并分别作为速度控制器和电流控制器的反馈,而速度采样值经过适当累积后作为位置控制器的反馈,这样,该系统便可根据外部的给定实时的调节电机的速度和电流,最终实现方向盘转角的精确控制。其中,方向盘由直流电机通过传动机构拖动。之所以采用直流电机,是考虑到最终被控对象——方向盘负载力矩较大且时变。
3硬件设计
q)电机速度和方向检测
直流电机一般均自带有编码器,在电机运转情况下,编码器能够输出A、B两路方波信号,这两路信号具有如下两个特点:(1)A、B两路信号频率均和电机速度成正比;(2)A、B两路信号相位相差总是90度,即如电机正向运转,则A路信号超前B路90度,反之,A路滞后
直流电源
收稿日期:2007一Ol—04
软件部分:硬件部分
●
图1三闭环控制原理图
B路90度。其中,电机
速度的检测可利用特点
(1)来实现:利用单片
机内部的计数器实时记
录一定时间(采样周期)
内方波脉冲的个数,从
而获得电机速度。电机
方向的检测利用特点
(2)来完成:原理如图2
所示,将该两路信号分
别引入D触发器的D和
CLK引脚,由于D触发
器上升沿触发,则如果
B路滞后于A路,且B
与开发
路作为D触发器的CLK端,那么D触发器的Q端必输出高电乎,反之,则输出低电平,利用该电平即可判别电机旋转方向。
A
B
Q
高电平触发
高电平图2电机运行方向检测原理图
(2)电机电流检测
采用霍尔效应传感器测量电机电枢电流是目前最为理想的一种方法,其优点在于:不会引入额外负载;可测量任意波形的电流信号,无时延,且精度较高。本系统采用霍尔效应传感器NT一5作为电枢电流的检测芯片,其原理如图3所示。由于电流信号的脉动性,且方向时变,所以被检测出的电流信号(一定比例的电压信号)在进人单片机之前尚应进行滤波、偏置等预处理以减缓信号的脉动且消除由于电流反向而引入的负电压信号,使信号便于单片机处理。电机电流检测原理如图4所示。
(3)直流电机驱动
本设计采用功率放大器件SA60[13作为直流电机驱动
M
图3NT一5原理框图
嚣溅;批。糕‰
(电流正向,则M,,:二2=。、
》o,反之则i《o)ll”””一””7
Nr.5信号放大
112气ll+_U
(U为偏置电
压量,U砌
信号偏置
鬟位’>鬟
1120S记鲻
0以<O
信号限幅
图4电机电流检测
照
片
机
~ID
器,电压调节方式为脉宽调制(PWM)方式,控制原理如
图5所示,直流电机的脉宽调制信号由单片机内部的PCA
模块生成Ⅲ,再经SA60放大之后产生最终的直流电机的
控制电压,加至直流电机两端。在功率放大器与直流电机
之间一般需添加低通滤波电路,以最大限度的降低电枢电
流脉动,实现电机平滑运转。加至直流电机两端的电压幅
值可由下式计算:
玑=一生一×24=24d
}l+£2
U≥—旦一×24=24(1一仅)
fI+£2
贝4乩≈=—:1二}×24=24(2d一1)(】)
fl+f,
其中0【为PCA模块输出信号占空比,亦即SA60A端
输出信号的占空比,而t。、£:则分别为该输出方波信号在
一周期内的高电平和低电平维持时间,如图5所示。
占空比可调
图5PWM调速原理图
B
A
4软件设计
数字控制器采用增量式PID控制器进行设计,流程如
图6所示。
增量式PID控制器是位置式PID控制器的改进,而位
置式PID控制器是以连续系统的PID控制规律为基础的,
并将其数字化而得到,写成差分方程。PID调节器的微分
方程[3]:
“㈤=¨∞)+寺f∞)叭%‰}](2)
式中u(t)——PID调节器的输出量;
e(#)——PID调节器的输入量;
矗。——比例系数;
兀——积分时间常数;
乃一微分时问常数。
图6控制器流程图
在单片机控制系统中,使用数字PID,因此需将式(2)离散化,令
u(£)一u(^);
e(t)一e(.|});
卜㈤脚扣,;
生蛐:!(墨2二!!墨二!!
出r
其中T为采样周期,必须足够短,才能保证精度。则式(2)可以写成差分方程:
^
配(¨曲,(||})辄,∑e(『)“。[e(后)_e(.|}一1)](3)
j=O
甚
Ⅱ(而一1):=.j},(蠡一1)+后,2。eU)+矗。[e(||}一1)—e(七一2)](4)
』=0
式中:l|}_I=后,鲁——积分系数;
』,
%庐后,{争——微分系数。
』
由式(3)和式(4)得:
△Ⅱ(尼)=“(矗)一u(七一1)=蠡。[e(矗)一e(后一1)]+后,(七)+南D[e(矗)一2e(七一1)+e(后一2)](5)式(5)即增量式PID控制器设计依据。
5实验分析
在系统实际调试过程中,一般应自内(电流环)而外(位置环)逐步进行,首先对各环的PID参数进行整定,以期达到最优的响应结果,然后再进行多环整合,如果始终未达到期望的结果,则还应根据系统的数学模型对各环进行校正,可根据系统实际的bode曲线采用串联引前(滞后)校正,依据的原则是使系统具有最大的相位裕度,这些是自动控制领域最为经典的问题『4],在此不再叙述。实际的调试结果如图7所示。其中,由位置环曲线(图7a)可以看出,无论从超调量、上升时问等动态特性还是稳态误差等静态特性方面均具有令人满意的结果;由速度环调试曲线(图7b)可以看出,电机的恒加速度启动性能较为理想,而速度曲线在趋于
研躺匀
稳态时的一个较大波动则是由于电机电枢电流由限幅值向趋于负载电流这一过渡过程造成的;由电流环的调试曲线(图7c)可以看出,在电机启动瞬间,电枢电流则快速达到限幅值,并且基本维持不变,保证了电机的恒加速度启动,而
捌
_;譬
罂
v
砖
氅
基
斟
憾
硝
暮
脚
(a)位置环调试结果
采样时间Te3.2ms
(b)速度环调试结果
采样时间T-吣.1ms
(c)电流环调试结果
图7实际的调试结果曲线
(下转第95页)笛
加
”
m
,
o
,
∞
最薄处厚度为1.595mm。凸缘部分厚度与上道冲压工序的半成品相比,基本没有变化。
②第三次冲压(反拉深)后,再拉成形仍然处于安全区,可以实现拉深;在凸台顶部的圆角处,产生了局部的变薄,最薄处厚度为1.325mm。
③第四次冲压(整形)后,整形冲压件还是处于安全区;在冲压件最小凸台底部圆角处产生了较为严重的变薄,局部厚度为1.187mm,主要原因是该处的圆角半径太小,只有0.5mm,造成了该处材料的局部变薄。
(④大圆筒完全可以安全地拉出;拉深后凸缘侧边的中部有所变厚,厚度为2.374mm。
将以上结果与产品设计人员进行商讨后,产品设计人员认为该冲压结果可以满足产品的使用要求。因此,根据模拟结果,设计了各道工序的冲压模具,经实际试验,一次获得成功。图7所示为按照该冲压工序冲压出的空调电机端盖。经测量实际冲压出的电机端盖零件,其各部位的厚度与仿真结果基本符合。
图7实际冲压出的电机端盖
4结论
通过对空调电机端盖数值模拟分析,可得到如下结论:(1)运用DYNAFORM软件数值模拟结果与实际生产结果基本吻合,说明数值模拟计算结果具有可参考性。
塑国
(2)本文采用的先冲压球面,从而由此冲出拉深件中部凸台的冲压方法,适用于中间凸台比较小,且对工件壁厚要求不高的冲压件的冲压(胀形时板料会变薄),有利于减少拉深工序,降低生产成本。将大直径筒形的拉深放在成形工序的最后,有利于减小模具体积,节约模具成本。
(3)对于多次拉深件,前后两次之间毛坯(半成品)的信息传递是关键。
(4)利用有限元方法对冲压工序进行动态仿真的技术,使模具设计的成功率大大提高,模具生产周期明显缩短,节约了生产成本。
参考文献:
[1]TaylorL,C80J,KarafiUisAP,etal.NuIneric8lsi瑚ulationofsheet—metalfonning[J].J叫mal0fM砒edalsProcessing
Techn0109y.1995(50):168—172.
