第6卷第1期2010年1月
沈阳工程学院学报(自然科学版)
Journa l of Shenyang I nstit u te of Eng ineeri n g (N atural Science)
Vo l 6N o 1Jan.2010
收稿日期:2009-10-23
作者简介:李丽霞(1979-),女,辽宁灯塔人,讲师,硕士.
滑模变结构控制在直流直线电机中的应用研究
李丽霞,宛 波,田卫华
(沈阳工程学院自动控制工程系,沈阳110136)
摘 要:针对直流直线电机定位问题,推导了直流直线电机的数学模型,建立了直流直线电机定位控制系统,并将滑模变结构控制应用于直流直线电机的控制中,在此基础上对其进行仿真并加以分析.从MA TLAB 仿真曲线上,可以很清楚地看到使用滑动模态的控制器具有响应速度快的优点.关键词:直流直线电机;滑模变结构控制;定位控制中图分类号:TM 359 文献标识码:
A 文章编号:1673-1603(2010)01-0035-03
直流直线电动机广泛地应用于航天、工业检测、自动化控制、信息系统、民用及其他各技术领域.在这些领域中,它可用作电子计算机外围设备、自动化仪器仪表、精密直线位移的机械手及机器人中用作增量运动
的执行元件.尤其是近些年来在机床进给系统中的应用,使用直流直线电动机的系统比使用其他电机的系统跟踪精度提高了一个数量级.
1 直流直线电机的数学模型
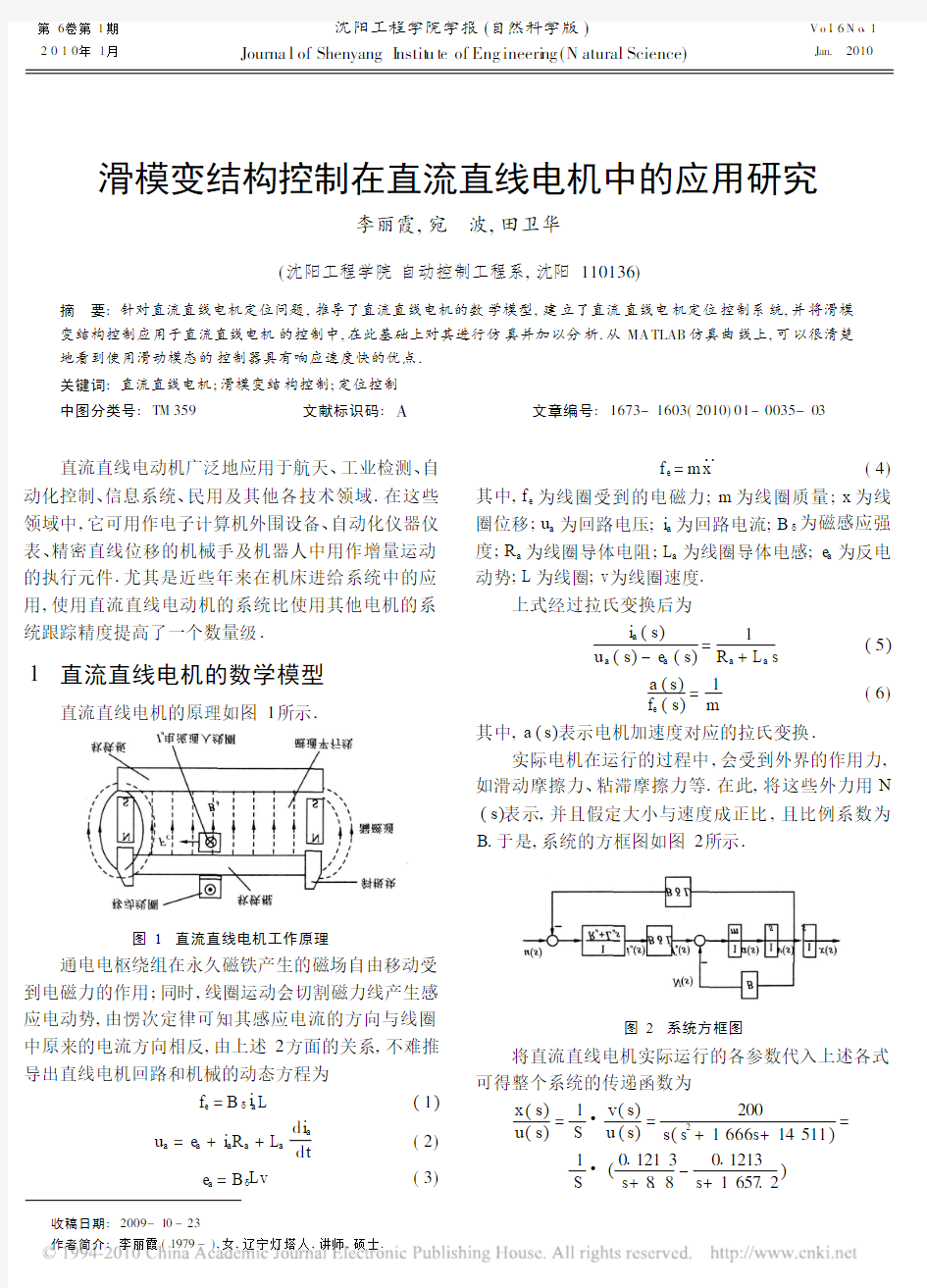
直流直线电机的原理如图1所示.
