运动控制系统
课程设计说明书
2013年01月08日
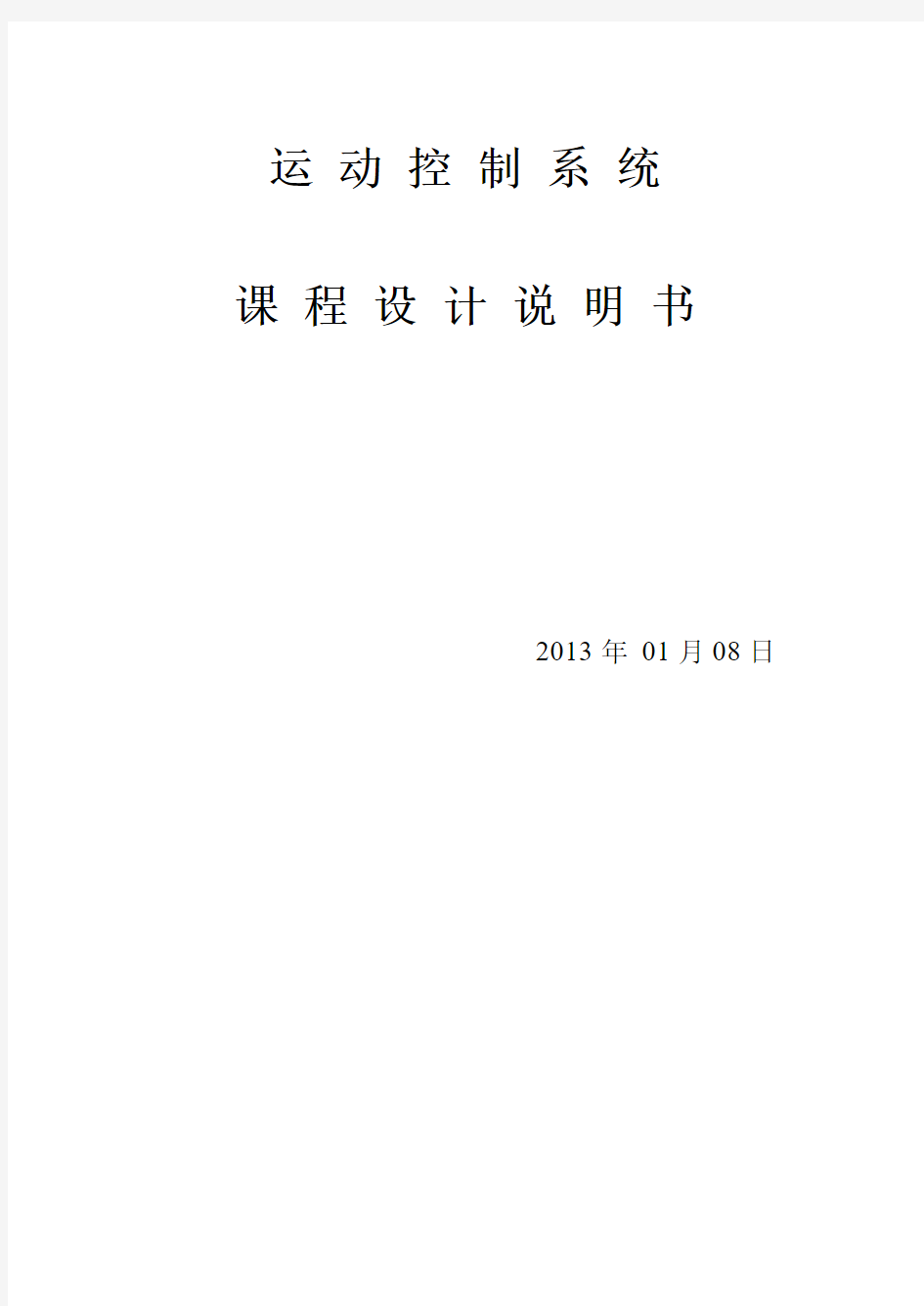
摘要
通用变频器作为交流电动机变频调速用的高新技术产品, 在国民经济的各部门得到了广泛的应用。本文简要地介绍了变频器的工作原理, 并结合现场运用, 以变频器与可编程控制器组成的节能控制系统为例, 揭示了它在生产自动化、节能化方向的应用前景。同时由于变频器在电气传动控制方面得到了越来越广泛的应用,但如何使用各种不同种类的变频是很多电气工程师面临的问题。通过对变频器的发展历史、分类和工作原理的介绍以及对实际应用中应注意的问题作出了总结归纳,对选择和安装、调试变频器时有一定的借鉴意义。
关键词:变频器;原理;应用
Abstract
Currency transducer, as a new technology product which is used to adjust speed for alternating current to elect romotor, is widely used to various department in national economy. This paper introduces the work principle, points out the apply foreground in automatic production and energy saving a san example for energy saving control system consisted of transducer and programme controller .Meanwhile, frequency inverter has been more widely used in electric drive, but how to use different types of inverter is a problem faced by lot of electrical engineers. Classification and working principle of frequency inverter as well as the summarizing of issues to be aware in practical application of frequency converter, this article therefore have a certain reference on the selection and installation, commissioning of frequency inverter. Key words: Frequency converter ;Principle ;Application
第1章绪论
课程设计背景及意义
电力电子器件的自关断化、模块化,变流电路开关模式的高频化和控制手段的全数字化促进了变频电源装置的小型化、多功能化、高性能化。尤其是控制手段的全数字化,利用了微型计算机的巨大的信息处理能力,其软件功能不断强化,使变频装置的灵活性和适应性不断增强。目前中小容量的一般用途的变频器已经实现了通用化。采用大功率自关断开关器件(GTO、BJT、IGBT)作为主开关器件的正弦脉宽调制式(SPWM)变频器,已成为通用变频器的主流。在现代工业自动化中, 通用变频器充当了极为重要的角色。它是计算机技术、现代控制技术和网络技术的有机结合, 具有调速精度高、动态响应快、运行效率高、功率因数高、操作方便、节能效果显著等一系列优点。它已成为当今改造传统工业、改造工艺流程、提高生产过程自动化水平、提高产品质量、推动技术进步的主要手段之一, 普遍应用于风机、水泵、生产线、机床、纺织机械、塑料机械、造纸机械、冶炼机械等。
随着电力电子器件和数字控制手段的发展, 变频器也不断更新换代, 不断向小型化、多功能化、高性能化方向发展。鉴于直流拖动具有优越的调速性能,早期的调速系统均采用直流调速系统,直流调速特点是力矩控制精确,调速的动静态性能好,但直流电机难以维护。随着电力电子技术的发展和变频器的推出,交流调速技术得以实现。与直流调速系统相较,调速性能已经相差无几了,但维护成本却大大降低。用交流调速系统取代直流系统的趋势越来越明显,交流调速系统已经成为当前调速控制的主要发展方向。
第2章通用变频器特点及工作原理
2.1、通用变频器产品特点
低频转矩输出180% ,低频运行特性良好。
输出频率最大600Hz ,可控制高速电机 。
加速、减速、动转中失速防止等保护功能 。
电机动态参数自动识别功能,保证系统的稳定性和精确性 。
高速停机时响应快 。
丰富灵活的输入、输出接口和控制方式,通用性强 。
采用SMT 全贴装生产及三防漆处理工艺,产品稳定度高 。
全系列采用IGBT 功率器件,确保品质的高质量。
全方位的侦测保护功能(过压、欠压、过载)瞬间停电再起动 。
2.2 变频器的工作原理
2.2.1 变频器的组成
变频器一般由整流、中间直流环节、逆变和控制4 个部分组成。
1)整流
整流电路的功能是把交流电源转换成直流电源。一般采用三相桥式不可控整流器。
2)中间直流环节
中间直流环节功能为滤波、直流储能和缓冲无功功率。
3)控制
控制回路主要功能为运算,电压、电流检测,驱动电路器件的开断,速度检测,电路保护等。
4)逆变
逆变是将直流功率转换为交流功率,通过控制回路运算以确定时间,使6个开关器件导通和关断,从而模拟出3 相正弦波交流电输出。
2.2.2 U/f 控制
所谓U/f 控制,指U/f 比值基本保持恒定,即当变频器的输出频率变化时变频器的输出电压也会发生相应的改变,两者的比值始终保持恒定。根据电机拖动理论对异步电机进行调速控制时,异步电机的气隙磁通是由定、转子合成磁动生的,异步电机的气隙磁通应保持额定值不变。若磁通太弱,铁心利用不充分,同样的转子电流下,电磁转矩小,电动机的负载能力下降;磁通太强,则处于过磁状态,使励磁电流增大,易使电机过热。根据磁通公式:fWK πφ2E
=
式中,Φ为每极气隙磁通;E 为感应电势;f 为定子电源频率;WK 为每相有效串联匝数。可以看出为了保持气隙磁通额定值不变,故E / f =恒定值;而感应电势是不能直接检测,因此又根据公式E=U —I*Z 。
其中U 为定子电压;I 为定子电流;Z 为定子阻抗。
在异步电机高速运行时I*Z 分量值占的比重小因此可以忽略即E ≈U,这样就变成了U/f =恒定值。U/f 控制是所有变频控制遵循的基本原则。
现在许多变频器是根据U/f =恒定值原理进行变频控制的。但由于电机在低速运行时I * Z 分量值占的比重就不容忽略了,因此电机在低速运行时气隙磁通会减弱,导致电机转矩下降。因此需要进行转矩补偿即在低频时把U / f 增大。U / f =恒定值控制方式其特点是控制电路结构简单、成本较低,机械特性硬度也较好,能够满足一般传动的平滑调速要求,已在产业的各个领域得到广泛应用。但是,这种控制方式在低频时,由于输出电压较低,转矩受定子电阻压降的影响比较显著,使输出最大转矩减小。另外,由于控制模型是从异步电机稳态等效电路和稳态转矩公式推导出的稳态值控制,完全不考虑动态过渡过程,其机械特性终究没有直流电动机硬,动态转矩能力和静态调速性能都还不尽如人意,且系统性能不高、控制曲线会随负载的变化而变化,转矩响应慢、电机转矩利用率不高,低速时因定子电阻和逆变器死区效应的存在而性能下降,稳定性变差等。因此人们又研究出矢量控制变频调速。