[2]LWang,TCke.Nume五calsimulation0ftIleeffectsofthespace—V鲥antblaIlk—holderforceandgeometricalvariablesin
tllede印一出8wingprocess[J].StrainAnalysis.V01.40No.
4.2005:375—384.
[3]徐伟力,林忠钦,陆匠心,汪承璞.动态仿真在车身覆盖件成形中的应用[J].材料科学与工艺,2001,9(3):266—
268.
【4]韦东来,寇淑清,扬慎华.轿车覆盖件拉延动态仿真及成彤分析[J].汽车工程,2004,26(4):500.
[5]黄祥煜,昊伯杰,曾攀.薄壁紫铜零件多次拉深成形的数值模拟[J卜锻压技术,20Q5,(1):16—18.
[6]汪锐。罗亚军,郑晓丹,何丹农.复杂零件多道拉深成形的计算机仿真[J].塑性工程学报,200l,8(6):17一19.
[7]陶宏之,何丹农,彭颗红,阮雪榆等.多次拉深成形有限元建模关键技术….模具技术,1999:520.
第一作者简介:毛兰斌,男,1977年生,四川仁寿人,大学本科,助教。研究领域:机械系统的仿真及参数识别。
(编辑:向飞)
夸蟹崮匆’瞄窖宣妊夸蛞宣出童跨,忒幺窖妇窖眩窜匆夸皓忒}夸跨窖妇夸函毫留童虹窖妇穹泛逍章穹譬奄酪夸函8譬窖跨s跨窖拓q彦夸妇s皓夸澎(上接第55页)
在电机速度逐步趋于稳定时,电枢电流则同时逐步趋于负载电流,但同时还可以看到,在电枢电流趋于负载电流直至稳定的过程中,电枢电流振荡性亦进一步加大,事实上,由于脉宽调制信号本身的振荡性,加之,电机自身以及滤波电路等阻抗不可能设置过大,故而不可避免的会使得电枢电流振荡,问题的关键在于如何降低电枢电流振荡,而不是消除。6结论
采用位置、速度、电流三闭环控制方法对拖动方向盘的直流电机进行控制,一般情况下,只要参数设置得当,均能得到满意的效果。此外,笔者发现,在系统实际调试过程中,位置环参数设置一般较易,而电流环参数设置最难,从图7c也可看出,电流相应曲线并非非常理想,其原因涉及采样时间、滤波时间常数、电流采样方式的选择以及电流限幅值的设定等诸多方面。如何更合理的设置电流环参数或者说改进电流环结构,笔者认为是值得探讨的。
参考文献:
[1]SA60dat髂heet[Z].Arizona,USA:ApexMicrotechnologyCorp.,2002.
[2]C805lF'060datasheet[Z].Austin,USA:SiliconLabomtodes,inc..2004.
[3]张国范,顾树生.微型计算机控制技术[M].沈阳:东北大学出版社,2002.
[4]刘建昌.自动控制系统[M].北京:冶金工业出版社,2001.
第一作者简介:彭翠云,女,1979年生,湖北荆门人,硕士研究生。研究领域:汽车倒车辅助系统。
(编辑:粱
玉)
实验三 伺服电机转角的运动控制 1 实验目的: 1)了解反馈控制系统的组成; 2)了解PID(比例-积分-微分)控制器参数对系统性能的影响; 3)熟悉 SIMULINK 的基本操作。 2 实验装置:主计算机、从计算机、小车运动控制装置、互联网 3 实验内容及步骤: 本实验要求构建反馈控制系统,计算或调节PID 控制器参数,使电机快速准确地运动到某个位置。 步骤如下: 第一步: SIMULINK 仿真. 如图1所示. 已知电机转动惯量 J=0.0031, 转动摩擦系数 B=0.1934, 要求设计PD 控制器, 使系统的固有频率=125 rad/s, 阻尼比=1. 求参数Kp, Kd 。这一工作要求在实验之前完成。 求出参数Kp, Kd 后, 在Matlab 命令窗口中输入: J=0.0031, B=0.1934以及Kp 和Ki. 进入Simulink, 打开模板文件simu.mdl, 将其连线成如图 2. 图2 仿真程序框图 执行仿真. 观察输出波形. 第二步:电机转角实时控制. 打开文件MyExp.mdl. 连线构建如图3的实时控制程序框图。其中模块PCI-6024输出控制电压,连接至电机的驱动器,用于驱动电机转动;模块PCI-6601输入脉冲信号,连接至电机的转角编码器,用于测量电机转角。运行该程序将使电机转动90度。 1)双击PID模块,先随意设置PID参数Kp,Ki和Kd. 2)通知指导教师,让其帮助做好主从机连接设置及获得下载许可等。 3)按ctrl+B编译程序将其下载到从计算机中。 等到显示:###Successful completion of xPC Target build procedure for model: MyExp 图1 电机转角PD(比例-微分)控制系统
Computer Science and Application 计算机科学与应用, 2019, 9(6), 1216-1222 Published Online June 2019 in Hans. https://www.doczj.com/doc/4415867143.html,/journal/csa https://https://www.doczj.com/doc/4415867143.html,/10.12677/csa.2019.96136 Research on Intelligent Wheelchair Control System Tianping Zhang1,2, Yijian Gong1 1School of Information Engineering, Wuchang Institute of Technology, Wuhan Hubei 2School of Logistics Engineering, Wuhan University of Technology, Wuhan Hubei Received: Jun. 10th, 2019; accepted: Jun. 21st, 2019; published: Jun. 28th, 2019 Abstract Wheelchairs, as an important means of transportation, play an important role in daily life for people with mobility disabilities, including the elderly or the disabled. How to design a better in-telligent wheelchair, effective wheelchair control scheme and interactive operation mode is of great significance to provide more efficient and safer travel services for people with mobility dis-abilities. This paper studies the wheelchair control structure, wheelchair control mode, wheel-chair status monitoring, and provides an effective basis for caring for the elderly. Keywords Intelligent Control, Intelligent Alarm, Safety Monitoring 智能轮椅控制系统研究 张天平1,2,龚义建1 1武昌工学院信息工程学院,湖北武汉 2武汉理工大学物流工程学院,湖北武汉 收稿日期:2019年6月10日;录用日期:2019年6月21日;发布日期:2019年6月28日 摘要 对于包括老年人或者残疾人在内的行动不便人群,轮椅作为重要代步工具,在日常生活中扮演着重要的角色。