
Super-Resolution on Moving Objects using a
Polygon-Based Object Description
A.van Eekeren?K.Schutte?O.R.Oudegeest?L.J.van Vliet?
?TNO Defence,Security and Safety,
P.O.Box96864,2509JG,The Hague,The Netherlands
?Quantitative Imaging Group
Delft University of Technology
Lorentzweg1,2628CJ,Delft,The Netherlands
adam.vaneekeren@tno.nl klamer.schutte@tno.nl L.J.vanVliet@tudelft.nl Keywords:detection,moving object,polygon description,super-resolution,TOD
Abstract
Moving objects are often the most interesting parts in image sequences.When images from a camera are undersampled and the moving object is depicted small on the image plane,processing of the image sequence afterwards may help to improve the visibility/recog-nition of the object.This paper addresses this sub-ject and presents an approach which performs Super-Resolution(SR)speci?cally on small moving objects using a polygon-based object description.This ap-proach is not bound to a?nite pixel grid and has the advantage that less unknowns have to be estimated in the optimization process in comparison to a standard pixel-based SR algorithm.This paper describes the setup of the proposed polygon-based SR algorithm and shows its superior performance in comparison to a pixel-based SR algorithm.
1Introduction
Although the concept of Super-Resolution(SR)al-ready exists for more than20years[1],not much at-tention is given to a speci?c case:SR reconstruction on moving objects.In[2]we presented an algorithm which simultaneously performs SR on the foreground and background of a scene.Both are processed sepa-rately with a standard pixel-based SR algorithm.This algorithm works?ne if a moving object(foreground) is relatively large(the number of boundary pixels is small in comparison to the total number of object pix-els)and contains enough inner structure to permit pre-cise registration.However,if an object is small(the number of boundary pixels comprises more than?fty percent of the total number of object pixels)and the object itself contains hardly any internal structure,a standard pixel-based SR approach will fail.On one hand there is not enough gradient information to per-form a proper registration of the object and on the other hand a standard pixel-based SR approach makes an error across the object boundary(assuming a clut-tered background).This boundary region consists of so-called‘mixed pixels’,which contain partly in-formation from the object and partly from the back-ground.
To tackle the aforementioned problems we pro-pose to perform SR on small moving objects using a polygon-based object description.Assuming rigid objects with homogeneous intensity that move(con-stant speed and acceleration are assumed)along a known trajectory through the real world,a proper reg-istration is done by?tting a model trajectory through the object’s center of mass in each frame.The bound-ary of a moving object is modeled with a polygon de-scription.With this model a relation is obtained be-tween the position of the edges of the polygon and the estimated intensities of the mixed pixels.By minimiz-ing the model error between the measured intensities and the estimated intensities in a least squared error sense,which is similar to conventional pixel-based SR algorithms,a sub-pixel accurate polygon descrip-tion is obtained.
The paper is organized as follows.In Section2the setup of the proposed polygon-based SR algorithm is presented.Section3describes the TOD-based per-formance measurements of the polygon-based SR al-gorithm compared to a conventional pixel-based SR algorithm and it shows the results.In the last section conclusions are drawn.
2Algorithm
Our algorithm can be split up into three parts: 1)obtaining a background model and moving object detection,2)model-based trajectory?tting for ob-ject registration and3)obtaining a sub-pixel accurate polygon description by solving an inverse problem. The latter is the main part of the algorithm and will be explained?rst.
2.1Polygon description
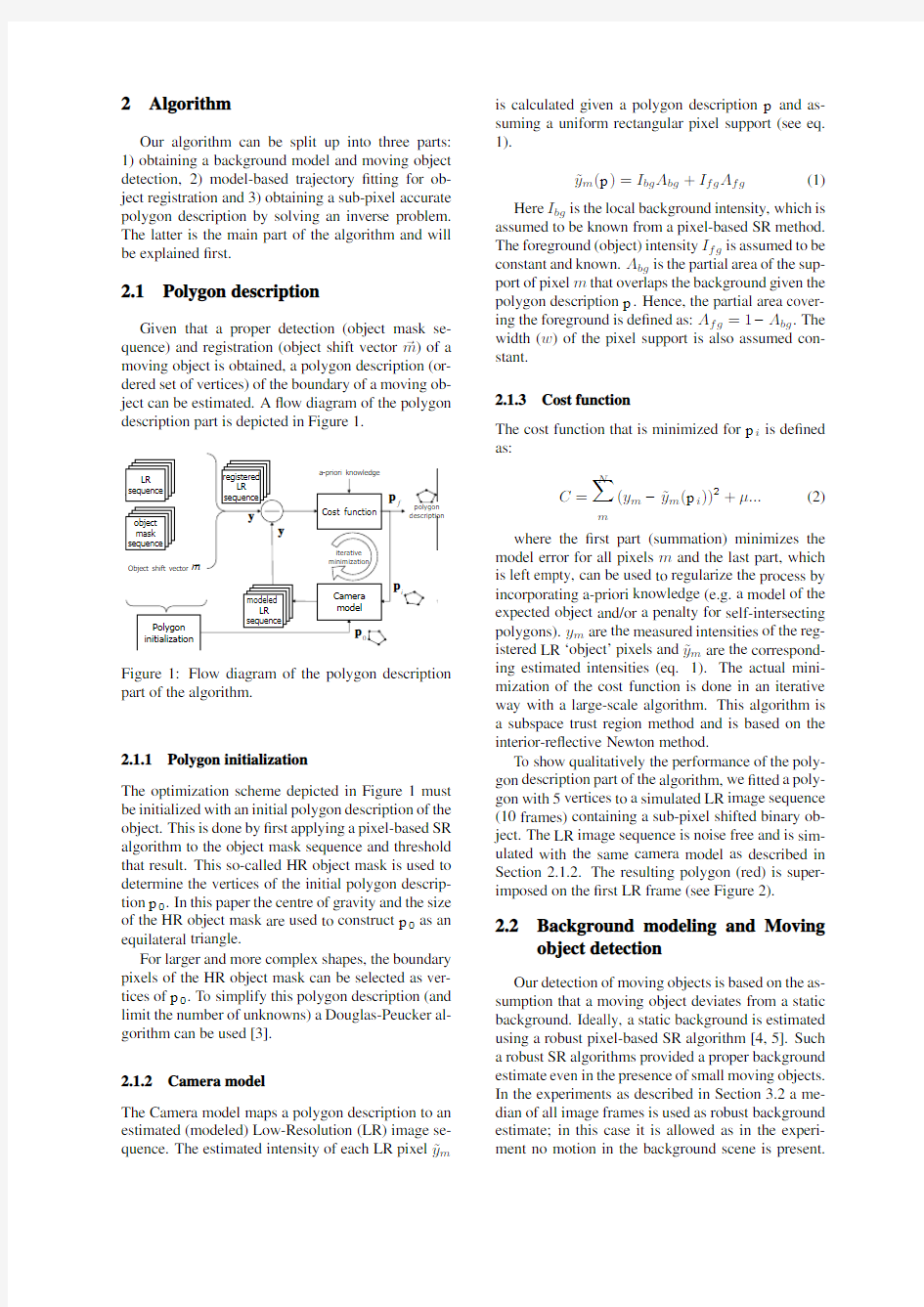
Given that a proper detection(object mask se-quence)and registration(object shift vector m)of a moving object is obtained,a polygon description(or-dered set of vertices)of the boundary of a moving ob-ject can be estimated.A?ow diagram of the polygon description part is depicted in Figure1.
Figure1:Flow diagram of the polygon description part of the algorithm.
2.1.1Polygon initialization
The optimization scheme depicted in Figure1must be initialized with an initial polygon description of the object.This is done by?rst applying a pixel-based SR algorithm to the object mask sequence and threshold that result.This so-called HR object mask is used to determine the vertices of the initial polygon descrip-tion p0.In this paper the centre of gravity and the size of the HR object mask are used to construct p0as an equilateral triangle.
For larger and more complex shapes,the boundary pixels of the HR object mask can be selected as ver-tices of p0.To simplify this polygon description(and limit the number of unknowns)a Douglas-Peucker al-gorithm can be used[3].
2.1.2Camera model
The Camera model maps a polygon description to an estimated(modeled)Low-Resolution(LR)image se-quence.The estimated intensity of each LR pixel?y m is calculated given a polygon description p and as-suming a uniform rectangular pixel support(see eq.
1).
?y m(p)=I bg A bg+I fg A fg(1) Here I bg is the local background intensity,which is assumed to be known from a pixel-based SR method. The foreground(object)intensity I fg is assumed to be constant and known.A bg is the partial area of the sup-port of pixel m that overlaps the background given the polygon description p.Hence,the partial area cover-ing the foreground is de?ned as:A fg=1?A bg.The width(w)of the pixel support is also assumed con-stant.
2.1.3Cost function
The cost function that is minimized for p i is de?ned as:
C=
N
m
(y m??y m(p i))2+μ (2)
where the?rst part(summation)minimizes the model error for all pixels m and the last part,which is left empty,can be used to regularize the process by incorporating a-priori knowledge(e.g.a model of the expected object and/or a penalty for self-intersecting polygons).y m are the measured intensities of the reg-istered LR‘object’pixels and?y m are the correspond-ing estimated intensities(eq.1).The actual mini-mization of the cost function is done in an iterative way with a large-scale algorithm.This algorithm is a subspace trust region method and is based on the interior-re?ective Newton method.
