一、工作原理
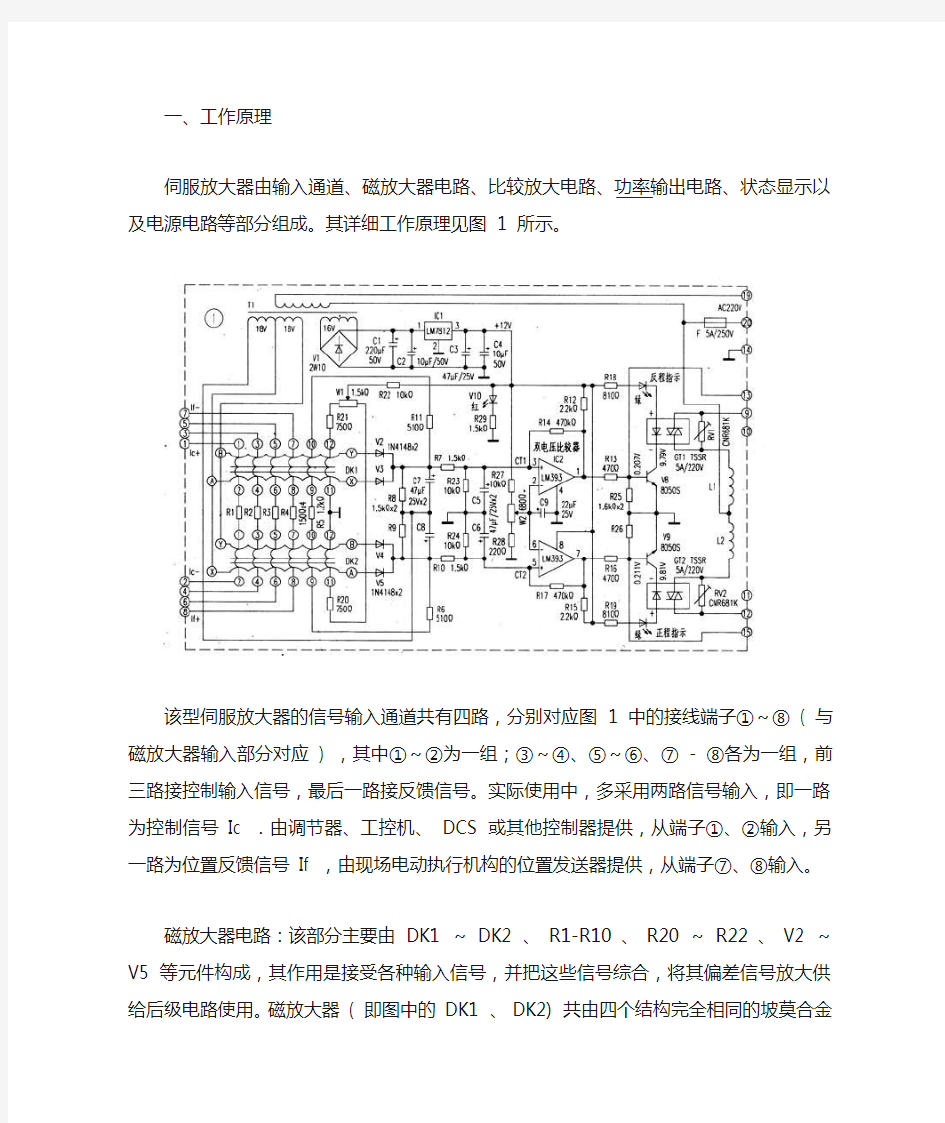
伺服放大器由输入通道、磁放大器电路、比较放大电路、功率输出电路、状态显示以及电源电路等部分组成。其详细工作原理见图 1 所示。
该型伺服放大器的信号输入通道共有四路,分别对应图 1 中的接线端子①~⑧ ( 与磁放大器输入部分对应 ) ,其中①~②为一组;③~④、⑤~⑥、⑦ - ⑧各为一组,前三路接控制输入信号,最后一路接反馈信号。实际使用中,多采用两路信号输入,即一路为控制信号 Ic .由调节器、工控机、 DCS 或其他控制器提供,从端子①、②输入,另一路为位置反馈信号 If ,由现场电动执行机构的位置发送器提供,从端子⑦、⑧输入。
磁放大器电路:该部分主要由 DK1 ~ DK2 、 R1-R10 、 R20 ~ R22 、 V2 ~ V5 等元件构成,其作用是接受各种输入信号,并把这些信号综合,将其偏差信号放大供给后级电路使用。磁放大器 ( 即图中的 DK1 、 DK2) 共由四个结构完全相同的坡莫合金环构或。以 DK1 为例,由两个磁环构成,每个磁环上绕有一组交流激励绕组 ( 即 A-X 与 B-Y) ,把两个磁环粘在一起,绕上四组输入绕组 ( 即① - ②、③ - ④、⑤ - ⑥、⑦ - ⑧ ) 、反馈绕组 ( 即⑩ - ⑨ ) 和偏移绕组 ( 即 12-11) ,构成单臂磁放大器。
由图可见,每个单臂磁放大器上所绕线圈多达 8 组。两个单臂放大器组成推挽式磁放大器。交流激励绕组所加的激励电压是由变压器 T1 次级提供的双 18V 交流电压,激励绕组的另一端分别接有二极管 V2-V3 及 V4 ~ V5 。电阻 R8 和 R9 的直流电压之差,即为磁放大器的输出。信号输入绕组分别接有 R1 ~ R4 ,以便把各绕组的内阻都统调到 150 Ω,以利于阻抗平衡。偏移绕组由 +12V 经 R22 、 W1 、 R 2l ( 或 R20) 供给直流信号,使其产生恒定直流磁场。调整 W1 可以改变偏移电流大小,也就是调整磁放大器的零点,改变 R22 可以调整磁放大器的工作点。 R11 、 R6 是磁放大器输出的反馈电阻。从磁放大器的输出端取出部分电压,接到反馈绕组构成磁放大器的负反馈。磁放大器是利用直流电流来改变导磁体的导磁棒,使交流绕组的电感量发生变化,从而控制交流绕组中电流值。改变 R11 、 R6 可以调整磁放大器的输出为零。而当控制绕组中有输入信号时,由于此直流电流在两个单臂绕组中的流动方向相反,使其中一组磁环的导磁率及电感量减小,激励
绕组电流增大;但是另一激动绕组电流减小。因此在电阻 R8 和 R9 的压降不相等,磁放大器有电压输出,实现了用磁放大器的输出电压反映输入电流的变化。磁放大器共 3 个控制绕组 ( 即输入、反馈和偏移绕组 ) ,它们的输入信号通过磁环中产生的磁通来叠加,可以相互隔离。磁放大器的放大倍数主要取决于磁环的导磁系数和控制绕组的匝数。当输入信号的代数和为± 150 μ A 时,推挽式磁放大器的输出电压约为± 1V 。
比较放大电路主要由双电压比较器 LM393 及其外围元件构成。 LM393 内部由两个偏移电压指标低达 2 .0 μ的独立精密电压比较器构成。该 IC 采用单电源设计,适用电压范围广。且可直接与 TTL 及 CMOS 逻辑电路接口。只要同相输入端的电压比反向输入端的电压高,其输出端就会输出高电平;反之则输出低电平。需要注意的是在实际使用电路中要在其输出端 ( 即①、⑦脚 ) 加上上拉电阻,也就是将一个大约几百欧到几千欧的电阻从输出端接到电源正端,如图 1 中的 R12 及 R15 。
该部分的工作过程如下: +12V 电压经 R27 、 W2 、 R28 分压后从 W2 的中心抽头取出约 0 . 678V 的电压加至 IC2 的反相输入端②、⑥脚,作为基准电压。当输入信号Ic-If>0( 且超过死区 ) 时,此时 IC2 之⑤脚同相输入端电压由 0 增大至超过⑥脚的0 . 678V ,则 V ⑤ >V ⑥,⑦脚输出端由静态的 0 . 258V 跃变为 2 . 7V ,通过 R16 加至正相驱动管 V9 的基极;当 Ic - If<0( 且超过死区 ) 时, IC2 之③脚同相输入端电压由 0 增大至超过②脚的 0 . 678V ,则 V ③ >V ②,①脚输出端由静态的 0 . 258V 同样跃变为 2 . 7V ,通过 R13 加至反相驱动管 V8 的基极;而当 Ic-if=0( 或不超过死区 ) 时,比较器无输出动作。 C5-C8 的作用是对前级输入信号进行滤波。 IC2(LM393) 的管脚功能定义及在路实测数据参见附表所示,可供检修时参考。
功率输出电路主要由驱动三极管 V8 和 V9 、固态继电器 GT1 和 GT2 、过压保护器件 RV1 与 RV2 以及电感线圈 L1 与 L2 组成。伺服放大器的输出通道有两路,可分别控制伺服电动机正、反转。当 Ic-If>O( 且超过死区 ) 时,伺服放大器有正向输出,此时 V9 的基极为高电平, V9 饱和导通,固态继电器 GT2 导通,则 AC220V 通过 L2 、 GT2 、接线端子 12(11 与 12 短接 ) 加至负载 ( 伺服电机 ) 上,使电机正转;反之当Ic-If<0( 且超过死区 ) 时,伺服放大器有反向输出,此时 V8 的基极为高电平,饱和导通,固态继电器 GT1 导通, A( 220V 通过 L1 、 GT1 、接线端子⑨ ( ⑨与⑩短接 ) 加至负载 ( 伺服电机 ) 上,电机反转。浪涌保护器件 RV 的作用有两个:一是防止由固态继电器输出的交流电压过高而损坏负载;二是防止当固态继电器截止时负载(电机)产生的反电动势损坏固态继电器。电感线圈 L1 与 L2 作用是抑制伺服电机分相电容的放电速度,以保护固态继电器。
状态显示电路主要由 V10 、 V6 、 V7 构成,其中 V10 (红色发光管)用以指示电源部分是否正常; V6 (绿色发光管)是反程指示,当 V8 导通且 GT1 正常时, V6 发光,
反之则熄灭; V7 则是正程指示,即当 V9 导通且 GT2 正常时, V7 发光,反之则熄灭。
