如何使用全站仪进行三角高程测量
【内容提要】使用跟踪杆配合全站仪测量高程的方法越来越普及,使用传统的三角高程测量方法已经显示出了他的局限性。经过长期摸索,总结出一种新的方法进行三角高程测量。这种方法既结合了水准测量的任一置站的特点,又减少了三角高程的误差来源,同时每次测量时还不必量取仪器高、棱镜高。使三角高程测量精度进一步提高,施测速度更快。
在工程的施工过程中,常常涉及到高程测量。传统的测量方法是水准测量、三角高程测量。两种方法虽然各有特色,但都存在着不足。水准测量是一种直接测高法,测定高差的精度是较高的,但水准测量受地形起伏的限制,外业工作量大,施测速度较慢。三角高程测量是一种间接测高法,它不受地形起伏的限制,且施测速度较快。在大比例地形图测绘、线型工程、管网工程等工程测量中广泛应用。但精度较低,且每次测量都得量取仪器高,棱镜高。麻烦而且增加了误差来源。
随着全站仪的广泛使用,使用跟踪杆配合全站仪测量高程的方法越来越普及,使用传统的三角高程测量方法已经显示出了他的局限性。经过长期摸索,总结出一种新的方法进行三角高程测量。这种方法既结合了水准测量的任一置站的特点,又减少了三角高程的误差来源,同时每次测量时还不必量取仪器高、棱镜高。使三角高程测量精度进一步提高,施测速度更快。
一、三角高程测量的传统方法
如图一所示,设A,B为地面上高度不同的两点。已知A点高程H
A,
只要知道A
点对B点的高差H
A B 即可由H
B
=H
A
+H
A B
得到B点的高程H
B。
高程基准面
α
A B
i
V HA
t
hAB
HB
过A点的水平面
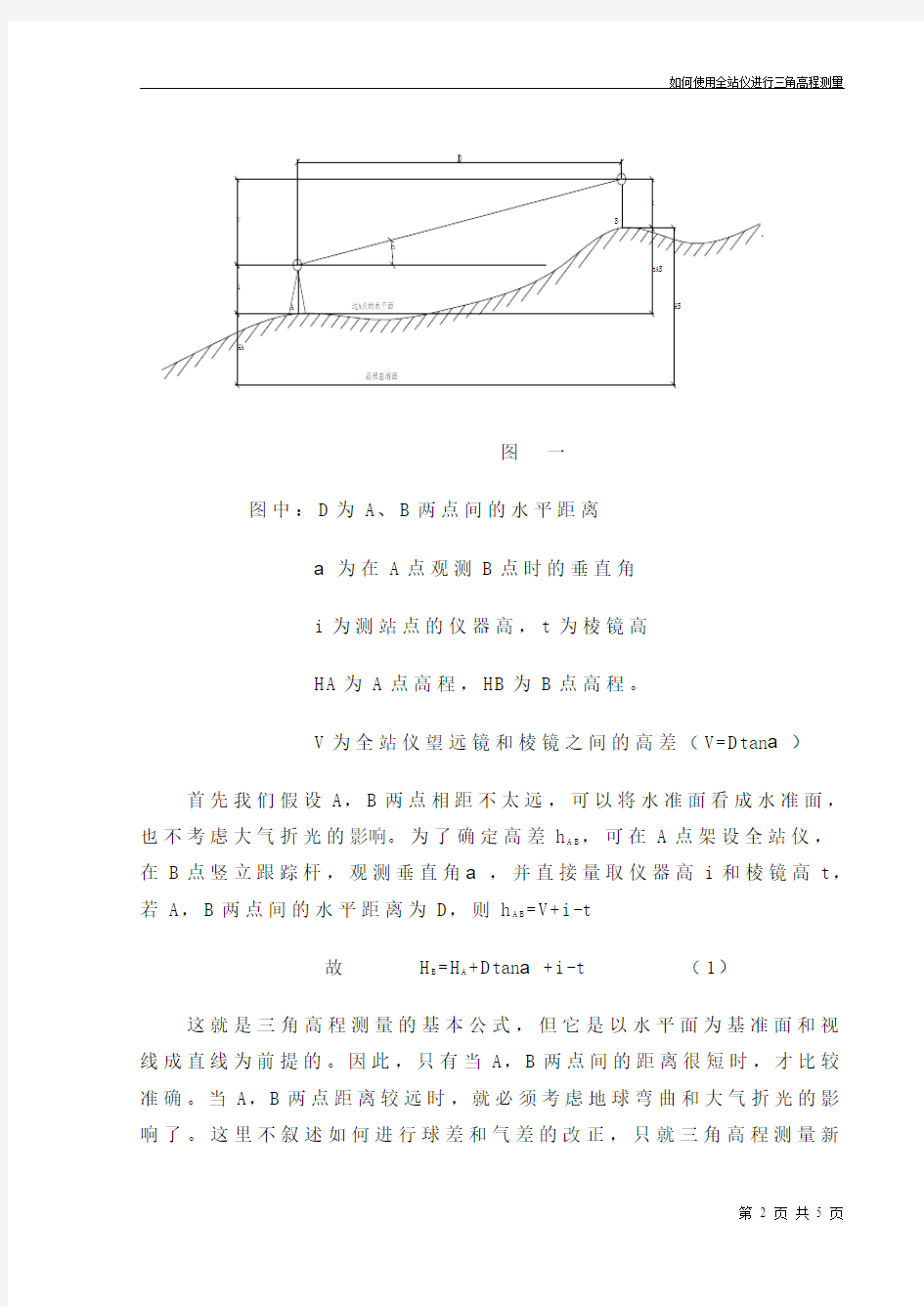
图 一
图中:D 为A 、B 两点间的水平距离
а为在A 点观测B 点时的垂直角
i 为测站点的仪器高,t 为棱镜高
H A 为A 点高程,HB 为B 点高程。
V 为全站仪望远镜和棱镜之间的高差(V=D tan а)
首先我们假设A ,B 两点相距不太远,可以将水准面看成水准面,也不考虑大气折光的影响。为了确定高差h A B ,可在A 点架设全站仪,
在B 点竖立跟踪杆,观测垂直角а,并直接量取仪器高i 和棱镜高t ,若A ,B 两点间的水平距离为D ,则h A B =V+i -t
故 H B =H A +D tan а+i -t (1)
这就是三角高程测量的基本公式,但它是以水平面为基准面和视
线成直线为前提的。因此,只有当A ,B 两点间的距离很短时,才比较准确。当A ,B 两点距离较远时,就必须考虑地球弯曲和大气折光的影响了。这里不叙述如何进行球差和气差的改正,只就三角高程测量新
全站仪测量高程 量仪器高法: 就是在设站的时候量取仪器高,输入仪器高,菱镜高即可,量仪器高的时候是从已知高程控制点量到仪器中心的距离,并不是地面到仪器中心的距离。 这种方法不建议使用,如果对标高要求不高的话可以使用。例如地形图的测绘可以使用。 测量高差法: 如果对坐标没有要求,只需要测出高程,那不需要架设在控制点上,随便找个位置整平即可,先在已知高程点上测一下,仪器会显示出X Y Z,X和Y不管,只看Z。记下Z的数据,然后再拿去待测点测一下,同理记下Z的数据。求出这两个数据的差值就可以算出待测点的高程,比如;已知高程42米,在已知点的读数5.263,待测点的读数4.263。那待测点的高程就是41米。有时候仪器会显示负的读数,没关系,同理即可!需要记住的是菱镜高不能变动。 这种方法的使用原来跟水准仪一样了。测量精度较高,推进使用。特别适用于深基坑的高程测量。 改变仪器高法: 如果你有已知高程点32米,那你就把仪器高设置32左右,随便设,把菱镜立在已知高程点上,测一下,如果仪器显示比已知高程点高了,你就把仪器高改一下。举例说明;已知高程点35.5米,仪器整平,进入测量界面,输入仪器高36米(有的仪器在测量界面就可以直接输入,有的要在后视界面设置),菱镜高输入1.2米(一般是1.2米,随便输入也可以)。然后把菱镜立在已知高程点上测一下,仪器显示34.8米,说明比已知高程低了.7米,那就把仪器高升高0.7米,改为36.7米,在测一下,仪器显示35.5米,那说明测量对了(如果不对,那还得试一下。反正总可以弄到和已知高程点一样的,摸索摸索!),想测什么就测什么了。这种方法也很好用。 最后说明一下,全站仪测量高程的精度没有水准仪高,因为仪器瞄准的时候是尽可能的瞄准菱镜中心,如果上下移动一点对高程都有影响。测量距离远的话更是不准。大概是2CM左右。建议不在迫不得已的时候不要使用全站仪测量精度要求高的点。
应用全站仪进行三角高程测量的新方 在工程的施工过程中,常常涉及到高程测量。传统的测量方法是水准测量、三角高程测量。两种方法虽然各有特色,但都存在着不足。水准测量是一种直接测高法,测定高差的精度是较高的,但水准测量受地形起伏的限制,外业工作量大,施测速度较慢。三角高程测量是一种间接测高法,它不受地形起伏的限制,且施测速度较快。在大比例地形图测绘、线型工程、管网工程等工程测量中广泛应用。但精度较低,且每次测量都得量取仪器高,棱镜高。麻烦而且增加了误差来源。 随着全站仪的广泛使用,使用跟踪杆配合全站仪测量高程的方法越来越普及,使用传统的三角高程测量方法已经显示出了他的局限性。经过长期摸索,总结出一种新的方法进行三角高程测量。这种方法既结合了水准测量的任一置站的特点,又减少了三角高程的误差来源,同时每次测量时还不必量取仪器高、棱镜高。使三角高程测量精度进一步提高,施测速度更快。 一、三角高程测量的传统方法 如图一所示,设A,B为地面上高度不同的两点。已知A点高程H A,只要知道A 点对B点的高差H AB即可由H B=H A+H AB得到B点的高程H B。 此主题相关图片如下: 图中:D为A、B两点间的水平距离 а为在A点观测B点时的垂直角 i为测站点的仪器高,t为棱镜高