To show qualitatively the performance of the poly-gon description part of the algorithm,we?tted a poly-gon with5vertices to a simulated LR image sequence (10frames)containing a sub-pixel shifted binary ob-ject.The LR image sequence is noise free and is sim-ulated with the same camera model as described in Section2.1.2.The resulting polygon(red)is super-imposed on the?rst LR frame(see Figure2).
2.2Background modeling and Moving
object detection
Our detection of moving objects is based on the as-sumption that a moving object deviates from a static background.Ideally,a static background is estimated using a robust pixel-based SR algorithm[4,5].Such a robust SR algorithms provided a proper background estimate even in the presence of small moving objects. In the experiments as described in Section3.2a me-dian of all image frames is used as robust background estimate;in this case it is allowed as in the experi-ment no motion in the background scene is present.
Figure2:Polygon with5vertices?tted to undersam-pled data(10frames)of a binary object.The cyan points represent the ground-truth vertices used to sim-ulate the LR data.The green points are the vertices used as initialization(by hand)and the red points are the?nal vertices found with the proposed polygon-based SR algorithm.As a-priori knowledge is used that the polygon may not be self-intersecting and the angle between adjacent edges may not be smaller than 20degrees.
The HR background model,after shifting and down-sampling with a camera model,can be compared to each frame of the image sequence.After threshold-ing these difference images and removal of spurious detections with morphological operations,an object mask for each frame results.
2.3Registration
With the object masks,obtained from the detection part,a global position of the object in each frame is known.For performing SR however,a very precise sub-pixel registration is needed.When suf?cient in-ternal structure is present,gradient-based registration can be performed.In the setting of small moving ob-jects this is usually not the case and therefore another approach is needed.
Assuming that the contrast between object and background is suf?cient,in each frame the Center Of Gravity(COG)of the object is calculated.When the motion model of the moving object is known,such a model is?t in a robust way to the calculated COGs. We assume a linear motion model in the real world, which seems realistic given the setting of small mov-ing objects:the objects are far away from the observer (viewer)and will have a small displacement in the im-age plane due the high frame rate of today’s image sensors.When enough(>20)frames are available, a robust?t to the COGs results in a suf?cient precise and accurate sub-pixel registration of the moving ob-ject.
3Experiments
To test the performance of our polygon-based SR algorithm for moving objects,it is compared in a quantitative way with the performance of a well-performing pixel-based SR algorithm developed by Hardie[6,7].The performance is tested on simulated
data containing a small moving object on a cluttered background.
3.1Triangle Orientation Discrimination
The TOD method is an evaluation method de-signed for system performance of a broad range of imaging systems[8],but it can also be used to test the performance of image enhancement techniques[9].It is based on the observer task to discriminate four dif-ferent oriented equilateral triangles(see Figure
3). Figure3:The four different stimuli used in the TOD
method.
The observer task is a four-alternative forced-choice,so the observer has to indicate which of the four orientations is perceived,even if he is not sure. The probability of a correct observer response in-creases with the triangle size.For a number of ob-servations at different contrast(Signal-to-Noise Ra-tio)a75%correct triangle size is determined.These 75%correct triangle sizes correspond with the perfor-mance of the imaging system under measurement.
In our experiment an automatic observer is used that discriminates the orientation of the triangles after processing.Each triangle is compared with a database containing‘ideal’binary triangles(see Figure3)of different size.The orientation of the triangle that maximizes the similarity measure is taken as the re-sult.
3.2Comparison polygon versus pixel-
based approach
The setup of the experiment is depicted in Figure 4.
m
r
performance
measure pixel-
based SR
performance
description Figure4:Flow diagram of the comparison between a conventional pixel-based SR algorithm and the pro-posed polygon-based SR algorithm on moving ob-jects.The performance measure is obtained with the TOD method.
Here,the‘LR sequence triangle’is a simulated, under-sampled,image sequence containing a mov-ing triangle with homogeneous intensity.The LR
data is obtained from Hyper-Resolution(HYR)data, which has a17×higher resolution,through a sim-ulated camera model.This camera model simulates only the camera’s sensor with a100%?ll-factor.This is accomplished by blurring the HYR data with a uni-form rectangular?lter(width=17pixels)followed by down-sampling with factor17.Note that both the pixel-based SR algorithm as well as the polygon-based SR algorithm are implemented in such a way that no model errors are introduced.To be able to apply the TOD method,different LR sequences with various triangle sizes and SNR’s are simulated.An example of a HYR image and its corresponding LR image is depicted in Figure5.On both images the sub-pixel accurate polygon description as found by our SR algorithm is superimposed in
red.
(a)(b)
Figure5:(a)Part of original HYR image containing
a moving triangle of32pixels.(b)Corresponding LR
image(triangle size is here reduced to31/17=1.88
pixels).On both images the sub-pixel accurate poly-
gon description as found by our SR algorithm is su-
perimposed in red.
As is depicted in the upper part of Figure4,the
detected moving triangle data together with the mea-
sured object positions(y)is processed with a pixel-
based SR algorithm(Hardie).Afterwards the ori-
entation of the triangle is determined with the TOD
method.In the lower part of Figure4the data is
processed with the proposed polygon-based SR al-
gorithm,which allows us to use a-priori knowledge
about the object.The polygon-based method is tested
in two different modes:one using a lot of a-priori
knowledge and one using only a minimum amount
of a-priori knowledge.In the?rst mode the follow-
ing a-priori knowledge is assumed:the polygon must
match one of the four equilateral triangles as depicted
in Figure3.Therefore only the position and size of
the triangle have to be estimated(three degrees of
freedom(d.o.f.)).The functional that is minimized
for this mode is depicted in equation3.
C=
N
m
(y m??y m(p i))2+···
μ1(1?e?
P
j
(αj?α0)2/2σ2
α)(3)
Here,αj is the inner angle of polygon p i at ver-
tex j andα0is the preferred angle.σαexpresses
the steepness of the joint probability density function.
The value ofσαshould be seen in relation to the pre-
ferred angleα0.Differences in angle smaller than5-
10%should be allowed.In our experimentsα0=π/3
(equilateral triangle constraint)andσα=π/60are
used.Furthermore a?at prior is used for the angle
difference.
The second mode only assumes that a triangle
(three vertices)is present,which must have a mini-
mum angle(αmin)between its edges of45degrees.
In this case the positions of all three vertices have to
be estimated(six d.o.f.).The functional that is mini-
mized for this mode is de?ned as:
C=
N
m
(y m??y m(p i))2+···
μ2
P
j
s(?(αj?αmin)/s0)(4)
with
s(t)=
1
1+e?t
.(5)
s(t)is the sigmoid function,αmin denotes a soft
threshold on the vertex angleαj and s0controls the
steepness of the penalty function.Please note the
minus-sign in the argument of s,which limits the
penalty to angels smaller than the soft threshold.In
our experimentsαmin=π/4and s0=π/100are
used.In this mode also a?at prior is used for the
angle difference.
Furthermore,for both modes the foreground inten-
sity and the width of the pixel support(w=1LR
pixel)are assumed to be known.Also the initializa-
tion step is the same:according to the centre of mass
and the size of the HR object mask(see Section2.1.1)
four different oriented equilateral triangles are used
as initial polygon description p0.This is done to pre-
vent that the optimization process gets stuck in a local
minimum.The polygon description(p f)that results
in the smallest value of functional C is used for the
TOD measurement.The pose(up,right,down,left)
of the equilateral triangle that has a minimum area er-
ror with p f is taken as the TOD measure.
3.3Results
The results obtained from the comparison experi-
ment are depicted in Figure6.Note that a smaller tri-
angle75%threshold indicates a better performance.
The Signal-to-Noise Ratio(SNR)is de?ned here as
20log10(|ˉI bg?I fg|/σn),withˉI bg the mean intensity
of the local background,I fg the foreground intensity
andσn the standard deviation of the noise.
SNR (dB)
T r i a n g l e 75% t h r e s h o l d (L R p i x e l s )
Figure 6:TOD performance comparison between a polygon and a pixel-based approach on simulated data (effective uniform rectangular blur of 1LR pixel,40frames).Black line:Hardie,zoom 4,w =1,λ=10?4.Red line:polygon description with 3ver-tices using little a-priori knowledge,Blue line:poly-gon description with 3vertices using much a-priori knowledge.
4Conclusions
From the obtained results the following conclu-sions can be drawn:
?For high SNR’s the polygon-based SR algo-rithm with a-priori knowledge performs sig-ni?cantly better than a conventional well-performing pixel-based SR algorithm according to the TOD measure considering a small moving object on a cluttered background.?When using less a-priori knowledge the perfor-mance of our proposed algorithm decreases to a level,comparable to that of the conventional pixel-based SR approach.
?For low SNR’s the performance is comparable to the pixel-based SR algorithm.The tendency of the performance curves in Figure 6shows us that the pixel-based method seems to be performing better when SNR <15dB.