电源电路部分比较简单,不再赘述。伺服放大器的尾部端子接线定义参见图 2 所示,该图中 1 ~ 20 与图 1 中的 1 ~ 20 一一对应。
二、伺服放大器的模拟调校
伺服放大器在接入系统使用前,一般应进行模拟调试,调试接线方法见图 3 所示。其步骤如下:
1 .调零 ( 即调平衡 )
分别调整 Ic 和 If ,使两输入信号相等 ( 推荐在输入信号量程的 20 %一 50 %点调平衡 ) ;用数字万用表监测 CT1 、 CT2 测点上的电压 ( 即前置级的输出电压 ) ,调
整调零电位器 W1 ,使该电压值为数毫伏即可。
2 .调死区
保持调零时的 If 不变,改变 Ic ,使 Ic 增加 ( 或减少 )0 . 15 — 0 . 2mA 。
调整调死区电位器 W2 .至 L1 或 L2 刚好亮 ( 若 Ic 是增加的,则 L1 亮,若 Ic 是减少的,则 L2 亮 ) ;改变 Ic , L1 、 L2 应交替亮 ( 但不应有同时亮现象 ) 。
经以上模拟调试,如无异常情况,可将伺服放大器接入系统使用。
三、伺服放大器检修一般程序
笔者根据实际检修经验画出伺服放大器的一般检修程序流程图,见图 4 所示,供参考。
伺服故障报警及处理方法 电压过低电源电压太低。MR-E-□A:160V 以下 存储器异常1 RAM存储器异常 时钟异常印刷电路板的异常 存储器异常2 EEP-ROM异常 编码器异常1 编码器和伺服放大器之间通讯异常。 电路板异常2 CPU·零部件异常 存储器异 电机配合异常伺服放大器和伺服电机之间的配合有误。 编码器异常2 编码器和伺服放大器之间通讯异常。 主电路异常伺服放大器的伺服电机输出端(U·V·W相)接地故障。 再生制动异常制动电流超过内置再生制动电阻或再生制动选件的允许值。再生制动晶体管异常 超速转速超出了瞬时允许转速。 过流伺服放大器的输出电流超过了允许电流。 过压直流母线电压的输入在400V以上。 指令脉冲频率异常输入的指令脉冲的脉冲频率太高。 参数异常参数的设定值异常。 主电路芯子过热主电路异常过热。 伺服电机过热伺服电机的温度上升,热保护继电器动作。 过载 1 超过了伺服放大器的过载能力。负载率300%:以上负载率200%:100s以上 过载2 由于机械故障导致伺服放大器连续数秒钟以最大输出电流输出。伺服电机 的锁定时间:1s以上 误差过大偏差计数器的滞留脉冲超过编码器的分辨率×10[pulse]。
串行通讯超时RS-232C通讯的时间超过参数的设定值。 串行通讯异常伺服放大器和通讯设备(计算机等)之间出现串行通讯错误。CPU·部件异常 再生制动电流过大警告 可能会超出内置再生制动电阻或外部再生制动选件的制动 能力。 过载警告可能发生过载1,过载2报警。 伺服紧急停止警告EMG-SG之间断开。 主电路OFF警告 主电路电源断开时,伺服开启信号(SON)为ON。 伺服报警代码及处理 欠压 电源电压过低。MR-E-□A:160V 以下 <主要原因><处理方法>·电源电压太低。→检查电源系统 ·控制电源瞬间停电在60ms以上。→检查电源系统·由于电源容量过小,导致启动时电源电压下降。→检查电源系统·电源切断5秒以内在接通。→检查电源系统·伺服放大器内部故障。→更换伺服放大器存储器异常1、 时钟异常、 存储器异常2 AL.12:RAM异常 AL.13:印刷电路板异常 AL.15:EEPROM异常 <主要原因><处理方法> ·伺服放大器内部故障。→更换伺服放大器。
永磁同步电机驱动器用户手册 THSR-A/B系列
永磁同步电机驱动器用户手册 -I-目录 一.安装 (1) 1.装时注意事项 (1) 2.环境条件 (1) 二.产品型号对照 (2) 1.伺服驱动器铭牌说明 (2) 2.驱动器型号说明 (2) 三.驱动器外观及面板说明 (3) 四.伺服驱动器尺寸图 (6) 五.伺服电机尺寸图 (8) 六.伺服驱动器与伺服电机搭配对照表 (10) 七.驱动器使用电线规格 (11) 八.控制信号标准接线图 (12) 九.驱动器端子说明 (14) 十.伺服驱动器信号输入输出回路图 (17) 十一.驱动器接线方式 (18) 1.绣花机主轴 (19) 2.绣花机移框 (20) 3.绣花机D轴 (21) 4.绣花机H轴 (22) 十二.参数表 (23) 十三.驱动器异常报警 (24) 附录:主轴/移框参数快速设置 (26) 主轴参数快速设置 (26) 移框参数快速设置 (26)
永磁同步电机驱动器用户手册一. 安装 1.装时注意事项 1)驱动器与电机连线勿拉紧;电源线与控制信号线分开走线,有 30cm的间距,这样可以减小电源对信号线的干扰; 2)接线时,禁止将三相电源接至U、V、W端子上; 3)确保接地良好; 4)电机轴心必须与设备轴心对心良好; 5)通电时,请勿拆卸驱动器、电机、或更改配线; 6)通电运行时,请勿接触散热片,以免烫伤 2.环境条件 本产品驱动器使用环境温度为0°C ~ 50°C。若环境温度超过45°C 以上时,请置于条件通风良好的场所。长时间的运转建议在45°C 以下的环境温度,以确保产品的可靠性能。如果本产品装在配电箱里,那配电箱的大小及通风条件必须让所有内部使用的电子装置没有过热的危险。而且也要注意机器的震动是否会影响配电箱的电子装置。除此之外,使用的条件也包括: ▲无发高热装置的场所; ▲无水滴、蒸气、灰尘及油性灰尘的场所; ▲无腐蚀、易燃性的气、液体的场所; ▲无漂浮性的尘埃及金属微粒的场所; ▲坚固无振动的场所; ▲无电磁噪声干扰的场所。 第1页
第一章概述 1.1 产品简介: 交流伺服技术自九十年代初发展至今,技术日臻成熟,性能不断提高,现已广泛应用于数控机床、印刷馐机械、纺织机械、自动化生产线等自动化领域。 DDA98交流伺服系统系国产第一代全数字交流伺服系统,采用国际最新数字信号处理DSP)、大规模可编程门阵列(CPLD)和MISUBISHI智能化功率模块(IPM),集成度高、体积小、保护完善、可靠性好、彩最何必PID算法完成PWM控制,性能已达到国外同类产品的水平。 与步进系统相比,DA98交流伺服系统具有以下优点 ●避免失步现象 伺服电机自带编码器,位置信号反馈至伺服 驱动器,与开环位置控制器一起构成半闭环 控制系统。 ●宽速比、恒转矩 调速比为1:5000,从低速到高速都具有稳 定的转矩特性。 ●高速度、高精度 伺服电机最高转速可达3000rpm,回转定位 精度1/10000r。 〖注〗不同型号伺服电机最高转速不同。 ●控制简单、灵活 通过修改参数可对伺服系统的工作方式、运 行特性作出适当的设置,以适应不同的要求。