如何设计出更好的智能轮椅,以及有效的轮椅控制方案和交互操作方式,为行动不便人群提供更加高效、更加安全的出行服务具有十分重要的意义。本文研究了轮椅控制结构、轮椅控制模式、轮椅状
自动控制原理与系统课程实训电压一转角机电伺服控制系统的分析 学院(系)_______________________ 专业_____________________ 姓名_____________________ 学号
一、课题简介 二、控制系统的组成与工作原理 三、课程实训的任务与要求 四、控制系统数学建模 五、数学模型的仿真 六、控制系统的性能分析 七、心得体会 八、参考资料
一、课题简介电压—转角伺服控制系统是一类小功率位置随动实验装置,在高校和科研院、所的自动化实验室中可以看到它们的应用。利用这套设备不仅可以完成一些验证性实验(需要设置必要的外部接口和测试孔),例如位置伺服实验、直流电机调速实验、运算放大器性能实验、PID 校正实验和功率放大器性能实验;也可以做一些设计性、研究性的实验,比如将其与计算机接口,从而对一些控制方法进行研究。这类实验设备有多种成型产品,被普遍用于教学和科研。 机电伺服系统主要用于小功率伺服控制。驱动负载能力和响应速度偏低是这类控制方式的缺点。但在信号检测、传递、处理以及新控制策略再生等方面表现的灵活性、准确性、和经济性是其它控制方式所不能比拟的。
二、控制系统的组成与工作原理 电压—转角机电伺服控制系统的电气原理如图所示。该系统的输入量是给定的电压信号U i ,输出量是直流伺服电动机SYL — 5的转角a。运算放大器卩A741构成控制系统中的 PI 校正环节,可以增大系统的开环增益,从而提高系统的稳定精度。功率放大器由前置放大器 MC1536 和三级互补跟随器组成,具有较高的输入阻抗。系统中除了设置位置反馈外还设置了速度反馈,用来增加系统阻尼,减小伺服电机的时间常数,改善传递特性的线性度。从而进一步提高系统的动、静态品质。被控对象是直流伺服电机,它与反馈电位计和测速发电机同轴相连。该系统具有输出转角跟随输入电压变化的功能:当输入信号与位置反馈信号出现差值时,位置偏差信号经 PI 校正环节后与速度反馈信号比较,得到的速度偏差经功率放大后驱动直流伺服电机旋转,同时带动位置反馈电位计和测速发动机一起转动。最终消除偏差,伺服电机停止在与输入信号相应的位置上。位置反馈和速度反馈分别由电位计 WH— 1.5k、测速发电机 70CYD-1 和速度反馈分压电位计完成。由于反馈元件的精度对闭环控制系统的性能有着重要影响,应该选用性能稳定、精度高的元、器件作为反馈元件。
抽油机采油系统智能化节能控制技术应用研究 抽油机是目前我国油田开采的主要方式,具有结构简单、耐久性好等优点,得到很大程度的应用。由于其效率低和能耗高,严重影响着油田企业的经济效益。开展抽油机采油系统节能控制研究对于提升油田企业经济效益具有重要的影响意义。 标签:抽油机;采油系统节能;智能优化 1 引言 目前,我国油田的开采以机械采油方式为主,机械采油又分为三种类型:抽油机采油、螺杆泵采油和电泵采油。三种机械采油应用中,抽油机采油应用最为广泛,是重要的采油装备。抽油机应用中,传统游梁式抽油机使用量最大,其开采油量约占机械采油总量的80%-90%左右,这种抽油机具有结构簡单、便于加工、耐久性好等优点,但一般能耗比较高,采油效率比较低。据统计,抽油机的能耗成本约占整个采油成本的40%,可见其量之大。因此,对于抽油机采油进行节能控制研究对于采油成本的控制,提升采油经济性具有重要作用。 2 抽油机采油系统智能化节能控制技术研究的意义 我国油田开采中,绝大情况下都是使用传统的游梁式抽油机进行采油,这种抽油机耗能在整个采油耗能中占比较大。其耗电量约占整个油田耗电量的30-40%,为油田开采的第二耗能装置,仅次于注水操作。因此,开展节能控制对提升经济效益具有决定性意义。 由于传统的抽油机效率低、耗能大等缺点,新型的抽油机不断研究和出现,如国产数控抽油机、链条式抽油机、液压抽油机等等,虽然这些新型的抽油机耗能相对较低,但制造成本和维护成本相对较高,并且其耐久性没有传统游梁式抽油机好,因此其应用受到限制。因此,研究低成本的新型抽油机和降低现有抽油机的耗能、节能等工作对于提升油田企业的经济效益具有重要意义,同时更加有利于推动国家节能减排要求的实施。 3 抽油机能耗大的原因及解决方案 3.1 抽油机能耗大的原因 ①由于曲柄配重形成了几何偏心,导致其惯性力比较大,因此其运行或者运动的起始阶段需要配备大容量的电机来完成,而在真正的运行过程中,又会导致大马拉小车的局面,使得无功损耗增加。②由于不同的曲柄角度的平衡效果是不一样的,平衡效果越差,其能耗越高。在其转动过程中,平衡效果较差。③抽油杆下落时所释放的机械能除了转化为平衡重的位能,还有部分能量通过电机的再生发电转化为电能,而产生的电能也不能完全的并入电网,导致能量的损失,造
灯光控制系统方案
一、系统概述 系统原理概述 系统所有的单元器件(除电源外)均内置微处理器和存储单元,由一对信号线(UTP5)连接成网络。每个单元均设置唯一的单元地址并用软件设定其功能,通过输出单元控制各回路负载。输入单元通过群组地址和输出组件建立对应联系。当有输入时,输入单元将其转变为数字信号在系统总线上广播,所有的输出单元接收并做出判断,控制相应回路输出。 系统通过两根总线连接成网络。总线上不仅为每个组件提供24伏直流电源,还加载了控制信号。通过系统编程使控制开关与输出回路建立逻辑对应关系。 系统元件采用 模块化结构、并已 经有系统化产品、 系统扩展方便。同 时,通过专用接口 元件及软件,可能 直截接入电脑进行实时监控,或接入以太网进行远程实时监控。因此在设计时更加简单、灵活。 系统为分布式控制,模块化结构,可靠性高。任何控制模块均内置CPU,每个输入模块(场景开关、多键开关、红外传感器等)都可直接与输出模块(调光器、输出继电器)通讯(发送指令→接受指令→执行指令),避免了集中式结构中央CPU一旦出现故障造成整个系统瘫痪的弱点。 与BA系统的集成
