ARM应用系统开发详解──基于S3C4510B的系统设计 1 第6章部件工作原理与编程示例
本章主要以S3C4510B的几个常用功能部件为编程对象,介绍基于S3C4510B的系统的程序设计与调试,同时简介BootLoader的基本原理和编程方法,通过对本章的阅读,可以使读者了解S3C4510B各功能部件的工作原理及基本编程方法。
本章的主要内容包括:
-嵌入式系统应用程序设计的基本方法。
-S3C4510B通用I/O口的工作原理与编程示例。
-S3C4510B串行通信控制器的工作原理与编程示例。
-S3C4510B中断控制器的工作原理与编程示例。
-S3C4510B定时器的工作原理与编程示例。
-S3C4510B DMA控制器的工作原理与编程示例。
-S3C4510B IIC总线控制器的工作原理与编程示例。
-S3C4510B 以太网控制器的工作原理。
-Flash存储器的工作原理与编程示例。
-BootLoader简介。
6.1 嵌入式系统的程序设计方法
一般来说,对于一个完整的嵌入式应用系统的开发,硬件的设计与调试工作仅占整个工作量的一半,应用系统的程序设计也是嵌入式系统设计一个非常重要的方面,程序的质量直接影响整个系统功能的实现,好的程序设计可以克服系统硬件设计的不足,提高应用系统的性能,反之,会使整个应用系统无法正常工作。
本章从应用的角度出发,以S3C4510B的各个功能模块为编程对象,介绍一些实用的程序段,读者既可按自己的需要修改,也可吸收其设计思
ARM应用系统开发详解──基于S3C4510B的系统设计 2
想和方法,以便设计出适合于自己特定应用系统的实用程序。同时,由于ARM体系结构的一致性,尽管以下的应用程序段是针对特定硬件平台开发的,其编程思路同样适合于其他类型的ARM微处理器。
不同于基于PC平台的程序开发,嵌入式系统的程序设计具有其自身的特点,程序设计的方法也会因系统或因人而异,但其程序设计还是有其共同的特点及规律的。在编写嵌入式系统应用程序时,可采取如下几个步骤:
(1)明确所要解决的问题:根据问题的要求,将软件分成若干个相对独立的部分,并合理设计软件的总体结构。
(2)合理配置系统资源:与基于8位或16位微控制器的系统相比较,基于32位微控制器的系统资源要丰富得多,但合理
的资源配置可最大限度地发挥系统的硬件潜能,提高系统的
性能。对于一个特定的系统来说,其系统资源,如Flash 、
EEPROM、SDRAM、中断控制等,都是有限的,应合理配
置系统资源。
(3)程序的设计、调试与优化:根据软件的总体结构编写程序,同时采用各种调试手段,找出程序的各种语法和逻辑错误,
最后应使各功能程序模块化,缩短代码长度以节省存储空间
并减少程序执行时间。
此外,由于嵌入式系统一般都应用在环境比较恶劣的场合,易受各种因素的干扰,从而影响到系统的可靠性,因此,应用程序的抗干扰技术也是必须考虑的,这也是嵌入式系统应用程序不同于其他应用程序的一个重要特点。
6.2 部件工作原理与编程示例
6.2.1 通用I/O口工作原理与编程示例
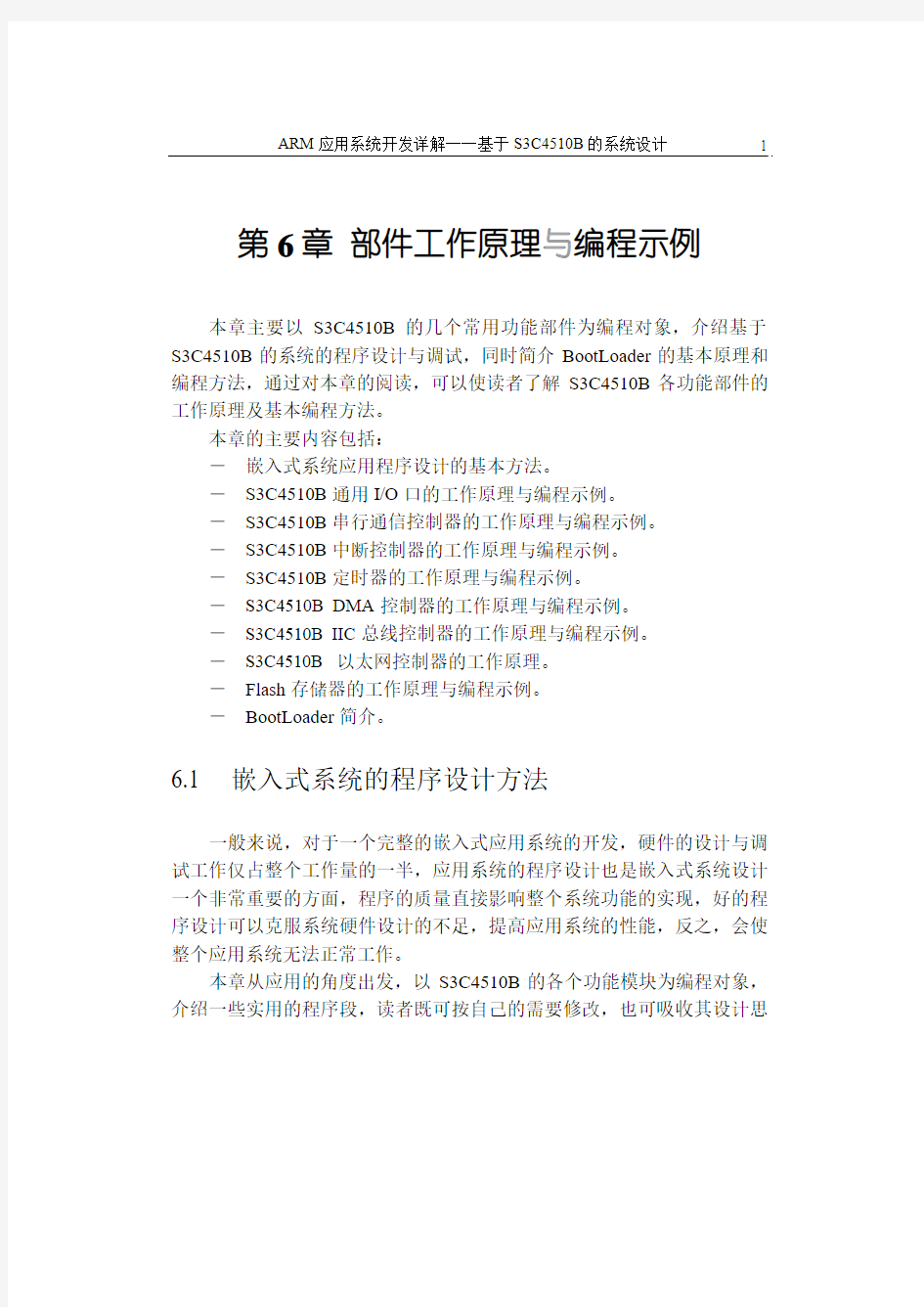
S3C4510B提供了18个可编程的通用I/O端口,用户可将每个端口配置为输入模式、输出模式或特殊功能模式,由片内的特殊功能寄存器
ARM应用系统开发详解──基于S3C4510B的系统设计 3
IOPMOD和IOPCON控制。
端口0~7的工作模式仅由IOPMOD寄存器控制,但通过设置IOPCON 寄存器,端口8~11可用作外部中断请求INTREQ0~INTREQ3的输入,端口12、端口13可用作外部DMA请求XDREQ0、XDREQ1的输入,端口14、端口15可作为外部DMA请求的应答信号XDACK0、XDACK1,端口16可作为定时器0的溢出TOUT0,端口17可作为定时器1的溢出TOUT1。
I/O端口的功能模块如图6.1所示:
图6.1 通用I/O口的功能模块
控制I/O口的特殊功能寄存器一共有3个:IOPMOD、IOPCON和IOPDATA,简要描述如下:
I/O口模式寄存器(IOPMOD):
ARM应用系统开发详解──基于S3C4510B的系统设计 4
[0]P0口的I/O模式位
0=输入
1=输出
[1]P1口的I/O模式位
0=输入
1=输出
[2]P2口的I/O模式位
0=输入
1=输出
[3~17]P3~P17口的I/O模式位
0=输入
1=输出
I/O口控制寄存器(IOPCON):
I/O口控制寄存器IOPCON用于配置端口P8~P17的特殊功能,当这些端口用作特殊功能(如外部中断请求、外部中断请求应答、外部DMA 请求或应答、定时器溢出)时,其工作模式由IOPCON寄存器控制,而不再由IOPMOD寄存器控制。
对于特殊功能输入端口,S3C4510B提供了一个滤波器用于检测特殊功能信号的输入,如果输入信号电平宽度等于三个系统时钟周期,该信号
[4:0]控制端口8的外部中断请求信号0(xIRQ0)输入
ARM应用系统开发详解──基于S3C4510B的系统设计 5
[4]端口8用作外部中断请求信号0
0 = 禁止 1 = 使能
[3] 0 = 低电平有效 1 = 高电平有效
[2] 0 = 滤波器关 1 = 滤波器开
[1:0] 00 = 电平检测01 = 上升沿检测
10 = 下降沿检测11 = 上升、下降沿均检测
[9:5]控制端口9的外部中断请求信号1(xIRQ1)输入
使用方法同端口8。
[14:10]控制端口10的外部中断请求信号2(xIRQ2)输入使用方法同端口8。
[19:15]控制端口11的外部中断请求信号3(xIRQ3)输入使用方法同端口8。
[22:20]控制端口12的外部DMA请求信号0(DRQ0)输入
[22]端口12用作外部DMA请求信号0(nXDREQ0)
0 = 禁止 1 = 使能
[21] 0 = 滤波器关 1 = 滤波器开
[20] 0 = 低电平有效 1 = 高电平有效
[25:23]控制端口13的外部DMA请求信号1(DRQ1)输入
[25]端口13用作外部DMA请求信号1(nXDREQ1)
0 = 禁止 1 = 使能
[24] 0 = 滤波器关 1 = 滤波器开
[23] 0 = 低电平有效 1 = 高电平有效
[27:26]控制端口14的外部DMA应答信号0(DAK0)输出
[27]端口14用作外部DMA信号0(nXDACK0)
0 = 禁止 1 = 使能
[26] 0 = 低电平有效 1 = 高电平有效
[29:28]控制端口15的外部DMA应答信号1(DAK1)输出
[29]端口15用作外部DMA信号1(nXDACK1)
0 = 禁止 1 = 使能
[28] 0 = 低电平有效 1 = 高电平有效
[30]控制端口16作为定时器0溢出信号(TOEN0)
ARM应用系统开发详解──基于S3C4510B的系统设计 6
0 = 禁止 1 = 使能
[31]控制端口17作为定时器1溢出信号(TOEN1)
0 = 禁止 1 = 使能
I/O口数据寄存器(IOPDATA):
当配置为输入模式时,读取I/O口数据寄存器IOPDATA的每一位对应输入状态,当配置为输出模式时,写每一位对应输出状态。位[17:0]对
[17:0]对应I/O口P17~P0的读/写值。I/O口数据寄存器的值反映对应引脚的信号电平。
以上简述了S3C4510B的通用I/O口的基本工作原理,更详细的内容可参考S3C4510B的用户手册。
作为本章的第一个例子,将比较详细地描述建立项目、编写程序的过程,同时可参考第8章关于ADS集成编译调试环境的使用方法。
