秦驰
L297的工作原理介绍
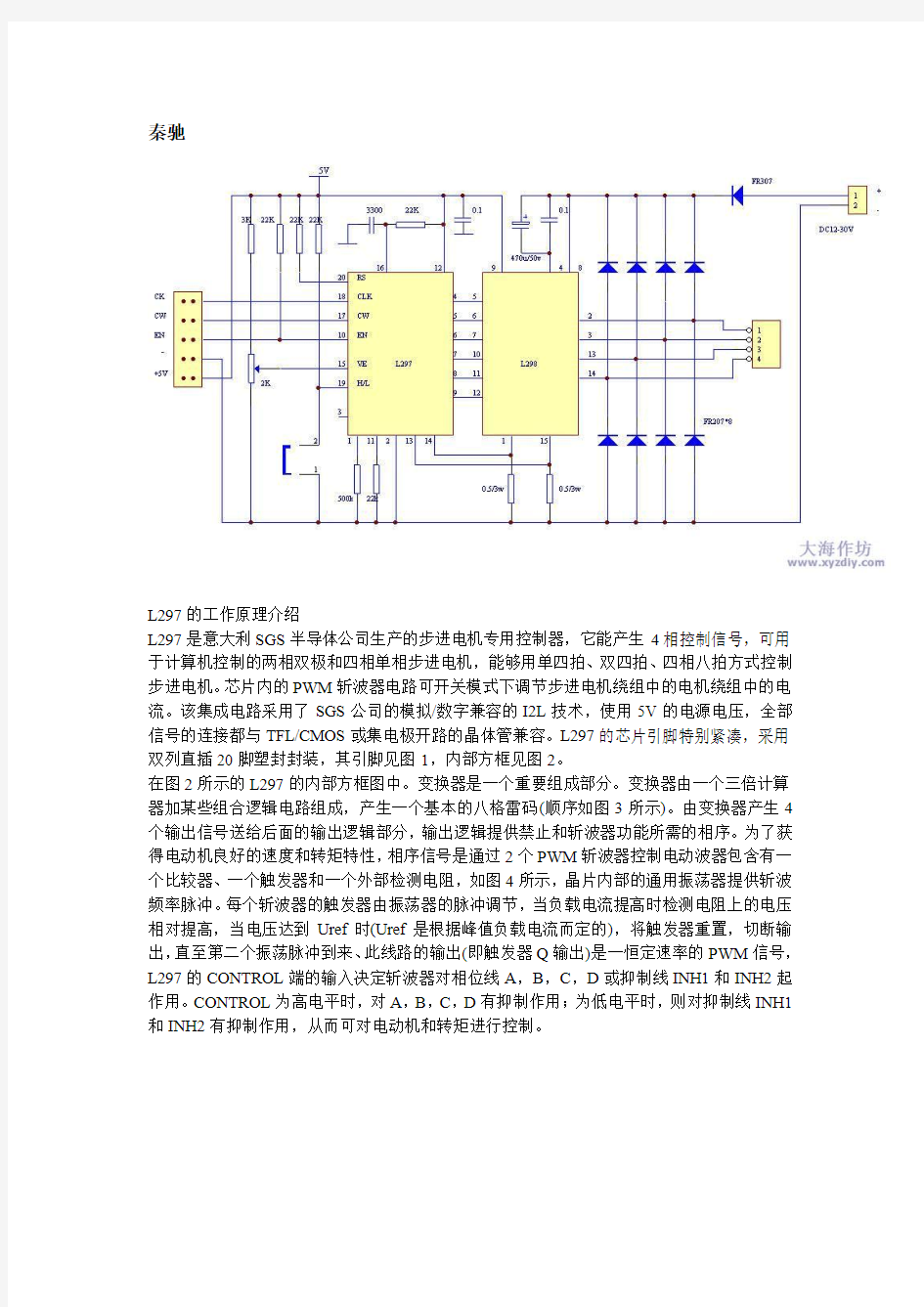
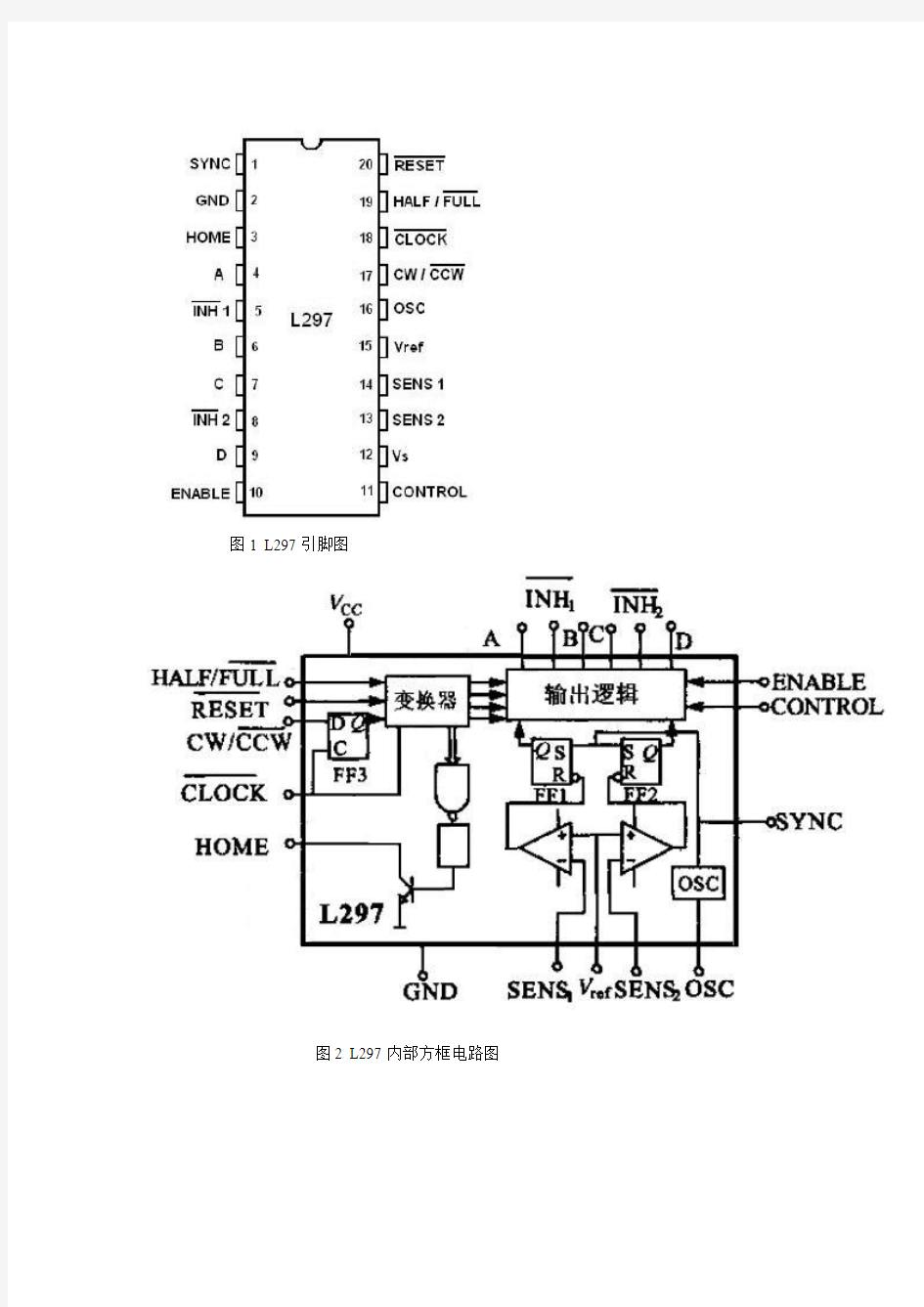
L297是意大利SGS半导体公司生产的步进电机专用控制器,它能产生4相控制信号,可用于计算机控制的两相双极和四相单相步进电机,能够用单四拍、双四拍、四相八拍方式控制步进电机。芯片内的PWM斩波器电路可开关模式下调节步进电机绕组中的电机绕组中的电流。该集成电路采用了SGS公司的模拟/数字兼容的I2L技术,使用5V的电源电压,全部信号的连接都与TFL/CMOS或集电极开路的晶体管兼容。L297的芯片引脚特别紧凑,采用双列直插20脚塑封封装,其引脚见图1,内部方框见图2。
在图2所示的L297的内部方框图中。变换器是一个重要组成部分。变换器由一个三倍计算器加某些组合逻辑电路组成,产生一个基本的八格雷码(顺序如图3所示)。由变换器产生4个输出信号送给后面的输出逻辑部分,输出逻辑提供禁止和斩波器功能所需的相序。为了获得电动机良好的速度和转矩特性,相序信号是通过2个PWM斩波器控制电动波器包含有一个比较器、一个触发器和一个外部检测电阻,如图4所示,晶片内部的通用振荡器提供斩波频率脉冲。每个斩波器的触发器由振荡器的脉冲调节,当负载电流提高时检测电阻上的电压相对提高,当电压达到Uref时(Uref是根据峰值负载电流而定的),将触发器重置,切断输出,直至第二个振荡脉冲到来、此线路的输出(即触发器Q输出)是一恒定速率的PWM信号,L297的CONTROL端的输入决定斩波器对相位线A,B,C,D或抑制线INH1和INH2起作用。CONTROL为高电平时,对A,B,C,D有抑制作用;为低电平时,则对抑制线INH1和INH2有抑制作用,从而可对电动机和转矩进行控制。
图1 L297引脚图
图2 L297内部方框电路图
图3 L297变换器换出的八步雷格码(顺时针旋转)图4 斩波器线路
图5 多个L297同步工作连接图
L297 ELECTRICAL CHARACTERISTICS (Refer to the block diagram Tamb = 25℃, Vs = 5V unless otherwise
1脚(SYNG)——斩波器输出端。如多个297同步控制,所有的SYNC端都要连在一起,共用一套振荡元件。如果使用外部时钟源,则时钟信号接到此引脚上。
2脚(GND)——接地端。
3脚(HOME)——集电极开路输出端。当L297在初始状态(ABCD=0101)时,此端有指示。当此引脚有效时,晶体管开路。
4脚(A)——A相驱动信号。
5脚(INH1)——控制A相和B相的驱动极。当此引脚为低电平时,A相、B相驱动控制被禁止;当线圈级断电时,双极性桥用这个信号使负载电源快速衰减。若CONTROL端输入是低电平时,用斩波器调节负载电流。
6脚(B)——B相驱动信号。
7脚(C)——C相驱动信号。
8脚(INH2)——控制C相和D相的驱动级。作用同INH1相同。
9脚(D)——D相驱动信号。
10脚(ENABLE)——L297的使能输入端。当它为低电平时,INH1,INH2,A,B,C,D都
为低电平。当系统被复位时用来阻止电机驱动。
11脚(CONTROL)——斩波器功能控制端。低电平时使INH1和INH2起作用,高电平时使A,B,C,D起作用。
12脚(Vcc)——+5V电源输入端。
13脚(SENS2)——C相、D相绕组电流检测电压反馈输入端。
14脚(SENS1)——A相、B相绕组电流检测电压反馈输入端。
15脚(Vref )——斩波器基准电压输入端。加到此引脚的电压决定绕组电流的峰值。
16脚(OSC)——斩波器频率输入端。一个RC网络接至此引角以决定斩波器频率,在多个L297同步工作时其中一个接到RC网络,其余的此引角接地,各个器件的脚I (SYNC)应连接到一起这样可杂波的引入问题如图5所示。
17脚(CW/CCW)—方向控制端。步进电机实际旋转方向由绕组的连接方法决定。当改变此引脚的电平状态时,步进电机反向旋转。
18脚(CLOCK)——步进时钟输入端。该引脚输入负脉冲时步进电机向前步进一个增量,该步进是在信号的上升沿产生。
19脚(HALF/FULL)——半步、全步方式选择端。此引脚输入高电平时为半步方式(四相八拍),低电平时为全步方式。如选择全步方式时变换器在奇数状态,会得到单相工作方式(单四拍)。
20脚(RESET)——复位输入端。此引脚输入负脉冲时,变换器恢复初始状态(ABCD=0101)。
L297驱动相序的产生
L297能产生单四拍、双四拍和四相八拍工作所需的适当相序。3种方式的驱动相序都可以很容易地根据变换器输出的格雷码的顺序产生,格雷码的顺序直接与四八拍(半步方式)相符合,只要在脚19输入一高电平即可得到。其波形图如图6所示。
图6 四相八拍模式波形图
通过交替跳过在八步顺序中的状态就可以得到全步工作方式,此时需在脚19接一低电平,前已述及根据变换器的状态可得到四拍或双四拍2种工作模式,如图7,8所示。
图7 单四拍模式波形图
图双四拍模式波形图
L298简介:
L298N 为SGS-THOMSON Microelectronics 所出产的双全桥步进电机专用驱动芯片( Dual Full-Bridge Driver ) ,内部包含4信道逻辑驱动电路,是一种二相
和四相步进电机的专用驱动器,可同时驱动2个二相或1个四相步进电机,内含二个H-Bridge 的高电压、大电流双全桥式驱动器,接收标准
TTL逻辑准位信号,可驱动46V、2A以下的步进电机,且
可以直接透过电源来调节输出电压;此芯片可直接由单片机的IO端口来提供模拟时序信号,
但在本驱动电路中用L297 来提供时序信号,节省了单片机IO 端口的使用。L298N 之接脚如图9 所示,Pin1 和Pin15 可与电流侦测用电阻连接来控制负载的电路;OUTl、OUT2 和OUT3、OUT4 之间分别接2 个步进电机;input1~input4 输入控制电位来控制电机的正反转;Enable 则控制电机停转。
图9 L298引脚图
图10 L298 内部逻辑图
Symbol符号Parameter 参数Value数值单位VS Power Supply 电源50 V VSS Logic Supply Voltage 电源电压7 V VI,Ven Input and Enable Voltage 输入电压和启用–0.3 to 7 V
IO 峰值输出电流(每通道)
A
非重复性(t= 100ms) 3 重复(80% on –20% off; ton = 10ms) 2.5 直流运行 2
