1概述
将神经网引入复杂过程控制系统,充分地利用专家知识或熟练操作者的经验,可以成功地解决理论精确模型难以建立这一困难。神经网的记忆学习能力使其在变工作状况、变负荷运行时自动找到最佳工作点。但神经网络的非线性建模和鲁棒性的优点的本质来源于神经网络学习训练过程中的随机统计和动态特性。如果输入样本的随机统计特性存在难以区分以致训练难以收敛,并且对于系统工作状态随时间发生变化的情况,这时运用单一的神经网络模型就无法有效完成最优控制的目的。本文正是基于对神经网络统计学习、动态学习的本质的分析,提出了模块化的神经网络模型,对大型燃煤锅炉供热这样的复杂系统,采取运行机理建模和神经网络建模相结合的方式,把输入样本空间进行划分,子样本空间对应不同的工况,实现基于混合专家网络的建模。
2燃煤供热控制原理
在集中供热的系统中,一般采用改变供水温度来实现供热量的控制,这就是所谓的质调节。热水采暖质调节的供水温度为:
Tg=TN+a(TP-TN+T
G
-T
H
2
)(1)
a=T
N
-T
W
T
N
+T
W
(2)
采暖系统的回水温度为:
Th=Tg-a(TG-TH)(3)
式中:
TW—室外空气采暖计算温度(℃);
TN—室内空气采暖计算温度(℃);
TG,TH—采暖系统设计供水、回水温度(℃);
Tw—室外实际空气温度(℃);
TP—散热器中的供水和回水的平均温度(℃);
a—热量比例变化系数;
Tg和Th—室外温度为Tw时,应送入系统的供水温度和回
水温度(℃)。
在实际生产过程中,操作人员根据上述公式计算出采暖系
统所在地区不同的室外空气温度下的供、回水温度,并把它们
绘制成运行曲线图或编制成表。在集中采暖期间,采暖锅炉房
的运行管理人员可以按曲线图或表中的指示调节供水温度。但
是,供暖系统煤、水、风的调节无法通过公式计算而获得,一般
根据现场专家的实践经验以及锅炉系统本身的运行机理进行
建模,然后对各种传感器输入数据进行处理,根据建模结果输
出到各控制环节。基于神经网络的建模方法是较常采用的方法。
3基于模块化神经网络的控制算法
神经网络在控制系统的建模、辨识和控制中都获得了广泛
的应用,已取得了许多成果,这种应用几乎覆盖了控制理论研一种基于混合建模的模块化神经网络控制方法
杜庆东1刘杰1赵海2
1(沈阳师范大学软件学院,沈阳110034)
2(东北大学信息学院,沈阳110006)
E-mail:duqingdong@126.com
摘要针对传统神经网络用于复杂过程系统的控制时难于收敛的问题,文章提出了基于混合建模的模块化的神经网络模型。采取运行机理建模和神经网络建模相结合的方式,把输入样本空间进行划分,实现基于混合专家网络的建模。
试验结果表明,对大型燃煤锅炉供热系统,文章提出的方法可以较好地提高供热系统的稳定性和供热质量。
关键词神经网络信息融合供热控制
文章编号1002-8331-(2006)11-0215-03文献标识码A中图分类号TP391
AModularNeuralNetworksControlMethod
BasedonHybridModeling
DuQingdong1LiuJie1ZhaoHai2
1(SchoolofSoftware,ShenyangNormalUniversity,Shenyang110034)
2(SchoolofInformation,NortheasternUniversity,Shenyang110006)Abstract:AgainstdifficultconvergenceproblemwhenthetraditionalNeuralNetworksareappliedtocomplexprocesssystem,ahybridexpertneuralnetworksmodelisbroughtforward.Inthenewmethod,inputsamplesaredividedintosub-spaceandhybridexpertneuralnetworksmodelisrealized.Theexperimentindicatesthatbetterstabilityandqualitycanbeobtainedthroughthenewneuralnetworksmodelinthehugecoal-burningboilerheatingsystem.
Keywords:neuralnetworks,informationfusion,heatingcontrol
基金项目:辽宁省教育厅青年基金资助项目(编号:2004F111);沈阳市重点基金资助项目(编号:1041020-1-06)
作者简介:杜庆东(1971-),博士,主要研究领域:信息融合、智能控制、神经网络等。赵海,教授,博士生导师。
215
计算机工程与应用2006.11
究中的绝大多数问题,如系统建模与辨识,PID参数的整定、极点配置、内膜控制、优化设计、滤波与预测、容错控制、模糊控制、专家控制和学习控制等。如在文献[5]中作者提出了一种基于FNN(模糊神经网络)的自适应融合与控制方法,即利用FNN实现多传感器信息的局部决策、全局融合,同时在线自适应调整FNN的参数和融合的权值,达到自适应融合和控制的目的。但该算法在学习过程中的实时调整导致模型难以收敛,神经网络参数与被控对象难以建立物理意义上的联系,再加上算法复杂以致模型调试过程难以控制,只能通过不断测试的方式来试探参数的合理性,实用性不强。
3.1神经网络学习特性分析
神经网络的学习过程可以看作是一个在多维空间的搜索过程,其目的是寻找一个使预定的目标函数(判据)达最优的解。在该框架下,一个连续时间的学习规则可当作一个一阶随机微分方程,它代表的是一个动态系统,学习机的状态则按此方程演变直到使目标函数达到最优的平衡状态。一般采用基于LMS原理或Hebb原理的学习规则。
神经网络学习理论两个重要基础是学习输入样本的统计特性和动态特性。根据Vapnik与Chervonenko的经验风险最小化理论[1,2],有下式成立:
P{sup
w∈W
|R(w)-Remp(w)|>ε},当N→∞时
其中wemp表示使经验风险Remp(w)最小化的权值。
上式的含义是在经验风险Remp(w)一致收敛于实际风险的条件下,R(wemp)以概率收敛于实际风险R(w)的可能最小值。即当样本趋于无穷时,使经验风险最小化的wemp对应的期望风险,也差不多是最小。
可见神经网络学习的本质是对输入样本统计特性的学习,而样本是无法穷尽的,所以必须通过动态学习的方式来提高神经网络的学习效率。
3.2传统神经网络学习过程的问题分析
当前的神经网络普遍存在局部极小和泛化能力不足的缺点,对此人们提出了各种改进的学习算法,如用遗传算法来优化BP神经网络的初始权值,仿真结果表明:这种方法可以降低BP神经网络陷入局部极小的可能性,并且可以有效地改善收敛速度;还有采用带有自适应动量项的变步长BP算法,可以降低BP神经网络陷入局部极小的可能性,并且可以有效地改善收敛速度[3,4]。这些改进算法的共同特点是对已有算法的计算环节的改进,缺少针对神经网络学习的本质,即统计功能和动态学习特性的深入研究和改进。本文认为解决局部极小和泛化能力不足的问题主要应从神经网络学习的基础即统计特性和动态特性着手,在本论文中充分应用多传感器的信息并进行融合来提高神经网络的统计特性,采取系统工作状态实时监控和工况检测的方式来激发神经网络的动态学习过程,从而提高神经网络的泛化能力。在沈阳圣达小区集中供热控制系统中的应用表明,采用新神经网络模型的控制算法优于传统基于BP神经网络的控制算法,节能效果明显。