打开CodeWarrior for ARM Developer Suite(或ARM Project Manager),新建一个项目,并新建一个文件,名为Init.s,具体内容如下:
;************************************************************* ;Institute of Automation, Chinese Academy of Sciences
;File Name:Init.s
;Description:
;Author:Li Juguang
;************************************************************* IMPORT Main
AREA Init,CODE,READONLY
ENTRY
LDR R0, =0x3FF0000
LDR R1, =0xE7FFFF80 ;配置SYSCFG,片内4KB Cache,4KB SRAM
ARM应用系统开发详解──基于S3C4510B的系统设计7
STR R1, [R0]
LDR SP, =0x3FE1000 ;SP指向4K SRAM的尾地址,堆栈向下生成
BL Main
B .
END
该段代码完成的功能为:
配置SYSCFG特殊功能寄存器,将S3C4510B片内的8KB一体化的SRAM配置为4KB Cache,4KB SRAM,并将用户堆栈设置在片内的SRAM 中。
4KB SRAM的地址为0x3FE,0000~(0x3FE,1000-1),由于S3C4510B 的堆栈由高地址向低地址生成,将SP初始化为0x3FE,1000。
完成上述操作后,程序跳转到Main函数执行。
保存Init.s,并添加到新建的项目。
再新建一个文件,名为main.c,具体内容如下:
/*************************************************************** * Institute of Automation,Chinese Academy of Sciences
* File Name:main.c
* Description:
* Author:Li Juguang
* Date:
*************************************************************/ #define IOPMOD (*(volatile unsigned *)0x03FF5000) //IO port mode register
#define IOPDATA (*(volatile unsigned *)0x03FF5008) //IO port data register
void Delay(unsigned int);
int Main()
{
unsigned LED;
IOPMOD=0xFFFFFFFF; //将IO口置为输出模式
IOPDATA=0x01;
for(;;)
{
ARM应用系统开发详解──基于S3C4510B的系统设计8
LED=IOPDATA;
LED=(LED<<1);
IOPDATA=LED;
Delay(10);
if(!(IOPDATA&0x0F))
IOPDATA=0x01;
}
return(0);
}
void Delay(unsigned int x)
{
unsigned int i,j,k;
for(i=0;i<=x;i++)
for(j=0;j<0xff;j++)
for(k=0;k<0xff;k++);
}
保存main.c,并添加到新建的项目。此时可对该项目进行编译链接,生成可执行的映像文件。
可执行的映像文件主要用于程序的调试,一般在系统的SDRAM中运行,并不烧写入Flash,因此,项目文件在链接时,注意程序的入口点应与系统中SDRAM的实际配置地址相对应。链接器默认程序的入口地址为0x8000,该值应根据实际的SDRAM映射地址进行修改。
在编译链接项目文件时,将链接器程序的入口地址设置为0x0040,0000。
打开AXD Debugger(或ARM Debugger for Windows)的命令行窗口,执行obey命令:
>obey C:\memmap.txt
系统中SDRAM被映射到0x0040,0000~(0x0140,0000-1),从0x0040,0000处装入生成的可执行的映像文件,并将PC指针寄存器修改为0x0040,0000,就可单步调试或运行生成的可执行的映像文件。
该程序的运行效果使接在P0~P3口的LED显示器轮流被点亮。
ARM应用系统开发详解──基于S3C4510B的系统设计9 6.2.2 串行通讯工作原理与编程示例
串行通讯是微计算机之间一种常见的近距离通讯手段,因使用方便、编程简单而广泛使用,几乎所有的微控制器、PC都提供串行通讯接口。
S3C4510B的UART单元提供两个独立的异步串行I/O口(Asynchronous Serial I/O,SIO),每个通讯口均可工作在中断模式或DMA 模式,也即UART能产生内部中断请求或DMA请求在CPU和串行I/O口之间传送数据。
S3C4510B的UART单元特性包括:
-波特率可编程
-支持红外发送与接收
-1~2个停止位
-5、6、7或8个数据位
-奇偶校验
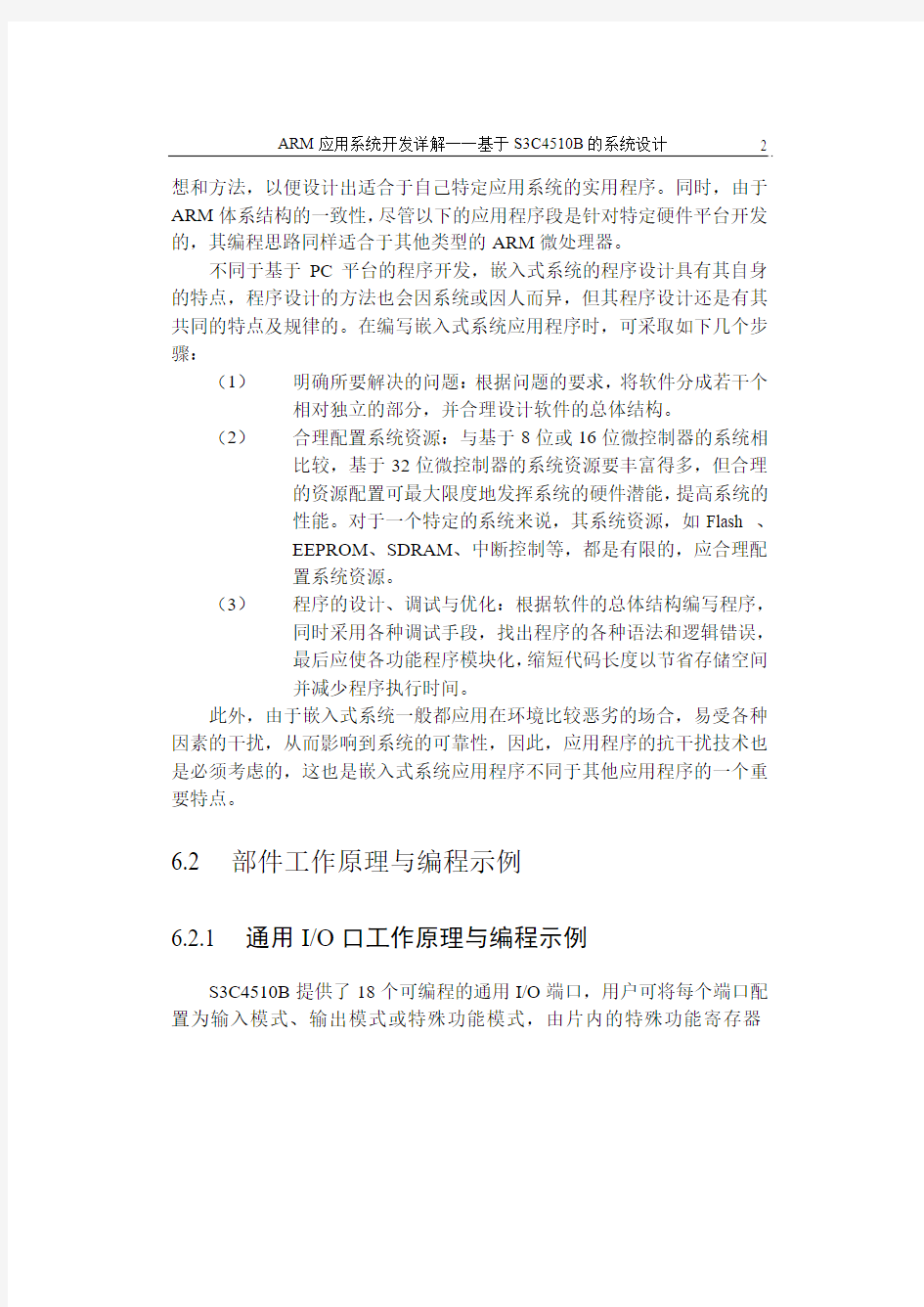
每一个异步串行通讯口都具有独立的波特率发生器、发送器、接收器和控制单元。波特率发生器可由片内系统时钟MCLK驱动,或由外部时钟UCLK(Pin64)驱动;发送器和接收器都有独立的数据缓冲寄存器和数据移位器。
待发送的数据首先传送到发送缓冲寄存器,然后拷贝到发送移位器并通过发送数据引脚UATXDn发送出去。接收数据首先从接收数据引脚UARXDn移入移位器,当接收到一个字节时就拷贝到接收缓冲寄存器。
SIO的控制单元通过软件控制工作模式的选择、状态和中断产生。
当使用UART的发送中断功能时,应在初始化UART之前先写一个字节数据到UART的发送缓冲寄存器,这样,当发送缓冲寄存器为空时就可以产生UART的发送中断。
图6.2为串行口的功能模块。
ARM应用系统开发详解──基于S3C4510B的系统设计10
图6.2 串行口功能模块。
表6-4为UART特殊功能寄存器描述
ARM应用系统开发详解──基于S3C4510B的系统设计11
表6-6为UART行控制寄存器描述
ARM应用系统开发详解──基于S3C4510B的系统设计12
[1:0]每帧字长(WL)
00=5位01=6位
10=7位11=8位
[2]帧末尾停止位(STB)
0 = 每帧一个停止位
1 = 每帧两个停止位
[5:3]校验模式(PMD)
0xx = 无校验
100 = 奇校验
101 = 偶校验
110 = 校验强制/检测为1
111 = 校验强制/检测为0
[6]串行时钟选择(SC)
0 = 内部时钟(MCLK)
1 = 外部时钟(UCLK)
[7]红外模式选择(IR)
0 = 正常操作模式
1 = 红外发送模式
表6-8为UART控制寄存器描述
ARM应用系统开发详解──基于S3C4510B的系统设计13
[1:0]接收模式选择(RxM)
00 = 禁止
ARM应用系统开发详解──基于S3C4510B的系统设计14
01 = 产生中断请求
10 = 产生GDMA通道0请求
11 = 产生GDMA通道1请求
[2]接收状态中断使能(RxSI)
0 = 不产生接收状态中断
1 = 产生接收状态中断
[4:3]发送模式选择(TxM)
00 = 禁止
01 = 产生中断请求
10 = 产生GDMA通道0请求
11 = 产生GDMA通道1请求
[5]数据设备准备好(DSR)