图1 直流直线电机工作原理
通电电枢绕组在永久磁铁产生的磁场自由移动受到电磁力的作用;同时,线圈运动会切割磁力线产生感
应电动势,由愣次定律可知其感应电流的方向与线圈中原来的电流方向相反,由上述2方面的关系,不难推导出直线电机回路和机械的动态方程为
f e =B i a L (1)
u a =e a +i a R a +L a
d i a
d t
(2)e a =B Lv
(3)
f e =m
x (4)
其中,f e 为线圈受到的电磁力;m 为线圈质量;x 为线圈位移;u a 为回路电压;i a 为回路电流;B 为磁感应强度;R a 为线圈导体电阻;L a 为线圈导体电感;e a 为反电动势;L 为线圈;v 为线圈速度.
上式经过拉氏变换后为
i a (s)u a (s)-e a (s)=
1
R a +L a s
(5)a (s)f e (s)=1m
(6)
其中,a (s)表示电机加速度对应的拉氏变换.
实际电机在运行的过程中,会受到外界的作用力,如滑动摩擦力、粘滞摩擦力等.在此,将这些外力用N (s)表示,并且假定大小与速度成正比,且比例系数为B .于是,系统的方框图如图2所示.
图2 系统方框图
将直流直线电机实际运行的各参数代入上述各式可得整个系统的传递函数为
x (s)u(s)=1S v(s)u (s)=200
s(s 2
+1666s +14511)
=1S (0 1213s +8.8-0 1213s +1657.2
)
36
沈阳工程学院学报(自然科学版)第6卷
由于1657 2 8 8,显然在
v(s)
u(s)
的主导极点为-8 8,为简化后面的推导,忽略第二项,则此系统变为1个二阶的系统
x (s)u (s)=
0 1213
s(s +8.8)
(7)
2 滑模变结构控制器设计
变结构控制器如图3所示
.
图3 滑模变结构控制系统
其中,R (x )为期望的位置;P 为实际测量的位置;U 为电压;X 1为期望值与实际值的误差;n(t)为外界干扰.
考虑电压与位置间的传递函数
P U -n =K (t)
s 2
+As +B
(8)
K (U -n )= P +A P +BP (9)
令X 1为位置误差,X 1=R -P,P =R -X 1,则由式(9)得K (U -n )= R - X 1+A ( R - X 1)+BR -BX = R +A R +BR - X 1-A X 1-BX .令X 2= X 1,则 X 2= X 1= R +A R +BR -A X 1-B X 1-KU +K n = R +A R +BR -BX 1-AX 2-K (U -n).
X 1=X 2
X 2= R +A R +BR -BX 1-AX 2
-K (K -n )(10)
设定顺滑曲面的切换函数为S =C X 1+ X 1=CX 1+X 2,其中C >0
(11)