神经网络建模是利用对象实际的输入和输出数据训练神经网络后得到的,但是这种建模的依据是测量数据,因此所形成的网络模型是经验性的,缺乏物理基础,使用时外推效果不理想,这是由神经网络学习的随机特性所决定的。此外,这种网络模型通常不能将实际系统的结构特性和工作原理融合在内,所以网络模型的预报有时会与实际系统的规律相矛盾,也就是说,神经网络建模方法存在泛化能力不足的缺点,这就要求提高神经网络的动态特性。本文结合被控对象的运行机理建立神经网络模型,通过传感器参数的变化来感知被控对象工况的变化,从而调整神经网络运行状态,这样便可以克服上述缺点。3.3基于模块化神经网络的建模
对于输入样本空间的随机统计比较复杂的学习过程,通过单一神经网络的学习很难达到系统要求的误差指标,为了更好地体现输入样本的随机统计特性,可以利用分而治之的思想,把一个复杂问题划分为几个简单的问题,再利用几个小的网络去解决,即模块化神经网络。在本文中采用具有并联结构的混合专家网络来完成锅炉供热系统的自动控制问题。
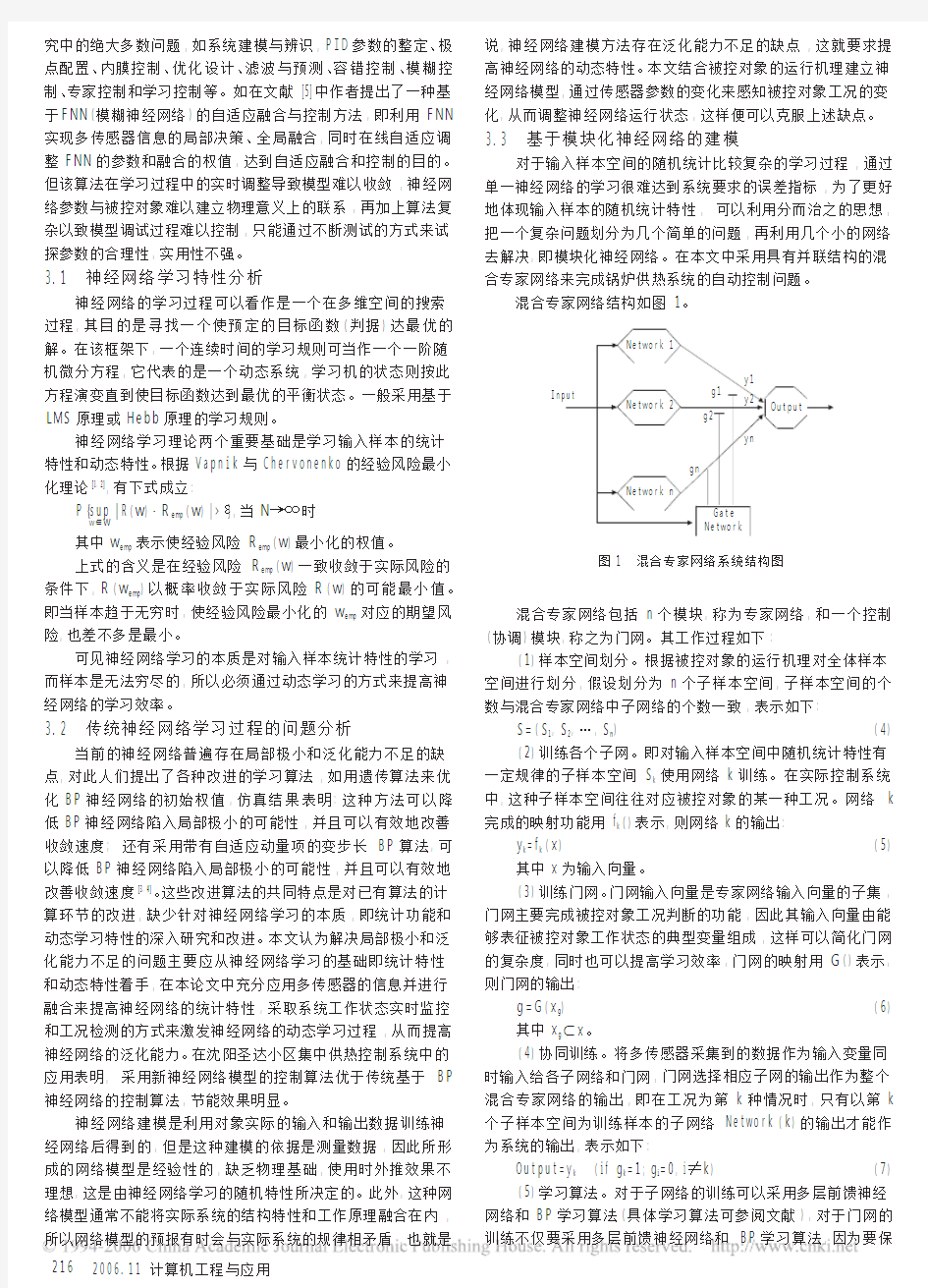
混合专家网络结构如图1。
混合专家网络包括n个模块,称为专家网络,和一个控制(协调)模块,称之为门网。其工作过程如下:
(1)样本空间划分。根据被控对象的运行机理对全体样本空间进行划分,假设划分为n个子样本空间,子样本空间的个数与混合专家网络中子网络的个数一致,表示如下:
S=(S1,S2,…,Sn)(4)(2)训练各个子网。即对输入样本空间中随机统计特性有一定规律的子样本空间Sk使用网络k训练。在实际控制系统中,这种子样本空间往往对应被控对象的某一种工况。网络k完成的映射功能用fk()表示,则网络k的输出:
yk=fk(x)(5)其中x为输入向量。
(3)训练门网。门网输入向量是专家网络输入向量的子集,门网主要完成被控对象工况判断的功能,因此其输入向量由能够表征被控对象工作状态的典型变量组成,这样可以简化门网的复杂度,同时也可以提高学习效率,门网的映射用G()表示,则门网的输出:
g=G(xg)(6)其中xg#x。
(4)协同训练。将多传感器采集到的数据作为输入变量同时输入给各子网络和门网,门网选择相应子网的输出作为整个混合专家网络的输出,即在工况为第k种情况时,只有以第k个子样本空间为训练样本的子网络Network(k)的输出才能作为系统的输出,表示如下:
Output=yk(ifgk=1;gi=0,i≠k)(7)(5)学习算法。对于子网络的训练可以采用多层前馈神经网络和BP学习算法(具体学习算法可参阅文献),对于门网的训练不仅要采用多层前馈神经网络和BP学习算法,因为要保
Network1
Network2
Networkn
Input
Output
y1
y2
yn
g1
g2
gn
Gate
Network
图1混合专家网络系统结构图
216
2006.11计算机工程与应用
计算机工程与应用2006.11(上接197页)
2003;(4):384~387
4.KNazarpour,ARSharafat,SMPFiroozabadi.SurfaceEMGSignalClassificationUsingaSelectiveMixofHigherOrderStatistics[C].In:Proceedingsofthe2005IEEEEngineeringinMedicineandBiology27thAnnualConference,2005:1060
5.DelucaC.Physiologyandmathematicsofmyoelectricsignals[J].IEEETransBiomedEng,1979;26(6):313 ̄325
6.LempelA,ZivJ.Onthecomplexityoffinitesequences[J].IEEETransInformationTheory,1976;22(1):75 ̄81
7.KasparF,SchusterHG.Easilycalculablemeasureforthecomplexityofspatiotemporalpatterns[J].PhysicalReviewA,1987;36(2):842 ̄8488.NelloCristianini,JohnAhawe-Taylor.李国正,王孟,曾华君译.AnIntroductiontosupportVectorMachineandOtherKernel-basedLearningMethod.支持向量机导论[M].电子工业出版社,2004:82 ̄108
表1
混合专家网络输入的传感器数据参数
序号1234567891011
输入变量出水温度回水温度引风压力鼓风压力出水流量炉排转速给煤室外温度炉膛温度排烟温度室内温度
专家子网√√√√√√√√√√√
门网√√√√√√
正常供热时的变化范围
70 ̄9050 ̄60-20Pa1.4MPa<650m3/h<70%
<20%-30 ̄-5600 ̄1100120 ̄20010 ̄20
证门网的输出向量中只能有1个元素为1,其它为0,所以还要在门网的输出采取竞争策略,保证输出的唯一性。
4试验结果
对锅炉控制系统采用质调节的控制方式。其中混合专家网
络的子网有11个输入(其中有温度、
压力、流量传感器变量以及负载状况,如表1),15个隐节点和4个输出(对应炉排转速、给煤转速、引风转速和鼓风转速)。共有3个网络专家网,1个门网(6个输入3个输出)。
根据燃煤锅炉供热系统的运行过程,可分为三种工况:加大供热量(如启炉操作)、保持供热量(如外界环境参数变化微小的正常供热阶段)、
减小供热量(如停炉操作)。相应地输入样本也划分为3个子样本空间,每个专家网络的训练对应一组子样本空间。试验结果如图2和图3。
现场试验结果表明,采用混合专家网络的控制输出稳定,变化幅度是采用传统网络模型的1/5,稳定输出就可以保证恒定的供热质量,而且也可减少能源浪费,提高供热效率。而如果
控制输出不稳定,很容易产生振荡现象,对系统安全和供热质量都有极大的危害。
5结论
对于复杂、非线性、大时滞系统,在运用常规的基于数学公
式的控制方案不奏效的场合,人们往往想到应用基于神经网络的控制模型,但神经网络的非线性建模和鲁棒优点的本质来源于神经网络学习训练过程中的随机、动态性质,如果输入样本的随机统计特性存在难以区分或训练难以收敛的时候,尤其对于系统工作状态随时间发生变化的时候,运用单一的神经网络模型就无法有效完成最优控制的目的。本文提出的神经网络建模方法较好地解决了上述问题。下一步的研究重点是对神经网络的学习算法进行进一步研究,以提高控制的准确性和自适应能力。(收稿日期:2005年9月)
参考文献
1.VapnikV.AnoverviewofstatisticalLearningTheory[J].IEEETrans
NN,1999;10:988 ̄999
2.VapnikVN,ChervonenkoAYa.OntheUniformConvergenceofRela-tiveFrequencyofEventstoTheirProbabilities[J].TheoryofProbabili-tyanditsApplications,1981;16:264 ̄280