Vsens Sensing V oltage 感应电压–1 to 2.3 V Ptot Total Power Dissipation (Tcase=75℃)总功率耗散(Tcase=75 ℃) 25 W Top Junction Operating Temperature 结工作温度–25 to 130 ℃Tstg,Tj Storage and Junction Temperature 储存温度–40 to 150 ℃
Ien = L Low V oltage Enable Current (pins 6, 11)
低电平启动电流
Ven = L –10
μA
Ien = H High V oltage Enable Current (pins 6, 11)
高电平启动电流
Ven =H ≤VSS –0.6V 30 100
μA
VCEsat(H) Source Saturation Voltage IL =1A 0.95 1.35 1.7
V IL =2A 2 2.7
VCEsat(L) Sink Saturation Voltage IL = 1A (5) 0.85 1.2 1.6
V IL = 2A (5) 1.7 2.3
VCEsat Total Drop IL = 1A (5) 1.80 3.2
V IL = 2A (5) 4.9
Vsens Sensing Voltage电流监测电压(引脚1,15) –1(1) 2 V
图11 L298 外形图
L297/L298组合应用实例:
97加驱动器组成的步进电机控制电路具有以下优点:使用元件少,组件的损耗低,可靠性高体积小,软件开发简单,并且计算机(或单片机)硬件费用大大减少。L297与L298配合使用控制双极步进电机工作电流可达2.5A;如与L293E配套使用,步进电机绕组电流。图12为L297和L298组成的控制驱动器的线路图。
L297的特性是只需要时钟、方向和模式输入信号。相位是由内部产生的,因此可减轻计算机(或单片机)和程序设计的负担。L298芯片是一种高压、大电流双H桥式驱动器。
L297和L298组合控制驱动的步进电机可用于如打印机的托架位置、记录仪的进给机构,以及打字机、数控机床、软盘驱动器、机器人、绘图机、复印机、阀门等设备和装置。
图12 L297/L298典型应用电路图
步进电机工作和控制原理 一、综述 步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角。这一线性关系的存在,加上步进电机只有周期性的误差而无累积误差等特点。使得在速度、位置等控制领域用步进电机来控制变的非常的简单。步进电机是将电脉冲信号转变为角位移或线位移的一种开环线性执行元件,具有无累积误差、成本低、控制简单特点。产品从相数上分有二、三、四、五相,从步距角上分有0.9°/1.8°、0.36°/0.72°,从规格上分有口42~φ130,从静力矩上分有 0.1N·M~40N·M。签于上述情况,我们决定以广泛的感应子式步进电机为例。叙述其基本工作原理。 二、感应子式步进电机工作原理 (一)反应式步进电机原理 由于反应式步进电机工作原理比较简单。下面先叙述三相反应式步进电机原理。 1、结构: 电机转子均匀分布着很多小齿,定子齿有三个励磁绕阻,其几何轴线依次分别与转子齿轴线错开。 0、1/3て、2/3て,(相邻两转子齿轴线间的距离为齿距以て表示),即A与齿1相对齐,B与齿2向右错开1/3て,C与齿3向右错开2/3て,A'与齿5相对齐,(A'就是A,齿5就是齿1)下面是定转子的展开图: 2、旋转: 如A相通电,B,C相不通电时,由于磁场作用,齿1与A对齐,(转子不受任何力以下均同)。 如B相通电,A,C相不通电时,齿2应与B对齐,此时转子向右移过1/3て,此时齿3与C偏移为1/3て,齿4与A偏移(て-1/3て)=2/3て。 如C相通电,A,B相不通电,齿3应与C对齐,此时转子又向右移过1/3て,此时齿4与A偏移为1/3て对齐。 如A相通电,B,C相不通电,齿4与A对齐,转子又向右移过1/3て
课程设计说明书 课程设计名称:数字电路课程设计 课程设计题目:步进电机简单的控制电路 学院名称:南昌航空大学信息工程学院 专业:班级: 学号:姓名: 评分:教师: 2013 年 9 月 9 日 数字电路课程设计任务书 20 13-20 14 学年第 1 学期第 2 周- 4 周
注:1、此表一组一表二份,课程设计小组组长一份;任课教师授课时自带一份备查。 2、课程设计结束后与“课程设计小结”、“学生成绩单”一并交院教务存档。
步进电机是一种原理为利用电子电路的电脉冲信号转变为角位移或线位移的感应电机。通过简单的数字电路来控制它的转速并可以利用数码管来计算其转动的圈数,便可以实现电机的正反向转动,并且在数码管上精确的显示出它转动的圈数,从而广泛应用于实际生活当中。其中涉及到计算机,数字电路,电机,机械,完成了简单的自动化控制流程,将所学知识应用于工程中,增加实践动手能力。 关键词:分频、时序控制、脉冲计数
前言 (1) 第一章设计内容及要求 (1) 第二章系统的组成及工作原理 (2) 第三章单元电路设计 (2) 3.1多谐振荡器 (2) 3.2 步进电机信号控制电路 (3) 3.3转速的测量及显示电路 (4) 第四章调试 (5) 4.1电路排板及制作 (5) 4.2电路的调试 (5) 第五章总结 (6) 附录1:设计原理图 (7) 附录2:PCB电路图 (8) 附录3: 元件清单 (9)
前言 步进电机最早出现于上世纪,源于资本主义的造船工业,是一种可以自由转动的电磁铁,其工作原理和如今的反应式电机差不多,是依靠磁导来产生电磁矩,从而实现转动。 到了80年代之后,微型计算机逐步的应用于工业与生活中,使得步进电机的控制更加的灵活多样,最主要的是利用分立元件或者小型的集成电路来控制,但是对元件的需求量很大,调试也很复杂,出现问题需要花大量的精力来调试,因此,通过计算机软件来控制步进电机是必然的趋势,以提高工作效率。 现在的步进电机主要是由数字电路组成,也是利用集成电路来控制电路,但是大大的提高了其精度,更好的满足工业发展的需要。目前用到最多的是混合式步进电机,并具有很好的发展前景。 步进电机按照工作原理可分为永磁式、磁阻式和永磁感应子式三种。 今后步进电机将会有以下四个方面的发展,为减小其占用的空间从而会往小型方向发展,以更加的适用于工业制造当中;为增加力矩,从而会将圆形改为方形,以提高其工作效率;为体现其优越的控制性能,从而会偏向于一体化设计,以实现电子自动化控制,更加灵活方便;为降低其成本,增加其性能,从而会向三相和五相的方向发展,以充分实现其优越性能。 步进电机以其显着的特点,在电子数字化时代将发挥重大作用,将广泛应用于数控车床、机器人、航空工业和电子领域中,可完成工作量大,任务复杂、精度高的制造业以及代替人类完成不利于身体健康的工业中,为生活带来更多的便利。 第一章设计内容及要求 基本要求:1、利用proteus软件设计步进电机的工作原理图,并进行仿真。 2、调试及实现。 (1)实现步进电机根据输入的脉冲旋转的相应圈数。 (2)可以实现复位,正反转控制,由4个LED代替4个线圈。 (3)实现步进电机的加速、减速功能。
