Linux设备驱动编程之内存与I/O操作
2006-10-27 13:35作者:宋宝华出处:天极开发责任编辑:方舟
相关专题:Linux设备驱动程序开发入门
对于提供了MMU(存储管理器,辅助操作系统进行内存管理,提供虚实地址转换等硬件支持)的处理器而言,Linux提供了复杂的存储管理系统,使得进程所能访问的内存达到4GB。
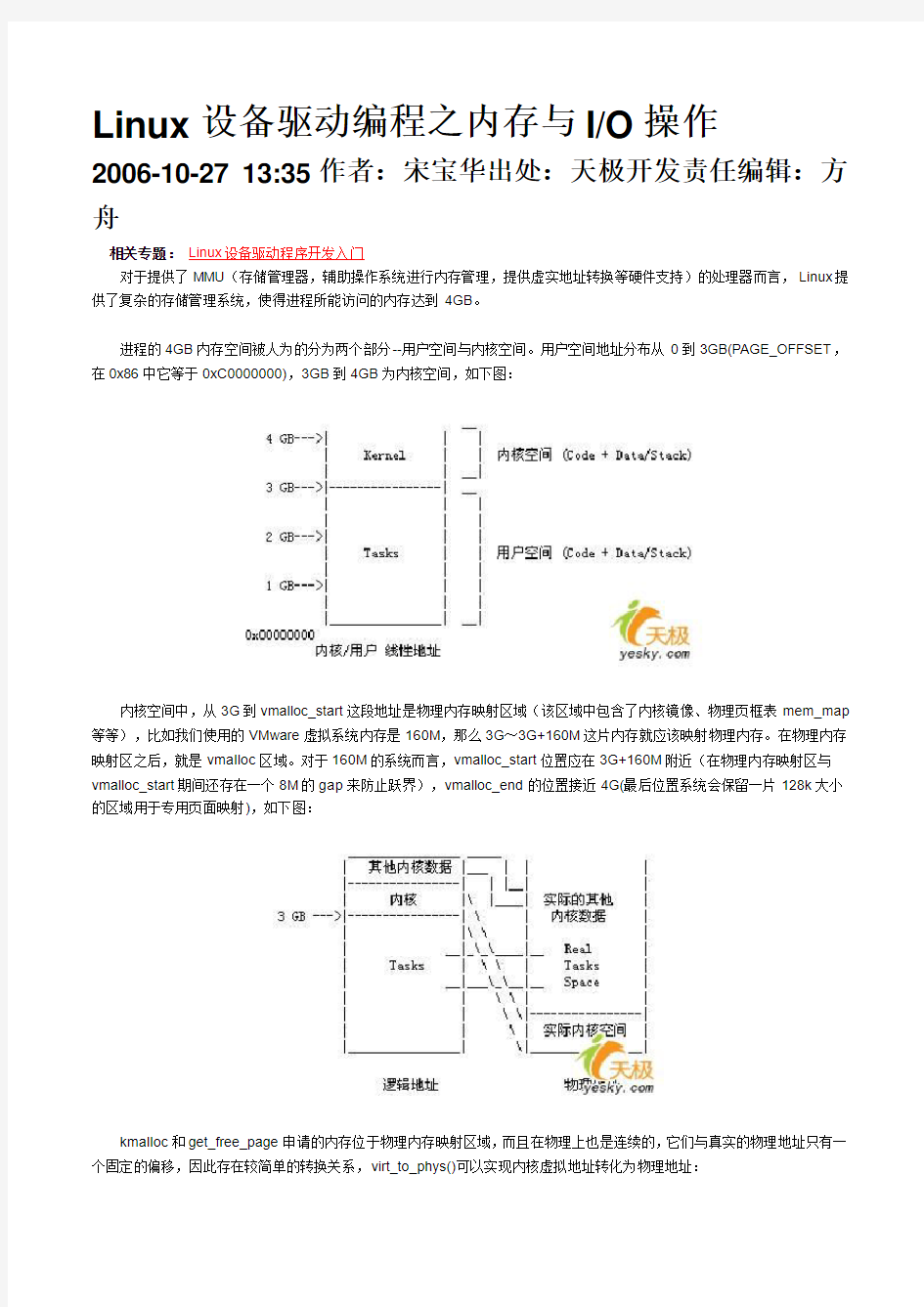
进程的4GB内存空间被人为的分为两个部分--用户空间与内核空间。用户空间地址分布从0到3GB(PAGE_OFFSET,在0x86中它等于0xC0000000),3GB到4GB为内核空间,如下图:
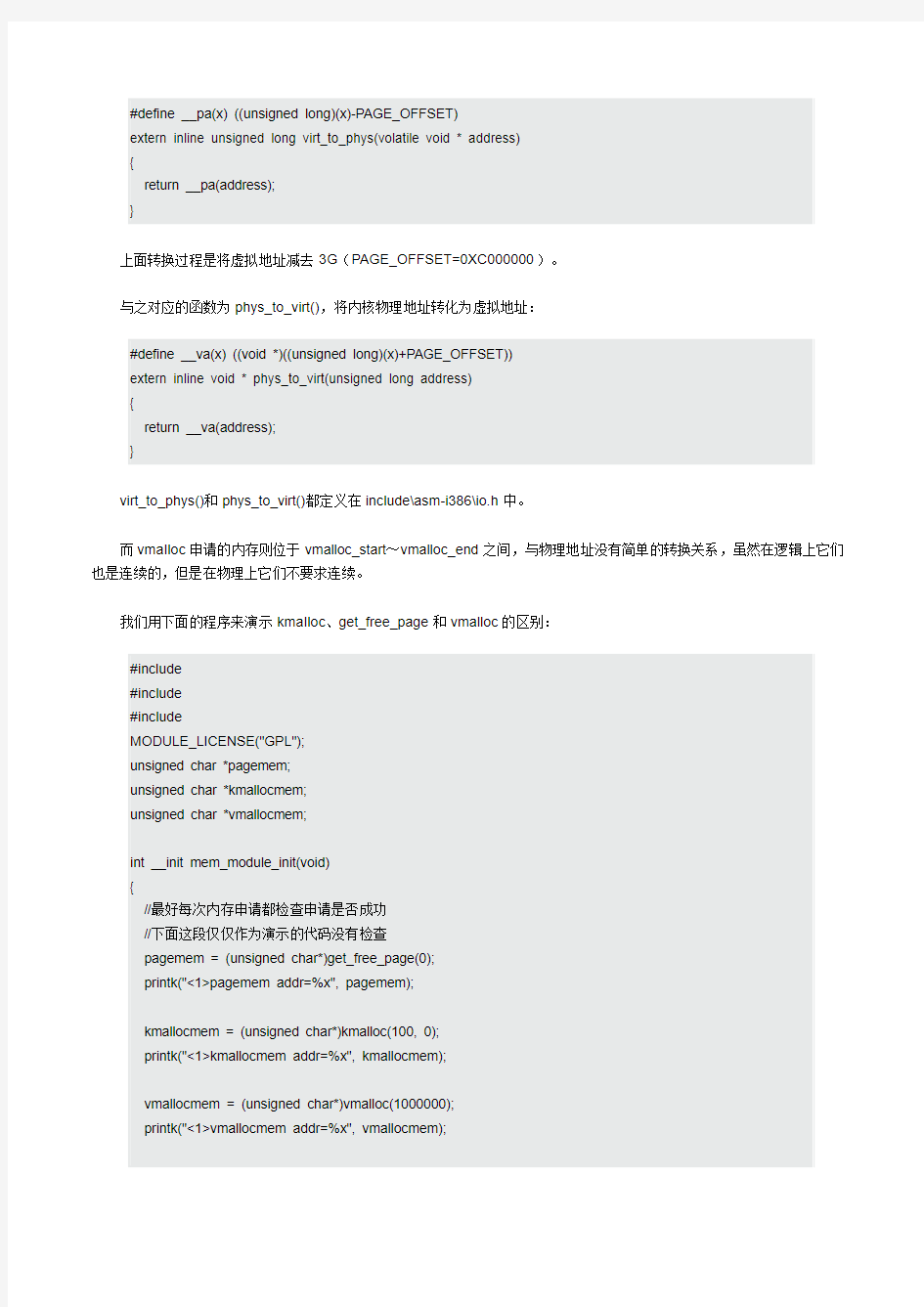
内核空间中,从3G到vmalloc_start这段地址是物理内存映射区域(该区域中包含了内核镜像、物理页框表mem_map 等等),比如我们使用的VMware虚拟系统内存是160M,那么3G~3G+160M这片内存就应该映射物理内存。在物理内存映射区之后,就是vmalloc区域。对于160M的系统而言,vmalloc_start位置应在3G+160M附近(在物理内存映射区与vmalloc_start期间还存在一个8M的gap来防止跃界),vmalloc_end的位置接近4G(最后位置系统会保留一片128k大小的区域用于专用页面映射),如下图:
kmalloc和get_free_page申请的内存位于物理内存映射区域,而且在物理上也是连续的,它们与真实的物理地址只有一个固定的偏移,因此存在较简单的转换关系,virt_to_phys()可以实现内核虚拟地址转化为物理地址:
上面转换过程是将虚拟地址减去3G(PAGE_OFFSET=0XC000000)。
与之对应的函数为phys_to_virt(),将内核物理地址转化为虚拟地址:
virt_to_phys()和phys_to_virt()都定义在include\asm-i386\io.h中。
而vmalloc申请的内存则位于vmalloc_start~vmalloc_end之间,与物理地址没有简单的转换关系,虽然在逻辑上它们也是连续的,但是在物理上它们不要求连续。
我们用下面的程序来演示kmalloc、get_free_page和vmalloc的区别:
#include
#include
#include
MODULE_LICENSE("GPL");
unsigned char *pagemem;
unsigned char *kmallocmem;
unsigned char *vmallocmem;
int __init mem_module_init(void)
{
//最好每次内存申请都检查申请是否成功
//下面这段仅仅作为演示的代码没有检查
pagemem = (unsigned char*)get_free_page(0);
printk("<1>pagemem addr=%x", pagemem);
kmallocmem = (unsigned char*)kmalloc(100, 0);
printk("<1>kmallocmem addr=%x", kmallocmem);
vmallocmem = (unsigned char*)vmalloc(1000000);
printk("<1>vmallocmem addr=%x", vmallocmem);
return 0;
}
void __exit mem_module_exit(void)
{
free_page(pagemem);
kfree(kmallocmem);
vfree(vmallocmem);
}
module_init(mem_module_init);
module_exit(mem_module_exit);
我们的系统上有160MB的内存空间,运行一次上述程序,发现pagemem的地址在0xc7997000(约3G+121M)、kmallocmem地址在0xc9bc1380(约3G+155M)、vmallocmem的地址在0xcabeb000(约3G+171M)处,符合前文所述的内存布局。
接下来,我们讨论Linux设备驱动究竟怎样访问外设的I/O端口(寄存器)。
几乎每一种外设都是通过读写设备上的寄存器来进行的,通常包括控制寄存器、状态寄存器和数据寄存器三大类,外设的寄存器通常被连续地编址。根据CPU体系结构的不同,CPU对IO端口的编址方式有两种:
(1)I/O映射方式(I/O-mapped)
典型地,如X86处理器为外设专门实现了一个单独的地址空间,称为"I/O地址空间"或者"I/O端口空间",CPU通过专门的I/O指令(如X86的IN和OUT指令)来访问这一空间中的地址单元。
(2)内存映射方式(Memory-mapped)
RISC指令系统的CPU(如ARM、PowerPC等)通常只实现一个物理地址空间,外设I/O端口成为内存的一部分。此时,CPU可以象访问一个内存单元那样访问外设I/O端口,而不需要设立专门的外设I/O指令。