References
[1]R.Y .Tsai and T.S.Huang.Multiframe image
restoration and registration.In Advances in Com-puter Vision and Image Proscessing ,volume 1,pages 317–339.JAI Press,1984.[2]A.van Eekeren,K.Schutte,J.Dijk, D.J.J.
de Lange,and L.J.van Vliet.Super-resolution on moving objects and background.In Proc.13th International Conference on Image Processing ,volume 1,pages 2709–2712.IEEE,2006.
[3]D.Douglas and T.Peucker.Algorithms for the
reduction of the number of points required to rep-resent a digitized line or its caricature.The Cana-dian Cartographer ,2(10):112–122,1973.[4]S.Farsiu,M.D.Robinson,M.Elad,and https://www.doczj.com/doc/4311438836.html,an-far.Fast and robust multi-frame super resolution.IEEE Trans.Image Processing ,13(10):1327–1344,2004.[5]T.Q.Pham,L.J.van Vliet,and K.Schutte.Robust
fusion of irregularly sampled data using adaptive normalized convolution.EURASIP Journal on Applied Signal Processing ,pages 1–12,2006.[6]R.C.Hardie,K.J.Barnard,J.G.Bognar,E.Arm-strong,and E.A.Watson.High-resolution im-age reconstruction from a sequence of rotated and translated frames and its application to an infrared imaging system.Optical Engineering ,37(1):247–260,1998.[7]A.van Eekeren,K.Schutte,O.R.Oudegeest,and
L.J.van Vliet.Performance evaluation of super-resolution reconstruction methods on real-world data.Eurasip JASP ,Special Issue on Super-Resolution Enhancement of Digital Video ,2007(under review).[8]P.Bijl and J.M.Valeton.Triangle orientation dis-crimination:the alternative to minimum resolv-able temperature difference and minimum resolv-able contrast.Optical Engineering ,37(7):1976–1983,1998.[9]P.Bijl,K.Schutte,and M.Hogervorst.Applica-bility of tod,mtdp,mrt and dmrt for dynamic im-age enhancement techniques.In Infrared Imag-ing Systems XVII ,volume 6207,pages 154–165.SPIE,2006.
6.6.1 内容简介 SciFinder Scholar是美国化学学会所属的化学文摘服务社CAS(Chemical Abstract Service)出版的化学资料电子数据库学术版。它是全世界最大、最全面的化学和科学信息数据库。 《化学文摘》(CA)是涉及学科领域最广、收集文献类型最全、提供检索途径最多、部卷也最为庞大的一部著名的世界性检索工具。CA报道了世界上150多个国家、56种文字出版的20000多种科技期刊、科技报告、会议论文、学位论文、资料汇编、技术报告、新书及视听资料,摘录了世界范围约98%的化学化工文献,所报道的内容几乎涉及化学家感兴趣的所有领域。 CA网络版SciFinder Scholar,整合了Medline医学数据库、欧洲和美国等30几家专利机构的全文专利资料、以及化学文摘1907年至今的所有内容。涵盖的学科包括应用化学、化学工程、普通化学、物理、生物学、生命科学、医学、聚合体学、材料学、地质学、食品科学和农学等诸多领域。 SciFinder Scholar 收集由CAS 出版的数据库的内容以及MEDLINE?数据库,所有的记录都为英文(但如果MEDLINE 没有英文标题的则以出版的文字显示)。 6.6.2 通过 SciFinder Scholar 可以得到的信息:
6.6.3 SciFinder? Scholar? 使用的简单介绍 主要分为Explore 和Browse。如图6.6.1 一、Explore Explore Tool 可获取化学相关的所有信息及结构等,有如下: 1、Chemical Substance or Reaction – Retrieve the corresponding literature 2、By chemical structure 3、By substance identifier 4、By molecular formula
儿童歌谣大全 各位读友大家好,此文档由网络收集而来,欢迎您下载,谢谢 篇一:儿童歌谣歌词大全 [小螺号]儿歌歌词 小螺号,嘀嘀嘀吹海鸥听了展翅飞小螺号,嘀嘀嘀吹浪花听了笑微微小螺号,嘀嘀嘀吹 声声唤船归啰 小螺号,嘀嘀嘀吹 阿爸听了快快回啰。 茫茫的海洋,蓝蓝的海水 吹起了小螺号,心里美吔 [小鸟小鸟] 蓝天里有阳光,树林里有花香 小鸟小鸟,你自由地飞翔 在田野,在草地,在湖边,在山冈 小鸟小鸟迎着春天歌唱 啦啦啦啦啦。爱春天,爱阳光,爱湖水,爱花香小鸟小鸟,我的好朋友让我们一起飞翔歌唱
一起飞翔歌唱 啦啦啦啦啦 [让我们荡起双桨] 让我们荡起双桨,小船儿推开波浪海面倒映着白塔,四周环绕着绿树红墙小船儿轻轻飘荡在水中 迎面吹来了凉爽的风 红领巾迎着太阳,阳光洒在海面上 水中鱼儿望着我们 悄悄听我们愉快歌唱 小船儿轻轻飘荡在水中 迎面吹来了凉爽的风 做完了一天的功课,我们来尽情欢乐 我问你亲爱的伙伴 谁给我们安排下幸福的生活? 小船儿轻轻飘荡在谁中 迎面吹来了凉爽的风 [小红花]儿歌歌词 金波词尚疾曲 花园里,篱笆下,我种下一朵小红花
春天的太阳当头照,春天的小雨沙沙下 啦啦啦啦啦,啦啦啦啦啦 小红花张嘴笑哈哈 花园里,篱笆下,我种下一朵小红花 春天的太阳当头照,春天的小雨沙沙下 啦啦啦啦啦,啦啦啦啦啦 小红花张嘴笑哈哈[我家几口] 金苗苓词曲我家有几口? 让我扳指头 爸爸,妈妈,还有我 再加一个布娃娃 哟!有四口我家有几口? 让我扳指头 爸爸,妈妈,还有我 再加一个布娃娃 哟!有四口 [谁会这样] 少数民族儿歌潘振声曲 谁会飞呀,鸟会飞
鸟儿鸟儿怎样飞? 拍拍翅膀飞呀飞 谁会游呀,鱼会游 鱼儿鱼儿怎样游? 摇摇尾巴点点头 谁会跑呀,马会跑马儿马儿怎样跑?四脚离地身不摇。[我叫轻轻] 张友珊词汪玲曲 走路轻轻轻轻 上夜班的阿姨还没醒呀 敲门轻轻轻轻 给邻居叔叔送呀送封信 说话轻轻轻轻 姐姐灯下看书多用心呀 大家夸我是好孩子 给我取个名字叫呀叫轻轻 走路轻轻轻轻 上夜班的阿姨还没醒呀 敲门轻轻轻轻 给邻居叔叔送呀送封信 说话轻轻轻轻 姐姐灯下看书多用心呀