步进电机的控制原理及其单片机控制实现 一前言 步进电机可以对旋转角度和转动速度进行高精度控制。步进电机作为控制执行元件,是机电一体化的关键产品之一,广泛应用在各种自动化控制系统和精密机械等领域。随着微电子和计算机技术的发展,步进电机的需求量与日俱增,在各个国民经济领域都有应用。步进电机和普通电动机不同之处是步进电机接受脉冲信号的控制。现在比较常用的步进电机包括反应式步进电机、永磁式步进电机、混合式步进电机和单相式步进电机等。其中反应式步进电机的转子磁路由软磁材料制成,定子上有多相励磁绕组,利用磁导的变化产生转矩。现阶段,反应式步进电机获得最多的应用。 步进电机和普通电机的区别主要在于其脉冲驱动的形式,正是这个特点,步进电机可以和现代的数字控制技术相结合。不过步进电机在控制的精度、速度变化范围、低速性能方面都不如传统的闭环控制的直流伺服电动机。在精度不是需要特别高的场合就可以使用步进电机,步进电机可以发挥其结构简单、可靠性高和成本低的特点。使用恰当的时候,甚至可以和直流伺服电动机性能相媲美。 二 1.步进电机的控制原理 步进电机2个相邻磁极之间的夹角为60°。线圈绕过相对的2个磁极,构成一相(A-A′,B-B′,C-C′)。磁极上有5个均匀分布的矩形小齿,转子上没有绕组,而有40个小齿均匀分布在其圆周上,且相邻2个齿之间的夹角为9°当某组绕组通电时,相应的2个磁极就分别形成N-S极,产生磁场,并与转子形成磁路。如果这时定子的小齿与转子没有对齐,则在磁场的作用下转子将转动一定的角度,使转子齿与定子齿对齐,从而使步进电机向前“走”一步。 2. 步进电机的控制方式 如果通过单片机按顺序给绕组施加有序的脉冲电流,就可以控制电机的转动,从而实现数字→角度的转换。转动的角度大小与施加的脉冲数成正比,转动的速度与脉冲频率成正比,而转动方向则与脉冲的顺序有关。以三相步进电机为例,电流脉冲的施加共有3种方式。(1)单相三拍方式(按单相绕组施加电流脉冲):→A→B→C→正转;→A→C→B→反转。(2)双相三拍方式(按双相绕组施加电流脉冲):→AB→BC→CA→正转;→AC→CB→AB→反转。(3)三相六拍方式(单相绕组和双相绕组交替施加电流脉冲):→A→AB→B→BC→C→CA→正转;→A→AC→C→CB→B→BA→反转。单相三拍方式的每一拍步进角为3°,三相六拍的步进角则为1.5°,因此,在三相六拍下,步进电机的运行反转平稳柔和,但在同样的运行角度与速度下,三相六拍驱动脉冲的频率需提高1倍,对驱动开关管的开关特性要求较高。 3. 步进电机的驱动方式 步进电机常用的驱动方式是全电压驱动,即在电机移步与锁步时都加载额定电压。为了防止电机过流及改善驱动特性,需加限流电阻。由于步进电机锁步时,限流电阻要消耗掉大量的功率,故限流电阻要有较大的功率容量,并且开关管也要有较高的负载能力。步进电机的另一种驱动方式是高低压驱动,即在电机移步时,加额定或超过额定值的电压,以便在较大的电流驱动下,使电机快速移步;而在锁步时,则加低于额定值的电压,只让电机绕组流过锁步所需的电流值。这样,既可以减少限流电阻的功率消耗,又可以提高电机的运行速度,但这种驱动方式的电路要复杂一些。驱动脉冲的分配可以使用硬件方法,即用脉冲分配器实现。现在,脉冲分配器已经标准化、芯片化,市场上可以买到。但硬件方法结构复杂,成本也较高。步进电机控制(包括控制脉冲的产生和分配)也可以使用软件方法,即用单片机实现,下面给出具体的使用单片机以软件方式驱动步进电机的实现方法。 三步进电机的单片机控制 1. 双相三拍控制
黄冈职业技术院 系别:07 机电工程系 专业: 应用电子 班级:二班 设计者:戴久志、邓修海、徐凯 指导老师: 温锦辉 设计课题: 液晶8279步进电机系统 设计时间: 二0一一年四月二十号 步进电机控制电路设计 1、系统基本方案 根据设计要求,步进电机控制电路可以分为控制模块、显示模块、电源模块、键盘模块、电机驱动模块、步进电机部分。步进电机控制电路基本模块方框图如图1.1所示。 2、系统硬件设计与实现 2.1、步进电机介绍 随着工业技术的不断进步,在自动化控制、精密机械加工、航空航天技术及所有要求高
精度定位等高新技术领域,步进电机的得到了广泛的应用。步进电机是一种将脉冲信号转化为角位移的执行机构。若在其输入端加入有规律的脉冲信号,就能驱动步进电机按设定的方向移动一定的距离或转动一个角度(称为“步距角”)。从结构上步进电机分为单相、双相、三相、四相、五相、六相等多种。本次设计使用步进电机分为A、B、C、D四相绕组,每相通电一次称为一拍。四相步进电机根据不同的通电规律可分为几种工作模式: ⑴、四相单四拍:A-B-C-D; ⑵、四相双四拍:AB-BC-CD-DA; ⑶、四相单八拍:A-AB-B-BC-C-CD-D-DA; ⑷、四相双八拍:AB-ABC-BC-BCD-CD-CDA-DA-DAB。 步进电机的正反转与电机每相的通电顺序有关,可以改变相序来改变电机的正反转。步进电机每步所旋转角度的大小,称为步距角(βB)。它是由电机本身转子的齿数(Z R)。一个通电循环内通电节拍数(M Q)决定的。即βB=360/ Z R M Q。电机出厂的步距角是固定的。四相步进电机的步距角为0.90/1.80(表示半步工作时为0.90,整步工作时为1.80)。步进电机转速的高低与控制脉冲频率有关。改变控制脉冲频率,可改变电机转速。 2.2、步进电机驱动模块 步进电机的驱动电路采用常用的电动机驱动芯片L298,它能够接受标准的TTL电平控制信号,驱动电机。L298操作时能提供的电压能达到46V,直流电流4A,具有过热保护功能,逻辑“0”的输入电压达到1.5V。L298在控制器的控制下驱动一个步进电动机,控制器产生L298年需的控制信号,以控制步进电机的运动状态。为了防止定子绕组的电感作用,使得电流切换时产生过电压,步进电机每相绕组两端都须并联一个用天在换相时起续流作用的肖基特二极管。步进电机驱动电路原理图如图 图2.2.1 步进电机驱动电路原理图 2.3、控制子程序 2.3.1、四相单四拍正转子程序 四相单四拍正转子程序主要用于控制步进电机以步距角为 1.80角度顺时针旋转。控制器从端口依次向步进电机的每相输出脉冲信号。每输出一个脉冲信号步进电机转动一定的角度。其工作模式为:A-B-C-D。 ;******单四拍正转****** MOV P1,#01H ACALL DELAY2 MOV P1,#02H ACALL DELAY2 MOV P1,#04H ACALL DELAY2 MOV P1,#08H ACALL DELAY2 2.3.2、四相单四拍反转子程序 四相单四拍反转子程序主要用于控制步进电机以步距角为 1.80角度逆时针旋转。其工作模式为:D-C-B-A。 ;******四拍反转******