3.BoYang,Xiao-HongSu,Ya-DongWang.MachineLearningandCy-bernetics[C].In:Proceedings,2002InternationalConferenceonNN,2002-11;1:64 ̄68
4.YangHuizhong,LiDanjing,TaoZhenlinetal.Variable-StepBPtrainingalgorithmwithanadaptivemomentumterm[C].In:IntelligentControlandAutomation,Proceedingsofthe4thWorldCongresson,2002-06;3:1961 ̄1965
5.郭丽梅,罗大庸.基于模糊神经网络的多传感器自适应融合[J].系统工程与电子技术,2004;(2):215 ̄219
.0.8.6.4.2.00
.2á???
???è
á?é ???è
室外温度/℃对应传统网络模型对应混合专家网络模型0
20
40
60
80
100120140时间/min
-17.0-17.2
-17.4-17.6-17.8-18.0-18.2
图2室外温度传感器的温度变化曲线
24
680
51.1
8出水温度/℃
1.15.6
9088
86848280780
20
40
60
80
100
120
140时间/min
图3锅炉供热系统的出水温度变化曲线
217
人工神经网络控制 摘要: 神经网络控制,即基于神经网络控制或简称神经控制,是指在控制系统中采用神经网络这一工具对难以精确描述的复杂的非线性对象进行建模,或充当控制器,或优化计算,或进行推理,或故障诊断等,亦即同时兼有上述某些功能的适应组合,将这样的系统统称为神经网络的控制系统。本文从人工神经网络,以及控制理论如何与神经网络相结合,详细的论述了神经网络控制的应用以及发展。 关键词: 神经网络控制;控制系统;人工神经网络 人工神经网络的发展过程 神经网络控制是20世纪80年代末期发展起来的自动控制领域的前沿学科之一。它是智能控制的一个新的分支,为解决复杂的非线性、不确定、不确知系统的控制问题开辟了新途径。是(人工)神经网络理论与控制理论相结合的产物,是发展中的学科。它汇集了包括数学、生物学、神经生理学、脑科学、遗传学、人工智能、计算机科学、自动控制等学科的理论、技术、方法及研究成果。 在控制领域,将具有学习能力的控制系统称为学习控制系统,属于智能控制系统。神经控制是有学习能力的,属于学习控制,是智能控制的一个分支。神经控制发展至今,虽仅有十余年的历史,已有了多种控制结构。如神经预测控制、神经逆系统控制等。 生物神经元模型 神经元是大脑处理信息的基本单元,人脑大约含1012个神经元,分成约1000种类型,每个神经元大约与102~104个其他神经元相连接,形成极为错综复杂而又灵活多变的神经网络。每个神经元虽然都十分简单,但是如此大量的神经元之间、如此复杂的连接却可以演化出丰富多彩的行为方式,同时,如此大量的神经元与外部感受器之间的多种多样的连接方式也蕴含了变化莫测的反应方式。 图1 生物神经元传递信息的过程为多输入、单输出,神经元各组成部分的功能来看,信息的处理与传递主要发生在突触附近,当神经元细胞体通过轴突传到突触前膜的脉冲幅度达到一定强度,即超过其阈值电位后,突触前膜将向突触间隙释放神经传递的化学物质,突触有两
《过程控制系统》习题解答 1-1 试简述过程控制的发展概况及各个阶段的主要特点。 答:第一个阶段50年代前后:实现了仪表化和局部自动化,其特点: 1、过程检测控制仪表采用基地式仪表和部分单元组合式仪表 2、过程控制系统结构大多数是单输入、单输出系统 3、被控参数主要是温度、压力、流量和液位四种参数 4、控制的目的是保持这些过程参数的稳定,消除或减少主要扰动对生产过程的影响 5、过程控制理论是以频率法和根轨迹法为主体的经典控制理论,主要解决单输入、单输出的定值控制系统的分析和综合问题 第二个阶段60年代来:大量采用气动和电动单元组合仪表,其特点: 1、过程控制仪表开始将各个单元划分为更小的功能,适应比较复杂的模拟和逻辑规律相结合的控制系统 2、计算机系统开始运用于过程控制 3、过程控制系统方面为了特殊的工艺要求,相继开发和应用了各种复杂的过程控制系统(串级控制、比值控制、均匀控制、前馈控制、选择性控制) 4、在过程控制理论方面,现代控制理论的得到了应用 第三个阶段70年代以来:现代过程控制的新阶段——计算机时代,其特点: 1、对全工厂或整个工艺流程的集中控制、应用计算系统进行多参数综合控制 2、自动化技术工具方面有了新发展,以微处理器为核心的智能单元组合仪表和开发和广泛应用 3、在线成分检测与数据处理的测量变送器的应用 4、集散控制系统的广泛应用 第四个阶段80年代以后:飞跃的发展,其特点: 1、现代控制理论的应用大大促进了过程控制的发展 2、过程控制的结构已称为具有高度自动化的集中、远动控制中心 3、过程控制的概念更大的发展,包括先进的管理系统、调度和优化等。 1-2 与其它自动控制相比,过程控制有哪些优点?为什么说过程控制的控制过程多属慢过程? 过程控制的特点是与其它自动控制系统相比较而言的。 一、连续生产过程的自动控制 连续控制指连续生产过程的自动控制,其被控量需定量控制,而且应是连续可调的。若控制动作在时间上是离散的(如采用控制系统等),但是其被控量需定量控制,也归入过程控制。 二、过程控制系统由过程检测、控制仪表组成 过程控制是通过各种检测仪表、控制仪表和电子计算机等自动化技术工具,对整个生产过程进行自动检测、自动监督和自动控制。一个过程控制系统是由被控过程和检测控制仪表两部分组成。 三、被控过程是多种多样的、非电量的 现代工业生产过程中,工业过程日趋复杂,工艺要求各异,产品多种多样;动态特性具有大惯性、大滞后、非线性特性。有些过程的机理(如发酵等)复杂,很难用目前过程辨识方法建立过程的精确数学模型,因此设计能适应各种过程的控制系统并非易事。 四、过程控制的控制过程多属慢过程,而且多半为参量控制 因为大惯性、大滞后等特性,决定了过程控制的控制过程多属慢过程;在一些特殊工业生产过程中,采用一些物理量和化学量来表征其生产过程状况,故需要对过程参数进行自动检测和自动控制,所以过程控制多半为参量控制。