但是,这两者在硬件实现上的差异对于软件来说是完全透明的,驱动程序开发人员可以将内存映射方式的I/O端口和外设内存统一看作是"I/O内存"资源。
一般来说,在系统运行时,外设的I/O内存资源的物理地址是已知的,由硬件的设计决定。但是CPU通常并没有为这些已知的外设I/O内存资源的物理地址预定义虚拟地址范围,驱动程序并不能直接通过物理地址访问I/O内存资源,而必须将它们映射到核心虚地址空间内(通过页表),然后才能根据映射所得到的核心虚地址范围,通过访内指令访问这些I/O内存资源。Linux在io.h头文件中声明了函数ioremap(),用来将I/O内存资源的物理地址映射到核心虚地址空间(3GB-4GB)中,原型如下:
iounmap函数用于取消ioremap()所做的映射,原型如下:
这两个函数都是实现在mm/ioremap.c文件中。
在将I/O内存资源的物理地址映射成核心虚地址后,理论上讲我们就可以象读写RAM那样直接读写I/O内存资源了。为了保证驱动程序的跨平台的可移植性,我们应该使用Linux中特定的函数来访问I/O内存资源,而不应该通过指向核心虚地址的指针来访问。如在x86平台上,读写I/O的函数如下所示:
#define readb(addr) (*(volatile unsigned char *) __io_virt(addr))
#define readw(addr) (*(volatile unsigned short *) __io_virt(addr))
#define readl(addr) (*(volatile unsigned int *) __io_virt(addr))
#define writeb(b,addr) (*(volatile unsigned char *) __io_virt(addr) = (b))
#define writew(b,addr) (*(volatile unsigned short *) __io_virt(addr) = (b))
#define writel(b,addr) (*(volatile unsigned int *) __io_virt(addr) = (b))
#define memset_io(a,b,c) memset(__io_virt(a),(b),(c))
#define memcpy_fromio(a,b,c) memcpy((a),__io_virt(b),(c))
#define memcpy_toio(a,b,c) memcpy(__io_virt(a),(b),(c))
最后,我们要特别强调驱动程序中mmap函数的实现方法。用mmap映射一个设备,意味着使用户空间的一段地址关联到设备内存上,这使得只要程序在分配的地址范围内进行读取或者写入,实际上就是对设备的访问。
笔者在Linux源代码中进行包含"ioremap"文本的搜索,发现真正出现的ioremap的地方相当少。所以笔者追根索源地寻找I/O操作的物理地址转换到虚拟地址的真实所在,发现Linux有替代ioremap的语句,但是这个转换过程却是不可或缺的。
譬如我们再次摘取S3C2410这个ARM芯片RTC(实时钟)驱动中的一小段:
static void get_rtc_time(int alm, struct rtc_time *rtc_tm)
{
spin_lock_irq(&rtc_lock);
if (alm == 1) {
rtc_tm->tm_year = (unsigned char)ALMYEAR & Msk_RTCYEAR;
rtc_tm->tm_mon = (unsigned char)ALMMON & Msk_RTCMON;
rtc_tm->tm_mday = (unsigned char)ALMDAY & Msk_RTCDAY;
rtc_tm->tm_hour = (unsigned char)ALMHOUR & Msk_RTCHOUR;
rtc_tm->tm_min = (unsigned char)ALMMIN & Msk_RTCMIN;
rtc_tm->tm_sec = (unsigned char)ALMSEC & Msk_RTCSEC;
}
else {
read_rtc_bcd_time:
rtc_tm->tm_year = (unsigned char)BCDYEAR & Msk_RTCYEAR;
rtc_tm->tm_mon = (unsigned char)BCDMON & Msk_RTCMON;
rtc_tm->tm_mday = (unsigned char)BCDDAY & Msk_RTCDAY;
rtc_tm->tm_hour = (unsigned char)BCDHOUR & Msk_RTCHOUR;
rtc_tm->tm_min = (unsigned char)BCDMIN & Msk_RTCMIN;
rtc_tm->tm_sec = (unsigned char)BCDSEC & Msk_RTCSEC;
if (rtc_tm->tm_sec == 0) {
/* Re-read all BCD registers in case of BCDSEC is 0.