HA为A点高程,HB为B点高程。 V为全站仪望远镜和棱镜之间的高差(V=Dtanа) 首先我们假设A,B两点相距不太远,可以将水准面看成水准面,也不考虑大气折光的影响。为了确定高差h AB,可在A点架设全站仪,在B点竖立跟踪杆,观测垂直角а,并直接量取仪器高i和棱镜高t,若A,B两点间的水平距离为D,则h AB=V+i-t 故 H B=H A+Dtanа+i-t (1) 这就是三角高程测量的基本公式,但它是以水平面为基准面和视线成直线为前提的。因此,只有当A,B两点间的距离很短时,才比较准确。当A,B两点距离较远时,就必须考虑地球弯曲和大气折光的影响了。这里不叙述如何进行球差和气差的改正,只就三角高程测量新法的一般原理进行阐述。我们从传统的三角高程测量方法中我们可以看出,它具备以下两个特点: 1、全站仪必须架设在已知高程点上 2、要测出待测点的高程,必须量取仪器高和棱镜高。 二、三角高程测量的新方法 如果我们能将全站仪象水准仪一样任意置点,而不是将它置在已知高程点上,同时又在不量取仪器高和棱镜高的情况下,利用三角高程测量原理测出待测点的高程,那么施测的速度将更快。如图一,假设B点的高程已知,A点的高程为未知,这里要通过全站仪测定其它待测点的高程。首先由(1)式可知: H A=H B-(Dtanа+i-t) (2) 上式除了Dtanа即V的值可以用仪器直接测出外,i,t都是未知的。但有一点可以确定即仪器一旦置好,i值也将随之不变,同时选取跟踪杆作为反射棱镜,假定t值也固定不变。从(2)可知: H A+i-t=H B-Dtanа=W(3) 由(3)可知,基于上面的假设,H A+i-t在任一测站上也是固定不变的.而且可以计算出它的值W。 这一新方法的操作过程如下: 1、仪器任一置点,但所选点位要求能和已知高程点通视。 2、用仪器照准已知高程点,测出V的值,并算出W的值。(此时与仪器高程测定有关的常数如测站点高程,仪器高,棱镜高均为任一值。施测前不必设定。)
全站仪后方交会法步骤和 高程测量步骤 Revised final draft November 26, 2020
1、角度测量(angleobservation) (1)功能:可进行水平角、竖直角的测量。 (2)方法:与经纬仪相同,若要测出水平角∠AOB,则: 1)当精度要求不高时: 瞄准A点——置零(0SET)——瞄准B点,记下水平度盘HR的大小。 2)当精度要求高时:——可用测回法(methodofobservationset)。 操作步骤同用经纬仪操作一样,只是配置度盘时,按“置盘”(HSET)。 2、距离测量(distancemeasurement) PSM、PPM的设置——测距、测坐标、放样前。 1)棱镜常数(PSM)的设置。 一般:PRISM=0(原配棱镜),-30mm(国产棱镜) 2)大气改正数(PPM)(乘常数)的设置。 输入测量时的气温(TEMP)、气压(PRESS),或经计算后,输入PPM的值。 (1)功能:可测量平距HD、高差VD和斜距SD(全站仪镜点至棱镜镜点间高差及斜距) (2)方法:照准棱镜点,按“测量”(MEAS)。 3、坐标测量(coordinatemeasurement) (1)功能:可测量目标点的三维坐标(X,Y,H)。 (2)测量原理任意架仪器,先设置仪器高为0,棱镜高是多少就是多少,棱镜拿去直接放在已知点上测高差,测得的高差为棱镜头到仪器视线的高差,当然,有正有负了,然后拿出计算器用已
知点加上棱镜高,再加上或减去(因为有正有负)测得的高差就是仪器的视线高啊,因为仪器高为0,所以这个数字就是你的测站点高程,进测站点把它改成这个数字就行了,改完测站点了一般情况下都要打一下已知点复核一下。。。 若输入:方位角,测站坐标(,);测得:水平角和平距。则有: 方位角: 坐标: 若输入:测站S高程,测得:仪器高i,棱镜高v,平距,竖直角,则有: 高程: (3)方法: 输入测站S(X,Y,H),仪器高i,棱镜高v——瞄准后视点B,将水平度盘读数设置为——瞄准目标棱镜点T,按“测量”,即可显示点T的三维坐标。 4、点位放样(Layout) (1)功能:根据设计的待放样点P的坐标,在实地标出P点的平面位置及填挖高度。 (2)放样原理 1)在大致位置立棱镜,测出当前位置的坐标。 2)将当前坐标与待放样点的坐标相比较,得距离差值dD和角度差dHR或纵向差值ΔX和横向差值ΔY。 3)根据显示的dD、dHR或ΔX、ΔY,逐渐找到放样点的位置。
§4-6 三角高程测量 一、三角高程测量原理及公式 在山区或地形起伏较大的地区测定地面点高程时,采用水准测量进行高程测量一般难以进行,故实际工作中常采用三角高程测量的方法施测。 传统的经纬仪三角高程测量的原理如图4-12所示,设A点高程及AB两点间的距离已知,求B点高程。方法是,先在A点架设经纬仪,量取仪器高i;在B点竖立觇标(标杆), 并量取觇标高L,用经纬仪横丝瞄准其顶端,测定竖直角δ,则AB两点间的高差计算公式为: 故(4-11) 式中为A、B两点间的水平距离。 图4-12 三角高程测量原理 当A、B两点距离大于300m时,应考虑地球曲率和大气折光对高差的影响,所加的改正 数简称为两差改正: 设c为地球曲率改正,R为地球半径,则c的近似计算公式为: 设g为大气折光改正,则g的近似计算公式为: 因此两差改正为:,恒为正值。 采用光电三角高程测量方式,要比传统的三角高程测量精度高,因此目前生产中的三角高程测量多采用光电法。