1.2 到货检查 1)收货后,必须进行以下检查: (1) 包装箱是否完好,货物是否因运输受损? (2) 核对伺服驱动器和伺服电机铭牌,收到货物是否确系所订货物? (3) 核对装箱单,附件是否齐全? 2)型号意义: (1) 伺服驱动器型号 (示出华中理工大学电机厂STZ 系列) ※1 (04、06……23)对应0.4~2.3KW ※2 ※1:可选配其它国产、进口伺服电机,需订货。驱动器缺省参数仅适配STZ 系列伺服电机, 选配其它伺服电机时,出厂参数已备份在EEPROM 区。恢复出厂参数时应执行恢复备份,不可执行恢复缺省参数操作。 ※2:中小功率(小于等于1.5KW )为标准配置,中功率(大于1.5KW 、小于等于2.3KW )采用 加厚散热器。 〖注〗产品出厂时,上面填写框已按产品型号填写好,请用户与产品铭牌核对。 (2) 伺服电机型号 DA98交流伺服驱动器可与国内外多款伺服电机配套,由用户订货时选择。本手册按华中电机厂生产的伺服电机进行描述,其它型号伺服电机有关资料随伺服电机提供。 光电编码器反馈 电机工作电压H :300V L :200V 额定转速级别 1:低速(1500/2000rpm ) 2:高速(2500/3000rpm ) 零速转矩2、4、5、6、7.5、10…N.m 正弦波驱动伺服电机 电机外径 110:110×110mm 130:130×130mm
第一章 概述 1.1 产品简介: 交流伺服技术自九十年代初发展至今,技术日臻成熟,性能不断提高,现已广泛应用于数控机床、印刷馐机械、纺织机械、自动化生产线等自动化领域。 DDA98交流伺服系统系国产第一代全数字交流伺服系统,采用国际最新数字信号处理DSP )、大规模可编程门阵列(CPLD )和MISUBISHI 智能化功率模块(IPM ),集成度高、体积小、保护完善、可靠性好、彩最何必PID 算法完成PWM 控制,性能已达到国外同类产品的水平。 与步进系统相比,DA98交流伺服系统具有以下优点 ● 避免失步现象 伺服电机自带编码器,位置信号反馈至伺服 驱动器,与开环位置控制器一起构成半闭环 控制系统。 ● 宽速比、恒转矩 调速比为1:5000,从低速到高速都具有稳 定的转矩特性。 ● 高速度、高精度 伺服电机最高转速可达3000rpm , 回转定位 精度1/10000r 。 〖注〗不同型号伺服电机最高转速不同。 ● 控制简单、灵活 通过修改参数可对伺服系统的工作方式、运 行特性作出适当的设置,以适应不同的要求。 1.2 到货检查 1)收货后,必须进行以下检查: (1) 包装箱是否完好,货物是否因运输受损? (2) 核对伺服驱动器和伺服电机铭牌,收到货物是否确系所订货物? (3) 核对装箱单,附件是否齐全? 2)型号意义: (1) 伺服驱动器型号 DA98
适配伺服电机型号(示出华中理工大学电机厂STZ 系列) ※1 输出功率:两位数字(04、06……23)对应0.4~2.3KW ※2 系列代号 ※1:可选配其它国产、进口伺服电机,需订货。驱动器缺省参数仅适配STZ 系列伺服电机, 选配其它伺服电机时,出厂参数已备份在EEPROM 区。恢复出厂参数时应执行恢复备份,不可执行恢复缺省参数操作。 ※2:中小功率(小于等于1.5KW )为标准配置,中功率(大于1.5KW 、小于等于2.3KW )采用加 厚散热器。 〖注〗产品出厂时,上面填写框已按产品型号填写好,请用户与产品铭牌核对。 (2) 伺服电机型号 DA98交流伺服驱动器可与国内外多款伺服电机配套,由用户订货时选择。本手册按华中电机厂生产的伺服电机进行描述,其它型号伺服电机有关资料随伺服电机提供。 STZ —— HM 3(1DA98伺服驱动器标准附件安装使用手册(本书)1本 安装支架2个 ×8沉头螺钉 4个 插头(DB25孔) 1套 (注1) 插头(DB25针) 1套 (注2) 〖注1〗 配套我厂位置控制器时,与信号电缆(3)米配套提供。 〖注2〗 我厂提供伺服电机时,用户可选择反馈电缆(3米)配套提供。 (2)伺服电机标准附件按伺服电机说明书提供 1.3 产品外观 1) 伺服驱动器外观 2) 伺服电机外观 第二章 安装 光电编码器反馈 电机工作电压H :300V L :200V 额定转速级别 1:低速(1500/2000rpm ) 2:高速(2500/3000rpm ) 零速转矩2、4、5、6、7.5、10…N.m 正弦波驱动伺服电机 电机外径 110:110× 110mm 130:130×130mm
伺服阀放大器 伺服阀放大器主要技术指标: 供电电压:DC24V (最好满足宽电压12-28VDC输入都可以) 输入信号:±10V;4~20mA 工作电流:-350~+350mA 负载:10Ω、20Ω、30Ω、40Ω、50Ω、60Ω、70Ω、80Ω 非线性度:<0.1% 重复性:<0.1% 分辨率:<0.1% 环境温度:-10oC~+70oC 伺服放大器的作用 伺服放大器作用是将输入指令信号(电压)同系统反馈信号(电压)进行比较、放大和运算后,输出一个与偏差电压信号成比例的控制电流给伺服阀力矩马达控制线圈,控制伺服阀阀芯开度大小,并起限幅保护作用。 伺服放大器的参数要求 伺服放大器作为驱动电液伺服阀的一种电子设备,相应参数有一定要求: (1)输入电压在±lO V内,方便计算机和可编程控制器等指令元件实现控制; (2)输出电流±10一±100mA可调,以便适应各种型号力矩马达伺服阀; (3)具有反馈接入端,以便构成闭环控制系统; (4)为适应伺服系统高频响的特性,伺服放大器频宽大于1200 Hz; (5)具有最大输出电流限制和输出短路保护功能,可限制伺服阀最大流量和防止输出线路短接导致故障。 (6)需要励振信号。 (7)采用导轨安装。