诺雅照明控制系统是一个开放的系统,通过专用接口软件,可方便地与其他系统连接,如楼宇自控系统、门禁系统、保安监控系统、消防系统等。
系统结构图
二、系统功能和优点 智能照明控制系统在学校应用的功能和优点: 1、实现照明控制智能化 可用手动控制面板,根据一天中的不同时间,不同用途精心地进行灯光的场景预设置,使用时只需调用预先设置好的最佳灯光场景,使人产生新颖的视觉效果。随意改变各区域的光照度。 2、美化环境以达到吸引学生的注意力 好的灯光设计,能营造出一种温馨、舒适的环境,增添其艺术的魅力。良好的环境可以培养学生对其产生更大的兴趣,从而得到更好的学习效果。 利用灯光的颜色、投射方式和不同明暗亮度可创造出立体感、层次感,不同色彩的环境气氛,不仅使学生有个很好的学习环境,而且还可以产生一种艺术欣赏感,对课程产生强烈的研究精神。 3、可观的节能效果 由于智能照明控制系统能够通过合理的管理,根据不同日期、不同时间按照各个功能区域的运行情况预先进行光照度的设置,不需要照明的时候,保证将灯关掉;在大多数情况下很多区域其实不需要把灯全部打开或开到最亮,智能照明控制系统能用最经济的能耗提供最舒适的照明;系统能保证只有当必需的时候才把灯点亮,或达到所要求的亮度,从而大大降低了学校的能耗。 4、延长灯具寿命 灯具损坏的致命原因是电压过高。灯具的工作电压越高,其寿命则成倍降低。反之,灯具工作电压降低则寿命成倍增长。因此,适当降低灯具工作电压是延长灯具寿命的有
智能交通信号灯控制系 统设计 LG GROUP system office room 【LGA16H-LGYY-LGUA8Q8-LGA162】
智能交通信号灯控制系统设计 摘要:本文对交通灯控制系统进行了研究,通过分析交通规则和交通灯的工作原理,给出了交通灯控制系统的设计方案。本系统是以89C51单片机为核心器件,采用双机容错技术,硬件实现了红绿灯显示功能、时间倒计时显示功能、左、右转提示和紧急情况发生时手动控制等功能。 关键词:交通灯;单片机;双机容错 0 引言 近年来随着机动车辆发展迅速,给城市交通带来巨大压力,城镇道路建设由于历史等各种原因相对滞后,特别是街道各十字路口,更是成为交通网中通行能力的“隘口”和交通事故的“多发源”。为保证交通安全,防止交通阻塞,使城市交通井然有序,交通信号灯在大多数城市得到了广泛应用。而且随着计算机技术、自动控制技术和人工智能技术的不断发展,城市交通的智能控制也有了良好的技术基础,使各种交通方案实现的可能性大大提高。城市交通控制系统是用于城市交通数据监测、交通信号灯控制与交通疏导的计算机综合管理系统,是现代城市交通监控指挥系统中最重要的组成部分。本文设计的交通灯管理系统在实现了现代交通灯系统的基本功能的基础上,增加了容错处理技术(双机容错)、左右转提示和紧急情况(重要车队通过、急救车通过等)发生时手动控制等功能,增强了系统的安全性和可控性。 1 系统硬件电路的设计 该智能交通灯控制系统采用模块化设计兼用双机容错技术,以单片机89C51为控制核心,采用双机容错机制,结合通行灯输出控制显示模块、时间显示模块、手动模块以及电源、复位等功能模块。现就主要的硬件模块电路进行说明。 主控制系统 在介绍主控制系统之前,先对交通规则进行分析。设计中暂不考虑人行道和主干道差别,对一个双向六车道的十字路口进行分析,共确定了9种交通灯状态,其中状态0为系统上电初始化后的所有交通灯初试状态,为全部亮红灯,进入正常工作阶段后有8个状态,大致分为南北直行,南北左右转,东西直行,与东西左右转四个主要状态,及黄灯过渡的辅助状态。主控制器采用89C51单片机。单片机的P0口和P2口分别用于控制南北和东西的通行灯。 本文的创新之处在于采用了双机容错技术,很大程度上增强了系统的可靠性。容错技术以冗余为实质,针对错误频次较高的功能模块进行备份或者决策机制处理。但当无法查知运行系统最易出错的功能,或者系统对整体运行的可靠性要求很高时,双机容错技术则是不二选择。 双机容错从本质上讲,可以认为备置了两台结构与功能相同的控制机,一台正常工作,一台备用待命。传统的双机容错的示意图如图1所示,中U1和U2单元的软硬件结构完全相同。如有必要,在设计各单元时,通过采用自诊断技术、软件陷阱或Watch dog等系统自行恢复措施可使单元可靠性达到最大限度的提高。其关键部位为检测转换(切换)电路。 图 1 传统双机容硬件错示意图
智能鱼缸控制系统研究背景现状与发展趋势 1 研究背景 (1) 2 国内外研究现状及发展趋势 (2) 1 研究背景 随着我国经济的发展和人民生活水平的大幅度提高,人们的消费观念变化很大,消费档次与水平都在提高,人们的生活品味越来越高,环境的个性化、环保化也越来越受到人们的重视,与之相关的休闲、居家装饰等行业相应的日显蓬勃发展之势。人们开始渴望那大自然的宁静与和谐,而一个生机盎然、苍翠欲滴的鱼草水族箱不但可以给人带来无比宽松舒适的美感,更能调节居住环境,让人们感受那久违的大自然,让大自然的美景在自己的身边长存。水族行业正是在这种需求下应运而生的。 “鱼缸”又称为“水族箱”,“水族箱”一词起源于英国,沿用至今已超过了150年。当时的定义仅仅是一个养动植物的水容器,而随着科技水平的不断进步,以及人们养殖观赏鱼和种植水草的水平的不断提高,水族箱不仅被认为是一个养动植物的容器,而且被认为是自然域的一个缩影,是一相对完备的生态系统。在早期,水族箱多用于展览馆、公园等大众化的场所供大家观赏,随着生活水平的提高,科技和水族养殖业的快速发展。水族箱已成为普通家庭的室内装饰。近年来,这种以水草、金鱼为主的水族箱被称作“水中微缩的鱼草园林”,深受人们的喜爱,但由于人们缺乏养护的技艺或者是由于时间原因不能及时进行养护,往往“好景不长”,最后的结局多是“草桔鱼亡”。 在家居环境或是休闲娱乐场所都有各种各样的鱼缸,而保持一个适宜鱼类生活的环境是一件非常耗精力的工作。针对鱼类生活环境的净化和改善的设备有很多,目前市场上常用的鱼缸控制系统有:水温控制、充氧控制、过滤控制等相关系统。但是由于产品繁多,功能不统一,而且大多是非智能化的、单一的恒温控制、充氧或照明系统。如果仅仅是把多个单独的设备组成一套多功能的鱼缸控制系统,需要投入的费用较大,同时多个单一器件机械化的组装之后,也存在一定的资源浪费。这样不仅增加了成本,重复投资,影响美观,而且功能使用不灵活、不方便,整体性能也无法得到提升。 因此,根据当前市场的需求,以鱼缸中的水温、溶氧量、光照等的控制为研究对象,形成一套集多个功能为一体的控制系统。该设计不仅解决了人们在日常生活中对鱼缸的维护问题,还对利用高新技术改造原有的普通家居的发展有一定的实际意义和研究价值。