年份 (年) 1(1988) 2(1989) 3(1990) 4(1991) 5(1992) 6(1993) 7(1994) 8(1995) 实际值 (ERI) 年份 (年) 9(1996) 10(1997) 11(1998) 12(1999) 13(2000) 14(2001) 15(2002) 16(2003) 实际值 (ERI) BP 神经网络的训练过程为: 先用1988 年到2002 年的指标历史数据作为网络的输入,用1989 年到2003 年的指标历史数据作为网络的输出,组成训练集对网络进行训练,使之误差达到满意的程度,用这样训练好的网络进行预测. 采用滚动预测方法进行预测:滚动预测方法是通过一组历史数据预测未来某一时刻的值,然后把这一预测数据再视为历史数据继续预测下去,依次循环进行,逐步预测未来一段时期的值. 用1989 年到2003 年数据作为网络的输入,2004 年的预测值作为网络的输出. 接着用1990 年到2004 年的数据作为网络的输入,2005 年的预测值作为网络的输出.依次类推,这样就得到2010 年的预测值。 目前在BP 网络的应用中,多采用三层结构. 根据人工神经网络定理可知,只要用三层的BP 网络就可实现任意函数的逼近. 所以训练结果采用三层BP模型进行模拟预测. 模型训练误差为,隐层单元数选取8个,学习速率为,动态参数,Sigmoid参数,最大迭代次数3000.运行3000次后,样本拟合误差等于。 P=[。。。];输入T=[。。。];输出 % 创建一个新的前向神经网络 net_1=newff(minmax(P),[10,1],{'tansig','purelin'},'traingdm') % 当前输入层权值和阈值 inputWeights={1,1} inputbias={1} % 当前网络层权值和阈值 layerWeights={2,1} layerbias={2} % 设置训练参数 = 50; = ; = ; = 10000; = 1e-3;
神经网络模型预测控制器 摘要:本文将神经网络控制器应用于受限非线性系统的优化模型预测控制中,控制规则用一个神经网络函数逼近器来表示,该网络是通过最小化一个与控制相关的代价函数来训练的。本文提出的方法可以用于构造任意结构的控制器,如减速优化控制器和分散控制器。 关键字:模型预测控制、神经网络、非线性控制 1.介绍 由于非线性控制问题的复杂性,通常用逼近方法来获得近似解。在本文中,提出了一种广泛应用的方法即模型预测控制(MPC),这可用于解决在线优化问题,另一种方法是函数逼近器,如人工神经网络,这可用于离线的优化控制规则。 在模型预测控制中,控制信号取决于在每个采样时刻时的想要在线最小化的代价函数,它已经广泛地应用于受限的多变量系统和非线性过程等工业控制中[3,11,22]。MPC方法一个潜在的弱点是优化问题必须能严格地按要求推算,尤其是在非线性系统中。模型预测控制已经广泛地应用于线性MPC问题中[5],但为了减小在线计算时的计算量,该部分的计算为离线。一个非常强大的函数逼近器为神经网络,它能很好地用于表示非线性模型或控制器,如文献[4,13,14]。基于模型跟踪控制的方法已经普遍地应用在神经网络控制,这种方法的一个局限性是它不适合于不稳定地逆系统,基此本文研究了基于优化控制技术的方法。 许多基于神经网络的方法已经提出了应用在优化控制问题方面,该优化控制的目标是最小化一个与控制相关的代价函数。一个方法是用一个神经网络来逼近与优化控制问题相关联的动态程式方程的解[6]。一个更直接地方法是模仿MPC方法,用通过最小化预测代价函数来训练神经网络控制器。为了达到精确的MPC技术,用神经网络来逼近模型预测控制策略,且通过离线计算[1,7.9,19]。用一个交替且更直接的方法即直接最小化代价函数训练网络控制器代替通过训练一个神经网络来逼近一个优化模型预测控制策略。这种方法目前已有许多版本,Parisini[20]和Zoppoli[24]等人研究了随机优化控制问题,其中控制器作为神经网络逼近器的输入输出的一个函数。Seong和Widrow[23]研究了一个初始状态为随机分配的优化控制问题,控制器为反馈状态,用一个神经网络来表示。在以上的研究中,应用了一个随机逼近器算法来训练网络。Al-dajani[2]和Nayeri等人[15]提出了一种相似的方法,即用最速下降法来训练神经网络控制器。 在许多应用中,设计一个控制器都涉及到一个特殊的结构。对于复杂的系统如减速控制器或分散控制系统,都需要许多输入与输出。在模型预测控制中,模型是用于预测系统未来的运动轨迹,优化控制信号是系统模型的系统的函数。因此,模型预测控制不能用于定结构控制问题。不同的是,基于神经网络函数逼近器的控制器可以应用于优化定结构控制问题。 在本文中,主要研究的是应用于非线性优化控制问题的结构受限的MPC类型[20,2,24,23,15]。控制规则用神经网络逼近器表示,最小化一个与控制相关的代价函数来离线训练神经网络。通过将神经网络控制的输入适当特殊化来完成优化低阶控制器的设计,分散和其它定结构神经网络控制器是通过对网络结构加入合适的限制构成的。通过一个数据例子来评价神经网络控制器的性能并与优化模型预测控制器进行比较。 2.问题表述 考虑一个离散非线性控制系统: 其中为控制器的输出,为输入,为状态矢量。控制
模块化神经网络结构自组织设计方法 从仿生学角度出发,根据脑功能分区原理和脑式信息处理理论,对模块化神经网络结构自组织设计中的子网络结构自组织问题、复杂任务动态分解问题和子网络动态重组问题展开了系统而深入的研究,内容包括:1.提出了一种基于改进拟熵的权衰减算法,该算法对Shannon熵进行改进,改进后的熵与Shannon熵对不确定性的描述具有相同的效果,但克服了Shannon熵固有的缺点。将神经网络实际输出与期望输出的交叉熵和隐节点输出拟熵作为代价函数,并采用熵周期的策略对网络参数进行寻优。最后,通过删除冗余的权连接,实现了简化神经网络结构的目的。2.针对传统修剪算法必须将网络训练到代价函数局部极小的问题,提出了一种基于神经网络复杂度的修剪算法。 该算法利用网络连接权矩阵的协方差矩阵计算网络的信息熵,获得网络的复杂度,在保证网络信息处理能力的前提下,删除对网络复杂度影响最小的隐节点。由于该算法只与神经网络的内部连接特性有关,而与外部输入无关,因此该算法不要求训练网络到代价函数的极小点,适合在线修剪网络结构。3.针对权衰减和修剪算法采取贪婪搜索策略易陷入局部最优网络结构的问题,提出了一种自适应前馈神经网络结构设计算法。该算法根据前馈网络输出节点的输出是隐节点输出的线性组合的事实,结合前馈网络的学习动态,采取自适应寻优策略合并和分裂隐节点。 当神经网络中有冗余隐节点时,利用互信息找到输出线性相关的隐节点进行合并,以简化神经网络结构;当神经网络学习能力不足时,采用随机分裂隐节点的方法,以增大神经网络的学习能力。实验表明,该算法能够达到设计最优神经网络结构的目的。4.针对单一神经网络训练时间长、对复杂问题处理精度较低、易陷入局部极小等缺陷,提出了一种多层协同模块化神经网络结构。该神经网络具有层级结构,基于条件模糊聚类技术对样本进行分类,根据分类结果实现对神经网络的模块划分,采用代数算法对网络权值进行求解,基于距离测度设计了处理输入信息的子网络选择方法。 为提高神经网络对复杂问题的逼近能力,选择数目不等的多个子网络参与给定输入的协同学习,采取“分而治之”与“集成学习”相结合方法以提高网络的性能。实验表明,对于复杂问题,多层协调模块化神经网络可以有效地提高网络
