
第二十八届(2012)全国直升机年会论文
旋翼性能试验一些影响因素探讨
李开成金坤健龙贵华
(中航工业直升机设计研究所景德镇333001)
摘要:本文介绍了旋翼性能试验方法及一些关键技术,包括旋翼天平标定技术、桨距标定技术等。对影
响旋翼性能试验的一些因素进行探讨,包括试验台传力路线的影响、试验台构型的影响、试验台周围环境
影响、风速的影响、桨叶粗糙度影响等。对提升旋翼性能试验精度提出一些建议。
关键词:旋翼性能试验;旋翼天平标定;桨距标定;试验台;风速
0引言
旋翼性能试验是在悬停状态下不同转速下不同总距下获得旋翼的悬停性能,包括悬停效率—拉力关系、拉力—功率关系、拉力—总距关系、功率—总距关系、拉力—拉杆载荷关系,验证旋翼的性能设计指标。
在旋翼性能试验前,需要对桨距和旋翼天平、扭矩天平等进行标定。采集大气温度和压力,得出试验时的大气密度。为了保证不同大气环境下桨尖马赫数相同,需要对标准大气情况下输入旋翼转速进行修正得出实际输入旋翼转速。试验时,实时采集旋翼升力、阻力、俯仰力矩、滚转力矩、扭矩、拉杆载荷等输出值,总距、周期变距输入值,旋翼转速,风速,大气温度、压力等与试验相关参数。根据升力、扭矩、拉杆载荷和总距等,得出拉力系数、扭矩系数、功率系数等,从而得出悬停效率。直到随着总距的增加,悬停效率达到最大值后出现降低一段距离后或者电机功率达到上限值或者载荷限制值达到上限值,总距不再增加。
1旋翼性能试验一些关键技术
旋翼性能试验包含众多的环节,涉及众多因素。在这些环节和因素中,旋翼天平标定和桨距标定尤为关键,分别涉及到输出和输入,直接决定着旋翼性能试验的数据质量。
1.1 旋翼天平标定技术
旋翼塔旋翼天平和扭矩天平可以测量桨毂六力素:拉力、阻力、侧向力、俯仰力矩、滚转力矩和扭矩。旋翼天平标定是利用标定装置按照试验时天平的受力状态,对天平精确地施加载荷,求得各力传感器组合电压分量的输出值与所加载荷的关系,即天平标定公式。在试验中,利用这些公式可以根据天平各分量的输出值求得作用在桨毂上的六力素。由于旋翼塔天平尺寸及重量都大,安装在旋翼塔顶部,拆卸困难。同时考虑到与传动系统的连接关系,采用现场系统标定的方式。标定时,采用单分量加载多分量校核的方法。单分量标定时,得出单分量主系数及对其他分量的一次干扰系数。在六分量加载完毕后,根据加载关系和天平力传感器组合电压输出关系得出天平工作公式。在得出天平工作公式后,采用多分量加载进行校核,检验天平标定的准确性。旋翼天平标定精度可以达到1.0%。
1.2 旋翼桨距标定技术
桨距直接决定着旋翼性能试验的输入精度。桨距标定是标定出总距、周期变距和三个作动筒位移之间的关系。在已知旋翼总距、横向周期变距和纵向周期变距的情况下,需要知道三个作动筒的
不同变化量。这种关系用矩阵的形式进行表达,如式(1)中间矩阵所示,即叠加器矩阵。实际使用
中是采用叠加器矩阵来进行旋翼总距、横向周期变距和纵向周期变距的操纵。
????????????????????=?????????????7.03323133222123121
11321θθθs c a a a a a a a a a L L L (1)
其中1L ?、2L ?和3L ?为三个作动筒变化量,c θ、s θ及7.0θ分别为桨叶处横向周期变距角度、
纵向周期变距角度和总距。桨距标定分为两大步骤:第一步为叠加器初始矩阵的建模计算。第二步
为利用初始叠加器矩阵进行总距和周期变距操纵输入,实测总距和周期变距。根据实测的总距和周期
变距对初始叠加器矩阵进行修正,直至满足桨距标定精度要求[1]。现在桨距标定精度可以达到±0.1°。
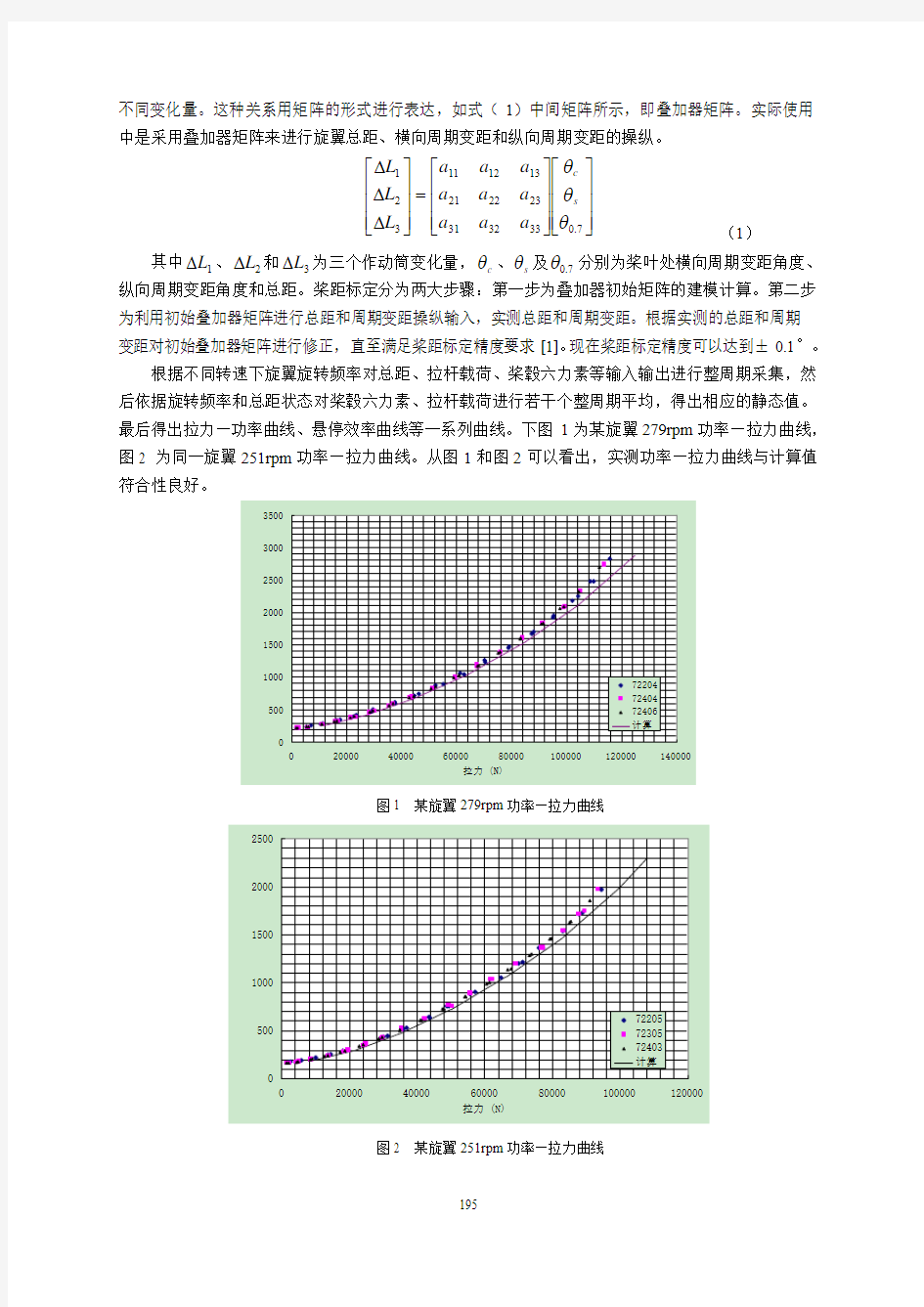
根据不同转速下旋翼旋转频率对总距、拉杆载荷、桨毂六力素等输入输出进行整周期采集,然
后依据旋转频率和总距状态对桨毂六力素、拉杆载荷进行若干个整周期平均,得出相应的静态值。
最后得出拉力—功率曲线、悬停效率曲线等一系列曲线。下图1为某旋翼279rpm 功率—拉力曲线,
图2 为同一旋翼251rpm 功率—拉力曲线。从图1和图2可以看出,实测功率—拉力曲线与计算值
符合性良好。
图1 某旋翼279rpm 功率—拉力曲线
图2 某旋翼251rpm 功率—拉力曲线
2 影响旋翼性能试验一些因素探讨
国外对旋翼性能试验进行了大量的研究,对影响旋翼性能试验的因素分别进行了相应的试验和分析。这些因素包括试验台传力路径的影响、试验台构型的影响、风速的影响以及周围试验环境的影响等。对于有无地效的影响,本文不作介绍。
2.1 试验台传力路径对性能试验的影响[2,3]
由于扭矩和拉力耦合较大,为了降低扭矩和拉力之间的影响,旋翼性能试验一般采用旋翼天平和扭矩天平组合测量。旋翼天平用来测量升力、阻力、侧向力、俯仰力矩和滚转力矩,而扭矩天平用来测量扭矩(偏航力矩)。旋翼试验台一般结构示意图如图3所示。旋翼产生的拉力一路通过旋翼轴传递。旋翼轴传递又分两路传递下去,一路传到旋翼天平浮动框,另外一路传到弹性连轴节上。旋翼产生拉力另外一路通过变距拉杆传到自动倾斜器,自动倾斜器传到作动筒,作动筒传动旋翼天平浮动框上。传到旋翼天平浮动框上的力通过弹性连杆上的力传感器组合测得。因此,旋翼产生的拉力包括旋翼天平和弹性连轴节两部分之和。为了准确测量旋翼产生的拉力,需要标定弹性连轴节的刚度,通过旋翼天平弹性连杆和弹性连轴节的刚度比较,得出旋翼产生总的拉力。为了消除弹性连轴节对旋翼拉力测量的影响,国外有的旋翼试验台设计成圆柱销形式,只传递扭矩而不受拉力,如图4所示。
图3 旋翼试验台结构示意图
2.2 试验台构型对性能试验的影响[4]
在1990年NASA 的Cahit Kitapiloglu 等人研究了两种旋翼台的构型对旋翼性能试验的影响。一种旋翼台构型为“OARF I ”,如图5所示,诱导速度向下,另外一种为“OARF I I”,诱导速度向上,如图6所示。在OAFR I 构型中诱导入流作用在台体上,造成下洗载荷。在OAFR II 构型中,诱导入流吹向上空,无任何阻塞。
对于OARF I 构型,为了修正下洗载荷效应,对拉力系数进行相应修正,修正公式如下:
)1)(()(02D T
c T
C R S C C πσσ+= (2)
其中T C 为拉力系数,σ为旋翼实度,R 为桨叶半径,S为试验台阻塞面积,
0D C 为试验台型阻系数。对于旋翼试验所在的雷诺数范围,0D C 几乎为常数,在1.1~1.2之间。功率系数认为不受下洗载荷效应影响,不需要修正。图7给出了两种试验台构型悬停效率曲线,包含了OAFRI测
量数据、OAFRI修正数据和OAFRII数据。可以看出修正后的数据比修正前悬停效率要大幅提高。
图4 国外某旋翼试验台构型
图5 OARF I 试验台构型 图6 OARF II 试验台构型
图7 两种试验台构型及修正悬停性能曲线
2.3 周围环境对性能试验的影响[4,6]
1990年NASA 的Cahit Kitapiloglu 在模型旋翼性能试验中,研究了试验台在室外和Ames 40英尺×80英尺风洞中不同的性能试验。在NASA 的Ames 风洞中进行了S-76悬停性能试验,比较了旋翼在风洞的方位的影响,图8为旋翼在风洞中的方位示意图。图9为旋翼在不同方位的悬停性能试验曲线。从图9可以发现在不同方位悬停效率的差异。当旋翼尾迹作用在风洞洞体上时,形成入流回旋。当入流回旋时可以认为旋翼是在低速度垂直上升。直升机空气动力学表明,在给定的拉力情况下垂直上升需要另外的旋翼功率。因此,当产生入流回旋时悬停效率要低于没有产生入流回旋时。