See RTC section at the manual for more info. */
goto read_rtc_bcd_time;
}
}
spin_unlock_irq(&rtc_lock);
BCD_TO_BIN(rtc_tm->tm_year);
BCD_TO_BIN(rtc_tm->tm_mon);
BCD_TO_BIN(rtc_tm->tm_mday);
BCD_TO_BIN(rtc_tm->tm_hour);
BCD_TO_BIN(rtc_tm->tm_min);
BCD_TO_BIN(rtc_tm->tm_sec);
/* The epoch of tm_year is 1900 */
rtc_tm->tm_year += RTC_LEAP_YEAR - 1900;
/* tm_mon starts at 0, but rtc month starts at 1 */
rtc_tm->tm_mon--;
}
I/O操作似乎就是对ALMYEAR、ALMMON、ALMDAY定义的寄存器进行操作,那这些宏究竟定义为什么呢?
其中借助了宏bRTC,这个宏定义为:
其中又借助了宏__REG,而__REG又定义为:
最后的io_p2v才是真正"玩"虚拟地址和物理地址转换的地方:
与__REG对应的有个__PREG:
与io_p2v对应的有个io_v2p:
可见有没有出现ioremap是次要的,关键问题是有无虚拟地址和物理地址的转换!
下面的程序在启动的时候保留一段内存,然后使用ioremap将它映射到内核虚拟空间,同时又用remap_page_range映射到用户虚拟空间,这样一来,内核和用户都能访问。如果在内核虚拟地址将这段内存初始化串"abcd",那么在用户虚拟地址能够读出来:
/************mmap_ioremap.c**************/
#include
#include
#include
#include
#include
#include
#include
MODULE_PARM(mem_start, "i");
MODULE_PARM(mem_size, "i");
static int mem_start = 101, mem_size = 10;
static char *reserve_virt_addr;
static int major;
int mmapdrv_open(struct inode *inode, struct file *file);
int mmapdrv_release(struct inode *inode, struct file *file);
int mmapdrv_mmap(struct file *file, struct vm_area_struct *vma);
static struct file_operations mmapdrv_fops =
{
owner: THIS_MODULE, mmap: mmapdrv_mmap, open: mmapdrv_open, release:
mmapdrv_release,
};
int init_module(void)
{
if ((major = register_chrdev(0, "mmapdrv", &mmapdrv_fops)) < 0)
printk("mmapdrv: unable to register character device\n");
return ( - EIO);
}
printk("mmap device major = %d\n", major);
printk("high memory physical address 0x%ldM\n", virt_to_phys(high_memory) / 1024 / 1024);
reserve_virt_addr = ioremap(mem_start *1024 * 1024, mem_size *1024 * 1024); printk("reserve_virt_addr = 0x%lx\n", (unsigned long)reserve_virt_addr);
if (reserve_virt_addr)
{
int i;
for (i = 0; i < mem_size *1024 * 1024; i += 4)
{
reserve_virt_addr[i] = 'a';
reserve_virt_addr[i + 1] = 'b';
reserve_virt_addr[i + 2] = 'c';
reserve_virt_addr[i + 3] = 'd';
}
}
else
{
unregister_chrdev(major, "mmapdrv");
return - ENODEV;
}
return 0;
}
/* remove the module */
void cleanup_module(void)
{
if (reserve_virt_addr)
iounmap(reserve_virt_addr);
unregister_chrdev(major, "mmapdrv");
return ;
}
int mmapdrv_open(struct inode *inode, struct file *file)
{
MOD_INC_USE_COUNT;
return (0);
int mmapdrv_release(struct inode *inode, struct file *file)
{
MOD_DEC_USE_COUNT;
return (0);
}
int mmapdrv_mmap(struct file *file, struct vm_area_struct *vma)
{
unsigned long offset = vma->vm_pgoff << PAGE_SHIFT;
unsigned long size = vma->vm_end - vma->vm_start;
if (size > mem_size *1024 * 1024)
{
printk("size too big\n");
return ( - ENXIO);
}
offset = offset + mem_start * 1024 * 1024;
/* we do not want to have this area swapped out, lock it */
vma->vm_flags |= VM_LOCKED;
if (remap_page_range(vma, vma->vm_start, offset, size, PAGE_SHARED))
{
printk("remap page range failed\n");
return - ENXIO;
}
return (0);
}
remap_page_range函数的功能是构造用于映射一段物理地址的新页表,实现了内核空间与用户空间的映射,其原型如下:
使用mmap最典型的例子是显示卡的驱动,将显存空间直接从内核映射到用户空间将可提供显存的读写效率。