《樱桃小丸子》 小小年纪谈起理想一串串 想当专家、想做博士、想出唱片老爸老妈老师老友都夸赞 想来容易,说来简单,做做就难要数一百,先数一二三 要过明天先过好今天 瞄准目标看齐 噼里啪啦,噼里啪啦 做事不偷懒 噼里啪啦,噼里啪啦
学习不怕难 我们脚踏实地地干 瞄准目标看齐 噼里啪啦,噼里啪啦 读书真勤快 噼里啪啦,噼里啪啦 今天学得好 噼里啪啦,噼里啪啦 明天理想能实现 《多啦A梦》 如果我有仙女棒变大变小变漂亮
还要变个都是漫画巧克力和玩具的家 如果我有机器猫我要叫他小叮当 竹蜻蜓和时光隧道能去任何的地方 让小孩大人坏人都变成好人 (hi 大家好,我是小叮当) ang ang ang小叮当帮我实现所有的愿望 躺在草地上幻想想动想西想玩耍 想到老师还有考试一个头就变成两个大好在我有小叮当困难时候求求他 万能笔和时间机器能做任何的事情 让我的好朋友一齐分享他 (啊!救命啊!有老鼠!) ang ang ang 小叮当帮我实现所有的愿望 躺在草地上幻想想动想西想玩耍 想到老师还有考试一个头就变成两个大好在我有小叮当困难时候求求他 万能笔和时间机器能做任何的事情 让我的好朋友一齐分享他 (小叮当永远是你们的好朋友喔!) ang ang ang 小叮当帮我实现所有的愿望
ang ang ang 小叮当帮我实现所有的愿望 《铁臂阿童木》 越过辽阔天空,啦啦啦飞向遥远群星,来吧!阿童木,爱科学的好少年。善良勇敢的啦啦啦铁臂阿童木,十万马力七大神力,无私无畏的阿童木。穿过广阔大地,啦啦啦潜入深深海洋,来吧!阿童木,爱和平的好少年。善良勇敢的啦啦啦铁臂阿童木,我们的好朋友啊, 无私无畏的阿童木。 《小龙人之歌》 天上有,无数颗星星,那颗最小的就是我,我不知道我从哪里来,也不知道我在哪里生。地上有,无数个龙人,那个最小的就是我,我不知道我从哪里来,也不知道我在哪里生。啊----这是我将在妈妈怀 抱里,啊寻遍天涯,去找他 《我是一条小青龙》我头上有只角,我身后有尾巴,谁也不知道,我有多少秘密?我头上有只角,我身后有尾巴,谁也不知道,我有多少秘密。我是一条小青龙(小青龙,小青龙)我有许多小秘密(小秘
56首经典儿歌歌词大全 1、做早操 早上空气真叫好,我们都来做早操。 伸伸臂,弯弯腰,踢踢腿,蹦蹦跳,天天锻炼身体好。 2、饭前要洗手 小脸盆,水清请,小朋友们笑盈盈,小手儿,伸出来, 洗一洗,白又净,吃饭前,先洗手,讲卫生,不得病。 3、小手绢 小手绢,四方方,天天带在我身上。 又擦鼻涕又擦汗,干干净净真好看。 4、搬鸡蛋 小老鼠,搬鸡蛋,鸡蛋太大怎么办?一只老鼠地上躺, 紧紧抱住大鸡蛋。一只老鼠拉尾巴,拉呀拉呀拉回家。 5、大骆驼 骆驼骆驼志气大,风吹日晒都不怕。 走沙漠,运盐巴,再苦再累不讲话。 6、螳螂 螳螂哥,螳螂哥,肚儿大,吃得多。飞飞能把粉蝶捕, 跳跳能把蝗虫捉。两把大刀舞起来,一只害虫不放过 7、大蜻蜓 大蜻蜓,绿眼睛,一对眼睛亮晶晶, 飞一飞,停一停,飞来飞去捉蚊蝇。 8、小鸭子 小鸭子,一身黄,扁扁嘴巴红脚掌。 嘎嘎嘎嘎高声唱,一摇一摆下池塘。 9、拍手歌 你拍一,我拍一,天天早起练身体。 你拍二,我拍二,天天都要带手绢。 你拍三,我拍三,洗澡以后换衬衫。 你拍四,我拍四,消灭苍蝇和蚊子。 你拍五,我拍五,有痰不要随地吐。 你拍六,我拍六,瓜皮果核不乱丢。 你拍七,我拍七,吃饭细嚼别着急。 你拍八,我拍八,勤剪指甲常刷牙。 你拍九,我拍九,吃饭以前要洗手。
你拍十,我拍十,脏的东西不要吃。 10 、小螃蟹 小螃蟹,真骄傲,横着身子到处跑, 吓跑鱼,撞倒虾,一点也不懂礼貌 11 、庆六一 儿童节,是六一,小朋友们真欢喜。 又唱歌来又跳舞,高高兴兴庆六一。 12、花猫照镜子 小花猫,喵喵叫,不洗脸,把镜照, 左边照,右边照,埋怨镜子脏,气得胡子翘。 13、蚂蚁搬虫虫 小蚂蚁,搬虫虫,一个搬,搬不动,两个搬,掀条缝, 三个搬,动一动,四个五个六七个,大家一起搬进洞。 14、小青蛙 小青蛙,呱呱呱,水里游,岸上爬, 吃害虫,保庄稼,人人都要保护它。 15、花儿好看我不摘 公园里,花儿开,红的红,白的白, 花儿好看我不摘,人人都说我真乖。 16 、红绿灯 大马路,宽又宽,警察叔叔站中间, 红灯亮,停一停,绿灯亮,往前行。 17 、七个果果 一二三四五六七,七六五四三二一。 七个阿姨来摘果,七个篮子手中提。七个果子摆七样。 苹果、桃儿、石榴、柿子、李子、栗子、梨。 18、睡午觉 枕头放放平,花被盖盖好。 小枕头,小花被,跟我一起睡午觉,看谁先睡着。 19 、吃荸荠 荸荠有皮,皮上有泥。洗掉荸荠皮上的泥,削去荸荠外面的皮,荸荠没了皮和泥,干干净净吃荸荠。 20 、小云骑牛去打油 小云骑牛去打油,遇着小友踢皮球,皮球飞来吓了牛,摔下小云撒了油。 21 、盆和瓶 车上有个盆,盆里有个瓶,乒乒乒,乓乓乓,不知是瓶碰盆,还是盆碰瓶。
SciFinder使用说明 SciFinder简介 SciFinder?由美国化学会(American Chemical Society, ACS)旗下的美国化学文摘社(Chemical Abstracts Service, CAS)出品,是一个研发应用平台,提供全球最大、最权威的化学及相关学科文献、物质和反应信息。SciFinder涵盖了化学及相关领域如化学、生物、医药、工程、农学、物理等多学科、跨学科的科技信息。SciFinder收录的文献类型包括期刊、专利、会议论文、学位论文、图书、技术报告、评论和网络资源等。 通过SciFinder,可以: ?访问由CAS全球科学家构建的全球最大并每日更新的化学物质、反应、专利和期刊数据库,帮助您做出更加明智的决策。 ?获取一系列检索和筛选选项,便于检索、筛选、分析和规划,迅速获得您研究所需的最佳结果,从而节省宝贵的研究时间。 无需担心遗漏关键研究信息,SciFinder收录所有已公开披露、高质量且来自可靠信息源的信息。 通过SciFinder可以获得、检索以下数据库信息:CAplus SM(文献数据库)、CAS REGISTRY SM (物质信息数据库)、CASREACT? (化学反应数据库)、MARPAT?(马库什结构专利信息数据库)、CHEMLIST? (管控化学品信息数据库)、CHEMCATS?(化学品商业信息数据库)、MEDLINE?(美国国家医学图书馆数据库)。 专利工作流程解决方案PatentPak TM已在SciFinder上线,帮助用户在专利全文中快速定位难以查找的化学信息。 SciFinder 注册须知: 读者在使用SciFinder之前必须用学校的email邮箱地址注册,注册后系统将自动发送一个链接到您所填写的email邮箱中,激活此链接即可完成注册。参考“SciFinder注册说明”。
舌尖上的中国分集简介 第一集自然的馈赠 本集导入作为一个美食家,食物的美妙味感固然值得玩味,但是食物是从哪里来的?毫无疑问,我们从大自然中获得所有的食物,在我们走进厨房,走向餐桌之前,先让我们回归自然,看看她给我们的最初的馈赠。本集将选取生活在中国境内截然不同的地理环境(如海洋,草原,山林,盆地,湖泊)中的具有代表性的个人、家庭和群落为故事主角,以及由于自然环境的巨大差异(如干旱,潮湿,酷热,严寒)所带来的截然不同的饮食习惯和生活方式为故事背景,展现大自然是以怎样不同的方式赋予中国人食物,我们又是如何与自然和谐相处,从而了解在世代相传的传统生活方式中,通过各种不同的途径获取食物的故事。 美食介绍 烤松茸油焖春笋雪菜冬笋豆腐汤 腊味飘香腌笃鲜排骨莲藕汤椒盐藕夹酸辣藕丁煎焖鱼头泡饼煎焗马鲛鱼酸菜鱼松鼠桂鱼侉炖鱼本集部分旁白中国拥有世界上最富戏剧性的自然景观,高原, 第一集: 自然的馈赠 山林,湖泊,海岸线。这种地理跨度有助于物种的形成和保存,任何一个国家都没有这样多潜在的食物原材料。为了得到这份自然的馈赠,人们采集,捡拾,挖掘,捕捞。穿越四季,本集将展现美味背后人和自然的故事。香格里拉,松树和栎树自然杂交林中,卓玛寻找着一种精灵般的食物——松茸。松茸保鲜期只有短短的两天,商人们以最快的速度对松茸进行精致的加工,这样一只松茸24小时之后就会出现在东京的市场中。松茸产地的凌晨3点,单珍卓玛和妈妈坐着爸爸开的摩托车出发。穿过村庄,母女俩要步行走进30公里之外的原始森林。雨让各种野生菌疯长,但每一个藏民都有识别松茸的慧眼。松茸出土后,