0 = 不产生DSR输出(nUADSR引脚)
1 = 产生DSR输出(nUADSR引脚)
[6]发送间隔(SBK)
0 = 发送间隔信号
1 = 不发送间隔信号
[7]回环使能(LPB)
0 = 正常工作模式
1 = 使能回环模式(仅用于测试)
表6-10为UART状态寄存器描述
ARM应用系统开发详解──基于S3C4510B的系统设计15
ARM应用系统开发详解──基于S3C4510B的系统设计16
[0]Overrun错误(OV)
0=在接收过程中未产生Overrun错误
1=Overrun错误(如果UCON[2]置为1,则会产生接收状态中断)
注:当已接收到的数据还未被读取,而新接收的数据覆盖了原有的数据时,就会产生Overrun错误。
[1]校验错误(PE)
0=在接收过程中无校验错误
1=校验错误(如果UCON[2]置为1,则会产生接收状态中断)
[2]帧错误(FE)
0=在接收过程中无帧错误
1=帧错误(如果UCON[2]置为1,则会产生接收状态中断)
[3]间隔信号检测(BKD)
0=未收到间隔信号
1=收到间隔信号(如果UCON[2]置为1,则会产生接收状态中断)
[4]数据终端准备好(DTR)
0=DTR引脚(nUADTR)置高
1=DTR引脚(nUADTR)置低
[5]接收数据准备好(RDR)
ARM应用系统开发详解──基于S3C4510B的系统设计17
0=接收缓冲寄存器中无有效数据
1=接收缓冲寄存器中有有效数据(若设置UCON[1:0],则产生中断或DMA请求)
[6]发送缓冲寄存器空(TBE)
0=发送保持寄存器中有有效数据
1=发送保持寄存器中无数据(若设置UCON[4:3],则产生中断或DMA 请求)
[7]发送结束(TC)
0=正在发送数据
1=发送数据结束
UART发送缓冲寄存器(UART Transmit Buffer Registers,UTXBUF0、UTXBUF1):
UART发送缓冲寄存器UTXBUF0、UTXBUF1,存放待发送的8位数据。当把待发送的数据写入该寄存器时,UART的状态寄存器USTAT[6]
表6-2-11为UART发送缓冲寄存器描述
[7:0]UART要发送的数据
UART接收缓冲寄存器(UART Receive Buffer Register,URXBUF0、URXBUF1):
ARM应用系统开发详解──基于S3C4510B的系统设计18
UART接收缓冲寄存器URXBUF0、URXBUF1,存放接收到的8位串行数据。当UART接收完一个数据帧,UART的状态寄存器USTAT[5]置
表6-14为UART接收缓冲寄存器描述
USTAT[5]都会自动清‘0’。
[7:0]UART接收到的数据
UART波特率除数因子寄存器(UART Baud Rate Divisor Registers,UBRDIV0、UBRDIV1):
UART波特率除数因子寄存器UBRDIV0、UBRDIV1的值,决定发送、
[3:0] 波特率除数因子值(CNT1)
xxx0=除1
ARM应用系统开发详解──基于S3C4510B的系统设计19
xxx1=除16
[15:4]时间常数值(CNT0)
CNT0的计算公式如下:
CNT0=MCLK/(32×BR)-1
MCLK:系统的工作频率。
BR:通讯的波特率。
UART波特率示例:
UART的波特率发生器的输入时钟可以为系统时钟,也可以从外部引入时钟信号。
若选用系统时钟为波特率发生器的输入时钟,当系统时钟为50MHz 时,则最大的波特率时钟输出为MCLK2/16(= 1.5625MHz),其中MCLK2为系统时钟MCLK除以2。
UCLK引脚为UART0、UART1的外部时钟输入引脚。UART波特率发生器的输入时钟MCLK2或UCLK,由寄存器UCCON[6]选择。
下图为UART波特率发生器的结构图和典型的波特率。
ARM应用系统开发详解──基于S3C4510B的系统设计20
关于UART工作原理和使用方法的更详细内容,可参考S3C4510B用户手册。
以下的示例完成通过串行口UART0发送数据的功能,接收功能的编程与之类似。该示例的通讯协议为:19200波特、8位数据、1位停止、无校验。
打开CodeWarrior for ARM Developer Suite(或ARM Project Manager),新建一个项目,并新建一个文件,名为Init.s,具体内容与第一个例子相同。
保存Init.s,并添加到新建的项目。
再新建一个文件,名为main.c,具体内容如下:
/************************************************************* * Institute of Automation, Chinese Academy of Sciences
* File Name:main.c
* Description:
* Author:Li Juguang
*************************************************************/ #define ULCON0 (*(volatile unsigned *)0x03FFD000) //UART channel0 line control register
#define UCON0 (*(volatile unsigned *)0x03FFD004) //UART channel0 control register
#define USTAT0 (*(volatile unsigned *)0x03FFD008) //UART channel0 status register
#define UTXBUF0 (*(volatile unsigned *)0x03FFD00c) //UART channel0 transimit holding register
东北大学 第一章基础知识 1.(95‘)试画出材料的疲劳极限线图,标出特殊点的坐标,并说明等效系数的意义。 2.(95‘)什么是可靠性设计准则?为什么要建立可靠性设计准则? 3.(96‘)承受静载荷作用的零件,试举例说明能否在危险截面上产生变应力作用? 4.(97‘)机械零件的胶合失效是如何产生的? 5.(97‘)机械零件上那些位置容易产生应力集中? 6.(98‘)用文字描述迈内尔理论。 7.(99‘)在进行机械零件有限寿命的疲劳强度计算时,需要将材料的疲劳曲线修正为零件的疲劳曲线,有几种修正方法?各有何有缺点? 8.(99‘)机械零件的主要失效形式有那些? 9.(01‘)静强度设计和疲劳强度设计主要共同点和不同点是什么? 10(02‘)一承受非对称循环变应力作用的机械零件(应力循环特性r=常数)。试画图说明其有限寿命的疲劳强度计算方法(过程)。 11.(03‘)何谓应力集中?对零件的静强度、疲劳强度影响是否相同? 12(03‘)线性疲劳损伤累积方程(Miner方程)的意义是什么? (04‘无简答题) 第二章螺纹联结和轴毂联结 13.(95‘)试画出铰制孔用螺栓联结的结构图。 14.(98’)螺栓组受力分析的目的是什么? 15(99‘)为什么螺栓联结需要防松?放松的实质是什么?有哪几种防松措施? 16(00’)花键联结有哪几种?它的定心方式如何? 17(01‘)测力矩扳手和定力矩扳手是利用什么原理来测定螺纹联结预紧力的? 18(02’)当螺栓联结受到轴向工作载荷F后,螺栓伸长的增量△δL和被联结件的变形量的恢复量△δF是什么关系,为什么? 19.(02‘)试述花键联结的主要优点。 20(03’)平键联结设计中,键的尺寸bXhXL是怎么确定的? (04‘无简答题) 第三章带传动 21。(96‘)试述带传动设计准则,并说明哪种失效形式限制了带传动的承载能力? 22.(97’)V带传动中,张紧装置应该放在什么位置?为什么? 23.(99‘)在设计V带传动时,为什么要限制带的根数?限制条件如何? 24.(00’)在普通V带传动中,影响带疲劳破坏的主要应力是哪些,为什么? 25.(01‘)画图并说明正常工作中V带与主动轮接触弧上带受拉力的变化情况。 26。(02’)试述带传动张紧装置的三种类型。其中一种装置的张紧轮应该布置再什么位置? 27.(03‘)带传动中为什么限制了d1>dmin? PS:这些都是95~2004年真题中整理出来的,如果发现其中某一年没有(如上面的98’)并不是我忘了敲上来,是因为那年本章没有出题。