(1)当前主要应用采油系统的特点是: ①有杆泵采油系统的特点 抽油机发展时间最长,技术比较成熟,工艺配套完善,设备可靠耐用,故障率低。其缺点是抽深和排量都不如水力活塞泵和射流泵,单独排量不如电动潜油泵,柱塞泵对于出砂、高气油比、结蜡或流体中含有腐蚀性物质的井都会降低容积效率和使用寿命。抽油杆在不同程度腐蚀环境中承受着大交变载荷运行,产生腐蚀、磨损和疲劳破坏,还与油管存在偏磨,故障率升高,而且整个系统抽油时还要做举升抽油杆的无用功,由于抽油杆重量较大,因而这种抽油方式的效率比较低下。 地面驱动螺杆泵采油系统优点是地面设备体积小,对砂、气不敏感,能适应高气油比、出砂井,对高粘度的井也能适应。缺点是抽油杆存在管杆偏磨问题和脱扣问题,而且抽油杆限制了系统在定向井、水平井等特殊井的应用。螺杆泵的定子容易损坏,增加了检泵费用。定子橡胶不适合在注入蒸汽井中应用。螺杆泵的加工和装配要求较高,泵的性能对液体的粘度变化比较敏感。 ②无杆泵采油系统的特点 电动潜油泵采油方式具有井下工作寿命长、排量大、井上装置容易、管理方便、经济效益明显等优点,缺点是潜油电泵下入深度受电机额定功率、套管尺寸和井底温度所限制,特别是大型高功率潜油电机的使用寿命会由于井孔没有足够的环形空间冷却而大大缩短。而且多级大功率潜油电泵比较昂贵,使得初期投资比较高,特别是电缆的费用较高。由于整套装置都安装在井下,一旦出现故障,需要起出全部管柱进行修理,导致作业费用增加和停产时间过长。井下高温容易使电缆出现故障,高温、腐蚀和磨损可能造成电机损害。高气油比会使举升效率降低,而且会因气锁使潜油电泵发生故障。 潜油螺杆泵采油的最大特点是螺杆泵和潜油电机都处于井下,因而不需要抽油杆传递动力,特别适合于深井、斜井和水平井采油作业,具有很多优势,但也存在一些不足。螺杆泵的缺陷与地面驱动螺杆泵系统相同,缩短了检泵周期。采用减速传动装置的潜油螺杆泵系统,减速装置也影响了系统的效率和可靠性。 水力活塞泵其优点是扬程范围较大,起下泵操作简单。可用于斜井、定向井和稠油井采油。缺点是地面泵站设备多、规模大,动力液计量误差未能完全解决。
智能家居控制系统的研究与分析 摘要:智能家居可以定义为某个目标或系统。利用先进的计算机,网络通信, 自动控制等技术,与家庭生活相关的各种应用子系统有机地结合在一起,通过综 合管理使家庭生活更加舒适,安全,有效,节能。智能家居相较于普通家庭,除 了具备传统的生活要求功能,同时还提供舒适,安全,节能,高度人性化的生活 空间,将一套被动和静态的家用设备转变为具有“智慧”的工具。提供全方位的信 息交流功能,帮助家庭和外界保持信息交流,优化人们的生活方式,帮助人们有 效安排时间,提高家庭生活安全性,并为家庭节省能源费用等。 关键词:智能家居;综合管理;舒适 前言 由于智能家居的智能化系统需要保证 24 小时运行,因此,必须足够重视智能家居系统的安全性,稳定性和可靠性,以确保各子系统在信息交互程度上的稳定 和实用性不受到控制影响。各子系统自身也需要建立保护机制,如:系统链路的 双冗余备份等。并且在复杂系统环境下有应变机制,能够快速应对变化的能力。 智能家居的概念始于 20 世纪 80 年代初的美国,被称为“Smart Home”。第一 代通过同轴电缆和双芯电缆实现家庭联网,实现照明,窗帘和少量安全防护控制;第二代通过网络和 IP 技术组网实现视频对讲和安全防护功能;第三代是由中央控 制单元完成的集中式智能控制系统,由中控单元完成计量、安防等方面的功能; 第四代是基于互联网技术,根据用户的需求进行个性化的综合性系统。 安全技术是智能家居系统的最基本、核心的技术。它广泛运用于社区和室内 视频呼叫设备,家庭监控,家庭防盗警报和家庭相关的智慧小区。自动控制技术 是智能家居系统必不可少的技术,它广泛用于智能家居控制中心和家用电器的自 动控制模块。它在家庭能源的科学管理和家庭设备的日常管理中发挥着重要作用。 1 国内外研究动态 国外智能家居已经有几十年的历史了,在20世纪八九十年代,智能建筑出现在美国。在此阶段比尔·盖茨也是非常感兴趣的,耗资数千万美元打造了位于美国 西雅图的华盛顿湖畔,名叫“世外桃源2.0”的智能家居豪宅。随着比尔盖茨智能家居的建立,未来智能家居的理念得到了所有人的认可。在智能家居系统研究和开 发方面,美国和欧洲的几个国家一直处于领先地位,新加坡、日本和韩国的研发 地位紧随其后,各个国家都希望在智能家居市场上能够立足。例如,在早期,有 一个由微软开发的“梦想之家”智能家居系统、Nespot 的家庭安全系统。还有三星 还开始为智能家居平台构建原型,主要推广其产品。在 CES 上,三星于2014年 推出了智能家居平台 SmartHome。利用此平台,可以通过网络连接家庭中的各种 设备,并通过智能手机,平板电脑,智能手表,智能电视等控制家庭中的智能家居。由于智能家居具有非常吸引人的前景和巨大的市场,海外市场也需要时间来 进行实施,但这并不妨碍各国公司对智能家居市场的占领欲望。 2013 年 1 月,住宅城市发展部联合开发发展改革委员会宣布了“绿色建筑行 动计划”,要求严格执行城市新建筑的节能标准,完成绿色建筑 10 亿平方米的建设。智能家居无疑是实现绿色建筑的重要武器,对于节能减排具有重要作用。2013年 2 月,工业和信息化部宣布了“十二五”物联网发展规划,并将智能家居纳 入九大应用示范项目领域。4 月 1 日,国家政策引入了每个新社区必须具备访问
抽油机国内外研究现状与发展趋势 一.国内抽油机研发现状 油机是有杆抽油系统中最主要举升设备。根据是否有游梁,可分为游梁式抽油机和无游梁式抽油机。经过一百多年的实践和不断的改进创新,抽油机不管是结构形式还是在使用功能上,都产生了很大的变化。特别是近几十年来,世界对原油的需求量不断加大,对油田深度开采的能力有了更进一步的要求,在很大程度上加快了抽油机技术发展的速度,催生出多种类型。目前,国内抽油机制造厂有数十家,产品类型已多样化,但游梁式抽油机仍处于主导地位。根据公开发表的资料统计,我国现有6大类共45种新型抽油机[1],并且每年约有30种新型抽油机专利,十多种新试制抽油机[2],已形成了系列,基本满足了陆地油田开采的需要。各种新型节能游梁式抽油机如双驴头式抽油机、前置式抽油机、异相曲柄平衡抽油机、前置式气平衡抽油机、下偏杠铃系列节能抽油机[3]和用窄V形带传动的常规抽油机等均已在全国各个油田推广应用,并取得了显著的经济效益。长冲程、低冲次的无游梁式抽油机的研制也取得了一些进展,如由胜利油田研制的无游梁链条抽油机,经过国内十几个油田稠油及丛式井的推广使用[4],在低冲次抽油和抽稠油方面已初见成效。此外,桁架结构的滑轮组增距式抽油机、滚筒式长冲程抽油机已在某些油田进行了工业试验[5];齿轮增距式长冲程抽油机的研制工作也取得了新的进展;质量轻、成本低、便于调速和调整冲程的液压抽油机经过几年的研制和工业性试采油,也积累了一定的经验[6]。其他型式新颖的抽油机如数控抽油机、连续抽油杆抽油机、车载抽油机、磨擦式抽油机、六连杆游梁式抽油机和斜直井抽油机等也正处于不断改造和试生产过程中[7]。然而,游梁式抽油机的缺点是不容易实现长冲程低冲次的要求,因而不能满足稠油井、深抽井和吉气井采油作业的需要。同时,长冲程低冲次的无游梁式抽油机的性能尚有待完善(如油田正在使用的链条式抽油机还存在链条寿命短、换向冲击载荷大和钢丝绳易断、导轨刚.度不足容易变形等问题),而且品种规格还很少,不能适应当前石油工业的发展[8]。