卓玛立刻用地上的松针把菌坑掩盖好,只有这样,菌丝才可以不被破坏,为了延续自然的馈赠,藏民们小心翼翼地遵守着山林的规矩。为期两个月的松茸季节,卓玛和妈妈挣到了5000元,这个收入是对她们辛苦付出的回报。 舌尖上的中国DVD 老包是浙江人,他的毛竹林里,长出过遂昌最大的一个冬笋。冬笋藏在土层的下面,从竹林的表面上看,什么也没有,老包只需要看一下竹梢的叶子颜色,就能知道笋的准确位置,这完全有赖于他丰富的经验。笋的保鲜从来都是个很大的麻烦,笋只是一个芽,是整个植物机体活动最旺盛的部分。聪明的老包保护冬笋的方法很简单,扒开松松的泥土,把笋重新埋起来,保湿,这样的埋藏方式就地利用自然,可以保鲜两周以上。在中国的四大菜系里,都能见到冬笋。厨师偏爱它,也是因为笋的材质单纯,极易吸收配搭食物的滋味。老包正用冬笋制作一道家常笋汤,腌笃鲜主角本来应该是春笋,但是老包却使用价格高出20倍的遂昌冬笋。因为在老包眼里,这些不过是自家毛竹林里的一个小菜而已。在云南大理北部山区,醒目的红色砂岩中间,散布着不少天然的盐井,这些盐成就了云南山里人特殊的美味。老黄和他的儿子在树江小溪边搭建一个炉灶,土灶每年冬天的工作就是熬盐。云龙县的冬季市场,老黄和儿子赶到集市上挑选制作火腿的猪肉,火腿的腌制在老屋的院子里开始。诺邓火腿的腌制过程很简单,老黄把多余的皮肉去除,加工成一个圆润的火腿,洒上白酒除菌,再把自制的诺盐均匀的抹上,不施锥针,只用揉、压,以免破坏纤维。即使用现代的标准来判断,诺邓井盐仍然是食盐中的极品,虽然在这个古老的产盐地,盐业生产已经停止,但我们仍然相信诺邓盐是自然赐给山里人的一个珍贵礼物。圣武和茂荣是兄弟俩,每年9月,他们都会来到湖北的嘉鱼县,来采挖一种自然的美味。这种植物生长在湖水下面的深深的淤泥之中,茂荣挖到的植物的根茎叫做莲藕,是一种湖泊中高产的蔬菜——藕。作为职业挖藕人,每年茂荣和圣武要只身出门7个月,采藕的季节,他们就从老家安徽赶到有藕的地方。较高的人工报酬使得圣武和茂荣愿意从事这个艰苦的工作。挖藕的人喜欢天气寒冷,这不是因为天冷好挖藕,而是天气冷买藕吃藕汤的人就多一些,藕的价格就会涨。整整一湖的莲藕还要采摘5个月的时间,在嘉鱼县的珍湖上,300个职业挖藕人,每天从日出延续到日落,在中国遍布淡水湖的大省,这样场面年年上演。今天当我们有权远离自然,享受美食的时候,最应该感谢的是这些通过劳动和智慧成就餐桌美味的人们。 第二集主食的故事 本集导入主食是餐桌上的主要食物,是人们所需能量的主要来源。从远古时代赖以充饥的自然谷物到如今人们餐桌上丰盛的、让人垂涎欲滴的美食,一个异彩纷呈、变化多端的主食世界呈现在你面前。本集着重描绘不同地域、不同民族、不同风貌的有关主食的故事,展现人们对主食的样貌、口感的追求,处理和加工主食的智慧,以及中国人对主食的深
幼儿儿歌歌词大全 1、小白兔 小白兔乖乖,把门开开,快点开开,我要进来,不开不开就不开,妈妈没回来,谁叫也不开。小白兔乖乖,把门开开,妈妈回来,我要进来,快开快开快快开,妈妈回来了,我来把门开。 2、小花狗 小花狗,真叫脏,不洗脚丫就上床。问它为什么?它说忘,忘,忘! 3、吃饭 小宝宝,坐坐好,妈妈盛饭喂宝宝。细细嚼,慢慢咽,宝宝吃得直叫好。 4、干净 鼻涕擦干净,指甲剪干净,脸儿洗干净,妈妈和和亲一亲。 5、乒乓球 乒乓球,两人打,他给我,我给他,谁都不愿落在自己家. 6、踢毽子 小毽子,小毽子,飞上天, 落下地,我们都来踢踢它,踢不好儿没关系. 7、走夜路 夜色黑,星星闪,小朋友,把家还,突然窜出一只兔,吓得它,满处窜. 8、小盒子 小盒子,作用大,铅笔橡皮装的下, 还有一支小钢笔,装在里面心欢喜, 9、大马路 马路长又宽,我站在中间, 老师过来拜拜手,让我赶快走,说是有危险. 10、木头人
三三三,我们都是木头人, 不许哭来不许笑,还有一个不许动。 11、小皮球,小小篮,落地开花二十一,二五六,二五七, 二八二九三十一;三五六,三五七,三八三九四十一…… 12、小蜜蜂 小蜜蜂,嗡嗡嗡,嗡嗡嗡,大家一起勤劳动, 来匆匆,去匆匆,走得兴味浓,春暖花开不做工, 将来哪里好过冬?嗡嗡嗡,嗡嗡嗡,不学懒惰虫。 13、请你唱个歌吧 小杜鹃,小杜鹃,我们请你唱个歌,快来呀,大家来呀, 我们静听你的歌,咕咕!咕咕!歌声使我们快乐 14、谁会飞 谁会飞呀,鸟会飞,鸟儿鸟儿怎样飞?拍拍翅膀飞呀飞 谁会游呀,鱼会游,鱼儿鱼儿怎样游?摇摇尾巴点点头 谁会跑呀,马会跑,马儿马儿怎样跑?四脚离地身不摇。 15、好朋友 你帮我来梳梳头,我帮你来扣纽扣 团结友爱手拉手,我们都是好朋友 嘿嘿! 16、数鸭子 门前大桥下,游过一群鸭, 快来快来数一数,二四六七八。 17、小雪花 小雪花,小雪花,飘在空中像朵花,小雪花,小雪花 飘在窗上变窗花,小雪花,小雪花,飘在手上不见了
《舌尖上的中国》解说词 第一集《自然的馈赠》 中国拥有世界上最富戏剧性的自然景观,高原,山林,湖泊,海岸线。这种地理跨度有助于物种的形成和保存,任何一个国家都没有这样多潜在的食物原材料。为了得到这份自然的馈赠,人们采集,捡拾,挖掘,捕捞。穿越四季,本集将展现美味背后人和自然的故事。 香格里拉,松树和栎树自然杂交林中,卓玛寻找着一种精灵般的食物——松茸。松茸保鲜期只有短短的两天,商人们以最快的速度对松茸的进行精致的加工,这样一只松茸24小时之后就会出现在东京的市场中。 松茸产地的凌晨3点,单珍卓玛和妈妈坐着爸爸开的摩托车出发。穿过村庄,母女俩要步行走进30公里之外的原始森林。雨让各种野生菌疯长,但每一个藏民都有识别松茸的慧眼。松茸出土后,卓玛立刻用地上的松针把菌坑掩盖好,只有这样,菌丝才可以不被破坏,为了延续自然的馈赠,藏民们小心翼翼地遵守着山林的规矩。 为期两个月的松茸季节,卓玛和妈妈挣到了5000元,这个收入是对她们辛苦付出的回报。 老包是浙江人,他的毛竹林里,长出过遂昌最大的一个冬笋。冬笋藏在土层的下面,从竹林的表面上看,什么也没有,老包只需要看一下竹梢的叶子颜色,就能知道笋的准确位置,这完全有赖于他丰富的经验。 笋的保鲜从来都是个很大的麻烦,笋只是一个芽,是整个植物机体活动最旺盛的部分。聪明的老包保护冬笋的方法很简单,扒开松松的泥土,把笋重新埋起来,保湿,这样的埋藏方式就地利用自然,可以保鲜两周以上。 在中国的四大菜系里,都能见到冬笋。厨师偏爱它,也是因为笋的材质单纯,极易吸收配搭食物的滋味。老包正用冬笋制作一道家常笋汤,腌笃鲜主角本来应该是春笋,但是老包却使用价格高出20倍的遂昌冬笋。因为在老包眼里,这些不过是自家毛竹林里的一个小菜而已。 在云南大理北部山区,醒目的红色砂岩中间,散布着不少天然的盐井,这些盐成就了云南山里人特殊的美味。老黄和他的儿子树江小溪边搭建一个炉灶,土灶每年冬天的工作就是熬盐。 云龙县的冬季市场,老黄和儿子赶到集市上挑选制作火腿的猪肉,火腿的腌制在老屋的院子里开始。诺邓火腿的腌制过程很简单,老黄把多余的皮肉去除,加工成一个圆润的火腿,洒上白酒除菌,再把自制的诺盐均匀的抹上,不施锥针,只用揉、压,以免破坏纤维。 即使用现代的标准来判断,诺邓井盐仍然是食盐中的极品,虽然在这个古老的产盐地,盐业生产已经停止,但我们仍然相信诺邓盐是自然赐给山里人的一个珍贵礼物。 圣武和茂荣是兄弟俩,每年9月,他们都会来到湖北的嘉鱼县,来采挖一种自然的美味。这种植物生长在湖水下面的深深的淤泥之中,茂荣挖到的植物的根茎叫做莲藕,是一种湖泊中高产的蔬菜——藕。
浙江大学scifinder使用教程 1、输入网址:https://www.doczj.com/doc/4311438836.html,/ 如图1,点击继续浏览 图1 2、进入浙大的入口,输入用户名密码(卖家提供) 图2 3、登陆进去是图3这个页面。注意此时会自动安装插件,切记要一路放行。登陆成功的标志是屏幕右上角有个蓝框绿蓝S的LOGO! 如果未出现S,那么请根据图2的手动安装组件,下载安装组件!