图8 旋翼在风洞中的方位图 图9 旋翼在不同方位悬停性能曲线
2.4 风速对性能试验的影响[2,4,5]
1948年Langley 气动试验室Paul J Carpenter 等人研究了风速对悬停性能的影响。1985年NASA 的Fort Felker 在全尺寸XV-15悬停性能试验中,研究了小于1.5m/s 风速对悬停性能的影响。1990年NASA 的Cahit Kitapiloglu 在模型旋翼性能试验中,利用OAFR II 构型,研究了风速小于1.3m/s 和大于1.3m/s 的对悬停性能的影响,如图10所示。研究表明当风速较大时对旋翼悬停性能试验有着显著的影响。风速的存在也使得数据波动量较大。国外试验时,风速要小于s m /5.1。当风速小于s m /5.1,引入的悬停效率误差一般小于3%。风速导致扭矩系数的修正公式如下。
T h i Y y T x Q C Q C K C u C u C C )()(,λλ--++=
4222))((h x i y i u u λλλ=-+ 其中C Q C ,修正扭矩系数,Q C 扭矩系数,Y C 侧向力系数,Tip V 桨尖速度,h V 理想悬停诱导速度
2/T Tip C V ,i V 理想诱导速度,w V 风速大小,h λ理想悬停诱导速度比Tip h V V , i V 理想诱导速度比Tip i V V ,K 为修正系数,y u 侧向风速比Tip w w V V /sin ?-,x u 轴向风速比Tip w w V V /cos ?,w ?相对旋翼轴线风速的方向,如图11所示。
图10 在OAFR II 构型中两种风速下悬停效率曲线 图11 风速方向示意图
2.5 桨叶粗糙度对性能试验的影响[7]
1958年Langley气动试验室的James P. Shivers等人研究了桨叶粗糙度对性能的影响。比较了桨尖马赫数0.27、0.46、0.55和0.76时光滑和粗糙桨叶前缘的性能数据,如图12所示,实线为光滑桨叶数据,虚线为粗糙桨叶数据。图12表明光滑桨叶悬停效率高于粗糙桨叶。桨叶前缘粗糙度增加了零升力型阻系数,同时降低了桨叶最大拉力系数。一般而言,桨叶前缘粗糙度的增加,导致阻力的增加,降低了旋翼平均升力系数,特别是在小的桨尖马赫情况下。
图12 不同马赫数情况下光滑桨叶与粗糙桨叶性能曲线
3总结
从以上可以看出旋翼性能试验受试验台传力路径、试验台构型、风速、桨叶粗糙度等众多因素影响。为了提高旋翼性能试验精度,需要考虑这些影响,并对这些影响加以修正。为此需要从以下几个方面加以提高:
1)旋翼天平测得拉力和弹性连轴节测得拉力之和才是旋翼产生的总拉力。因此,试验前需要精确标定弹性连轴节刚度,试验时需测量弹性连轴节位移。
2)下洗载荷效应对性能试验的影响。旋翼塔旋翼诱导速度向下,下洗流作用在试验台体上。不同型号的下洗载荷效应不同。因此,在不同型号的旋翼性能试验时,需要确定试验台台体的阻塞面积和阻力系数。
3)周围环境对性能试验的影响。试验台处在周围的环境中。当尾迹作用在周围环境时,会形成回旋。因此,需要考虑周围环境的影响。但是,此方面的影响难以比较确认,只能发现是否形成尾迹回旋。
4)风速对性能试验的影响。由于目前不具备实时采集的能力,只能试验前采集,无法对试验过程中的风速进行记录,并将风速对旋翼性能试验影响加以修正。
5)桨叶粗糙度对性能试验的影响。由于目前桨叶上贴有不同位置的应变片,对旋翼性能试验有影响。以后,应比较贴有应变片和没有贴应变片的旋翼性能试验数据。
参考文献
[1] 李开成,尹春望等,一种旋翼提前操纵角试验测量方法,第26届直升机年会,2010
[2] Fort F.Felker, Mark D. Betzina and David B.Signor, Performance and Loads Data from a Hover Test of a Full-scale
XV-15 Rotor,NASA TM-86833, 1985
[3] Johannes M.van Aken, Analysis of Calibration Data for the Multi-Component Rotor Balance Installed in the NFAC
Large Rotor Test Apparatus, AIAA 2007-146, 2007
[4] Cahit Kitapiloglu, Analysis of Small-Scale Rotor Hover Performance Data, NASA TM-102271, 1990
[5] Paul J. Carpenter, Effect of Wind Velocity on Performance of Helicopter Rotors as Investigated with the Langley
Helicopter Apparatus, NACA TN No.1699, 1948
[6] Patrick M. Shinoda, Wayne Johnson, Performance Results from a Test of S-76 Rotor in the NASA Ames 80-by120-
Foot Wind Tunnel, AIAA -93-3414-CP, 1993
[7] James P. Shivers and Paul J.Carpenter, Effects of Compressibility on Rotor Hovering Performance and Synthesized
Blade-Section Characteristic Derived from Measured Rotor Performance of Blades Having NACA 0015 Airfoil Tip Sections, NACA TN 4356, 1958
The Discussion on some Issues influencing
the Rotor Performance Test
Li Kaicheng Jin Kunjian Long Guihua
(China Helicopter Research and Development Institute,Jing dezhen,333001)
Abstract:The method of rotor performance test and some key technologies are introduced, such as the rotor balance calibration, the rotor pitch angle calibration. Some issues influencing the rotor performance test are discussed, such as the test bench force transmission, the test bench configuration, the test bench environment effect ,the wind effect and the blade roughness effect. Some ingestions are provided for improving the rotor performance test accuracy.