几种神经网络模型及其应用 摘要:本文介绍了径向基网络,支撑矢量机,小波神经网络,反馈神经网络这几种神经网络结构的基本概念与特点,并对它们在科研方面的具体应用做了一些介绍。 关键词:神经网络径向基网络支撑矢量机小波神经网络反馈神经网络Several neural network models and their application Abstract: This paper introduced the RBF networks, support vector machines, wavelet neural networks, feedback neural networks with their concepts and features, as well as their applications in scientific research field. Key words: neural networks RBF networks support vector machines wavelet neural networks feedback neural networks 2 引言 随着对神经网络理论的不断深入研究,其应用目前已经渗透到各个领域。并在智能控制,模式识别,计算机视觉,自适应滤波和信号处理,非线性优化,语音识别,传感技术与机器人,生物医学工程等方面取得了令人吃惊的成绩。本文介绍几种典型的神经网络,径向基神经网络,支撑矢量机,小波神经网络和反馈神经网络的概念及它们在科研中的一些具体应用。 1. 径向基网络 1.1 径向基网络的概念 径向基的理论最早由Hardy,Harder和Desmarais 等人提出。径向基函数(Radial Basis Function,RBF)神经网络,它的输出与连接权之间呈线性关系,因此可采用保证全局收敛的线性优化算法。径向基神经网络(RBFNN)是 3 层单元的神经网络,它是一种静态的神经网络,与函数逼近理论相吻合并且具有唯一的最佳逼近点。由于其结构简单且神经元的敏感区较小,因此可以广泛地应用于非线性函数的局部逼近中。主要影响其网络性能的参数有3 个:输出层权值向量,隐层神经元的中心以及隐层神经元的宽度(方差)。一般径向基网络的学习总是从网络的权值入手,然后逐步调整网络的其它参数,由于权值与神经元中心及宽度有着直接关系,一旦权值确定,其它两个参数的调整就相对困难。 其一般结构如下: 如图 1 所示,该网络由三层构成,各层含义如下: 第一层:输入层:输入层神经元只起连接作用。 第二层:隐含层:隐含层神经元的变换函数为高斯核. 第三层:输出层:它对输入模式的作用做出响应. 图 1. 径向基神经网络拓扑结构 其数学模型通常如下: 设网络的输入为x = ( x1 , x2 , ?, xH ) T,输入层神经元至隐含层第j 个神经元的中心矢 为vj = ( v1 j , v2 j , ?, vIj ) T (1 ≤j ≤H),隐含层第j 个神经元对应输入x的状态为:zj = φ= ‖x - vj ‖= exp Σx1 - vij ) 2 / (2σ2j ) ,其中σ(1≤j ≤H)为隐含层第j个神
神经网络最新发展综述 学校:上海海事大学 专业:物流工程 姓名:周巧珍 学号:201530210155
神经网络最新发展综述 摘要:作为联接主义智能实现的典范,神经网络采用广泛互联的结构与有效的学习机制来模拟人脑信息处理的过程,是人工智能发展中的重要方法,也是当前类脑智能研究中的有效工具。目前,模拟人脑复杂的层次化认知特点的深度学习成为类脑智能中的一个重要研究方向。通过增加网络层数所构造的“深层神经网络”使机器能够获得“抽象概念”能力,在诸多领域都取得了巨大的成功,又掀起了神经网络研究的一个新高潮。本文分8个方面综述了其当前研究进展以及存在的问题,展望了未来神经网络的发展方向。 关键词: 类脑智能;神经网络;深度学习;大数据 Abstract: As a typical realization of connectionism intelligence, neural network, which tries to mimic the information processing patterns in the human brain by adopting broadly interconnected structures and effective learning mechanisms, is an important branch of artificial intelligence and also a useful tool in the research on brain-like intelligence at present. Currently, as a way to imitate the complex hierarchical cognition characteristic of human brain, deep learning brings an important trend for brain-like intelligence. With the increasing number of layers, deep neural network entitles machines the capability to capture “abstract concepts” and it has achieved great success in various fields, leading a new and advanced trend in neural network research. This paper summarizes the latest progress in eight applications and existing problems considering neural network and points out its possible future directions. Key words : artificial intelligence; neural network; deep learning; big data 1 引言 实现人工智能是人类长期以来一直追求的梦想。虽然计算机技术在过去几十年里取得了长足的发展,但是实现真正意义上的机器智能至今仍然困难重重。伴随着神经解剖学的发展,观测大脑微观结构的技术手段日益丰富,人类对大脑组织的形态、结构与活动的认识越来越深入,人脑信息处理的奥秘也正在被逐步揭示。如何借助神经科学、脑科学与认知科学的研究成果,研究大脑信息表征、转换机理和学习规则,建立模拟大脑信息处理过程的智能计算模型,最终使机器掌握人类的认知规律,是“类脑智能”的研究目标。 类脑智能是涉及计算科学、认知科学、神经科学与脑科学的交叉前沿方向。类脑智能的