Linux设备驱动程序设计实例2007-03-03 23:09 Linux系统中,设备驱动程序是操作系统内核的重要组成部分,在与硬件设备之间 建立了标准的抽象接口。通过这个接口,用户可以像处理普通文件一样,对硬件设 备进行打开(open)、关闭(close)、读写(read/write)等操作。通过分析和设计设 备驱动程序,可以深入理解Linux系统和进行系统开发。本文通过一个简单的例子 来说明设备驱动程序的设计。 1、程序清单 //MyDev.c 2000年2月7日编写 #ifndef __KERNEL__ #define __KERNEL__//按内核模块编译 #endif #ifndef MODULE #define MODULE//设备驱动程序模块编译 #endif #define DEVICE_NAME "MyDev" #define OPENSPK 1 #define CLOSESPK 2 //必要的头文件 #include
嵌入式系统的以太网接口设计及linux驱动 1 以太网概述 以太网(Ethernet)是当今局域网采用的最通用的通信协议标准。在以太网中,所有计算机被连接在一条电缆上,采用带冲突检测的载波侦听多路访问(CSMA/CD)方法,采用竞争机制和总线拓扑结构。基本上,以太网由共享传输媒体,如双绞线电缆或同轴电缆、多端口集线器、网桥或交换机构成。 按照OSI(Open System Interconnection Reference Model,开放式系统互联参考模型)7层参考模型,以太网定义的是物理层(PHY)和数据链路层(对应以太网的MAC层)的标准。 2 嵌入式处理器上扩展以太网接口 以太网接口控制器主要包括MAC乘PHY两部分,如图1所示为嵌入式处理器集成MAC层控制器。 MAC层控制器和PHY的连接是通过MII、RMII等接口实现的。在IEEE802的标准系列中,数据链路层包括LLC和MAC两个子层。其中MAC负责完成数据帧的封装、解封、发送和接受功能。PHY层的结构随着传输速率的不同而有一定的差异。对于1OBaseT等网络,从以太网PHY芯片输出的就是传输所需的差分信号。但是还需要一个网络隔离变压器组成图2的结构。网络隔离变压器可起到抑制共模干扰、隔离线路以及阻抗匹配等作用。 本文介绍一种新款网络接口芯片DM9000A,它可以很方便的实现与嵌入式CPU的接口,实现扩展以太网口的功能。DM9000A是中国台湾DAVICOM公司推出的一款高速以太网接口芯片,其基本特征是:集成10/100M物理层接口;内部带有16K字节SRAM用作接收发送的FIFO缓存;支持8/16bit两种主机工作模式:
linux驱动开发的经典书籍 结构、操作系统、体系结构、编译原理、计算机网络你全修过 我想大概可以分为4个阶段,水平从低到高 从安装使用=>linux常用命令=>linux系统编程=>内核开发阅读内核源码 其中学习linux常用命令时就要学会自己编译内核,优化系统,调整参数 安装和常用命令书太多了,找本稍微详细点的就ok,其间需要学会正则表达式 系统编程推荐《高级unix环境编程》,黑话叫APUE 还有《unix网络编程》 这时候大概还需要看资料理解elf文件格式,连接器和加载器,cmu的一本教材中文名为《深入理解计算机系统》比较好 内核开发阅读内核源码阶段,从写驱动入手逐渐深入linux内核开发 参考书如下《linux device drivers》,黑话叫ldd 《linux kernel development》,黑话叫lkd 《understading the linux kernel》,黑话叫utlk 《linux源码情景分析》 这四本书为搞内核的必读书籍 最后,第三阶段和第四阶段最重动手,空言无益,光看书也不罩,不动手那些东西理解不了 学习linux/unix编程方法的建议 建议学习路径: 首先先学学编辑器,vim, emacs什么的都行。 然后学make file文件,只要知道一点就行,这样就可以准备编程序了。 然后看看《C程序设计语言》K&R,这样呢,基本上就可以进行一般的编程了,顺便找本数据结构的书来看。 如果想学习UNIX/LINUX的编程,《APUE》绝对经典的教材,加深一下功底,学习《UNP》的第二卷。这样基本上系统方面的就可以掌握了。 然后再看Douglus E. Comer的《用TCP/IP进行网际互连》第一卷,学习一下网络的知识,再看《UNP》的第一卷,不仅学习网络编程,而且对系统编程的一些常用的技巧就很熟悉了,如果继续网络编程,建议看《TCP/IP进行网际互连》的第三卷,里面有很多关于应用
实验三:Linux网络设备驱动开发实验 一、实验目的 读懂linux网络设备驱动程序例子,并且实际加载驱动程序,加载进操作系统以后,会随着上层应用程序的触发而执行相应动作,具体执行的动作可以通过代码进行改变。 ●读懂源码及makefile ●编译驱动程序 ●加载 ●多种形式触发动作 二、预备知识 熟悉linux驱动基本原理,能读懂简单的makefile。 三、实验预计时间 80-120分钟左右 四、驱动程序部分具体步骤 要求读懂一个最简单的驱动程序,在驱动程序的诸如“xxx_open”、“xxx_read”等标准接口里面加入打印语句。可参考多模式教学网上的驱动样例。 五、用于触发驱动动作的应用程序及命令 驱动程序就是以静态的标准接口库函数形式存在,网络设备驱动会受到两大类情况的触发,一种是linux里面的控制台里面的命令,另一种是套接口应用程序,首先要搞清都有哪些具体的命令和应用程序流程,应用程序参考多模式教学网的例子。 六、运行测试 提示:需要将驱动程序以dll加载进系统中,并且触发应用程序调用各种文件操作的接口函数,使得驱动有所动作,打印出相关信息。 1.编译驱动: cd /某某目录/vnetdev/ make clean make 2.加载驱动与打开网卡: insmod netdrv.ko
ifconfig vnet0 up 3.运行应用程序 ../raw 4.通过命令“修改网卡MTU”触发驱动执行动作: ifconfig vnet0 mtu 1222 5.显示内核打印: cat /var/log/messages 6.卸载: ifconfig vnet0 down rmmod netdrv.ko 7.修改代码中的某些函数中的打印信息,重新试验上述流程。 至此大家都应该真正理解和掌握了驱动程序-操作系统-应用程序的三者联动机制。 七、实验结果 由图可知能正常加载网卡驱动,并且能够打印调试信息。
Linux2.6设备驱动常用的接口函数(一) ----字符设备 刚开始,学习linux驱动,觉得linux驱动很难,有字符设备,块设备,网络设备,针对每一种设备其接口函数,驱动的架构都不一样。这么多函数,要每一个的熟悉,那可多难啦!可后来发现linux驱动有很多规律可循,驱动的基本框架都差不多,再就是一些通用的模块。 基本的架构里包括:加载,卸载,常用的读写,打开,关闭,这是那种那基本的咯。利用这些基本的功能,当然无法实现一个系统。比方说:当多个执行单元对资源进行访问时,会引发竞态;当执行单元获取不到资源时,它是阻塞还是非阻塞?当突然间来了中断,该怎么办?还有内存管理,异步通知。而linux 针对这些问题提供了一系列的接口函数和模板框架。这样,在实际驱动设计中,根据具体的要求,选择不同的模块来实现其功能需求。 觉得能熟练理解,运用这些函数,是写号linux设备驱动的第一步。因为是设备驱动,是与最底层的设备打交道,就必须要熟悉底层设备的一些特性,例如字符设备,块设备等。系统提供的接口函数,功能模块就像是工具,能够根据不同的底层设备的的一些特性,选择不同的工具,方能在linux驱动中游刃有余。 最后就是调试,这可是最头疼的事。在调试过程中,总会遇到这样,那样的问题。怎样能更快,更好的发现并解决这些问题,就是一个人的道行咯!我个人觉得: 发现问题比解决问题更难! 时好时坏的东西,最纠结! 看得见的错误比看不见的错误好解决! 