一、Android开机启动流程简介
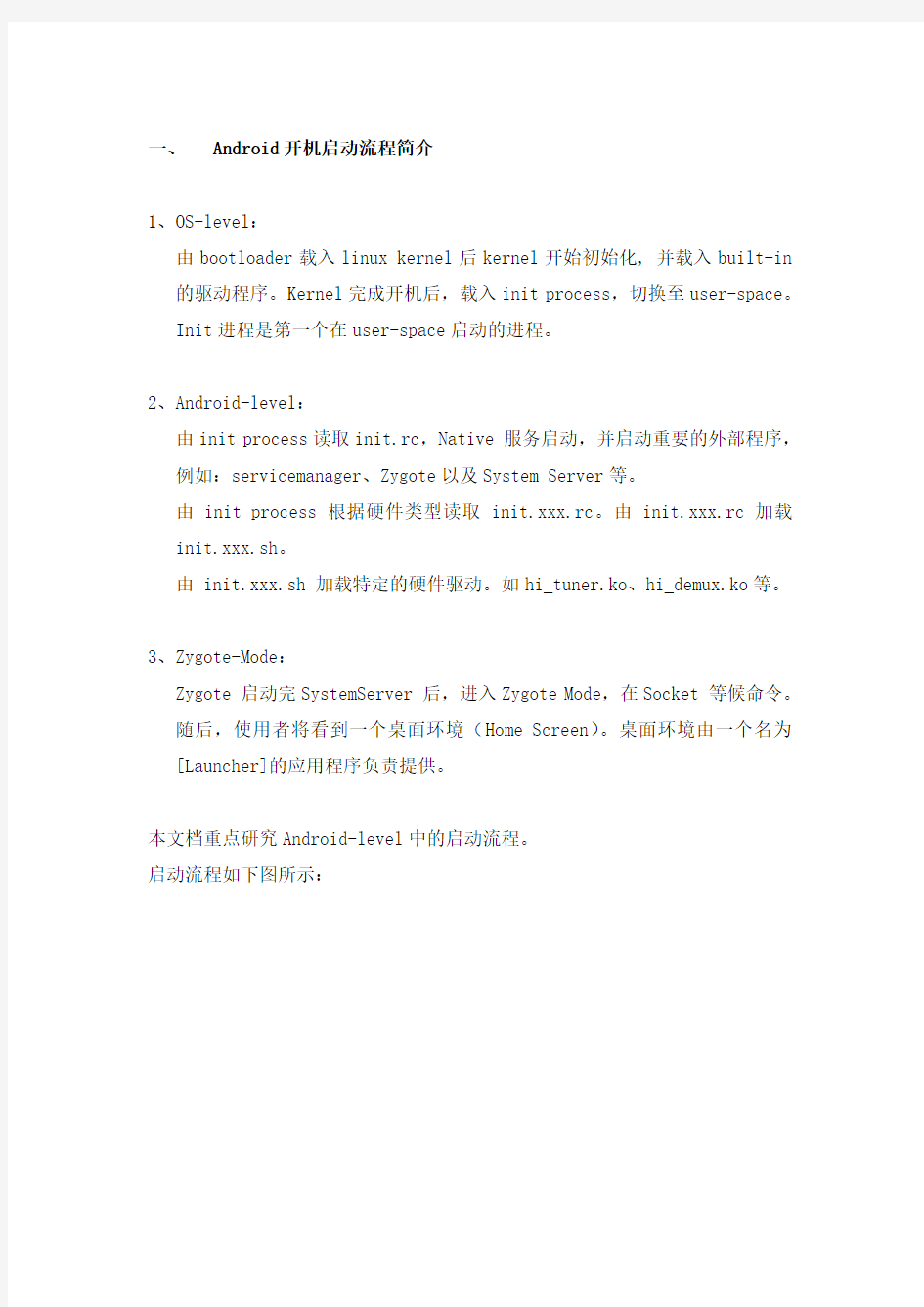
1、OS-level:
由bootloader载入linux kernel后kernel开始初始化, 并载入built-in 的驱动程序。Kernel完成开机后,载入init process,切换至user-space。
Init进程是第一个在user-space启动的进程。
2、Android-level:
由init process读取init.rc,Native 服务启动,并启动重要的外部程序,例如:servicemanager、Zygote以及System Server等。
由 init process 根据硬件类型读取init.xxx.rc。由init.xxx.rc加载init.xxx.sh。
由 init.xxx.sh 加载特定的硬件驱动。如hi_tuner.ko、hi_demux.ko等。
3、Zygote-Mode:
Zygote 启动完SystemServer 后,进入Zygote Mode,在Socket 等候命令。
随后,使用者将看到一个桌面环境(Home Screen)。桌面环境由一个名为[Launcher]的应用程序负责提供。
本文档重点研究Android-level中的启动流程。
启动流程如下图所示:
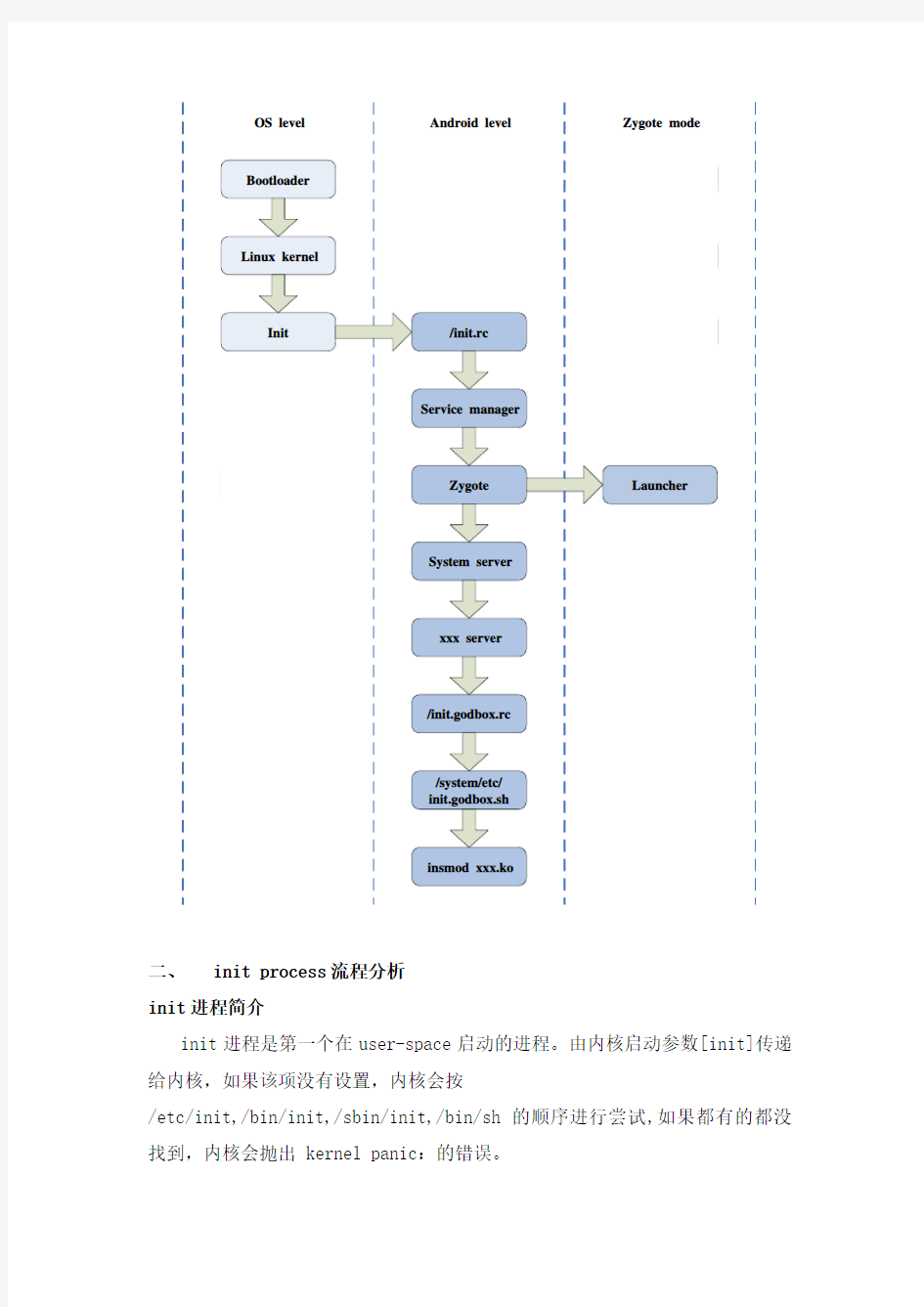
二、init process流程分析
init进程简介
init进程是第一个在user-space启动的进程。由内核启动参数[init]传递给内核,如果该项没有设置,内核会按
/etc/init,/bin/init,/sbin/init,/bin/sh的顺序进行尝试,如果都有的都没找到,内核会抛出 kernel panic:的错误。
init进程包含在跟文件系统中,跟文件系统被直接编译到了内核。对init 进程的修改,需要重新编译烧写内核。编译命令:
#cd kernel
#make uImag
CONFIG_INITRAMFS_SOURCE=../out/target/product/Hi3716C/root/ -j 8
#cp kernel/arch/arm/boot/uImage out/target/product/Hi3716C/kernel -afv 源代码路径:
froyo\system\core\init
编译的文件:
builtins.c
init.c
devices.c
property_service.c
util.c
parser.c
logo.c
编译命令:
make init
生成的文件:
/out/target/product/Hi3716C/root/init
init进程启动流程
1.安装SIGCHLD信号。
sigaction(SIGCHLD, &act, 0);
如果父进程不等待子进程结束,子进程将成为僵尸进程(zombie)从而占用系统资源。因此需要对SIGCHLD信号做出处理,回收僵尸进程的资源,避免造成不必要的资源浪费。
2.对umask进行清零。
umask(0);
umask是什么?
登录系统之后创建一个文件总是有一个默认权限的,那么这个权限是怎么来的呢?这就是umask干的事情。umask设置了用户创建文件的默认权限,它与chmod的效果刚好相反,umask设置的是权限“补码”,而chmod设置的是文件权限码。设置文件的默认权限,umask和chmod的权限刚好反的,umask的0000相当于chmod的0777。
3.为rootfs建立必要的文件夹,并挂载适当的分区。
mkdir("/dev", 0755);
mkdir("/proc", 0755);
mkdir("/sys", 0755);
mount("tmpfs", "/dev", "tmpfs", 0, "mode=0755");
mkdir("/dev/pts", 0755);
mkdir("/dev/socket", 0755);
mount("devpts", "/dev/pts", "devpts", 0, NULL);
mount("proc", "/proc", "proc", 0, NULL);
mount("sysfs", "/sys", "sysfs", 0, NULL);
4.创建/dev/null和/dev/kmsg节点。
创建/dev/null结点,重定向标准输入,输出以及标准出错。
open_devnull_stdio();
创建/dev/kmsg设备结点,我们可以利用这个设备输出调试信息
log_init();
5.解析/init.rc,将所有服务和操作信息加入链表。
解析初始化脚本,这里只是parse,将脚本解析到一个链表中,并没有执行。
parse_config_file("/init.rc");
6.从/proc/cmdline中提取信息内核启动参数,并保存到全局变量。
qemu_init();
import_kernel_cmdline(0);
7.根据6获得的hardware参数信息,解析额外的硬件相关init脚本.
hi3726c 中为 init.godbox.rc
get_hardware_name();
snprintf(tmp, sizeof(tmp), "/init.%s.rc", hardware);
parse_config_file(tmp);
8.找到init.rc paser链表中为early-init属性的项目,将其添加到action
queue中,并执行执行这些queue中的动作。
action_for_each_trigger("early-init", action_add_queue_tail);
drain_action_queue();
9.遍历/sys文件夹,是内核产生设备添加事件(为了自动产生设备节点)。
device_fd = device_init();
10.初始化属性系统,并导入初始化属性文件。
property_init();
每个属性都有一个名称和值,它们都是字符串格式。属性被大量使用在Android系统中,用来记录系统设置或进程之间的信息交换。属性是在整个系统中全局可见的。每个进程可以get/set属性。在系统初始化时,Android 将分配一个共享内存区来存储的属性,这里主要是从/default.prop属性文件读取属性。类似于像Windows下的注册表的作用。
/default.pro的内容
ro.secure=0
ro.allow.mock.location=1
ro.debuggable=1
persist.service.adb.enable=1
11.从属性系统中得到ro.debuggable,若为1,則初始化keychord监听。
keychord_fd = open_keychord();
12.判断是否有控制台,如果没有,就尝试是否是可以打缺省的控制台。
缺省控制台名称:static char *console_name = "/dev/console";