2.2.3 转差频率控制
转差频率控制是一种直接控制转矩的控制方式,它是建立在U/f 控制的基础上。 根据转矩公式:])2([4mp
2L f r f T s s
ππ+=
式中,T 为转矩;m 为定子绕组相数;p 为异步电机的极对数;f s 为转差频率;r 为转子电阻;L 为转子漏感。
在异步电机稳态运行时转差频率f s 较小(2%~10%),在E/f 即U/f 为恒定值时转矩与转差频率即转差率成正比。按照知道异步电动机的实际转速对应的电源频率,并根据希望得到的转矩来调节变频器的输出频率,就可以使电动机具有对应的输出转矩。
这种控制方式,在控制系统中需要安装速度传感器,有时还加有电流反馈,对频率和电流进行控制,因此,这是一种闭环控制方式,可以使变频器具有良好的稳定性,控制精度得到提高,并对急速的加减速和负载变动有良好的响应特性。
2.2.4 矢量控制
上两种控制方式基本解决了异步电动机平滑调速问题,但当动、静态性能有更高要求特别是直流调速系统比较时还是有些差距,因此又研究出了基于磁场定向原理的矢量控制技术。矢量控制实现的基本原理是通过测量和控制异步电动机定子电流矢量,根据磁场定向原理分别对异步电动机的励磁电流和转矩电流进行控制,从而达到控制异步电动机转矩的目的。也就是是将异步电动机的定子电流矢量分解为产生磁场的电流分量( 励磁
电流) 和产生转矩的电流分量( 转矩电流) 两个独立的分量并分别加以控制,即控制定子电流矢量。具体做法是将异步电动机在三相坐标系下的定子电流I a、I b、I c、通过三相-二相变换,等效成两相静止坐标系下的交流电流Ia1Ib1,再通过按转子磁场定向旋转变换,等效成同步旋转坐标系下的直流电流I m 1 、I t 1(Im1 相当于直流电动机的励磁电流;It1 相当于与转矩成正比的电枢电流),然后模仿直流电动机的控制方法,求得直流电动机的控制量,经过相应的坐标反变换,实现对异步电动机的控制。矢量控制方式又有基于转差频率控制的矢量控制方式、无速度传感器矢量控制方式和有速度传感器的矢量控制方式等。
基于转差频率控制的矢量控制方式同样是在进行U/f =恒定控制的基础上,通过检测异步电动机的实际速度n,并得到对应的控制频率f,然后根据希望得到的转矩,分别控制定子电流矢量及两个分量间的相位,对变频器的输出频率f 进行控制的。基于转差频率控制的矢量控制方式的最大特点是,可以消除动态过程中转矩电流的波动,从而提高了通用变频器的动态性能。早期的矢量控制通用变频器基本上都是采用的基于转差频率控制的矢量控制方式。
无速度传感器的矢量控制方式是基于磁场定向控制理论发展而来的。实现精确的磁场定向矢量控制需要在异步电动机内安装磁通检测装置,要在异步电动机内安装磁通检测装置是很困难的,但人们发现,即使不在异步电动机中直接安装磁通检测装置,也可以在通用变频器内部得到与磁通相应的量,并由此得到了所谓的无速度传感器的矢量控制方式。它的基本控制思想是根据输入的电动机的铭牌参数,按照转矩计算公式分别对作为基本控制量的励磁电流(或者磁通)和转矩电流进行检测,并通过控制电动机定子绕组上的电压的频率使励磁电流(或者磁通)和转矩电流的指令值和检测值达到一致,并输出转矩,从而实现矢量控制。
目前新型矢量控制通用变频器中已经具备异步电动机参数自动检测、自动辨识、自适应功能,带有这种功能的通用变频器在驱动异步电动机进行正常运转之前可以自动地对异步电动机的参数进行辨识,并根据辨识结果调整控制算法中的有关参数,从而对普通的异步电动机进行有效的矢量控制。
2.2.5 直接转矩控制
直接转矩控制的特征是控制定子磁链,是直接在定子静止坐标系下,以空间矢量概念,通过检测到的定子电压、电流,直接在定子坐标系下计算与控制电动机的磁链和转矩,获得转矩的高动态性能。它不需要将交流电动机化成等效直流电动机,因而省去了矢量变换中的许多复杂计算,它也不需要模仿直流电动机的控制,从而也不需要为解耦而简化交流电动机的数学模型,而只需关心电磁转矩的大小,因此控制上对除定子电阻外的所有电机参数变化鲁棒性良好,所引入的定子磁链观测器能很容易得到磁链模型,并方便地估算出同步速度信息,同时也很容易得到转矩模型,磁
链模型和转矩模型就构成了完整的电动机模型,因而能方便地实现无速度传感器控制,如果在系统中再设置转速调节器,即可进一步得到高性能动态转矩控制了。
2.2.6 矢量控制与直接转矩控制比较
与矢量控制相比直接转矩控制具有结构简单,转矩响应速度快、对参数变化鲁棒性强的优点。直接转矩控制的主要缺点是速度精度较差和在低速时转矩脉动大。
2.3 使用变频器应注意的问题
(1)选择变频器时应注意负载类型,负载类型主要分为恒转矩负载如转炉倾动、皮带机等,降转矩负载如风机、水泵等,恒功率负载如机械加工车床、卷取机等,选用对应负载类型匹配的变频器才能满足控制要求。(2)应根据负载额定电流而不能简单地通过负载功率选择变频器。因为变频器的标注适配功率是对应4 级电机的,同功率6 级以上的电机和变级电机等电机的额定电流大于4 级电机。
(3)变频器如果要长电缆运行时,此时要采取措施抑制长电缆对地耦合电容的影响,避免变频器出力不足,所以在这样情况下,变频器容量要放大一档或者在变频器的输出端安装输出电抗器。
(4)对于一些特殊的应用场合,如高温,高海拔,此时会引起变频器的降容,变频器容量要放大一档。
(5)变频器和电机的距离应该尽量的短。这样减小了电缆的对地电容,减少干扰的发射源。
(6)为了防止变频器的谐波对其它电子类设备的信号干扰,一般要求变频器到电机选用屏蔽电缆或者全部用穿金属线管屏蔽,但采用屏蔽电缆或穿线管时容易增大对地电容从而导致变频器报故障,建议此时在变频器加装输出交流电抗器。
(7)变频器内部是大功率的电子元件,极易受到工作温度的影响,产品一般要求为0 ~5 5 ℃,但为了保证工作安全、可靠,使用时应考虑留有余地,最好控制在4 0 ℃以下。不允许把发热元件或易发热的元件紧靠变频器的底部安装。
(8)温度太高且温度变化较大或环境较潮湿时,变频器内部易出现结露现象,其绝缘性能就会大大降低,甚至可能引发短路事故。必要时,必须在箱中增加干燥剂和加热器。
(9)避免变频器振动和冲击。装有变频器的控制柜受到机械振动和冲击时,会引起电气接触不良。
(10)采用变频驱动时,尽量选用专用变频电机,否则变频产生的高次谐波会降低电机寿命。
(11)变频器在控制绕线型异步电机时由于绕线型异步电机绕阻阻抗小,容易发生由于谐波电流而引起的过流现象,所以在选择变频器时应注意将
变频器容量放大一档。
(12)采用1 台变频器拖多台电机时变频器的控制方式只能是U / f 控制方式,并且由于无法实现单个电机的过流和过载保护,需在每台电机侧加装热继电器来实现保护。
(13)如果在变频器的输出侧加装交流接触器,应注意在停止时应先停止变频器后再断开接触器,否则易产生很大的冲击电流,使变频器过流跳闸,严重时会损坏变频器。
(14)变频器能耗制动时制动电阻值应根据机械特性和制动时间进行选择,否则制动电阻过小时,可能产生大电流导致制动单元烧毁,制动电阻过大时可能导致制动电能无法完全释放从而产生高电压使直流单元电容被击。
第3章 变频器的变频调速
3.1 基本控制方式
根据电机学理论可知, 交流电动机的转速公式为:
)1(160s p
f n -= (1) 式中1f :定子供电频率;p:极对数; s :转差率。
由式(1)可知, 若均匀地改变定子供电频率1f ,则可以平滑地改变电动机转速。然而,只调节