指导教师评定成绩: 审定成绩: 重庆邮电大学 自动化学院 自动控制原理课程设计报告 设计题目: 单位(二级学院):自动化学院 学生姓名: 专业:自动化 班级: 学号: 指导教师: 设计时间:2010 年 6 月 重庆邮电大学自动化学院制
目录 目录 (2) 一、设计题目 (3) 1题目内容 (3) 2实现目标 (3) 3设计要求 (3) 4 设计安排 (3) 二、设计报告正文 (3) 1步进电机的概论 (4) 2步进电机的驱动控制系统 (6) 3系统设计思路 (10) 4步进电机的控制电路 (13) 三、设计总结 (15) 四、参考文献 (16)
一、设计题目 1题目内容 基于51单片机的步进电机调速设计 2实现目标 1)具有与PC机串口通信的功能; 2)具有与数码管显示或者LED指示灯显示状态(数码管显示的速度并不代表电 机实际速度,只是一个感性的认识) 3设计要求 1)绘制原理图,PCB; 2)完成单片机所有代码编写; 3)设计PC机简易显示界面; 4设计安排 三个人一组,为期一周,小组成员合作,共同完成设计要求。 二、设计报告正文 摘要:步进电机是一种将电脉冲转换成相应角位移或者线位移的电磁机械装置。在非超载的情况下,电机的转速,停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角。它具有快速启停能力,在电机的负荷不超过它能提供的动态转矩时,可以通过输入脉冲来控制它在一瞬间的启动或者停止。由于其精确性以及其良好的性能在实际当中得到了广泛的应用。 本文首先介绍了步进电机的分类、技术指标、步进电机的工作原理以及步进电机
https://www.doczj.com/doc/481490427.html,/gykz/2010/0310/article_2772.html 引言 步进电机是一种将电脉冲转化为角位移的执行机构。驱动器接收到一个脉冲信号后,驱动步进电机按设定的方向转动一个固定的角度。首先,通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;其次,通过控制脉冲顿率来控制电机转动的速度和加速度,从而达到涮速的目的。目前,步进电机具有惯量低、定位精度高、无累积误差、控制简单等特点,在机电一体化产品中应用广泛,常用作定位控制和定速控制。步进电机驱动电路常用的芯片有l297和l298组合应用、3977、8435等,这些芯片一般单相驱动电流在2 a左右,无法驱动更大功率电机,限制了其应用范围。本文基于东芝公司2008年推出的步进电机驱动芯片tb6560提出了一种步进电机驱动电路的设计方案 1步进电机驱动电路设计 1.1 tb6560简介 tb6560是东芝公司推出的低功耗、高集成两相混合式步进电机驱动芯片。其主要特点有:内部集成双全桥mosfet驱动;最高耐压40 v,单相输出最大电流3.5 a(峰值);具有整步、1/2、1/8、1/16细分方式;内置温度保护芯片,温度大于150℃时自动断开所有输出;具有过流保护;采用hzip25封装。tb6560步进电机驱动电路主要包括3部分电路:控制信号隔离电路、主电路和自动半流电路。 1.2步进电机控制信号隔离电路 步进电机控制信号隔离电路如图1所示,步进电机控制信号有3个(clk、cw、enable),分别控制电机的转角和速度、电机正反方向以及使能,均须用光耦隔离后与芯片连接。光耦的作用有两个:首先,防止电机干扰和损坏接口板电路;其次,对控制信号进行整形。对clk、cw信号,要选择中速或高速光耦,保证信号耦合后不会发生滞后和畸变而影响电机驱动,且驱动板能满足更高脉冲频率驱动要求。本设计中选择2片6n137高速光耦隔离clk、cw,其信号传输速率可达到10 mhz,1片tlp521普通光耦隔离enable信号。应用时注意:光耦的同向和反向输出接法;光耦的前向和后向电源应该是单独隔离电源,否则不能起到隔离干扰的作用。
步进电机的控制电路和程序 先看一下我们将要使用的51单片机综合学习系统能完成哪些实验与产品开发工作:分别有流水灯,数码管显示,液晶显示,按键开关,蜂鸣器奏乐,继电器控制,IIC总线,SPI总线,PS/2实验,AD模数转换,光耦实验,串口通信,红外线遥控,无线遥控,温度传感,步进电机控制等等。 上图是我们将要使用的51单片机综合学习系统硬件平台,本期实验我们用到了综合系统主机、步进电机,综合系统其它功能模块原理与使用详见前几期《电子制作》杂志及后期连载教程介绍。 步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度(称为“步距角”),它的旋转是以固定的角度一步一步运行的。可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。步进电机可以作为一种控制用的特种电机,利用其没有积累误差(精度为100%)的特点,广泛应用于各种开环控制。 步进电机分类与结构 现在比较常用的步进电机分为三种:反应式步进电机(VR)、永磁式步进电机(PM)、混合式步进电机(HB)。本章节以反应式步进电机为例,介绍其基本原理与应用方法。反应式步进电机可实现大转矩输出,步进角一般为1.5度。反应式步进电机的转子磁路由软磁材料制成,定子上有多相励磁绕组,利用磁导的变化产生转矩。常用小型步进电机的实物如图1 所示。 图1步进电机实物图 图 2 步进电机内部图 步进电机现场应用驱动电路 综合系统使用的是小型步进电机,对电压和电流 要求不是很高,为了说明应用原理,故采用最简单 的驱动电路,目的在于验证步进电机的使用,在正 式工业控制中还需在此基础上改进。一般的驱动电 路可以用图3的形式。 图3 一般驱动电路 在实际应用中一般驱动路数不止一路,用上图的分立电路体积大,很多 场合用现成的集成电路作为多路驱动。常用的小型步进电机驱动电路可以用 ULN2003或ULN2803。本书配套实验板上用的是ULN2003。ULN2003是高压大电流达林顿晶体管阵列系列产品,具有电流增益高、工作电压高、温度范围宽、带负载能力强等特点,适应于各类要求高速大功率驱动的系统。ULN2003A由7组达林顿晶体管阵列和相应的电阻网络以及钳位二极管网络构成,具有同时驱动7组负载的能力,为单片双极型大功率高速集成电路。ULN2003内部结构及等效电路图如图4:
北京工业大学电子课程设计报告 (数电部分) 题目:步进电机
目录 一、设计题目------------------------------------------------------------------------------------------------3 二、设计任务和设计要求 1.设计题目------------------------------------------------------------------------------------------------3 2.设计技术指标及设计要求----------------------------------------------------------------------------3 三、电路设计------------------------------------------------------------------------------------------------4 1.脉冲发生电路-------------------------------------------------------------------------------------------4 2.环形脉冲分配电路-------------------------------------------------------------------------------------5 3.控制电路-------------------------------------------------------------------------------------------------6 4.驱动电路-----------------------------------------------------------------------------------------------10 5.步进电机-----------------------------------------------------------------------------------------------11 四、电路的组装和调试------------------------------------------------------------------------------------12 1.电路的组装----------------------------------------------------------------------------------------------12 2.电路的调试----------------------------------------------------------------------------------------------13 五、收获和体会---------------------------------------------------------------------------------------------14 六、附录------------------------------------------------------------------------------------------------------15 1.列表-------------------------------------------------------------------------------------------------------15 2.参考资料-------------------------------------------------------------------------------------------------15 3.部分芯片管脚图----------------------------------------------------------------------------------------16
步进电机原理及使用说明 一、前言 步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角。这一线性关系的存在,加上步进电机只有周期性的误差而无累积误差等特点。使得在速度、位置等控制领域用步进电机来控制变的非常的简单。 虽然步进电机已被广泛地应用,但步进电机并不能象普通的直流电机,交流电机在常规下使用。它必须由双环形脉冲信号、功率驱动电路等组成控制系统方可使用。因此用好步进电机却非易事,它涉及到机械、电机、电子及计算机等许多专业知识。 步进电机是将电脉冲信号转变为角位移或线位移的一种开环线性执行元件,具有无累积误差、成本低、控制简单特点。产品从相数上分有二、三、四、五相,从步距角上分有0.9°/1.8°、0.36°/0.72°,从规格上分有口42~φ130,从静力矩上分有0.1N?M~40N?M。 签于上述情况,我们决定以广泛的感应子式步进电机为例。叙述其基本工作原理。望能对广大用户在选型、使用、及整机改进时有所帮助。 二、感应子式步进电机工作原理 (一)反应式步进电机原理 由于反应式步进电机工作原理比较简单。下面先叙述三相反应式步进电机原理。 1、结构: 电机转子均匀分布着很多小齿,定子齿有三个励磁绕阻,其几何轴线依次分别与转子齿轴线错开。 0、1/3て、2/3て,(相邻两转子齿轴线间的距离为齿距以て表示),即A与齿1相对齐,B与齿2向右错开1/3て,C与齿3向右错开2/3て,A…与齿5相对齐,(A…就是A,齿5就是齿1)下面是定转子的展开图: 2、旋转: 如A相通电,B,C相不通电时,由于磁场作用,齿1与A对齐,(转子不受任何力以下均同)。 如B相通电,A,C相不通电时,齿2应与B对齐,此时转子向右移过1/3て,此时齿3与C偏移为1/3て,齿4与A偏移(て-1/3て)=2/3て。 如C相通电,A,B相不通电,齿3应与C对齐,此时转子又向右移过1/3て,此时齿4与A偏移为1/3て对齐。 如A相通电,B,C相不通电,齿4与A对齐,转子又向右移过1/3て 这样经过A、B、C、A分别通电状态,齿4(即齿1前一齿)移到A相,电机转子向右转过一个齿距,如果不断地按A,B,C,A……通电,电机就每步(每脉冲)1/3て,向右旋转。如按A,C,B,A……通电,电机就反转。 由此可见:电机的位置和速度由导电次数(脉冲数)和频率成一一对应关系。而方向由导电顺序决定。 不过,出于对力矩、平稳、噪音及减少角度等方面考虑。往往采用A-AB-B-BC-C-CA-A这种导电状态,这样将原来每步1/3て改变为1/6て。甚至于通过二相电流不同的组合,使其1/3て变为1/12て,1/24て,这就是电机细分驱动的基本理论依据。 不难推出:电机定子上有m相励磁绕阻,其轴线分别与转子齿轴线偏移1/m,2/m……(m-1)/m,1。