if (console[0]) {
snprintf(tmp, sizeof(tmp), "/dev/%s", console);
console_name = strdup(tmp);
}
fd = open(console_name, O_RDWR);
if (fd >= 0)
have_console = 1;
close(fd);
13.读取/initlogo.rle,如果成功則在/dev/graphics/fb0显示Logo,如果失败
则将/dev/tty0设为文本模式,并打开/dev/tty0,输出文本“ANDROID”。
if( load_565rle_image(INIT_IMAGE_FILE) ) {
fd = open("/dev/tty0", O_WRONLY);
if (fd >= 0) {
const char *msg;
msg = "\n"
"\n"
"\n"
"\n"
"\n"
"\n"
"\n" /*console is 40 cols x 30 lines*/
"\n"
"\n"
"\n"
"\n"
"\n"
"\n"
"\n"
" A N D R O I D ";
write(fd, msg, strlen(msg));
close(fd);
}
}
14.判断是否使用模拟器运行,如果时,就加载内核命令行参数。
if (qemu[0])
import_kernel_cmdline(1);
15.根据内核命令行参数来设置工厂模式测试。
if (!strcmp(bootmode,"factory"))
property_set("ro.factorytest", "1");
else if (!strcmp(bootmode,"factory2"))
property_set("ro.factorytest", "2");
else
property_set("ro.factorytest", "0");
16.设置序列号属性值。
property_set("ro.serialno", serialno[0] ? serialno : "");
17.设置启动模式属性值。
property_set("ro.bootmode", bootmode[0] ? bootmode : "unknown");
18.设置基带频率属性值。
property_set("ro.baseband", baseband[0] ? baseband : "unknown");
19.设置硬件载波方式属性值。
property_set("ro.carrier", carrier[0] ? carrier : "unknown");
20.设置引导程序的版本号属性值。
property_set("ro.bootloader",bootloader[0]?bootloader: "unknown");
21.设置硬件信息属性值。
property_set("ro.hardware", hardware);
22.设置硬件版本号属性值
snprintf(tmp, PROP_VALUE_MAX, "%d", revision);
property_set("ro.revision", tmp);
23.添加所有的init命令到队列,然后再执行。
action_for_each_trigger("init", action_add_queue_tail);
drain_action_queue();
24.加载system和data目录下的属性,并启动属性监听服务。
property_set_fd = start_property_service();
加载的属性文件为:
#define PROP_PATH_SYSTEM_BUILD "/system/build.prop"
#define PROP_PATH_SYSTEM_DEFAULT "/system/default.prop"
#define PROP_PATH_LOCAL_OVERRIDE "/data/local.prop"
25.创建一个全双工的通讯机制的两个SOCKET,信号可以在signal_fd和
signal_recv_fd双向通讯,从而建立起沟通的管道。这个信号管理,就是用来让init进程与它的子进程进行沟通的,子进程从signal_fd写入信息,init进程从signal_recv_fd收到信息,然后再做处理。
if (socketpair(AF_UNIX, SOCK_STREAM, 0, s) == 0) {
signal_fd = s[0];
signal_recv_fd = s[1];
fcntl(s[0], F_SETFD, FD_CLOEXEC);
fcntl(s[0], F_SETFL, O_NONBLOCK);
fcntl(s[1], F_SETFD, FD_CLOEXEC);
fcntl(s[1], F_SETFL, O_NONBLOCK);
}
26.判断设备文件系统device_fd是否成功初始化,属性服务property_set_fd
是否成功初始化,信号通讯机制signal_recv_fd是否成功初始化。
if ((device_fd < 0)||(property_set_fd < 0)||(signal_recv_fd < 0)) { ERROR("init startup failure\n");
return 1;
}
27.执行early-boot和boot属性的命令。
action_for_each_trigger("early-boot", action_add_queue_tail);
action_for_each_trigger("boot", action_add_queue_tail);
drain_action_queue();
28.执行当前载入的属性命令。并标明属性触发器已经初始化完成。
queue_all_property_triggers();
drain_action_queue();
property_triggers_enabled = 1;
29.保存设备文件系统device_fd,属性服务property_set_fd,信号通讯机制
signal_recv_fd,以便后面轮询使用。
ufds[0].fd = device_fd;
ufds[0].events = POLLIN;
ufds[1].fd = property_set_fd;
ufds[1].events = POLLIN;
ufds[2].fd = signal_recv_fd;
ufds[2].events = POLLIN;
fd_count = 3;
30.判断是否处理组合键轮询。
if (keychord_fd > 0) {
ufds[3].fd = keychord_fd;
ufds[3].events = POLLIN;
fd_count++;
} else {
ufds[3].events = 0;
ufds[3].revents = 0;
}
31.初始化linux程序启动速度的性能分析工具。
#if BOOTCHART