S =C X 1+ X 2=C X 1+[ R +A R +BR -B X 1-AX 2-K (U -n )]=C X 2+[ R +A R +BR -BX 1-AX 2-K (U -n )]
根据前面的推导S S <0.
S S =C X 2S +[ R +A R +BR ]S -BX 1S -AX 2S -K (U -n )S (12)由(12)式可以看出,影响系统稳定性的因素为状态变量X 1、X 2与S 的乘积及控制量U .因此选择控制器如下:
U = 1H 1X 1+ 2H 2X 2+d sgn (S )(13)其中, 1和 2为状态变量的回馈参数;d 为正数;H 1、
H 2与sgn(S )
H 2=
1
X 1S >0-1X 2S <0
sgn (S )=
1
S >0
-1S <0
将式(13)代入式(12)
S S =C X 2S +[ R +A R +BR ]S -BX 1S -AX 2S -K ( 1H 1X 1+ 2H 2X 2+dg sgn (S )-n )S =(C -A -K 2H 2)SX 2-(B +K 1H 1)X 1S -K dg sgn (S ) S +[ R +A R +BR ]S +K nS =(C -A -K 2H 2)X 2S -(B +K 1H 1)X 1S +[ R +A R +BR +K n -Kdg sgn (S )]S
(14)
由前面推导出的转换条件S S <0,可以判断出如果要S S <0则必须有以下的条件:
当X 2S >0时,H 2=1
K 2>C -A, 2>
C -A K
(15)
当X 2S <0时,H 2=-1
K 2>A -C, 2>
A -C K
(16)
当X 1S >0时,H 1=1
B +K 1>0, 1>
-B K
(17)
当X 1S 时,H 1=-1
B -K 1<0, 1>
B
K
(18)
[ R +A R +BR +K n -Kdg sgn (S )]S <0
化简Kd sgn (S ) S >[ R +A R +BR +K n ]S sgn
(S ) S =|S |,所以
d >
[ R +A R +BR +K n]S
K |S |
(19)
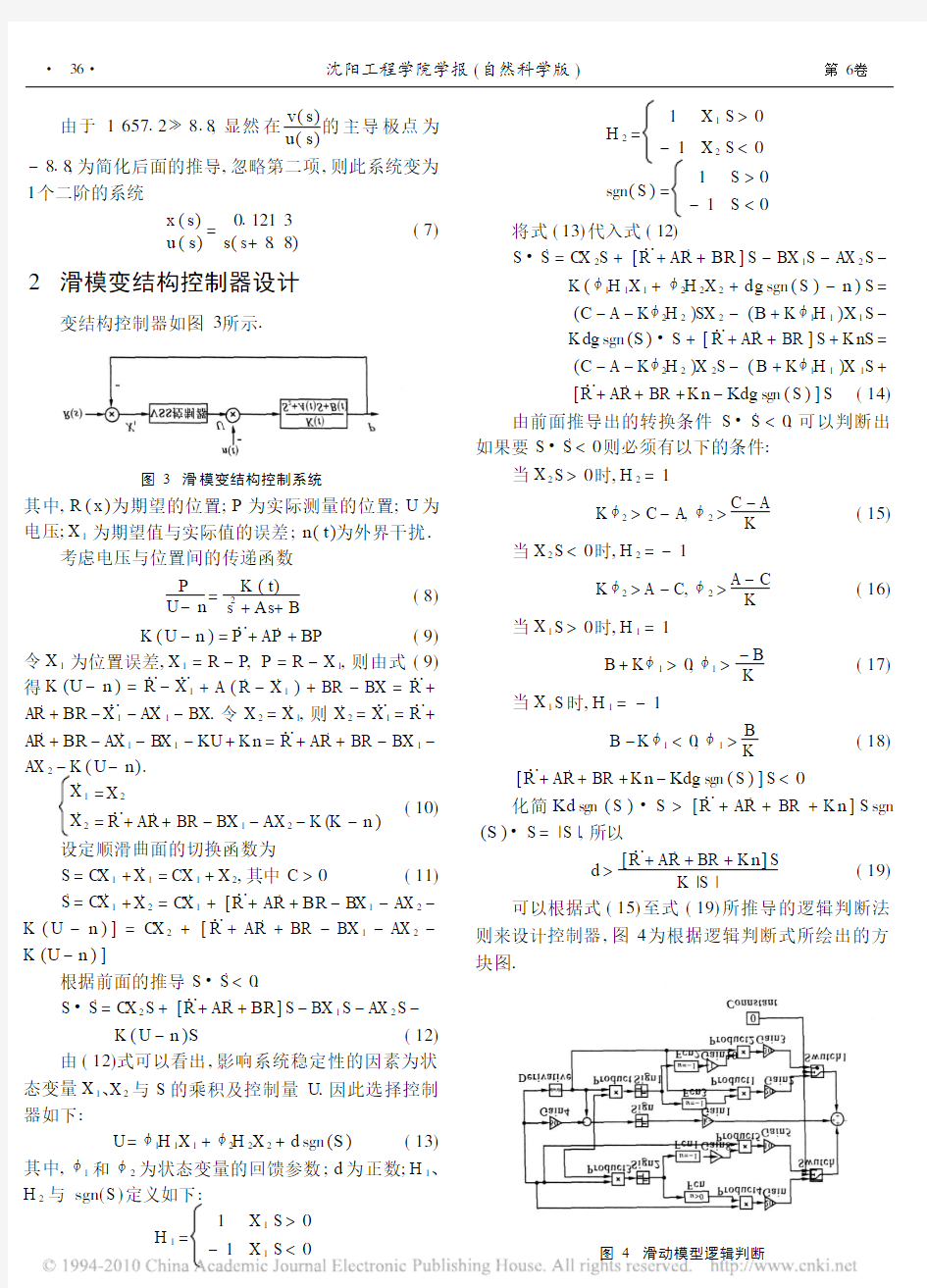
可以根据式(15)至式(19)所推导的逻辑判断法
则来设计控制器,图4为根据逻辑判断式所绘出的方块图.
图4 滑动模型逻辑判断
第1期
李丽霞,等:滑模变结构控制在直流直线电机中的应用研究 37
3 控制系统仿真
由式(7),电机的传递函数为以下形式,并用G (s)表示,具体为G (s)=0.1213s 2
+8.8s .以此为基础,考虑输入为阶跃函数时输出的波形情况及轨迹追踪能力.具体
分2部分,首先d =30时,讨论输出;其次,d =300时,讨论输出.
系统没有干扰,输入为阶跃函数且d =30时,仿真结果见图5.图6为参数d =300时的阶跃响应
.