伺服放大器的原理(参考) 伺服放大器由指令和反馈比较处理、调零电路、限流电路、前置放大、功率放大等功能模块组成,其结构框图如图2所示。 伺服放大器的具体电路原理图如下图所示。 前置放大电路的作用是把指令和反馈输入信号进行比较和放大。该电路K。、Fbk分别为输入信号和反馈信号,通过电位器j匕调节电路增益,使其适应功率放大电路的要求,使电路电压前后级达到匹配。
三菱伺服放大器内部故障处理方法(仅供参考) AL.10 欠压 电源电压过低。MR-E-□A:160V 以下 <主要原因><处理方法> ·电源电压太低。→检查电源系统 ·控制电源瞬间停电在60ms以上。→检查电源系统 ·由于电源容量过小,导致启动时电源电压下降。→检查电源系统 ·电源切断5秒以内再接通。→检查电源系统 ·伺服放大器内部故障。→更换伺服放大器 AL.12 存储器异常1、→更换伺服放大器 AL.13 时钟异常、→更换伺服放大器 AL.14 看门狗异常、→更换伺服放大器 AL.15 存储器异常2 →更换伺服放大器 AL.12:RAM ROM异常 AL.13:印刷电路板异常 AL.14:CPU异常 AL.15:EEPROM异常 <主要原因><处理方法> ·伺服放大器内部故障。→更换伺服放大器。 AL.16 编码器异常1 编码器和伺服放大器之间通讯异常。 <主要原因><处理方法> ·接头CN2没有连接好。→正确接线。 ·编码器故障。→更换伺服电机。 ·编码器电缆故障。(断路或短路) →修理或更换电缆。 ·伺服放大器和伺服电机之间配合有误。→使用正确的配合 AL.17 电路板异常2、 AL.19 存储器异常3 AL.17:CPU·零部件异常 AL.19:ROM存储器异常 <主要原因><处理方法> ·伺服放大器内部故障。→更换伺服放大器。 AL.1A 电机配合异常 伺服放大器和伺服电机之间配合有误。 <主要原因><处理方法> ·伺服放大器和伺服电机之间的配合有误。→使用正确的配合。 ·参数No.0选择的伺服电机与当前使用的伺服放大器不匹配。→正确设定参数No.0。
AL.20 编码器异常2 编码器和伺服放大器之间通讯异常。 <主要原因><处理方法> ·编码器接头CN2没有连接好。→正确接线。 ·编码器电缆故障(断路或短路) →修理或更换电缆 ·编码器故障。→更换伺服电机。 AL.24 主电路异常 伺服电机输出端(U·V·W相)接地故障。 <主要原因><处理方法> ·在主电路端子(TE1)上电源输入和输出接线有断路。→修理电线。 ·伺服电机动力线表面损坏。→更换电线。 ·伺服放大器主电路故障。→更换伺服放大器。 制动电流超过内置再生制动电阻或再生制动选件的允许值。 再生制动晶体管异常。 内容:制动电流超过内置再生制动电阻或再生制动选件的允许值。 <主要原因><处理方法> ·参数No.0设定错误。→正确设定参数No.0 。 ·未连接内置的再生制动电阻或再生制动选件。→正确接线。 ·电源电压异常(260V以上)。→检查电源。 ·高频度或连续再生制动运行使再生电流超过了内置再生制动电阻或再生制动选件的允许值。→降低制动频度。→更换容量大的再生制动电阻或再生制动选件。→减小负载。 内容:再生制动晶体管异常。 <主要原因><处理方法> ·内置再生制动电阻或再生制动选件故障。→更换伺服放大器或再生制动选件。·再生制动晶体管故障。→更换伺服放大器。 AL.25 绝对位置数据丢失电池连接线松动或电压偏低 AL.30 再生报警检查再生能耗电路、减小负载 AL.31 超速 转速超出了瞬时允许转速。 <主要原因><处理方法> ·指令输入脉冲频率过高。→正确设定指令脉冲频率。 ·加减速时间过小导致超调过大。→增大加减速时间常数。 ·伺服系统不稳定导致超调。→重新设定增益。不能重新设定增益的场合:①负载转动惯量比设定的小一些。②重新检查加减速时间常数的设定。 ·电子齿轮比太大。(参数No.3、No.4) →正确设定。 ·编码器故障。→更换伺服电机。 参数No.3 有*标记的参数,设定后需将电源断开,再重新接通电源,参数才会生效。 电子齿轮(指令脉冲倍率分子)
MMT- 直流伺服驱动器使用手册济南科亚电子科技有限公司
直流伺服驱动器使用说明书 一、概述: 该伺服驱动器采用全方位保护设计,具有高效率传动性能:控制精度高、线形度好、运行平稳、可靠、响应时间快、采用全隔离方式控制等特点,尤其在低转速运行下有较高的扭矩及良好的性能,在某些场合下和交流无刷伺服相比更能显示其优异的特性,并广泛应用于各种传动机械设备上。 二、产品特征: ◇PWM控制H桥驱动 ◇四象限工作模式 ◇全隔离方式设计 ◇线形度好、控制精度高 ◇零点漂移极小 ◇转速闭环反馈电压等级可选 ◇标准信号接口输入0--±10V ◇开关量换向功能 ◇零信号时马达锁定功能 ◇上/下限位保护功能 ◇使能控制功能 ◇上/下限速度设定 ◇输出电流设定功能 ◇具有过压、过流、过温、输出短路、马达过温、反馈异常等保护及报警功能
三、主要技术参数 ◇控制电源电压AC: 110系列:AC :110V±10% 220系列:AC :220V±10% ◇主电源电压AC: 110系列:AC 40----110V 220系列:AC50---- 220V ◇输出电压DC: 110系列:0—130V或其它电压可设定 220系列:0—230V或其它电压可设定◇额定输出电流:DC 5A(最大输出电流10A) DC 10A(最大输出电流15A) DC 20A(最大输出电流25A)◇控制精度:0.1% ◇输入给定信号:0—±10V ◇测速反馈电压: 7V/1000R 9.5V/1000R 13.5V/1000R 20V/1000R 可经由PC板内插片选定并可接受其它规格订制四、安装环境要求: ◇环境温度:-5oC ~ +50oC ◇环境湿度:相对湿度≤80RH。(无结露) ◇避免有腐蚀气体及可燃性气体环境下使用
菱M R J B伺服放大器 应用实例 SANY标准化小组 #QS8QHH-HHGX8Q8-GNHHJ8-HHMHGN#