电路原理1复习题B 1 选择题:请把选中的题号填入括号中。 (1) 一电路元件的电压U=10V,电流I=10A,电压和电流为关联方向。则该元件吸收的电功率为( ) A 100瓦特 B -100瓦特 C 其它 (2) 诺顿定理的等效电路是由( )构或的。 A 电流源和入端电阻并联 B 电压源和入端电阻并联 C 其它 (3) 星形连结的对称三相电路,线电压和相电压( )。 A 相位相同 B 有效值相同 C 其它 (4) RLC串联电路,R为100欧姆、L为l00毫享、C为10微法。其诣振的频率为( )。 A 10-3HZ B 103HZ C 其它 (5) 一阶电路的全响应等于( )。 A 零输入与零状态响应的差 B 零输入与零状态响应的和 C 其它 2 判断题:判断论述是正确(Y) 还是错误(N) ,并填入括号中。 (1) 图中R 1=6Ω, R 2 =4 Ω, R 3 =3 Ω, U S1 =12V, U S2 =24V。则电流I 1 =2A.( ) (2) 复阻抗Z=R+jX,在Z的等效电路中电阻和电抗应该是串联关系。( ) (3) 对称三相电源线电压为380V,Z=6+j4Ω,Z l =2+j2Ω。则负载Z的相电压 U P=220V。() (4) 图示电路,t=0 时将开关K闭合,t<0时电路已达稳态,电流i2(0)=5 mA 。( ) (5) 二阶电路的固有频率为共扼根时,该电路的动态过程是欠阻尼振荡的。( ) 3 计算题 (1) 求图中电流I 2 。
(2) 电路如图所示,已知电容电压u C (0-)=0, t=0打开开关,求t 0的u C (t) 及u R (t)。 电路原理1复习参考答案1 选择题 (1) A (2) A (3) C (4) B (5) B 2 判断题 (1) Y (2) Y (3) N (4) Y (5) Y 3 计算题 (1) I2=2.5A. (2) u C (t)=120(1-e-33333t)V, u R (t)= 120-48e-33333t V.
2014年硕士研究生统一入学考试 《电路原理》 第一部分考试说明 一、考试性质 电路原理是电力系统及其自动化、电力电子与电力传动、电工理论与新技术电气、电气工程学科硕士生入学考试的专业基础课。考试对象为参加东北大学信息学院2014年全国硕士研究生入学考试的准考考生。 二、考试形式与试卷结构 (一)答卷方式:闭卷,笔试 (二)答题时间:180分钟 (三)考试题型:计算综合题 (四)参考书目 电路原理,吴建华、李华,机械工业出版社,2009年9月。 第二部分考查要点 (一)电路基本定律 1.电路基本变量 2.耗能元件与储能元件 3.独立电源和受控电源 4.基尔霍夫定律 5.电阻的联结及等效变换 6.电源的联结及等效变换 (二)线性电阻网络分析 1.支路电流法 2.回路电流法 3.节点电压法 4.叠加原理
5.等效电源定理 6.特勒根定理 7.互易定理 (三)正弦稳态电路分析 1.正弦量的相量表示 2.RLC元件伏安特性的相量形式 3.基尔霍夫定律的相量形式及电路的相量模型 4.阻抗与导纳 5.正弦稳态电路的分析计算 6.正弦交流电路的功率 (四)三相电路 1.对称三相电路的计算 2.不对称三相电路的分析 3.三相电路的功率 (五)互感电路与谐振电路 1.含互感电路的分析计算 2.空心变压器和理想变压器 3.串联谐振电路的分析计算 4.并联谐振电路的分析计算 (六)周期性非正弦稳态电路分析 1.非正弦周期量的有效值和平均功率 2.非正弦周期电流电路的分析计算 3.滤波器的概念 (七)线性动态网络时域分析 1.一阶电路的零输入响应和零状态响应 2.一阶电路的全响应
微机原理复习题 一、选择题 1. 8086系统在最大模式增加总线控制器 A. 提高总线驱动能力 C.解决总线的共享控制和产生总线控制信号 年诞生至今已经历四个发展阶段,但 就其工作原理而言,都基于 A 、二进制 B 、存储程序 C 、程序控制 D 、存储程序和程序控制 3.微处理器主要包括( MOV AL, FFH ADD AL, 01H 6. 8086/8088 CPU 内部有一个始终指示下条指令偏移地址的部件是 8088/8086系统中,可以用于间接寻址的寄存器为 冯诺依曼提出的(AB )概念。 8288的目的___C ______ B.控制协处理器工作 D.以上都不是 2. 电子计算机自 1946 A. 运算器和总线接口 B. 控制器和寄存器组 C.运算器和寄存器组 D.运算器、控制器、寄存器组、总线接口 4.指令 MOV AX, MASK[BX][SI] 中源操作数的寻址方式为 (D A.寄存器寻址 B. 变址寻址 C.基址变址寻址 D.相对基址变址寻址 5.执行下列两条指令后, 标志位 CF 为(C ) A.为0 B. 变反 C.为1 D. 不变 A.SP B.CS C.IP D.BP 7. 8. 9. 10. A. BX ,SI ,DI ,BP B. AX ,SI ,CX , BP C. AX , BX , CX , DX 在DMA 方式下,将内存数据传送到外设的路径是 A.CPU T DMA T 外设 B.内存T 数据总线 T 外设 C.内存T CPU T 总线T 外设 从8086CPU 的内部结构看,其是由 A.控制器和20位物理地址加法器 C.执行单元和总线接口单元 RESET 信号有效后, A. 0FFFFFH D.内存 T DMA T 数据总线 T 外设 两部分组成 B.运算器和总线接口 D.控制器和运算器 8086CPU 的启动地址_C B. 0FFFFH C. 0FFFF0H D. 00000H
东北大学机械设计历年真题(简答题)分类解析 第一章.基础知识 1.(95‘)试画出材料的疲劳极限线图,标出特殊点的坐标,并说明等效系数的意义。 2.(95‘)什么是可靠性设计准则?为什么要建立可靠性设计准则? 3.(96‘)承受静载荷作用的零件,试举例说明能否在危险截面上产生变应力作用? 4.(97‘)机械零件的胶合失效是如何产生的? 5.(97‘)机械零件上那些位置容易产生应力集中? 6.(98‘)用文字描述迈内尔理论。 7.(99‘)在进行机械零件有限寿命的疲劳强度计算时,需要将材料的疲劳曲线修正为零件的疲劳曲线,有几种修正方法?各有何有缺点? 8.(99‘)机械零件的主要失效形式有那些? 9.(01‘)静强度设计和疲劳强度设计主要共同点和不同点是什么? 10(02‘)一承受非对称循环变应力作用的机械零件(应力循环特性r=常数)。试画图说明其有限寿命的疲劳强度计算方法(过程)。 11.(03‘)何谓应力集中?对零件的静强度、疲劳强度影响是否相同? 12(03‘)线性疲劳损伤累积方程(Miner方程)的意义是什么? (04‘无简答题) 第二章.螺纹联结和轴毂联结 13.(95‘)试画出铰制孔用螺栓联结的结构图。 14.(98’)螺栓组受力分析的目的是什么?