采用光电测距仪测定两点的斜距S,则B点的高程计算公式为: (4-12) 为了消除一些外界误差对三角高程测量的影响,通常在两点间进行对向观测,即测定hAB 和hBA,最后取其平均值,由于hAB和hBA反号,因此可以抵销。 实际工作中,光电三角高程测量视距长度不应超过1km,垂直角不得超过15°。理论分析和实验结果都已证实,在地面坡度不超过8度,距离在1.5km以内,采取一定的措施,电磁波测距三角高程可以替代三、四等水准测量。当已知地面两点间的水平距离或采用光电三角高程测量方法时,垂直角的观测精度是影响三角高程测量的精度主要因素。 二、光电三角高程测量方法 光电三角高程测量需要依据规范要求进行,如《公路勘测规范》中光电三角高程测量具体要求见表4-6。 表4-6 光电三角高程测量技术要求 往返各 注:表4-6中为光电测距边长度。 对于单点的光电高程测量,为了提高观测精度和可靠性,一般在两个以上的已知高程点上设站对待测点进行观测,最后取高程的平均值作为所求点的高程。这种方法测量上称为独立交会光电高程测量。 光电三角高程测量也可采用路线测量方式,其布设形式同水准测量路线完全一样。 1.垂直角观测 垂直角观测应选择有利的观测时间进行,在日出后和日落前两小时内不宜观测。晴天观测时应给仪器打伞遮阳。垂直角观测方法有中丝法和三丝法。其中丝观测法记录和计算见表4-7。表4-7 中丝法垂直角观测表 点名泰山等级四等 天气晴观测吴明 成像清晰稳定仪器Laica 702 全站仪记录李平 仪器至标石面高1.553m 1.554 平均值1.554m 日期2006.3.1
全站仪进行高程测量的几个方法的探讨 王晓涛 摘要:全站仪在公路工程施工中的使用越来越普遍,利用全站仪测量高程,在施工中越来越受到关注。根据工程施工中的实践,总结出全站仪测量高程的几种方法,使全站仪三角高程测量精度进一步提高,提高了施测速度与准确性。 关键词:全站仪高程测量方法 在现有公路工程施工中,高程测量传统方法是水准测量、三角高程测量。两种方法各有利弊,水准测量是一种直接测量高程的方法,测量高差的精度较高,但受地形的影响大,转站多,施测速度慢。随着全站仪在公路施工广泛普及应用,用全站仪测量高程越来越受到施工测量人员的青睐。现就全站仪测量高程的几种方法结合施工过程中的实践,对传统方法和新方法 探讨一下。 一、利用三角高程测量的传统方法: D V t а i hAB HA HB 高程基准面 图中: D :为A、B两点间的水平距离 а:为A点观测B点时的垂直角 i 为测站点的仪器高 t :为棱镜高 HA:为A点高程 HB:为B点高程 V :为全站仪望远镜和棱镜之间的高差(V=D×tgа) 传统方法步骤: 在已知高程点A点架设仪器,量取仪器高i、棱镜高t,输入全站仪测得AB之间的平距D, 则HB高程为: HB=HA+D×tgа+i-t ① 此方法以水平面为基准面,只有当A、B两点的距离较近时,测量质量才比较准确,当距离远时还必须要考虑到地球曲率、大气折光对距离的影响。在人员量取仪器高、棱镜高时,量取数据误差大、精度不高,影响测量精度的误差来源比较多。而且传统方法进行高程测量,仪器必须架设在已知高程的点位上,必须量取仪器高、棱镜高。对要测点如果不通视的无法 施测,有一定的局限性。 二、利用新方法高程测量 内蒙古二赛一级公路二合同段地处平原微丘,线路全长61.343km,地势平坦。一些GPS高程控制点离路线较远,最远的有1.4km,这些都加大水准点复测以及施工过程中的水准点加密的工作量。由于施工工期紧、测量人员有限,采用新的全站仪测量高程,提高了施测速度 及精度,满足了工程进度的需要。 基本原理:
全站仪高程测量新方法 [导读]:使用棱镜配合全站仪测量高程的方法越来越普及,传统的三角高程测量方法已经显示出了局限性。经过长期的工作实践,总结出一种新的方法进行三角高程测量。 摘要:使用棱镜配合全站仪测量高程的方法越来越普及,传统的三角高程测量方法已经显示出了局限性。经过长期的工作实践,总结出一种新的方法进行三角高程测量。这种方法既结合了水准测量的任意置站的特点,又减少了三角高程的误差来源,同时毎次测量时还不必量取仪器高、棱镜高。该法使三角高程测量精度进一步提高,施测进度更快。 关键词:全站仪测量三角高程新方法 1引言 在长江下游丘陵地区测量过程中,全站仪测量技术被广泛应用,全站仪三角高程测量也得到普遍应用。传统的测量方法是水准测量、三角高程测量。两种方法虽然各有特色,但都存在着不足。水准测量是一种直接测高法,测定高差的精度是校高的,但水准测量受地起伏的限制,外业工作量大,施测速度校慢。三角高程测量是一种间接测高法,它不受地形起伏的限制,且施测速度校快。在大比例地形图测绘、线型工程、管网工程等工程测量中广泛应用。但精度校低,且每次测量都得量取仪器高、棱镜高,比校繁锁,而且增加了误差来源。随着全站仪的广泛使用,使用棱镜配合全站仪测量高程的方法越来越普及,传统的三角高程测量方法已径显示出了局限性。我们经过长期实践和摸索,总结出一种新的方法进行三角高程测量。这种方法既结合了水准测量的任意置站的特点,又减少了三角高程的误差来源,同时每次测量时还不必量取仪器高、棱镜高。该方法使三角高程测量精度进一并提高,施测速度更快。 2三角高程测量的传统方法 设A、B为地面上高度不同的两点。已知A点高程HA,只要知道A点对B点的高差HAB即可由HB=HA+HAB得到B点的高程HB。 D为A、B两点间的水平距离;α为在A点观测,B点时的垂直角;i为测站点的仪器高;t为棱镜高;HA 为A点高程,HB为B点高程V为全站仪望远镜和棱镜之间的高差(V=Dtanα); 首先我们假设A、B两点相距不太远,可以将水准面看成水平面,也不考虑大气折光的影。为了确定高差HAB,可在A点架设全站仪、在B点竖立棱镜,观测垂直角α,并直接量取仪器高i和棱镜高t,若A、B两点间的水平距离为D,则HAB=V+i-t,故 HB=HA+Dtanα+i-t(1) 这就是三角高程测量基本公式,但它是以水平面为基准和视线成直线为前提的。