图3 4、登陆页面不要覆盖,新标签页打开浙江大学图书馆 https://www.doczj.com/doc/4311438836.html,/libweb/点数据库导航,找到scifinder页面,进入 图4
5、点击图5红框中的链接https://www.doczj.com/doc/4311438836.html,/cgi-bin/casip,看下IP是不是浙大的IP,一般是61或者210开头,确定是,那就可以输入链接https://https://www.doczj.com/doc/4311438836.html,/登陆了 图5 6、scifinder登陆页面输入用户名密码(卖家提供),您就可以使用scifinder啦 图6
常见问题以及解决方法 1.浏览器不支持JavaScript,提示“您的浏览器不支持JavaScript(或它被 禁止了)请确认您的浏览器能支持JavaScript”,请启用“工具- >Internet选项->安全->自定义级别->活动脚本”选项。 2.浏览器不支持Cookie,提示“你的浏览器禁止了Cookie,必须设置为允许 才可以继续使用”,请在“工具->Internet选项->隐私->高级”启用 Cookie支持 3.浏览不支持BHO,提示:"您的浏览器没有启用第三方扩展",关闭IE时无法 自动注销用户。请在 "工具->Internet选项->高级->启用第三方浏览器扩展”前打勾启用! 4.APP服务不可用,可能是控件不是最新的,请您关闭IE,重新登陆VPN 5.IP服务不可用,可能你安装的IP服务控件不是最新的。请点击“程序- >SINFOR SSL VPN->卸载CS应用支持”和“程序->SINFOR SSL VPN->卸载SSL VNIC”,手动卸载IP服务控件,然后再重新登陆VPN。 6.IP服务可能与某些杀毒软件冲突。请在杀毒软件中放行IP服务的客户端程 序,或者在使用时暂时禁用杀毒软件。
《舌尖上的中国》电视节目策划书 一、背景浅析 改革开放以来,国人物质生活更加富足,在吃方面也变得更加讲究。食客、美食家、吃货等的出现,则从另一方面体现国人口味的变化。衣食住行为人之根本,古人读万卷书、行万里路已是满足,今人在此之外加上品万种美食,才称得上是真正的享受生活。而中国幅员辽阔,有八大菜系,淮扬菜、粤菜、鲁菜、湘菜,每种菜系都有其特色美食,而且烹调方法各有不同,可以说,国人够有口福的了。在《舌尖上的中国》这部纪录片中,导演和摄制组带着观众探访祖国各地美食,了解各式各样与美食有关的人和事,总共七集、每集50分钟的容量,节奏紧凑、制作精良,尝遍美食的同时又能遍览祖国风物,纪录片煞是好。而随着中国经济的飞速发展,人们的物质生活水平也得到了极大地提高,已经不再局限于吃饱穿暖这样基本的要求。民以食为天,在物质文明丰富至如斯的今天,人们开始重视对于生活品质更高层次的追求。对于吃,食不厌精、烩不厌细,不只吃味道,还要吃环境、吃服务、吃文化,吃健康。 二、企划动机 《舌尖上的中国》这部以美食为主题的纪录片,前些日子风头力压各种电视连续剧,成为连日来的微博“刷屏利器”并高居话题榜榜首,甚至让许多早已抛弃了电视的80后“吃货”们,纷纷锁定夜间的央视坐等这部“吃货指南”。人们为美食流口水,为美食的故事流眼泪,为美食的文化而感动自豪,自豪于中国饮食文化的博大精深,甚至有人高调地赞美“这才是最好的爱国主义教育片”。看要应对新的发展形势,就必须有新的态度与措施。饮食行业发展到今日,大街小巷、五花八门,各种价位、各种地域乃至跨国界的美食比比皆是。如何从
千篇一律的店面经营中脱颖而出?不仅仅是商家绞尽脑汁,着力打开销售额与知名度。美食老饕们也寻寻觅觅,力图享受到有特色、有内涵的精彩美食。《舌尖上的中国》这档美食资讯节目,是继《舌尖上的中国》这个记录片之后的后续美食资讯类节目,更实现其为商家和消费者两者搭建一个交流的平台,优秀的商家可以尽展己之所长,以此为基础展示自身特色美食功夫。而美食爱好者们则可以通过节目的推介,节省大量的时间、精力,接触到平时踏破铁鞋无觅处,只能通过口口相传难辨优劣,隐藏在街头巷尾的各种美食。大可以凭此慕名而来、亦可尽兴而去。 一、节目名称——《舌尖上的中国》 二、节目类别——继纪录片《舌尖上的中国》之后,观众参与度高的一档各地美食资讯节目 三、节目主旨——让爱美食的人走进节目让看节目的人走近美食 四、节目目标 借助最近《舌尖上的中国》的热点,重点打造一档精品的美食资讯节目,不仅仅做美食,还囊括了相关的综合资讯。力图达到“美食主动靠过来,观众自然看进去”的效果,打造口碑,铸就精品。 五、节目定位 这是一档集继纪录片《舌尖上的中国》之后的观众参与度高的一档各地美食资讯节目。将美食推介节目与菜肴烹饪节目于一身,力图更好的开发各地特色美食资源的服务资讯类美食节目,兼顾一定的娱乐性质。采用立体全面的推介方式,为现场和电视机前的观众提供优质精选的美食信息,商家现场展示、与美食爱好者们现场沟通交流。
《一闪一闪亮晶晶》 一闪一闪亮晶晶。漫天都是小星星。挂在天空放光明。好像千万小眼睛。太阳慢慢向西沉。乌鸦回家一群群。星星眨着小眼睛。光辉照耀到天明。一闪一闪亮晶晶。满天都是小星星。 《春天在哪里》 春天在哪里呀。春天在哪里。春天在那青翠的山林里。这里有红花呀这里有绿草。还有那会唱歌的小黄鹂。嘀哩哩嘀哩嘀哩哩。嘀哩哩嘀哩嘀哩哩。春天在青翠的山林里。还有那会唱歌的小黄鹂。春天在哪里呀。春天在哪里。春天在那湖水的倒影里。映出红的花呀映出绿的草。还有那会唱歌的小黄鹂。 《卖报歌》 卖报歌。啦啦啦,啦啦啦,我是卖报的小行家,不等天明去等派报,一面走一面叫,今天的新闻真正好,七个铜板就买两份报。啦啦啦,啦啦啦,我是卖报的小行家,大风大雨里满街跑,走不好滑一跤,满身的泥水惹人笑,饥饿寒冷只有我知道。 《两只老虎》 两只老虎。两只老虎。跑的块跑的快。一只没有耳朵。一只没有尾巴。真奇怪。真奇怪。两只老虎。两只老虎。跑的块跑的快。一只没有鼻子。一只没有头发。真奇怪。真奇怪。 《葫芦娃》 葫芦娃葫芦娃。一根藤上七朵花。风吹雨打都不怕。啦啦啦啦。叮当咚咚当当。葫芦娃。叮当咚咚当当。本领大啦啦啦啦。葫芦娃葫芦娃。本领大。葫芦娃葫芦娃。一根藤上七朵花。风吹雨打都不怕。啦啦啦啦。叮当咚咚当当。葫芦娃。叮当咚咚当当。本领大啦啦啦啦。 《歌声与微笑》 请把我的歌带回你的家。请把你的微笑留下。请把我的歌带回你的家。请把你的微笑留下。明天明天这歌声飞遍海角天涯。飞遍海角天涯。明天明天这微笑将是遍野春花。将是遍野春花。 《小螺号》 小螺号嘀嘀嘀吹。海鸥听了展翅飞。小螺号嘀嘀嘀吹。浪花听了笑微微。小螺号嘀嘀嘀吹。声声唤船归啰。小螺号嘀嘀嘀吹。阿爸听了快快回啰。茫茫的海滩。蓝蓝的海水。吹起了螺号。心里美吔。 《小毛驴》 我有一只小毛驴我从来也不骑。有一天我心血来潮骑着去赶集。我手里拿着小皮鞭我心里正得意。不知怎么哗拉拉拉拉我摔了一身泥。我有一只小毛驴我从来也不骑。有一天我心血来潮骑着去赶集。我手里拿着小皮鞭我心里正得意。不知怎么哗拉拉拉拉我摔了一身泥。 《数鸭子》 门前大桥下游过一群鸭。快来快来数一数。二四六七八。嘎嘎嘎嘎。真呀真多呀。数不清到底多少鸭。数不清到底多少鸭。赶鸭老爷爷胡子白花花。唱呀唱着家乡戏。还会说笑话。小孩小孩。快快上学校。别考个鸭蛋抱回家。别考个鸭蛋抱回家。 《一只哈巴狗》 一只哈巴狗。站在大门口。眼睛黑油油。想吃肉骨头。一只哈巴狗。吃完肉骨头。尾巴摇一摇。向我点点头。