一:Fops结构体中函数: ①ssize_t (*read) (struct file *, char __user *, size_t, loff_t *); 用来从设备中获取数据. 在这个位置的一个空指针导致 read 系统调用以-EINVAL("Invalid argument") 失败. 一个非负返回值代表了成功读取的字节数( 返回值是一个 "signed size" 类型, 常常是目标平台本地的整数类型). ②ssize_t (*write) (struct file *, const char __user *, size_t, loff_t *); 发送数据给设备. 如果 NULL, -EINVAL 返回给调用 write 系统调用的程序. 如果非负, 返回值代表成功写的字节数 ③loff_t (*llseek) (struct file *, loff_t, int); llseek 方法用作改变文件中的当前读/写位置, 并且新位置作为(正的)返回值. loff_t 参数是一个"long offset", 并且就算在 32位平台上也至少 64 位宽. 错误由一个负返回值指示. 如果这个函数指针是 NULL, seek 调用会以潜在地无法预知的方式修改 file 结构中的位置计数器( 在"file 结构" 一节中描述). ④int (*open) (struct inode *, struct file *);
linux驱动程序的编写 一、实验目的 1.掌握linux驱动程序的编写方法 2.掌握驱动程序动态模块的调试方法 3.掌握驱动程序填加到内核的方法 二、实验内容 1. 学习linux驱动程序的编写流程 2. 学习驱动程序动态模块的调试方法 3. 学习驱动程序填加到内核的流程 三、实验设备 PentiumII以上的PC机,LINUX操作系统,EL-ARM860实验箱 四、linux的驱动程序的编写 嵌入式应用对成本和实时性比较敏感,而对linux的应用主要体现在对硬件的驱动程序的编写和上层应用程序的开发上。 嵌入式linux驱动程序的基本结构和标准Linux的结构基本一致,也支持模块化模式,所以,大部分驱动程序编成模块化形式,而且,要求可以在不同的体系结构上安装。linux是可以支持模块化模式的,但由于嵌入式应用是针对具体的应用,所以,一般不采用该模式,而是把驱动程序直接编译进内核之中。但是这种模式是调试驱动模块的极佳方法。 系统调用是操作系统内核和应用程序之间的接口,设备驱动程序是操作系统内核和机器硬件之间的接口。设备驱动程序为应用程序屏蔽了硬件的细节,这样在应用程序看来,硬件设备只是一个设备文件,应用程序可以像操作普通文件一样对硬件设备进行操作。同时,设备驱动程序是内核的一部分,它完成以下的功能:对设备初始化和释放;把数据从内核传送到硬件和从硬件读取数据;读取应用程序传送给设备文件的数据和回送应用程序请求的数据;检测和处理设备出现的错误。在linux操作系统下有字符设备和块设备,网络设备三类主要的设备文件类型。 字符设备和块设备的主要区别是:在对字符设备发出读写请求时,实际的硬件I/O一般就紧接着发生了;块设备利用一块系统内存作为缓冲区,当用户进程对设备请求满足用户要求时,就返回请求的数据。块设备是主要针对磁盘等慢速设备设计的,以免耗费过多的CPU时间来等待。 1 字符设备驱动结构 Linux字符设备驱动的关键数据结构是cdev和file_operations结构体。
实现如下的功能: --字符设备驱动程序的结构及驱动程序需要实现的系统调用 --可以使用cat命令或者自编的readtest命令读出"设备"里的内容 --以8139网卡为例,演示了I/O端口和I/O内存的使用 本文中的大部分内容在Linux Device Driver这本书中都可以找到, 这本书是Linux驱动开发者的唯一圣经。 ================================================== ===== 先来看看整个驱动程序的入口,是char8139_init(这个函数 如果不指定MODULE_LICENSE("GPL", 在模块插入内核的 时候会出错,因为将非"GPL"的模块插入内核就沾污了内核的 "GPL"属性。 module_init(char8139_init; module_exit(char8139_exit; MODULE_LICENSE("GPL"; MODULE_AUTHOR("ypixunil"; MODULE_DESCRIPTION("Wierd char device driver for Realtek 8139 NIC"; 接着往下看char8139_init( static int __init char8139_init(void {
int result; PDBG("hello. init.\n"; /* register our char device */ result=register_chrdev(char8139_major, "char8139", &char8139_fops; if(result<0 { PDBG("Cannot allocate major device number!\n"; return result; } /* register_chrdev( will assign a major device number and return if it called * with "major" parameter set to 0 */ if(char8139_major == 0 char8139_major=result; /* allocate some kernel memory we need */ buffer=(unsigned char*(kmalloc(CHAR8139_BUFFER_SIZE, GFP_KERNEL; if(!buffer { PDBG("Cannot allocate memory!\n"; result= -ENOMEM;
以下电子书来源于宋宝华《Linux设备驱动开发详解:基于最新的Linux 4.0内核》第19章《Linux电源管理系统架构和驱动》 本章导读 Linux在消费电子领域的应用已经铺天盖地,而对于消费电子产品而言,省电是一个重要的议题。 本章将介绍Linux设备树(Device Tree)的起源、结构和因为设备树而引起的驱动和BSP 变更。 19.1节阐述了Linux电源管理的总体架构。 19.2~19.8节分别论述了CPUFreq、CPUIdle、CPU热插拔以及底层的基础设施Regulator、OPP以及电源管理的调试工具PowerTop。 19.9节讲解了系统Suspend to RAM的过程以及设备驱动如何提供对Suspend to RAM的支持。 19.10节讲解了设备驱动的Runtime suspend。 本章是相对《Linux设备驱动开发详解(第2版)》全新的一章内容,也是Linux设备驱动工程师必备的知识体系。