神经网络系统建模综述 一、人工神经网络简介 1.1人工神经网络的发展历史 人工神经网络早期的研究工作应追溯至本世纪40年代。下面以时间顺序,以著名的人物或某一方面突出的研究成果为线索,简要介绍人工神经网络的发展历史。 1943年,心理学家W·Mcculloch和数理逻辑学家W·Pitts在分析、总结神经元基本特性的基础上首先提出神经元的数学模型。此模型沿用至今,并且直接影响着这一领域研究的进展。因而,他们两人可称为人工神经网络研究的先驱。 1945年冯·诺依曼领导的设计小组试制成功存储程序式电子计算机,标志着电子计算机时代的开始。 50年代末,F·Rosenblatt设计制作了“感知机”,它是一种多层的神经网络。这项工作首次把人工神经网络的研究从理论探讨付诸工程实践。 在60年代初期,Widrow提出了自适应线性元件网络,这是一种连续取值的线性加权求和阈值网络。后来,在此基础上发展了非线性多层自适应网络。当时,这些工作虽未标出神经网络的名称,而实际上就是一种人工神经网络模型。 80年代初期,模拟与数字混合的超大规模集成电路制作技术提高到新的水平,完全付诸实用化,此外,数字计算机的发展在若干应用领域遇到困难。这一背景预示,向人工神经网络寻求出路的时机已经成熟。美国的物理学家Hopfield于1982年和1984年在美国科学院院刊上发表了两篇关于人工神经网络研究的论文,引起了巨大的反响。人们重新认识到神经网络的威力以及付诸应用的现实性。随即,一大批学者和研究人员围绕着Hopfield提出的方法展开了进一步的工作,形成了80年代中期以来人工神经网络的研究热潮。 1.2人工神经网络的工作原理 人工神经网络是由大量处理单元广泛互连而成的网络结构,是人脑的抽象、简化和模拟。人工神经网络就是模拟人思维的第二种方式。这是一个非线性动力学系统,其特色在于信息的分布式存储和并行协同处理。虽然单个神经元的结构极其简单,功能有限,但大量神经元构成的网络系统所能实现的行为却是极其丰富多彩的。 人工神经网络首先要以一定的学习准则进行学习,然后才能工作。所以网络学习的准则应该是:如果网络作出错误的的判决,则通过网络的学习,应使得网络减少下次犯同样错误的可能性。
神经网络控制 HEN system office room 【HEN16H-HENS2AHENS8Q8-HENH1688】
人工神经网络控制 摘要: 神经网络控制,即基于神经网络控制或简称神经控制,是指在控制系统中采用神经网络这一工具对难以精确描述的复杂的非线性对象进行建模,或充当控制器,或优化计算,或进行推理,或故障诊断等,亦即同时兼有上述某些功能的适应组合,将这样的系统统称为神经网络的控制系统。本文从人工神经网络,以及控制理论如何与神经网络相结合,详细的论述了神经网络控制的应用以及发展。 关键词: 神经网络控制;控制系统;人工神经网络 人工神经网络的发展过程 神经网络控制是20世纪80年代末期发展起来的自动控制领域的前沿学科之一。它是智能控制的一个新的分支,为解决复杂的非线性、不确定、不确知系统的控制问题开辟了新途径。是(人工)神经网络理论与控制理论相结合的产物,是发展中的学科。它汇集了包括数学、生物学、神经生理学、脑科学、遗传学、人工智能、计算机科学、自动控制等学科的理论、技术、方法及研究成果。 在控制领域,将具有学习能力的控制系统称为学习控制系统,属于智能控制系统。神经控制是有学习能力的,属于学习控制,是智能控制的一个分支。神经控制发展至今,虽仅有十余年的历史,已有了多种控制结构。如神经预测控制、神经逆系统控制等。 生物神经元模型 神经元是大脑处理信息的基本单元,人脑大约含1012个神经元,分成约1000种类型,每个神经元大约与 102~104个其他神经元相连接,形成极为错综复杂而又灵活多变的神经网络。每个神经元虽然都十分简单,但是如此大量的神经元之间、如此复杂的连接却可以演化出丰富多彩的行为方式,同时,如此大量的神经元与外部感受器之间的多种多样的连接方式也蕴含了变化莫测的反应方式。 图1 生物神经元传递信息的过程为多输入、单输出,神经元各组成部分的功能来看,信息的处理与传递主要发生在突触附近,当神经元细胞体通过轴突传到突触前膜的脉
BP神经网络模型预测未来 BP神经网络算法概述: 简介与原理 BP神经网络是一种多层前馈神经网络,该网络的主要特点是:信号前向传递,误差反向传播。在前向传递中,输入信号从输入层经隐含层逐层处理,直至输出层,每一层的神经元状态只影响下一层神经元状态。如果输出层得不到期望输出,则转入反向传播,根据预测误差调整网络权值和阈值,从而使BP神经网络预测输出不断逼近期望输出。 BP神经网络的拓扑结构如下图所示: 输入层隐含层输出层 BP神经网络结构图 图中是BP神经网络的输入值,是BP神经网络的预测值, 为BP神经网络权值。 BP神经网络预测前首先要训练网络,通过训练使网络具有联想记忆和预测能力。BP神经网络的训练过程包括一下几个步骤。 步骤一:网络初始化。根据系统输入输出序列(,) X Y确定网络输入层节点数,n隐含层节点数l、输出层节点数m、初始化输入层、隐含层和输出层神经元之间的连接权值,, ωω初始化隐含层阈值a,给 ij jk
定输出层阈值b,给定学习速率和神经元激励函数。 步骤二:隐含层输出计算。根据输入向量,输入层和隐含层间连接权值,以及隐含层阈值,计算隐含层输出。 步骤三:输出层输出计算。根据隐含层输出,连接权值和阈值,计算BP神经网络预测输出。 步骤四:误差计算根据网络输出和预期输出,计算网络预测误差。 步骤五:权值更新。根据网络预测更新网络连接权值 步骤六:阈值更新。根据网络预测误差更新网络节点阈值。 步骤七:判断算法迭代是否结束,若没有结束,返回步骤二。 下面是基本BP算法的流程图。 BP神经网络的拓扑结构如下图所示: 输入层隐含层输出层 BP神经网络预测的算法流程如下: 步骤一:对初始数据进行标准化。 步骤二:利用原始数据对网络进行训练。 步骤三:对未来第t年第i类污染程度的河流长度比例进行预测。 步骤四:利用第年预测得到的数据作为样本再对网络进行训练。 步骤五:然后令1 t t t=。 =+,回到Step2,直到10 2.建模步骤: Step 1 建立如下网络拓扑结构 表3 网络结构
第二章自动控制系统的数学模型 教学目的: (1)建立动态模拟的概念,能编写系统的微分方程。 (2)掌握传递函数的概念及求法。 (3)通过本课学习掌握电路或系统动态结构图的求法,并能应用各环节的传递函数,求系统的动态结构图。 (4)通过本课学习掌握电路或自动控制系统动态结构图的求法,并对系统结构图进行变换。 (5)掌握信号流图的概念,会用梅逊公式求系统闭环传递函数。 (6)通过本次课学习,使学生加深对以前所学的知识的理解,培养学生分析问题的能力 教学要求: (1)正确理解数学模型的特点; (2)了解动态微分方程建立的一般步骤和方法; (3)牢固掌握传递函数的定义和性质,掌握典型环节及传递函数; (4)掌握系统结构图的建立、等效变换及其系统开环、闭环传递函数的求取,并对重要的传递函数如:控制输入下的闭环传递函数、扰动输入 下的闭环传递函数、误差传递函数,能够熟练的掌握; (5)掌握运用梅逊公式求闭环传递函数的方法; (6)掌握结构图和信号流图的定义和组成方法,熟练掌握等效变换代数法则,简化图形结构,掌握从其它不同形式的数学模型求取系统传递函 数的方法。 教学重点: 有源网络和无源网络微分方程的编写;有源网络和无源网络求传递函数;传递函数的概念及求法;由各环节的传递函数,求系统的动态结构图;由各环节的传递函数对系统的动态结构图进行变换;梅逊增益公式的应用。 教学难点:举典型例题说明微分方程建立的方法;求高阶系统响应;求复杂系统的动态结构图;对复杂系统的动态结构图进行变换;求第K条前向通道特记式 的余子式 。 k 教学方法:讲授 本章学时:10学时 主要内容: 2.0 引言 2.1 动态微分方程的建立 2.2 线性系统的传递函数 2.3 典型环节及其传递函数 2.4系统的结构图 2.5 信号流图及梅逊公式