4 结 论
从MATLAB 仿真曲线上,可以很清楚地看到使用滑动模态的控制器具有响应速度快的优点,并且所设
控制器中参数d 取值不同,响应速度不同.参考文献
[1]雷进波,胡旭晓,李家赓.最优控制策略在直流直线电机
中的应用研究[J].组合机床与自动化加工技术,2003(9).
[2]叶云岳.直线电机原理与应用[M ].北京:机械工业出版
社,2002.
[3]李酞黔.直接驱动直线交流伺服电动机[J].微电机,1998
(3).
[4]Car icch iF,G iulii Cappon i F,Cresc i m b i n i F ,e t a.l S i nuso i da l
brushless dr i ve w ith l ow cost li nea r H a ll eff ec t positi on sen sors[C].Proc IEEE PESC Con,f 2001:799-804.
[5]范海民,夏西平,库才发,等.一种直流永磁圆筒型直线伺
服电机系统[J].洛阳工学院学报,2002,22(l):43-46.[6]丁志刚,蒋黔麟,陶志鹏,等.微特直线电机及其控制
[M ].杭州:浙江大学出版社,1987.
[7]梁得亮,鲁军勇,丰向阳.永磁直线无刷直流电动机的建
模与仿真[J].西安交通大学学报,2004,38(2):186-189.[8]Kuehn l w M R,Peeken H,T roeder Ceta.l The T oro ida l D ri ve
[J].M echan i ca l Eng i neer i ng ,1981,103(2):32-39.
[9]陈志华,李圣怡,杨舜洲.直线电机直接驱动的伺服刀架
控制器的研究[J].控制理论与应用,2002,19(1):89-94.
[10]江思敏,王先逵,吴 丹,等.凸轮数控车削系统关键技术
的研究[J].机械工程学报,2003,39(12):135-139.
[11]范大鹏,尹自强,郑子文.直线电机在精密加工中的应用
[J].制造技术与机床,1997(5):33-35.[12]Chung S K,L ee J .R obust speed on tro ll o f brush l ess d irect
dri v eM o tor using i n teg ra l variable struc t ure contro l[J].IEE P ro E lectr P o w er Apple ,1995,142(6):362-366.
Study on the application of sli di ng m ode variable struct ure
control t o DC li near m otor
LI Li xi a ,WAN Bo ,T IAN W ei hua
(Depa rt men t o f A utoma tion Eng i n ee ring ,Shenyang i n s tit u t e o f Eng inee ring ,Shenyang 110136,Ch i n a)
Abst ract :In this paper ,the m a t h e m a tica l equation o f linearDC m o to r is pr o po sed firstly ,then the m a t h e m atica lm ode l of DC li n ear m o to r is analy zed .The e stablis hm ent o f DC L inearM o tor Po siti o n C ontro lSy ste m,and sli d i n g m ode con tro l app lied to the contro l o f DC li n ear m o tor ,on t h is ba sis ,si m ulation and ana lysis o f i.t The results presented in t h is
article show tha t th ism ethod has good stab ility and precisi o n.
K ey w ords :DC li n ear m o tor ;variab l e structure con tro ;l po siti o n i n g contr o l
(责任编辑 刘 珂)
关键字:滑模变结构PI 直流伺服电机PID 1引言 滑模变结构控制系统是一类特殊的变结构控制系统。起特殊之处在于,系统的控制不仅有切换,而且该切换特性可以迫使系统的状态在切换面上沿预定的轨迹作小幅度、高频率的趋近运动-滑动模态运动。这种滑动模态可以设计成与系统的参数及扰动无关。这样,滑模变结构控制无须系统在线辨识就具有很好的鲁棒性。滑模变结构控制近年来已被广泛应用于处理一些复杂的线性系统、非线性系统、时变、多变量耦合等确定性和不确定性系统,可使系统获得良好的动态品质[1]。而对于高性能的直流伺服系统,一般要求精度高、无超调、响应速度快且鲁棒性好。根据自动调节原理设计的常规PID、PI等控制器,结构简单,设计方法成熟,也容易实现,但直流伺服系统中的非线性、参数的时变性和外部扰动等都影响系统的控制性能,很难满足高精度伺服系统的要求。滑模变结构控制的滑动模态对加给系统的干扰和系统的各种摄动具有完全自适应性,所以能完全满足高精度伺服系统的控制要求[2,4]。 2滑模变结构控制器设计 直流伺服系统的结构框图如图1所示,虽然在多数情况下常把电机的参数看成常数,但实际当转速在大范围内变化时,电机的参数并非常数,而滑模控制正好对参数的变化不太敏感,故 使用这种控制方式来控制电机具有很大的优越性。
