?1554? 计算机测量与控制.2006.14(11) Computer Measurement &Control
设计与应用
中华测控网https://www.doczj.com/doc/3215621834.html,
收稿日期:20060301; 修回日期:20060419。
作者简介:汤阳(1971),男,大学,主要从事工业自动化方向的研究。
文章编号:16714598(2006)11155403 中图分类号:TP242 文献标识码:B
家用自主吸尘机器人的研究和开发
汤 阳,戴光智,王锐鹏
(浙江巨化股份有限公司,浙江衢州 324004)
摘要:介绍了一种新型家用智能吸尘器,该吸尘器采用基于地图的全覆盖路径规划的方法,能在无人情况下自主工作,并且具有自动回避障碍等功能;文中详细介绍了基于地图的全覆盖路径规划算法的实现方法及其软件仿真,并对吸尘器的测控系统根据算法设计的要求进行了研究和设计;通过作者开发的算法仿真软件和设计的吸尘器测控系统实验模型的仿真和实验结果表明,文中介绍的这种基于地图的全覆盖路径规划方法的家用智能吸尘器在实际应用中是可行的。
关键词:全覆盖算法;环境模型;电子地图;路径规划;避障;红外线测距
R esearch &Development on H ome Intelligent Cleaner
Tang Yang ,Dai Guangzhi ,Wang Ruipeng
(Zhejiang J uhua Co.,ltd ,Quzhou 324004,China )
Abstract :A new type of home intelligent cleaner is introduced ,it adopt s a kind of new met hod of t he complete floor coverage pat h plan 2ning according to t he electronic map ,and has t he ability of autonomous working under t he situation wit hout people and t he functions of auto obstacle detection and obstacle avoidance.
K ey w ords :complete coverage algorit hm ;environment module ;electric map ;pat h planning ;obstacle avoidance ;infrared ranging
0 引言
吸尘机器人将移动机器人技术和吸尘器技术有机地融合起来,实现室内环境(地面)的半自动或全自动清洁,替代传统繁重的人工清洁工作,近年来已受到国内外的研究重视。作为智能移动机器人的一个特殊应用[1],从技术层面上讲,智能化自主式吸尘器比较具体地体现了移动机器人的多项关键技术[2],具有较强的代表性。从市场前景角度讲,自主吸尘器将大大降低劳动强度,提高劳动效率,适用于家庭和公共场馆的室内清洁[3]。因此开发自主智能吸尘器既具有科研上的挑战性,又具有广阔的市场前景[4]。
本文首先以移动机器人为例,对一个含有障碍物的房间进行环境建模,在此环境模型上,提出具有一定优化能力的全覆盖路径规划的设计目标,从算法设计到计算机仿真进行了相关研究。在回顾并总结国内外移动机器人全覆盖路径规划研究成果的基础上,本文提出了一种面向实用型的具有一定优化能力的全覆盖路径规划算法,并对该算法进行了计算机仿真。用Visual C ++编写的程序运行结果以图形动画的形式表明了该算法的可行性和有效性。
在算法仿真实现的基础上,设计研制了智能吸尘器测控系统实验模型,该模型采用左右两轮步进电机独立驱动,前后两轮万向随动;采用红外传感器阵列探测障碍物和吸尘器导航定位,以实现无碰撞探测障碍物;使用碰撞传感器配合红外线传感器的使用,用于吸尘器和障碍物碰撞后的避障;利用霍尔传感器检测安装在墙壁上的磁铁,用于把障碍物和墙壁做出区分,从而识别出墙壁;系统采用主从式多级单片机控制结构实
现测量与控制。
1 全覆盖路径规划算法及仿真
在本文中,机器人全覆盖任务描述为:移动机器人从“家”———基站(待覆盖区域中任意一点)———出发,沿尽可能短的路线或用尽可能短的时间完成整个区域的覆盖工作并返回出发点———基站或指定的某一点。为了实现这个任务,本章介绍了一种采用基于地图的全覆盖路径规划的方法。
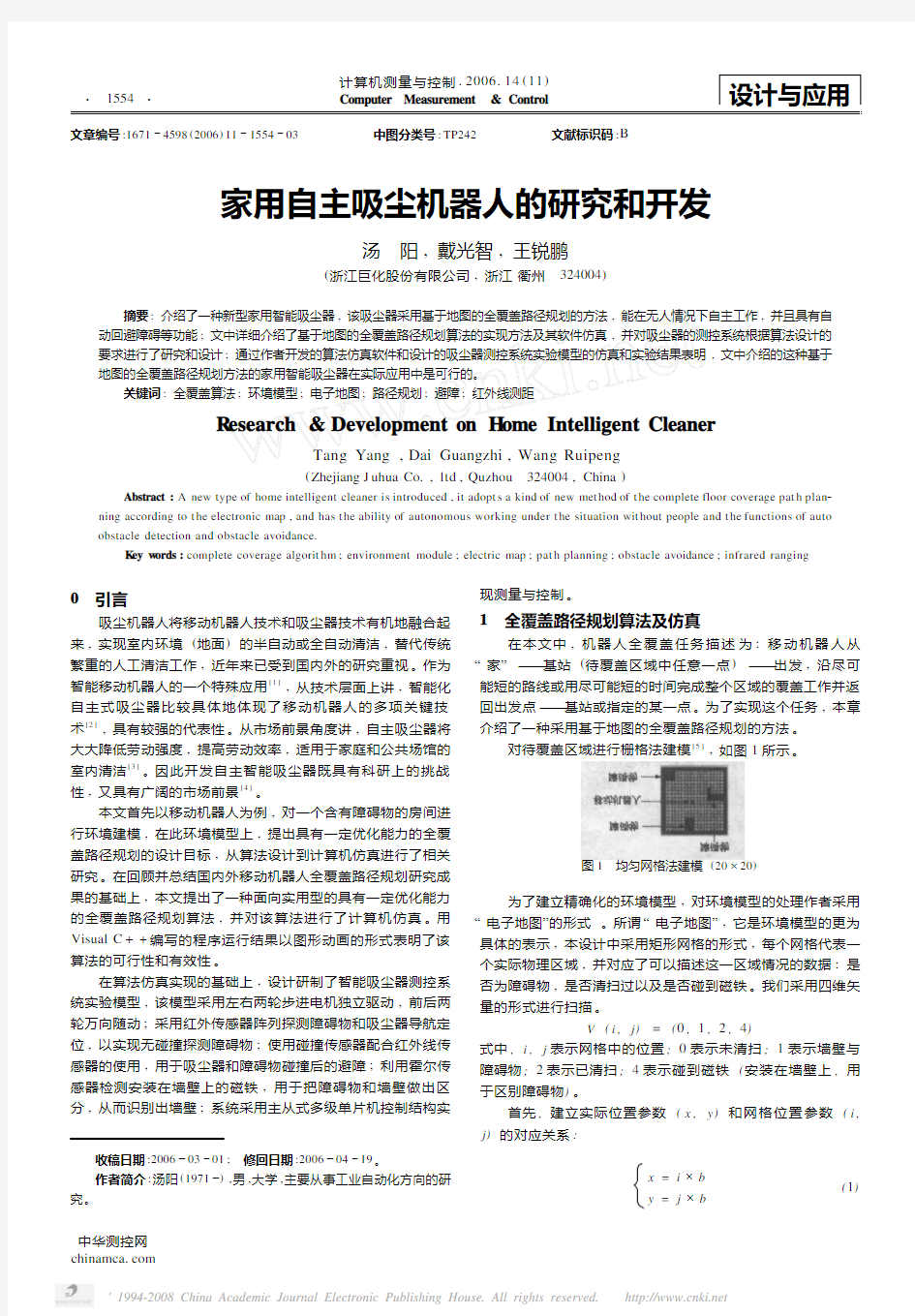
对待覆盖区域进行栅格法建模[5],如图1所示。
图1 均匀网格法建模(20×20)
为了建立精确化的环境模型,对环境模型的处理作者采用
“电子地图”的形式。所谓“电子地图”,它是环境模型的更为具体的表示,本设计中采用矩形网格的形式,每个网格代表一个实际物理区域,并对应了可以描述这一区域情况的数据:是否为障碍物,是否清扫过以及是否碰到磁铁。我们采用四维矢量的形式进行扫描。
V (i ,j )=(0,1,2,4)
式中,i ,j 表示网格中的位置;0表示未清扫;1表示墙壁与障碍物;2表示已清扫;4表示碰到磁铁(安装在墙壁上,用于区别障碍物)。
首先,建立实际位置参数(x ,y )和网格位置参数(i
,j )的对应关系:
x =i ×b y =j ×b
(1)
第11期汤 阳,等:家用自主吸尘机器人的研究和开发 ?1555?