1f 是不行的, 因为
1E = 4.441f 1N 1N κ m 1U ≈ ( 2)
式中: 1E : 定子每相由气隙磁通感应的电动势的均方根值, 1N :定子相绕组有效匝数;1N κ:与电动机绕组结构有关的常数; m : 每极磁通量;
1U :定子相电压。
当定子电压1U 不变时, m 与1f 成反比, 1f 的升高或降低, 会导致磁
通m 的减小或增大, 从而使电动机最大转矩减小, 严重时将导致电动机堵转, 或者使磁路饱和, 铁耗急剧增加。为此, 在调节电源频率的同时, 要调节电压的大小, 以维持磁通的恒定,使最大转矩不变。根据1U 和1f 不同的比例关系,变频器有以下几种调速方式。
3.1.1 恒比例控制方式
这种控制方式是在调频的同时调节电压, 维持1U /1f = const (恒
值) 。当频率较高时, 定子电阻压降可忽略不计, 这时有1U ≈ 1E , m=1111f 44.41
E k N N ? 1111f 44.41U k N N ≈= const (恒值) , 磁通近似不变。
根据异步电动机的转矩表达式
22cos φ???=I m C T m (3)
式中: m C : 电磁转矩系数;2I :转子电流;2cos φ: 转子功率因数。当
转子电流2I 额定, m = const ( 恒值) 时, 电动机的转矩不变, 因此, 这
种恒比例控制方式属于恒转矩调速性质。但当频率较低时, 定子电阻压降不可忽略, 1E 与1U 相差较大, 即使1U /1f = const ,1E /1f = const 也不
再近似为常数, 最大转矩将随频率f 1 的降低而减小, 起动转矩也减小, 甚至不能带动负载。所以, 恒比例控制方式只适用于调整范围不大( 即1f 不会进入低频段) , 或者转矩随转速下降而减小的负载( 如风机、水泵) 。
对于宽调速范围的恒转矩负载, 不能采用恒比例控制方式。
3.1.2 恒磁控制方式
由式( 3) 可知, 要在整个调速范围内实现恒磁通控制, 必须按(4) 来进行控制。
1E /1f = const (4)
式( 4) 是维持恒磁通, 即维持最大转矩变频调速的协助控制条件。但是, 由于电动机的感应电动势1E 难以测定和控制,所以实际应用中采用
一种近似的恒磁通控制方法, 具体做法是: 当频率较高时,采用恒比例控制方式, 当频率较低时,引入低频补偿,也就是通过控制环节,适当提高变频电源输出电压,以补偿低频时定子电阻上的压降, 维持磁通不变, 实现恒转矩控制。
3.1.3 恒功率控制方式
当调速转速超过额定转速时, 要求1f >1N f (额定频率) ,若仍按恒磁通
控制方式,则会使1U 超过N 1U (额定电压),这是不允许出现的。这时必须改
用恒功率控制方式, 即当1f >1N f 时, 保持1U =N 1U ,不进行电压的协调控
制。随着频率的升高,气隙磁通会小于额定磁通,导致转矩减小,但频率升高, 速度增加。由975P Tn
可知,当T 减小的倍数和n 增加的倍数相等时, P 维持
不变, 故称这种方式为恒功率控制方式。不过T 和n 不是严格地等比例增减, 这只能说是一种近似的恒功率控制方式。如果要准确地维持恒功率调速, 必须按式(5)的原则
11
f U =const ( 5)
进行电压、频率的协调控制, 与恒比例控制比较,在采用恒功率控制时, 随着1f 的升高, 要求1U 升高得相对小一些,恒功率控制方式的特点是输出
功率不变,它适用于负载随转速的升高而变轻的场合。
3.1.4 恒电流控制方式
在变频调速时,保持三相异步电动机定子电流1I 为恒值,这种控制方式
叫恒流控制。1I 的恒定可通过电流调节器的闭环控制来实现这种系统不仅
安全可靠,而且具有良好的工作特性。恒流控制和恒磁通控制的机械特性基本相同,均具有恒转矩调速性质。变频时,对最大转矩大小影响不大。但由于恒流控制限制了1I ,所以恒流控制时的最大转矩m T 要比恒磁通控制时小
得多,且过载能力小,因此,这种方式只适用于负载变化不大的场合。
3.2 控制方式的选择
为了使异步电动机变频调速时取得最好的技术和经济效果, 不同类型的负载应根据具体要求选择不同的控制方式。控制方式应满足的条件是:
(1) 电动机的过载能力不低于额定值, 以防堵转。
(2) 每极磁通不应超过额定值, 以免磁路饱和。
(3) 电流不应超过额定值, 以免引起电动机过热。
(4) 电动机的损耗最小。
(5) 充分利用电动机的容量, 尽可能使磁能保持额定值, 以充分利用铁心; 尽可能使电流保持额定值, 以充分利用绕组导线; 尽可能使功率因数保持额定值, 以免降低电动机出力。
以上条件中, (1) (2) (3) 是技术条件, (4) (5) 是经济条件。
3.2.1 额定频率以下控制方式的选择
工程实际中常用的负载有: 转速平方型负载、恒功率型负载和恒转矩型负载。负载类型不同, 调速范围不同, 所要求的控制方式也不一样, 下面按负载的选择类型分别讲述。
(1)转速平方型负载。这类负载的性质是转矩和转速的平方成正比, 如风机、水泵类负载。在负载重、电流大、铜耗大的场合, 采用恒磁通控制方式较合适, 对于轻载的场合采用恒电流控制方式。
(2) 恒功率型负载。这类负载的性质是转矩与转速成反比, 可采用恒磁通控制方式和恒功率控制方式。
(3) 恒转矩型负载。在电动机满载的条件下,恒转矩型负载只有一种控制方式, 即恒磁通控制方式。这种方式能同时保证磁通不变、电流不变以及过载倍数不变。其它控制方式则不能满足。
3.2.2 额定频率以上控制方式的选择
在额定频率以上,负载皆为恒功率负载,一般采用恒压控制方式,即近似恒功率控制方式。这种控制方式在保持电压不变的条件下, 并不能使电动机得到充分利用,同时高速时有堵转的危险。故只有在负载较轻、调速范围较小的场合才能应用。
3.3 变频器额定值
3.3.1 输入侧的额定值
中小容量通用变频器输入侧的额定值主要指电压和相数。在我国,输入电压的额定值( 指线电压)有3相380 V 、3相220V(主要是进口变频器)和单相220V(主要是家用电器中的小容量变频器)三种,此外,输入侧电源电压的频率一般规定为工频50Hz 或60Hz 。
3.3.2 输出侧的额定值
(1) 输出电压UN 。在大多数情况下, 它是输出频率等于电动机额定频率时的输出电压值。通常,输出电压的额定值总是和输入电压相等。
(2) 输出电流I N 。指允许长时间输出的最大电流, 是用户选择变频器时的主要依拒。
(3) 输出容量N S 。N S 取决于N U 和N I 的乘积。N S = 3N U N I
(4) 配用电动机容量N P 。对于变频器说明书中规定的配用电动机, 其容量
说明如下:
它是根据( 6) 式估量的结果:
N P = M M N
S φηcos ?? ( 6) 式中: M η
:电动机的效率;M φ
cos : 电动机的功率因数。 由于电动机容量的标称值是统一的, 而M η
和M φcos 值不一致, 所以
配用电动机容量相同的变频器,品牌不同,其输出容量常常不相同。说明书中的配用电动机容量,仅对长期连续负载才是适合的, 对于各种变动负载, 则不适用。
( 5) 过载能力。变频器的过载能力是指允许其输出电流超过额定电流的能力, 大多数变频器都规定为150% N I /1 min 。
第四章变频器在风机节能中的应用
风机、鼓风机等送风机应用得较普遍,其功率大, 轴功率与转速的立方成正比, 在这类调速系统中, 只要改变变频器的运行模式, 即可节约大量能源。现对其具体应用加以分析:
采用U/ F 控制方式的变频器, 在输出某一频率, 负载一定时, 存在着一个最佳工作点。负载变化时, 最佳工作点也转移。针对这一特点, 大部份变频器设置了节能运行的功能, 选择此功能, 变频器能够自动搜索最佳工作点, 使电动总是在最佳工作点上运行, 从而实现节能的目的。
图1 送风机应用模式
送风机为大惯性负载,模式图1中的大容量电机的频繁起动电流所产生的电磁力,对电机绝缘材料具有很大的破坏力。对于这种设备, 可以采用变
频器工频电网切换控制方式, 即用变频器将电动机从零加速到额定转速, 在额定转速下, 使变频器的输出电压同工频电网的相位、频率等一致后, 进行切换。采用这种方式, 加速时电动机的转差频率可以限制在很小的范围, 所以电源容量变小, 起动时的损耗和电磁力也变小。另外, 切换时变频器与工频电网为同步切换, 因此冲击转矩小, 可以频繁加减速。送风机负载采用变频器进行节能运行控制, 可以取得很明显的节能效果。
4.1 工频与变频的切换运行
在以上的送风机调速系统中, 需要选择“工频运行”或“变频运行”, 即由变频器运行自动切换到工频电网上, 或由工频电网运行自动切换到变频器运行,切换期间, 电动机不停止运转。切换控制的主电路如图2 所示。图中KM1 用于将电源接至变频器的输入端;KM2 用于将变频器的输出端接至电动机;KM3 用于将工频电源直接接至电动机。此外, 由于在工频运行时, 变频器不能对电动机提供过载保护。同时, 由于变频器输出端不允许与电源直接相连, 因此, 接触器KM2 与KM3 之间必须有互锁保护, 防止两个接触器同时接通。
图2 切换控制的主电路图
本设计采用的是PLC(可编程控制器) 控制的切换电路,如图3 所示其中PLC 为日本三菱公司FX 系列产品。图中旋钮开关SA1 用于控制PLC 的运行; SA2 用于控制“工频运行”和“变频运行”的切换;SB用于变频器发生故障后的复位;其他按钮开关:“工频运行”时,SF1 为中间继电器,KA1起动并自锁按钮, 电动机处于“工频运行”状态;按下停止按钮ST1, 中间继电器KA1 和接触器KM3 的线圈均断电, 电动机停止运行。“变频运行”时,SF1 为中间继电器KA1 起动并自锁按钮,接触器KM2也得电,将电动机接至变频器的输出端, KM2 得电后,KM1 线圈也得电, 将工频电源接到变频
器的输入端, 这样可允许电动机起动。按下SF2, 中间继电器KA2 动作, 变频器的FWD 端与CM 端接通, 电动机开始升速进入“变频运行”状态。KA2 线圈得电后,停止按钮ST1将失去作用,可防止直接通过切断变频器电源使电
动机停机。变频器正常运行时,按下ST2, KA2 断电,变频器的FWD 端与CM
端之间断开, 电动机减速停止。而对于KM2 和KM3 接触器, 既有“硬件互锁”, 也有PLC 控制程序中的“软件互锁”。
图3 PLC 控制的切换电路
切换控制的PLC程序梯形图如图4所示。程序由5段组成(为说明方便而划分),即A、B、C、D、E段。第一段为工频运行段(A段)。先将选择开关SA2 旋至“工频运行”位置,使PLC的输入继电器X0动作并自保持;按下起动按钮SF1,输入继电器X2动作,输入Y2得电并保持,从而使接触器KM3动作,电动机在工频电压下起动并运行。按下停止按钮ST1,输入继电器X3动作,使输出Y2复位,接触器KM3失电,电动机停止运行。如果电动机出现过载情况,热继电器KR 动作,相应触点闭合, 即输入继电器X7 动作, 输出Y2, 接触器KM3 复位,电动机停止运行。
第二段为变频通电段(B段)。先将选择开关SA2 旋至“变频运行”位
图4 切换控制PLC 梯形图
置, 使PLC 的输入继电器X1得电(动作)。当按下起动按钮SF1,输入继电器
X2动作,使输出继电器Y1得电并保持。这样接触器KM2得电,电动机接到变频器的输出端;同时,PLC的输出Y0也得电,接触器KM1 动作,变频器电源接通。当按下停止按钮ST1时,输入继电器X3得电,在输出Y3未动作或已复位(即Y3=0)的情况下,使输出继电器Y1复位。接触器KM2 也复位,以断开电动机与变频器之间的回路(主电路)。同时, 输出Y0 与接触器KM1 相继复位, 接触器的电源被断开。
第三段为变频运行段( C段)。按下按钮SF2,输入继电器X4得电,在Y0
得电的前提下,输出继电器Y3得电并保持,继电器KA动作,变频器的FWD接通, 电动机开始升速并运行,进入变频运行阶段。同时,Y3的常闭触点使“停止
按钮”ST1暂时不能起作用(该回路被Y3的触点断开) ,这样设计的目的是为了防止在电动机运行状态下,直接切断变频器的电源。按下ST2,输入继电器X5得电,输出继电器Y3复位,继电器KA失电,变频器的FWD断开电动机开始降
速并停止。
第四段为变频器跳闸段(D段)。如果变频器因某种故障而跳闸, 变频器的“30B-30A”闭合, PLC的输入继电器X10动作。它一方面使Y1和Y3复位,
使输出继电器Y0、接触器KM2和KM1、继电器KA相继复位,变频器停止工作;另一方面, 输出继电器Y4 和Y5 动作并保持, 蜂鸣器HA和指示灯HL 进行
声光报警。在Y1已经复位后,定时器T1开始计时,其延时闭合的常开触点闭
合后, 输出继电器Y2动作并保持, 电动机进入工频运行状态。
第五段为故障处理段(E段)。报警出现后, 将SA 旋至“工频运行”位置, 此时,输入继电器X0 动作, 使变频器转入工频运行方式;同时, Y4
和Y5 复位, 声光报警停止。当变频器的故障处理完毕后, 重新通电后, 首先按下复位按钮SB, 使X6动作, Y6得电, 变频器的RESET接通, 使变频器
的故障状态复位。
4.2 大风机变频器在运行中的节能效果
在工业企业中需要大量使用风机,以往压力的调节是通过调节管道上
的阀门开度来实现,结果是造成电能的大量浪费。由于与之配套的电动机功率都比实际需要的大, 所以电动机也不是在额定功率下运行,造成浪费。
金冶厂现有大小两台鼓风炉, 分别由75 kW 和37 kW 的风机进行鼓风。在安装变频器之前,风量大小由人工调节进风阀门;安装变频器后,则由变
频器调节风机电机转速从而调节风量,大大节约了电力能源。以75 kW 风机电机为例, 变频前为工频50Hz下工作, 功率因数0.7, 每月按22天, 每天
20小时计,一月耗能为: 22*20*75*0.7= 23 100 kW h,采用变频器调节后频率仅为25Hz左右, 耗能可减少一半左右, 可见节约电能的效果。
[ 参考文献]
[1]阮毅,陈伯时.电力拖动自动控制系统—运动控制系统 [M]. 北京:
机械工业出版社,2012
[2]王树青,先进控制技术及其应用[M],科学出版社,2001
[3]王卫兵.PLC系统通信 [M].北京:机械工业出版社,2009.
[4]吴勤勤.控制仪表及装置[M].北京:化学工业出版社,2004.
[5]孙洪程.过程控制工程设计[M] .北京:化学工业出版社,2001.
[6]孙洪程等编,过程控制工程设计[M],化学工业出版社,2001
[7] 刘美俊. 通用变频器应用技术[M] . 福州: 福建科学技术出版社出版, 2004.
[8]王树.变频调速系统设计与应用[M].北京: 机械工业出版社,2005.
[9]何超.交流变频调速技术[M].北京: 北京航空航天大学出版社,2005.
[10]张斗章.变频调速技术与系统应用[M].北京: 机械工业出版社, 2005.