2.3切换函数s的选取2.4控制量u的求取
3仿真与结论
由仿真结果可以看到,显然,当有电机参数大幅摄动时,滑模变结构控制系统能适应系统参数的变化,响应时间很快,很快达到稳态,无超调;而PID产生了大幅度的超调,对于直流伺服电机控制系统而言,超调过大,严重影响加工等过程。
1.基于滑模变结构控制的 二级倒立摆实验仿真研究 滑膜变结构控制器 滑模变结构控制作为一种非线性控制,与常规控制的根本区 别在于控制的不连续性,它利用一种特殊的滑模控制方式, 强迫系统的状态变量沿着人为规定的相轨迹滑到期望点[9]。[9]Keqin Zhang,Kaiyu [9]Zhuang.Sliding mode identifier for parameter uncertain nonlinear dynamic systems with nonlinear input[J].Zhe jiang University (Science),2002:426-430. 因此控制器的设计也分2步完成:第1步是变 结构控制律的设计,使系统由初始状态进入设计的滑动超平 面[4]。第2步是滑动模态域的设计,使系统状态沿超平面向 状态原点运动[8]。 系统中取切换函数:? [1]宋军烈,肖军.倒立摆系统的Lagrange方程建模与模糊控制[J].东 北大学学报(自然科学版).2002,23(4):333-337. [2]张昌凡.滑模变结构控制研究综述[J].株洲工学院学报.2004,18(2): 1~5 [3]张克勤.滑模变结构控制理论及其在倒立摆系统中的应用研究[D]. 浙江大学学报.2003(5) [4]胡阳,王吉芳.二级倒立摆系统的实时稳定控制实验研究[J].计 算机仿真.2009,9 [5]Xiao J,Zhang S,Xu X H.A weighted fuzzy control of double inverted pendulum[A].Proceeding of the Third Asian Control Conference[C].Shanghai, 2000:1604-1607. [6]Inoue Akira,Deng Mingcong.Swing_up controller design for cart_type double inverted pendulum[J].Control Theory&Applicat ions,2004,21(5):709-716. [7]袁性忠,姜新建.基于滑模变结构的倒立摆系统稳定控制[J].控 制理论与应用.2004,21(5):720-723 [8]湛力,孙鹏,陈雯柏.倒立摆系统的自摆起和稳定控制[J].计算 机仿真.2006,23(8):289-92 [9]Keqin Zhang,Kaiyu Zhuang.Sliding mode identifier for parameter uncertain nonlinear dynamic systems with nonlinear input[J].Zhe jiang University (Science),2002:426-430. [10]陈谋,长生.基于非线性控制方法的倒立摆系统控制[J].控制理 论与应用.2004,21(5):684-688 [11]战江洋,侯立刚.基于滑模控制的二级倒立摆稳定控制[J].青岛 科技大学学报(自然科学版).2009,04:365-368
目录 永磁同步电机滑模变结构矢量控制 (1) 1.1 研究背景 (1) 1.2 国内外研究现状 (2) 1.3 系统模型 (2) 1.4 控制方法设计 (4) 1.5 系统仿真 (5) 1.6 结论 (7) 参考文献 (8)
永磁同步电机滑模变结构矢量控制 1.1 研究背景 永磁同步电动机(PMSM)具有结构简单、功率密度高、效率高等优点,在高精度数控机床、机器人等场所得到了广泛应用。永磁同步电机最初是基于异步电动机转差角频率控制提出的,随着永磁电机的应用范围的扩大,其控制方法也被广泛地研究和探索,电力电子技术和微处理器的发展为永磁同步电机的控制提供了物质基础,现在主流的,有代表性的永磁同步电机的控制策略要属矢量控制和直接转矩控制。 矢量控制由德国西门子公司的EBlasschke等首先提出,其主要思想参考直流电机控制方案,基于磁场等效原则,通过矢量变换将定子电流矢量变换为两个在空间上相互垂直的直流量,将永磁同步电机等效为他励直流电机,从而摆脱交流电机非线性、强耦合的特性,简化控制算法,获得与直流电机一般的调速性能。由于其控制策略采用磁场定向的方式,故矢量控制也被称为磁场定向控制。 直接转矩控制理论是Takahashi等人于20世纪80年代提出。是继矢量控制技术之后的新型高性能交流变频调速系统,它以控制转矩为直接目的,将磁链作为被控对象,在定子坐标系下利用离散的两点式调节直接实现磁链计算与转矩控制,简化了控制系统,提高了快速响应能力。由于其对转矩和磁链控制的直接性,这种控制方法被命名为直接转矩控制。1997年,直接转矩控制的方法首次被移植到永磁同步电机中,并获得成功。虽然直接转矩控制策略取得了极大进展,但仍存在着磁链和转矩脉动的问题,故其更广泛的应用仍待深入研究。 目前永磁同步电机控制使用最广泛的还是矢量控制策略,直接转矩控制在感应电机上的应用较为成熟,虽然有学者提出将矢量控制中的MTPA控制、弱磁控制与直接转矩控制结合的电动汽车驱动控制方案,但仍停留在理论,实际应用中仍有问题需要解决。