中华测控网
https://www.doczj.com/doc/3215621834.html,
式中,x ,y 为定位系统计算出的位置参数;b 为单位网格的边
长。
公式(1)将房间地面进行离散化处理,生成了一个矩形网格。则矩形边长L 和宽W 分别为
L =x max b L =y max b
(2)
然后建立一个映射关系,将存储空间地址和实际清扫房间的位置联系起来。通过这个映射关系可以根据位置坐标访问相应的存储器地址,进行一定的操作,比如对各标志进行查询和写入。
本设计中,电子地图的建立需要两个学习(或称探测)过程,沿边学习和遍历学习[6]。111 沿边学习
当机器人探测到墙壁以后,则开始进行沿边学习,此过程是为了摸清房间的大小和轮廓。沿边学习,就是让机器人沿着墙边移动,在移动过程中,可以不断根据与墙边的距离调整所走方向,这样对于在移动中自身坐标不是很确定的移动机器人来说,可以辅助周边的事物对其当前位置进行调整。这就是沿边学习的长处所在。沿边学习的过程中,会遇到以下几种情况:
(1)墙边的障碍区:对于墙边存在的障碍物,例如衣柜、沙发等,机器人会把这些障碍物当作墙壁来处理。而对于不在墙边的障碍物,机器人在沿边学习过程中是不会碰到的,所以不予理会。需补充的是,在整个的算法的设计中,机器人只对碰到的障碍物予以处理,而对于没有碰到,但通过红外线传感器探测到的障碍物,同样不予处理。
(2)机器人自身的定位:为了实现环境模型的坐标系和电子地图坐标系的转换,机器人自身的坐标是相当重要的。相对于机器人转弯的角度误差,我们较为相信机器人步进电机前进时的距离信息。这也是采用沿边学习算法的主要因素之一。在算法中,机器人每走一格,即步进电机的固定的一个步数,则进行一次环境地图和电子地图的一次转换,也就是机器人所了解的每个栅格的信息直接与环境中某区域对应。一直当机器人完整走完一圈,则沿边走地图转换过程才完成。
在进一步的学习之前,必须在“电子地图”中将闭合曲线之外的区域“标帜”为障碍物。在接下来的工作中机器人遇到
障碍物时,查询“电子地图”就可以判断是否到达边际,这是机器人进行遍历学习的重要前提。处理结果如图2所示。
图2 沿边学习之后的电子地图
112 遍历学习
此过程是机器人从上到下或从左到右直线前进,检测到障碍物就绕行,绕过障碍物后要保持在原来的方向上,最终到达
“电子地图”的边际;然后向左或上平移一个车距,以相反的方向往回走。机器人在行走过程中每走一格都会在电子地图上其周围的四格标示。学习完成之后,需要清扫的区域就全部呈现出来,剩下的就是障碍物了。
另外,除了以上两个学习过程之外,还有一个重要的过程,那就是墙壁的探测,这里包含一个障碍物和墙壁的判别问题。开始清扫时,机器人处于环境的任意位置,这时,机器人按照设定的方式行走,目的时为了寻找墙壁。为了防止机器人把障碍物与墙壁相混淆,在墙壁上设置了磁铁。当机器人遇到了磁铁,这时机器人便知道它已经找到了墙壁,可以执行沿边走的算法了。为研究方便,文中对待覆盖区域最大值设定为20×20个网格,即1×1m 2。
本文算法设计采用b =5cm ,使栅格大小正好和机器人大小相等(机器人大小5×5cm 2),网格数为40×40个,即最大清扫面积为2×2m 2。在仿真时,作者开始时以b =5cm ,仿真的结果较为理想。而后又以
b =1cm 来仿真,结果程序设计变得异常复杂,动态演示时机器人不停的旋转,仿真效率很低。
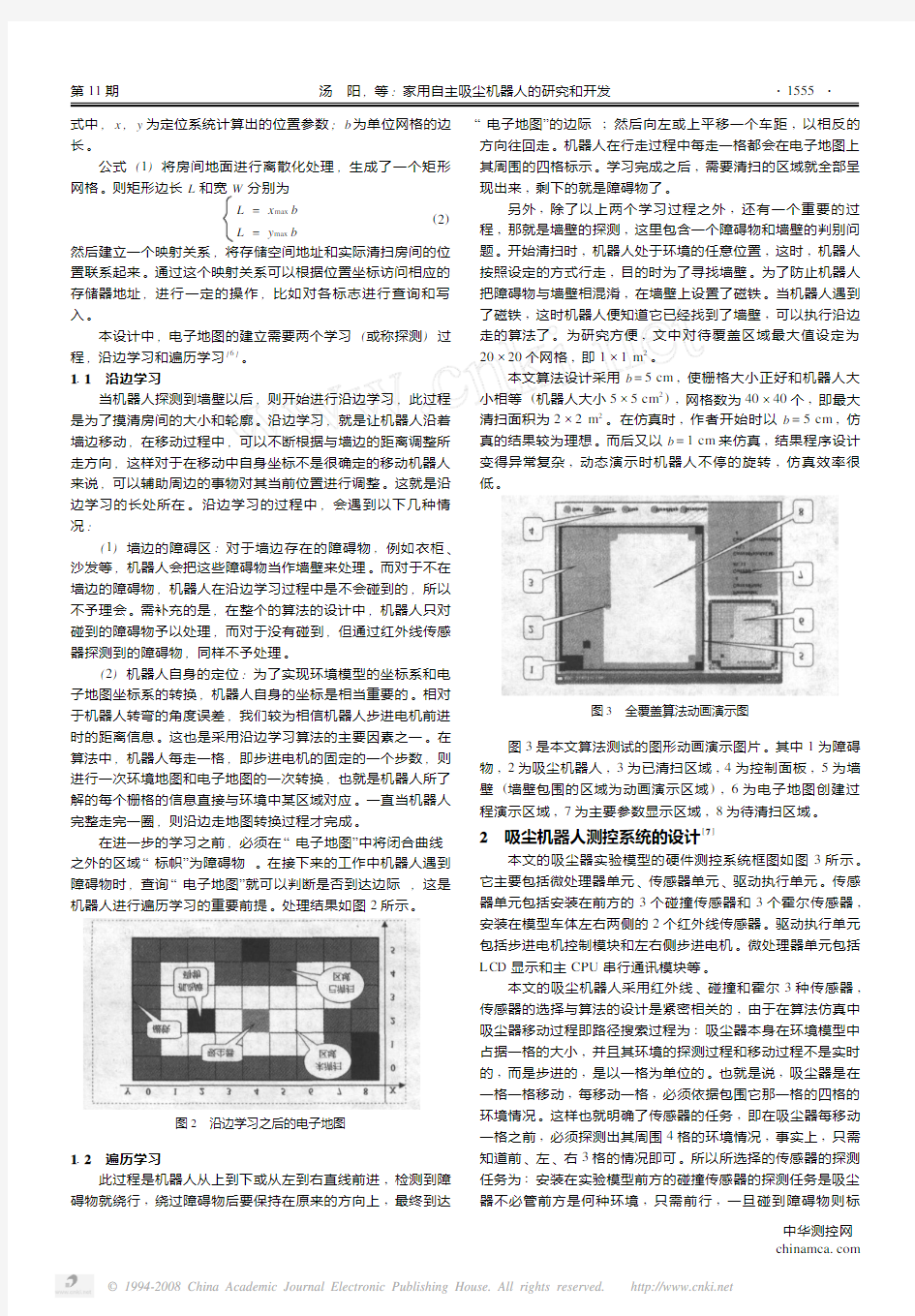
图3 全覆盖算法动画演示图
图3是本文算法测试的图形动画演示图片。其中1为障碍
物,2为吸尘机器人,3为已清扫区域,4为控制面板,5为墙壁(墙壁包围的区域为动画演示区域),6为电子地图创建过程演示区域,7为主要参数显示区域,8为待清扫区域。
2 吸尘机器人测控系统的设计[7]
本文的吸尘器实验模型的硬件测控系统框图如图3所示。它主要包括微处理器单元、传感器单元、驱动执行单元。传感器单元包括安装在前方的3个碰撞传感器和3个霍尔传感器,安装在模型车体左右两侧的2个红外线传感器。驱动执行单元包括步进电机控制模块和左右侧步进电机。微处理器单元包括
L CD 显示和主CPU 串行通讯模块等。
本文的吸尘机器人采用红外线、碰撞和霍尔3种传感器,传感器的选择与算法的设计是紧密相关的,由于在算法仿真中吸尘器移动过程即路径搜索过程为:吸尘器本身在环境模型中占据一格的大小,并且其环境的探测过程和移动过程不是实时的,而是步进的,是以一格为单位的。也就是说,吸尘器是在一格一格移动,每移动一格,必须依据包围它那一格的四格的
环境情况。这样也就明确了传感器的任务,即在吸尘器每移动一格之前,必须探测出其周围4格的环境情况,事实上,只需知道前、左、右3格的情况即可。所以所选择的传感器的探测任务为:安装在实验模型前方的碰撞传感器的探测任务是吸尘器不必管前方是何种环境,只需前行,一旦碰到障碍物则标
?1556? 计算机测量与控制 第14卷
中华测控网chinamca.