Key words: the rotor performance test, rotor balance calibration, rotor pitch angle calibration, test bench, wind effect
地下水动力学实验 实验报告 学院:水利电力学院 专业:水文与水资源工程 指导老师: 学号:2013 姓名: 实验成绩:100 MODFLOW -概念模型 建立MODFLOW 模型有两种方法:网格方法或概念模型方法。网格方法是直接利用3D 网格,应用surces/sinks 和其它模型参数,基于单元的形式建立模型。概念模型方法利用Map 模块的GIS 工具来建立概念模型。在概念模型里,sources/sinks,含水层参数,模型边界等都可以在概念模型里设定。当模型建立完成后,将生成网格并把概念模型转化为网格模型,所有的单元属性都自动设定。
一、实验任务: 1. 导入背景图片 2. 创建和定义图层 3. 将图层转化为三维网格 4. 导入离散点并将坐标差值 5. 将概念模型转入MODFLOW 6. 检查并运行MODFLOW 7. 查看结果 二、实验问题描述: 模拟垃圾堆放区的溶质运移问题。我 们将模拟山前河谷堆积中地下水情况。其 中,模型北部为山区露头,南部有两条河 流汇聚。南北向剖面图见图2-lb模型的底 部为北部山区的灰岩露头。主要有两层含 水层,上部为潜水下部为承压含水层。边 界条件设置如下,北部为隔水边界,南部 为定水头边界根据河流的水位赋值。仅靠 降雨补给。区域内有几条小溪,有时溪水 干涸,有时会受地下水的补给形成溪流。 我们将用drains 来处理这些溪水。此外, 区域内还有两口生产井。 三、实验步骤: 1、开始 启动GMS如果己经启动,选择File/New 命令。 2、导入背景图片 (1).选择打开键
(2). 选择安装目录下的途径tutfiles\MODFLOW\modfmap (3). 打开start.gpr 3、保存 (1). 选择File/Save (2). 将文件另存为eastex 4、定义单位 (1).选择Edit/Units (2).选择m作为长度单位;选择d作为时间单位(3).点击OK
分子平衡与动态行为的动力学模拟实验详解 吴景恒 实验目的: (1)掌握Hyperchem中的分子建模方法 (2)掌握运用分子力学进行几何优化的方法,能正确设置力场参数及几何优化参数 (3)掌握分子动力学、Langevin动力学及Monte Carlo模拟方法, 能正确设置模拟参数 (4)通过动力学或Monte Carlo模拟,获取低能量的结构和热力学参数 实验注意: (1)穿实验服;实验记录用黑色,蓝色或蓝黑色钢笔或签字笔记录;实验数据记录不需要画表格 (2)实验前请先仔细阅读前面的软件使用介绍,然后逐步按照实验步骤所写内容进行操作 (3)截图方法:调整视角至分子大小适中,按下键盘上的PrintScreen按键截图,从“Windows开始菜单”打开“画图”工具,按Ctrl+v或“编辑-粘贴”,去掉四周多余部分只留下分子图形,保存图片 (4)所有保存的文件全部存在E盘或D盘根目录用自己学号命名的文件夹下,不要带中文命名,实验完毕全部删除,不得在计算用机上使用自己携带的U盘或其他便携存储设备! Hyperchem使用介绍: 本次实验用到的工具: Draw:描绘分子工具,在工作区单击画出原子,拖拽画出成键原子,在分子键上单击更改成键类型,双击会出现如下元素周期表用于选择不同原子建立分子 Select:选择原子工具,选中的原子或键会呈现绿色,在原子上单击左键选择对应原子/分子(选择模式对应在Select 菜单下Atoms/Moleculars更改),在原子上右击取消选择该原子,在工作区单击选择全部分子,在工作区右击取消全部分子;同时选中(确保Select – Multiple Selections为选中状态)两个原子时在状态栏显示键长(单位为?),同时选中三个原子显示键角,同时选中四个原子显示二面角 Rotate out-of-plane:平面外旋转工具,转换视角用 Rotate in-plane:平面内旋转工具,转换视角用 Translate:平移工具,转换视角用 Mgnify/Shrink:放大镜工具,转换视角用 Model Builder:分子建模工具,左三分别用于画C, N, O原子,最右为建立分子模型
循环性能对锂离子电池的重要程度无需赘言;另外就宏观来讲,更长的循环寿命意味着更少的资源消耗。因而,影响锂离子电池循环性能的因素,是每一个与锂电行业相关的人员都不得不考虑的问题。以下文武列举几个可能影响到电池循环性能因素,供大家参考。 材料种类:材料的选择是影响锂离子电池性能的第一要素。选择了循环性能较差的材料,工艺再合理、制成再完善,电芯的循环也必然无法保证;选择了较好的材料,即使后续制成有些许问题,循环性能也可能不会差的过于离谱(一次钴酸锂克发挥仅为135.5mAh/g 左右且析锂的电芯,1C虽然百余次跳水但是0.5C、500次90%以上;一次电芯拆开后负极有黑色石墨颗粒的电芯,循环性能正常)。从材料角度来看,一个全电池的循环性能,是由正极与电解液匹配后的循环性能、负极与电解液匹配后的循环性能这两者中,较差的一者来决定的。材料的循环性能较差,一方面可能是在循环过程中晶体结构变化过快从而无法继续完成嵌锂脱锂,一方面可能是由于活性物质与对应电解液无法生成致密均匀的SEI膜造成活性物质与电解液过早发生副反应而使电解液过快消耗进而影响循环。在电芯设计时,若一极确认选用循环性能较差的材料,则另一极无需选择循环性能较好的材料,浪费。 正负极压实:正负极压实过高,虽然可以提高电芯的能量密度,但是也会一定程度上降低材料的循环性能。从理论来分析,压实越大,相当于对材料的结构破坏越大,而材料的结构是保证锂离子电池可以循环使用的基础;此外,正负极压实较高的电芯难以保证较高的保液量,而保液量是电芯完成正常循环或更多次的循环的基础。 水分:过多的水分会与正负极活性物质发生副反应、破坏其结构进而影响循环,同时水分过多也不利于SEI膜的形成。但在痕量的水分难以除去的同时,痕量的水也可以一定程度上保证电芯的性能。可惜文武对这个方面的切身经验几乎为零,说不出太多的东西。大家有兴趣可以搜一搜论坛里面关于这个话题的资料,还是不少的。 涂布膜密度:单一变量的考虑膜密度对循环的影响几乎是一个不可能的任务。膜密度不一致要么带来容量的差异、要么是电芯卷绕或叠片层数的差异。对同型号同容量同材料的电芯而言,降低膜密度相当于增加一层或多层卷绕或叠片层数,对应增加的隔膜可以吸收更多的电解液以保证循环。