液压抽油机至今仍处在研制阶段[9] 二·国外抽油机的研发现状 目前,世界上生产抽油机的国家主要有美国、俄罗斯、法国、加拿大和罗马尼亚等[10]。为了减少能耗,提高采油经济效益,近年来国外研制与应用了许多节能型抽油机。例如异相型抽油机节电15%~35%;前置式抽油机节电368%前置式气平衡抽油机节电35%轮式抽油机节电50%~80%大圈式抽油机节电30%;自动平衡抽油机节电30%~50%;低矮型抽油机节电5%~20%;ROTAFLEX抽油机节电25%智能抽油机节电174%;螺杆泵采油系统节电40%~50%[11]。近年来国外很重视改进和提高抽油机的平衡效果,使抽油机得到更精确平衡。近年来,为了节约能耗、提高采油经济效益,国外研制与应用了许多节能型抽油机,在采油实践中,取得较好的使用效果。如变平衡力矩抽油机,可使上冲程平衡力矩大于下冲程力矩。前置式气平衡抽油机,由于可在动态下调节气平衡,平衡效果较好。气囊平衡抽油机有90%以上载荷得到平衡[12]。双井抽油机可利用两口油井抽油杆柱合理设计得到更精确的平衡。自动平衡抽油机可保证在上下冲程每一瞬间得到较精确的平衡效果[13]。近年来国外研制与应用了多种类型长冲程抽油机,其中包括增大冲程游梁抽油机、增大冲程无游梁抽油机和长冲程无游梁抽油机[14]。1前置式气平衡抽油机美国工J uf kin公司生产的A系列前置式气平衡抽油机具有较好的技术经济指标,抽油机重量减轻40%,尺寸缩小35%,动载荷
基于单片机的智能交通灯控制系统设计 与实现
诚信承诺书 本人郑重承诺:本人承诺呈交的毕业设计《基于单片机的智能交通灯控制系统设计与实现》是在指导教师的指导下,独立开展研究取得的成果,文中引用他人的观点和材料,均在文后按顺序列出其参考文献,设计使用的数据真实可靠。 本人签名: 日期:年月日
基于单片机的智能交通灯控制系统设计与实现 摘要 近年来随着科技的飞速发展,单片机的应用正在不断深入,同时带动传统控制检测技术日益更新。在实时检测和自动控制的单片机应用系统中,单片机往往作为一个核心部件来使用,仅单片机方面知识是不够的,还应根据具体硬件结构软硬件结合,加以完善。 十字路口车辆穿梭,行人熙攘,车行车道,人行人道,有条不紊。那么靠什么来实现这井然秩序呢?靠的就是交通信号灯的自动指挥系统。交通信号灯控制方式很多。本系统采用STC89C52RC单片机以及单片机最小系统和74HC245电路以及外围的按键和数码管显示等部件,设计一个基于单片机的交通灯设计。设计通过两位一体共阴极数码管显示,并能通过按键对定时进行设置。本系统实用性强、操作简单、扩展功能强。 关键词:交通灯;单片机;显示;计时;车流量
Design and implementation of intelligent traffic lights control based on MCU Abstract In recent years along with the rapid development of science and technology, SCM applications are continually deepening, and promote the traditional control detection technology is updated. In real-time detection and automatic control of the microcomputer application system, the microcontroller is often used as a core component, only SCM knowledge is not enough, should be based on specific hardware structure of hardware and software combination, to be perfect. Crossroads shuttle vehicles, pedestrians bustling, car dealership traffic lane, people walkways, everything in good order and well arranged. So what to rely on to realize it in order? Is the traffic lights on the automatic command system. A lot of traffic signal control. This system uses STC89C52RC and 74HC245 system and the smallest transistor driving circuit and a periphery of the keys and digital tube display and other parts, a design based on the single chip design of traffic lights. Design through one of two common cathode nixie tube display, and can be key to regular set. This system is practical, simple operation, strong expanding function. Keywords: Traffic light,SCM,Display,Timing,Traffic flow
智能家居PLC控制系统实现研究 摘要:随着当前人们生活质量的提升,对居住环境和功能的要求也逐渐提升,科学技术的进步则在这一过程中得到了广泛的应用,智能家居PLC控制系统的实现对人们的家居环境的改善有着重要的促进作用。文章主要就智能家居PLC控制系统的优势进行分析,并结合实际对职能家居PLC 控制系统的软硬件设计及功能实现加以探究,希望此次理论研究能对实际操作起到一定指导作用。 关键词:智能家居;PLC控制系统;软硬件设计 引言 随着人们生活水平的改善智能家居已经有了大幅度提升,智能家居主要是建立在住宅平台基础上的,所以有着多种功能,其在系统结构以及管理方面都有着集中的体现。当前的智能家居系统当中所采用的八位或者是十六位单片机是智能控制的核心处理单元,在功能上也相对比较简单化,扩展性能相对较差,所以为能优化这一控制系统,对其采取PLC控制系统的设计策略,从而改善这一现状。 1 智能家居PLC控制系统的优势分析 地产业的智能化以及宽带化的发展使得家居智能控制系统也成为主流,家居智能化在全国的发展比较迅速,这对