com
图3 吸尘器硬件控制体系框图
图。安装在吸尘器左右两边的红外线传感器所要完成的探测任
务是只需探测出吸尘器左右两边5cm 范围内是否有障碍物,有则标图。从而省却了吸尘器通过左拐、右拐来探测左右两边的环境情况,提高了路径搜索的效率。
本文在硬件设计中,为提高CPU 处理数据的效率,实验模型的控制主板采用双CPU 结构,分别称为主、从CPU 。从CPU 负责传感器数据的处理,并通过并口把数据传给主CPU ,主CPU 负责电机的控制和串口通讯。通过串口实现和PC 机的通讯。
3 算法在吸尘器上的应用
由前文可知,机器人环境探测仅在当前方向、左和右这3
个方向进行,一般情况下,机器人只需向前走,只有当前面碰到障碍物时,才考虑向左还是向右转弯,在左右两侧各安装一个红外线传感器对机器人左右两边的环境信息机器人每走一个网格就做一次记录。因此,实际上机器人需要完成的行为动作只有3个:前行5cm 即一格的距离,左转90°,右转90°。于是,上位机通过无线模块发送给机器人的指令也只有3种:00,01,10。分别代表执行机器人的3个行为动作。机器人每走一格则把前、左、右3格的信息通过无线模块发送给上位机,上位机根据算法需要把动作指令通过无线模块发送给机器人,如此反复,实现吸尘器的清扫任务。
4 结论与展望[8]
自主吸尘机器人的开发是一个循序渐进的过程,需要大量的时间和人力,不断进行试验和改进。下面提出了针对本文研究需要改进的方面,以及今后如何开展进一步研究给出了一些看法。
(1)自主吸尘器车体形状改成圆形,圆形能降低
吸尘器的避障转弯等运动的复杂性。
(2)在避障方面,增加超声波传感器,使它和红外线传感器相结合,实现简单避障功能到完全自主作业的智能完善。以提高机器人的路径搜索能力,提高吸尘器的工作效率。
(3)在行走驱动方面,用直流电机驱动代替步进电机驱动,实现机器人的平滑运动。
(4)在尽可能的情况下,增加吸尘机器人的人机
接口功能。
(5)实现上位机上的算法移植在吸尘机器人上,使机器人不必借助于无线模块,实现真正“脑体合一”,真正自主独立。
参考文献:
[1]Brian R.Robot s reach t he home floor [J ].Indust rial Robot ,
2001,28(1):27-28.
[2]刘 峰.服务机器人实用化关键技术的研究[D ].武汉:华中科
技大学,2001.
[3]刘 峰.服务机器人低成本及复杂度的研究[J ].机械传动,
2000,(3):24-26.
[4]朱世强,刘 瑜,庞作伟,等.自主吸尘机器人的研究现状[J ].
机器人,2004,(6):569-574.
[5]冯申坤.吸尘机器人非结构环境下自主路径规划方法的研究[D ].
杭州:浙江大学,2004.
[6]吴海彬,朱世强,马 翔.自主吸尘机器人在非结构环境下的避
障与路径规划研究[J ].机器人,2000,22(7):627-630.
[7]马 翔,朱世强,吴海彬.智能吸尘器的开发及设计[J ].电子
技术应用,2000,26(8):6-8.
[8]蒋新松.未来机器人技术发展方向的探讨[J ].机器人,1996,
18(5):285-291.
(上接第1553页)
因此吞吐量较低。在线程数变化时,NIXMalloc 的曲线比较平
直,变化比较稳定,消除了TCMalloc 在线程数变化时性能、内存使用量的抖动,这是自适应调优的良好表现。
6 总结
本文提出了NIXMalloc 分配技术的设计与实现,提供了G lobal 分配策略和Local 分配策略优化小对象内存块的分配。对G lobal 分配策略的线程缓存层实现了动态调整预取数量和线程缓存最大限值两种自适应调优方法,对Local 分配策略的中心缓存层实现了同步代价较低的低水线方法。通过这些优化,N IXMalloc 能对各种多线程应用程序提供较高吞吐量、较低内存使用量的内存分配和释放。对于网络服务器系统,N IXMalloc 分配器能在数据流量不断变化情况下根据各线程内存使用情况进行自适应调优得到最佳的时空效率。因此,本文所讨论的技术可应用在Internet 的多种应用上,具有广泛的研究和实用价值。
参考文献:
[1]Ghemawat S ,Menage P.
TCMalloc :t hread caching Malloc.
G oogle Performance Tools [EB/OL ].http ://goog https://www.doczj.com/doc/3215621834.html,/doc/tcmalloc.ht ml ,2004.
[2]G loger W.Dynamic memory allocator implementations in Linux
system libraries [EB/OL ].http ://www.dent.med.uni -muenchen.de/~wmglo/malloc -slides.ht ml.
[3]Sun Solaris [EB/OL ].http ://https://www.doczj.com/doc/3215621834.html,/app/docs.[4]Larson P A ,Krishnan M.Memory allocation for long -running
server applications [A ].Proceedings of t he First International Symposium on Memory Management [C ].ACM Press ,1998,pp.176-185.
[5]Kandiraju G B.Towards self -opt mizing memory management
[C].Pennsylvania State University ,2004.