第十九章Linux电源管理系统架构和驱动 1.Linux电源管理全局架构 Linux电源管理非常复杂,牵扯到系统级的待机、频率电压变换、系统空闲时的处理以及每个设备驱动对于系统待机的支持和每个设备的运行时电源管理,可以说和系统中的每个设备驱动都息息相关。 对于消费电子产品来说,电源管理相当重要。因此,这部分工作往往在开发周期中占据相当大的比重,图19.1呈现了Linux内核电源管理的整体架构。大体可以归纳为如下几类: 1.CPU在运行时根据系统负载进行动态电压和频率变换的CPUFreq 2.CPU在系统空闲时根据空闲的情况进行低功耗模式的CPUIdle 3.多核系统下CPU的热插拔支持 4.系统和设备对于延迟的特别需求而提出申请的PM QoS,它会作用于CPUIdle的具体 策略 5.设备驱动针对系统Suspend to RAM/Disk的一系列入口函数 6.SoC进入suspend状态、SDRAM自刷新的入口 7.设备的runtime(运行时)动态电源管理,根据使用情况动态开关设备 8.底层的时钟、稳压器、频率/电压表(OPP模块完成)支撑,各驱动子系统都可能用 到 图19.1 Linux电源管理系统架构 2.CPUFreq驱动 CPUFreq子系统位于drivers/cpufreq目录,负责进行运行过程中CPU频率和电压的动态
本人此刻还不是什么驱动工程师,连入门都谈不上,但我坚信在未来的3-5年我肯定能成为我想像中的人,因为我马上就要进入这一行工作了。写下这个日志来记录我是怎么最后成为我想像中的人才的,呵呵。 《Linux驱动工程师》这个东西是我在大二的时候看到有一篇讲如何学习嵌入式的,点击这里下载PDF,里面讲到嵌入式分为四层:硬件,驱动,系统,应用程序;还说linux驱动最难然后工资也最高就冲着他这句话我就决定我大学毕业的时候要去做这个linux驱动工程师,随后我就先后买了51单片机,ARM7,ARM9还有一大堆的视频教程准备来进行学习。我还跟我旁边那个哈工大哥们说:“我们学校像我这样的人很少,你们学校呢?”他说:“太少了,不过我们学校都是做这种板子卖的人比较多!”。行,你们牛!即使是买了这些东西,从大二到现在都快毕业了但感觉还是没有入门。回想一下我都学过什么啊:1:自己在ARM9上写bootloader(主要锻炼了三方面的知识:C语言应该写了有近万行的代码,ARM9的外设的基本操作方法如UART,LCD,TOUCH,SD,USB,ETHERNET...,makefile);2:移植和学习linux驱动。下面我说一下我学习Linux驱动的一个思路这也是我在面试的时候自我介绍中最重要的部分;1:硬件知识学习Linux驱动首先得了解这个驱动对应的硬件的一些基本原理和操作方法比如LCD你得了解它的场同步,行同步,像素时钟,一个像素的表示模式,还有就是这个LCD是怎么把图像显示在屏幕上的。如果是USB,SD卡就得了解相关协议。可以通过spec(协议)、datasheet来了解,这就是传说中的Linux驱动开发三件宝之二,还有一个就是linux相关源码。2:了解linux驱动框架linux下的每一类驱动差不多都是一个比较完善的子系统,比如FLASH的驱动它就属于MTD子系统从上到下分为四层:设备节点层,设备层,原始设备层,最下面的与具体硬件相关的硬件驱动层,通常要我们自己来实现就是最下面这个与具体硬件相关那部分代码。3:了解这个驱动的数据流。这个过程与第二个过程紧密相关,如果了解了驱动的框架差不多这个过程也算了解了。比如flash.在/dev/目录下有对应flash的字符设备文件和块设备文件,用户对这些文件进行读、写、ioctl操作,其间通过层层的函数调用最终将调用到最下面的硬件驱动层对硬件进行操作。了解这个过程我相信在调试驱动的时候是很有帮助。3:分析与硬件相关通常需要我们实现的那部分源代码。4:三板子上将驱动调试出来。每次调试都会出问题,但我买的板子提供的资料比较全调试过程中遇到的问题都比较浅显,即使是浅显的问题也要把它记录下来。(这个是我上次在华为面试的时候,那个人问我你调试驱动遇到过什么问题吗?你是如何解决的。当时我学习还没有到调试驱动这一步,所以那次面试也惨败收场)。 好像说了这么多,还没有进入正题《工作的选择》。在年前去了龙芯,实习2.8K,转正3.5k,环境还是不错,经理很好,头儿也很帅都是中科院的硕士。不过去了两周我就没去了身边的人都不太理解,我也一度有过后悔的时候,从龙芯出来应该是1月6号,也就是从那个时候开始我就没有再找工作,转而学习linux驱动。一直到上周日。上周日的晚上我就开始投简历一开始要找linux驱动,在智联里面输入linux驱动出来500来个职位,点开一看没有一个自己符合要求的,差不多都要3-5年经验本科,有时候好不容易有个实习的关键字在里面,一看要求硕士,严重打击了我的信心,哎不管了随便投,最后又投了一下嵌入式关键字的职位。最后就瞎申请,看看职位要求差不多就申请。周一来了,这周一共来了6个面试,创下了我求职以来的历史新高。周一下午面了一家感觉还不错不过到现在也没有给我一个通知,估计当时我要了4500把他给要跑了,这家是做测量的不是Linux驱动,差不多是把ARM当单片机用。周二上午一家也是要招linux驱动面了估计不到二分钟,他
参考: 韦东山视频第10课第一节内核启动流程分析之编译体验 第11课第三节构建根文件系统之busybox 第11课第四节构建根文件系统之构建根文件系统韦东山书籍《嵌入式linux应用开发完全手册》 其他《linux设备驱动程序》第三版 平台: JZ2440、mini2440或TQ2440 交叉网线和miniUSB PC机(windows系统和Vmware下的ubuntu12.04) 一、交叉编译环境的选型 具体的安装交叉编译工具,网上很多资料都有,我的那篇《arm-linux- gcc交叉环境相关知识》也有介绍,这里我只是想提示大家:构建跟文件系统中所用到的lib库一定要是本系统Ubuntu中的交叉编译环境arm-linux- gcc中的。即如果电脑ubuntu中的交叉编译环境为arm-linux-
二、主机、开发板和虚拟机要三者互通 w IP v2.0》一文中有详细的操作步骤,不再赘述。 linux 2.6.22.6_jz2440.patch组合而来,具体操作: 1. 解压缩内核和其补丁包 tar xjvf linux-2.6.22.6.tar.bz2 # 解压内核 tar xjvf linux-2.6.22.6_jz2440.tar.bz2 # 解压补丁
cd linux_2.6.22.6 patch –p1 < ../linux-2.6.22.6_jz2440.patch 3. 配置 在内核目录下执行make 2410_defconfig生成配置菜单,至于怎么配置,《嵌入式linux应用开发完全手册》有详细介绍。 4. 生成uImage make uImage 四、移植busybox 在我们的根文件系统中的/bin和/sbin目录下有各种命令的应用程序,而这些程序在嵌入式系统中都是通过busybox来构建的,每一个命令实际上都是一个指向bu sybox的链接,busybox通过传入的参数来决定进行何种命令操作。 1)配置busybox 解压busybox-1.7.0,然后进入该目录,使用make menuconfig进行配置。这里我们这配置两项 一是在编译选项选择动态库编译,当然你也可以选择静态,不过那样构建的根文件系统会比动态编译的的大。 ->Busybox Settings ->Build Options
嵌入式培训专家
Linux网络设备驱动
主讲:宋宝华
https://www.doczj.com/doc/4a11124177.html,
华清远见
今天的内容
vLinux网络设备驱动架构 vLinux网络设备驱动数据流程
? NON-NAPI模式数据接收流程 ? NAPI模式数据接收流程 ? 数据发送流程
vLinux网络协议栈的实现
? TCP/UDP/IP/MAC各层数据传递 ? 网络系统调用与socket
华清远见
Linux网络设备驱动架构
华清远见
net_device