《舌尖上的中国》解说词1-7集 第一季:1.自然的馈赠 作为一个美食家,食物的美妙味感固然值得玩味,但是食物是从哪里来的?毫无疑问,我们从大自然中获得所有的食物,在我们走进厨房,走向餐桌之前,先让我们回归自然,看看她给我们的最初的馈赠。 本集将选取生活在中国境内截然不同的地理环境(如海洋,草原,山林,盆地,湖泊)中的具有代表性的个人、家庭和群落为故事主角,以及由于自然环境的巨大差异(如干旱,潮湿,酷热,严寒)所带来的截然不同的饮食习惯和生活方式为故事背景,展现大自然是以怎样不同的方式赋予中国人食物,我们又是如何与自然和谐相处,从而了解在世代相传的传统生活方式中,通过各种不同的途径获取食物的故事。 第一季:2.主食的故事 主食是餐桌上的主要食物,是人们所需能量的主要来源。从远古时代赖以充饥的自然谷物到如今人们餐桌上丰盛的、让人垂涎欲滴的美食,一个异彩纷呈、变化多端的主食世界呈现在你面前。本集着重描绘不同地域、不同民族、不同风貌的有关主食的故事,展现人们对主食的样貌、口感的追求,处理和加工主食的智慧,以及中国人对主食的深厚情感。 第一季:3.转化的灵感 腐乳、豆豉、黄酒、泡菜,都有一个共同点,它们都具有一种芳香浓郁的特殊风味。这种味道是人与微生物携手贡献的成果。而这种手法被称作“发酵”。中国人的老祖宗,用一些坛坛罐罐,加上敏锐的直觉,打造了一个食物的新境界。要达到让食物转化成美食的境界,这其中要逾越障碍,要营造条件,要把握机缘,要经历挫败,从而由“吃”激发出最大的智慧。 第一季:4.时间的味道 腌制食品,风干晾晒的干货,以及酱泡、冷冻等是中国历史最为久远的食物保存方式。时至今日,中国人依然对此类食品喜爱有加。 本集涉及的美食主要有腊肉,火腿,烧腊,咸鱼(腌鱼),腌菜,泡菜,渍菜,以及盐渍,糖渍,油浸,晾晒,风干,冷冻等不同食物保存方法,展现以此为基础和原材料的各种中国美食。贮藏食物从早先的保存食物 方便携带发展到人们对食物滋味的不断追求,保鲜的技术中蕴涵了中国人的智慧,呈现着中国人的生活,同时“腌制发酵保鲜”也蕴含有中国人的情感与文化意象,如对故乡的思念,内心长时间蕴含的某种情感等等。第一季:5.厨房的秘密 与西方“菜生而鲜,食分而餐”的饮食传统文化相比,中国的菜肴更讲究色、香、味、形、器。而在这一系列意境的追逐中,中国的厨师个个都像魔术大师,都能把“水火交攻”的把戏玩到如火纯青的地步,这是 8000年来的修炼。我们也在这漫长的过程中经历了煮、蒸、炒三次重要 的飞跃,他们共同的本质无非是水火关系的调控,而至今世界上懂得蒸菜和炒菜的民族也仅此一家。本集将主要透过与具有精湛美食技艺的人有关的故事,一展中国人在厨房中的绝技。 第一季:6.五味的调和
幼儿园儿歌歌词 1《花仙子之歌》 lu lu lu lu lu lu lu lu lu lu lu lu lu lu lu lu lu 能给人们带来幸福的花儿啊。你在哪里悄悄地开放。我到处把你找。脚下的路伸向远方。大波斯菊是我的帽子。蒲公英在我在我枕边飘荡。穿过那阴森的针槐林。奋勇向前向前。幸福的花仙子就是我。名字叫Lulu不寻常。说不定说不定有那么一天。就来到来到你身旁。lu lu lu lu lu。lu lu lu lu lu。lu lu lu lu lu lu lu。大波斯菊是我的帽子。蒲公英在我在我枕边飘荡。穿过那阴森的针槐林。奋勇向前向前。幸福的花仙子就是我。名字叫Lulu不寻常。说不定说不定有那么一天。就来到来到你身旁。lu lu lu lu lu。lu lu lu lu lu。lu lu lu lu lu lu lu。 2《哪咤传奇》 是他。是他。就是他。我们的朋友。小哪咤。就是他。是他。就是他。少年英雄。小哪咤上天他比天要高。下海他比海更大。智斗妖魔勇降鬼怪。少年英雄就是小哪咤。有时他也聪明有时他也犯傻。他的个头和我一般高。有时他很努力有时他也贪玩。他的年纪和我一般大。上天他比天要高。下海他比海更大。智斗妖魔勇降鬼怪。少年英雄就是小哪咤。 3《两个小娃娃打电话》 两个小娃娃呀正在打电话呀。喂喂喂你在哪里呀。诶诶诶我在幼儿园。两个小娃娃呀正在打电话呀。喂喂喂你在做什么。诶诶诶我在学唱歌。两个小娃娃呀正在打电话呀。喂喂喂你在哪里呀。诶诶诶我在幼儿园。两个小娃娃呀正在打电话呀。喂喂喂你在做什么。诶诶诶我在学唱歌。两个小娃娃呀正在打电话呀。喂喂喂你在哪里呀。诶诶诶我在幼儿园。两个小娃娃呀正在打电话呀。喂喂喂你在做什么。诶诶诶我在学唱歌。 4《山猫和吉米》 蓝蓝的天空,青青的草地 快乐的山猫,快乐的吉咪 来到了大自然,呼吸新空气 快乐成长,健康成长, 这里是快乐的,快乐的天地 来吧。。来吧来吧。。。来吧。。来吧来吧。。。来吧。。来到我的身边 来吧。。来吧来吧。。。来吧。。来吧来吧。。。和我一起唱歌跳舞 蓝蓝的天空,青青的草地 帅气的山猫,漂亮的吉咪 来到了我身边,快乐无极限快乐成长,健康成长 这里是快乐的,快乐的天地 5《大头儿子小头爸爸》 大头儿子,小头爸爸.。一对好朋友,快乐父子俩.。儿子的头大手儿小,。爸爸的头小手儿大.。大手牵小手,走路不怕滑.。走着走着走走走走,转眼儿子就长大.。 啦啦啦啦啦啦拉啦,转眼儿子就长大! 6《小羊儿》 小羊咩咩叫妈妈。母羊咩咩也叫他。跟着妈妈一道去。吃饱早回家。小羊咩咩叫妈妈。 母羊咩咩也叫他。跟着妈妈一道去。吃饱早回家。小羊咩咩叫妈妈。母羊咩咩也叫他。 跟着妈妈一道去。吃饱早回家。小羊咩咩叫妈妈。母羊咩咩也叫他。跟着妈妈一道去。 吃饱早回家。跟着妈妈一道去。吃饱早回家。啦......啦......
幼儿儿歌歌词20首 1、小白兔 小白兔乖乖,把门开开,快点开开,我要进来,不开不开就不开,妈妈没回来,谁叫也不开。 小白兔乖乖,把门开开,妈妈回来,我要进来,快开快开快快开,妈妈回来了,我来把门开。 2、小花狗 小花狗,真叫脏,不洗脚丫就上床。问它为什么?它说忘,忘,忘! 3、吃饭 小宝宝,坐坐好,妈妈盛饭喂宝宝。细细嚼,慢慢咽,宝宝吃得直叫好。 4、干净 鼻涕擦干净,指甲剪干净,脸儿洗干净,妈妈和和亲一亲。 5、乒乓球 乒乓球,两人打,他给我,我给他, 谁都不愿落在自己家. 6、踢毽子
小毽子,小毽子,飞上天, 落下地,我们都来踢踢它,踢不好儿没关系. 7、走夜路 夜色黑,星星闪,小朋友,把家还, 突然窜出一只兔,吓得它,满处窜. 8、小盒子 小盒子,作用大,铅笔橡皮装的下, 还有一支小钢笔,装在里面心欢喜, 9、大马路 马路长又宽,我站在中间, 老师过来拜拜手, 让我赶快走,说是有危险. 10、木头人 三三三,我们都是木头人, 不许哭来不许笑,还有一个不许动。 11、小皮球,小小篮,落地开花二十一,二五六,二五七, 二八二九三十一;三五六,三五七,三八三九四十一……
12、小蜜蜂 小蜜蜂,嗡嗡嗡,嗡嗡嗡,大家一起勤劳动, 来匆匆,去匆匆,走得兴味浓,春暖花开不做工, 将来哪里好过冬?嗡嗡嗡,嗡嗡嗡,不学懒惰虫。 13、请你唱个歌吧 小杜鹃,小杜鹃,我们请你唱个歌,快来呀,大家来呀, 我们静听你的歌,咕咕!咕咕!歌声使我们快乐 14、谁会飞 谁会飞呀,鸟会飞,鸟儿鸟儿怎样飞?拍拍翅膀飞呀飞 谁会游呀,鱼会游,鱼儿鱼儿怎样游?摇摇尾巴点点头 谁会跑呀,马会跑,马儿马儿怎样跑?四脚离地身不摇。 15、好朋友 你帮我来梳梳头,我帮你来扣纽扣 团结友爱手拉手,我们都是好朋友 嘿嘿! 16、数鸭子 门前大桥下,游过一群鸭,