扫地机器人的进化史 世界机器人大会,家用服务类机器人成为会上的热点,现在的家用服务机器人产业里,发展最为成熟的要数扫地机器人了。双十一生活类电器销售冠军已连续两年被扫地机器人占据,相信用不了太久,扫地机器人将成为下一个家用“必需品”。那么扫地机器人是怎么一步步发展成现在这个样子的呢?请跟ILIFE智意一起来看下: 前世——真空吸尘器 扫地机器人,又称机器人吸尘器,从名字就可以看出扫地机器人与吸尘器之间的渊源。真空吸尘器是由地毯清扫器发展而来的,第一台地毯清扫器出现在1860年代,而第一台现代真空吸尘器则出现在20世纪初。其主要部件是真空泵、集尘袋、软管及各种形状不同的管嘴,它有一个电动抽风机,通电后高速运转,使吸尘器内部形成瞬间真空,内部的气压大大低于外界的气压,在这个气压差的作用下,尘埃和脏物随着气流进入吸尘器桶体内,再经
过集尘袋的过滤,尘垢留在集尘袋,净化后的空气则经过电动机重新逸入室内,起到冷却电机、净化空气的作用。现代吸尘器在附件上变化多样,为清除地毯污物设计出了粗毛刷、细毛刷、转动毛刷,清理墙角用的是扁形管嘴、清理地析板用磨光刷等。虽然现代吸尘器在功能与清洁效率上与早期吸尘器相比有了巨大提升,但其原理基本保持没变,现在扫地机器人的清扫系统也基本沿用了这种结构。 诞生——“三叶虫” 真空吸尘器已经诞生了一个世纪之久,但是它的继承者扫地机器人却出现了不到20年。世界上第一台量产型扫地机器人的原型出现于1996年,叫做“三叶虫”(Trilobite)。到2001年,Trilobite才被推向市场,并成为史上第一款量产的扫地机器人。 发展——iRobot iRobot公司于2002年9月推出的Roomba是扫地机器人发展史上的里程碑式事件。由于其强劲的清扫能力和便宜的价格,Roomba一推出市场便获得了巨大的成功,原本预计生产10,000至15,000部,但发售后大受市场欢迎,单是圣诞期间已出售50,000部。 今生——智能加导航 巨大的市场发展空间,让很多公司看到了商机,众多企业纷纷进入扫地机器人市场,并推出了各种型号的扫地机器人。这一方面促进了扫地机器人数量上的增长,另一方面也促进了其质量上的提升。如今扫地机器人已逐步从原来的随机清扫发展到当前的路径规划式清扫中来,如果说原来的扫地机器人首要任务是功能实现的话,现在的主要任务已经变成质量和效率的提升了。现在比较有名的智能路径规划的扫地机器人主要有Neato、iRobot、ILIFE智意等。 ILIFE智意凭借超高性能和性价比迅速抢占市场空间,成为扫地机器人发展过程中不容忽视的新生力量。目前来看,扫地机器人仍然属于新兴行业,一些清扫问题还有较大的完善
移动机器人研究报告
目录 第一章行业发展概述 (4) 第一节移动机器人行业定义 (4) 一、移动机器人定义 (4) 二、移动机器人应用 (4) 第二节国内外发展概况 (4) 一、全球移动机器人行业发展历程 (4) 二、国内移动机器人行业发展历程 (5) 第二章产业链分析 (6) 第一节产业链结构 (6) 第二节行业上游运行分析 (6) 第三节行业中游运行分析 (7) 第四节行业下游运行分析 (8) 第三章应用市场分析 (9) 第一节汽车制造业 (10) 第二节电子行业 (11) 第三节烟草行业 (12) 第四节物流行业 (13) 第四章核心技术分析 (14) 第一节自主定位导航 (14) 第二节环境感知 (16) 第三节路径规划 (17) 第五章重点企业及产品分析 (19) 第一节新松机器人自动化股份有限公司 (19) 一、发展简况分析 (19) 二、产品结构特点 (20) 三、经营情况分析 (20) 四、综合实力评析 (20) 第二节华晓精密工业(苏州)有限公司 (21) 一、发展简况分析 (21) 二、产品结构特点 (21) 三、经营情况分析 (21) 四、综合实力评析 (21) 第三节云南昆船智能装备有限公司 (22) 一、发展简况分析 (22) 二、产品结构特点 (22) 三、经营情况分析 (22) 四、综合实力评析 (22) 第四节广州市井源机电设备有限公司 (22) 一、发展简况分析 (22) 二、产品结构特点 (22) 三、经营情况分析 (23)
四、综合实力评析 (23) 第五节广东嘉腾机器人自动化有限公司 (23) 一、发展简况分析 (23) 二、产品结构特点 (23) 三、经营情况分析 (24) 四、综合实力评析 (24) 第六章竞争格局分析 (24) 第一节国外竞争分析 (24) 第二节国内上游竞争分析 (25) 第三节国内中游竞争分析 (28) 第七章发展前景展望 (29) 第一节未来应用需求分析 (29) 第二节产品技术趋势分析 (29) 第三节产业面临的风险及规避 (30)
真空吸尘机器人的产品介绍译文 Highlights... Auto Cleans Auto Recharges Effective and powerful Intelligent Robot V acuum Cleaner Cleans both wooden and carpeted floors Excellent for busy people always on the go This clever futuristic robotic vacuum cleaner will automat ically clean your floors and recharge its power without you ever having to lift a finger. Just program it to sweep and vacuum your floors when you are away so you always come back to a clean home. The robot vacuum cleaner effectively picks up dirt, debris, pet hair and dust from carpets, wooden floors, marble floors and nylon flooring. The robot vacuum cleaner first sweeps up your floor with the installed counter rotating bristle brushes and beater brush that work together like a dust pan and broom. The sturdy bristle brush digs deep into the carpet fibers to drag dirt, debris, dust and much more out of those hard-to-reach areas. Then the powerful vacuum sucks all that accumulated nasty dirt into the bin leaving your floors and carpets extra clean. Are you always busy with work and never seem to have the time to vacuum your floors regularly? Then we have the solution for you. With this robot vacuum cleaner you can simply program it to clean at a desired time. This robot vacuum cleaner will not get stuck in corners or fall down the stairs. When faced with obstacles or a surface edge it will simply turn around and continue its primary directive, which is to clean. ◆优点: ?自动清洁 ?自动充电 ?效率高 ?智能机器人吸尘器 ?木质和铺有毛毯的地板均适用 ?为忙碌的人量身定做 ?这款超前的真空吸尘机器人不需要你动手就能自动帮你清洁地板并自 动充电。只要你在离家时给它设置好真空清扫计划,你回来时就是一 个干净的家了。 ?智能机器人吸尘器能有效地去除毛毯、木质地板、大理石地板、尼龙 复合地板上的污垢、残屑、毛发和尘埃。它的初步打扫是靠内部的逆 向旋转的毛刷和搅拌器刷的相互作用完成的,这两部分就类似于垃圾 铲和扫帚。其次,它再利用坚硬的毛刷深入到那些搅拌器刷难以触及 的地方对污垢、残屑和尘埃进行进一步的清理。最后,等强有力的真 空把所有的垃圾吸到垃圾箱后,你的地板和地毯就会格外的干净了。 ?你是否总是忙于工作而没有定期的时间清扫你的房子?让我们来为你 解决难题吧。有了这款真空吸尘机器人,你只要简单地给它设置好打 扫所需要的时间,它就能自动清扫了。它不会被困在角落或掉下楼梯,遇到障碍物或到达地板边缘时,它也会轻轻地避开并继续它的打扫。