三菱MR-J3-40B伺服放大器应用实例 本人设计一套空间曲线自动焊接设备时用到了三菱MR-J3-40B伺服放大器,现将设计与使用心德与大家分享如下。 本空间曲线焊接设备控制系统包括三菱Q系列CPU、输入模块、输出模块、QD75MH4定位模块、人机界面和3个MR-J3-40B伺服放大器及电机。三菱MR-J3-40B伺服放大器使用主要包括电气接线、外围开关设定和参数程序设定调试等三部分。 1 电气接线 三菱MR-J3-40B伺服放大器及电机电气连接图如图1所示。 图1 MR-J3-40B伺服放大器及电机电气连接图三个伺服放大器主电路为AC220V供电,控制电路用SSCNETIII光纤通信总线电缆菊花型连接。通过SSCNETIII电缆可以最大限度地节省配线,两站之间的最大连接距离可达50米。MR-J3-40B伺服放大器与HF-KP43伺服电机之间接
线如图2所示,伺服电机HF-KP43与伺服放大器MR-J3-40B编码器接口针脚号及接线方式如图3所示。 图2 伺服与电机之间动力线接线图 图3 伺服与电机之间编码器接线图 根据上述方法连接好伺服放大器及电机的线缆后伺服放大器如图4所示。
图4 接好线后的伺服放大器 2 外围开关设置 MR-J3-40B伺服放大器外围开关设定:正常运行时,拔码开关SW2均需拔在Down。根据伺服放大器所处位置及位置模块的定义,SW1选择伺服放大器所对应的轴:SW1=0时对应第一轴,SW1=1时对应第二轴,以此类推,SW1=15时对应第十六轴。本实例中回转伺服SW1=0,升降伺服SW1=1,伸缩伺服SW1=2。如图5所示。 本系统采用绝对位置定位,所以伺服放大器需配绝对位置记忆的电池,伺服放大器的CN4接口接电池,电池如图6所示。
一、工作原理 伺服放大器由输入通道、磁放大器电路、比较放大电路、功率输出电路、状态显示以及电源电路等部分组成。其详细工作原理见图 1 所示。 该型伺服放大器的信号输入通道共有四路,分别对应图 1 中的接线端子①~⑧ ( 与磁放大器输入部分对应 ) ,其中①~②为一组;③~④、⑤~⑥、⑦ - ⑧各为一组,前三路接控制输入信号,最后一路接反馈信号。实际使用中,多采用两路信号输入,即一路为控制信号 Ic .由调节器、工控机、 DCS 或其他控制器提供,从端子①、②输入,另一路为位置反馈信号 If ,由现场电动执行机构的位置发送器提供,从端子⑦、⑧输入。 磁放大器电路:该部分主要由 DK1 ~ DK2 、 R1-R10 、 R20 ~ R22 、 V2 ~ V5 等元件构成,其作用是接受各种输入信号,并把这些信号综合,将其偏差信号放大供给后级电路使用。磁放大器 ( 即图中的 DK1 、 DK2) 共由四个结构完全相同的坡莫合金环构或。以 DK1 为例,由两个磁环构成,每个磁环上绕有一组交流激励绕组 ( 即 A-X 与 B-Y) ,把两个磁环粘在一起,绕上四组输入绕组 ( 即① - ②、③ - ④、⑤ - ⑥、⑦ - ⑧ ) 、反馈绕组 ( 即⑩ - ⑨ ) 和偏移绕组 ( 即 12-11) ,构成单臂磁放大器。 由图可见,每个单臂磁放大器上所绕线圈多达 8 组。两个单臂放大器组成推挽式磁放大器。交流激励绕组所加的激励电压是由变压器 T1 次级提供的双 18V 交流电压,激励绕组的另一端分别接有二极管 V2-V3 及 V4 ~ V5 。电阻 R8 和 R9 的直流电压之差,即为磁放大器的输出。信号输入绕组分别接有 R1 ~ R4 ,以便把各绕组的内阻都统调到 150 Ω,以利于阻抗平衡。偏移绕组由 +12V 经 R22 、 W1 、 R 2l ( 或 R20) 供给直流信号,使其产生恒定直流磁场。调整 W1 可以改变偏移电流大小,也就是调整磁放大器的零点,改变 R22 可以调整磁放大器的工作点。 R11 、 R6 是磁放大器输出的反馈电阻。从磁放大器的输出端取出部分电压,接到反馈绕组构成磁放大器的负反馈。磁放大器是利用直流电流来改变导磁体的导磁棒,使交流绕组的电感量发生变化,从而控制交流绕组中电流值。改变 R11 、 R6 可以调整磁放大器的输出为零。而当控制绕组中有输入信号时,由于此直流电流在两个单臂绕组中的流动方向相反,使其中一组磁环的导磁率及电感量减小,激励
版本号:B 东方汽轮机厂 电液伺服阀控制器说明书 编号:M902-007000BSM 第全册 2003年12 月
编号:M902-007000BSM 编制: 校对: 审核: 会签: 审定: 批准:
修改记录表
目录 序号章一节名称页数备注 1 1 前言 1 2 2 硬件简介 1 3 3 功能简介 2 4 4 使用说明9 5 5 故障指示 2 6 6 性能和参数 1 7 7 使用注意说明 1
1 前言 DEA伺服卡是为全电调控制系统DEH配套而专门设计的。该卡采用了16位单片机80C196芯片和高性能的可编程逻辑阵列CPLD构成控制核心,同时采用了16位A/D和D/A芯片提高转换精度。电源部分采用了先进的DC-DC隔离转换器,确保卡件的工作电源和供电电源的充分隔离,使卡件的电源回路工作有效可靠。在实现带电插拔的技术上采用了飞利浦的I2C串行总线技术,在校验过程中将LVDT的全关值和全开值存入E2PROM中,从而实现带电插拔。 伺服卡的工作原理是通过采集LVDT的测量值与控制系统发出的给定值构成比较环节,然后通过PI运算,最终输出调节电流控制调节阀门的运动,使阀门的开度到达给定期望到达的位置。 编制:校对:审核:标审:录入员: 1-1
2 硬件简介 伺服卡控制器的硬件主要包括伺服卡件和机箱组件: 2.1 伺服卡件 伺服卡采用的是四层印制板布线工艺,具有极高的EMC抗干扰能力。板上 主要元器件均采用进口优质元件。 2.1.1 CPU采用INTEL先进的16位单片机80C196,运算处理速度极快。该单片 机内置WATCH_DOG功能,自恢复能力强。 2.1.2 采用Xilinx公司的可编程逻辑阵列XC95108作为单片机的接口部件。该 芯片可以将众多的硬逻辑功能用软件实现,访问速度极快。同时该芯片有 许多的I/O,可以方便的实现外部接口。这样可以使伺服卡增加许多功能 而外围电路极为简单,卡件的集成度大幅度增加而可靠性也大为提高。2.1.3 采用了16位的A/D、D/A芯片作为模拟量信号的采集和输出转换,转换精 度高。其中一片A/D通过前置的通道选择器件采集各种模拟信号,两片D/A 中一片作为阀位输出信号,另外一片作为PI运算后输出电流用。伺服卡 的所有模拟量信号通道均采用了隔离放大器与外部接口实现隔离。 