步骤一:确定状态变量(分为单输入系统和多输入系统)以及状态变量之间的关系 比如永磁同步电机速度滑模变结构控制: 状态变量为: 状态变量之间的关系(可以通过电机的电压,磁链,转矩和运动学方程推导)比如确定如上x1,x2以及系统的关系,可根据如下方程(其中有错误注意): 得到状态关系方程(其中a为常数与电机参数有关): 永磁同步电机位置滑模变结构控制: 状态变量为: 步骤二:确定滑动面方程(切换函数S) 必须确保滑动模态在S = 0时t趋近于无穷大是稳定的。(根据实际情况确保品质参数),其表达式如下:
这种切换函数下得到的响应是过阻尼响应,理论上是不存在超调量的。 对于多输入系统,其切换函数为: 步骤三: 方法一:确定趋近率函数(切换函数的微分S’),并确定滑模变结构控制的输出量即控制率函数Ux(Ux)。另外,需要由电机方程指定该控制率函数和电机系统变量的关系(实际需要决定)(比如:速度滑模变结构的输出肯定是与电机电流iq是有关系的,从而便于下一步的电流逆变器的控制)。 常见的趋近率函数为: 其他特殊的更常用的趋近律如下:
如此可确定控制率函数的表达式。(本质上控制率函数是用来去除系统参数变化和外部扰动对系统的影响。) 该方法的缺点是:由于系统在滑动面上对参数及系统外部扰动的抗干扰性很强。而在滑动面外(趋近运动),控制率函数在起作用,而控制率函数是与系统参数有关的。所以收到系统参数的影响。为了能够实现系统一直具有很高的鲁棒性,可以使系统设置从初始时刻就处于滑动面上,见方法二(全局滑模变结构控制)。 方法二:合适选择切换函数并先确定控制率函数Ux。(由于系统一直处于滑动面上,所以无需选择趋近率函数) 比如PMSM的速度滑模变结构控制:
摘要:本文首先建立了永磁同步电动机的数学模型,深入研究了永磁同步电动机的矢量控制理论,并在此基础上讨论了永磁同步电动机的控制方案。为了获得更好的控制效果,本文采用了空间电压矢量脉宽调制方式,确定了基于id =0的矢量控制方案及其电流反馈控制系统结构,并分析了电流解耦的主要影响因素。最后从滑模变结构理论出发,设计了滑模变结构与PI的组合速度环控制器,克服了常规滑模控制器(VSC)在滑模面附近的高频颤动,提高了稳态精度。随后利用Matlab软件建立了基于滑模变结构的永磁同步电动机矢量控制系统的仿真模型,并在此基础上进行了大量的仿真研究,仿真及实验结果均表明本系统具有良好的动静态特性以及较高的精度,可以满足伺服控制的需要。 关键词:永磁同步电动机;矢量控制;空间电压矢量脉宽调制;系统仿真
The sliding mode variable structure control of permanent magnet synchronous motor Major: automation Student Number: 201010311326 Name: Meng Xianling Tutor:Gou Yilan Abstract:This paper established the mathematical model of permanent magnet synchronous motor, further study the theory of vector control of permanent magnet synchronous motor. In order to obtain better control effect, this paper adopts the space voltage vector pulse width modulation method, decides to use the vector control scheme based on id = 0 and adopts current feedback control system structure, and analyzes the main factors that the current decoupled. Finally, on the basis of the sliding mode variable structure theory, the controller of sliding mode variable structure combined with PI was designed , and overcome high frequency vibration of the conventional sliding mode controller (VSC) near the sliding surface, improve the steady-state accuracy. Then simulation model of permanent magnet synchronous motor vector control system based on the sliding mode variable structure is established by using the Matlab software , and then carries on Extensive simulation studies on the basis of the theory, the simulation and experimental results show that this system has good dynamic and static characteristics and high accuracy,the system can meet the needs of the servo control. Key words: permanent magnet synchronous motor; vector control; the space voltage vector pulse width ;system simulation