家庭的安防工作有着重要的保障作用。智能家居自动控制过程中主要是通过对PLC以及多种软件的应用才能够得以实现的智能控制,这在系统运行的安全可靠性方面能够得到大幅度提升,对继电器的使用得到了减少,从而就使得控制系统在结果上也比较简便,对线路也有了优化实现[1]。PLC系统能有效实现自动检测故障以及显示报警的功能,对检修也比较方便,并能够对系统的控制方案在不改变硬件电路情况下得以有效实现,并在费用上也能够最少化。 2 智能家居PLC控制系统的软硬件设计及功能实现 2.1 智能家居PLC控制系统的硬件设计 在智能家居PLC控制系统的电源模块硬件设计过程中,整流是在通过具备单向导电性元器件将大小和方向交变交 流电转换成直流电的过程。单相整流电路分为单相半波整流电路以及全波整流电路等。对控制模块的硬件设计过程中主要是通过欧姆龙的CPIL系列的PLC,其终端控制系统当中主要控制电动机运转,在不同的机械装置作用下控制自动门窗等终端设备运行。保护模块的硬件设计方面,为能有效对电机过载运行以及电机堵转过电流保护,要能对电路电流实施检测,电流检测模块存在两路信号输出端,也就是采样电流信号转换电压输出端以及TTL高低电平信号输出端[2]。 而在传感器的信号采集硬件设计方面,智能家居传感信号采集部分主要是由可编程序控制器PLC以及驱动执行部
目录 有害气体的检测、报警、抽排.................. . (2) 1 意义与要求 (2) 1.1 意义 (2) 1.2 设计要求 (2) 2 设计总体方案 (2) 2.1 设计思路 (2) 2.2 总体设计方框图 2.3 完整原理图 (4) 2.4 PCB制图 (5) 3设计原理分析 (6) 3.1 气敏传感器工作原理 (7) 3.2 声光报警控制电路 (7) 3.3 排气电路工作原理 (8) 3.4 整体工作原理说明 (9) 4 所用芯片及其他器件说明 (10) 4.1 IC555定时器构成多谐振荡电路图 (11) 5 附表一:有害气体的检测、报警、抽排电路所用元件 (12) 6.设计体会和小结 (13)
有害气体的检测、报警、抽排 1 意义与要求 1.1.1 意义 日常生活中经常发生煤气或者其他有毒气体泄漏的事故,给人们的生命财产安全带来了极大的危害。因此,及时检测出人们生活环境中存在的有害气体并将其排除是保障人们正常生活的关键。本人运用所学的电子技术知识,联系实际,设计出一套有毒气体的检测电路,可以在有毒气体超标时及时抽排出有害气体,使人们的生命健康有一个保障。 1.2 设计要求 当检测到有毒气体意外排时,发出警笛报警声和灯光间歇闪烁的光报警提示。当有毒气体浓度超标时能自行启动抽排系统,排出有毒气体,更换空气以保障人们的生命财产安全。抽排完毕后,系统自动回到实时检测状态。 2 设计总体方案 2.1 设计思路 利用QM—N5气敏传感器检测有毒气体,根据其工作原理构成一种气敏控制自动排气电路。电路由气体检测电路、电子开关电路、报警电路、和气体排放电路构成。当有害气体达到一定浓度时,QM—N5检测到有毒气体,元件两极电阻变的很小,继电器开关闭合,使得555芯片组成的多谐电路产生方波信号,驱动发光二极管间歇发光;同时LC179工作,驱使蜂鸣器间断发出声音;此时排气系统会开始抽排有毒气体。当气体被排出,浓度低于气敏传感器所能感应的范围时,电路回复到自动检测状态。
智能交通灯控制系统的设计
前言 1.1 概述 近年来随着科技的飞速发展,单片机的应用正在不断地走向深入,同时带动传统控制日新月益的更新。在实时检测和自动控制的单片机应用系统中,单片机往往是作为一个核心部件来使用,仅单片机方面知识是不够的,还应根据具体硬件结构,以及针对具体应用对象特点的软件结合,加以完善。交通信号灯的出现,使交通得以有效管制,对于疏导交通流量、提高道路通行能力,减少交通事故有明显效果。 随着微控技术的日益完善和发展,单片机的应用在不断走向深入。它的应用必定导致传统的控制技术从根本上发生变革。也就是说单片机应用的出现是对传统控制技术的革命。它在工业控制、数据采集、智能化仪表、机电一体化、家用电器等领路得到了广泛应用,极大的提高了这些领域的技术水平和自动化控制。因此单片机的开发应用已成为高技术工程领域的一项重大课题。因此了解单片机知识,掌握单片机的应用技术具有重大的意义。 1.2 基于单片机的智能交通灯控制系统设计的意义 国内的交通灯一般设在十字路口,在醒目位置用红、绿、黄三种颜色的指示灯。加上一个倒计时的显示计时器来控制行车。对于一般情况下的安全行车,车辆分流尚能发挥作用,但根据实际行车过程中出现的情况,还存在以下缺点:1.经常出现的情况是某一车道车辆较多,放行时间应该长一些,另一车道车辆较少,放行时间应该短些。2.没有考虑紧急车通过时,两车道应采取的措施,例如,消防车执行紧急任务通过时,两车道的车都应停止,让紧急车通过。 基于传统交通灯控制系统设计过于死板,红绿灯交替是间过于程式化的缺点,智能交通灯控制系统的设计就更显示出了它的研究意义,它能根据道路交通拥护,交叉路口经常出现拥堵的情况。利用单片机控制技术.提出了软件和硬件设计方案,能够实现道路的最大通行效率。
简易风洞及控制系统(G题) 摘要:本帆板控制系统由单片机ATMEGA328作为帆板转角的检测和控制核心,实现按键对风扇转速的控制、调节风力的大小、改变帆板转角θ、液晶显示等功能。引导方式采用角度传感器感知与帆板受风力大小的转角θ的导引线。通过PWM波控制电机风扇风力的大小使其改变帆板摆动的角度θ。风扇控制核心采用L298电机驱动模块,用ATMEGA328单片机为控制核心,产生占空比受数字PID 算法控制的PWM脉冲,实现对直流电机转速的控制,同时利用光电传感器将电机速度转化成脉冲频率反馈到单片机中,实现转速闭环控制,达到转速无静差调节的目的。MMA7455三轴加速传感器把角度输出信号传送给ATMEGA328单片机进行处理。 关键词:ATMEGA328,MMA7455,PWM波,PID算法
目录 1. 系统设计 1.1 任务与要求 1.1.1 主要任务 1.1.2 基本要求 1.1.3 说明 1.2总体设计方案 1.2.1 设计思路· 1.2.2 方案论证与比较 1.2.3 系统的组成 2. 单元电路设计 2.1 风速控制电路 2.2小球测距原理 2.3控制算法 3. 软件设计 3.1风速控制电路设计计算 3.2控制算法设计与实现 3.3程序流程图 4. 系统测试 4.1 调试使用的仪器与方法 4.2 测试数据完整性 4.3 测试结果分析 4.4 结束语 5. 总结 参考文献 附录1 元器件明细表 附录2 电路图图纸 附录3 程序清单