保洁机器人吸尘器使用评测 家电智能化是目前的主流,也是以后家电发展的趋势。很多人都关注玛纽尔机器人吸尘器好不好用,因为玛纽尔的机器人吸尘器比一般的吸尘器的价格都要贵些。最怕就是花了钱,结果没什么用,这才是所有人关心的问题,今天跟大家分享一下保洁机器人吸尘器不好不好用的话题。 保洁机器人吸尘器之所以与其他普通吸尘器有区别的地方就是“机器人”这三个字。因为这个机器人吸尘器与传统吸尘器相比是非常智能的,一按开关按键就可以工作,甚至低电量时能够自己返回充电器进行充电。根本不需要人们亲自看护,使用者要做到的仅仅是隔一段时间清理下集尘盒就可以了。 下面,我们先看看玛纽尔机器人吸尘器的表现. 它采用了时尚的圆形外观,体积约是340(直径)*82(高)mm。体重达2.7kg。整机功率是28w,用标配的电池充电60分钟,可以大约工作一个小时,相当于充电一分钟,工作一分钟。而它工作的时候,声音约是68dB,对于吸尘器这样的产品来说,是一个可以接受的范围。它还搭载了红外感应系统,和碰撞式缓冲带。能够智能感应周围环境,在于家具发生碰撞时,缓冲带还能给予保护作用。在内部方面,它的“心脏“——就是它的电机,采用了BLDC无刷直流电机,区别于有刷直流电机,无刷直流电机不使用机械的电刷装置,性能上相较一般的传统直流电机有很大优势,功耗低,出力大,用它来做吸尘机器人的电机是非常合适的。
玛纽尔机器人吸尘器能够智能的判断地形和周围环境,如果某块地板特别脏的话,它还会对其“特别关注“,不断地在上面集中清扫直到干净为止。 使用非常简单,仅仅需要按动一下遥控器上的开关按钮,选择需要清扫的模式,它就能智能依照周围环境进行打扫了。它带有5种清扫模式可供选择:自动清扫模式,手动清扫模式,集中清扫模式,床底清扫模式还有边角清扫模式。而一般选用的就是自动清扫模式,他会先用集中清扫模式进行,然后经过一小段时间的感应障碍物的,或与障碍物发生冲撞后,就会结束集中清扫模式,对房间进行直线的来回打扫。因为这个模式是机器人自主控制的,如果它发现某地方的地形较高或者特别脏的时候,会间歇出现爬墙模式或者集中清扫模式。在这过程中,我们还发现一个比较有趣的功能,如果把清洁布安装在机器人上,它就会转换成请清洁布打扫模式,此时,它就不会往地毯,门槛之类的地方移动了。
自主机器人研究总结报告 一、课题研究背景和意义 工业机器人是最典型的机电一体化数字化装备,技术附加值很高,应用范围很广,作为先进制造业的支撑技术和信息化社会的新兴产业,将对未来生产和社会发展起着越来越重要的作用。在国际上,工业机器人技术日趋成熟,已经成为一种标准设备而得到工业界广泛应用,从而也形成了一批在国际上较有影响力的、着名的工业机器人公司,这些公司已经成为其所在地区的支柱性企业。在众多制造业领域中,应用工业机器人最广泛的领域是汽车及汽车零部件制造业。如在毛坯制造(冲压、压铸、锻造等)、机械加工、焊接、热处理、表面涂覆、上下料、装配、检测及仓库堆垛等作业中,机器人都已逐步取代了人工作业。 工业机器人在制造业的应用范围越来越广阔,其标准化、模块化、网络化和智能化的程度也越来越高,功能越来越强,并向着成套技术和装备的方向发展。工业机器人技术正在向智能机器和智能系统的方向发展,其发展趋势主要为:结构的模块化和可重构化;控制技术的开放化、PC化和网络化;伺服驱动技术的数字化和分散化;多传感器融合技术的实用化;工作环境设计的优化。在汽车领域,应用最广泛的是中载和重载机器人,因此开发具有较高负载能力的机器人意义更大。 二、课题研究的总体目标及完成情况
课题研究的总体目标、考核指标 2.1.1总体目标 开发出具有自主创新的点焊机器人及周边应用成套设备样机,解决机器人产业化过程中的机器人本体优化设计、基于网络的新型控制器技术、系统集成技术等关键技术问题,进行小批量生产,解决机器人产业制造中的加工工艺问题、制造精度问题和机器人整体制造成本降低问题,在此基础上进行产业化,并首先在奇瑞汽车生产线上进行示范应用,逐步形成中国的工业机器人品牌,促进我国新型工业机器人技术的应用和产业发展。同时制订和完善适合我国国情的安全规范和技术规范,在技术上创新,争取获得多项专利。 2.1.2 主要技术指标 其技术指标如下: (1)本体参数要求 在满足机械本体刚度、强度、转动惯量及一些其它技术参数的基础上选择结构简单、机身紧凑的机身设计,以满足轻量化、低成本及可维护性要求。具体参数范围要求如下:
机器人行业深度研究报告 【核心观点】 ●当前全球机器人市场主要以工业机器人为主,占市场份额的80%。未来服务机器人的行业规模或将超过工业机器人,成为新蓝海。 ●预计2014~2017年全球服务机器人市场规模累计将达2000亿元,复合增速将达到22%,中国市场增速远高于全球增速。以清洁机器人为例,“双十一”期间,国内扫地机器人公司科沃斯实现全网销售3.15亿元,其中在天猫商城销售达2.76亿元。这让我们看到了服务机器人在终端消费需求的爆发力。 ●中国的机器人密度仅为30,远低于世界平均水平的62,而世界最高的韩国达到437。工信部工业装备司副司长王卫明曾透露,国家的相关产业规划到2020年中国工业机器人的产业体系要具备3至5家具有国际竞争力的企业,8至10个产业配套集群,机器人密度达到100以上。从30到100对应的是3倍以上市场规模的增长。 ●机器人将迎来政策密集落地期,制造强国战略对机器人产业是长期利好。 ●机器人板块选股思路包括关键零部件国产化——$上海机电(SH600835)$$双环传动(SZ002472)$;工业机器人本体放量,尤其是经济型本体——$巨星科技(SZ002444)$;有技术含量的系统集成商——$机器人(SZ300024)$$埃斯顿(SZ002747)$;新兴的服务机器人——$博实股份(SZ002698)$$慈星股份(SZ300307)$。 【导读】 机器人的诞生或许并不是20世纪产业界最伟大的成就,但却可能是21世纪最伟大的变革! 机器人是集机械、电子、控制、计算机、传感器、人工智能等多学科先进技术于一体的现代制造业重要的自动化装备。自从1962年美国研制出世界上第一台机器人以来,机器人技术及其产品发展很快,已成为柔性制造系统(FMS)、自动化工厂(FA)、计算机集成制造系统(CIMS)的自动化工具。 广泛采用机器人,不仅可提高产品的质量与产量,而且对保障人身安全,改善劳动环境,减轻劳动强度,提高劳动生产率,节约原材料消耗以及降低生产成本,有着十分重要的意义。和计算机、网络技术一样,工业机器人的广泛应用正在日益改变着人类的生产和生活方式。 机器人能干的工作也已经从搬运、码垛、焊接等生产活动,到读报、陪护、弱交流等生活活动,再到排雷、战斗等军事活动,渗透到了人类的方方面面。随着需求范围的扩大,机器人结构和形态的发展呈现多样化。高端机器人具有明显的仿生和智能特征,其性能不断提高,功能不断扩展和完善,各种机器人系统逐步向具有更高智能方向演进。 目前机器人主要分为:工业机器人和服务机器人两大类。工业机器人细分为焊接机器人、搬
随着科技的发展,人们生活水平的提高,智能扫地机器人吸尘器成为了当代家庭中必备的小家电。也许您正享受着扫地机器人吸尘器带来的好处?也许您正准备为减省家务时间而购买智能扫地机器人吸尘器?纵观全球扫地机器人吸尘器市场,国外品牌扫地机器人一直占据着智能扫地机器人吸尘器市场70%以上份额,强大的品牌知名度,精致的做工,以及良好的售后服务都奠定了进口扫地机器人强大的市场份额。福布斯排行榜《扫地机器人品牌排行榜》出炉,识及选购技巧。 1、扫地机器人排名第一品牌:(TOMEFON德国)斐纳扫地机器人TOMEFON斐纳扫地机器人,著名的德国净化行业品牌。其持久耐用的品质,外观质朴典雅,有着精致合理的内部结构和无与伦比的清扫效果,并且价格相比其他国际品牌要适中很多,因此国际上具有极高的市场知名度与美誉度,被誉为“全球健康生活电器领军品牌”。TOMEFON斐纳扫地机器人具备了【扫、拖、吸、抛】四大基本功能外,还有红外感应,自动回充,阶梯回避,低噪音,非碰撞缓冲智能防撞,大垃圾清扫等其他13项智能机器人功能、风量强劲、密封性好、同时具有高效清扫效果的全能型特点。 2、扫地机器人排名第二品牌:(irobot美国)irobot扫地机器人irobot扫地机器人是美国一家多元化高科技制造企业,在扫地机器人行业仅次于TOMEFON斐纳扫地机器人吸尘器,拥有高科技的技术人才,知名MIT计算器科学与人工智能实验室技术转移及投资成立的机