H a r b i n I n s t i t u t e o f T e c h n o l o g y 课程设计说明书(论文) 课程名称:自动控制理论课程设计 设计题目:直线一级倒立摆控制器设计 院系:电气学院电气工程系 班级: 设计者: 学号: 指导教师: 设计时间:2016.6.6-2016.6.19 手机: 工业大学教务处
*注:此任务书由课程设计指导教师填写。
直线一级倒立摆控制器设计 摘要:采用牛顿—欧拉方法建立了直线一级倒立摆系统的数学模型。采用MATLAB 分析了系统开环时倒立摆的不稳定性,运用根轨迹法设计了控制器,增加了系统的零极点以保证系统稳定。采用固高科技所提供的控制器程序在MATLAB中进行仿真分析,将电脑与倒立摆连接进行实时控制。在MATLAB中分析了系统的动态响应与稳态指标,检验了自动控制理论的正确性和实用性。 0.引言 摆是进行控制理论研究的典型实验平台,可以分为倒立摆和顺摆。许多抽象的控制理论概念如系统稳定性、可控性和系统抗干扰能力等,都可以通过倒立摆系统实验直观的表现出来,通过倒立摆系统实验来验证我们所学的控制理论和算法,非常的直观、简便,在轻松的实验中对所学课程加深了理解。由于倒立摆系统本身所具有的高阶次、不稳定、多变量、非线性和强耦合特性,许多现代控制理论的研究人员一直将它视为典型的研究对象,不断从中发掘出新的控制策略和控制方法。 本次课程设计中以一阶倒立摆为被控对象,了解了用古典控制理论设计控制器(如PID控制器)的设计方法和用现代控制理论设计控制器(极点配置)的设计方法,掌握MATLAB仿真软件的使用方法及控制系统的调试方法。 1.系统建模 一级倒立摆系统结构示意图和系统框图如下。其基本的工作过程是光电码盘1采集伺服小车的速度、位移信号并反馈给伺服和运动控制卡,光电码盘2采集摆杆的角度、角速度信号并反馈给运动控制卡,计算机从运动控制卡中读取实时数据,确定控制决策(小车运动方向、移动速度、加速度等),并由运动控制卡来实现该控制决策,产生相应的控制量,使电机转动,通过皮带带动小车运动从而保持摆杆平衡。
《运动控制系统》课程设计报告 时间 2014.10 _ 学院自动化 _ 专业班级自1103 _ 姓名曹俊博 __ 学号 41151093 指导教师潘月斗 ___ 成绩 _______
摘 要 本课程设计从直流电动机原理入手,建立V-M双闭环直流调速系统,设计双闭环直流调速系统的ACR和ASR结构,其中主回路采用晶闸管三相桥式全控整流电路供电,触发器采用KJ004触发电路,系统无静差;符合电流超调量σi≤5%;空载启动到额定转速超调量σn≤10%。并详细分析系统各部分原理及其静态和动态性能,且利用Simulink对系统进行各种参数给定下的仿真。 关键词:双闭环;直流调速;无静差;仿真 Abstract This course is designed from DC motor, establish the principles of V-M double closed loop DC speed control system design, the double closed loop dc speed control system and the structure, including ACR ASR the main loop thyristor three-phase bridge type all control the power supply and trigger the rectifier circuit KJ004 trigger circuit, the system without the static poor; Accord with current overshoots sigma I 5% or less; No-load start to the rated speed overshoot sigma n 10% or less. And detailed analysis of the system principle and the static and dynamic performance, and the system of simulink to various parameters set simulation. Key Words:double closed loop;DC speed control system;without the static poor;simulation
JIANG SU UNIVERSITY 机电系统综合课程设计 ——模块化生产教学系统的PLC控制系统设计 学院:机械学院 班级:机械 (卓越14002) 姓名:张文飞 学号: 3140301171 指导教师:毛卫平 2017年 6月
目录 一: MPS系统的第4站PLC控制设计 (3) 1.1第四站组成及结构 (3) 1.2 气动回路图 (3) 1.3 PLC的I/O分配表,I/O接线图(1、3、6站电气线路图) (4) 1.4 顺序流程图&梯形图 (5) 1.5 触摸屏控制画面及说明,控制、信息软元件地址表 (10) 1.6 组态王控制画面及说明 (13) 二: MPS系统的两站联网PLC控制设计 (14) 2.1 PLC和PLC之间联网通信的顺序流程图(两站)&从站梯形图 (14) 2.2 通讯软元件地址表 (14) 三:调试过程中遇到的问题及解决方法 (18) 四:设计的收获和体会 (19) 五:参考文献 (20)
一:MPS系统的第4站PLC控制设计 1.1第四站组成及结构: 由吸盘机械手、上下摆臂部件、料仓换位部件、工件推出部件、真空发生器、开关电源、可编程序控制器、按钮、I/O接口板、通讯接口板、多种类型电磁阀及气缸组成,主要完成选择要安装工件的料仓,将工件从料仓中推出,将工件安装到位。 1.吸盘机械手臂机构:机械手臂、皮带传动结构真空吸嘴组成。由上下摆臂装置带动其旋转完成吸取小工件到放小工件完成组装流程的过程。 2.上下摆臂结构:由摆臂缸(直线缸)摆臂机械装置组成。将气缸直线运动转化为手臂旋转运动。带动手臂完成组装流程。 3.仓料换位机构:由机构端头换仓缸带动仓位装置实现换位(蓝、黑工件切换)。 4.推料机构:由推料缸与机械部件载料平台组成。在手臂离开时将工件推出完成上料。 5.真空发生器:当手臂在工件上方时,真空发生器通气吸盘吸气。 5.I/O接口板:将桌面上的输入与输出信号通过电缆C1与PLC的I/O相连。 6.控制面板:完成设备启动上电等操作。(具体在按钮上有标签说明)。
控制系统仿真课程设计 (2011级) 题目控制系统仿真课程设计学院自动化 专业自动化 班级 学号 学生姓名 指导教师王永忠/刘伟峰 完成日期2014年6月
控制系统仿真课程设计一 ———交流异步电机动态仿真 一 设计目的 1.了解交流异步电机的原理,组成及各主要单元部件的原理。 2. 设计交流异步电机动态结构系统; 3.掌握交流异步电机调速系统的调试步骤,方法及参数的整定。 二 设计及Matlab 仿真过程 异步电机工作在额定电压和额定频率下,仿真异步电机在空载启动和加载过程中的转速和电流变化过程。仿真电动机参数如下: 1.85, 2.658,0.2941,0.2898,0.2838s r s r m R R L H L H L H =Ω=Ω===, 20.1284Nm s ,2,380,50Hz p N N J n U V f =?===,此外,中间需要计算的参数如下: 21m s r L L L σ=-,r r r L T R =,22 2 s r r m t r R L R L R L +=,10N m TL =?。αβ坐标系状态方程: 其中,状态变量: 输入变量: 电磁转矩: 2p m p s r s L r d ()d n L n i i T t JL J βααωψψβ=--r m r r s r r d 1d L i t T T ααβαψψωψ=--+r m r r s r r d 1d L i t T T ββαβψψωψ=-++22s s r r m m m s r r s s 2r r r r d d i R L R L L L L i u t L T L L ααβαα σψωψ+=+-+22 s s r r m m m s r r s s 2 r r r r d d i R L R L L L L i u t L T L L ββαββ σψωψ+=--+[ ] T r r s s X i i αβαβωψψ=[ ] T s s L U u u T αβ=()p m e s s s s r n L T i i L βααβ ψψ=-
M法、T法测速单片机程序设计 摘要 本设计为M法、T法测速的单片机程序设计。使用STC89C52单片机作为控制器,使用该单片机的外部中断和定时器对编码器的输出的脉冲进行采样来计算出电机的转速。可以使用按键输入来调整M法、T法测速法中Z、Tc和Tt等参数以及测速方法的选择,以此来增强本设计的适应性。参数选择结果和电机转速计算结果均显示在LCD1602上。 关键字:STC89C52,M法、T法测速,LCD1602,电机转速 Ⅰ
Abstract This design as m, t-law velocity measurement of single-chip computer programming. Using STC89C52 single-chip computer as the controller, using the microcontroller's external interrupts and timers for encoder output pulse is sampled to calculate the speed of the motor. Can be adjusted using touchtone m, t law Velocimetry parameters such as z, Tt and Tc, as well as in speed measurement method of choice, as a way to enhance the adaptability of this design. Parameter selection and calculation of motor speed results are available on LCD1602. Keywords:STC89C52,M、T method, the LCD1602, Motor speed Ⅱ
成都理工大学工程技术学院电气综合控制系统课程设计 院系:自动化工程系 专业:建筑电气与智能化 班级:2013建电1班 学号: 姓名: 同组成员: 指导老师:
完成时间:2015年12月25日