bootchart_count = bootchart_init();
if (bootchart_count < 0) {
ERROR("bootcharting init failure\n");
} else if (bootchart_count > 0) {
NOTICE("bootcharting started (period=%d ms)\n",\
bootchart_count*BOOTCHART_POLLING_MS);
} else {
NOTICE("bootcharting ignored\n");
}
#endif
32.进入主进程循环,重置轮询事件状态、查询action队列,并执行、重启需
要重启的服务、轮询注册的事件状态。
for(;;) {
int nr, i, timeout = -1;
for (i = 0; i < fd_count; i++){
ufds[i].revents = 0;
}
drain_action_queue();
restart_processes();
if (process_needs_restart) {
timeout = (process_needs_restart - gettime()) * 1000;
if (timeout < 0)
timeout = 0;
}
#if BOOTCHART
if (bootchart_count > 0) {
if (timeout < 0 || timeout > BOOTCHART_POLLING_MS)
timeout = BOOTCHART_POLLING_MS;
if (bootchart_step() < 0 || --bootchart_count == 0) {
bootchart_finish();
bootchart_count = 0;
}
}
#endif
nr = poll(ufds, fd_count, timeout);
if (nr <= 0)
continue;
if (ufds[2].revents == POLLIN) {
/* we got a SIGCHLD - reap and restart as needed */
read(signal_recv_fd, tmp, sizeof(tmp));
while (!wait_for_one_process(0))
;
continue;
}
if (ufds[0].revents == POLLIN)
handle_device_fd(device_fd);
if (ufds[1].revents == POLLIN)
handle_property_set_fd(property_set_fd);
if (ufds[3].revents == POLLIN)
handle_keychord(keychord_fd);
}
三、init.rc 脚本加载流程分析
1、init.rc 脚本语法介绍
Android初始化语言由四大类声明组成:
行为类(Actions),命令类(Commands),服务类(Services),选项类(Options)。
* 初始化语言以行为单位,由以空格间隔的语言符号组成。
C风格的反斜杠转义符可以用来插入空白到语言符号。双引号也可以用来防止文本被空格分成多个语言符号。当反斜杠在行末时,作为折行符。
* 以#开始(前面允许有空格)的行为注释行。
* Actions和Services隐含声明一个新的段落。所有该段落下Commands或Options的声明属于该段落。第一段落前的Commands或Options被忽略。
* Actions和Services拥有独一无二的命名。在它们之后声明相同命名的类将被当作错误并忽略。
●Actions
Actions是一系列命令的命名。Actions拥有一个触发器(trigger)用来决定action何时执行。当一个action在符合触发条件被执行时,如果它还没被加入到待执行队列中的话,则加入到队列最后。
队列中的action依次执行,action中的命令也依次执行。Init在执行命令的中间处理其它活动(设备创建/销毁,property设置,进程重启)。
Actions语法形式为:
on
...
●Services
Services是由init启动,在它们退出时重启(可选)。
Service表现形式为:
service
...
●Options
Options是Services的修饰,它们影响init何时、如何运行service. critical
这是一个设备关键服务(device-critical service) .
如果它在4分钟内退出超过4次,设备将重启并进入恢复模式。
disabled
该服务将不会自动启动,它必须被依照服务名指定启动才可以启动。setenv
设置已启动的进程的环境变量
socket
创建一个名为/dev/socket/
在执行服务前改变用户名。
group
在执行服务前改变组。在第一个组后的组将设为进程附加组
(通过setgroups()).当前默认为root.
oneshot
在服务退出后不重启。
class
为service指定一个类别名。同样类名的所有的服务可以一起启动或停止。
如果没有指定类别的服务默认为"default"类。
onrestart
当服务重启时执行一个命令。
Triggers
触发器是一个字符串,可以用来匹配某种类型的事件并执行一个action。Boot
这是当init开始后执行的第一个触发器(当/init.conf被加载)
当property
device-added-
device-removed-
当设备节点被添加或移除时触发。
service-exited-
当指定的服务存在时触发
Commands
exec
Fork并执行一个程序(
export
设定全局环境变量
ifup
使网络接口
import
解析一个init配置文件,扩展当前配置文件。
hostname
设置主机名
chmod
改变文件访问权限
chown
改变文件所属和组
class_start
当指定类别的服务没有运行,启动该类别所有的服务。
class_stop
当指定类别的服务正在运行,停止该类别所有的服务。
domainname
设置域名。
insmod
加载该路径
mkdir
在
mount
尝试mount
设置系统property
setrlimit
设置resource的rlimit.
start
启动一个没有运行的服务。
stop
停止一个正在运行的服务。
symlink
创建一个
sysclktz
设置系统时区(GMT为0)
trigger
触发一个事件。用于调用其它action。
write
打开
Properties
Init会更新一些系统property以提供查看它当前的状态。
init.action
当前正在执行的action,如果没有则为""
https://www.doczj.com/doc/495902299.html,mand
被执行的命令,如果没有则为""
init.svc.