struct net_device_ops { int (*ndo_open)(struct net_device *dev); int (*ndo_start_xmit) (struct sk_buff *skb, struct net_device *dev); int (*ndo_set_mac_address)(struct net_device *dev, void *addr); int (*ndo_do_ioctl)(struct net_device *dev, struct ifreq *ifr, int cmd); void (*ndo_tx_timeout) (struct net_device *dev); ... }
struct net_device { struct net_device_stats stats; const struct net_device_ops *netdev_ops; const struct ethtool_ops *ethtool_ops; ... }
struct ethtool_ops { int (*get_settings)(struct net_device *, struct ethtool_cmd *); int (*set_settings)(struct net_device *, struct ethtool_cmd *); void (*get_drvinfo)(struct net_device *, struct ethtool_drvinfo *); int (*get_regs_len)(struct net_device *); ... }
第一章Linux设备驱动程序简介 Linux Kernel 系统架构图 一、驱动程序的特点 ?是应用和硬件设备之间的一个软件层。 ?这个软件层一般在内核中实现 ?设备驱动程序的作用在于提供机制,而不是提供策略,编写访问硬件的内核代码时不要给用户强加任何策略 o机制:驱动程序能实现什么功能。 o策略:用户如何使用这些功能。 二、设备驱动分类和内核模块 ?设备驱动类型。Linux 系统将设备驱动分成三种类型 o字符设备 o块设备 o网络设备 ?内核模块:内核模块是内核提供的一种可以动态加载功能单元来扩展内核功能的机制,类似于软件中的插件机制。这种功能单元叫内核模块。 ?通常为每个驱动创建一个不同的模块,而不在一个模块中实现多个设备驱动,从而实现良好的伸缩性和扩展性。 三、字符设备 ?字符设备是个能够象字节流<比如文件)一样访问的设备,由字符设备驱动程序来实现这种特性。通过/dev下的字符设备文件来访问。字符设备驱动程序通常至少需要实现 open、close、read 和 write 等系统调用 所对应的对该硬件进行操作的功能函数。 ?应用程序调用system call<系统调用),例如:read、write,将会导致操作系统执行上层功能组件的代码,这些代码会处理内核的一些内部 事务,为操作硬件做好准备,然后就会调用驱动程序中实现的对硬件进 行物理操作的函数,从而完成对硬件的驱动,然后返回操作系统上层功 能组件的代码,做好内核内部的善后事务,最后返回应用程序。 ?由于应用程序必须使用/dev目录下的设备文件<参见open调用的第1个参数),所以该设备文件必须事先创建。谁创建设备文件呢? ?大多数字符设备是个只能顺序访问的数据通道,不能前后移动访问指针,这点和文件不同。比如串口驱动,只能顺序的读写设备。然而,也 存在和数据区或者文件特性类似的字符设备,访问它们时可前后移动访
L i n u x驱动基础试题(时间:1个小时) 一、选择题(每题4分,共40分,包括单选和多选,多选、少选均不得分) 1.Linux系统中将设备进行分类管理,下列设备中(ACD)属于字符设备,(BC)属于块设备 [A]键盘[B]硬盘[C]闪存设备[D]帧缓存设备[E]网卡 2.Linux系统中,内核以(D)区分设备 [A]设备节点名[B]设备节点号[C]设备名称[D]设备号 3.Linux系统中设备节点可以创建在(A) [A]/dev目录下[B]根目录下[C]/tmp目录下[E]以上都可以 4.Linux驱动程序运行在(A) [A]内核空间[B]用户空间[C]用户空间和内核空间 5.Linux系统中设备驱动程序是以模块形式组织的,编译驱动时可以用哪种方式编译(AB) [A]静态编译进内核[B]动态编译 6.内核中,设备的主设备号用(B)位来表示,次设备号用(D)位来表示 [A]8[B]12[C]16[D]20[E]24[F]32 7.Linux系统中哪些种类的设备有设备节点(BD) [A]定时器[B]字符设备[C]块设备[D]网络设备 8.通常情况下,kmalloc函数能分配的最大内存是(C) [A]4K[B]64K[C]128K[D]4M 9.能保证物理空间上连续的内存分配函数是(AB) [A]__get_free_pages[B]kmalloc[C]vmalloc[D]malloc 10.Linux系统中通过add_timer添加的timer是(A) [A]一次的[B]循环的[C]以上两种都可以 二、简答题(每题6分,共60分) 系统中以模块方式组织设备驱动程序,请列举在一个模块程序中必不可少的组成部分。(可以写个Helloworld模块的程序) 2.请从定义、性质、操作方式等方面对比说明字符设备和块设备。 3.请列举Linux设备驱动程序中,程序延缓执行的机制。 4.简述Linux设备驱动中使用中断的步骤。 5.简述信号量和自旋锁的异同和使用时的注意事项。 6.简述命令mknod/dev/zeroc15的做用和命令各个部分的含义,并写出创建一个块设备节点的命令。 7.简述命令insmod,rmmod,lsmod的功能。 8.驱动程序中采用动态申请设备号的,我们如何得到对应设备的设备号? 9.简述设备驱动程序和普通应用程序的异同点。 10.简述mmap机制的作用和使用mmap的好处。
文库资料?2017 Guangzhou ZHIYUAN Electronics Stock Co., Ltd. 如何实现Linux 设备驱动模型 设备驱动模型,对系统的所有设备和驱动进行了抽象,形成了复杂的设备树型结构,采用面向对象的方法,抽象出了device 设备、driver 驱动、bus 总线和class 类等概念,所有已经注册的设备和驱动都挂在总线上,总线来完成设备和驱动之间的匹配。总线、设备、驱动以及类之间的关系错综复杂,在Linux 内核中通过kobject 、kset 和subsys 来进行管理,驱动编写可以忽略这些管理机制的具体实现。 设备驱动模型的内部结构还在不停的发生改变,如device 、driver 、bus 等数据结构在不同版本都有差异,但是基于设备驱动模型编程的结构基本还是统一的。 Linux 设备驱动模型是Linux 驱动编程的高级内容,这一节只对device 、driver 等这些基本概念作介绍,便于阅读和理解内核中的代码。实际上,具体驱动也不会孤立的使用这些概念,这些概念都融合在更高层的驱动子系统中。对于大多数读者可以忽略这一节内容。 1.1.1 设备 在Linux 设备驱动模型中,底层用device 结构来描述所管理的设备。device 结构在文件