考虑到更薄的膜密度可以增加电芯的倍率性能、极片及裸电芯的烘烤除水也会容易些,当然太薄的膜密度涂布时的误差可能更难控制,活性物质中的大颗粒也可能会对涂布、滚压造成负面影响,更多的层数意味着更多的箔材和隔膜,进而意味着更高的成本和更低的能量密度。所以,评估时也需要均衡考量。 负极过量:负极过量的原因除了需要考虑首次不可逆容量的影响和涂布膜密度偏差之外,对循环性能的影响也是一个考量。对于钴酸锂加石墨体系而言,负极石墨成为循环过程中的“短板”一方较为常见。若负极过量不充足,电芯可能在循环前并不析锂,但是循环几百次后正极结构变化甚微但是负极结构被破坏严重而无法完全接收正极提供的锂离子从而析锂,造成容量过早下降。 电解液量:电解液量不足对循环产生影响主要有三个原因,一是注液量不足,二是虽然注液量充足但是老化时间不够或者正负极由于压实过高等原因造成的浸液不充分,三是随着循环电芯内部电解液被消耗完毕。注液量不足和保液量不足文武之前写过《电解液缺失对电芯性能的影响》因而不再赘述。对第三点,正负极特别是负极与电解液的匹配性的微观表现为致密且稳定的SEI的形成,而右眼可见的表现,既为循环过程中电解液的消耗速度。不完整的SEI膜一方面无法有效阻止负极与电解液发生副反应从而消耗电解液,一方面在SEI 膜有缺陷的部位会随着循环的进行而重新生成SEI膜从而消耗可逆锂源和电解液。不论是对循环成百甚至上千次的电芯还是对于几十次既跳水的电芯,若循环前电解液充足而循环后电解液已经消耗完毕,则增加电解液保有量很可能就可以一定程度上提高其循环性能。 测试的客观条件:测试过程中的充放电倍率、截止电压、充电截止电流、测试中的过充过放、测试房温度、测试过程中的突然中断、测试点与电芯的接触内阻等外界因素,都会
四轴飞行器的建模与仿真 摘要 四旋翼飞行器是一种能够垂直起降的多旋翼飞行器,它非常适合近地侦察、监视的任务,具有广泛的军事和民事应用前景。本文根据对四旋翼飞行器的机架结构和动力学特性做详尽的分析和研究,在此基础上建立四旋翼飞行器的动力学模型。四旋翼飞行器有各种的运行状态,比如:爬升、下降、悬停、滚转运动、俯仰运动、偏航运动等。本文采用动力学模型来描述四旋翼飞行器的飞行姿态。在上述研究和分析的基础上,进行飞行器的建模。动力学建模是通过对飞行器的飞行原理和各种运动状态下的受力关系以及参考牛顿-欧拉模型建立的仿真模型,模型建立后在Matlab/simulink软件中进行仿真。 关键字:四旋翼飞行器,动力学模型,Matlab/simulink Modeling and Simulating for a quad-rotor aircraft ABSTRACT The quad-rotor is a VTOL multi-rotor aircraft. It is very fit for the kind of reconnaissance mission and monitoring task of near-Earth, so it can be used in a wide range of military and civilian applications. In the dissertation, the detailed analysis and research on the rack structure and dynamic characteristics of the laboratory four-rotor aircraft is showed in the dissertation. The dynamic model of the four-rotor aircraft areestablished. It also studies on the force in the four-rotor aircraft flight principles and course of the campaign to make the research and analysis. The four-rotor aircraft has many operating status, such as climbing, downing, hovering and rolling movement, pitching movement and yawing movement. The dynamic model is used to describe the four-rotor aircraft in flight in the dissertation. On the basis of the above analysis, modeling of the aircraft can be made. Dynamics modeling is to build models under the principles of flight of the aircraft and a variety of state of motion, and Newton - Euler model with reference
海洋工程水动力学试验研究 作者:杨建民,肖龙飞,盛振邦编著 出版社:上海交通大学出版社 出版时间: 2008-1-1字数: 219000版次: 1页数: 136印刷时间: 2008/01/01开本: 16开印次: 1纸张:胶版纸I S B N : 9787313050649包装:平装编辑推荐全书共分9章。第1章为总论,简要介绍海洋资源和海洋油气开发概况,我国海疆和海上油气资源、海洋环境条件、海洋平台的种类。第2章介绍模型水动力试验研究的历史沿革及其对科技进步的作用,国内外主要海洋工程水池及主要试验设施。第3章重点阐述模型试验研究的基础理论,包括:相似理论、海洋环境条件(特别是海浪)的理论描述、浮式海洋平台运动与受力的分析、线性系统响应的频域分析和时域分析方法。余下各章主要结合上海交通大学海洋工程国家重点实验室十多年的工作经验,系统地阐述海洋平台模型(包括锚泊线、立管等)的制作和有关参数的模拟调节;水池中风、浪、流等海洋环境的模拟;各类测试仪器的介绍和标定;模型在静水、规则波和不规则波中的试验;测量数据的采集;试验数据的处理与分析以及试验研究项目的实施规程等有关内容。此外,对于深海平台的试验技术也进行了专题介绍,以适应海洋石油开发不断向深海拓展的需要。 内容简介 本书介绍船舶与海洋工程结构物在海洋风、浪、流环境条件作用下水动力性能的模型试验研究方法及相关理论。主要内容包括:海洋油气开发与海洋平台简介;海洋工程水动力模型试验的历史沿革、作用,国内外水池及其主要设施,水动力学基础;模型制作及海洋环境条件模拟的方法和理论;测量仪器的分类、标定及模型测试校验;模型在风、浪、流中的各种试验内容与方法;试验数据的处理与分析;试验研究项目的实施规程;深海平台模型试验技术概述。 本书是我国海洋工程国家重点实验室多年来试验研究工作的总结,同时吸收了国际上的最新研究成果,注重实践能力的培养。可作为高等院校船舶与海洋工程专业的本科生教材和研究生的教学参考用书,也可供海上油气开发部门、船厂、设计研究单位从事海洋工程科技人员参考。 目录 第1章总论 1.1 海洋开发与海洋工程概述 1.2 海洋油气开发简介 1.3 我国的海疆和海上油气资源