因此,只有当A、B两点间的距离很短时,才比较准确。当A、B两点距离较远时,就必须考虑地球弯曲和大气折光的影响。这里不叙述如何进行球差和气差的改正,只就三角高程测量新方法的一般原理进行闸述。从传统的三角高程测量方法中我们可以看出,它具备以下两个特点:a全站仪必须架设在已知高程点上;b要测出待测点的高程,必须量取仪器高和棱镜高。 3三角高程测量的新方法 如果我们能将全站仪像水准仪一样任意置点,而不是将它置在已知高程点上同时又,在不量取仪器高和棱镜高的情况下,利用三角高程测量原理测出待测点的高程,那么施测的速度将更快。如图所示,假设B点的高程为已知,A点的高程为未知,这里要通过全站仪测定其他待测点的高程。首先由式(1)可知:HA=HB-(Dtanα+i-t)(2) 上式除了Dtanα即V的值可以用仪器直接测出外,i、t都是未知的。但有一点可以确定,即仪器一旦置好,i值也将随之不变,同时选取棱镜作为反射,假定t值也固定不变。从式(2)可知: HA+i-t=HB-Dtanα=W(3) 由式(3)可知,基于上面的假设,HA+i-t在任一测站上也是固定不变的,而且可以计算出它的值W。 这一新方法的操作过程如下: a、仪器任意置点,但所选点位要求能和已知高程点通视。 b、用仪器照准已知高程点,测出V的值,并算出W的值(此时与仪器高程测定有关的常数如测站点高程、仪器高、棱镜高均为任意什值。施测前不必设定)。 c、将仪器测站点高程重新设定为W、仪器高和棱镜高设为0即可。 d、照准待测点测出其高程。
全站仪三角高程测量方案优化设计 论文:应用全站仪进行三角高程测量的新方法_建筑设计 关键字:全站仪三角高程测量新方法发布时间:08-29 10:54 应用全站仪进行三角高程测量的新方法 张英杰 摘要:使用跟踪杆配合全站仪测量高程的方法越来越普及,使用传统的三角高程测量方法已经显示出了他的局限性。经过长期摸索,总结出一种新的方法进行三角高程测量。这种方法既结合了水准测量的任一置站的特点,又减少了三角高程的误差来源,同时每次测量时还不必量取仪器高、棱镜高。使三角高程测量精度进一步提高,施测速度更快。 关键词:全站仪三角高程测量新方法 1引言 在工程的施工过程中,常常涉及到高程测量。传统的测量方法是水准测量、三角高程测量。水准测量是一种直接测高法,测定高差的精度是较高的,但水准测量受地形起伏的限制,外业工作量大,施测速度较慢。三角高程测量是一种间接测高法,它不受地形起伏的限制,且施测速度较快。广泛应用,但精度较低,且每次测量都得量取仪器高,棱镜高。麻烦而且增加了误差来源。 随着全站仪的广泛使用,使用跟踪杆配合全站仪测量高程的方法越来越普及,使用传统的三角高程测量方法已经显示出了他的局限性。经过长期摸索,总结出一种新的方法进行三角高程测量。这种方法既结合了水准测量的任一置站的特点,又减少了三角高程的误差来源,同时每次测量时还不必量取仪器高、棱镜高。使三角高程测量精度进一步提高,施测速度更快。 2 三角高程测量的传统方法 如图一所示,设A,B为地面上高度不同的两点。已知A点高程HA,只要知道A点对B点的高差HAB即可由HB=HA+ hAB得到B点的高程HB。
图一 图中: D为A、B两点间的水平距离 а为在A点观测B点时的垂直角 i为测站点的仪器高,t为棱镜高 HA为A点高程,HB为B点高程。 V为全站仪望远镜和棱镜之间的高差(V=Dtan а) 首先我们假设A,B两点相距不太远,可以将水准面看成水准面,也不考虑大气折光的影响。为了确定高差hAB,可在A点架设全站仪,在B点竖立跟踪杆,观测垂直角а,并直接量取仪器高i和棱镜高t,若A,B两点间的水平距离为D,则hAB=V+i-t 故 HB=HA+ Dtanа+ i-t (1) 这就是三角高程测量的基本公式,但它是以水平面为基准面和视线成直线为前提的。因此,只有当A,B两点间的距离很短时,才比较准确。当A,B两点距离较远时,就必须考虑地球弯曲和大气折光的影响了。这里不叙述如何进行球差和气差的改正,只就三角高程测量新法的一般原理进行阐述。我们从传统的三角高程测量方法中我们可以看出,它具备以下两个特点: 1、全站仪必须架设在已知高程点上 2、要测出待测点的高程,必须量取仪器高和棱镜高。 3 三角高程测量的新方法 如果我们能将全站仪像水准仪一样任意置点,而不是将它置在已知高程点上,同时又在不量取仪器高和棱镜高的情况下,利用三角高程测量原理测出待测点的高程,那么施测的速度将更快。如图一,假设B点的高程已知,A点的高程为未知,这里要通过全站仪测定其它待测点的高程。首先由(1)式可知: HA=HB-(Dtanа+i-t) (2)
使用全站仪快速测量巷道高差的方法求算待定点的高程时,只要测定两点间的高差,根据一个已知点高程,就可以推算出待定点的高程,这一测量过程称为高程测量。高程测量的实质就是高差测量。高程测量的常用方法有水准测量和三角高程测量。水准测量是利用水准尺配合水准仪提供水平视线来测定两点间高差的方法。水准测量具有较高的精度,因此是高程测量中最主要的方法。 一、水准测量原理 如下图所示,已知高程点A的高程为H A,欲求待定点B的高程H B。当两点相距较近时,在A、B两点中间安置一台水准仪,在A、B两点分别铅直竖立底部为零的水准尺,利用水准仪提供的水平视线在两尺上分别读得视线截尺读数a和b,由下图可知A、B两点间的高差为: h AB=a-b 则B点的高程为H B=H A+h AB a—已知高程点A上的水准尺读数,称为后视读数; b—待求高程点B上的水准尺读数,称为前视读数; A—为已知点,称为后视点;