步进电机驱动电路设计 摘要 随着数字化技术发展,数字控制技术得到了广泛而深入的应用。步进电机是一种将数字信号直接转换成角位移或线位移的控制驱动元件, 具有快速起动和停止的特点。因为步进电动机组成的控制系统结构简单,价格低廉,性能上能满足工业控制的基本要求,所以广泛地应用于手工业自动控制、数控机床、组合机床、机器人、计算机外围设备、照相机,投影仪、数码摄像机、大型望远镜、卫星天线定位系统、医疗器件以及各种可控机械工具等等。直流电机广泛应用于计算机外围设备( 如硬盘、软盘和光盘存储器) 、家电产品、医疗器械和电动车上, 无刷直流电机的转子都普遍使用永磁材料组成的磁钢, 并且在航空、航天、汽车、精密电子等行业也被广泛应用。在电工设备中的应用,除了直流电磁铁(直流继电器、直流接触器等)外,最重要的就是应用在直流旋转电机中。在发电厂里,同步发电机的励磁机、蓄电池的充电机等,都是直流发电机;锅炉给粉机的原动机是直流电动机。此外,在许多工业部门,例如大型轧钢设备、大型精密机床、矿井卷扬机、市内电车、电缆设备要求严格线速度一致的地方等,通常都采用直流电动机作为原动机来拖动工作机械的。直流发电机通常是作为直流电源,向负载输出电能;直流电动机则是作为原动机带动各种生产机械工作,向负载输出机械能。在控制系统中,直流电机还有其它的用途,例如测速电机、伺服电机等。他们都是利用电和磁的相互作用来实现向机械能能的转换。 介绍了步进电机和直流电机原理及其驱动程序控制控制模块,通过AT89S52单片机及脉冲分配器(又称逻辑转换器)L298完成步进电机和直流电机各种运行方式的控制。实现步进电机的正反转速度控制并且显示数据。整个系统采用模块化设计,结构简单、可
步进电机控制 文件编码(008-TTIG-UTITD-GKBTT-PUUTI-WYTUI-8256)
杭州电子科技大学 电子系统设计综合实验 设计报告 实验名称: 步进电机控制 实验序号: 4 小组号: 4A 姓名学号: 指导教师: 黄继业 2015年1月4日 一.引言: 步进电机是机电控制中一种常用的执行机构,它的用途是将电脉冲转化为角位移,通俗地说:当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度(即步进角)。通过控制脉冲个数即可以控制角位移量,从而达到准确定位的目的;同时通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。常见的步进电机分三种:永磁式(PM),反应式(VR)和混合式(HB)。实验中使用的是永磁式步进电机24BY 型,下图是该电机的接线图,从图中可以看出,电机共有四组线圈,四组线圈的一个端点连在一起引出,这样一共有5 根引出线。要使用步进电机转动,只要轮流给各引出端通电即可。将COM 端标识为C,只要AC、A C、BC、B C,轮流加电就能驱动步进电机运转,加电的方式可以有多种,如果将COM 端接正电源,那么只要用开关元件
(如三极管),将A、A 、B、B 轮流接地。 二.实验要求: 1.(基本):控制四相六线式步进电机的转动(四相八拍方式) 2.(基本):显示步进电机的转动圈数、角度和方向 三.(扩展):用非接触的方式实时监测步进电机的工作状态 四.实验器材清单: 名称型号数量 驱动芯片L2981片 霍尔元件cs31441个 二极管80508个 电容100uf、各2个 电阻2K1个 四:实验电路原理图 1:驱动电路原理图: 2:驱动电路工作原理: L298N是SGS公司的产品,内部包含4通道逻辑驱动电路。是一种二相和四相电机的专用驱动器,即内含二个H桥的高电压大电流双全桥式驱动器,接收标准
实习名称:电子设计制作与工艺实习 学生姓名:周文生 学号:201216020134 专业班级:T-1201 指导教师:李文圣 完成时间: 2014年6月13日 报告成绩:
步进电机控制驱动电路设计 摘要: 本设计在根据已有模电、物电知识的基础上,用具有置位,清零功能的JK 触发器74LS76作为主要器件来设计环行分配器,来对555定时器产生的脉冲进行分配,通过功率放大电路来对步进电机进行驱动,并且产生的脉冲的频率可以控制,从而来控制步进电机的速度,环形分配器中具有复位的功能,在对于异常情况可以按复位键来重新工作。 关键字:555定时器脉冲源环行分配器功率放大电路 一、方案论证与比较: (一)脉冲源的方案论证及选择: 方案一:采用555定时器产生脉冲,它工作频率易于改变从而可以控制步进电机的速度并且工作可靠,简单易行。 C2 10uF 图一 555定时器产生的方法 方案二:采用晶振电路来实现,晶振的频率较大,不利于电机的工作,易失步,我们可以利用分频的方法使晶振的频率变小,可以使电机工作稳定,但分频电路较复杂,并且晶振起振需要一定的条件,不好实现。
X1 1kohm 1kohm 图二晶振产生脉冲源电路 综上所述,我们采用方案一来设计脉冲源。 (二)环形分配器的设计: 方案一:采用74ls194通过送入不同的初值来进行移位依此产生正确的值使步进电机进行转动。但此方案的操作较复杂,需要每次工作时都要进行置位,正反转的操作较复杂,这里很早的将此方案放弃。 方案二:使用单独的JK 触发器来分别实现单独的功能。 图三双三拍正转 图四单三拍正转
图五三相六拍正转 利用单独的做,电路图较简单,单具体操作时不方便,并且不利于工程设计。块分的较零散,无法统一。 方案三:利用JK触发器的自己运动时序特性设计,利用卡诺图来进行画简。 图六单,双三拍的电路图 单,双三拍的正,反转主要由键s1,s2的四种状态来决定四种情况的选择。