1.影响蓄电池质量的技术问题 1)电池构成 VRLA电池由正极板、负极板、AGM隔膜、正负汇流条、电解液、安全阀、盖和壳组成。其中正极板栅厚度、合金成份、AGM隔膜厚度均匀性、汇流条合金、电解液量、安全阀开闭压力、壳盖材料、电池生产工艺等对电池寿命和容量均匀性具有重要影响。 2)板栅合金 VRLA电池负板栅合金一般为Pb-Ca系列合金,正板栅合金有Pb-Ca系列、Pb-Sb(低)系列和纯Pb等,其中Pb-Ca、Pb-Sb(低)合金正板栅电池浮充寿命相近,但循环寿命相差较大,对于经常停电地区选用低锑合金电池可靠性好。 3)板栅厚度 极板的正板栅厚度决定电池的设计寿命。 4)安全阀 安全阀是电池的一个关键部件,具有滤酸、防爆和单向开放功能,YD/T7991 996规定安全开闭压力范围为1-49kPa,但是,对于长寿命电池,必须考虑单向密封,防止空气进人电池内部,同时防止内部水蒸气在较高温度下跑掉。 5)AGM隔膜 隔膜孔隙率和厚度均匀性,直接影响隔膜吸酸饱和度和装配压缩比,从而影响电池寿命和容量均匀性。 6)壳盖材料 VRLA电池壳盖材料有PP、ABS和PVC,PP材料相对较好。 7)酸量和化成工艺 分为电池化成和槽化成两种,电池化成可以定量注酸并记录每个电池单体化成全过程数据,能准确判断每个出厂电池综合生产质量状况,但化成时间较长。槽化成是对极板化成,化成时间短,极板化成较充分,但对电池组装质量不能通过化成过程数据记录判断。 8)涂板工艺 涂板工艺要保证极板厚度和每片极板活性物质的均匀性。 9)密封技术 VRLA电池密封技术包括极柱密封、壳盖材料透水性、壳盖密封和安全阀密封。 10)氧复合效率 AGM电池具有良好的氧复合效率,贫液状态下按有关标准测试氧复合效率一般大于98%,因此具有良好的免维护性能。 2.影响蓄电池寿命的环境因素 1)环境温度 蓄电池正常运行的温度是20~40℃,最佳运行温度是25℃。当温度每升高5℃,蓄电池的使用寿命降低10%,且容易发生热失控。 2)环境湿度 蓄电池的运行湿度应该在5~95%(不结露)之间,环境湿度过高,会在蓄电池表面结露,容易出现短路;环境湿度过低,容易产生静电。 3)灰尘 灰尘过多,容易使蓄电池短路,安全阀堵塞失效。 3.蓄电池失效模式 1)电池失水
氮气系统性能确认方案Performance Qualification Protocol for Nitrogen System 性能确认 PQ 目录
1. 验证目的Validation purpose (3) 2. 验证范围Validation Scope (3) 3. 验证周期Validation Cycle (3) 4. 成员及其职责Members and their responsibilities (3) 5. 规程Regulations (4) 6. 工作表Work tables (8) 7. 附表 (16) 8. 最终审核和批准Final conclusion and approval (17)
1.验证目的Validation purpose 本性能确认的目的为确认公司氮气系统中氮气各项参数测试满足标准要求,从而证明该系统为车间提供的氮气是能满足生产要求的。性能确认检查的结果将按照该验证方案进行记录。 2.验证范围Validation Scope 2.1 验证适用范围 本文件用于氮气系统的性能确认,确认内容包括悬浮粒子、微生物、含油量、含水量等。在本文件执行过程中对系统相关文件进行审核,如系统图纸等;它们的相关复印件也包含在文件中。 本方案适用于公司氮气系统的性能确认的验证概要。证实氮气系统的性能符合要求。 2.1.1 系统运行验证的各项接受标准须符合现行GMP的要求。 2.1.2 本系统的运行必须符合现行GMP及相关法律法规的要求。 2.1.3 本系统相关人员已接受相应的培训,并有培训记录。 2.1.4 本验证方案中仅记录验证执行的有关环节及验证实施过程中的有关分析项目测试结果,验证执行以后的测试项目另行记录并在验证报告中进行阐述。 2.2 系统描述 氮气系统主要用于生产车间物料的压滤和含有溶媒物料储罐压力的平衡,溶媒物料溶液的流加,立式真空干燥器的压力平衡。该系统由氮气除水过滤器、除油过滤器、氮气精过滤器及连接管路组成,能够对氮气系统进行除水、除油净化处理。 2.3 相关验证 氮气系统性能确认 2.4 验证依据 《药品生产验证指南(2003)》 《药品生产质量管理规范2010》 GB-T 3864-2008 工业氮 《洁净压缩气体质量标准》 《尘埃粒子计数器操作规程》 《压缩气体质量标准》 3.验证周期Validation Cycle 此次验证为周期性验证,正常情况下每年执行一次验证,当氮气系统出现较大变动时,则需要进行再验证,验证合格后方可继续使用。 4.成员及其职责Members and their responsibilities
四旋翼自主飞行器(A题) 摘要 四旋翼飞行器是无人飞行器中一个热门的研究分支,随着惯性导航技术的发展与惯导传感器精度的提高,四旋翼飞行器在近些年得到了快速的发展。 为了满足四旋翼飞行的设计要求,系统以STM32F103VET6作为四旋翼自主飞行器控制的核心,处理器内核为ARM32位Cortex-M3 CPU,最高72MHz工作频率,工作电压3.3V-5.5V。该四旋翼由电源模块、电机电调调速控制模块、传感器检测模块、飞行器控制模块等构成。飞行姿态检测模块是通过采用MPU-6050模块,整合3轴陀螺仪、3轴加速度计,检测飞行器实时飞行姿态,实现飞行器运动速度和转向的精准控制。传感器检测模块包括红外障碍传感器、超声波测距模块,在动力学模 型的基础上,将四旋翼飞行器实时控制算法分为两个PID 控制回路,即位置控制回 路和姿态控制回路。测试结果表明系统可通过各个模块的配合实现对电机的精确控制,具有平均速度快、定位误差小、运行较为稳定等特点。 关键词:四旋翼飞行器;STM32;飞行姿态控制;串口PID
目录 1 系统方案论证与控制方案的选择...................................................................- 2 - 1.1 地面黑线检测传感器...................................................................... .............- 2 - 1.2 电机的选择与论证...................................................................... .................- 2 - 1.3 电机驱动方案的选择与论证...................................................................... .- 2 - 2 四旋翼自主飞行器控制算法设计...................................................................- 3 -
局部阻力损失试验 姓名 班级 学号 实验日期 同组姓名 北京航空航天大学流体所