1.神经网络 神经网络是单个并行处理元素的集合,我们从生物学神经系统得到启发。在自然界,网络功能主要由神经节决定,我们可以通过改变连接点的权重来训练神经网络完成特定的功能。 一般的神经网络都是可调节的,或者说可训练的,这样一个特定的输入便可得到要求的输出。如下图所示。这里,网络根据输出和目标的比较而调整,直到网络输出和目标匹配。作为典型,许多输入/目标对应的方法已被用在有监督模式中来训练神经网络。 神经网络已经在各个领域中应用,以实现各种复杂的功能。这些领域包括:模式识别、鉴定、分类、语音、翻译和控制系统。 如今神经网络能够用来解决常规计算机和人难以解决的问题。我们主要通过这个工具箱来建立示范的神经网络系统,并应用到工程、金融和其他实际项目中去。 一般普遍使用有监督训练方法,但是也能够通过无监督的训练方法或者直接设计得到其他的神经网络。无监督网络可以被应用在数据组的辨别上。一些线形网络和Hopfield网络是直接设计的。总的来说,有各种各样的设计和学习方法来增强用户的选择。 神经网络领域已经有50年的历史了,但是实际的应用却是在最近15年里,如今神经网络仍快速发展着。因此,它显然不同与控制系统和最优化系统领域,它们的术语、数学理论和设计过程都已牢固的建立和应用了好多年。我们没有把神经网络工具箱仅看作一个能正常运行的建好的处理轮廓。我们宁愿希望它能成为一个有用的工业、教育和研究工具,一个能够帮助用户找到什么能够做什么不能做的工具,一个能够帮助发展和拓宽神经网络领域的工具。因为这个领域和它的材料是如此新,这个工具箱将给我们解释处理过程,讲述怎样运用它们,并且举例说明它们的成功和失败。我们相信要成功和满意的使用这个工具箱,对范例和它们的应用的理解是很重要的,并且如果没有这些说明那么用户的埋怨和质询就会把我们淹没。所以如果我们包括了大量的说明性材料,请保持耐心。我们希望这些材料能对你有帮助。 这个章节在开始使用神经网络工具箱时包括了一些注释,它也描述了新的图形用户接口和新的运算法则和体系结构,并且它解释了工具箱为了使用模块化网络对象描述而增强的机动性。最后这一章给出了一个神经网络实际应用的列表并增加了一个新的文本--神经网络设计。这本书介绍了神经网络的理论和它们的设计和应用,并给出了相当可观的MA TLAB和神经网络工具箱的使用。 2. 反向传播网络(BP网络) 1.概述 前面介绍了神经网络的结构和模型,在实际应用中,我们用的最广泛的是反向传播网络(BP网络)。下面就介绍一下BP网络的结构和应用。 BP网络是采用Widrow-Hoff学习算法和非线性可微转移函数的多层网络。一个典型的BP网络采用的是梯度下降算法,也就是Widrow-Hoff算法所规定的。backpropagation就是指的为非线性多层网络计算梯度的方法。现在有许多基本的优化算法,例如变尺度算法和牛顿算法。神经网络工具箱提供了许多这样的算法。这一章我们将讨论使用这些规则和这些算法的优缺点。
系统工程理论与实践 Systems Engineering——Theory & Practice 1999年 第2期 第19卷 vol.19 No.2 1999 遗传算法与神经网络的结合 李敏强 徐博艺 寇纪淞 摘要 阐明了遗传算法和神经网络结合的必要性和可行性,提出用多层前馈神经网络作为遗传搜索的问题表示方式的思想。用遗传算法和神经网络结合的方法求解了短期地震预报问题,设计了用遗传算法训练神经网络权重的新方法,实验结果显示了遗传算法快速学习网络权重的能力,并且能够摆脱局部极点的困扰。 关键词 遗传算法 进化计算 神经网络 On the Combination of Genetic Algorithms and Neural Networks Li Minqiang Xu Boyi Kou Jisong (Institute of Systems Engineering, Tianjin University, Tianjin 300072) Abstract In this paper, we demonstrate the necessity and possibility of combining neural network (NN) with GAs. The notion of using multilayered feed forward NN as the representation method of genetic and the searching technique is introduced. We combine GA and NN for solving short term earthquake forecasting problem, design a novel method of using GAs to train connection weights of NN.The empirical test indicates the capability of the new method in fast learning of NN and escaping local optima. Keywords genetic algorithms; evolutionary computation; neural networks 1 引言 智能可以分为三个层次:高层次的是生物智能(BI),其次是人工智能(AI), 处于低层次的是计算智能(CI)。 计算智能是国际上新近提出的学科概念,在计算智能中,计算的概念是传统计算概念的拓展,计算对象不仅局限于数和字符,运算符号也不再局限于加减乘除等运算,在这个范畴内的加减乘除也需赋于新的含义。但一般来说,AI 偏重于逻辑推理,而CI则偏重于数值计算。 目前,计算智能正处于迅猛发展的阶段,其主要技术包括模糊技术、神经网络、进化计算等[5]。这几项技术各自均有了数十年的历史,但当时这些方法并未受到足够的重视,一是当时这些方法还不很成熟,二是受当时计算机软硬件的限制,而这些方法一般需要较大的计算量,难以取得实际应用。随着计算机技术的发展和普及,它们在最近十年得到了突飞猛进的发展,引起了诸多领域专家学者的关注,成为一个跨
DOI:10.7495/j.issn.1009‐3486.2016.04.010 基于模块化的动态贝叶斯网络的 安全态势评估模型 收稿日期:2015‐07‐07;修回日期:2015‐09‐30。 基金项目:国家自然科学基金资助项目(61100042);湖北省自然科学基金资助项目(2015CFC867)。 作者简介:孟 佳(1990-),男,硕士生,主要研究方向为军事信息安全、系统建模与评估。 通信作者:孟 佳,mengjiazifan@sina.cn。孟 佳1,吴晓平1,陈 燕2,付 钰1 (1.海军工程大学信息安全系,武汉430033;2.61062部队,北京100091) 摘 要:针对由网络信息系统结构变动引起的安全态势评估时效性差的问题,结合层次网络和模块网络的优点,建立了基于模块化动态贝叶斯网络的态势评估模型。首先,通过判断节点间是否存在有向连接,建立子系统的动态贝叶斯网络模块单元;然后,由若干模块单元和独立节点构建整体的动态贝叶斯网络,并利用约束递归算法学习网络概率参数;最后,通过仿真测试验证该模型的正确性。 