15(99‘)为什么螺栓联结需要防松?放松的实质是什么?有哪几种防松措施? 16(00’)花键联结有哪几种?它的定心方式如何? 17(01‘)测力矩扳手和定力矩扳手是利用什么原理来测定螺纹联结预紧力的? 18(02’)当螺栓联结受到轴向工作载荷F后,螺栓伸长的增量△δL和被联结件的变形量的恢复量△δF是什么关系,为什么? 19.(02‘)试述花键联结的主要优点。 20(03’)平键联结设计中,键的尺寸bXhXL是怎么确定的? (04‘无简答题) 第三章带传动 21。(96‘)试述带传动设计准则,并说明哪种失效形式限制了带传动的承载能力? 22.(97’)V带传动中,张紧装置应该放在什么位置?为什么? 23.(99‘)在设计V带传动时,为什么要限制带的根数?限制条件如何? 24.(00’)在普通V带传动中,影响带疲劳破坏的主要应力是哪些,为什么? 25.(01‘)画图并说明正常工作中V带与主动轮接触弧上带受拉力的变化情况。 26。(02’)试述带传动张紧装置的三种类型。其中一种装置的张紧轮应该布置再什么位置? 27.(03‘)带传动中为什么限制了d1>dmin? 第四章链传动 28.(96‘)试述减小滚子链传动动载荷的主要方法。 29。(97’)链传动的失效形式有哪几种? 30(98‘)链传动产生的动载荷有那些? 31(99’)链传动的运动不均匀性产生的原因是什么? 32(01‘)写出正常工作情况下限制链传动的主要失效形式? 33(02’)影响链传动的晕倒均匀性的主要参数有哪些?为什么? 34(03‘)链传动中,节距P的大小对运动均匀性有什么影响? 35(03’)链传动中,为什么要限制大链轮的齿数Z小于150? 第五章齿轮传动 36.(95‘)某厂有一开式齿轮传动,轮齿发生折断,试提出可能的改进措施。 37(96’)试提出防止和减缓齿轮齿面出现点蚀失效的措施。 38。(97‘)一对齿轮传动,哪个齿轮齿面的接触应力大?那个齿轮齿根的弯曲应力大?39。(99’)直齿圆柱齿轮进行弯曲疲劳计算时,其危险截面是如何确定的? 40.(00‘)闭式齿轮传动中,阮、硬齿面齿轮传动在失效形式上有何主要区别? 41.(01’)建立标准直齿锥齿轮传动强度计算模型的依据是什么?忽略了什么因素的影响?42。(02‘)请列出齿轮传动的主要失效形式。 43.(03’)齿轮传动设计中,齿形系数YFa与哪些因素有关? 44(03‘)齿轮传动的动载荷系数K=KAXKVXKαXKβ中,kv考虑的是什么因素的影响?45(03’)与链传动、带传动相比,齿轮传动有哪些主要优点? 46(03‘)闭式软齿面齿轮的主要失效形式和设计准则是什么?有那些提高承载能力的措
东北大学 2010年攻读硕士学位研究生复试试题 答案必须写在答题纸上,否则试卷无效考试科目:机械原理 一、(29分)(1)试判断图示(a)、(b)两运动时是否确定?说明理由。如果运动确定,请对其进行机构分析:如果运动不确定,请画出使其具有确定运动的修改。 二、(20分)在图示连杆机构中,已知各构件尺寸为l AB=25mm,l BC=32mm,l CD=30mm,l AD=20mm(CD ⊥DE),构件AB为主动件,沿顺时针方向匀速转动,试回答下列问题: (1)判断四杆机构ABCD的类型,并说明理由; (2)画出当滑块处于极限位置时四杆机构ABCD的位置; (3)该机构是否具有急回特性?为什么? (4)若取滑块为主动件,问该机构有无死点位置?并列出常用的两种解决死点位置的方法。 三、(18分)在如图所示机构中,已知构件1及构件3对其回转轴心的转动惯量分别为J1=0.6Kgm2,J3=0.4kgm2,作用于构件1上的驱动力矩T1=60N.m,作用于构件3上的阻力矩T3=45N.m,其他构件的质量和转动惯量忽略不计,试回答下列问题: (1)标出机构的所以瞬心; (2)计算取构件1为等效构件时的等效转动惯量J c及等效阻力矩T cr; (3)画出取构件1为等效构件时的等效动力学模型。
四、(20分)如图所示的轮系,已知各轮齿数分别为Z1=Z3=25,Z3ˊ=30,Z4=18,Z4ˊ=28各轮模数相同,均为标准齿轮,求齿数Z3及转动比I ts。若已知锥齿轮Ⅰ的转向n;如图所示,试判断锥齿轮3的转向。 五、(20分)试设计一偏置直动尖顶从动件盘形凸轮机构的凸轮轮廓曲线,从动件烦人类速度sˊ和类加速度s″的部分线图如图(a)所示,凸轮的基圆半径为25mm,偏距e为10mm,从动件的行程h=30mm;推程的起点A如图(b)所示,要求在答题纸上绘制从动件的位移曲线及舆论轮廓曲线,并标出凸轮的合理转向,说明哪些位置有冲击以及冲击的性质。 六、(22分)一对渐开线标准直齿圆柱齿轮外啮合传动,已知:Z1=20,Z2=40,a=20o,h a*=1,C*=0.5,m=5mm,
目录
1 设计任务书 1.1 题目名称 设计胶带输送机的传动装置 1.2 工作条件 1.3 技术数据
2 电动机的选择计算 2.1 选择电动机系列 根据工作要求及工作条件应选用三相异步电动机,封闭式结构,电压380伏,Y 系列。 2.2 滚筒转动所需要的有效功率 传动装置总效率 3 52ηηηηη=承齿联筒 查表17-9得 所以 37 =0.970.990.96=0.817η?? 2.3 确定电动机的转速 滚筒轴转速 min /5.1160r D v n W == π 所需电动机的功率 kW kW P P w r 5.570.4817 .084 .3<== = η 1000r/min,满载转速960r/min 。查表27-2,电动机中心高 H=132mm ,外伸段 D ×E=38mm ×80mm 3 传动装置的运动及动力参数计算 3.1 分配传动比 3.1.1 总传动比 48.835 .119600=== W n n i 3.1.2 各级传动比的分配 查表17-9 取656==i i 开 减速器的传动比 913.136 48 .83=== i i i 高速级齿轮传动比253.4913.1330.130.112=?== i i 低速级齿轮传动比 271.3253 .4913 .131234=== i i i
3.2 各轴功率、转速和转矩的计算 3.2.0 0轴 P=4.70kw, n=960r/min, T=9.55*4.70/960=46.76N*m 3.2.1 Ⅰ轴(高速轴) 3.2.2 Ⅱ轴(中间轴) 3.2.3 Ⅲ轴(低速轴) 3.2.4 Ⅳ轴(传动轴) 3.2.5 Ⅴ轴(卷筒轴) 3.3 开式齿轮的设计 3.3.1 材料选择 小齿轮:45#锻钢,调质处理,齿面硬度217--255HBS 大齿轮:45#锻钢,正火处理,齿面硬度162--217HBS 3.3.2 按齿根弯曲疲劳强度确定模数 按齿面硬度217HBS 和162HBS 计算 初取小齿轮齿数 205=Z 则大齿轮齿数 1206205656=?==i Z Z 计算应力循环次数 查图5-19 0.165==N N Y Y 查图5-18(b) pa 2705lim M F =σ,pa 2006lim M F =σ 由式5-32 0.165==X X Y Y 取 0.2=ST Y ,4.1min =F S 计算许用弯曲应力 由式5-31 []X N F ST F F Y Y S Y min lim σσ= 查图5-14 21.2,81.265==Fa Fa Y Y 查图5-15 78.1,56.165==Sa Sa Y Y 则 []011365.07 .38556 .181.25 5 5=?= F Sa Fa Y Y σ 取 [] 013769.0}][,][max { 6 6 6555==F Sa Fa F Sa Fa F Sa Fa Y Y Y Y Y Y σσσ
东北大学机械设计基础考研真题(2012)回忆版 一、简答12*5分 1 自由度计算(书P10 行星轮的自由度计算) 2 曲柄存在条件,四杆机构基本形式(形式判断) 3 滚动轴承失效形式,和计算准则 4 蜗轮相比齿轮的优缺点 5 机械原理关于齿轮模数,齿顶齿根圆计算 6 链传动关于节距的选择 7 打滑和弹性滑动的特点和不同点 8 齿轮点蚀机理和解决办法 9 液压油膜形成条件 10 轴分类及定义 11 为什么齿宽系数不能太大不能太小 12 (忘记了) 二轮系计算(混合轮系)10分 三凸轮设计(由从动件运动曲线画出图论形状)10分 四螺栓载荷和变形线图及相应计算(书P123螺栓连接的载荷与变形曲线)15分 五齿轮受力分析(斜齿轮、蜗轮蜗杆、锥齿轮混合)15分 六轴承计算(书P241类似)20分 七轴结构错误并画出正确图形(P220 西工大课本比较详细,可以参考)20分