器人产品与技术专业研发公司。iRobot发明各型军用、警用、救难、侦测机器人,轻巧实用,被军方、警方、救难单位用于各种不同场合。由于产品价格高,公司缓慢的市场推进进度,缺少好的品牌推广。使终端消费者没有深入的了解,制约了品牌发展。 3、扫地机器人排名第三品牌:(科沃斯中国)科沃斯扫地机器人 科沃斯扫地机器人在国产品牌里知名度还算可以的,因为价格较低,奠定了比较大的用户群体。外观独特,结构精巧,使用方便,给很多终端的消费者带来了实惠和便利。是中国扫地机器人品牌的一大亮点。由于价格低,功能简单,所以相比其他品牌清扫效果还是有差距的,大多机型没有真正的打扫功能,靠吸口吸扫,只适合灰尘毛发少的情况,像瓜子壳、烟头、纸巾等较大的垃圾很难处理掉,虽然代理商和经销商赚钱了,只是单一的依靠价格引领销量,不能彻底解决清扫中问题,还是有待加强。 4、扫地机器人排名第四品牌:(Proscenic台湾)浦桑尼克扫地机器人 浦桑尼克扫地机器人,“Proscenic”它是由prosperous 和scenic 组合而成象征着对未来智能化生活的美好憧憬.它是由台湾智能化工业协会创办,依托于台湾工研院的技术背景,从1996 年陆续投入智能扫地机行业的研发与生产,1998 年推出台湾第一款智能扫地机器人。
智能机器人行业研究报告
智能机器人行业研究报告 一、行业概况 1、行业监管体制、主要法律法规及政策 (1)行业监管 我国现行智能制造装备行业管理体制为国家宏观指导下的市场竞争体制,宏观调控归属于国家发改委、科技部、工信部以及商务部,主要通过研究制定产业政策、提出中长期产业发展导向和指导性意见等履行宏观调控和宏观管理的职能。 我国智能机器人行业自律组织系中国机器人产业联盟,侧重于行业内部自律性管理,中国机器人产业联盟是由中国机械工业联合会联合在中国注册的机器人行业骨干企事业单位、大专院校和科研院所共同发起成立,在发改委、工信部和科技部的指导下,贯彻落实政府部门对机器人行业提出的相关产业政策和要求;研究产业发展状况,为政府部门制定产业政策提供决策支持等。 目前,我国智能机器人行业无准入限制。 (2)行业主要法规与政策 2006年起,国家先后出台多项规范和扶持智能制造装备行业的规划和政策,采取有效的措施,大力支持工业智能机器人及自动化成套生产线行业的发展。 在“十二五”期间,工业智能机器人首次成为发展规划的重点发展对象之一,在国务院、工信部、科技部出台的关于“十二五”期间智能装备领域的发展规划中,均强调要重点开发并突破有关工业机器人及相关零部件等技术,明确了工业机器人及相关零部件的发展方向,上述政策的出台将有助于完善机器人产业链,促进产业快速发展,实现制造业的升级转型。 影响我国智能机器人行业发展的相关规划和政策具体情况如下: 时间部门政策法规相关内容 2006年02月国务 院 《国家中长期 科学和技术发 强调了要围绕国民 经济、社会发展需
展规划纲要(2006-2020 年)》求,以装备制造为突破口,以绿色制造为导向,以信息化和自动化技术为支撑,加强自主开发,支持企业提高自主创新能力,为建设创新型国家提供有力支撑。 2006年06月国务 院 《国务院关于 加快振兴装备 制造业的若干 意见》 提出为加快我国装 备制造业的振兴,国 家将采取以下政策 对装备制造业予以 扶持:①完善相关法 律法规和标准;②制 定重点领域装备技 术政策③调整进口 税收优惠政策;④鼓 励订购和使用国产 首台(套)重大技术 装备;⑤加大对重大 技术装备企业的资
服务机器人项目实施方案 投资分析/实施方案
服务机器人项目实施方案 服务机器人是机器人家族中的一个年轻成员,到目前为止尚没有一个严格的定义。不同国家对服务机器人的认识不同。可以分为专业领域服务机器人和个人/家庭服务机器人,服务机器人的应用范围很广,主要从事维护保养、修理、运输、清洗、保安、救援、监护等工作。 该服务机器人项目计划总投资16136.74万元,其中:固定资产投资11088.92万元,占项目总投资的68.72%;流动资金5047.82万元,占项目总投资的31.28%。 达产年营业收入38334.00万元,总成本费用29129.29万元,税金及附加329.11万元,利润总额9204.71万元,利税总额10803.44万元,税后净利润6903.53万元,达产年纳税总额3899.91万元;达产年投资利润率57.04%,投资利税率66.95%,投资回报率42.78%,全部投资回收期 3.84年,提供就业职位633个。 报告根据项目的经营特点,对项目进行定量的财务分析,测算项目投产期、达产年营业收入和综合总成本费用,计算项目财务效益指标,结合融资方案进行偿债能力分析,并开展项目不确定性分析等。 ......
服务机器人项目实施方案目录 第一章申报单位及项目概况 一、项目申报单位概况 二、项目概况 第二章发展规划、产业政策和行业准入分析 一、发展规划分析 二、产业政策分析 三、行业准入分析 第三章资源开发及综合利用分析 一、资源开发方案。 二、资源利用方案 三、资源节约措施 第四章节能方案分析 一、用能标准和节能规范。 二、能耗状况和能耗指标分析 三、节能措施和节能效果分析 第五章建设用地、征地拆迁及移民安置分析 一、项目选址及用地方案
2018年服务机器人行业市场调研分析报告 报告编号:OLX-WEI-018 完成日期:2018.9.04
目录 第一节服务机器人行业发展情况分析 (8) 一、服务机器人定义及分类 (8) 二、服务机器人发展驱动力分析 (8) 1、独居人口数量上升 (8) 2、人力成本不断提高 (9) 3、人均可支配收入提升 (10) 4、科技降低成本 (10) 5、政策、资本助力发展 (10) 三、全球服务机器人市场发展情况 (12) 1、全球服务机器人销售情况 (12) 2、全球服务机器人市场格局 (12) 3、全球家庭服务机器人销售情况 (13) 四、中国服务机器人市场发展情况 (14) 1、中国服务机器人销售情况 (14) 2、中国服务机器人市场格局 (15) 五、服务机器人细分产品分析 (15) 1、家务机器人 (15) 2、教育陪伴机器人 (16) 3、康复机器人 (17) 六、服务机器人行业招聘市场分析 (19) 1、服务机器人招聘职位分布 (19) 2、服务机器人专业开设高校及研究机构 (19) 第二节服务机器人行业产业链发展分析 (22) 一、中国服务机器人产业链图谱 (22) 二、服务机器人上游发展情况 (22) 三、服务机器人中游企业发展格局 (23)
1、新松机器人 (23) 2、哈工大机器人 (23) 3、科沃斯机器人 (24) 4、优必选科技 (24) 5、康力优蓝 (24) 6、克路德 (24) 7、云迹科技 (25) 四、服务机器人下游发展情况 (25) 五、服务机器人行业竞争格局 (27) 1、家务机器人 (27) 2、陪伴机器人 (27) 3、娱乐机器人 (27) 第三节服务机器人行业专利数据分析 (28) 一、全球企业持有服务机器人技术专利统计 (28) 二、亚洲大学及科研机构持有服务机器人技术专利统计 (28) 三、中国服务机器人专利电请数量和类型 (29) 四、中国服务机器人专利分布情况 (30) 五、中国服务机器人专利分布情况 (31) 六、服务机器人商标信息与软著权企业分布情况 (33) 第四节服务机器人行业投融资数据分析 (35) 一、服务机器人企业投融资情况 (35) 二、芯片融资情况和代表企业 (36) 三、操作系统融资情况和代表企业 (37) 四、语音识别融资情况和代表企业 (39) 五、图像识别融资情况和代表企业 (40) 六、激光雷达融资情况和代表企业 (42) 七、定位导航融资情况和代表企业 (43) 八、国内著名风险投资机构所投服务机器人相关企业展示 (44) 九、服务机器人融资市场总结 (45) 第五节服务机器人行业领先企业分析 (46)