关键词:安全态势评估模型;动态贝叶斯网络;模块化网络;网络信息系统 中图分类号:TP393 文献标志码:A 文章编号:1009-3486(2016)04-0048-06 ResearchonsecuritysituationevaluationmodelbasedonmodulardynamicBayesiannetwork MENGJia1,WUXiao‐ping1,CHENYan2,FUYu 1 (1.Dept.ofInformationSecurity,NavalUniv.ofEngineering,Wuhan430033,China; 2.UnitNo.61062,Beijing100091,China)Abstract:Tosolvethesecuritysituationevaluationproblemofpoortimelinesscausedbyreconstruc‐tionofthenetworkinformationsystem,asituationassessmentmodelbasedonmodulardynamicBayesiannetworksisestablishedbycombininghierarchicalnetworkwithmodularnetwork.Firstly,aconditionalindependencetestisusedtodeterminewhetherthereisaconnectionbetweennodesanddynamicBayesiannetworkmodulesappliedforsubsystemsareconstructed.Then,anoveralldynamicBayesiannetworkwithseveralmodulesandindependentnodesisbuilt.Thenetworkprobabilitypa‐rametersareobtainedbyutilizingtheconstrainedrecursivealgorithm.Finally,simulationtestsvali‐datethemodel′scorrectness.Keywords:securitysituationevaluationmodel;dynamicBayesiannetwork;modularnetwork;net‐workinformationsystem 目前,网络信息系统安全态势评估方法主要有神经网络、D‐S证据理论和模糊逻辑等[1-4]。这些方法能够有效地将先验信息和后验数据统一起来,不需要精确了解概率分布,但需要大量的训练样本通过机器学习获得先验知识,空间开销和推理代价高,在实时环境中可能无法满足要 求[3-4]。而贝叶斯网络用拓扑结构表示客观随机 事件的因果关系,相对以上算法其运算量少,收敛 性和实时性较好。基于贝叶斯网络的态势评估主 要分为静态贝叶斯网络和动态贝叶斯网络两类, 其中前者基于单个时刻的数据推理得到系统态 势,但只能处理单一时刻的数据,不能有效描述整 第28卷 第4期 2016年8月 海军工程大学学报 JOURNALOFNAVALUNIVERSITYOFENGINEERING Vol.28 No.4 Aug.2016
第二章控制系统的数学模型 2-1 什么是系统的数学模型?大致可以分为哪些类型? 答定量地表达系统各变量之间关系的表达式,称工矿企业数学模型。从不同的角度,可以对 数学模型进行大致的分类,例如:用来描述各变量间动态关系的数学模型为动态模型,用来描述各变量间稳态关系有数学模型为静态模型;数学模型中各变量与几何位置无关的称为集中参数模型,反之与几 何位置有关的称为分布参数模型;变量间关系表现为线性的称为线性模型,反之非线性模型;模型参数与时间有关的称为时变模型,与时间无关的称为时不变或定常模型;以系统的输入、输出变量这种外部特征来描述系统特性的数学模型称为输入输出模型,而以系统内部状态变量描述的数学模型称为状态空 间模型;等等。 2-2 系统数学模型的获取有哪几种方法? 答获取系统数学模型的方法主要有机理分析法和实验测试法。 机理分析法是通过对系统内部机理的分析,根据一些基本的物理或化学变化的规律而导出支配系统运动规律的数学模型,这样得到的模型称为机理模型。 实验测试法是通过对实际系统的实验测试,然后根据测试数据,经过一定的数据处理而获得系统的数学 模型,这样得到的模型可称为实测模型或经验模型。 如果将上述两种方法结合起来,即通过机理分析的方法预先得到数学模型的结构或函数形式,然后对其 中的某些参数用实验辨识的方法来确定,这样得到的数学模型可称为混合模型。这是介于 上述两种方法之间的一种比较切合实际的应用较为普遍的方法。 2-3 通过机理分析法建立对象微分方程数学模型的主要步骤有哪些? 答主要步骤有: ⑴根据系统的控制方案和对象的特性,确定对象的输入变量和输出变量。一般来说,对象的输出变量为系统的被控变量,输入变量为作用于对象的操纵变量或干扰变量。 ⑵根据对象的工艺机理,进行合理的假设和简化,突出主要因素,忽略次要 因素。⑶根据对象的工艺机理,从基本的物理、化学等定律出了,列写描述 对象运动规律的原始微分 方程式(或方程式组)。 ⑷消去中间变量,推导出描述对象输入变量与输出变量之间关系的方程式。 ⑸根据要求,对上述方程式进行增量化、线性化和无因次化的处理,最后得 出无因次的、能够 描述对象输入变量与输出变量的增量之间关系的线性微分方程式(对于严重非线性的对象,可进行分段 线性化处理或直接导出非线性微分方程式)。 2-4 试述传递函数的定义。如何由描述对象动态特性的微分方程式得到相应的传递函数?并写出传递函数的一般形式。 答对于线性定常系统、对象或环节的传递函数的定义可以表述为:当初始条 件为零时,系统、对象或环节输出变量的拉氏变换式与输入变量的拉氏变换式之比。 如果已知系统、对象或环节的动态数学模型用下述线性常系数微分方程式来描述: 式中y为输出变量,x为输入变量,表示y(t) 的n阶导数,表示x(t)
神经网络技术的军事应用前景 杯诌j71 7神经网络技术的军事应用前景 一 ,丽茜 冯泉英 (709所)E 神经网络技术的研究已在国内外广泛必起.由于它在信号,信号处理机制,模式识别等方面 有些独到的特点,因而受到各国的普遍重视.从l987年6月第一届神经网络国际会议后,每年 都要召开国际性神经网络的专业会议及专题讨论金,促进神经网络的研制,开发和应用.美 国,西欧,日奉等发达国家非常重视神经网络的研究:美国的战咯防御计划)等高级计划为 神经网络的研究提供军用专款;欧州经济共同体赍助两项神经网络研究计划:Annie和pym~alion 井开发了ⅡarBpu佃’神经网络计算机;日本则更抢先一步.据称已在开发第二代神经网络计
算机,并在工业管理,优化组合,军事指挥等领域得到广泛应用, , 神经网络系统的研究,包括新神经网模型(如混淹神经模型,复数神经模型和神经逻辑 模型等);神经网络系统的硬件研究.包括神经网加速器,vLSI神经苍片和神经同的工程实 现(即用逻辑电路实现).神经网络软件研究,包括通用神经网仿真系统,神经同语言和神 经网络操作系统. 二,神经网络计算机 神经网络计算机是模拟人瞄信息处理功锟.通过并行分布处理和自组錾{方式由大量基本 处理单元相互连接而成的系统.它具有思考,记忆和同题求解的能力,每一个处理单元不仅 足一个信息处理的场所.而且也是一个活跃的信息存储场所.它还是一个能与类似的处理单 元或邻近的处理单元进行相互作用的联系场所.其能力分布在各个处理单元上,构成了一个 信息存储,处理和联系的三结合体一信息处理机. 1.神经计算帆的实现技术 神经计算机的实现方法可分为软件实现,虚拟实现,硬件实现,光器件实现四种.