东北大学-机械设计基础考研真题(2013) 一、简答题(10*5=50分) 1.判断图1的四杆机构属于哪种类型,并说明理由。 2.采用变位蜗杆传动目的是什么?变位蜗杆传动中为什么只对蜗轮 进行变位? 2.试写出普通V带传动不发生打滑失效条件下,影响因素有哪些?如何影响的? 3.计算图2所示机构自由度,若存在虚约束、局部自由度、复合铰链请指出。 4.图解法设计凸轮轮廓方法是什么?简单描述其原理。 5.经测量的齿数98的某渐开线标准直齿圆柱齿轮齿顶圆直d a=225,试求其模数,分度圆直径和齿根圆直径。 6.根据液体动压润滑一维雷诺方程,说明形成动压润滑的必要条件。 7.联轴器选择的原则。 8.改善载荷沿齿向分布不均匀的措施。 9.画图说明带传动的应力分布,表示出最大应力出现的位置。 二、(10分)如图所示卷扬机齿轮机构,已知Z1=24,Z2=48,Z2’=30,
机械设计基础课程设计说明书题目:设计胶带输送机的传动装置。 班级:冶金0905班 姓名:张树才 学号:20091428 指导教师:闫玉涛 成绩: 2011年 7月16日
一、设计任务书 (1) 设计题目 :设计胶带输送机的传动装置 (2) 工作条件 (3) 技术数据 二、电动机的选择计算 (1)选择电动机系列 根据工作要求及工作条件应,选用三相异步电动机, 封闭式结构,电压380伏,Y 系列电动机。 (2)滚筒转动所需要的有效功率 kw FV p w 42.21000 2 .211001000=?== 根据表2-11-1,确定各部分的效率: V 带传动效率 η1 =0.95 一对滚动球轴承效率 η2 =0.99 闭式齿轮的传动效率 η3 =0.97 弹性联轴器效率 η4 =0.99
三、传动装置的运动及动力参数计算 (1)分配传动比 总传动比31.70 == w n n i ;由表2-11-1得,V 带传动的 传动比i 01= 2.5,则齿轮传动的传动比为: i 12=i/i 01=7.31/2.5=2.92 , 此分配的传动比只是初步的,实际传动比的准确值 要在传动零件的参数和尺寸确定后才能确定。并且允许 有(3-5%)的误差。 (2) 各轴功率、转速和转矩的计算 0轴:(电动机轴) P 0=p r =2.91kw ,n 0=960r/min T 0=9550×p 0/ n 0=9550×2.91/960=28.95N ?m 1轴:(减速器高速轴) P 1=p 0×η01= p 0×η1=2.91×0.95=2.76kw
四、传动零件的设计计算 电动机型号为Y132S-6,额定功率0P =3.0kw ,转速为 n 1=960r/min ,减速器高速轴转速n 2=384r/min ,班制是2年, 载荷平稳。 (1)减速器以外的传动零件的设计计算 1.选择V 带的型号 由书中表10-3查得工况系数K A =1.2; Pc=K A .P 0 =1.2×3.0=3.6kw 查表10-4和课本图10-7,可得选用A 型号带, d d1min =75mm;由表10-5,取标准直径,即d d1=100mm; 2.验算带速 V=3.14×d d1×n 1 /(60×1000)=5.024m/s; 满足5m/s <= V<=25-30m/s; 3.确定大带轮的标准直径 d d2=n 1/n 2×d d1=960/384×100=250mm; 查表10-5,取其标准值d d2=250mm ; 验算带的实际传动比:i 实=d d2/d d1=250/100 =2.5; 4.确定中心距a 和带长Ld V 带的中心距过长会使结构不紧凑,会低带传动的 工作能力;初定中心距a 0, a 0=(0.7-2.0)( d d1 +d d1)=245~~700 mm 取a 0=350mm ,相应 a 0的带基准长度Ld 0: Ld 0=2×a 0+3.14/2 ×( d d1 +d d2)+(d d2 –d d1)2/(4× a 0)
微机原理复习题 一、选择题 1. 8086系统在最大模式增加总线控制器8288的目的___C______ A.提高总线驱动能力 B.控制协处理器工作 C.解决总线的共享控制和产生总线控制信号 D.以上都不是 2. 电子计算机自1946年诞生至今已经历四个发展阶段,但就其工作原理而言,都基于冯·诺依曼提出的(AB )概念。 A、二进制 B、存储程序 C、程序控制 D、存储程序和程序控制 3. 微处理器主要包括( D )。 A.运算器和总线接口 B.控制器和寄存器组 C.运算器和寄存器组 D.运算器、控制器、寄存器组、总线接口 4. 指令MOV AX, MASK[BX][SI]中源操作数的寻址方式为 ( D ) A.寄存器寻址 B.变址寻址 C.基址变址寻址 D.相对基址变址寻址 5. 执行下列两条指令后,标志位CF为 ( C ) MOV AL, FFH ADD AL, 01H A.为0 B.变反 C.为1 D.不变 6. 8086/8088 CPU内部有一个始终指示下条指令偏移地址的部件是(C) A.SP B.CS C.IP D.BP 7. 8088/8086系统中,可以用于间接寻址的寄存器为 A 。 A. BX,SI,DI,BP B. AX,SI,CX,BP C. AX,BX,CX,DX 8. 在DMA方式下,将内存数据传送到外设的路径是 ( B ) A.CPU→DMAC→外设 B.内存→数据总线→外设 C.内存→CPU→总线→外设 D.内存→DMAC→数据总线→外设 9. 从8086CPU的内部结构看,其是由 C 两部分组成 A. 控制器和20位物理地址加法器 B. 运算器和总线接口 C. 执行单元和总线接口单元 D. 控制器和运算器 10. RESET信号有效后,8086CPU的启动地址 C 。 A. 0FFFFFH B. 0FFFFH C. 0FFFF0H D. 00000H
机械设计基础课程设计说明书题目:设计用于胶带运输机的机械传动装置 专业:材料成型及控制工程 班级:成型1104 设计者:鞠英男 学号:20110399 指导教师:陈良玉
目录 1.设计任务书 (2) 1.1.设计题目 (2) 1.2.工作条件 (2) 1.3.技术数据 (2) 2.电动机的选择计算 (2) 2.1.选择电动机系列 (2) 2.2.选择电动机的功率及转速 (2) 2.3.选择电动机的型号 (3) 3.传动装置的运动和动力参数计算 (4) 3.1.分配传动比 (4) 3.2.各轴功率、转速和转矩的计算 (4) 4.传动零件的设计计算 (5) 4.1.减速器以外的传动零件(链传动)的设计计算 (5) 4.2.减速器以内的传动零件(齿轮)的设计计算 (7) 5.轴的设计计算 (10) 5.1.减速器高速轴的设计 (10) 5.2.减速器低速轴的设计 (11) 6.滚动轴承的选择及其寿命计算 (14) 6.1.减速器高速轴滚动轴承的选择及其寿命计算 (14) 6.2.减速器低速轴滚动轴承的选择及其寿命计算 (15) 7.键连接的选择和验算 (18) 7.1.减速器大齿轮与低速轴的键连接 (18) 7.2.小链轮与减速器低速轴轴伸的键连接 (18) 7.3.联轴器与减速器高速轴轴伸的键连接 (18) 8.联轴器的选择 (18) 9.减速器的其他附件 (19) 10.润滑和密封 (19) 10.1.减速器齿轮传动润滑油的选择 (19) 10.2.减速器轴承润滑方式和润滑剂的选择 (20) 10.3.减速器密封装置的选择、通气器类型的选择 (20) 11.整体装配 (20) 12.参考文献 (21)
2016年东北大学838电路原理考研真题(完整版)凯程首发 刚考完2016考研初试,凯程教育的电话瞬间变成了热线,同学们兴奋地汇报自己的答题情况,几乎所有内容都在凯程考研集训营系统训练过,所考专业课难度与往年相当,答题的时候非常顺手,相信凯程的学员们对此非常熟悉,预祝亲爱的同学们复试顺利。考研分笔试、面试,如果没有准备,或者准备不充分,很容易被挂掉。如果需要复试的帮助,同学们可以联系凯程老师辅导。 下面凯程老师把专业的真题全面展示给大家,供大家估分使用,以及2017年考研的同学使用,本试题凯程首发! 一、是求两个电压,图记不太清了,记得有两个电流源,一个电压源,用节点电压法。 二、求最大功率,还是比较简单的,戴维南等效电路就行。 三、小信号的题 四、相量的计算
五、给出了Y参数,让求U1 U2 I1 I2 六、我记得是第六章的一道题,电压源里面有直流分量,基波分量,3次谐波,9九次谐波,好像在基波时有并联谐振,9次谐波有串联谐振 七、关于耦合电路的,这道题是根据K求出wm,然后去耦合。 八、这道题考的是时域分析,用三要素法就行,电路图忘记了。 九、这道题考的是复频域分析,按照所学的套路写就行,没什么难点。 十、缺失