滑模变结构控制作为一种特殊的鲁棒控制方法【原理,优点,意义,步骤,特点】 变结构控制系统的特征是具有一套反馈控制律和一个决策规则,该决策规则就是所谓的切换函数,将其作为输入来衡量当前系统的运动状态,并决定在该瞬间系统所应采取的反馈控制律,结果形成了变结构控制系统。该变结构系统由若干个子系统连接而成,每个子系统有其固定的控制结构且仅在特定的区域内起作用。引进这种变结构特性的优势之一是系统具有每一个结构有用的特性,并可进一步使系统具有单独每个结构都没有的新的特性,这种新的特性即是变结构系统的滑动模态。滑动模态的存在,使得系统在滑动模态下不仅保持对系统结构不确定性、参数不确定性以及外界干扰等不确定性因素的鲁棒性,而且可以获得较为满意的动态性能。迄今为止,变结构控制理论已经历了50年的发展历程,形成了自己的体系,成为自动控制系统中一种一般的设计方法。它适用的控制任务有镇定与运动跟踪等。 滑模控制(sliding mode control, SMC)也叫变结构控制,本质上是一类特殊的非线性控制,且非线性表现为控制的不连续性。这种控制策略与其他控制的不同之处在于系统的“结构”并不固定,而是可以在动态过程中,根据系统当前的状态(如偏差及其各阶导数等)有目的地不断变化,迫使系统按照预定“滑动模态”的状态轨迹运动。由于滑动模态可以进行设计且与对象参数及扰动无关,这就使得滑模控制具有快速响应、对应参数变化及扰动不灵敏、无需系统在线辨识、物理实现简单等优点。 原理: 滑模变结构控制的原理,是根据系统所期望的动态特性来设计系统的切换超平面,通过滑动模态控制器使系统状态从超平面之外向切换超平面收束。系统一旦到达切换超平面,控制作用将保证系统沿切换超平面到达系统原点,这一沿切换超平面向原点滑动的过程称为滑模控制。由于系统的特性和参数只取决于设计的切换超平面而与外界干扰没有关系,所以滑模变结构控制具有很强的鲁棒性。所设计的切换超平面需满足达到条件,即系统在滑模平面后将保持在该平面的条件。现在以N维状态空间模型为例,采用极点配置方法得到M(N 第24卷第3期2007年6月 控制理论与应用 Control Theory&Applications V ol.24No.3 Jun.2007滑模变结构控制理论及其算法研究与进展 刘金琨1,孙富春2 (1.北京航空航天大学自动化与电气工程学院,北京100083;2.清华大学智能技术与系统国家重点实验室,北京100084) 摘要:针对近年来滑模变结构控制的发展状况,将滑模变结构控制分为18个研究方向,即滑模控制的消除抖振问题、准滑动模态控制、基于趋近律的滑模控制、离散系统滑模控制、自适应滑模控制、非匹配不确定性系统滑模控制、时滞系统滑模控制、非线性系统滑模控制、Terminal滑模控制、全鲁棒滑模控制、滑模观测器、神经网络滑模控制、模糊滑模控制、动态滑模控制、积分滑模控制和随机系统的滑模控制等.对每个方向的研究状况进行了分析和说明.最后对滑模控制的未来发展作了几点展望. 关键词:滑模控制;鲁棒控制;抖振 中图分类号:TP273文献标识码:A Research and development on theory and algorithms of sliding mode control LIU Jin-kun1,SUN Fu-chun2 (1.School of Automation Science&Electrical Engineering,Beijing University of Aeronautics and Astronautics,Beijing100083,China; 2.State Key Laboratory of Intelligent Technology and Systems,Tsinghua University,Beijing100084,China) Abstract:According to the development of sliding mode control(SMC)in recent years,the SMC domain is character-ized by eighteen directions.These directions are chattering free of SMC,quasi SMC,trending law SMC,discrete SMC, adaptive SMC,SMC for mismatched uncertain systems,SMC for nonlinear systems,time-delay SMC,terminal SMC, global robust SMC,sliding mode observer,neural SMC,fuzzy SMC,dynamic SMC,integral SMC and SMC for stochastic systems,etc.The evolution of each direction is introduced and analyzed.Finally,further research directions are discussed in detail. Key words:sliding mode control;robust control;chattering 文章编号:1000?8152(2007)03?0407?12 1引言(Introduction) 滑模变结构控制本质上是一类特殊的非线性控制,其非线性表现为控制的不连续性,这种控制策略与其它控制的不同之处在于系统的“结构”并不固定,而是可以在动态过程中根据系统当前的状态(如偏差及其各阶导数等)有目的地不断变化,迫使系统按照预定“滑动模态”的状态轨迹运动.由于滑动模态可以进行设计且与对象参数及扰动无关,这就使得变结构控制具有快速响应、对参数变化及扰动不灵敏、无需系统在线辩识,物理实现简单等优点.