命名为
2、init.rc 脚本启动的服务介绍
●service console /system/bin/sh
console
sh服务的代码在目录:froyo/system/core/sh
sh服务是控制台服务,是从NetBSD移植过来的,它的命令也是比较有限。
sh服务使用flex工具生成词法分析代码,使用bison生成语法分析代码。
●service adbd /sbin/adbd
disabled
adbd服务的代码在目录:froyo/system/core/adb
adbd服务是adb调试系统中的一部分,整个adb调试系统包括有三部分:手机运行的adbd服务
PC运行的服务器
PC运行的客户端
当android启动时,就运行adbd服务,创建一个调试端口,这样就可以让开发机器上的服务器连接过来,通过这个连接就可以发送调试信息给服务器,也可以接收到外面发送过来的调试命令。
adbd依据下面的条件启动或停止。
on property:ro.kernel.qemu=1
start adbd
on property:persist.service.adb.enable=1
start adbd
on property:persist.service.adb.enable=0
stop adbd
●service servicemanager /system/bin/servicemanager
user system
critical
onrestart restart zygote
onrestart restart media
servicemanager服务的代码在目录:
froyo/frameworks/base/cmds/servicemanager
servicemanager服务的作用主要是服务管理。所谓的服务管理其实就是获取服务、检查服务、添加服务、枚举所有服务。服务管理器是一个容器管理器,方便服务添加、调用和删除。在应用层的程序,都向这个服务管理器获取需要使用的服务,而所有提供服务的程序,都向这个服务器管理器注册自己的服务。服务管理器是应用程序与服务沟通的桥梁。
service vold /system/bin/vold
socket vold stream 0660 root mount
ioprio be 2
vold服务的代码在目录:froyo/system/core/vold
vold服务的作用主要是负责完成系统的动态卷管理,比如cdrom、u盘、mmc 卡等外存储的管理。当有这外存储设备插入时,就需要监视这种变化,并加载相应的驱动程序,然后报告给系统和应用程序有新存储设备可以使用。
vold处理过程大致分为三步:
1)创建链接:
在vold作为一个守护进程,一方面接受驱动的信息,并把信息传给应用层;另一方面接受上层的命令并完成相应。所以这里的链接一共有两条:
A.vold socket: 负责vold与应用层的信息传递;
B.访问udev的socket: 负责vold与底层的信息传递;
这两个链接都是在进程的一开始完成创建的。
2)引导:
这里主要是在vold启动时,对现有外设存储设备的处理。首先,要加载并解析vold.conf,并检查挂载点是否已经被挂载;其次,执行MMC卡挂载;
最后,处理USB大容量存储。
3)事件处理:
这里通过对两个链接的监听,完成对动态事件的处理,以及对上层应用操作的响应。
●service debuggerd /system/bin/debuggerd
●service zygote
/system/bin/app_process -Xzygote
/system/bin --zygote --start-system-server
socket zygote stream 666
onrestart write /sys/android_power/request_state wake
onrestart write /sys/power/state on
onrestart restart media
zygote服务的代码在目录:froyo/frameworks/base/cmds/app_process zygote服务主要作用就是创建一个服务监听用户的命令,并且根据用户的命令创建应用程序运行。所有的java应用程序进程都是由zygote派生出来的。
是虚拟机实例的孵化器。
●service media /system/bin/mediaserver
user media
group system audio camera graphics inet net_bt net_bt_admin
ioprio rt 4
mediaserver服务的代码在目录:
froyo/frameworks/base/media/mediaserver
mediaserver服务是多媒体服务的守护进程,负责多媒体/照相机/音频等三项服务。
●service bootanim /system/bin/bootanimation
user graphics
group graphics
disabled
oneshot
bootanimation 服务的代码在目录:
froyo/frameworks/base/cmds/bootanimation
bootanimation 服务是开机动画,主要用来加载动画资源。
●service dbus /system/bin/dbus-daemon --system --nofork
socket dbus stream 660 bluetooth bluetooth
user bluetooth
group bluetooth net_bt_admin
dbus服务的代码在目录:
froyo/external/dbus/bus
dbus服务是android使用的一种特殊的进程间通讯系统。它具有面向对象接口的协议,以及应用程序之间互相发现和监视的守护进程。dbus设计用来作为用户与系统服务之间的分隔以及系统服务之间的通讯。因此,dbus通讯安全,但效率有点差。
●service bluetoothd /system/bin/bluetoothd -n
socket bluetooth stream 660 bluetooth bluetooth
socket dbus_bluetooth stream 660 bluetooth bluetooth
group bluetooth net_bt_admin misc
一,系统引导bootloader 加电,cpu执行bootloader程序,正常启动系统,加载boot.img【其中包含内核。还有ramdisk】 二,内核kernel bootloader加载kernel,kernel自解压,初始化,载入built-in驱动程序,完成启动。 内核启动后会创建若干内核线程,在后装入并执行程序/sbin/init/,载入init process,切换至用户空间(user-space) 内核zImage解压缩 head.S【这是ARM-Linux运行的第一个文件,这些代码是一个比较独立的代码包裹器。其作用就是解压Linux内核,并将PC指针跳到内核(vmlinux)的第一条指令】首先初始化自解压相关环境(内存等),调用decompress_kernel进行解压,解压后调用start_kernel启动内核【start_kernel是任何版本linux内核的通用初始化函数,它会初始化很多东西,输出linux版本信息,设置体系结构相关的环境,页表结构初始化,设置系 统自陷入口,初始化系统IRQ,初始化核心调度器等等】,最后调用rest_init【rest_init 会调用kernel_init启动init进程(缺省是/init)。然后执行schedule开始任务调度。这个init是由android的./system/core/init下的代码编译出来的,由此进入了android的代码】。 三,Init进程启动 【init是kernel启动的第一个进程,init启动以后,整个android系统就起来了】 init进程启动后,根据init.rc 和init.