2.1.4 采用飞利浦的I2C串行总线技术,在校验过程中将校验所得的LVDT的全关 值和全开值存入到E2PROM中,从而使卡件在失电后不影响其使用。 2.1.5 采用DC-DC直流电源转换器,确保卡件的工作电源与供电电源实现隔离, 使卡件的电源回路和模拟信号通道在使用中更为安全可靠。伺服卡的所有 开关量信号全部用光电隔离器件与外部信号进行了隔离,确保卡件的工作 尽量不受外部信号的干扰 2.1.6 采用了双路LVDT采集通道,在其中一路LVDT工作不正常时可以实现切换。 内置振荡电路,可以作为LVDT的激励信号用,激励信号的频率和幅值可 以通过卡件上的跳线来设置。 2.1.7 面板上设有多个指示灯以指示各种状态,并有颤动量调节孔和测试端。2.1.8 伺服卡由主卡和插接在其上的数模卡构成。主卡上包括CPU、可编程逻辑 阵列、电源、输入和输出回路等;数模卡主要包含D/A、A/D等构成模拟 量回路。 2.2 机箱组件 2.2.1 机箱采用19”的电磁屏蔽机箱及组件。机箱后面的接线端子统一焊接到电 源母板上,接线方便。 2.2.2 卡件插入机箱时使用推拉式结构,拔插也十分方便。
三菱MR-J3-40B伺服放大器应用实例 本人设计一套空间曲线自动焊接设备时用到了三菱MR-J3-40B伺服放大器,现将设计与使用心德与大家分享如下。 本空间曲线焊接设备控制系统包括三菱Q系列CPU、输入模块、输出模块、QD75MH4定位模块、人机界面和3个MR-J3-40B伺服放大器及电机。三菱MR-J3-40B伺服放大器使用主要包括电气接线、外围开关设定和参数程序设定调试等三部分。 1 电气接线 三菱MR-J3-40B伺服放大器及电机电气连接图如图1所示。 图1 MR-J3-40B伺服放大器及电机电气连接图三个伺服放大器主电路为AC220V供电,控制电路用SSCNETIII光纤通信总线电缆菊花型连接。通过SSCNETIII电缆可以最大限度地节省配线,两站之间的最大连接距离可达50米。MR-J3-40B伺服放大器与HF-KP43伺服电机之间接线
如图2所示,伺服电机HF-KP43
与伺服放大器MR-J3-40B编码器接口针脚号及接线方式如图3所示。 图2 伺服与电机之间动力线接线图 图3 伺服与电机之间编码器接线图 根据上述方法连接好伺服放大器及电机的线缆后伺服放大器如图4所示。
图4 接好线后的伺服放大器 2 外围开关设置 MR-J3-40B伺服放大器外围开关设定:正常运行时,拔码开关SW2均需拔在Down。根据伺服放大器所处位置及位置模块的定义,SW1选择伺服放大器所对应的轴:SW1=0时对应第一轴,SW1=1时对应第二轴,以此类推,SW1=15时对应第十六轴。本实例中回转伺服SW1=0,升降伺服SW1=1,伸缩伺服SW1=2。如图5所示。 本系统采用绝对位置定位,所以伺服放大器需配绝对位置记忆的电池,伺服放大器的CN4接口接电池,电池如图6所示。
https://www.doczj.com/doc/4a2244901.html,
MR-E-
AG
https://www.doczj.com/doc/4a2244901.html,
https://www.doczj.com/doc/4a2244901.html,
https://www.doczj.com/doc/4a2244901.html,
注意 ● ● ● ● ● ● ● ● ● ● ● ● 根据产品的重量采用正确的方法搬运。 堆放的层数不得超过规定限制数。 搬运伺服电机时不得握住电缆、轴和编码器。 搬运伺服放大器时不得握住前盖,否则有跌落的危险。 应遵照技术资料集的规定在能承受产品重量的场所进行安装。 产品上不得踩或坐,不得压以重物。 必须遵守安装方向。 伺服放大器与控制箱的内表面,或与其它装置之间的间隔要保持规定距离。 不要安装和运行有操作、零件有缺损的伺服放大器、伺服电机。 应避免螺钉、金属片等导电性物质及油等可燃性异物进入伺服放大器、伺服电机内部。 伺服放大器和伺服电机是精密设备,应注意避免跌落和受到强冲击。 应在下述环境条件下保管和使用。 环境 周围 温度 运行 保存 周围 运行 湿度 保存 空气 标高 条件 伺服放大器 0℃~+55℃(无冰冻) -20℃~+65℃(无冰冻) 伺服电机 0℃~+40℃(无冰冻) -15℃~+70℃(无冰冻) 80%RH以下(不结露) 90%RH以下(不结露) 90%RH以下(不结露) 室内(不受直射阳光照射)无腐蚀性气体、无可燃性气体、无油雾、无尘埃 海拔1000米以下 HC-KFE系列 X·Y:49m/s2 5.9m/s2以下 HC-SFE52~152 HC-SFE202 X·Y:24.5m/s2 X:24.5m/s2 Y:49m/s2
振动
4.2.1 第一阶段 连接伺服放大器及伺服电机,进行试运行。配线方法参照3 章。 在伺服电机的输出轴未连接到机械系统的状态下进行试运行。 在第一阶段确认以下项目。 <确认> ?确认伺服放大器的电源配线(L1、L2、L3) ?确认伺服电机动力线(U、V、W)、编码器电缆线 ?确认伺服放大器、伺服电机是否正常工作 ?确认参数4 号(旋转方向切换/CCW(逆时针)方向旋转时的相位切换)■试运行顺序 (1) 请固定伺服电机,以防其横向翻倒。 将伺服电机牢固固定 不要在电机的输出轴上安装任何东西 (2) 请按3 章的配线,为伺服放大器与伺服电机配线。 ※第一阶段进行单体试运行,故不要连接到CN1 上。 (3) 请确认4-2 页的「■初次通电前的注意事项」后,再通电。 i) 请确认充电用显示灯。 ii) 请确认触摸面板显示。 ※万一报警检出时,请切断电源,确认配线后,参照9 章。
请预习说明书的第4章和第8章。 5 参数 5.1 参数构成 伺服放大器中有调整机械系统的设定、伺服的特性与精度的各种参数。 由于参数的设定值被存储在可电换写的ROM (EEPROM) 中,因此,即使切断电源也不会丢失。 作为参数一览表的"变更" 项目的"电源" 的参数,即使切断主电源,再接通电源时仍然有效。(请确认主电源切断时,伺服放大器的触摸面板<7 段文字显示>灯灭。) 5.1.1 利用触摸面板编集的方法 5-2
5.2 参数一览表