目录 概述 (1) 一、PLC的分类及特点 (1) 二、PLC的结构与工作原理 (1) 三、S7-200 PLC的硬件组成及指令系统 (2) 四、常用低压电器介绍 (3) 第一部分 (6) 课题一电动机带延时正反转控制实操模拟 (6) 课题二天塔之光控制模拟 (10) 课题三机械手控制模拟 (15) 第二部分 (20) 课题一电动机点动控制 (20) 课题二电动机自锁控制 (22) 课题三两台电动机顺序起、停控制 (24) 课题四三台电动机顺序起动控制 (26) 总结 (28)
概 述 一、PLC 的分类及特点 可编程控制器简称PLC (Programmable Logic Controller ),在1987年国际电工委员会(International Electrical Committee )颁布的PLC 标准草案中对PLC 做了如下定义:PLC 是一种专门为在工业环境下应用而设计的数字运算操作的电子装置。它采用可以编制程序的存储器,用来在其内部存储执行逻辑运算、顺序运算、计时、计数和算术运算等操作的指令,并能通过数字式或模拟式的输入和输出,控制各种类型的机械或生产过程。PLC 及其有关的外围设备都应该按易于与工业控制系统形成一个整体,易于扩展其功能的原则而设计。 PLC 的分类:按产地分,可分为日系、欧美、韩台、大陆等;按点数分,可分为大型机、中型机及小型机等;按结构分,可分为整体式和模块式;按功能分,可分为低档、中档、高档三类。 PLC 的特点:1.可靠性高,抗干扰能力强2.配套齐全,功能完善,适用性强3.易学易用,深受工程技术人员欢迎3.系统的设计、建造工作量小,维护方便,容易改造4.体积小,重量轻,能耗低 二、PLC 的结构与工作原理 PLC 的结构:PLC 的类型繁多,功能和指令系统也不尽相同,但结构与工作原理则大同小异,通常由主机、输入/输出接口、电源、编程器扩展器接口和外部设备接口等几个主要部分组成。其组成框图如图1所示。 图1 整体式PLC 的组成框图 PLC 的工作原理:PLC 是采用“顺序扫描,不断循环”的方式进行工作的。即在PLC 运行时,CPU 根据用户按控制要求编制好并存于用户存储器中的程序,按指令步序号(或地址号)作周期性循环扫描,如无跳转指令,则从第一条指令开始逐条顺序执行用户程序,直至程序结束。然后重新返回第一条指令,开始下一轮新的扫描。在每次扫描过程中,还要完成对输入信号的采样和对输出状态的刷新等工作。 接触器电磁阀指示灯电源 电源 限位开关选择开关按钮
课程设计报告 题目PID控制器应用 课程名称控制系统仿真院部名称机电工程学院专业 班级 学生姓名 学号 课程设计地点 课程设计学时 指导教师 金陵科技学院教务处制成绩
一、课程设计应达到的目的 应用所学的自动控制基本知识与工程设计方法,结合生产实际,确定系统的性能指标与实现方案,进行控制系统的初步设计。 应用计算机仿真技术,通过在MATLAB软件上建立控制系统的数学模型,对控制系统进行性能仿真研究,掌握系统参数对系统性能的影响。 二、课程设计题目及要求 1.单回路控制系统的设计及仿真。 2.串级控制系统的设计及仿真。 3.反馈前馈控制系统的设计及仿真。 4.采用Smith 补偿器克服纯滞后的控制系统的设计及仿真。 三、课程设计的内容与步骤 (1).单回路控制系统的设计及仿真。 (a)已知被控对象传函W(s) = 1 / (s2 +20s + 1)。 (b)画出单回路控制系统的方框图。 (c)用MatLab的Simulink画出该系统。
(d)选PID调节器的参数使系统的控制性能较好,并画出相应的单位阶约响应曲线。注明所用PID调节器公式。PID调节器公式Wc(s)=50(5s+1)/(3s+1) 给定值为单位阶跃响应幅值为3。 有积分作用单回路控制系统
无积分作用单回路控制系统 大比例作用单回路控制系统 (e)修改调节器的参数,观察系统的稳定性或单位阶约响应曲线,理解控制器参数对系统的稳定性及控制性能的影响? 答:由上图分别可以看出无积分作用和大比例积分作用下的系数响应曲线,这两个PID调节的响应曲线均不如前面的理想。增大比例系数将加快系统的响
《运动控制系统》课程设计报告 时间2014.10 _ 学院自动化 _ 专业班级自1103 _ 姓名曹俊博__ 学号 指导教师潘月斗 ___ 成绩 _______
摘要 本课程设计从直流电动机原理入手,建立V-M双闭环直流调速系统,设计双闭环直流调速系统的ACR和ASR结构,其中主回路采用晶闸管三相桥式全控整流电路供电,触发器采用KJ004触发电路,系统无静差;符合电流超调量σi≤5%;空载启动到额定转速超调量σn≤10%。并详细分析系统各部分原理及其静态和动态性能,且利用Simulink对系统进行各种参数给定下的仿真。 关键词:双闭环;直流调速;无静差;仿真 Abstract This course is designed from DC motor, establish the principles of V-M double closed loop DC speed control system design, the double closed loop dc speed control system and the structure, including ACR ASR the main loop thyristor three-phase bridge type all control the power supply and trigger the rectifier circuit KJ004 trigger circuit, the system without the static poor; Accord with current overshoots sigma I 5% or less; No-load start to the rated speed overshoot sigma n 10% or less. And detailed analysis of the system principle and the static and dynamic performance, and the system of simulink to various parameters set simulation. Key Words:double closed loop;DC speed control system;without the static poor;simulation
指导教师评定成绩: 审定成绩: 重庆邮电大学 移通学院 自动控制原理课程设计报告 系部: 学生姓名: 专业: 班级: 学号: 指导教师: 设计时间:2013年12 月 重庆邮电大学移通学院制
目录 一、设计题目 二、设计报告正文 摘要 关键词 设计内容 三、设计总结 四、参考文献
一、设计题目 《自动控制原理》课程设计(简明)任务书——供2011级机械设计制造及其自动化专业(4-6班)本科学生用 引言:《自动控制原理》课程设计是该课程的一个重要教学环节,既有别于毕业设计,更不同于课堂教学。它主要是培养学生统筹运用自动控制原理课程中所学的理论知识,掌握反馈控制系统的基本理论和基本方法,对工程实际系统进行完整的全面分析和综合。 一设计题目:I型二阶系统的典型分析与综合设计 二系统说明: 该I型系统物理模拟结构如图所示。 系统物理模拟结构图 其中:R=1MΩ;C =1uF;R0=41R 三系统参量:系统输入信号:x(t); 系统输出信号:y(t);
四设计指标: 设定:输入为x(t)=a×1(t)(其中:a=5) 要求动态期望指标:M p﹪≤20﹪;t s≤4sec; 五基本要求: a)建立系统数学模型——传递函数; b)利用根轨迹方法分析和综合系统(学号为单数同学做); c)利用频率特性法分析和综合系统(学号为双数同学做); d)完成系统综合前后的有源物理模拟(验证)实验; 六课程设计报告: 1.按照移通学院课程设计报告格式写课程设计报告; 2.报告内容包括:课程设计的主要内容、基本原理; 3.课程设计过程中的参数计算过程、分析过程,包括: (1)课程设计计算说明书一份; (2)原系统组成结构原理图一张(自绘); (3)系统分析,综合用精确Bode图一张; (4)系统综合前后的模拟图各一张(附实验结果图); 4.提供参考资料及文献 5.排版格式完整、报告语句通顺; 6.封面装帧成册。
随机切换系统的仿真
目录 摘要 (3) 1 引言 (4) 1.1 切换系统概述 (4) 1.1.1 切换系统工程背景 (4) 1.1.2 切换系统研究现状 (4) 1.1.3 切换系统的特点 (4) 1.2 问题描述与准备 (5) 2 一般随机线性切换系统 (5) 2.1 切换系统模型 (5) 2.1.1 模型形式 (5) 2.1.2 反馈控制律 (6) 2.2 仿真实例 (7) 3 对随机切换系统性能的研究 (8) 3.1 线性切换系统的能控性和能观性 (8) 3.2 线性切换系统的稳定性 (9) 4 随机切换系统的有趣现象探索 (10) 4.1 切换函数的选取 (10) 4.1.1 切换函数依赖状态变量 (10) 4.1.2 切换函数为随机数 (11) 4.2 系统结构的选取 (12) 4.3 时延函数的选取 (12) 4.4 多个子系统切换探究 (13) 4.2.1 改变初值 (14) 4.2.2 改变切换函数 (15) 5 总结和展望 (16) 参考文献 (17)
摘要 本文研究了随机切换控制系统的分析和仿真问题。首先介绍切换系统的发展背景、特点、研究内容、研究现状以及本文要讨论的问题;第二部分介绍随机切换系统的一般模型,用实例分析了切换系统的运动特性;第三部分简析了切换系统性能,并结合实例说明切换函数的存在对于稳定性的影响;第四部分通过改变系统参数、不同切换函数等情况,利用MATLAB/Simulink软件对系统进行仿真,给出了仿真程序、系统状态曲线,试图从各个系统状态曲线的不同现象的特点和系统性能中发现一些有趣的现象并进行分析;第五部分对全文作了总结并对随机切换系统进行展望。 关键词:随机切换系统simulink仿真状态响应曲线分析有趣现象探索
控制系统仿真课程设计 (2010级) 题目控制系统仿真课程设计学院自动化 专业自动化 班级 学号 学生姓名 指导教师王永忠/刘伟峰 完成日期2013年7月
控制系统仿真课程设计(一) ——锅炉汽包水位三冲量控制系统仿真1.1 设计目的 本课程设计的目的是通过对锅炉水位控制系统的Matlab仿真,掌握过程控制系统设计及仿真的一般方法,深入了解反馈控制、前馈-反馈控制、前馈-串级控制系统的性能及优缺点,实验分析控制系统参数与系统调节性能之间的关系,掌握过程控制系统参数整定的方法。 1.2 设计原理 锅炉汽包水位控制的操作变量是给水流量,目的是使汽包水位维持在给定的范围内。汽包液位过高会影响汽水分离效果,使蒸汽带水过多,若用此蒸汽推动汽轮机,会使汽轮机的喷嘴、叶片结垢,严重时可能使汽轮机发生水冲击而损坏叶片。汽包液位过低,水循环就会被破坏,引起水冷壁管的破裂,严重时会造成干锅,甚至爆炸。 常见的锅炉汽水系统如图1-1所示,锅炉汽包水位受汽包中储水量及水位下汽包容积的影响,而水位下汽包容积与蒸汽负荷、蒸汽压力、炉膛热负荷等有关。影响水位变化的因素主要是锅炉蒸发量(蒸汽流量)和给水流量,锅炉汽包水位控制就是通过调节给水量,使得汽包水位在蒸汽负荷及给水流量变化的情况下能够达到稳定状态。 图1-1 锅炉汽水系统图