局部阻力损失试验 一、实验目的要求 1.掌握三点法、四点法量测局部阻力系数的技能; 2.通过对圆管突扩局部阻力系数的包达公式和突缩局部阻力系数的经验公式的实验验证与分析,熟悉用理论分析法和经验建立函数式的途径; 3.加深对局部阻力损失机理的理解。 二、实验装置 本试验装置如图1所示: 图1 局部阻力系数实验装置图 1.自循环供水器;2.试验台;3.可控硅无级调速器;4.恒压水箱5.溢流板; 6.稳水孔板;7.突然扩大实验管段;8.测压计;9.滑动测量尺; 10.测压管;11.突然收缩实验管段;12.试验流量调节阀。
实验管道由小 → 大 → 小三种已知管径的管道组成,共设有六个测压孔,测孔1-3和3-6分别测量突扩和突缩的局部阻力系数。其中测孔1位于突扩界面处,用以测量小管出口端压强值。 三、实验原理 写出局部阻力前后两断面的能量方程,根据推导条件,扣除沿程水头损失可得: 1.突然扩大 采用三点法计算,下式中f12h -由f23h -按流长比例换算得出。 实测 2 21 1 2 2 je 12f12p v p v h [(Z )][(Z )h ]2g 2g ααγ γ -=++ -+ + + 21 e je v h / 2g αζ= 理论 '2 1e 2 A (1)A ζ=- 2' ' 1 je e v h 2g αζ= 2.突然缩小 采用四点法计算,下式中B 点为突缩点,f4-B f3-4h h 由换算得出,fB 5f56h h --由换算得出。 实测 2 25 5 4 4 js 4f4B 5fB-5p v p v h [(Z )h ][(Z )h ]2g 2g ααγγ -=+ + --+ + + 25 s js v h / 2g αζ= 经验 '5 s 3 A 0.5(1)A ζ=- 2' ' 5 js s v h 2g αζ=
酶动力学综合实验 实验(一)——碱性磷酸酶Km值的测定 【目的要求】 1.了解底物浓度对酶促反应速度的影响 2.了解米氏方程、Km值的物理意义及双倒数作图求Km值的方法。 【实验原理】 1、碱性磷酸酶: 碱性磷酸酶是广泛分布于人体各脏器器官中,其中以肝脏为最多。其次为肾脏、骨骼、肠和胎盘等组织。但它不是单一的酶,而是一组同功酶。本实验用的碱性磷酸酶是从大肠杆菌中提取的。 2、米氏方程: Michaelis-Menten 在研究底物浓度与酶促反应速度的定量关系时,导出了酶促反应动力学的基本公式,即: 错误!未找到引用源。(1) 式中:v表示酶促反应速度, 错误!未找到引用源。表示酶促反应最大速度, [S]表示底物浓度, 错误!未找到引用源。表示米氏常数。 3、错误!未找到引用源。值的测定主要采用图解法,有以下四种: ①双曲线作图法(图1-1,a) 根据公式(1),以v对[s]作图,此时1/2错误!未找到引用源。时的底物浓度[s]值即为Km值,以克分子浓度(M)表示。这种方法实际上很少采用,因为在实验条件下的底物浓度很难使酶达到饱和。实测错误!未找到引用源。一个近似值,因而1/2错误!未找到引用源。不精确。此外由于v对[S]的关系呈双曲线,实验数据要求较多,且不易绘制。 ②Lineweaver- Burk作图法双倒数作图法(图1-1,b) 实际工作中,常将米氏方程(式(1))作数学变换,使之成为直线形式,测定要方便、精确得多。其中之一即取(1)式的倒数,变换为Lineweaver- Burk方程式:错误!未找到引用源。(2) 以错误!未找到引用源。对错误!未找到引用源。作图,即为y=ax+b形式。此时斜率为错误!未找到引用源。,纵截距为错误!未找到引用源。。把直线外推与横轴相交,其截距相交,其截距即为—错误!未找到引用源。。 ③Hofstee作图法(略) 把(2)式等号两边乘以错误!未找到引用源。,得: 错误!未找到引用源。(3) 以v对错误!未找到引用源。作图,这时斜率为错误!未找到引用源。,纵截距
编号:SM-ZD-22393 影响锂电池安全因素Organize enterprise safety management planning, guidance, inspection and decision-making, ensure the safety status, and unify the overall plan objectives 编制:____________________ 审核:____________________ 时间:____________________ 本文档下载后可任意修改
影响锂电池安全因素 简介:该安全管理资料适用于安全管理工作中组织实施企业安全管理规划、指导、检查 和决策等事项,保证生产中的人、物、环境因素处于最佳安全状态,从而使整体计划目 标统一,行动协调,过程有条不紊。文档可直接下载或修改,使用时请详细阅读内容。 锂离子电池作为可靠的能源已经广泛应用于小型电源驱动设备,但由于热稳定性引起的安全问题,其使用在大型电池特别是用于电动汽车(EV)和混合动力汽车(HEV)的动力锂离子电池方面受到限制。本文从锂离子电池材料和制作工艺两个方面分析影响锂离子电池安全性能的因素,并进一步分析锂离子电池组安全性的关键问题。关键词:锂离子电池;安全性能;热稳定性;影响因素 安全性能是锂离子电池,特别是锂离子动力电池所关心的焦点问题。锂离子电池与金属锂二次电池相比,在安全性能方面有了很大的提高,但在实际应用中仍然存在许多隐患。特别是用于电动汽车(EV)和混合动力汽车(HEV)的动力锂离子电池,其充放电电流大,散热条件差,导致电池内部温度升高[1,2]。根据P.H.Biensan 等[3]的研究证明:锂离子电池在滥用的条件下有可能达到使铝集流体熔化的高温(>700℃),从而导致电池出现冒烟、着火爆炸、乃至人员受伤
影响锂离子电池循环性能的几个因素 (锂电技术水太深,文武的东西别当真) 循环性能对锂离子电池的重要程度无需赘言;另外就宏观来讲,更长的循环寿命意味着更少的资源消耗。因而,影响锂离子电池循环性能的因素,是每一个与锂电行业相关的人员都不得不考虑的问题。以下文武列举几个可能影响到电池循环性能因素,供大家参考。 材料种类:材料的选择是影响锂离子电池性能的第一要素。选择了循环性能较差的材料,工艺再合理、制成再完善,电芯的循环也必然无法保证;选择了较好的材料,即使后续制成有些许问题,循环性能也可能不会差的过于离谱(一次钴酸锂克发挥仅为135.5mAh/g左右且析锂的电芯,1C虽然百余次跳水但是0.5C、500次90%以上;一次电芯拆开后负极有黑色石墨颗粒的电芯,循环性能正常)。从材料角度来看,一个全电池的循环性能,是由正极与电解液匹配后的循环性能、负极与电解液匹配后的循环性能这两者中,较差的一者来决定的。材料的循环性能较差,一方面可能是在循环过程中晶体结构变化过快从而无法继续完成嵌锂脱锂,一方面可能是由于活性物质与对应电解液无法生成致密均匀的SEI膜造成活性物质与电解液过早发生副反应而使电解液过快消耗进而影响循环。在电芯设计时,若一极确认选用循环性能较差的材料,则另一极无需选择循环性能较好的材料,浪费。 正负极压实:正负极压实过高,虽然可以提高电芯的能量密度,但是也会一定程度上降低材料的循环性能。从理论来分析,压实越大,相当于对材料的结构破坏越大,而材料的结构是保证锂离子电池可以循环使用的基础;此外,正负极压实较高的电芯难以保证较高的保液量,而保液量是电芯完成正常循环或更多次的循环的基础。 