十一、三相电路的题,还有个电压表忘记在哪放着了,上到下是A B C 中线,第一问求三条线的电流,第二问是问开关断开对功率表电压表电流表的影响并说明原因。 十二、是关于空心变压器的知识。L3=0.1H,C3=10uF,其他参数记不清了,这道题是有技巧的,知道R1的电压和阻值,可以求出R1的功率,发现等于功率表读数,就可以知道C3与L3串联谐振,然后再用等效电路将次级等效到原级。
机械原理自测题(二) 一、判断题。(正确的填写“T”,错误的填写“F”)(20分) 1、一对相啮合的标准齿轮,小轮的齿根厚度比大轮的齿根厚度大。( F ) 2、在曲柄滑块机构中,只要原动件是滑块,就必然有死点存在。( T ) 3、两构件之间以点、线接触所组成的平面运动副称为高副,它产生两个约束,而保留一 个自由度。( F) 4、一对直齿轮啮合传动,模数越大,重合度也越大。(F) 5、平面四杆机构有无急回特性取决于极位夹角是否大于零。(T) 6、对于刚性转子,已满足动平衡者,也必满足静平衡。(T) 7、滚子从动件盘形凸轮的基圆半径和压力角应在凸轮的理论轮廓上度量。 (T) 8、在考虑摩擦的转动副中,当匀速转动时,总反力作用线永远切于摩擦圆。(T) 9、当机构的自由度数大于零,且等于原动件数,则该机构具有确定的相对运动。(T) 10、对于单个标准齿轮来说,节圆半径就等于分度圆半径。(F) 二、填空题;(10分) 1、机器产生速度波动的类型有(周期性)和(非周期性)两种。 2、铰链四杆机构的基本型式有(曲柄摇杆机构、双曲柄机构、双摇杆机构)三种。 3、从效率观点分析,机械自锁的条件是(效率小于零)。 4、凸轮的形状是由(从动件运动规律和基圆半径)决定的。 5当两机构组成转动副时,其瞬心与(转动副中心)重合。 三、选择题(10分) 1、为了减小机器运转中周期性速度波动的程度,应在机器中安装(B)。 A)调速器; B)飞轮; C)变速装置。 2、重合度ε α = 1.6 表示在实际啮合线上有(C)长度属于双齿啮合区。 A) 60% ; B)40% ; C)75%。
3、渐开线齿轮形状完全取决于(C)。 A)压力角; B)齿数; C)基圆半径。 3、在从动件运动规律不变的情况下,对于直动从动件盘形凸轮机构,若缩小凸轮的基圆 半径,则压力角(B)。 A)保持不变; B)增大; C)减小。 5、在计算机构自由度时,若计入虚约束,则机构自由度数(B)。 A)增多; B)减小; C)不变。 四、计算作图题(共60分) (注:凡图解题均需简明写出作图步骤,直接在试卷上作图,保留所有作图线。) 1、计算下列机构的自由度(10分) A B C D E F G A B C D E F G H M N 图4-1 图4-1 a) b) H F = 3×6-2×8-1=1 F = 3×5-2×6-2 = 1 2、瞬心法图解图4-2所示凸轮机构从动件的线速度。(10分)
机械原理课程设计说明书题目:牛头刨床机构方案分析 班级: 姓名: 学号: 指导教师: 成绩: 2012年月日
目录 1.题目说明............................................................... 错误!未定义书签。 2.内容要求与作法 (2) 3.滑枕初始位置及行程H的确定方法 (2) 4.机构的结构分析 (3) 5.机构的运动分析 (3) 5-1 所调用杆组子程序中虚参与实参对照表 (3) 5-2主程序、计算结果及运行图像 (4) 6.机构的静力分析 ............................................... 错误!未定义书签。 6-1杆组运动分析子程序函数及形参实值对照表 (6) 6-2主程序、运行结果及运算图像 ................ 错误!未定义书签。7.飞轮转动惯量计算 . (12) 7-1飞轮转动惯量的计算方法 (12) 7-2飞轮转动惯量的程序及计算结果 (12) 8.主要收获与建议 (15) 9.参考文献 (15)
1.题目说明 (图a)所示为牛头刨床主机构的运动简图,已知, l1=0.1m,l0=0.4m,l3=0.75m,l4=0.15m,l y=0.738m,l′3=0.375m,a=0.05m,b=0.15,c=0.4m,d =0.1m。只计构件3、5的质量,其余略去不计,m3=30kg,J s3=0.7kg·m2,m5=95kg。工艺阻力Q如图所示,Q=9000N。主轴1的转速为60r/min(顺时针方向),许用运转不均匀系数[δ]=0.03。 2.内容要求与作法 1.进行运动分析,绘制滑枕5的位移、速度和加速度线图。 2.进行动态静力分析,绘制固定铰链处的反力矢端图金额平衡力矩Tb的线图。 3.以主轴为等效构件,计算飞轮的转动惯量。 上机前认真读懂所用子程序,自编主程序,初始位置取滑枕5的左极限位置。3.滑枕初始位置及行程H的确定方法 滑枕初始位置为左极限位置,此时构件1和构件3在O1O2左侧垂直;滑枕行程H由运动分析的结果得知。滑枕的左极限位置为-0.337,右极限为0.038,所以行程为0.375;
绪论 一、判断题(正确T,错误F) 1. 构件是机械中独立制造的单元。() 2. 能实现确定的相对运动,又能做有用功或完成能量形式转换的机械称为机器。() 3. 机构是由构件组成的,构件是机构中每个作整体相对运动的单元体。() 4. 所有构件一定都是由两个以上零件组成的。() 二、单项选择题 1. 如图所示,内燃机连杆中的连杆体1是()。 A 机构 B 零件 C 部件 D 构件 2. 一部机器一般由原动机、传动部分、工作机及控制部分组成, 本课程主要研究()。 A 原动机 B 传动部分 C 工作机 D 控制部分 三、填空题 1. 构件是机械的运动单元体,零件是机械的______单元体。 2. 机械是______和______的总称。 参考答案 一、判断题(正确T,错误F) 1. F 2. T 3. T 4. F 二、单项选择题 1. B 2. B 三、填空题 1. 制造 2. 机构机器 第一章平面机构的自由度 一、判断题(正确T,错误F) 1. 两构件通过点或线接触组成的运动副为低副。() 2. 机械运动简图是用来表示机械结构的简单图形。() 3. 两构件用平面低副联接时相对自由度为1。() 4. 将构件用运动副联接成具有确定运动的机构的条件是自由度数为1。() 5. 运动副是两构件之间具有相对运动的联接。() 6. 对独立运动所加的限制称为约束。() 7. 由于虚约束在计算机构自由度时应将其去掉,故设计机构时应尽量避免出现虚约束() 8. 在一个确定运动的机构中,计算自由度时主动件只能有一个。() 二、单项选择题 1. 两构件通过()接触组成的运动副称为高副。 A 面 B 点或线 C 点或面 D 面或线
目录 一、设计任务书 (3) 二、电动机的选择计算 (4) 三、传动比的分配: (5) 四、传动装置的运动和动力参数: (6) 五、闭式齿轮传动设计: (9) (一)高速级齿轮的设计: (9) ( 1 ) 材料的选择: (9) ( 2 ) 按齿面接触强度确定中心距并确定有关参数和几何尺寸 (10) ( 3 ) 验算齿面接触疲劳强度 (11) ( 4 ) 验算齿根弯曲疲劳强度 (13) ( 5 ) 齿轮主要几何参数 (14) (二)低速级齿轮的设计: (15) ( 1 ) 材料的选择: (15) ( 2 ) 按齿面接触强度确定中心距并确定有关参数和几何尺寸 (16) ( 3 ) 验算齿面接触疲劳强度 (17)
( 4 ) 验算齿根弯曲疲劳强度 (19) ( 5 ) 齿轮主要几何参数 (20) 六、开式齿轮的设计 (21) ( 1 ) 选择材料 (21) ( 2 ) 齿根弯曲疲劳强度确定模数 (21) ( 3 ) 齿轮主要几何参数 (24) 七、轴的设计及计算及联轴器的选择 (24) (一)初步确定轴的直径 (24) ( 1 ) 高速轴的设计 (24) ( 2 ) 中间轴的设计 (25) ( 3 ) 低速轴的设计 (25) (二)低速轴的强度校核 (272) ( 1 ) 有关参数及支点反力 (272) (三)高速轴的强度校核 (337) (四)中间轴的强度校核 (347) 八.滚动轴承的选择及寿命验算 (358) (一)初选滚动轴承的型号 (358) (二)轴承寿命验算 (358) ( 1 ) 低速轴轴承寿命验算 (358) ( 2 ) 中间轴的轴承寿命验算 (379) ( 3 ) 高速轴的轴承寿命验算 (30)