在给水流量及蒸汽负荷发生变化时,锅炉汽包水位会发生相应的变化,其分别对应的传递函数如下所示: (1)汽包水位在给水流量作用下的动态特性 汽包和给水可以看做单容无自衡对象,当给水增加时,一方面会使得汽包水位升高,另一方面由于给水温度比汽包内饱和水的温度低,又会使得汽包中气泡减少,导致水位降低,两方面的因素结合,在加上给水系统中省煤器等设备带来延迟,使得汽包水位的变化具有一定的滞后。因此,汽包水位在给水流量作用下,近似于一个积分环节和惯性环节相串联的无自衡系统,系统特性可以表示为 ()111()()(1)K H S G S W S s T s ==+ (1.1) (2)汽包水位在蒸汽流量扰动下的动态特性 在给水流量及炉膛热负荷不变的情况下,当蒸汽流量突然增加时,瞬间会导致汽包压力的降低,使得汽包内水的沸腾突然加剧,水中气泡迅速增加,将整个水位抬高;而当蒸汽流量突然减小时,汽包内压力会瞬间增加,使得水面下汽包的容积变小,出现水位先下降后上升的现象,上述现象称为“虚假水位”。虚假水位在大中型中高压锅炉中比较显著,会严重影响锅炉的安全运行。“虚假水位”现象属于反向特性,变化速度很快,变化幅值与蒸汽量扰动大小成正比,也与压力变化速度成正比,系统特性可以表示为 222()()()1f K K H s G s D s T s s ==-+ (1.2) 常用的锅炉水位控制方法有:单冲量控制、双冲量控制及三冲量控制。单冲量方法仅是根据汽包水位来控制进水量,显然无法克服“虚假水位”的影响。而双冲量是将蒸汽流量作为前馈量用于汽包水位的调节,构成前馈-反馈符合控制系统,可以克服“虚假水位”影响。但双冲量控制系统要求调节阀具有好的线性特性,并且不能迅速消除给水压力等扰动的影响。为此,可将给水流量信号引入,构成三冲量调节系统,如图1-2所示。图中LC 表示水位控制器(主回路),FC 表示给水流量控制器(副回路),二者构成一个串级调节系统,在实现锅炉水位控制的同时,可以快速消除给水系统扰动影响;而蒸汽流量作为前馈量用于消除“虚假水位”的影响。
机器人测控技术 大作业课程设计 课程设计名称:基于STM32的机械臂运动控制分析设计专业班级:自动1302 学生姓名:张鹏涛 学号:201323020219 指导教师:曹毅 课程设计时间:2016-4-28~2016-5-16 指导教师意见: 成绩: 签名:年月日 目录
摘要................................................................................................................. V 第一章运动模型建立...................................................................................... V I 1.1引言 ................................................................................................ V I 1.2机器人运动学模型的建立.................................................................. V I 1.2.1运动学正解 ......................................................................... VIII 第二章机械臂控制系统的总体方案设计 .......................................................... X 2.1机械臂的机械结构设计 ...................................................................... X 2.1.1臂部结构设计原则 ................................................................. X 2.1.2机械臂自由度的确定............................................................. XI 2.2机械臂关节控制的总体方案 .............................................................. XI 2.2.1机械臂控制器类型的确定...................................................... XI 2.2.2机械臂控制系统结构............................................................ XII 2.2.3关节控制系统的控制策略.................................................... XIII 第三章机械臂控制系统硬件设计.................................................................. XIII 3.1机械臂控制系统概述....................................................................... XIII 3.2微处理器选型................................................................................. XIV 3.3主控制模块设计.............................................................................. XV 3.3.1电源电路............................................................................. XV 3.3.2复位电路............................................................................ XVI 3.3.3时钟电路............................................................................ XVI 3.3.4 JTAG调试电路.................................................................. X VII 3.4驱动模块设计................................................................................. X VII
上海电力学院 自动控制原理实践报告 课名:自动控制原理应用实践 题目:水翼船渡轮的纵倾角控制 船舶航向的自动操舵控制 班级: 姓名: 学号:
水翼船渡轮的纵倾角控制 一.系统背景简介 水翼船(Hydrofoil)是一种高速船。船身底部有支架,装上水翼。当船的速度逐渐增加,水翼提供的浮力会把船身抬离水面(称为水翼飞航或水翼航行,Foilborne),从而大为减少水的阻力和增加航行速度。 水翼船的高速航行能力主要依靠一个自动稳定控制系统。通过主翼上的舵板和尾翼的调整完成稳定化操作。该稳定控制系统要保持水平飞行地穿过海浪。因此,设计上要求系统使浮力稳定不变,相当于使纵倾角最小。 航向自动操舵仪工作时存在包括舵机(舵角)、船舶本身(航向角)在内的两个反馈回路:舵角反馈和航向反馈。 当尾舵的角坐标偏转错误!未找到引用源。,会引起船只在参考方向上发生某一固定的偏转错误!未找到引用源。。传递函数中带有一个负号,这是因为尾舵的顺时针的转动会引起船只的逆时针转动。有此动力方程可以看出,船只的转动速率会逐渐趋向一个常数,因此如果船只以直线运动,而尾舵偏转一恒定值,那么船只就会以螺旋形的进入一圆形运动轨迹。 二.实际控制过程 某水翼船渡轮,自重670t,航速45节(海里/小时),可载900名乘客,可混装轿车、大客车和货卡,载重可达自重量。该渡轮可在浪高达8英尺的海中以航速40节航行的能力,全靠一个自动稳定控制系统。通过主翼上的舵板和尾翼的调整完成稳定化操作。该稳定控制系统要保持水平飞行地穿过海浪。因此,设计上要求该系统使浮力稳定不变,相当于使纵倾角最小。
上图:水翼船渡轮的纵倾角控制系统 已知,水翼船渡轮的纵倾角控制过程模型,执行器模型为F(s)=1/s。 三.控制设计要求 试设计一个控制器Gc(s),使水翼船渡轮的纵倾角控制系统在海浪扰动D (s)存在下也能达到优良的性能指标。假设海浪扰动D(s)的主频率为w=6rad/s。 本题要求了“优良的性能指标”,没有具体的量化指标,通过网络资料的查阅:响应超调量小于10%,调整时间小于4s。 四.分析系统时域 1.原系统稳定性分析 num=[50]; den=[1 80 2500 50]; g1=tf(num,den); [z,p,k]=zpkdata(g1,'v'); p1=pole(g1); pzmap(g1) 分析:上图闭环极点分布图,有一极点位于原点,另两极点位于虚轴左边,故处于临界稳定状态。但还是一种不稳定的情况,所以系统无稳态误差。 2.Simulink搭建未加控制器的原系统(不考虑扰动)。
题目:根据线性系统的频域分析法和串联校正方法的原理,编写MATLAB程序,要求针对被校正系统的特点以及校正目 标,实现串联校正装置结构的选择以及相应参数的计 算 1)在频域内进行系统设计,是一种间接设计方法,因为设计结果满足的是一些频域指标,而不是时域指标。然而,在频域内进行设计是一种简便的方法,在伯德图上虽不能严格地定量给出系统的动态性能。但却能方便地根据频域指标校正装置的参数。 2)频域设计的这种简便性,是由于开环系统的频率特性与闭环系统的时间响应有关。开环频域特性的低频段表征了闭环系统的稳态性能;中频段表征了闭环系统的动态性能;高频段表征了闭环系统的复杂性和噪声抑制性能。 3)因此,用频域法设计控制系统的实质,就是在系统中加入频率特性形状合适的校正装置,使开环系统频率特性形状变为所期望的形状:低频段增益充分大,以保证稳态误差要求;中频段对数幅频特性斜率一般为-20db/dec,并占据充分的频带,以保证具备适当的相角裕度;高频段增益尽快减小,以消弱噪声影响。 4)串联校正就是将校正装置G(s)与待校正系统在主调节回路里串联连接。控制环节的设计的实质就是,当系统的静态、动态性能指标偏离要求时,在系统的适当位置加入适宜的特殊机构,通过调节它们的参数,从而使系统的整体特性发生改变,最终达到符合要求的性能指标。
1 算法实现流程图