《舌尖上的中国》7集(全)解说词 《舌尖上的中国》是纪录频道推出的第一部高端美食类系列纪录片,从2011年3月开始大规模拍摄,是国内第一次使用高清设备拍摄的大型美食类纪录片。共在国内拍摄60个地点方,涵盖了包括港澳台在内的中国各个地域,它全方位展示博大精深的中华美食文化。向观众,尤其是海外观众展示中国的日常饮食流变,千差万别的饮食习惯和独特的味觉审美,以及上升到生存智慧层面的东方生活价值观,让观众从饮食文化的侧面认识和理解传统和变化着的中国。 而台词优美而清新,听着解说看着画面,让人心醉··· 第一集《自然的馈赠》 中国拥有世界上最富戏剧性的自然景观,高原,山林,湖泊,海岸线。这种地理跨度有助于物种的形成和保存,任何一个国家都没有这样多潜在的食物原材料。为了得到这份自然的馈赠,人们采集,捡拾,挖掘,捕捞。穿越四季,本集将展现美味背后人和自然的故事。 香格里拉,松树和栎树自然杂交林中,卓玛寻找着一种精灵般的食物——松茸。松茸保鲜期只有短短的两天,商人们以最快的速度对松茸的进行精致的加工,这样一只松茸24小时之后就会出现在东京的市场中。 松茸产地的凌晨3点,单珍卓玛和妈妈坐着爸爸开的摩托车出发。穿过村庄,母女俩要步行走进30公里之外的原始森林。雨让各种野生菌疯长,但每一个藏民都有识别松茸的慧眼。松茸出土后,卓玛立刻用地上的松针把菌坑掩盖好,只有这样,菌丝才可以不被破坏,为了延续自然的馈赠,藏民们小心翼翼地遵守着山林的规矩。 为期两个月的松茸季节,卓玛和妈妈挣到了5000元,这个收入是对她们辛苦付出的回报。老包是浙江人,他的毛竹林里,长出过遂昌最大的一个冬笋。冬笋藏在土层的下面,从竹林的表面上看,什么也没有,老包只需要看一下竹梢的叶子颜色,就能知道笋的准确位置,这完全有赖于他丰富的经验。 笋的保鲜从来都是个很大的麻烦,笋只是一个芽,是整个植物机体活动最旺盛的部分。聪明的老包保护冬笋的方法很简单,扒开松松的泥土,把笋重新埋起来,保湿,这样的埋藏方式就地利用自然,可以保鲜两周以上。 在中国的四大菜系里,都能见到冬笋。厨师偏爱它,也是因为笋的材质单纯,极易吸收配搭食物的滋味。老包正用冬笋制作一道家常笋汤,腌笃鲜主角本来应该是春笋,但是老包却使用价格高出20倍的遂昌冬笋。因为在老包眼里,这些不过是自家毛竹林里的一个小菜而已。在云南大理北部山区,醒目的红色砂岩中间,散布着不少天然的盐井,这些盐成就了云南山里人特殊的美味。老黄和他的儿子树江小溪边搭建一个炉灶,土灶每年冬天的工作就是熬盐。云龙县的冬季市场,老黄和儿子赶到集市上挑选制作火腿的猪肉,火腿的腌制在老屋的院子里开始。诺邓火腿的腌制过程很简单,老黄把多余的皮肉去除,加工成一个圆润的火腿,洒上白酒除菌,再把自制的诺盐均匀的抹上,不施锥针,只用揉、压,以免破坏纤维。 即使用现代的标准来判断,诺邓井盐仍然是食盐中的极品,虽然在这个古老的产盐地,盐业生产已经停止,但我们仍然相信诺邓盐是自然赐给山里人的一个珍贵礼物。 圣武和茂荣是兄弟俩,每年9月,他们都会来到湖北的嘉鱼县,来采挖一种自然的美味。这
百首儿歌童谣歌词大全 1、做早操 ?早上空气真叫好,我们都来做早操。 伸伸臂,弯弯腰,踢踢腿,蹦蹦跳,天天锻炼身体好。 2、饭前要洗手 小脸盆,水清请,小朋友们笑盈盈,小手儿,伸出来,洗一洗,白又净,吃饭前,先洗手,讲卫生,不得病。 3、小手绢 小手绢,四方方,天天带在我身上。 又擦鼻涕又擦汗,干干净净真好看。 4、搬鸡蛋 小老鼠,搬鸡蛋,鸡蛋太大怎么办?一只老鼠地上躺,紧紧抱住大鸡蛋。一只老鼠拉尾巴,拉呀拉呀拉回家。 5、大骆驼 骆驼骆驼志气大,风吹日晒都不怕。 走沙漠,运盐巴,再苦再累不讲话。 6、螳螂 螳螂哥,螳螂哥,肚儿大,吃得多。飞飞能把粉蝶捕,跳跳能把蝗虫捉。两把大刀舞起来,一只害虫不放过7、大蜻蜓 大蜻蜓,绿眼睛,一对眼睛亮晶晶, 飞一飞,停一停,飞来飞去捉蚊蝇。 8、小鸭子 小鸭子,一身黄,扁扁嘴巴红脚掌。 嘎嘎嘎嘎高声唱,一摇一摆下池塘。 9、拍手歌 你拍一,我拍一,天天早起练身体。 你拍二,我拍二,天天都要带手绢。 你拍三,我拍三,洗澡以后换衬衫。 你拍四,我拍四,消灭苍蝇和蚊子。 你拍五,我拍五,有痰不要随地吐。 你拍六,我拍六,瓜皮果核不乱丢。 你拍七,我拍七,吃饭细嚼别着急。 你拍八,我拍八,勤剪指甲常刷牙。 你拍九,我拍九,吃饭以前要洗手。 你拍十,我拍十,脏的东西不要吃。 10 、小螃蟹 小螃蟹,真骄傲,横着身子到处跑, 吓跑鱼,撞倒虾,一点也不懂礼貌
11 、庆六一 儿童节,是六一,小朋友们真欢喜。 又唱歌来又跳舞,高高兴兴庆六一。 12、花猫照镜子 小花猫,喵喵叫,不洗脸,把镜照, 左边照,右边照,埋怨镜子脏,气得胡子翘。 13、蚂蚁搬虫虫 小蚂蚁,搬虫虫,一个搬,搬不动,两个搬,掀条缝,三个搬,动一动,四个五个六七个,大家一起搬进洞。 14、小青蛙 小青蛙,呱呱呱,水里游,岸上爬, 吃害虫,保庄稼,人人都要保护它。 15、花儿好看我不摘 公园里,花儿开,红的红,白的白, 花儿好看我不摘,人人都说我真乖。 16 、红绿灯 大马路,宽又宽,警察叔叔站中间, 红灯亮,停一停,绿灯亮,往前行。 17 、七个果果 一二三四五六七,七六五四三二一。 七个阿姨来摘果,七个篮子手中提。七个果子摆七样。苹果、桃儿、石榴、柿子、李子、栗子、梨。 18、睡午觉 枕头放放平,花被盖盖好。 小枕头,小花被,跟我一起睡午觉,看谁先睡着。 19 、吃荸荠 荸荠有皮,皮上有泥。 洗掉荸荠皮上的泥,削去荸荠外面的皮, 荸荠没了皮和泥,干干净净吃荸荠。 20 、小云骑牛去打油 小云骑牛去打油,遇着小友踢皮球, 皮球飞来吓了牛,摔下小云撒了油。 21 、盆和瓶 车上有个盆,盆里有个瓶,乒乒乒,乓乓乓, 不知是瓶碰盆,还是盆碰瓶。 22、小脏手,长指甲
研发工具Scifinder 《使用说明书》 第一章 Scifinder数据库介绍 1.1 Scifinder数据库 1.1.1 检索系统 支持的检索方式:主题检索、物质名称检索、分子式检索、结构式检索、亚结构式检索、相似结构式检索、反应式检索、类反应式检索、分析与二次检索。作者、机构名称、杂志名称、专利号、CA号 检索结果后处理系统:Scifinder不仅仅包含有分子式、反应式和结构式(包括亚结构检索)等多种检索功能,而且在得到初步检索结果的基础上还可以进一步利用超过20个选项的后处理功能以最快的速度找到最精确的答案。它已经超越了检索工具的范畴,而成为研发人员不可或缺的研发工具。 包含的信息量:大于2600万条文章记录;3000多万个有机无机物质,5800多万生物序列,1100多万条单步多步反应。 信息时效:1907年-至今 1.1.2 原文下载系统 Scifinder具有强大的期刊和专利链接,收录了全世界9500多种主要期刊和50多家合法专利发行机构的专利文献中公布的研究成果,占全球化工信息的98%。其中能直接链接原文的化工类核心期刊1365种,约占全球英文版电子化工类期刊总数的90%,几乎包含了所有高影响因子期刊。 1.2 Scifinder的化学学科覆盖 事实上,Scifinder数据库囊括了自20世纪以来所有与化学相关的资料,以及大量生命科学及及其它科学学科方面的信息。
1.2.1 生命科学领域 遗传学、基因组学、酶学、蛋白质组学、实验内科学、生物化学、生物技术学、分子生物学、微生物学、细胞生物学、药理学等 能够保证将9大主要专利组织2日内发布的与生物加工方法、蛋白质组技术、新遗传学工艺,及其它对现代药品开发至关重要的课题等相关的专利收录进来; 通过Scifinder访问遗传学、酶学、生物化学、生物技术学及更多科学信息。 用户可查找:摘自细胞、科学、核酸研究、现代药品开发资料及其它知名期刊的科学信息。 1.2.2 传统化学领域 有机化学 高分子——聚合物、塑料、纺织、橡胶粘合剂等 应用化学和化学工程——加工、工业化学、金属/合金、陶瓷、环境等 物理化学、无机化学和分析化学