1.1任务与要求 1.1.1 主要任务 设计制作一简易风洞及其控制系统。风洞由圆管、 连接部与直流风机构成,如图所示。 圆管竖直放置,长度约40cm,内径大于4cm且内 壁平滑,小球(直径4cm黄色乒乓球)可在其中上下运 动;管体外壁应有A、B、C、D等长标志线,BC段有 1cm间隔的短标志线;可从圆管外部观察管内小球的位置;连接部实现风机与圆管的气密性连接,圆管底部应有防止小球落入连接部的格栅。控制系统通过调节风机的转速,实现小球在风洞中的位置控制。 1.1.2 基本要求 (1)小球置于圆管底部,启动后5s内控制小球向上到达BC段,并维持5s 以上。 (2)当小球维持在BC段时,用长形纸板(宽度为风机直径的三分之一)遮挡风机的进风口,小球继续维持在BC段。 (3)以C点的坐标为0cm、B点的坐标为10cm;用键盘设定小球的高度位置(单位:cm),启动后使小球稳定地处于指定的高度3s以上,上下波 动不超过±1cm。 (4)以适当的方式实时显示小球的高度位置及小球维持状态的计时。(5)小球置于圆管底部,启动后5s内控制小球向上到达圆管顶部处A端,且不跳离,维持5s以上。 (6)小球置于圆管底部,启动后30s内控制小球完成如下运动:向上到达AB段并维持3~5s,再向下到达CD段并维持3~5s;再向上到达AB段 并维持3~5s,再向下到达CD段并维持3~5s;再向上冲出圆管(可以
智能生活智慧人生智能家居控制系统解决方案 广东领航者科技有限公司
一、概述 本方案设计采用witlife智能家居控制系统。 维德莱夫品牌源自澳大利亚,始创于1989年, Witlife维德莱夫—智能生活·智慧人生,系智能化酒店,智能化家居的领航者,在大洋洲和大中华地区设有研发和业务机构。在全球40多个国家和地区设有经销商和代表处。为智能化生活的进一步发展奠定了厚实的基础,为智能化领航起到了决定性作用。公司自创立以来始终不变的核心理念:为智能生活,提供人性化、专业化的全程智能服务,实现超乎客户满意的惊喜。 Witlife维德莱夫大中华地区总部成立于2010年,Wit life维德莱夫是一家专业从事家庭智能化控制产品与解决方案的研发、生产、销售和服务的全球知名企业,是全球知名的智能家居公司。 Witlife维德莱夫智能家居系统,是采用自动化控制系统、计算机网络系统、网络通讯技术、无线射频(RF)技术于一体的智能控制系统。具有实时显示、即时控制、预设控制、远程控制等功能,可以用家用电脑、手机、平板电脑、RF遥控器、触控面板等多种方式进行控制。通过网络可以完全掌控家庭、酒店所有的灯光、空调、电视、音响、热水器、饮水机、电饭煲、房门、窗帘、供养、浇花等。 Witlife维德莱夫,智能生活,智慧人生,一切尽在掌握之中。 推出的世界上最先进的网络家居控制系统,广泛应用于现代住宅中的安防监控、灯光窗帘、温度湿度、音乐影院等智能控制,并能无
缝接入小区网络对讲、家庭物联网。 二、网络家居控制系统的设计标准 本设计方案主要参照以下设计标准: 1、JGJ/T16-92 (民用建筑电气设计规范) 2、EN50090 (欧洲电工标准) 三、智能家居系统结构原理 智能家居控制系统采用目前最先进的网络架构,分散控制各个子系统,最适合现代家居的应用,其结构如下: 智能家居控制系统结构 智能家居控制系统的基本构成是网络点,网络点通过网络线接入路由器构成的家庭局域网。可以高速双向传输控制、信息、视频、音频等。 由上图可看出,智能家居控制系统平台能够搭载各种控制子系统,除了继电器控制信号,它能控制任何控制协议,传输任何音频、视频、信息数据,并能双向反馈。 智能家居控制系统具有: ?居家安防控制 ?居家监控系统 ?灯光智能控制
沈阳理工大学应用技术学院 基于单片机的智能交通灯控制系统设计 与实现
基于单片机的智能交通灯控制系统设计与实现 摘要 近年来随着科技的飞速发展,单片机的应用正在不断深入,同时带动传统控制检测技术日益更新。在实时检测和自动控制的单片机应用系统中,单片机往往作为一个核心部件来使用,仅单片机方面知识是不够的,还应根据具体硬件结构软硬件结合,加以完善。 十字路口车辆穿梭,行人熙攘,车行车道,人行人道,有条不紊。那么靠什么来实现这井然秩序呢?靠的就是交通信号灯的自动指挥系统。交通信号灯控制方式很多。本系统采用STC89C52RC单片机以及单片机最小系统和74HC245电路以及外围的按键和数码管显示等部件,设计一个基于单片机的交通灯设计。设计通过两位一体共阴极数码管显示,并能通过按键对定时进行设置。本系统实用性强、操作简单、扩展功能强。 关键词:交通灯;单片机;显示;计时;车流量
Design and implementation of intelligent traffic lights control based on MCU Abstract In recent years along with the rapid development of science and technology, SCM applications are continually deepening, and promote the traditional control detection technology is updated. In real-time detection and automatic control of the microcomputer application system, the microcontroller is often used as a core component, only SCM knowledge is not enough, should be based on specific hardware structure of hardware and software combination, to be perfect. Crossroads shuttle vehicles, pedestrians bustling, car dealership traffic lane, people walkways, everything in good order and well arranged. So what to rely on to realize it in order? Is the traffic lights on the automatic command system. A lot of traffic signal control. This system uses STC89C52RC and 74HC245 system and the smallest transistor driving circuit and a periphery of the keys and digital tube display and other parts, a design based on the single chip design of traffic lights. Design through one of two common cathode nixie tube display, and can be key to regular set. This system is practical, simple operation, strong expanding function. Keywords: Traffic light,SCM,Display,Timing,Traffic flow