步进电机的常见故障及工作原理 步进电机是将电脉冲信号转变为角位移或线位移的开环控制元步进电机件。在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度,称为“步距角”,它的旋转是以固定的角度一步一步运行的。可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。 识。 步进电机的分类: 步进电机分永磁式(PM)、反应式(VR)、混合式(HR)三种。永磁式一般为二相,转矩和体积都很小,步距角一般为7.5°或15°;反应式一般为三相,实现大转矩输出,步距角为1.5°;混合式兼具永磁式和反应式的优点,分二相和五相,二相步距角为1.8°,无相步距角为0.72°。 步进电机的工作原理: 步进电机是一种感应电机,它的工作原理是利用电子电路,将直流电变成分时供电的,多相时序控制电流,用这种电流为步进电机供电,步进电机才能正常工作,驱动器就是为步进电机分时供电的,多相时序控制器虽然步进电机已被广泛地应用,但步进电机并不能象普通的直流电机,交流电机在常规下使用。它必须由双环形脉冲信号、功率驱动电路等组成控制系统方可使用。因此用好步进电机却非易事,它涉及到机械、电机、电子及计算机等许多专业知识。 步进电机作为执行元件,是机电一体化的关键产品之一, 广泛应用在各种自动化控制系统中。随着微电子和计算机技术的发展,步进电机的需求量与日俱增,在各个国民经济领域都有应用。 步进电机的主要特性 1 步进电机必须加驱动才可以运转,驱动信号必须为脉冲信号,没有脉冲的时候,步进电机静止,如果加入适当的脉冲信号,就会以一定的角度(称为步角)转动。转动的速度和脉冲的频率成正比。 2 腾龙版步进电机的步进角度为7.5 度,一圈360 度,需要48 个脉冲完成。 3 步进电机具有瞬间启动和急速停止的优越特性。 4 改变脉冲的顺序,可以方便的改变转动的方向。 因此,目前打印机,绘图仪,机器人,等等设备都以步进电机为动力核心。 一、步进电机的基本特点 1、步进电动机工作时每相绕组不是恒定地通电,而是按一定的规律轮流通电。 2、每输入一个脉冲电信号转子转过的角度称为步距角。 3、步进电机可以按特定指令进行角度控制,也可以进行速度控制。角度控制时,每输入一个脉冲,定子绕组就换接一次,输出轴就转过一个角度,其步数与脉冲数一致,输出轴转动的角位移量与输入脉冲成正比。速度控制时,步进电机绕组中送入的是连续脉冲,各相绕组不断地轮流通电,步进电机连续动转,它的转速与脉冲频率成正比。改变通电顺序,即改变定子磁场旋转方向,就可以控制电机正转或是反转。 4、步进电机具有自锁能力。当控制脉冲停止输入,而让最后一个脉冲控制的绕组继续通直流电时,则电机可以保持在固定的位置上,即停在最后一个脉冲控制的角位移的终点位置上,这样,步进电机可以实现停车时转子定位。 二、步进电动机为什么会失步?
《数字电子技术基础》 课程设计报告 题目:步进电机控制电路的设计专业: 年级 学号: 学生姓名: 联系电话: 指导教师: 完成日期: 2014 年 11 月 20 日
摘要 步进电机能接受步进脉冲的控制一步一步地旋转,它是计算机应用项目中的主要执行元件之一,尤其在精确定位场合中得到了广泛的应用。本文介绍的是一种基于单片机的步进电机的系统设计,电机的正转、反转、加速、减速、停止程序,通过电机的驱动芯片74LS194以及相应的按键实现以上功能。本文内容介绍了步进电机以及单片机原理、该系统的硬件电路、程序组成,同时对软、硬件进行了调试,同时介绍了调试过程中出现的问题以及解决问题的方法。该设计具有思路明确、可靠性高、稳定性强等特点,通过调试实现了上述功能。 关键词:步进电机、电机驱动 ABSTRACT Stepper motor can accept the step pulse control rotate one step at a time, and it is an one of the main components of the computer application program, especially in the precise positioning has been widely used in occasions. In this paper is a system design based on single chip microcomputer of stepper motor, the motor of forward, reverse, acceleration, deceleration, stop the program, through the motor drive chip 74 ls194 as well as the corresponding button to achieve the above functions. Content of this article introduces the principle of step motor and single chip microcomputer, the system hardware circuit, program composition, at the same time on the software and hardware debugging, and introduces the debugging process problems and the methods to solve the problem. This design has ideas clearly, high reliability, strong stability, etc, through debugging realized the function. Keywords:Stepper motor, motor drive
课程实习报告 实习名称:电子设计制作与工艺实习 学生姓名:周文生 学号: 2 专业班级:T-1201 指导教师:李文圣 完成时间: 2014年6月13日 报告成绩: 评阅意见: 评阅教师日期
步进电机控制驱动电路设计 摘要: 本设计在根据已有模电、物电知识的基础上,用具有置位,清零功能的JK 触发器74LS76作为主要器件来设计环行分配器,来对555定时器产生的脉冲进行分配,通过功率放大电路来对步进电机进行驱动,并且产生的脉冲的频率可以控制,从而来控制步进电机的速度,环形分配器中具有复位的功能,在对于异常情况可以按复位键来重新工作。 关键字:555定时器脉冲源环行分配器功率放大电路 一、方案论证与比较: (一)脉冲源的方案论证及选择: 方案一:采用555定时器产生脉冲,它工作频率易于改变从而可以控制步进电机的速度并且工作可靠,简单易行。 C2 10uF 图一 555定时器产生的方法 方案二:采用晶振电路来实现,晶振的频率较大,不利于电机的工作,易失步,我们可以利用分频的方法使晶振的频率变小,可以使电机工作稳定,但分频电路较复杂,并且晶振起振需要一定的条件,不好实现。