B—为待测高程点,称为前视点。 用文字表示,高差=后视读数-前视读数。高差计算规定是后视读数减前视读数,为此高差有正负之分,高差为正(a>b时),即前视读数小,表示前视点比后视点高;高差为负(a<b时),即前视读数大,表示前视点比后视点低。 — 以上安置一次仪器测定两点高差的施测过程称为水准测量的基本 原理。 二、高程计算方法 测量工作中,根据不同的需要,高程的计算一般有两种方法,高差法和视线高法 1、高差法 利用两点间的高差计算未知点高程的方法,称为高差法。从上图中可以得出计算公式:H B=H A+h AB 或H B = H A +(a-b) 2、视线高法也称仪高法 当安置一次仪器,根据一个后视点的高程,需要测定多个前视点的高程时,利用仪器高程来计算多个未知点高程的方法,称为视线高法,也称为仪器高法。从上图中可以得出各未知点高程的计算公式为:视线高程:H i=H A+a B点高程:H B=H i-b 用文字表示,前视点高程等于仪高减去前视读数。仪高法是计算次仪高,就可以简便地测算几个前视点的高程。因此,当安置一次仪器时,同时需要测出数个前视点的高程时,使用仪高法是比较简便的。 三、水准仪测高差的缺点
如何使用全站仪进行三角高程测量 【内容提要】使用跟踪杆配合全站仪测量高程的方法越来越普及,使用传统的三角高程测量方法已经显示出了他的局限性。经过长期摸索,总结出一种新的方法进行三角高程测量。这种方法既结合了水准测量的任一置站的特点,又减少了三角高程的误差来源,同时每次测量时还不必量取仪器高、棱镜高。使三角高程测量精度进一步提高,施测速度更快。 在工程的施工过程中,常常涉及到高程测量。传统的测量方法是水准测量、三角高程测量。两种方法虽然各有特色,但都存在着不足。水准测量是一种直接测高法,测定高差的精度是较高的,但水准测量受地形起伏的限制,外业工作量大,施测速度较慢。三角高程测量是一种间接测高法,它不受地形起伏的限制,且施测速度较快。在大比例地形图测绘、线型工程、管网工程等工程测量中广泛应用。但精度较低,且每次测量都得量取仪器高,棱镜高。麻烦而且增加了误差来源。 随着全站仪的广泛使用,使用跟踪杆配合全站仪测量高程的方法越来越普及,使用传统的三角高程测量方法已经显示出了他的局限性。经过长期摸索,总结出一种新的方法进行三角高程测量。这种方法既结合了水准测量的任一置站的特点,又减少了三角高程的误差来源,同时每次测量时还不必量取仪器高、棱镜高。使三角高程测量精度进一步提高,施测速度更快。 一、三角高程测量的传统方法 如图一所示,设A,B为地面上高度不同的两点。已知A点高程H A, 只要知道A 点对B点的高差H A B 即可由H B =H A +H A B 得到B点的高程H B。
高程基准面 α A B i V HA t hAB HB 过A点的水平面 图 一 图中:D 为A 、B 两点间的水平距离 а为在A 点观测B 点时的垂直角 i 为测站点的仪器高,t 为棱镜高 H A 为A 点高程,HB 为B 点高程。 V 为全站仪望远镜和棱镜之间的高差(V=D tan а) 首先我们假设A ,B 两点相距不太远,可以将水准面看成水准面,也不考虑大气折光的影响。为了确定高差h A B ,可在A 点架设全站仪, 在B 点竖立跟踪杆,观测垂直角а,并直接量取仪器高i 和棱镜高t ,若A ,B 两点间的水平距离为D ,则h A B =V+i -t 故 H B =H A +D tan а+i -t (1) 这就是三角高程测量的基本公式,但它是以水平面为基准面和视 线成直线为前提的。因此,只有当A ,B 两点间的距离很短时,才比较准确。当A ,B 两点距离较远时,就必须考虑地球弯曲和大气折光的影响了。这里不叙述如何进行球差和气差的改正,只就三角高程测量新
很多朋友熟练使用全站仪,但是对全站仪测标高有点迷糊;下面我就我的一些经验作如下总结: 1、量仪器高;就是在设站的时候量取仪器高,输入仪器高,菱镜高即可,量仪器高的时候是从已知高程控制点量到仪器中心的距离,并不是地面到仪器中心的距离。这种方法不建议使用,如果对标高要求不高的话可以使用。 2、测高差;如果对坐标没有要求,只需要测出高程,那不需要架设在控制点上,随便找个位置整平即可,先在已知高程点上测一下,仪器会显示出X Y Z,X 和Y不管,只看Z。记下Z的数据,然后再拿去待测点测一下,同理记下Z的数据。求出这两个数据的差值就可以算出待测点的高程,比如;已知高程42米,在已知点的读数5.263,待测点的读数4.263。那待测点的高程就是41米。有时候仪器会显示负的读数,没关系,同理即可!需要记住的是菱镜高不能变动。这种方法的使用原来跟水准仪一样了。测量精度较高,推进使用。 3、改变仪器高;如果你有已知高程点32米,那你就把仪器高设置32左右,随便设,把菱镜立在已知高程点上,测一下,如果仪器显示比已知高程点高了,你
就把仪器高改一下。举例说明;已知高程点35.5米,仪器整平,进入测量界面,输入仪器高36米(有的仪器在测量界面就可以直接输入,有的要在后视界面设置),菱镜高输入1.2米(一般是1.2米,随便输入也可以)。然后把菱镜立在已知高程点上测一下,仪器显示34.8米,说明比已知高程低了.7米,那就把 仪器高升高0.7米,改为36.7米,在测一下,仪器显示35.5米,那说明测量对了(如果不对,那还得试一下。反正总可以弄到和已知高程点一样的,摸索摸索!),想测什么就测什么了。这种方法也很好用,各种仪器的操作方法不同,大家摸索一下。推进使用。 最后说明一下,全站仪测量高程的精度没有水准仪高,因为仪器瞄准的时候是尽可能的瞄准菱镜中心,如果上下移动一点对高程都有影响。测量距离远的话更是不准。大概是2CM左右。建议大家不在迫不得已的时候不要使用全站仪测量精度要求高的点。打的手疼了,喜欢的顶一下。 很多朋友熟练使用全站仪,但是对全站仪测标高有点迷糊;下面我就我的一些经验作如下总结:
全站仪测量高程到底有几种方法。 方法一:经典方法,全站仪在已知坐标(含高程)点上设站; 方法二:后方交会,全站仪在任意点上设站; 方法三:对边测量,全站仪测两点高差。 下面对三种方法进行阐述: 方法一:经典方法 先说方法一。说这个方法是经典方法,是因为: 1.其测量原理我们在学习经纬仪视距测量时就学习过,每种测量教材中都有;2.测量教材中有关全站仪高程测量原理,都按此原理进行阐述; 3.全站仪高程测量的相关设置,都按此原理进行的。 到底什么测量原理呢,我们来回顾一下,看下图: 我们从(1)式中可以发现,全站仪一旦设站完成,测站高程和仪器高度均为定值,若测量过程中不改变棱镜高度,则除了Ssina(即实测参数)外,等式右侧其它各参数之和均为恒等值,由此我们可以得出: 全站仪一旦设定,同时不再改变棱镜高度的话,全站仪对各点的测量高差,其实质是每个三角高差dZ的差值 这个结论我们先记住,它将是后面方法二和方法三的理论基础。 方法二:后方交会 说实话,我也不知道叫“后方交会”是否准确,因为这个名字一般是指:在全站仪平面测量时,全站仪自由设站,通过测量并输入测站外两个已知点的平面坐标,从而完成设站的工作。 而这里是指全站仪在高程测量前,全站仪自由设站,通过测量测站外一个已知高程点,再通过全站仪相关的设置,从而完成全站仪高程测量设站的工作。 我们还是继续对照着这张老图进行分析: 方法三:对边测量 方法三的测量方法是一个纯粹的高差测量,操作也相当简单:全站仪架设在任意位置,不做任何高程测量的设置(即测站高程、仪器高、棱镜高均使用仪器内存值),分别对两个点测量其三角高差dZ(要保证棱镜高度不变),两者之差即为两点之高差,跟水准测量的后视减前视相反,这里应该是前视减后视。其测量原理,在方法一中已经验证,在此不再赘述。 各种方法的适用情况: 方法都出来了,都有测量原理,都是可行的,如果硬要说哪种方法好,本身这个问题就是个伪问题,因为每种方法各有优势,如果不结合实际情况,便不能确定到底哪种方法要好。因此最后来谈谈各种方法的优势和不足,以及它们的适用情况。
三角高程测量代替三四等水准测量 (测量高级技师论文) 中铁十二局武广客运专线第六项目部
三角高程测量代替三四等水准测量 中铁十二局集团第四工程有限公司李宝康 [摘要]:随着电磁波测距技术发展,全站仪的不断普及,三角高程测量在控制测量和施工测量中应用越来越广泛,其精度可代替三、四等水准测量,值得推广。本文就三角高程测量在导线点、水准基点复测中详细介绍了它的利与弊以及消除误差的方法。 [关键词]:三角高程三四等水准测量全站仪大气折光 现我公司承揽的杭新景高速公路龙游支线建德段高速公路SLC1合同段,地处微丘陵地段,林木茂密、地形复杂、通视条件较差,依据《公路勘测规范》并根据现场实际情况,此次水准复测采用三角高程法测定。 1、基本原理 三角高程测量是根据两点间的距离(斜距)和竖直角来推算两点间的高差。 计算公式如下:h AB=S·Sinα+ i-v + f 公式中表示:S---测得两点间的斜距; i----仪器高; v----目标高; f----球气差改正数 f=p-r = 球差-气差= D2 /2R-D2·k/2R = (1-k)·D2/2R 公式中:D= S·COSα为两点间的水平距离;
k为大气折光系数; c为球气差系数,取k=0.13,则c=6.83×10-8/m。 随着全站仪在施工测量中的普及,现在用全站仪测高差(高程)已不再用光电测距仪那样测竖直角进行公式计算,而是把仪器高及目标高输入仪器后直接测的两点间的高差。 2、估算测距三角高程的精度 对公式h AB =S·Sinα+i-v+f 求微分: 得△h AB=△S·Sinα+D·△α/ρ+△i-△v+△f 按误差传播律得:m2h=Sin2α·m2s+ D2·m2α/ρ2+m2i+m2v+m2f 。 取α=30°,两点水平距离D=500m,测距精度2mm+2ppm,测竖直角精度m=±1.5"。则按三测回取平均的边长和竖直角观测中误差。 m s=±√22+12 /√3 =±1.3mm ,mα=±1.5"/√3 =±0.86" 公式m h2 = Sin2α·㎡s+D2·m2α/ρ2+m2 i+ m2v+m2f中第一项中误差m1= Sinα·m s=±0.7mm;第二项中误差m2=D·mα/ρ=±2.0mm;第三项四项中误差m i = m v=±1mm。至于m f 的大小,一般取k=0.13,而实际k 值随地区、气候、地面覆盖物和视线超出地面高度等条件不同而变化,难以精确确定其值。实验证明,k值在一天内的变化,大致在中午前后最小,在日出日落时最大,因而竖直角的观测时间最好选在地方时10~16时之间,一般k值约在0.08~0.14之间,取m k=±0.05,则上式最后一项为m f = m k·D2/2R=±1mm, 由于这项误差按距离的平方成正比增加,若D=1km则m f =±4mm。为了减少m f的数值,故把视线控制在500m以内是很重要的。
全站仪水平测量及计算公式 因为用全站仪(附加棱镜)、经纬仪(附加塔尺)测量高程,是根据两点间的距离和竖直角,应用三角公式计算两点的高差,用全站仪测定高程的方法通常称为三角高程测量(或称测距高程)。用全站仪测量高程的特点是,精度比用水准仪测量低,但是这种方法简便、灵活,受地形的限制小。因此通常用于山区的高程测量和地形测量。三角高程测量,一般应在一定密度的水准测量控制之下。通常三角高程测量是高程控制测量的一种补充手段,其精度应同同等级的水准测量相同。 当我们采用全站仪(光电测距仪)进行高程测量放样时,如图2-2所示,由于全站仪的视线不都在一个水平面上,而全站仪所读读数由正负之分,在进行高程测量放样计算时,我们输入的数据必须以全站仪所读读数实际输入,设后视点BM的高程为H0,在同一测站下(全站仪的仪器高恒