2 伯德图超前校正的设计 2.1 伯德图超前校正设计的方法 1)超前校正环节的两个转折频率应分别设在系统截止频率的两侧。因为超 前校正环节相频特性曲线具有正相移,幅频特性曲线具有正斜率,所以校正后系统伯德图的低频段不变,而其截止频率和相角裕度比原系统的大,这说明校正后系统的快速性和稳定性得到提高。 2)然而,这两者是一对矛盾,不可能同时达到最大,总是顾此失彼。一般, 我们在选用超前校正时,以提高截止频率为主要目的。 3)利用系统频率响应性能可以试凑地解决超前滞后类校正器的设计问题, 但这样很耗时,有时还不能得出期望的结果。本次本人用基于校正后系统剪切频率和相位裕度设定的算法来设计超前校正。 2.2 超前校正设计的步骤 1)根据稳态误差要求,确定开环增益k 。 2)利用已确定的开环增益,计算待校正系统的相角裕度。 调用伯德函数可以轻松求出。 3) 根据幅值关系计算出α。 由超前校正系统的伯德图可知,在最大相角处,幅值增益为10lg α由此 可算出α。 4)计算零、极点z 、p 的值 由 c m ωω=== 得p ω=、/z p α= 5)得出校正网络传递函数、并作校正后系统的伯德图,得相角裕度。 2.3 超前校正设计的程序 [mag,phase,w]=bode(sys0); m1=spline(w,mag,wc);
控制系统数字仿真课程设计 1.课程设计应达到的目的 1、通过Matlab仿真熟悉课程设计的基本流程; 2、掌握控制系统的数学建模及传递函数的构造; 3、掌握控制系统性能的根轨迹分析; 4、学会分析系统的性能指标; 2.课程设计题目及要求 设计要求 1、进行系统总体设计,画出原理框图。(按给出的形式,自行构造数学模型,构造成1 个零点,三个极点的三阶系统,主导极点是一对共轭复根) G(s)=10(s+2)/(s+1)(s2+2s+6) 2、构造系统传递函数,利用MATLAB绘画系统的开环和闭环零极点图;(分别得 到闭环和开环的零极点图)参考课本P149页例题4-30 clear; num = [10,20]; den =[1 3 8 6]; pzmap(num,den) 3、利用MATLAB绘画根轨迹图,分析系统随着根轨迹增益变化的性能。并估算超 调量=16.3%时的K值(计算得到)。参考课本P149页例题4-31 clear num=[10,20]; den=[1 3 8 6]; sys=tf(num,den); rlocus(sys) hold on jjx(sys); s=jjx(sys); [k,Wcg]=imwk(sys)
set(findobj('marker','x'),'markersize',8,'linewidth',1.5,'Color','k'); set(findobj('marker','o'),'markersize',8,'linewidth',1.5,'Color','k'); function s=jjx(sys) sys=tf(sys); num=sys.num{1}; den=sys.den{1}; p=roots(den); z=roots(num); n=length(p); m=length(z); if n>m s=(sum(p)-sum(z))/(n-m) sd=[]; if nargout<1 for i=1:n-m sd=[sd,s] end sysa=zpk([],sd,1); hold on; [r,k]=rlocus(sysa); for i=1:n-m plot(real(r(i,:)),imag(r(i,:)),'k:'); end end else disp; s=[]; end function [k,wcg]=imwk(sys) sys=tf(sys) num=sys.num{1} den=sys.den{1}; asys=allmargin(sys); wcg=asys.GMFrequency; k=asys. GainMargin;
摘要 速度对任何一个运动体来说都是一个至关重要的物理量,如何快速方便地进行速度调节是我们一直需要探索的问题。这份课程设计采用的是直流PWM调速双闭环控制系统,该调速系统是一种模拟控制方式,其根据相应载荷的变化来调制晶体管栅极或基极的偏置,来实现开关稳压电源输出晶体管或晶体管导通时间的改变,这种方式能使电源的输出电压在工作条件变化时保持恒定,是利用微处理器的数字信号对模拟电路进行控制的一种非常有效的技术。 PWM控制技术以其控制简单,灵活和动态响应好的优点而成为电力电子技术最广泛应用的控制方式,也是人们研究的热点。由于当今科学技术的发展已经没有了学科之间的界限,结合现代控制理论思想或实现无谐振软开关技成为PWM控制技术发展的主要方向之一。这份课程设计对于PWM设计的各个方面进行了简要阐述,并进行了Proteus仿真以及Matlab中的Simulink仿真,去的了较好的结果。 关键词:PWM调速;Proteus仿真;Matlab ;双闭环 1
目录 1 绪论 (3) 2 设计总要求 (4) 2.1设计已知参数 (4) 2.2设计具体要求 (4) 3 控制电路设计 (4) 3.1直流调速系统控制方案的选择 (4) 3.2 电流环设计 (5) 3.2.1 电流调节器的设计 (6) 3.3 转速调节器 (7) 4 主电路设计 (8) 4.1 PWM调速系统主电路形式选择 (8) 4.1.1 T型PWM变换器电路 (8) 4.1.2 H型PWM变换器电路 (9) 4.2 PWM调速系统开关电路形式选择 (13) 4.3 H型双极性逆变器的驱动分析 (14) 5 频率电压转换设计 (17) 6 脉冲分配及功率放大电路设计 (17) 7 PI调节器设计 (18) 8 三角波发生器设计 (19) 9 Matlab仿真结果 (20) 10 设计总结 (21) 参考文献 (23)
自控课程设计课程设计(论文) 设计(论文)题目单位反馈系统中传递函数的研究 学院名称Z Z Z Z学院 专业名称Z Z Z Z Z 学生姓名Z Z Z 学生学号Z Z Z Z Z Z Z Z Z Z 任课教师Z Z Z Z Z 设计(论文)成绩
单位反馈系统中传递函数的研究 一、设计题目 设单位反馈系统被控对象的传递函数为 ) 2)(1()(0 0++= s s s K s G (ksm7) 1、画出未校正系统的根轨迹图,分析系统是否稳定。 2、对系统进行串联校正,要求校正后的系统满足指标: (1)在单位斜坡信号输入下,系统的速度误差系数=10。 (2)相角稳定裕度γ>45o , 幅值稳定裕度H>12。 (3)系统对阶跃响应的超调量Mp <25%,系统的调节时间Ts<15s 3、分别画出校正前,校正后和校正装置的幅频特性图。 4、给出校正装置的传递函数。计算校正后系统的截止频率Wc 和穿频率Wx 。 5、分别画出系统校正前、后的开环系统的奈奎斯特图,并进行分析。 6、在SIMULINK 中建立系统的仿真模型,在前向通道中分别接入饱和非线性环节和回环非线性环节,观察分析非线性环节对系统性能的影响。 7、应用所学的知识分析校正器对系统性能的影响(自由发挥)。 二、设计方法 1、未校正系统的根轨迹图分析 根轨迹简称根迹,它是开环系统某一参数从0变为无穷时,闭环系统特征方程式的根在s 平面上变化的轨迹。 1)、确定根轨迹起点和终点。 根轨迹起于开环极点,终于开环零点;本题中无零点,极点为:0、-1、-2 。故起于0、-1、-2,终于无穷处。 2)、确定分支数。 根轨迹分支数与开环有限零点数m 和有限极点数n 中大者相等,连续并且对称于实轴;本题中分支数为3条。
运动控制系统 实验指导书 赵黎明、王雁编 广东海洋大学信息学院自动化系
直流调速 实验一不可逆单闭环直流调速系统静特性的研究 一.实验目的 1.研究晶闸管直流电动机调速系统在反馈控制下的工作。 2.研究直流调速系统中速度调节器ASR的工作及其对系统静特性的影响。 3.学习反馈控制系统的调试技术。 二.预习要求 1.了解速度调节器在比例工作与比例—积分工作时的输入—输出特性。 2.弄清不可逆单闭环直流调速系统的工作原理。 三.实验线路及原理 见图6-7。 四.实验设备及仪表 1.MCL系列教学实验台主控制屏。 2.MCL—18组件(适合MCL—Ⅱ)或MCL—31组件(适合MCL—Ⅲ)。 3.MCL—33(A)组件或MCL—53组件。 4.MEL-11挂箱 5.MEL—03三相可调电阻(或自配滑线变阻器)。 6.电机导轨及测速发电机、直流发电机M01(或电机导轨及测功机、MEL—13组件)。 7.直流电动机M03。 8.双踪示波器。 五.注意事项 1.直流电动机工作前,必须先加上直流激磁。 2.接入ASR构成转速负反馈时,为了防止振荡,可预先把ASR的RP3电位器逆时针旋到底,使调节器放大倍数最小,同时,ASR的“5”、“6”端接入可调电容(预置7μF)。 3.测取静特性时,须注意主电路电流不许超过电机的额定值(1A)。 4.三相主电源连线时需注意,不可换错相序。 5.电源开关闭合时,过流保护发光二极管可能会亮,只需按下对应的复位开关SB1
即可正常工作。 6.系统开环连接时,不允许突加给定信号U g起动电机。 7.起动电机时,需把MEL-13的测功机加载旋钮逆时针旋到底,以免带负载起动。 8.改变接线时,必须先按下主控制屏总电源开关的“断开”红色按钮,同时使系统的给定为零。 9.双踪示波器的两个探头地线通过示波器外壳短接,故在使用时,必须使两探头的地线同电位(只用一根地线即可),以免造成短路事故。 六.实验内容 1.移相触发电路的调试(主电路未通电) (a)用示波器观察MCL—33(或MCL—53,以下同)的双脉冲观察孔,应有双脉冲,且间隔均匀,幅值相同;观察每个晶闸管的控制极、阴极电压波形,应有幅值为1V~2V 的双脉冲。 (b)触发电路输出脉冲应在30°~90°范围内可调。可通过对偏移电压调节单位器及ASR输出电压的调整实现。例如:使ASR输出为0V,调节偏移电压,实现α=90°;再保持偏移电压不变,调节ASR的限幅电位器RP1,使α=30°。 2.求取调速系统在无转速负反馈时的开环工作机械特性。 a.断开ASR的“3”至U ct的连接线,G(给定)直接加至U ct,且Ug调至零,直流电机励磁电源开关闭合。 b.合上主控制屏的绿色按钮开关,调节三相调压器的输出,使U uv、Uvw、Uwu=200V。 注:如您选购的产品为MCL—Ⅲ、Ⅴ,无三相调压器,直接合上主电源。以下均同。 c.调节给定电压U g,使直流电机空载转速n0=1500转/分,调节测功机加载旋钮(或直流发电机负载电阻),在空载至额定负载的范围内测取7~8点,读取整流装置输出电压U d 3.带转速负反馈有静差工作的系统静特性 a.断开G(给定)和U ct的连接线,ASR的输出接至U ct,把ASR的“5”、“6”点短接。 b.合上主控制屏的绿色按钮开关,调节U uv,U vw,U wu为200伏。 c.调节给定电压U g至2V,调整转速变换器RP电位器,使被测电动机空载转速n0=1500转/分,调节ASR的调节电容以及反馈电位器RP3,使电机稳定运行。 调节测功机加载旋钮(或直流发电机负载电阻),在空载至额定负载范围内测取7~8