Android的开机流程 1. 系统引导bootloader 1) 源码:bootable/bootloader/* 2) 说明:加电后,CPU将先执行bootloader程序,此处有三种选择 a) 开机按Camera+Power启动到fastboot,即命令或SD卡烧写模式,不加载内核及文件系统,此处可以进行工厂模式的烧写 b) 开机按Home+Power启动到recovery模式,加载recovery.img,recovery.i mg包含内核,基本的文件系统,用于工程模式的烧写 c) 开机按Power,正常启动系统,加载boot.img,boot.img包含内核,基本文件系统,用于正常启动手机(以下只分析正常启动的情况) 2. 内核kernel 1) 源码:kernel/* 2) 说明:kernel由bootloader加载 3. 文件系统及应用init 1) 源码:system/core/init/* 2) 配置文件:system/rootdir/init.rc, 3) 说明:init是一个由内核启动的用户级进程,它按照init.rc中的设置执行:启动服务(这里的服务指linux底层服务,如adbd提供adb支持,vold提供SD卡挂载等),执行命令和按其中的配置语句执行相应功能 4. 重要的后台程序zygote 1)源码:frameworks/base/cmds/app_main.cpp等 2) 说明:zygote是一个在init.rc中被指定启动的服务,该服务对应的命令是/system/bin/app_process a)建立Java Runtime,建立虚拟机 b) 建立Socket接收ActivityManangerService的请求,用于Fork应用程序 c) 启动System Server 5. 系统服务system server 1)源码:frameworks/base/services/java/com/android/server/SystemServer.jav a 2) 说明:被zygote启动,通过SystemManager管理android的服务(这里的服务指frameworks/base/services下的服务,如卫星定位服务,剪切板服务等) 6. 桌面launcher 1)源码:ActivityManagerService.java为入口,packages/apps/launcher*实现 2) 说明:系统启动成功后SystemServer使用xxx.systemReady()通知各个服务,系统已经就绪,桌面程序Home就是在ActivityManagerService.systemReady()通知的过程中建立的,最终调用()启launcher 7. 解锁 1) 源码: frameworks/policies/base/phone/com/android/internal/policy/impl/*lock* 2) 说明:系统启动成功后SystemServer调用wm.systemReady()通知WindowManagerService,进而调用PhoneWindowManager,最终通过LockPatternKeyguardView显示解锁界面,跟踪代码可以看到解锁界面并不是一个Activity,这是只是向特定层上绘图,其代码了存放在特殊的位置
开机启动花了40多秒,正常开机只需要28秒就能开机起来。 内核的启动我没有去分析,另一个同事分析的。我主要是分析从SystemServer启来到开机动画结束显示解锁界面的这段时间,也就是开机动画的第三个动画开始到结束这段时间,这是个比较耗时阶段,一般都在17秒左右(见过牛B的手机,只需5秒)。 SystemServer分两步执行:init1和init2。init1主要是初始化native的服务,代码在sy stem_init.cpp的system_init,初始化了SurfaceFlinger和SensorService这两个native的服务。init2启动的是java的服务,比如ActivityManagerService、WindowManagerService、PackageManagerService等,在这个过程中PackageManagerService用的时间最长,因为PackageManagerService会去扫描特定目录下的jar包和apk文件。 在开机时间需要40多秒的时,从Log上可以看到,从SurfaceFlinger初始化到动画结束,要27秒左右的时间,即从SurfaceFlinger::init的LOGI("SurfaceFlinger is starting")这句Log到void SurfaceFlinger::bootFinished()的LOGI("Boot is finished (%ld ms)", long(ns 2ms(duration)) ),需要27秒左右的时间,这显然是太长了,但到底是慢在哪了呢?应该在个中间的点,二分一下,于是想到了以启动服务前后作为分隔:是服务启动慢了,还是在服务启动后的这段时间慢?以ActivityManagerService的Slog.i(TAG, "System now ready")的这句Log为分割点,对比了一下,在从SurfaceFlinger is starting到System now read y多了7秒左右的时间,这说明SystemServer在init1和init2过程中启动慢了,通过排查,发现在init1启动的时候,花了7秒多的时间,也就是system_init的LOGI("Entered system _init()")到LOGI("System server: starting Android runtime.\n")这段时间用了7秒多,而正常情况是400毫秒便可以初始化完,通过添加Log看到,在SensorService启动时,用了比较长的时间。 不断的添加Log发现,在启动SensorService时候,关闭设备文件变慢了,每次关闭一个/dev/input/下的设备文件需要100ms左右,而SensorService有60~70次的关闭文件,大概有7s左右的时间。 调用流程是: frameworks/base/cmds/system_server/library/system_init.cpp: system_init->SensorServi ce::instantiate frameworks/native/services/sensorservice/SensorService.cpp: void SensorService::onFi rstRef()->SensorDevice& dev(SensorDevice::getInstance()) hardware/libsensors/SensorDevice.cpp: SensorDevice::SensorDevice()->sensors_open hardware/libsensors/sensors.cpp: open_sensors->sensors_poll_context_t sensors_poll_context_t执行打开每个传感器设备时,遍历/dev/input/目录下的设备文件,以匹配当前需要打开的设备,遍历文件是在 hardware/libsensors/SensorBase.cpp的openInput下实现,如果打开的设备文件不是正在打开的设备文件,会执行下面语句的else部分: if (!strcmp(name, inputName)) { strcpy(input_name, filename); break;
基于MT6752的Android系统启动流程分析报告 1、Bootloader引导 (2) 2、Linux内核启动 (23) 3、Android系统启动 (23) 报告人: 日期:2016.09.03
对于Android整个启动过程来说,基本可以划分成三个阶段:Bootloader引导、Linux kernel启动、Android启动。但根据芯片架构和平台的不同,在启动的Bootloader阶段会有所差异。 本文以MTK的MT6752平台为例,分析一下基于该平台的Android系统启动流程。 1、Bootloader引导 1.1、Bootloader基本介绍 BootLoader是在操作系统运行之前运行的一段程序,它可以将系统的软硬件环境带到一个合适状态,为运行操作系统做好准备,目的就是引导linux操作系统及Android框架(framework)。 它的主要功能包括设置处理器和内存的频率、调试信息端口、可引导的存储设备等等。在可执行环境创建好之后,接下来把software装载到内存并执行。除了装载software,一个外部工具也能和bootloader握手(handshake),可指示设备进入不同的操作模式,比如USB下载模式和META模式。就算没有外部工具的握手,通过外部任何组合或是客户自定义按键,bootloader也能够进入这些模式。 由于不同处理器芯片厂商对arm core的封装差异比较大,所以不同的arm处理器,对于上电引导都是由特定处理器芯片厂商自己开发的程序,这个上电引导程序通常比较简单,会初始化硬件,提供下载模式等,然后才会加载通常的bootloader。 下面是几个arm平台的bootloader方案: marvell(pxa935) : bootROM + OBM + BLOB informax(im9815) : bootROM + barbox + U-boot mediatek(mt6517) : bootROM + pre-loader + U-boot broadcom(bcm2157) : bootROM + boot1/boot2 + U-boot 而对MT6752平台,MTK对bootloader引导方案又进行了调整,它将bootloader分为以下两个部分: (1) 第1部分bootloader,是MTK内部(in-house)的pre-loader,这部分依赖平台。 (2) 第2部分bootloader,是LK(little kernel的缩写,作用同常见的u-boot差不多),这部分依赖操作系统,负责引导linux操作系统和Android框架。 1.2、bootloader的工作流程 1.2.1 bootloader正常的启动流程 先来看启动流程图:
linux内核启动+Android系统启动过程详解 第一部分:汇编部分 Linux启动之 linux-rk3288-tchip/kernel/arch/arm/boot/compressed/ head.S分析这段代码是linux boot后执行的第一个程序,完成的主要工作是解压内核,然后跳转到相关执行地址。这部分代码在做驱动开发时不需要改动,但分析其执行流程对是理解android的第一步 开头有一段宏定义这是gnu arm汇编的宏定义。关于GUN 的汇编和其他编译器,在指令语法上有很大差别,具体可查询相关GUN汇编语法了解 另外此段代码必须不能包括重定位部分。因为这时一开始必须要立即运行的。所谓重定位,比如当编译时某个文件用到外部符号是用动态链接库的方式,那么该文件生成的目标文件将包含重定位信息,在加载时需要重定位该符号,否则执行时将因找不到地址而出错 #ifdef DEBUG//开始是调试用,主要是一些打印输出函数,不用关心 #if defined(CONFIG_DEBUG_ICEDCC)
……具体代码略 #endif 宏定义结束之后定义了一个段, .section ".start", #alloc, #execinstr 这个段的段名是 .start,#alloc表示Section contains allocated data, #execinstr表示Section contains executable instructions. 生成最终映像时,这段代码会放在最开头 .align start: .type start,#function /*.type指定start这个符号是函数类型*/ .rept 8 mov r0, r0 //将此命令重复8次,相当于nop,这里是为中断向量保存空间 .endr b 1f .word 0x016f2818 @ Magic numbers to help the loader
洛阳理工学院 课程设计报告 课程名称嵌入式系统课程设计 设计题目 Android开机动画及声音制作专业 班级 学号 姓名 完成日期 2017年月日
课程设计任务书 设计题目:Android开机动画与声音制作 设计内容与要求: 修改Android开机动画和声音的是建立自定义Android系统的入门课程和基本功。Android系统的开机动画需要修改和设定bootanimation.zip文件,修改开机声音需要自定义OGG文件并导入系统指定位置。 题目的基本要求如下: 1. 寻找并下载合适的开机视频; 2. 将视频转换成连续的PNG图像文件; 3. 修改desc.txt文件并打包bootanimation.zip文件; 4. 获取合适的开机声音并利用格式工厂工具转换为OGG格式; 5. 通过adb shell指令,进入控制板系统内并修改android系统文件只读属性; 6. 点击开发板的“复位”进行复位,重启开发板查看修改结果。 指导教师: 年6月日 课程设计评语 成绩: 指导教师:_______________ 年月日
目录 第1章概述 (2) 1.1 Android应用平台简介 (2) 1.2 RK2928开发板介绍 (2) 第2章 Android开机动画及声音制作 (5) 2.1 基本操作流程 (5) 2.2 开机动画的制作与添加 (6) 2.3 开机声音的制作与添加 (11) 2.4 开机动画及声音结果 (12) 第3章心得体会 (13)
第1章概述 1.1 Android应用平台简介 Android一词的本义指“机器人”,同时也是Google于2007年11月5日宣布的基于Linux平台的开源手机操作系统的名称,该平台由操作系统、中间件、用户界面和应用软件组成。Android是一种基于Linux的自由及开放源代码的操作系统,主要使用于移动设备,如智能手机和平板电脑,由Google公司和开放手机联盟领导及开发。尚未有统一中文名称,中国大陆地区较多人使用“安卓”或“安致”。Android操作系统最初由Andy Rubin开发,主要支持手机。2005年8月由Google收购注资。2007年11月,Google与84家硬件制造商、软件开发商及电信营运商组建开放手机联盟共同研发改良Android系统。随后Google以Apache开源许可证的授权方式,发布了Android的源代码。第一部Android智能手机发布于2008年10月。Android逐渐扩展到平板电脑及其他领域上,如电视、数码相机、游戏机等。2011年第一季度,Android在全球的市场份额首次超过塞班系统,跃居全球第一。2013年的第四季度,Android平台手机的全球市场份额已经达到78.1%。 1.2 RK2928开发板介绍 图1-1 实验板外观 作为RK292系列里较为高级的芯片之一,RK2928提供了比较不错的性能。较RK2926,RK2928集成了HDMI 1.4a控制器及GPS基带的支持,为300元价
Android的开机流程 1. 系统引导bootloader 1) 源码: bootable/bootloader/* 2) 说明: 加电后, CPU将先执行bootloader程序, 此处有三种选择 a) 开机按Camera+Power启动到fastboot, 即命令或SD卡烧写模式, 不加载内核及文件系统, 此处能够进行工厂模式的烧写 b) 开机按Home+Power启动到recovery模式, 加载recovery.img, recovery.img包含内核, 基本的文件系统, 用于工程模式的烧写 c) 开机按Power, 正常启动系统, 加载boot.img, boot.img包含内核, 基本文件系统, 用于正常启动手机( 以下只分析正常启动的情况) 2. 内核kernel 1) 源码: kernel/* 2) 说明: kernel由bootloader加载 3. 文件系统及应用init 1) 源码: system/core/init/* 2) 配置文件: system/rootdir/init.rc, 3) 说明: init是一个由内核启动的用户级进程, 它按照init.rc中的设置执行: 启动服务( 这里的服务指linux底层服务, 如adbd提供adb支持, vold提供SD卡挂载等) , 执行命令和按其中的配置语句执行相应功能 4. 重要的后台程序zygote 1) 源码: frameworks/base/cmds/app_main.cpp等 2) 说明: zygote是一个在init.rc中被指定启动的服务, 该服务对应的命令是/system/bin/app_process
Android系统启动过程详解 Android系统启动过程 首先Android框架架构图:(来自网上,我觉得这张图看起来很清晰) Linux内核启动之后就到Android Init进程,进而启动Android相关的服务和应用。 启动的过程如下图所示:(图片来自网上,后面有地址)
下面将从Android4.0源码中,和网络达人对此的总结中,对此过程加以学习了解和总结, 以下学习过程中代码片段中均有省略不完整,请参照源码。
一Init进程的启动 init进程,它是一个由内核启动的用户级进程。内核自行启动(已经被载入内存,开始运行, 并已初始化所有的设备驱动程序和数据结构等)之后,就通过启动一个用户级程序init的方式,完成引导进程。init始终是第一个进程。 启动过程就是代码init.c中main函数执行过程:system\core\init\init. c 在函数中执行了:文件夹建立,挂载,rc文件解析,属性设置,启动服务,执行动作,socket监听…… 下面看两个重要的过程:rc文件解析和服务启动。 1 rc文件解析 .rc文件是Android使用的初始化脚本文件(System/Core/Init/readm e.txt中有描述: four broad classes of statements which are Actions, Commands, Services, and Options.) 其中Command 就是系统支持的一系列命令,如:export,hostname,mkdir,mount,等等,其中一部分是linux 命令, 还有一些是android 添加的,如:class_start