等),放样点的实测高程的计算公式(以下为棱镜高度保持不变的放样点高程推导公式)如下: = H0-h0 + v 视线高程H 视线 -hn-v =(H0-h0 + v)+ hn-v 放样点高程Hn = H 视线 = H0-h0 + hn 当棱镜高度改变时,设棱镜改变后的高度相对与后视时的高度改变值为w(改变后的高度减去棱镜初始高度),则放样点的的实测高程为:Hn = H0-h0 + hn-w。 为避免误差因距离的传递,各等级的三角高程测量必须限制一次传递高程的距离。三角高程测量路线的总长原则上可参考同等级的水准路线的长度,路线尽可能组成闭合多边形,以便对高差闭合差进行校核。 除以上介绍的基本方法外,采用全站仪测量高程中,视线高程有两种计算方法: 一、若已知置站点地面高程,则视线高程为“置站点地面高程与全站仪仪器高之和”。 二、若已知后视点地面高程,则视线高程为“后视点地面高程减去后视高差读数加上棱镜高度”。 以上两种方法计算的视线高程是相等的。由此可知,前视目标点的高程为“仪器视线高程加上前视高差读数减去棱镜高度”。
全站仪仪器高如何测量 Document number:NOCG-YUNOO-BUYTT-UU986-1986UT
全站仪仪器高如何测量1、肯定是竖直高度了。一般是量取斜距就可以了。这种量法不是很准确。我一般采用的是反测确定的。具体方法是:仪器高随便输,然后你测一水准高程点,根据测出的高程和那点实际高程差值再改动仪器测站高程直到你测出的那点高程和他实际高程相等算是全站仪高程设定结束。这个过程就免去了量取仪器高这个歩棸。但必须要有另外一水准点做水准后视。 2、仪器高是控制点到仪器中心的垂直距离。 3、我是直接量取斜值减2毫米。全站仪测高的误差比较大。如果比较精确的还是用水准仪。 4、斜线就可以了,一点误差影响不大。 5、仪器高是读盘中心到目标点的垂直距离。 6、直接测量因不是平面的关系,绝对存在误差,如果想消除误差,可以从多个方向测量,取其平均值 7、全站仪读盘中心在外面有条短横线约 从地面点用小钢尺量到那就可以虽然是斜距精度绝对满足要求 / 8、全站仪用尺量高都是斜高,都是从全站仪侧面十字线量到你仪器对中的点上。这没法避免的。还有一种办法,利用仪器里面的引进远程水准,可以自动算出垂高的。不用尺量,相对来就精度高一些。像日本尼康就有这个功能。 用全站仪怎么测高程,随意架设仪器不用输仪器高,直接测出高程的方法哪个 大侠给详细介绍一下谢谢啊 1、最简单的办法:随意设站,当然要整平好。如果不需要平面位置,连后视对准也不需要了。看任意一个已知高程的点,比如点A,它的高程为米(这时你没有输
入仪高和棱镜高,可能仪器上有之前的仪高输入和棱镜高,先不要管仪高,棱镜高在棱镜杆上有尺度,可以直接读取,输入棱镜高;也可以不修改棱镜高,但后面就不能随意拔长棱镜杆),好了,对准A点上的棱镜中心,测量,会显示一个不准确的坐标和高程,坐标不要去管它,因为不需要平面位置。这时显示的A点的高程为一不准确值,比如为米,也可能为其他值,总之,用这个值减去A点实际高程,比如米,好了,现在把测站的高程,也就是Z值减去米,重新输入。对准A点上的棱镜中心,测量,这时显示的就是A点的准确高程米。再测任意其他点,测出的就是较为准确的高程。这个误差就是仪器的水准测量误差了,还减少了钢尺量测仪高的误差。
全站仪任意点架设仪器测高程的各种方法 问题的分析 我个人认为,从大家热烈讨论的程度,从各抒己见阐述自己的方法来看,这个问题值得讨论,我对大家的回复都一一作了认真的阅读和理解,我觉得这个问题至少要敲定以下几点: 1.使用全站仪进行高程测量,到底有多少种可行的方法,相关的测量原理是什么? 2.每种方法的优势和不足是什么?各自适用性如何? 3.每种方法的测量精度如何? 我想,关于全站仪测量高程,若能细化为以上三点,并探索求解,就可以充分地说明,这个主题绝不“低级”。 现在我就来“摆摆龙门阵”,继续往下聊。 这里我只针对以上第1、2点做出阐述,第3点精度问题,以后有时间进一步琢磨了再专门说说。 全站仪高程测量的方法 全站仪测量高程到底有几种方法。根据我以往的理解,再参考了大家的热烈讨论,我个人认为,可以归结为三种,我暂且定义如下(并不一定地道,但大家能理解就行了) 方法一:经典方法,全站仪在已知坐标(含高程)点上设站; 方法二:后方交会,全站仪在任意点上设站; 方法三:对边测量,全站仪测两点高差。 本日志的开头,网友5678提出的方法就是方法二。 下面对三种方法进行阐述: 方法一:经典方法 先说方法一。说这个方法是经典方法,是因为: 1.其测量原理我们在学习经纬仪视距测量时就学习过,每种测量教材中都有; 2.测量教材中有关全站仪高程测量原理,都按此原理进行阐述;
3.全站仪高程测量的相关设置,都按此原理进行的。到底什么测量原理呢,我们来回顾一下,看下图:
我们从(1)式中可以发现,全站仪一旦设站完成,测站高程和仪器高度均为定值,若测量过程中不改变棱镜高度,则除了Ssina(即实测参数)外,等式右侧其它各参数之和均为恒等值,由此我们可以得出: 全站仪一旦设定,同时不再改变棱镜高度的话,全站仪对各点的测量高差,其实质是每个三角高差dZ的差值 这个结论我们先记住,它将是后面方法二和方法三的理论基础。 方法二:后方交会 说实话,我也不知道叫“后方交会”是否准确,因为这个名字一般是指:在全站仪平面测量时,全站仪自由设站,通过测量并输入测站外两个已知点的平面坐标,从而完成设站的工作。 而这里是指全站仪在高程测量前,全站仪自由设站,通过测量测站外一个已知高程点,再通过全站仪相关的设置,从而完成全站仪高程测量设站的工作。 我们还是继续对照着这张老图进行分析:
全站仪测量标高 1、量仪器高;就是在设站的时候量取仪器高,输入仪器高,菱镜高即可,量仪器高的时候是从已知高程控制点量到仪器中心的距离,并不是地面到仪器中心的距离。这种方法不建议使用,如果对标高要求不高的话可以使用。 2、测高差;如果对坐标没有要求,只需要测出高程,那不需要架设在控制点上,随便找个位置整平即可,先在已知高程点上测一下,仪器会显示出X Y Z,X 和Y不管,只看Z。记下Z的数据,然后再拿去待测点测一下,同理记下Z的数据。求出这两个数据的差值就可以算出待测点的高程,比如;已知高程42米,在已知点的读数5.263,待测点的读数4.263。那待测点的高程就是41米。有时候仪器会显示负的读数,没关系,同理即可!需要记住的是菱镜高不能变动。这种方法的使用原来跟水准仪一样了。测量精度较高,推进使用。 3、改变仪器高;如果你有已知高程点32米,那你就把仪器高设置32左右,随便设,把菱镜立在已知高程点上,测一下,如果仪器显示比已知高程点高了,你就把仪器高改一下。举例说明;已知高程点35.5米,
仪器整平,进入测量界面,输入仪器高36米(有的仪器在测量界面就可以直接输入,有的要在后视界面设置),菱镜高输入1.2米(一般是1.2米,随便输入也可以)。然后把菱镜立在已知高程点上测一下,仪器显示34.8米,说明比已知高程低了.7米,那就把仪器高升高0.7米,改为36.7米,在测一下,仪器显示35.5米,那说明测量对了(如果不对,那还得试一下。反正总可以弄到和已知高程点一样的,摸索摸索!),想测什么就测什么了。这种方法也很好用, 最后说明一下,全站仪测量高程的精度没有水准仪高,因为仪器瞄准的时候是尽可能的瞄准菱镜中心,如果上下移动一点对高程都有影响。测量距离远的话更是不准。大概是2CM左右。建议不在迫不得已的时候不要使用全站仪测量精度要求高的点。
应用全站仪进行三角高程测量的新方法 (2010-09-06 21:36:26) 转载 分类:建筑测绘仪器的使用 标签: 杂谈 摘要:使用跟踪杆配合全站仪测量高程的方法越来越普及,使用传统的三角高程测量方法已经显示出了他的局限性。经过长期摸索,总结出一种新的方法进行三角高程测量。这种方法既结合了水准测量的任一置站的特点,又减少了三角高程的误差来源,同时每次测量时还不必量取仪器高、棱镜高。使三角高程测量精度进一步提高,施测速度更快。 关键词:全站仪三角高程测量新方法 相关站中站:工程测量 在工程的施工过程中,常常涉及到高程测量。传统的测量方法是水准测量、三角高程测量。两种方法虽然各有特色,但都存在着不足。水准测量是一种直接测高法,测定高差的精度是较高的,但水准测量受地形起伏的限制,外业工作量大,施测速度较慢。三角高程测量是一种间接测高法,它不受地形起伏的限制,且施测速度较快。在大比例地形图测绘、线型工程、管网工程等工程测量中广泛应用。但精度较低,且每次测量都得量取仪器高,棱镜高。麻烦而且增加了误差来源。
随着全站仪的广泛使用,使用跟踪杆配合全站仪测量高程的方法越来越普及,使用传统的三角高程测量方法已经显示出了他的局限性。经过长期摸索,总结出一种新的方法进行三角高程测量。这种方法既结合了水准测量的任一置站的特点,又减少了三角高程的误差来源,同时每次测量时还不必量取仪器高、棱镜高。使三角高程测量精度进一步提高,施测速度更快。一、三角高程测量的传统方法 如图一所示,设A,B为地面上高度不同的两点。已知A点高程HA,只要知道A点对B点的高差HAB 即可由HB=HA+HAB得到B点的高程HB。 图一 图中:D为A、B两点间的水平距离 а为在A点观测B点时的垂直角 i为测站点的仪器高,t为棱镜高 HA为A点高程,HB为B点高程。 V为全站仪望远镜和棱镜之间的高差(V=Dtanа) 首先我们假设A,B两点相距不太远,可以将水准面看成水准面,也不考虑大气折光的影响。为了确定高差hAB,可在A点架设全站仪,在B点竖立跟踪杆,观测垂直角а,并直接量取仪器高i和棱镜高t,若A,
后视的目的是定向,只需要后视点的平面坐标,跟高程没关系,所以测量时后视点的高程可不用输入。 全站仪测高程是应用了三角高程原理,误差较大,需要连续的复测。 一、三角高程测量的传统方法 设A,B为地面上高度不同的两点。已知A点高程H A,只要知道A点对B点的高差h AB即可由HB=H A+h AB得到B点的高程H B。 D为A、B两点间的水平距离 α为在A点观测B点时的垂直角 i为测站点的仪器高,t为棱镜高 H A为A点高程,H B为B点高程。 V为全站仪望远镜和棱镜之间的高差(V=Dtanα)
首先我们假设A、B两点相距不远,不考虑大气折光的影响,为了确定高差h AB,可在A点架设全站仪,在B点竖立棱镜,观测垂直角α,并直接量取仪器高i和棱镜高t,若A,B两点间的水平距离为D,则h AB=V+i-t 故 H B=H A+Dtanа+i-t (1) 这就是三角高程测量的基本公式,但它是以水平面为基准面和视线成直线为前提的。因此,只有当A、B两点间的距离很短时,才比较准确。当A、B两点距离较远时,就必须考虑地球弯曲和大气折光的影响了。我们从传统的三角高程测量方法中我们可以看出,它具备以下两个特点: 1、全站仪必须架设在已知高程点上; 2、要测出待测点的高程,必须量取仪器高和棱镜高。 二、三角高程测量的新方法 如果我们能将全站仪像水准仪一样任意置点,而不是将它置在已知高程点上,同时又在不量取仪器高和棱镜高的情况下,利用三角高程测量原理测出待测点的高程,那么施测的速度将更快。 假设B点的高程已知,A点的高程为未知,这里要通过全站仪测定其它待测点的高程。首先由(1)式可知: H A=H B-(Dtanα+i-t) (2)