智能清洁机器人的商业价值 一、智能吸尘机器人占据未来市场的可能性 作为清洁设备的一个做组成部分,智能吸尘机器人同样有着广阔的发展前景,随着人们日益提高的生活水平,人们对于享受生活的要求也就越来越高。家庭清洁-一项家庭日常必需做得工作,费时费力,很多人都希望可以简单而又轻松的完成这一项工作。故而,智能吸尘机器人有了其存在的市场价值。并且随着越来越多的人需要它,它的存在价值以及发展潜力也就越来越大了。 相比于普通的吸尘器,智能清洁机器人与其相比存在着很大的不同。智能吸尘机器人存在内置智能芯片,可以自动识别判断家庭环境,通过算法来计算行走路径,通过物理或者光学感应来检测家中灰尘的位置并能够自动清扫地板上的灰尘,清理毛发和碎物,并且在清扫任务完成后,智能吸尘机器人可以自动返回充电。而使得智能吸尘机器人可以做到这样的原因就是智能吸尘机器人内置的智能芯片以及提前下载拷贝到芯片中的程序。 在组成部分上,智能吸尘机器人与传统的吸尘器有着很大的不同:1、传感部分:相当于人的五官,起到对外界的感知作用。2、控制部分:相当于人的大脑,起到连接对肢体的支配。3、驱动部分:相当于人的肢体,被控制起到协调作业。4、吸尘部分:在智能吸尘器里面嵌入真空吸尘器部分。5、电源部分:提供机器所需要的动力系统。可以说,除了吸尘部分与传统的吸尘器有共同点之外,用户无法从智能吸尘机器人上找到一丁点吸尘器的影子,而这些正是在未来智能吸尘机器人可以取代吸尘器的原因。 在功能方面,智能吸尘机器人更加适合未来用户关于家庭清洁方面的要求,比如:1、智能清扫:仅仅只需要按下启动,无需人工辅助,智能吸尘机器人便可自动进行吸尘工作遥控清扫,用户可以通过红外线遥控感应器,随时遥控,随时清扫。2、超薄机身:可以直接切入家具底部进行清扫。在不工作时,可以放在任何地方,不占用太大的空间。3、自主导航:由于智能吸尘机器人的内置智能芯片以及算法的缘故,智能吸尘机器人可以采用不同的
摘要:根据人类快节奏生活环境的需要,在传统吸尘器的基础上运用了传感器技术,51单片机控制,全自动吸尘器将移动机器人技术和吸尘器技术有机地融合起来,实现室内环境的清洁,替代传统繁重的人工清洁工作,近年来已受到国内外的研究重视。 利用了超声波测距的原理,通过向前进方向发射超声波脉冲,并接收相应的返回声波脉冲,对墙壁等进行判断;通过以单片机为核心的控制器实现对超声发射和接收的选通控制,并在处理返回脉冲信号的基础上加以判断,选定相应的控制策略;通过驱动器驱动两步进电机,带动驱动轮,从而实现行走转向等功能;通过红外线热释电传感器对人的活动进行检测,减少人对吸尘器行走的影响。在吸尘器行走的同时,由其自身携带的吸尘风机,对经过的地面进行必要的吸尘清扫。当吸尘器电力不足时,电量传感器报警提示。 关键词:机器人吸尘器混合式步进电机超声波传感器灰尘传感器红外释热传感器电量传感器 一.整个控制系统的组成及主要设计思路分析 多功能吸尘器的整个控制系统,主要由电机部分、传感器部分、微型机算计部分(单片机8051)分组成。 该机器人吸尘器利用了超声波测距的原理,通过向前进方向发射超声波脉冲,并接收相应的返回声波脉冲,对障碍物进行判断;通过以单片机为核心的控制器实现对超声发射和接收的选通控制,并在处理返回脉冲信号的基础上加以判断,选定相应的控制策略;利用电子罗盘进行方向的判断,通过驱动器驱动两步进电机,带动驱动轮,从而实现避障。多功能吸尘器的红外线传感器能检测认得存在,在检测到人存在时会给单片机一个电信号,单片机控制吸尘器停止前进。多功能吸尘器实际上是一个行走机器人和吸尘器的组合体,吸尘器行走的同时,由其自身携带的小型吸尘部件,对经过的地面进行必要的吸尘清扫。 单片机作为控制源产生脉冲信号,驱动步进电机转动,同时检测超声波传感器与红外线传感器的信号,数字罗盘的转角信号同样也输出给单片机,由单片机完成信号的处理过程。 二.驱动电机部分 机器人吸尘器的驱动部分选择由两个四相步进电机以及相应的驱动机构组成。 1.选择步进电机的理由 步进电机的优势: 步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。
科技活动教课教案 项目:机器人主讲教师:** 授课时间:11月7日学时数:1学时 教学目标1.使学生初步了解机器人概念、特征; 2.使学生了解中鸣、乐高机器人工作原理。 教学重点机器人原理的介绍 教学步骤1.导入 机器人诞生、机器人的发展 2.概念讲解 智能机器人的构成 3.基本工具初识 马达、机械部件 组织形式小组为单位活动 教学内容机器人发展历史及简单结构拼装 1、机器人诞生 教师:用幻灯片展示自己的总结 中国的科学家们把机器人定义为“机器人是一种自动化的机器, 而且其具备一些人或生物相似的智能能力,如感知能力、规划 能力、动作能力、协同能力等,是一种具有高度灵活性的自动 化机器。” 2、机器人的发展 教师:用幻灯片展示自己的总结 第一代机器人属于示教再现型 第二代则具备了感觉能力 第三代机器人是智能机器人 3、智能机器人的构成 它不仅具有感觉能力,而且还具有独立判断和行动的能力,并 具有记忆、推理和决策的能力,因而能够完成更加复杂的动作。 中央电脑控制手臂和行走装置,使机器人的手完成作业,脚完 成移动,机器人能够用自然语言与人对话。 具有机械部件 (例如:木板、金属板、塑料板、有机玻璃板,还有螺丝、螺帽等各种五金紧固件。) 具有感应和动作电子部件 (光源传感器、声音传感器、气体传感器、温度传感器等。) 具有机器人的大脑(RCU) 具有机器人的思想(编程实现) 教师:对学生的回答进行补充。 学生活动: 熟悉乐高机器人的零件结构,拼插简单的机器人 积木块垂直结构的搭建,马达能量分为1——5级,按照马达的功率,
进行速度的调整。 本课小结通过本节课的学习,学生对智能机器人有一定的了解。
智能机器人行业研究报告 一、行业概况 1、行业监管体制、主要法律法规及政策 (1)行业监管 我国现行智能制造装备行业管理体制为国家宏观指导下的市场竞争体制,宏观调控归属于国家发改委、科技部、工信部以及商务部,主要通过研究制定产业政策、提出中长期产业发展导向和指导性意见等履行宏观调控和宏观管理的职能。 我国智能机器人行业自律组织系中国机器人产业联盟,侧重于行业内部自律性管理,中国机器人产业联盟是由中国机械工业联合会联合在中国注册的机器人行业骨干企事业单位、大专院校和科研院所共同发起成立,在发改委、工信部和科技部的指导下,贯彻落实政府部门对机器人行业提出的相关产业政策和要求;研究产业发展状况,为政府部门制定产业政策提供决策支持等。 目前,我国智能机器人行业无准入限制。 (2)行业主要法规与政策 2006年起,国家先后出台多项规范和扶持智能制造装备行业的规划和政策,采取有效的措施,大力支持工业智能机器人及自动化成套生产线行业的发展。 在“十二五”期间,工业智能机器人首次成为发展规划的重点发展对象之一,在国务院、工信部、科技部出台的关于“十二五”期间智能装备领域的发展规划中,均强调要重点开发并突破有关工业机器人及相关零部件等技术,明确了工业机器人及相关零部件的发展方向,上述政策的出台将有助于完善机器人产业链,促进产业快速发展,实现制造业的升级转型。 影响我国智能机器人行业发展的相关规划和政策具体情况如下:
3、行业发展历程 1920年,捷克作家K.凯比克在科幻剧本《罗萨姆的万能机器人》中首次提出了ROBOT这个名词。现在已被人们作为机器人的专用名词。 (1)第一代机器人 20世纪50、60年代,随着机构理论和伺服理论的发展,机器人进入了使用化阶段。1954年美国的G.C.Devol发表了“通用机器人”专利;1960年美国AMF 公司生产了柱坐标Versatran机器人,可做点位和轨迹控制,是世界上第一种用于工业生产上的机器人。 20世纪70年代,随着计算机技术、现代控制技术、传感技术和人工智能技术的发展,机器人行业得到了迅速发展。1974年美国俄亥俄州辛辛那提的Milacron公司成功开发了多关节机器人;1979年,Unimation公司推出了PUMA 机器人,它是一种多关节、全电动驱动、多CPU二级控制的机器人,采用了V AL 专用语言,可搭配视觉、触觉、力感等传感器,在当时是一种技术先进的工业机器人,现在的这hi能机器人结构大体上是以此为基础的。 这一时期的机器人属于“示教再现”(Tech-in/Playback)型机器人,只具有