Android SystemBar启动流程分析 SystemBars的服务被start时,最终会调用该类的onNoService()方法。 @Override public void start() { if (DEBUG) Log.d(TAG, "start"); ServiceMonitor mServiceMonitor = new ServiceMonitor(TAG, DEBUG, mContext, Settings.Secure.BAR_SERVICE_COMPONENT, this); mServiceMonitor.start(); // will call onNoService if no remote service is found } @Override public void onNoService() { if (DEBUG) Log.d(TAG, "onNoService"); createStatusBarFromConfig(); // fallback to using an in-process implementation } private void createStatusBarFromConfig() { … mStatusBar = (BaseStatusBar) cls.newInstance(); … mStatusBar.start(); } BaseStatusBar是一个抽象类,故调用其子类的PhoneStatusBar的start 函数。 @Override public void start() { … super.start(); … } 子类的start又调用了父类的start public void start() { … createAndAddWindows(); … }
Android L系统启动及加载流程分析 1、概述 Android L的启动可以分为几个步骤:Linux内核启动、init进程启动、native系统服务及java系统服务启动、Home启动,主要过程如下图: 图1 整个启动流程跟4.4及之前的版本相差不多,只是有个别不同之处,本文我们主要分析Linux内核启动之后的过程。
2、启动过程分析 2.1 init进程启动 当系统内核加载完成之后,会启动init守护进程,它是内核启动的第一个用户级进程,是Android的一个进程,进程号为1,init进程启动后执行入口函数main(),主要操作为: 图2 AndroidL上将selinux的安全等级提高了,设为了enforcing模式,4.4上是permissive模式。 解析rc脚本文件,即init.rc脚本,该文件是Android初始化脚本,定义了一系列的动作和执行这些动作的时间阶段e aryl-init、init、early-boot、boot、post-fs等阶段。init进程main 函数中会根据这些阶段进行解析执行。AndroidL上为了流程更清晰,增加了charger(充电开机)、ffbm(工厂模式)、以及late-init阶段,实际上这些阶段是对其他阶段的组合执行,比如late-init:
2.2 ServiceManager的启动 servicemanager的启动就是init进程通过init.rc脚本启动的: 源码在frameworks/native/cmds/servicemanager/service_manager.c中,servicemanager是服务管理器,它本身也是一个服务(handle=0),通过binder调用,为native和Java系统服务提供注册和查询服务的,即某个服务启动后,需要将自己注册到servicemanager中,供其他服务或者应用查询使用。AndroidL上servicemanger中在处理注册和查询动作之前添加了selinux安全检测相关的处理。 2.3 SurfaceFinger、MediaServer进程启动 Android4.4以前,surfacefinger的启动根据属性system_init.startsurfaceflinger,决定是通过init.rc启动还是systemserver进程启动,之后的版本包括AndoridL都是通过init.rc启动的: 启动后会向servicemanager进程注册服务中,该服务启动时主要功能是初始化整个显
android开机启动流程简单分析 android启动 当引导程序启动Linux内核后,会加载各种驱动和数据结构,当有了驱动以后,开始启动Android系统同时会加载用户级别的第一个进程init(system\core\init\init.cpp)代码如下: int main(int argc, char** argv) { ..... //创建文件夹,挂载 // Get the basic filesystem setup we need put together in the initramdisk // on / and then we'll let the rc file figure out the rest. if (is_first_stage) { mount("tmpfs", "/dev", "tmpfs", MS_NOSUID, "mode=0755"); mkdir("/dev/pts", 0755); mkdir("/dev/socket", 0755); mount("devpts", "/dev/pts", "devpts", 0, NULL); #define MAKE_STR(x) __STRING(x) mount("proc", "/proc", "proc", 0, "hidepid=2,gid=" MAKE_STR(AID_READPROC)); mount("sysfs", "/sys", "sysfs", 0, NULL); } ..... //打印日志,设置log的级别 klog_init(); klog_set_level(KLOG_NOTICE_LEVEL); ..... Parser& parser = Parser::GetInstance(); parser.AddSectionParser("service",std::make_unique
Android ninja编译启动过程分析 ---make是如何转换到到ninja编译的 1.首先你的得对make的工作机制有个大概的了解: 运行的命令在要编译的目录下运行make,或者make target_name a.分析处理保存阶段(没有实际编译动作):它首先对当前目录下的Makefile文件的做一次扫描,语法分析,还有处理,主要是变量的保存,目标依赖列表生成,目标下的action列表的生成,然后记住 b.然后按记住的目标执行action列表动作(有实际编译动作). 编译启动的入口方式还是运行make: 2开始make-jxxx方式进入.....(xxx是本机cpu的数量) make开始做进行第一次扫描.... 目前USE_NINJA还是没有定义,估计以后很久很久才能启用的了! BUILDING_WITH_NINJA开始也是没定义的 看make扫描入口文件: Makefile: include build/core/main.mk 在build/core/main.mk: 在ninia之前都有include help.mk和config.mk 97include$(BUILD_SYSTEM)/help.mk 98 99#Set up various standard variables based on configuration 100#and host information. 101include$(BUILD_SYSTEM)/config.mk 说明make help//显示make帮助make config//当前显示配置 103relaunch_with_ninja:= 104ifneq($(USE_NINJA),false) 105ifndef BUILDING_WITH_NINJA<==第二次扫描不会到这里了 106relaunch_with_ninja:=true 107endif 108endif 116ifeq($(relaunch_with_ninja),true)<===第一次扫描入这里了 117#Mark this is a ninja build. 118$(shell mkdir-p$(OUT_DIR)&&touch$(OUT_DIR)/ninja_build) 119include build/core/ninja.mk//---进入ninja.mk 第一次扫描到此为止就结束掉了,因为在当前ifeq else endif后面没有代码了 120else#///!relaunch_with_ninja<===第二次扫描入这里了
一、Android开机启动流程简介 1、OS-level: 由bootloader载入linux kernel后kernel开始初始化, 并载入built-in 的驱动程序。Kernel完成开机后,载入init process,切换至user-space。 Init进程是第一个在user-space启动的进程。 2、Android-level: 由init process读取init.rc,Native 服务启动,并启动重要的外部程序,例如:servicemanager、Zygote以及System Server等。 由 init process 根据硬件类型读取init.xxx.rc。由init.xxx.rc加载init.xxx.sh。 由 init.xxx.sh 加载特定的硬件驱动。如hi_tuner.ko、hi_demux.ko等。 3、Zygote-Mode: Zygote 启动完SystemServer 后,进入Zygote Mode,在Socket 等候命令。 随后,使用者将看到一个桌面环境(Home Screen)。桌面环境由一个名为[Launcher]的应用程序负责提供。 本文档重点研究Android-level中的启动流程。 启动流程如下图所示:
二、init process流程分析 init进程简介 init进程是第一个在user-space启动的进程。由内核启动参数[init]传递给内核,如果该项没有设置,内核会按 /etc/init,/bin/init,/sbin/init,/bin/sh的顺序进行尝试,如果都有的都没找到,内核会抛出 kernel panic:的错误。
A n d r o i d系统启动升级 流程 TTA standardization office【TTA 5AB- TTAK 08- TTA 2C】
摘要 本文首先介绍了Android系统更新要用到的一些概念:硬件、三种模式及相互之间的通信。然后介绍了Android系统的启动和升级流程。 概述 通常,Android系统的升级包名称为update.zip。Android系统内部自带了烧写升级包的工具,我们可以手动烧写,也可以通过某些机制自动更新系统。同时,我们可以手动修改和制作升级包。本文主要阐述在Android系统升级中用到的一些概念,本文只是作为索引,并不涉及到具体的烧写工作。本文基于Android系统的版本:4.0.4。 硬件 Android系统的烧写,是非常贴近硬件的。一是,烧写是在实实在在的硬件上操作的。二则,有时在翻阅源码的时候,需要知道硬件的类型,以便找到和硬件相对应的源码。 烧写相关的硬件主要有三部分:CPU、内存和nand flash。当然,只是相对本文而言。CPU用来执行程序中的指令。内存只是在运行中,将需要运行的程序加载其中并运行,关机后即消失。nandflash用来存储程序的数据,它会一直存在。系统启动时,会将nand flash上的操作系统加载到内存,然后运行在CPU 中,对于非系统程序,按需加载到内存中运行。了解这些,有助于了解整个烧写的过程。 在板子上,可以通过下面的命令,查看CPU的信息: [plain] cat /proc/cpuinfo 通过如下命令查看内存的信息: [plain] cat /proc/meminfo nand flash是需要分区的,每个分区中对应了Android系统烧写包中不同的image,比如:boot、system分区等。可以通过如下命令来查看nand flash 的分区情况: [plain] cat /proc/mtd # 查看分区状况 通常,nand flash包含了以下分区: 开机动画:用于在开机或者升级过程中显示在屏幕上的内容。 boot:用于Android系统的正常启动 recovery:用于Android系统进入recovery模式下,参见本文后续介绍。 misc:用于保存BCB的内容,参见本文后续介绍。
Android系统的开机画面显示过程分析 分类:Android2012-07-0900:561252人阅读评论(39)收藏举报 好几个月都没有更新过博客了,从今天开始,老罗将尝试对Android系统的UI实现作一个系统的分析,也算是落实之前所作出的承诺。提到Android系统的UI,我们最先接触到的便是系统在启动过程中所出现的画面了。Android系统在启动的过程中,最多可以出现三个画面,每一个画面都用来描述一个不同的启动阶段。本文将详细分析这三个开机画面的显示过程,以便可以开启我们对Android系统UI实现的分析之路。 第一个开机画面是在内核启动的过程中出现的,它是一个静态的画面。第二个开机画面是在init进程启动的过程中出现的,它也是一个静态的画面。第三个开机画面是在系统服务启动的过程中出现的,它是一个动态的画面。无论是哪一个画面,它们都是在一个称为帧缓冲区(frame buffer,简称fb)的硬件设备上进行渲染的。接下来,我们就分别分析这三个画面是如何在fb上显示的。 1.第一个开机画面的显示过程 Android系统的第一个开机画面其实是Linux内核的启动画面。在默认情况下,这个画面是不会出现的,除非我们在编译内核的时候,启用以下两个编译选项: CONFIG_FRAMEBUFFER_CONSOLE CONFIG_LOGO 第一个编译选项表示内核支持帧缓冲区控制台,它对应的配置菜单项为:Device Drivers--->Graphics support--->Console display driver support--->Framebuffer Console support。第二个编译选项表示内核在启动的过程中,需要显示LOGO,它对应的配置菜单项为:Device Drivers--->Graphics support--->Bootup logo。配置Android 内核编译选项可以参考在Ubuntu上下载、编译和安装Android最新内核源代码(Linux Kernel)一文。 帧缓冲区硬件设备在内核中有一个对应的驱动程序模块fbmem,它实现在文件kernel/goldfish/drivers/video/fbmem.c中,它的初始化函数如下所示: 1/**
上文介绍了Android应用程序的启动过程,即应用程序默认Activity的启动过程,一般来说,这种默认Activity是在新的进程和任务中启动的;本文将继续分析在应用程序内部启动非默认Activity的过程的源代码,这种非默认Activity一般是在原来的进程和任务中启动的。 这里,我们像上一篇文章Android应用程序启动过程源代码分析一样,采用再上一篇文章Android 应用程序的Activity启动过程简要介绍和学习计划所举的例子来分析在应用程序内部启动非默认Activity的过程。 在应用程序内部启动非默认Activity的过程与在应用程序启动器Launcher中启动另外一个应用程序的默认Activity的过程大体上一致的,因此,这里不会像上文Android应用程序启动过程源代码分析一样详细分析每一个步骤,我们着重关注有差别的地方。 回忆一下Android应用程序的Activity启动过程简要介绍和学习计划一文所用的应用程序Activity,它包含两个Activity,分别是MainActivity和SubActivity,前者是应用程序的默认Activity,后者是非默认Activity。MainActivity启动起来,通过点击它界面上的按钮,便可以在应用程序内部启动SubActivity。 我们先来看一下应用程序的配置文件AndroidManifest.xml,看看这两个Activity是如何配置的:view plain 1. 2.
Android系统完整的启动过程,从系统层次角度可分为Linux系统层、Android系统服务层、Zygote进程模型三个阶段;从开机到启动Home Launcher完成具体的任务细节可分为七个步骤,下面就从具体的细节来解读Android系统完整的初始化过程。 一、启动BootLoader Android 系统是基于Linux操作系统的,所以它最初的启动过程和Linux一样。当设备通电后首先执行BootLoader引导装载器,BootLoader是在操作系统内核运行之前运行的一段小程序。通过这段小程序初始化硬件设备、建立内存空间映射图,从而将系统的软硬件环境引导进入合适的状态,以便为最终调用操作系统内核准备好正确的运行环境。 而Linux系统启动时: 1)首先要加载BIOS的硬件信息,并获取第一个启动设备的代号 2)读取第一个启动设备的MBR的引导加载程序(lilo、grub等)的启动信息。 3)加载核心操作系统的核心信息,核心开始解压缩,并且尝试驱动所有的硬件设备。 ………… 在嵌入式系统中,通常不会有像BIOS那样的固件程序,因此整个系统的加载任务都是通过BootLoader完成的。 二、加载系统内核 Linux内核映像通常包括两部分代码,分别为实模式代码和保护模式代码。当BootLoader装载内核映像到代码段内存时,分别放置实模式代码和保护模式代码到不同的位置,然后进入实模式代码执行,实模式代码执行完成后转入保护模式代码。 实模式和保护模式的概念再次不做过多解释,读者可以自行查阅资料。 三、启动Init进程 当系统内核加载完成之后,会首先启动Init守护进程,它是内核启动的第一个用户级进程,它的进程号总是1。Init进程启动完成之后,还负责启动其他的一些重要守护进程,包括: Usbd进程(USB Daemon):USB连接后台进程,负责管理USB连接。 adbd 进程(Android Debug Bridge Daemon):ADB连接后台进程,负责管理ADB连接。 debuggerd 进程(Debugger Daemon) :调试器后台进程,负责管理调试请求及调试过程。 rild进程(Radio Interface Layer Daemon):无线接口层后台进程,负责管理无线通信服务。 四、启动Zygote进程 Init进程和一些重要的守护进程启动完成之后,系统启动Zygote 进程。Zygote 进程启动后,首先初始化一个Dalvik VM实例,然后为它加载资源与系统共享库,并开启Socket监听服务,当收到创建Dalvik VM实例请求时,会通过COW(copy on write)技术最大程度地复用自己,生成一个新的Dalvik VM实例。Dalvik VM实例的创建方法基于linux系统的fork原理。