水分:过多的水分会与正负极活性物质发生副反应、破坏其结构进而影响循环,同时水分过多也不利于SEI膜的形成。但在痕量的水分难以除去的同时,痕量的水也可以一定程度上保证电芯的性能。可惜文武对这个方面的切身经验几乎为零,说不出太多的东西。大家有兴趣可以搜一搜论坛里面关于这个话题的资料,还是不少的。 涂布膜密度:单一变量的考虑膜密度对循环的影响几乎是一个不可能的任务。膜密度不一致要么带来容量的差异、要么是电芯卷绕或叠片层数的差异。对同型号同容量同材料的电芯而言,降低膜密度相当于增加一层或多层卷绕或叠片层数,对应增加的隔膜可以吸收更多的电解液以保证循环。考虑到更薄的膜密度可以增加电芯的倍率性能、极片及裸电芯的烘烤除水也会容易些,当然太薄的膜密度涂布时的误差可能更难控制,活性物质中的大颗粒也可能会对涂布、滚压造成负面影响,更多的层数意味着更多的箔材和隔膜,进而意味着更高的成本和更低的能量密度。所以,评估时也需要均衡考量。 负极过量:负极过量的原因除了需要考虑首次不可逆容量的影响和涂布膜密度偏差之外,对循环性能的影响也是一个考量。对于钴酸锂加石墨体系而言,负极石墨成为循环过程中的“短板”一方较为常见。若负极过量不充足,电芯可能在循环前并不析锂,但是循环几百次后正极结构变化甚微但是负极结构被破坏严重而无法完全接收正极提供的锂离子从而析锂,造成容量过早下降。 电解液量:电解液量不足对循环产生影响主要有三个原因,一是注液量不足,二是虽然注液量充足但是老化时间不够或者正负极由于压实过高等原因造成的浸液不充分,三是随着循环电芯内部电解液被消耗完毕。注液量不足和保液量不足文武之前写过《电解液缺失对电芯性能的影响》因而不再赘述。对第三点,正负极特别是负极与电解液的匹配性的微观表现为致密且稳定的SEI的形成,而右眼可见的表现,既为循环过程中电解液的消耗速度。不完整的SEI膜一方面无法有效阻止负极与电解液发生副反应从而消耗电解液,一方面在SEI膜有缺陷的部位会随着循环的进行而重新生成SEI膜从而消耗可逆锂源和电解液。不论是对循环成百甚至上千次的电芯还是对于几十次既跳水的电芯,若循环前电解液充足而循环后电解液已
校验、检定与校准 校验是不统一的或者笼统的质量名词,即有检验或复验,又是在无法确定是检定和校准时使用,同时也兼顾了自检和内校的意思。 据一些文件资料中规定:在没有检定规程时,应由企业编写校验方法进行校验。它与检定和校准均有一定联系又有明显区别。它不具有法制性与校准相同,它在技术操作内容上又与检定有共性,一般可进行校准,也可以对其它有关性能进行规定的检验,并最终给出合格性的结论。 因此,在学术界上还没有统一的解释和说法时,这个是有歧义的术语,我们在口语或书面语上尽量不要与检定校准混淆,最好区别开。 检定:由法制计量部门或法定授权组织按照检定规程,通过实验,提供证明来确定测量器具的示值误差满足规定要求的活动。它是查明和确认计量器具是否符合法定要求的程序。 检定范围主要指《中华人民工和国依法管理的计量器具目录》中强制检定的计量器具,目录内凡用于贸易结算、安全防护、医疗卫生、环境监测的,均实行强制检定;同时必须依据计量检定规程,必须给出计量器具合格与否的判定。 日常使用的计量器具有:长度(卡尺、千分尺、卷尺、直尺、百分表、塞尺、水平仪)、热学(温度计、热量计)、力学(砝码、天平、台秤、压力计、抗拉强度计、测力计)、电磁学(电压计、万用表、电流表)、时间频率器(秒表、计时器)、声学(听力计、声级计)、光学(白度计、色差计)、物理化学(电导仪、酸碱仪、分光光度计、色谱计)、标准物质(钢材、建材、化工成分分析标准物质)等。 校准:在规定条件下,为确定计量器具示值与对应的计量标准复现量值之间关系的一组操作。 校准范围主要指《中华人民共和国依法管理的计量器具目录》中规定非强制检定的计量器具。其标准依据优先选择国家校准规范,或根据计量检定规程或相关产品标准、使用说明书等技术文件编制校准技术条件。 校准报告只提供校准数据,比对校准数据或误差范围或给出与其示值偏离数据或曲线等,却不出合格结论,企业应规定使用要求以判定其是否合格,才能投入使用。 日常使用有:湿度计(测湿仪)、测厚规、测厚仪及其它的非强制检定计量器具等。 校准和检定的主要区别: 目的不同: 校准—自行确定监视及测量装置量值是否准确。属自下而上的量值溯源,评定示值误差。 检定—对计量特性进行强制性的全面评定。属量值统一,检定是否符合规定
第三章水动力学基础 1、渐变流与急变流均属非均匀流。( ) 2、急变流不可能是恒定流。( ) 3、总水头线沿流向可以上升,也可以下降。( ) 4、水力坡度就是单位长度流程上的水头损失。( ) 5、扩散管道中的水流一定是非恒定流。( ) 6、恒定流一定是均匀流,非恒定流一定是非均匀流。( ) 7、均匀流流场内的压强分布规律与静水压强分布规律相同。( ) 8、测管水头线沿程可以上升、可以下降也可不变。( ) 9、总流连续方程v1A1 = v2A2对恒定流和非恒定流均适用。( ) 10、渐变流过水断面上动水压强随水深的变化呈线性关系。( ) 11、水流总是从单位机械能大的断面流向单位机械能小的断面。( ) 12、恒定流中总水头线总是沿流程下降的,测压管水头线沿流程则可以上升、下降或水平。( ) 13、液流流线和迹线总是重合的。( ) 14、用毕托管测得的点流速是时均流速。( ) 15、测压管水头线可高于总水头线。( ) 16、管轴高程沿流向增大的等直径管道中的有压管流,其管轴压强沿流向增大。( ) 17、理想液体动中,任意点处各个方向的动水压强相等。( ) 18、恒定总流的能量方程z1 + p1/g + v12 /2g = z2 +p2/g + v22/2g +h w1- 2 ,式中各项代表( ) (1) 单位体积液体所具有的能量;(2) 单位质量液体所具有的能量; (3) 单位重量液体所具有的能量;(4) 以上答案都不对。 19、图示抽水机吸水管断面A─A动水压强随抽水机安装高度h的增大而( ) (3) 不变(4) 不定 h1与h2的关系为( ) (1) h>h(2) h<h(3) h1 = h2(4) 无法确定 ( ) (1) 测压管水头线可以上升也可以下降(2) 测压管水头线总是与总水头线相平行 (3) 测压管水头线沿程永远不会上升(4) 测压管水头线不可能低于管轴线 22、图示水流通过渐缩管流出,若容器水位保持不变,则管内水流属( ) (3) 恒定非均匀流(4) 非恒定非均匀流 ( ) (1) 逐渐升高(2) 逐渐降低(3) 与管轴线平行(4) 无法确定 24、均匀流的总水头线与测压管水头线的关系是( ) (1) 互相平行的直线;(2) 互相平行的曲线;(3) 互不平行的直线;(4) 互不平行的曲线。
关于无人机模拟操控技能实训的报告 目录 一、前言 1.实训背景与意义 (2) 2.无人机的发展现状 (2) 3、本次实训的任务安排与技术要求 (4) 二、实训的基本情况 (5) 三、实训总结 (8)