龙源期刊网 https://www.doczj.com/doc/4a11124177.html, Linux 系统下4G 终端模块驱动的实现 作者:邹龙王德志刘忠诚周治坤 来源:《电脑知识与技术》2015年第28期 摘要:文章分析了Linux系统的设备驱动原理,USB接口设备的驱动程序编写与内核编译原理,结合实例完成了4G模块的驱动程序与内核编译,并对编译后的Linux系统进行了验证,验证了系统内核能够正确识别4G模块并分配内存,成功实现了Linux系统的4G模块驱动。 关键词:Linux;设备驱动;4G;USB 中图分类号:TP391 文献标识码:A 文章编号:1009-3044(2015)27-0206-04 Abstract: The device driver of Linux system is analyzed, and the USB interface device driver is compiled with the kernel principle. The 4G module is compiled with an example. The Linux system is verified by the 4G system. The system kernel can correctly identify the 4G module and allocate memory.. Key words: Linux; device driver; 4G; USB Linux系统以其良好的可剪裁性、强稳定性以及易操作等特点,已在物联网,程序控制,电子消费,智能家居等领域得到广泛的使用。4G网络的推广和应用也在各领域展开。因此,将Linux设备与4G网络有机地结合起来,为新一代物联网构造一个更加高速,更加安全,更加稳定的网络通信环境,将会成为一个应用热点。 本文介绍了一种Linux系统驱动4G模块的方法,Linux系统通过USB接口驱动4G终端 模块,实现4G网络的接入。首先,文章介绍了整体的软硬件应用环境,然后分析了Linux系统下的设备驱动以及USB接口设备驱动的编写原理,完成了4G终端模块在Linux系统中的驱动程序编写和内核编译,并且最后对驱动的内核烧入进行了验证性测试。 1 Linux系统设备驱动原理 当一个新的硬件设备接入Linux系统时[1],我们需要加载与其对应的驱动程序,之后驱动程序会根据自己的类型向Linux系统注册,注册成功后系统会为驱动程序配置与其类型相应的软件接口以及反馈一个主设备号给驱动程序,然后驱动程序会根据这个主设备号在/dev目录下创建一个设备文件,这样,我们就可以通过这个设备文件来对接入的硬件设备进行控制了。 1.1 Linux系统设备驱动类型
Linux设备驱动程序简介 Linux是Unix操作系统的一种变种,在Linux下编写驱动程序的原理和思想完全类似于其他的Unix系统,但它dos或window环境下的驱动程序有很大的区别。在Linux环境下设计驱动程序,思想简洁,操作方便,功能也很强大,但是支持函数少,只能依赖kernel 中的函数,有些常用的操作要自己来编写,而且调试也不方便。本人这几周来为实验室自行研制的一块多媒体卡编制了驱动程序,获得了一些经验,愿与Linux fans共享,有不当之处,请予指正。 以下的一些文字主要来源于khg,johnsonm的Write linux device driver,Brennan's Guide to Inline Assembly,The Linux A-Z,还有清华BBS上的有关device driver的一些资料. 这些资料有的已经过时,有的还有一些错误,我依据自己的试验结果进行了修正. 一、Linux device driver 的概念 系统调用是操作系统内核和应用程序之间的接口,设备驱动程序是操作系统内核和机器硬件之间的接口.设备驱动程序为应用程序屏蔽了硬件的细节,这样在应用程序看来,硬件设备只是一个设备文件,应用程序可以象操作普通文件一样对硬件设备进行操作.设备驱动程序是内核的一部分,它完成以下的功能: 1.对设备初始化和释放. 2.把数据从内核传送到硬件和从硬件读取数据. 3.读取应用程序传送给设备文件的数据和回送应用程序请求的数据. 4.检测和处理设备出现的错误. 在Linux操作系统下有两类主要的设备文件类型,一种是字符设备,另一种是块设备.字符设备和块设备的主要区别是:在对字符设备发出读/写请求时,实际的硬件I/O一般就紧接着发生了,块设备则不然,它利用一块系统内存作缓冲区,当用户进程对设备请求能满足用户的要求,就返回请求的数据,如果不能,就调用请求函数来进行实际的I/O操作.块设备是主要针对磁盘等慢速设备设计的,以免耗费过多的CPU时间来等待. 已经提到,用户进程是通过设备文件来与实际的硬件打交道.每个设备文件都都有其文件属性(c/b),表示是字符设备还蔤强樯璞?另外每个文件都有两个设备号,第一个是主设备号,标识驱动程序,第二个是从设备号,标识使用同一个设备驱动程序的不同的硬件设备,比如有两个软盘,就可以用从设备号来区分他们.设备文件的的主设备号必须与设备驱动程序在登记时申请的主设备号一致,否则用户进程将无法访问到驱动程序. 最后必须提到的是,在用户进程调用驱动程序时,系统进入核心态,这时不再是抢先式调度.也就是说,系统必须在你的驱动程序的子函数返回后才能进行其他的工作.如果你的驱动程序陷入死循环,不幸的是你只有重新启动机器了,然后就是漫长的fsck. 读/写时,它首先察看缓冲区的内容,如果缓冲区的数据 如何编写Linux操作系统下的设备驱动程序 二、实例剖析 我们来写一个最简单的字符设备驱动程序。虽然它什么也不做,但是通过它可以了解Linux的设备驱动程序的工作原理.把下面的C代码输入机器,你就会获得一个真正的设备驱动程序.不过我的kernel是2.0.34,在低版本的kernel上可能会出现问题,我还没测试过. [code]#define __NO_VERSION__
《LINUX设备驱动程序》阅读笔记 目录 第1章:设备驱动程序简介 (1) 第2章:构造和运行模块 (1) 第3章:字符设备驱动程序 (1) 第4章:调试技术 (2) 第5章:并发和竞态 (2) 第6章:高级字符驱动程序操作 (3) 第7章:时间、延迟及延缓操作 (3) 第8章:分配内存 (3) 第9章:与硬件通信 (4) 第10章:中断处理 (4) 第11章:内核的数据类型 (4) 第12章:PCI 驱动程序 (5) 第13章:USB 驱动程序 (5) 第14章:Linux 设备模型 (5) 第15章:内存映射和 DMA (5) 第16章:块设备驱动程序 (6) 第17章:网络驱动程序 (6) 第18章:TTY 驱动程序 (6) 第1章:设备驱动程序简介 1、“通常,设备驱动程序就是这个进入Linux内核世界的大门”,“设备驱动程序在Linux 内核中扮演着特殊的角色,它们是一个个独立的黑盒子,使某个特定硬件响应一个定义良好的内部编程接口,这些接口完全隐藏了设备的工作细节。用户的操作通过一组标准化的调用执行,而这些调用独立于特定的驱动程序”。 2、Linux系统将设备分成三种基本类型:字符设备、块设备和网络设备。 第2章:构造和运行模块 1、“内核黑客通常拥有一个‘牺牲用的’系统,用于测试新的代码”。 2、模块在被使用之前需要注册,而退出时要仔细撤销初始化函数所做的一切。驱动模块只能调用由内核导出的那些函数。 3、公共内核符号表中包含了所有的全局内核项(即函数和变量)的地址。当模块被装入内核后,它所导出的任何符号都会变成内核符号表的一部分。 第3章:字符设备驱动程序 第一节-主设备号和次设备号。对字符设备的访问都是通过文件系统内的设备名称进行的。通常而言,主设备号标识设备对应的驱动程序,而次设备号用于正确确定设备文件所指的设备。对应的数据结构为dev_t 类型。分配设备号使用函数alloc_chrdev_region() ,释放就使用unregister_chrdev_region() 函数。 第二节-一些重要的数据结构。大部分基本的驱动程序的操作都要涉及到三个重要的内