X1 1k ohm 1k ohm 图二晶振产生脉冲源电路 综上所述,我们采用方案一来设计脉冲源。 (二)环形分配器的设计: 方案一:采用74ls194通过送入不同的初值来进行移位依此产生正确的值使步进电机进行转动。但此方案的操作较复杂,需要每次工作时都要进行置位,正反转的操作较复杂,这里很早的将此方案放弃。 方案二:使用单独的JK 触发器来分别实现单独的功能。 图三双三拍正转 图四单三拍正转
本模块由45BC340C型步进电机及其驱动电路组成。 (一)步进电机: 一般电动机都是连续旋转,而步进电动却是一步一步转动的,故叫步进电动机。每输入一个脉冲信号,该电动机就转过一定的角度(有的步进电动机可以直接输出线位移,称为直线电动机)。因此步进电动机是一种把脉冲变为角度位移(或直线位移)的执行元件。 步进电动机的转子为多极分布,定子上嵌有多相星形连接的控制绕组,由专门电源输入电脉冲信号,每输入一个脉冲信号,步进电动机的转子就前进一步。由于输入的是脉冲信号,输出的角位移是断续的,所以又称为脉冲电动机。 随着数字控制系统的发展,步进电动机的应用将逐渐扩大。 步进电动机的种类很多,按结构可分为反应式和激励式两种;按相数分则可分为单相、两相和多相三种。 图1 反应式步进电动机的结构示意图 图1是反应式步进电动机结构示意图,它的定子具有均匀分布的六个磁极,磁极上绕有绕组。两个相对的磁极组成一组,联法如图所示。 模块中用到的45BC340型步进电机为三相反应式步进电机,下面介绍它单三拍、六拍及双三拍通电方式的基本原理。 1、单三拍通电方式的基本原理 设A相首先通电(B、C两相不通电),产生A-A′轴线方向的磁通,并通过转子形成闭合回路。这时A、A′极就成为电磁铁的N、S极。在磁场的作用下,转子总是力图转到磁阻最小的位置,也就是要转到转子的齿对齐A、A′极的位置(图2a);接着B相通电(A、C 两相不通电),转了便顺时针方向转过30°,它的齿和C、C′极对齐(图2c)。不难理解,当脉冲信号一个一个发来时,如果按A→C→B→A→…的顺序通电,则电机转子便逆时针方向转动。这种通电方式称为单三拍方式。 图2 单三拍通电方式时转子的位置
步进电机控制工作原理 步进电机的名称 步进电机(stepping motor),步进电机(step motor),或者是脉冲电机(pulse motor),其它的如(stepper motor)等……有着各式各样的称呼方式,这些用日本话来表示的时候,就成为阶动电动机,还有,阶动就是一步一步阶段动作的意思,这各用另外一种语言来表示时,就是成为步进驱动的意思,总之,就是输入一个脉冲就会有一定的转角,分配转轴变位的电动机。 步进电机简介: 步进电机是将电脉冲信号转变为角位移或线位移的开环控制组件。 在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角。 这一线性关系的存在,加上步进电机只有周期性的误差而无累积误差等特点。使得在速度、位置等控制领域用步进电机来控制变的非常的简单。 单相步进电机有单路电脉冲驱动,输出功率一般很小,其用途为微小功率驱动。多相步进电机有多相方波脉冲驱动,用途很广。使用多相步进电机时,单路电脉冲信号可先通过脉冲分配器转换为多相脉冲信号,在经功率放大后分别送入步进电机各项绕组。每输入一个脉冲到脉冲分配器,电机各相的通电状态就发生变化,转子会转过一定的角度(称为步距角)。正常情况下,步进电机转过的总角度和输入的脉冲数成正比;连续输入一定频率的脉冲时,电机的转速与输入脉冲的频率保持严格的对应关系,不受电压波动和负载变化的影响。在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角。 步进电机按旋转结构分两大类:1是圆型旋转电机如下图A 2直线型电机,结构就象一个圆型旋转电机被展开一样,如下图B 一,步进电机的种类 现在,在市场上所出现的步进电机有很多种类,依照性能及使用目的等有各自不同的区分使用。
步进电机硬件电路的设计 1、单片机的选择本次设计以CPU选用89C5l作为步进电机的控制芯片.89C51的结构简单并可以在编程器上实现闪烁式的电擦写达几万次以上.使用方便等优点,而且完全兼容MCS5l系列单片机的所有功能。AT89C51是一种带4K字节闪烁可编程可擦除只读存储器(FPEROM—FAlsh ProgrAmmABle And ErAsABle ReAd Only Memory)的低电压,高性能CMOS8位微处理器,俗称单片机。该器件采用ATMEL高密度非易失存储器制造技术制造,与工业标准的MCS-51指令集和输出管脚相兼容。由于将多功能8位CPU和闪烁存储器组合在单个芯片中,ATMEL的AT89C51是一种高效微控制器,为很多嵌入式控制系统提供了一种灵活性高且价廉的方案 1.1单片机的引脚功能: 1)VCC(40):电源+5V。2)VSS(20):接地,也就是GND。3)XTL1(19)和XTL2(18):振荡电路。单片机是一种时序电路,必须有脉冲信号才能工作,在它的内部有一个时钟产生电路,有两种振荡方式,一种是内部振荡方式,只要接上两个电容和一个晶振即可;另一种是外部振荡方式,采用外部振荡方式时,需在XTL2上加外部时钟信号(详细的内容将在以后的课程中专门介绍)。4)PSEN(29):片外ROM选通信号,低电平有
效。5)ALE/PROG(30):地址锁存信号输出端/EPROM 编程脉冲输入端。6)RST/VPD(9):复位信号输入端/备用电源输入端。7)EA/VPP(31):内/外部ROM选择端8)P0口 (39-32):双向I/O口。9.P1口(1-8):准双向通用I/0口。9)P2口(21-28):准双向I/0口。原理图如1所示:图1 AT89C51的引脚图 1.2 主要特性:与MCS-51 兼容4K字节可编程闪烁存储器寿命:1000写/ 擦循环数据保留时间:全静态工作:0Hz-24Hz三级程序存 储器锁定、128*8位内部RAM、32可编程I/O线、两个16位定时器/计数器、5个中断源、可编程串行通道、低功耗的闲置和掉电模式、片内振荡器和时钟电路1) 振荡器特性:XTAL1和XTAL2分别为反向放大器的输入和输出。该反向放大器可以配置为片内振荡器。石晶振荡和陶瓷振荡均可采用。如采用外部时钟源驱动器件,XTAL2应不接。有余输入至内部时钟信号要通过一个二分频触发器,因此对外部时钟信号的脉宽无任何要求,但必须保证脉冲的高低电平要求的宽度。2) 芯片擦除:整个PEROM阵列和三个锁 定位的电擦除可通过正确的控制信号组合,并保持ALE管脚处于低电平10ms 来完成。在芯片擦操作中,代码阵列全被写“1”且在任何非空存储字节被重复编程以前,该操作必须被执行。此外,AT89C51设有稳态逻辑,可以在低到零频率