一.前言 本次实训主要是通过实体操控四旋翼无人机的不同姿态运动来提升自己对无人机的运动机制、动力原理以及飞行实操的了解。主要要求是使用提供的四旋翼无人机实现无人机在导航模式下实现原地360°旋转、矩形飞行以及固定翼的模拟航线飞行等,需要控制飞机高度方向,指导老师现场考核评分并记录好实训操控时的图像或音频,以完成实训总结报告。 1.实训背景与意义 无人机,是一种不需要有人驾驶,可以通过远程操控来实现某些特定功能的飞行器,具有可持续续航、飞行高度高、可携带外接设备等一系列优点,目前无人机在多个领域取得应用,并且经过行业的不断完善,已经形成初步的产业链。无人机以其自身的突出的优点、高性价比等巨大优势吸引人们的关注,并且在不断地研究中取得了一定的突破,从无人机整个行业的前景来看,无疑是值得肯定的,并且现有技术不断革新的情况下无人机在未来的发展将会越来越好,无人机作为现代的新星宠儿,对它的研究应用无论是对自身发展还是国家技术改革创新都具有很大作用,在无人机势如春笋的发展背景下,通过实训去了解无人机,熟练的操控无人机将对未来就业以及自身发展具有重大意义。 2.无人机的发展现状 20世纪90年代以来,随着信息化技术、轻量化/小型化任务载荷技术、卫星通信技术、复合材料结构技术、高效空气动力技术、新型能源与高效动力技术、起降技术的迅猛发展,无人机性能不断提升、功能不断扩展,各种类型和功能的无人机不断涌现,应用领域也越来越广泛。无人机按规模可分为微型无人机、小型无人机、中型无人机、大型无人机;按飞行高度可分为低空无人机、中空无人机、高空无人机、临近空间无人机;按飞行速度可分为低速无人机、高速无人机;按机动性可分为低机动无人机、高机动无人机;按能源与动力类型可分为螺旋桨式无人机、喷气式无人机、电动无人机、太阳能无人机、燃料电池无人机;按活动半径可分为近程无人机、短程无人机、中程无人机、远程无人机;按起降方式可分为滑跑起降无人机、火箭助推/伞降回收无人机、空投无人机、炮射无人机、潜射无人机等;按功能用途可分为靶标无人机、诱饵无人机、侦察无人机、炮兵校射无人机、电子对抗无人机、电子侦听无人机、心理战无人机、通信中继无人机、测绘无人机、攻击无人机、察打一体无人机、预警无人机…… 人机系统主要包括飞机机体、飞控系统、数据链系统、发射回收系统、电源系统等。飞控系统又称为飞行管理与控制系统,相当于无人机系统的“心脏”部分,对无人机的稳定性、数据传输的可靠性、精确度、实时性等都有重要影响,对其飞行性能起决定性的作用;数据链系统可以保证对遥控指令的准确传输,以及无人机接收、发送信息的实时性和可靠性,以保证信息反馈的及时有效性和顺利、准确的完成任务。发射回收系统保证无人机顺利升空以达到安全的高度和速度飞行,并在执行完任务后从天空安全回落到地面。 无人机主要分为多旋翼无人机、固定翼无人机以及组合式无人机三大类。 多旋翼无人机又有四旋翼、六旋翼、八旋翼甚至十旋翼等,最常见的是四旋翼无人机,以下是常见的多旋翼无人机。
分子动力学实验报告 实验名称平衡晶格常数和体弹模量 实验目的 1、学习Linux系统的指令 2、学习lammps脚本的形式和内容 实验原理 原子、离子或分子在三维空间做规则的排列,相同的部分具有直线周期平移的特点。为了描述晶体结构的周期性,人们提出了空间点阵的概念。为了说明点阵排列的规律和特点,可以在点阵中去除一个具有代表性的基本单元作为点阵的组成单元,称为晶胞。晶胞的大小一般是由晶格常数衡量的,它是表征晶体结构的一个重要基本参数。 在本次模拟实验中,给定Si集中典型立方晶体结构:fcc,bcc,sc,dc。根据 可判定dc结构是否能量最低,即是否最稳定 材料在弹性变形阶段,其应力和应变成正比例关系(即符合胡克定律),其比例系数称为弹性模量。弹性模量是描述物质弹性的一个物理量,是一个总称,包括杨氏模量、剪切模量、体积模量等。在弹性变形范围内,物体的体应力与相应体应变之比的绝对值称为体弹模量。表达式为 B=? dP dV V 式中,P为体应力或物体受到的各向均匀的压强,dV V为体积的相对变化。对于立方晶胞,总能量可以表示为ε=ME,E为单个原子的结合能,M 为单位晶胞内的原子数。晶胞体积可以表示为V=a3,那么压强P为 P=?dε dV =? M 3a2 dE da 故体积模量可以表示为 根据实验第一部分算出的平衡晶格常数,以及能量与晶格间距的函数关系,可以求得对应晶格类型的体积模量。并与现有数据进行对比。 实验过程 (1)平衡晶格常数
将share文件夹中关于第一次实验的文件夹拷贝到本地,其中包含势函数文件和input文件。 $ cp□-r□share/md_1□. $ cd□md_1 $ cd□1_lattice 通过LAMMPS执行in.diamond文件,得到输出文件,包括体系能量和cfg文件,log文件。 $ lmp□-i□in.diamond 用gnuplot画图软件利用输出数据作图,得到晶格长度与体系能量的关系,能量最低处对应的晶格长度即是晶格常数。 Si为diamond晶格结构时晶格长度与体系能量关系图如图, 由图可得能量最小处对应取a0=5.43095。 Si为fcc晶格结构时晶格长度与体系能量关系图如图, a0=4.15。 改写后的sc、bcc脚本文件分别如图所示
影响锂电池安全因素 锂离子电池作为可靠的能源已经广泛应用于小型电源驱动设备,但由于热稳定性引起的安全问题,其使用在大型电池特别是用于电动汽车(EV)和混合动力汽车(HEV)的动力锂离子电池方面受到限制。本文从锂离子电池材料和制作工艺两个方面分析影响锂离子电池安全性能的因素,并进一步分析锂离子电池组安全性的关键问题。关键词:锂离子电池;安全性能;热稳定性;影响因素 安全性能是锂离子电池,特别是锂离子动力电池所关心的焦点问题。锂离子电池与金属锂二次电池相比,在安全性能方面有了很大的提高,但在实际应用中仍然存在许多隐患。特别是用于电动汽车(EV)和混合动力汽车(HEV)的动力锂离子电池,其充放电电流大,散热条件差,导致电池内部温度升高[1,2]。根据P.H.Biensan 等[3]的研究证明:锂离子电池在滥用的条件下有可能达到使铝集流体熔化的高温(>700℃),从而导致电池出现冒烟、着火爆炸、乃至人员受伤等情况。因此,锂离子电池安全性能方面的研究,对扩大锂离子电池的商品化程度,保证使用过程中人员的安全是非常重要的。本文从锂离子电池材料和制作工艺两个方面分析影响锂离子电池安全性能的因素,并进一步分析锂离子电池组安全性的关键问题。 1 电池材料对锂离子电池安全性能的影响对锂离子电池的安全保护
通常采用专门的充电电路来控制充电过程,防止电池过充放,并在电池上设 置安全阀和热敏电阻[4]。这些方法都是在使用过程中通过外部手段来达到对电池的安全保护,防止滥用造成的安全问题,然而要从根本上解决锂离子电池的安全问题,还要从电池材料本身的安全性能出发。 1.1 负极材料的安全性 目前,商业化的锂离子电池多采用碳材料为负极,在充放电过程中,锂在碳颗粒中嵌入和脱出,从而减少锂枝晶形成的可能,提高电池的安全性,但这并不表示碳负极没有安全性问题。其影响锂离子电池安全性能因素表现在下列几个方面: (1) 嵌锂负极与电解液反应 随着温度的升高,嵌锂状态下的碳负极将首先与电解液发生放热反应,且生成易燃气体。因此,有机溶剂与碳负极不匹配可能使锂离子动力电池发生燃烧。电解液与嵌入负极中的锂会发生如下反应[5]: 2Li+C3H4O3(EC)→Li2CO3+C3H6 (1)