5.3 参数说明 以每一命令脉冲的机械系统的移动量为单位量设定参数(电子齿轮)。利用以下计算式计算。
提示:当伺服电机旋转一周时的机械系统的移动量中有π时,355/113 可以近似。 输出脉冲数和命令脉冲补偿无关。根据参数19 号的设定值,电机轴正转时,输出B 相进给90°相位差2 路信号。
一文告诉你为什么伺服放大器前要用电抗器 本文主要详解伺服放大器前要用电抗器的原因是什么,首先介绍了伺服放大器的作用及原理,其次阐述了为什么伺服放大器前要用电抗器的解答,跟随小编来详细的了解一下。 伺服放大器的作用及原理伺服放大器的作用是将多个输入信号与反馈信号进行综合并加以放大,根据综合信号极性的不同,输出相应的信号控制伺服电机正转或反转。当输入信号和反馈信号相平衡时,伺服电机停止转动,执行机构输出轴便稳定在一定位置上。 伺服放大器组要由前置磁放大器、触发器、晶闸管主回路和电源等部分组成,其组成如下图所示。 为适应复杂的多参数调节的需要,伺服放大器设置由三个输入信号通道和一个位置反馈信号通道。因此,它可以同时输入三个输入信号和一个位置反馈信号。在单参数的简单调节系统中,只使用其中一个输入通道和反馈通道。 在伺服放大器中,前置磁放大器把三个输入信号和一个反馈信号综合为偏差信号,并放大为电压信号U22-21输出。此输出电压同时经触发器1(或2)转换成触发脉冲去控制晶闸管主回路1(或2)的晶闸管导通,从而将交流220V电源加到两相伺服电机绕组上,驱动两相伺服电动机转动。当△1》0时,U22-21》0,触发器2和主回路2工作,两相伺服电机正转;当△1《0时,,触发器1和主回路1工作,两相伺服电机反转;两组触发器和两组晶闸管主回路的电路组成及参数完全相同,所以当输入信号和与位置反馈电流If相平衡,前置磁放大器的输出U22-210,两触发器均无触发脉冲输出,主回路1和2中的晶闸管阻断,两相伺服电动机的电源断开,电动机停止转动。 由此可见,伺服放大器相当于一个三位式无触点继电器,并具有很大的功率放大能力。伺服放大器前要用电抗器的原因解析伺服放大器是运动控制系统的重要组成部分,提供伺服电机频率可调的电源,实现高精度的传动系统定位,目前是传动技术的高端产品。少则几千、多则上万元的伺服放大器的使用应该十分小心,尽量延长其使用寿命
三菱伺服说明书MR-J2-B伺服放大器手册(英文) 8 - 1 Alarm and warning lists 报警和警告名单 When a fault occurs during operation, the corresponding alarm or warning is displayed. If any alarm or warning has occurred, refer to Section 8.2 or 8.3 and take the appropriate s Warnings:当故障发生在操作过程中,相应的报警或显示警告。如果任何警报或警告发生,请参阅第8.2或8.3,并采取适当的行动。报警警告 Display Name 显示名称 10 Undervoltage 10欠压 11 Board error 1 11 局错误1 12 Memory error 12内存错误1 13 Clock error 14时钟误差 15 Memory error 2 15 内存错误2 16 Encoder error 1 16 编码器错误1 17 Board error 2 17局错误2 18 Board error 3 18局的错误3 20 Encoder error 2 20编码器错误2 24 Ground fault 24接地故障 25 Absolute position erase 25绝对位置擦除 30 Regenerative error 3 0再生错误 31 Overspeed 31超速 32 Overcurrent 32过流 33 Overvoltage 33过压保护 34 CRC error 34 CRC错误 35 Command F T error 35指挥F t误差 36 Transfer error 36传输错误 37 Parameter error 37参数错误 46 Servo motor overheat 46伺服电机过热 50 Overload 1 50超载1 51 Overload 2 51超载2 52 Error excessive 52错误过多 8E RS-232C error 8E型的RS - 232错误 88 Watchdog 88看门狗 92 Open battery cable warning 92打开电池电缆警告 96 Zero setting error 96零设定错误过度负荷的 E0 Excessive regenerative load warning E0再生警告 E1 Overload warning E1超载警告 E3 Absolute position counter warning E3展绝对位置计数器警告 E4 Parameter warning E4类参数警告 E6 Servo emergency stop E6伺服紧急停止 E7 Controller emergency stop E7的紧急停止控制器 E9 Main circuit off warning E9主回路关闭警告
伺服放大器 二次切割车的大车是采用交流伺服电机来传动的,在学习伺服放大器之前,对伺服电机做个简单的掌握,伺服电机作为特殊的控制电机,结构特殊具有以下几个特点: 1.无自转现象,及当信号电压为零时,电动机应迅速自行停转。 2.具有下垂的机械特性。在控制电压改变时,电动机能在较宽的转速范围内稳 定运行。 3.具有线性的机械特性和调节特性。 4.快速响应。对信号反应灵敏,机电时间常数小。 交流伺服电机就是两相异步电动机,有励磁绕组Uf,控制绕组Uk,其相位差为90°电机运行时,励磁绕组接单相交流电压Uf,控制绕组接控制电压Uk,两者频率相同。转子为鼠笼式转子,改变控制电压Uk的幅值或相位,就可以控制电机转速的控制。在二次切割车中伺服电机的驱动控制是通过伺服放大器来实现的。伺服放大器有主回路和控制回路构成。 一.伺服放大器主回路 图一伺服放大器主回路 a 整流回路:将交流转变成直流,可分为单相和三相整流桥,平滑电容:对整流电源进行平滑,减少其脉动成分。 c再生制动:所谓再生制动就是指马达的实际转速高于指令速度时,产生能量回馈的现象。再生制动回路就是用来消耗这些回馈能源的装置。 d 逆变回路:生成适合马达转速的频率、适合负载转矩大小的电流,驱动马达。逆变