目录 1 设计任务书 (2) 1.1 题目名称设计胶带输送机的传动装置 (2) 1.2 工作条件 (2) 1.3 技术数据 (3) 2 电动机的选择计算 (3) 2.1 选择电动机系列 (3) 2.2 滚筒转动所需要的有效功率 (3) 2.3 确定电动机的转速 (3) 3 传动装置的运动及动力参数计算 (3) 3.1 分配传动比 (3) 3.1.1 总传动比 (4) 3.1.2 各级传动比的分配 (4) 3.2 各轴功率、转速和转矩的计算 (4) 3.2.1 Ⅰ轴(高速轴) (4) 3.2.2 Ⅱ轴(中间轴) (4) 3.2.3 Ⅲ轴(低速轴) (4) 3.2.4 Ⅳ轴(传动轴) (5) 3.2.5 Ⅴ轴(卷筒轴) (5) 3.3 开式齿轮的设计 (5) 3.3.1 材料选择 (5) 3.3.2 按齿根弯曲疲劳强度确定模数 (5) 3.3.3 齿轮强度校核 (6) 3.3.4 齿轮主要几何参数 (8) 4 闭式齿轮设计 (8) 4.1 减速器高速级齿轮的设计计算 (8) 4.1.1 材料选择 (8) 4.1.2 按齿面接触疲劳强度确定中心距 (9) 4.1.3 验算齿面接触疲劳强度 (10) 4.1.4 验算齿根弯曲疲劳强度................................................................................ - 11 - 4.1.5 齿轮主要几何参数.......................................................................................... - 2 - 4.2 减速器低速级齿轮的设计计算 ...................................................................... - 3 - 4.2.1 材料选择.......................................................................................................... - 3 - 4.2.2 按齿面接触疲劳强度确定中心距.................................................................. - 3 - 4.2.3 验算齿面接触疲劳强度.................................................................................. - 5 - 4.2.4 验算齿根弯曲疲劳强度.................................................................................. - 6 - 4.2.5 齿轮主要几何参数.......................................................................................... - 7 - 5 轴的设计计算 ...................................................................................................... - 7 - 5.1 高速轴的设计计算 .......................................................................................... - 7 - 5.2 中间轴的设计计算 .......................................................................................... - 8 - 5.3 低速轴的设计计算 .......................................................................................... - 8 -
东北大学机械设计基础(机械工程、专硕)怎么复习 今年我以业课考了140+分的,有点受宠若惊,特发一帖希望能帮助2016年考东北大学的学弟学妹们。 温馨提示:考研的道路是自己慢慢摸索,然后找到符合自己最有效的那条路,要有信心,不管碰到什么困难,考研的路开始还信心满满,越往后你会发现考的 人越少了,放弃的人越多了,你越孤独了。不要紧考研就是个磨练心智的过程,加油! 我这里只说说专业课的复习方法,因为其他的考研辅导班都有的说,大家都知道了(建议不要报辅导班,现在网上有免费的视频,7大辅导机构视频)。 1、先给大家普及一下东大专业课的潜规则: 科目:专硕考的是机械设计基础。 内容:机械设计、机械原理。 题型:概念题、计算题。 难度:相当简单,一般都考120左右。 误区:有人说东大专业课简单。这是真的,但是简单也是要得高分的,什么算是高分呢?120分,可以轻松得到的,但是不是高分,130+才是高分,想想专业课多得10分容易,还是数学英语多得10分容易?千万不要以为简单就放低对分数的追求! 要求:计算题一分不丢(考高分考的是概念题),120分的专业课,在东北大学是低分,要想得高分130+。 其他:这些是真是不敢公开说了,这个是东大判卷的内幕,也是大家关心的,对大家放松心态,和备战非常重要,外校的不知道,有需要了解的以后在谈吧。 2、机械设计基础的复习方法: 对于目标在120分的同学,这样的同学,可以在暑假的时候看专业课,因 为东北大学的专硕考的是机械设计基础,简单易懂,计算题出题很死,把真题都做一遍,就没有问题了。对于目标是130+的同学,需要在5月份的时候就开始
看概念题,概念题是日积月累的,需要把书本吃透,无死角。对于真题,机械设计基础到目前位置只有6套题,是2010年开始考的,参考的题目很少,需要大家看学术真题,也就是机械设计。但是机械设计有的地方是专硕不考的,大家不要看,只看考的就可以。而且拿2015年来说,有一个计算题考的就是,学术的2004年真题,原题,连数据都没有变,如图2.1,图2.1所示。 图2.1 2015年机械设计基础(专硕)真题
1设计任务书 ................................ 1.1题目名称设计胶带输送机的传动装置 ................... 1.2工作条件 ............................... 1.3技术数据 ............................... 2电动机的选择计算 ............................. 2.1选择电动机系列 ............................ 2.2滚筒转动所需要的有效功率 ....................... 2.3确定电动机的转速 .......................... 3传动装置的运动及动力参数计算 ...................... 3.1分配传动比 ............................. 3.1.1总传动比........................ 3.1.2 各级传动比的分配 .................... 3.2各轴功率、转速和转矩的计算 ..................... 321 I轴(高速轴)......................... 3.2.2U轴(中间轴)..................... 3.2.3川轴(低速轴)...................... 3.2.4W轴(传动轴)...................... 3.2.5V轴(卷筒轴)...................... 3.3开式齿轮的设计 ............................ 3.3.1材料选择........................ 3.3.2按齿根弯曲疲劳强度确定模数................ 3.3.3齿轮强度校核....................... 3.3.4齿轮主要几何参数.................... 4闭式齿轮设计 .............................. 4.1减速器高速级齿轮的设计计算 ..................... 4.1.1材料选择........................ 4.1.2按齿面接触疲劳强度确定中心距............... 4.1.3验算齿面接触疲劳强度...................