该方法的缺点在于当状态轨迹到达滑模面后,难于严格地沿着滑模面向着平衡点滑动,而是在滑模面两侧来回穿越,从而产生颤动. 滑模变结构控制出现于20世纪50年代,经历了50余年的发展,已形成了一个相对独立的研究分支,成为自动控制系统的一种一般的设计方法.以滑模为基础的变结构控制系统理论经历了3个发展阶段.第1阶段为以误差及其导数为状态变量研究单输入单输出线性对象的变结构控制;20世纪60年代末开始了变结构控制理论研究的第2阶段,研究的对象扩大到多输入多输出系统和非线性系统;进入80年代以来,随着计算机、大功率电子切换器件、机器人及电机等技术的迅速发展,变结构控制的理论和应用研究开始进入了一个新的阶段,所研究的对象已涉及到离散系统、分布参数系统、滞后系统、非线性大系统及非完整力学系统等众多复杂系统,同时,自适应控制、神经网络、模糊控制及遗传算法等先进方法也被应用于滑模变结构控制系统的设计中. 2滑模变结构控制理论研究进展(Develop-ment for SMC) 2.1消除滑模变结构控制抖振的方法研 究(Research on chattering elimination of SMC) 2.1.1滑模变结构控制的抖振问题(Problems of SMC chattering) 从理论角度,在一定意义上,由于滑动模态可以 收稿日期:2005?10?19;收修改稿日期:2006?02?23. 基金项目:国家自然科学基金资助项目(60474025,90405017). 滑模变结构控制 【原理,优点,意义,步骤,特点】 变结构控制系统的特征是具有一套反馈控制律和一个决策规则,该决策规则就是所谓的切换函数,将其作为输入来衡量当前系统的运动状态,并决定在该瞬间系统所应采取的反馈控制律,结果形成了变结构控制系统。该变结构系统由若干个子系统连接而成,每个子系统有其固定的控制结构且仅在特定的区域内起作用。引进这种变结构特性的优势之一是系统具有每一个结构有用的特性,并可进一步使系统具有单独每个结构都没有的新的特性,这种新的特性即是变结构系统的滑动模态。滑动模态的存在,使得系统在滑动模态下不仅保持对系统结构不确定性、参数不确定性以及外界干扰等不确定性因素的鲁棒性,而且可以获得较为满意的动态性能。迄今为止,变结构控制理论已经历了50年的发展历程,形成了自己的体系,成为自动控制系统中一种一般的设计方法。它适用的控制任务有镇定与运动跟踪等。滑模控制(sliding mode control, SMC)也叫变结构控制,本质上是一类特殊的非线性控制,且非线性表现为控制的不连续性。这种控制策略与其他控制的不同之处在于系统的“结构”并不固定,而是可以在动态过程中,根据系统当前的状态(如偏差及其各阶导数等)有目的地不断变化,迫使系统按照预定“滑动模态”的状态轨迹运动。由于滑动模态可以进行设计且与对象参数及扰动无关,这就使 得滑模控制具有快速响应、对应参数变化及扰动不灵敏、无需系统在线辨识、物理实现简单等优点。原理:滑模变结构控制的原理,是根据系统所期望的动态特性来设计系统的切换超平面,通过滑动模态控制器使系统状态从超平面之外向切换超平面收束。系统一旦到达切换超平面,控制作用将保证系统沿切换超平面到达系统原点,这一沿切换超平面向原点滑动的过程称为滑模控制。由于系统的特性和参数只取决于设计的切换超平面而与外界干扰没有关系,所以滑模变结构控制具有很强的鲁棒性。所设计的切换超平面需满足达到条件,即系统在滑模平面后将保持在该平面的条件。现在以N维状态空间模型为例,采用极点配置方法得到M(N 滑模变结构理论 一、引言 滑模变结构控制本质上是一类特殊的非线性控制,其非线性表现为控制的不连续性,这种控制策略与其它控制的不同之处在于系统的“结 构”并不固定,而是可以在动态过程中根据系统当前的状态(如偏差及其 各阶导数等)有目的地不断变化,迫使系统按照预定“滑动模态”的状态 轨迹运动。由于滑动模态可以进行设计且与对象参数及扰动无关,这就使 得变结构控制具有快速响应、对参数变化及扰动不灵敏、无需系统在线 辩识,物理实现简单等优点。该方法的缺点在于当状态轨迹到达滑模面后,难于严格地沿着滑模面向着平衡点滑动,而是在滑模面两侧来回穿越, 从而产生颤动。滑模变结构控制出现于20世纪50年代,经历了 50余年 的发展,已形成了一个相对独立的研究分支,成为自动控制系统的一种一 般的设计方法。以滑模为基础的变结构控制系统理论经历了 3个发展阶 段.第1阶段为以误差及其导数为状态变量研究单输入单输出线性对象的 变结构控制; 20世纪60年代末开始了变结构控制理论研究的第2阶段, 研究的对象扩大到多输入多输出系统和非线性系统;进入80年代以来, 随着计算机、大功率电子切换器件、机器人及电机等技术的迅速发展, 变 结构控制的理论和应用研究开始进入了一个新的阶段, 所研究的对象已 涉及到离散系统、分布参数系统、滞后系统、非线性大系统及非完整力 学系统等众多复杂系统, 同时,自适应控制、神经网络、模糊控制及遗传 算法等先进方法也被应用于滑模变结构控制系统的设计中。 二、基本原理 带有滑动模态的变结构控制叫做滑模变结构控制(滑模控制)。所谓滑动模态是指系统的状态被限制在某一子流形上运动。通常情况下,系统 的初始状态未必在该子流形上,变结构控制器的作用在于将系统的状态 轨迹于有限时间内趋使到并维持在该子流形上,这个过程称为可达性。系 统的状态轨迹在滑动模态上运动并最终趋于原点,这个过程称为滑模运 动。滑模运动的优点在于,系统对不确定参数和匹配干扰完全不敏感。下 图简要地描述了滑模变结构控制系统的运动过程,其中S(t)为构造的切 换函数(滑模函数), S(t)=0为滑模面。滑模变结构控制理论及其算法研究与进展_刘金琨
滑模变结构控制
滑模控制
相关主题
文本预览