模块采用IGBT开关元件。 e 动态制动器:具有在基极断路时,在伺服马达端子间加上适当的电阻器进行短路消耗旋转能,使之迅速停转的功能。 二.伺服放大器控制回路 1.位置控制处理流程 假设脉冲指令为1个脉冲,输入时动作为: 电流环 ①偏差计数器成为+1 ②转变为1个脉冲对应的电压进入放大器 ③放大器产生SPWM波驱动马达旋转 ④编码器也相应旋转,发出1脉冲的震荡 ⑤1脉冲的震荡再次输入到偏差计数器中,从原来的指令+1减去1脉冲的震荡,计数器值成为0 ⑥结果使DA转换输出0V到放大器,放大器使马达停止 ⑦完成1脉冲的定位 2.速度控制处理流程 ①模拟量形式的速度指令进入速度运算器,使电机开始运行 ②电机运行后使用编码器旋转,发出脉冲反馈 ③脉冲反馈经过FV转化为相应的模拟量进入伺服驱动器 ④反馈值与给定值相比较,如果有偏差通过电流环输出控制电流使用其差值改为零 3.伺服放大器三种控制方式 ①转矩控制:通过外部模拟量的输入或直接的地址的赋值来设定电机轴对外的输出
汉坤1.3 伺服放大器的使用 1.3.1伺服放大器的参数设置 伺服放大器参数 NO 符号名称设定值*P00 STY 控制模式OOOO *O1OP1 功能选择OOO3 O2ATU 自动调整O3O1 O3CMX 电子齿轮(指令脉冲倍率分子)16 O4CDV 电子齿轮(指令脉冲倍率分母)1 O5INP 定位范围15 O6PG1 位置环增益112 O7PST 位置斜坡功能15 11STA 加速时间常数946 12STB 减速时间常数 *22 OP4 功能选择4OOOO 23FFC 前馈增益1000 24ZSP 零速10 25VCM 模拟量速度指令(限制)最大速度0 26TLC 模拟量转矩指令最大输出100 *27 ENR 编码输出8192 28TL1 内部转矩限制1100 34GD2 负载和伺服电机的转动惯量比100 35PG2 位置环增益215 36VG1 速度环增益160 37VG2 速度环增益2530 38VIC 速度积分补偿110 39VDC 速度微风补偿980 40备用1 *41 DIA 输入信号自动ON选择OOOO 50备用OOOO *51 OP6 功能选择6O100 52备用OOOO 56SIC 串行通讯超时选择0 57备用10
58NH1 机械共振抑制滤波1OOO1 59NH2 机械共振抑制滤波2O31F 60LPF 低通滤波器,自适应共振抑制控制OOOO 注:以上参数仅供参考,详细细节请查阅伺服放大器说明书 1.3.2 伺服电机的控制 伺服电机正常运行必须具备的条件: 1、LSP、LSN必须处于常闭状态 2、ALM、EMG处于常闭 3、SON为1时电机才能运动,此时电机处于制动状态,推不动,SON为0,可以推动电机。 4、CN1A、CN1B、编码器插头必须正确插入到伺服放大器上。 注:LSP、LSN、SON如果硬件条件不满足,可以在伺服控制器内部设置成1。但是在系统正常运行后,必须采用外部硬件来满足,不可采用内部置1。 伺服放大器电子齿轮比的设定:即NO3,NO4的设定,该系统中,NO4设定为1, NO3=131072/NO27. 1.3.3 伺服电机常见的问题 ●伺服放大器的的参数NO.2一般设置为0201即自动调整模式,此时相应 NO.6,NO35,NO36,NO37,NO38的参数自动调整,如果在运动过程中电机发出嗡嗡的响声,可能是伺服放大器的参数设置不当所致。可把伺服放大器的参数NO.2该为0301手动模式,手动调整各个参数。 ●由于伺服电机是靠脉冲控制,所以要尽量避免变频器干扰。变频器选型时可考虑增加虑 波器。 ●调试过程中如果发现小车运动的反向与实际反向不符时,即电机正向,实际为反向,电 机反向实际为正向,此时修改伺服放大器的NO.54 改变伺服电机的旋转反向。 注:其他报警请参阅伺服放大器说明书。说明书已经很详尽的将所有可能出现的报警列出以及其排除故障。 1.3.4伺服电机的接线 定位模块FM353实现伺服电机的定位。其引脚定义如下。 伺服放大器CN1A接线颜色定义 插头引脚序号线色名称备注 2 银灰NP 353模块 3 粉PP 353模块
MOOG伺服阀放大器 MOOG伺服阀放大器J761-001/J761-004 MOOG伺服阀放大器,MOOG伺服阀放大器,MOOG伺服阀放大器, 伺服阀放大器 简介 MOOG伺服阀放大器J761-001/J761-004 SVC系列伺服放大器为电液伺服阀的驱动、控制专用控制器。该系列放大器能对射流管伺服阀、喷档伺服阀及国外各种电液伺服阀进行高精度控制,通过采用各种液压设备和测量传感器构成对位置、速度、加速度、力等物理量进行控制的电液伺服系统,如:阀控油缸、阀控马达、阀控泵等。 特点 MOOG伺服阀放大器J761-001/J761-004 稳定可靠 全部采用进口低飘移、高稳定度的运算放大器,使控制系统能长期、可靠、稳定地工作。灵活方便 系统所需要调整的调零、输入增益反馈增益、放大增益、电流选择开关均设在仪器面板上。线路独特 独特的功放电路设计,可适合各种电液伺服阀,并带有过流自动保护电路。 电流输出直观 采用数显电流表,流过阀线圈的电流明确,精度达到±0.1mA。 维修方便
该控制器备有详细的电气原理图,并采用通用电气元件,具备一般电气知识的工程技术人员均可照图维修。 原理框图 MOOG伺服阀放大器J761-001/J761-004 各型号及性能参数 MOOG伺服阀放大器J761-001/J761-004 SVC-Ⅰ型: 为机箱式控制放大器,交流220V供电,输出电流可选择,并能直观地显示阀电流,不带颤振信号。性能参数如下: 供电电源 AC220V 50Hz 输出电源DC±15V +5V 增益 K1=1.4 K2=1 K3=1~15mA/V 输入阻抗 33kΩ 输入指令Vpp≤±10V