目前国外主流产品为Neato和iRobot,同时也是口碑最好的2个牌子,一般也都在这2个牌子中选择。要知道这两家都是专注于机器人吸尘器方面的专业公司绝非国内山寨品可比。 4 |4 f$ t# @1 p) X/ q; W: m! c: Y 知识普及 Neato 采用激光扫描技术的规划式机器人吸尘器,好比有一双眼睛,会实时绘制屋内地图。 型号( V! n- E8 w5 d7 s0 V t; g XV11 XV12 XV21 11是Neato最早面世的型号,初期的机器会有一些问题。% t2 v3 V$ }% y 12针对11暴露出的问题作了改良,颜色也有不同。0 m* |6 U" p* T8 b' { 21对于11和12除了颜色不同外,对底部刷子与内部滤网做了改变,定位PET宠物型,提升清理宠物毛发能力。 / x. \. X% d' L' \ X, J7 z 5 b) |4 C# o0 |7 u' J8 K2 w ; w, |. B% I* c% k6 _: M* Q 规格 体积:34x32x10.2cm 工作时间:60-90分钟 充电时间:约3小时
噪音:约70分贝 ) ~% ~5 K7 A+ q4 h4 ] 打扫方式& n3 n0 B( @- h5 U Z 涡轮式离心马达提供大吸力,前部滚刷扫入大颗粒垃圾,边扫边吸。! t; _+ W) X; u : _+ D3 Z; E8 G / j8 _0 }& a2 _. M 2 w ?" M; B: u/ {: ?" y/ W 引用一张非常直观的Neato行动曝光图
1 _. u w5 x+ {3 H# v iRobot% d+ {9 ^( D- m% `( v$ I2 a 感应碰触式,依靠人工智能iAdapt技术,通过前部一圈感应器外加保护杠的触碰来得到周围情况反馈,每秒60次以上的思考、计算、判断,并做出40种以上的不同智能反应,好比像昆虫的灵敏触觉。6 `7 P, o+ V% @% h 打扫方式 专利3段式打扫,边刷,底刷,尘盒吸尘4 b, p5 s8 i' k v 5 ?- T0 j0 S3 E' ?% ]& q % {) _- | o( E. v2 K" U3 |
毕业设计(论文)中文题目:清扫机器人结构设计 学习中心(函授站):江阴 专业:机械设计及自动化 姓名:夏成 学号:CS051410248 指导教师:孙菊 南京航空航天大学 2016年5月 目录 中文摘要......................................................... I ABSTRACT ........................................................ II
第一章绪论 (1) 第一节研究的目的和意义 (1) 第二节设计的重点和难点 (1) 第三节家庭清扫机器人的关键技术 (1) 第四节论文主要完成工作 (2) 第二章总体结构设计 (3) 第一节整体结构布局 (3) 第二节驱动部分 (4) 第三节吸尘部分 (6) 第四节电源部分 (6) 第五节路径规划算法 (6) 第六节仿真结果 (8) 第三章硬件控制部分设计 (9) 第一节 AT89系列单片机简介 (9) 第二节外围电路 (9) 结论 (11) 致谢 (12) 参考文献 (13) 题目:清扫机器人结构设计
中文摘要 摘要:清扫机器人属于服务机器人的一种,世界各国尤其是西方发达国家都在致力于研究开发和广泛使用服务机器人。如果清扫机器人的性价比足够高,那么清扫机器人的市场将会被看好。 本文介绍了清洁机器人在国内外发展现状和应用情况,侧重研究了清洁机器人的避障控制系统。结合实验室实际条件,设计了机器人样机。其主要工作内容包括:小车机械本体设计、控制理论的介绍、AT89C51单片机控制系统硬件电路及检测电路设计、控制系统软件设计和机器人避障性能测试试验。 通过实验表明所设计的机器人样机能够实现自主避碰的功能,达到设计要求。 关键词:清洁机器人避障 AT89C51单片机
iRobot机器人吸尘器 一,简介 iRobot机器人吸尘器是美国iRobot公司的家用机器人事业部的明星产品,到2011年其全球销售量超过100万台每年,创造了有史以来机器人销售神话。 美国iRobot公司是世界机器人行业的领军者,创始人是美国麻省理工学院(MIT)罗迪·布鲁克斯教授(Rondy Brooks)和他的两个得意门生柯林安格尔(Colin Angle)和海伦格莱纳(Helen Greiner)。iRobot机器人吸尘器的巨大成功奠定了iRobot公司家用机器人世界领导者的地位。 二,发展历程 2002年全球第一款家用清洁机器人iRobot Roomba 正式上市。这个荣获多奖的机器人吸尘器改变了人们清扫地板的方式。 2004年iRobot 推出了iRobot Roomba Discovery 系列,有污垢探测和自动充电的功能。 2005年iRobot 发布了世界上第一台清洗地板的机器人Scooba,能清洗硬地板,瓷砖,油布地板等。同年iRobot于纳斯达克挂牌上市,上市代码为IRBT。 2007年iRobot 发布了Roomba 500 系列。
2008年iRobot 发布了宠物系列和专业系列的机器人吸尘器。 2011年iRobot在CES上展出了最新700系列的Roomba。 三,产品型号 从2002年到现在,Roomba一共发布了供7个系列的产品,它在中国的版本为53708和56708。 四,工作原理 1,iRobot专利技术iAdapt(TM) Roomba 使用先进的iAdapt(TM)技术,这是一个由软件和感应器组成的专利系统。iAdapt(TM) 让Roomba 可以主动对清扫环境进行监测,每秒钟思考次数超过60 次,并且能够以40 种不同的动作进行反应,以便彻底清扫房间。 1、能满足最根本的清洁要求 2、能适应不同的家具摆设格局 3、能探测到污垢并且反复进行局部清理 4、清洁沙发底部、床底等人工不便打扫的区域 5、能有效清洁角落、墙边和家具边缘 6、防缠绕功能可轻松摆脱电线、流苏等障碍物, 2,三段式清扫技术(TM)
智能全自动吸尘器的功能及工作原理 1.路径规划 功能介绍:自动实现科学合理的行走路线,彻底清扫家庭卫生,没有遗漏区域。 功能原理:通过电脑芯片控制机器人的左右轮转速,实现圆弧形清洁路线。当圆弧的半径拓展到7.5m的时候,芯片程序会控制机器人离开当前路线,在7.5m远处再次执行圆弧清洁路线。大量的圆弧对地面实行无缝覆盖,从而达到全面清洁地面的目的。 2.自动充电 功能介绍:自动打扫完一圈后回到充电座上面自动充电,方便下一次使用 功能原理:在机器人电量快要耗完时,机器人顶部的红外线发射头发射出无电信号,当充电基座上的两个红外线接收头接收到此信号时,机器人便与充电基座取得了联系后。通过两个红外线接收头对机器人的引导,使其慢慢靠拢,最终实现对接。 有些朋友不太清楚应该怎样选购吸尘器,您可以参考《什么样的智能吸尘器好,应该怎样选购?》一文,传送门:https://www.doczj.com/doc/3215621834.html,/archives/132.html 3.防跌落 功能介绍:例如在桌面上清扫的时候,走到桌沿后会自动感应到,然后倒退或者转向继续行走。 功能原理:在机器人底部前段,安装了4对红外线感应头,每一对感应头包含一个发射头和一个接收头。红外线发射头发射的红外经地面发射后,被对应的接收头所接收。如果机器人底部距离地面的高度超过5mm,电脑芯片便会控制机器人,使其退回或者转向。 4.超薄机身设计 超薄的机身一般只有8cm~10cm,可轻松的清扫平时我们难以接触的地方如沙发底部和床底。并且相对应的是,在床底和沙发底清扫时,使用‘阴暗区清扫’功能,可让机器人彻底清扫完后才出来,更智能更快捷。 5.自动倒垃圾 一般的机器人吸尘器灰尘盒容量不够,会造成多次手动倒垃圾的情况。睿洁机器人拥有0.8 L 灰尘盒,如果家中不是长期没有清洁,一般每次清洁只需更换一次灰尘盒。0.8 L超大容量灰尘盒, 采用的是磷酸铁锂环保电池电池,每次充电时间只需1小时,并可连续使用1小时。 本文转载自:贺紫菲博客更多家用吸尘器智能吸尘器相关知识您还可以访问https://www.doczj.com/doc/3215621834.html,
工业机器人行业研究报告 文/李楠 前言: 2008年金融危机以来,全球兴起再工业化浪潮,国内重型机械、冶金机械、船舶制造、压力容器、机车车辆、汽车等行业已进入世界同行业先进行列,推动了高效节能智能焊接自动化机器人装备的强势增长。随着软件及系统建设的完备、自由研发水平的提升,未来工业制造领域的发展将持续刺激焊接工业机器人的需求。本文试图从行业概况、行业规模、市场容量、监管动向和行业风险等角度剖析中国工业机器人行业发展趋势。 一、行业概况 根据工信部数据统计,截止2015年全球工业机器人销量已超过24.8万台,预计2018年销量将达到40万台;中国工业机器人销量已超过2.22万台,预计2018年销量将达到10万台。 表:全球及中国机器人销量(万台) 数据来源:工信部,IFR,财富证券 2016年4月,三部委联合发布机器人“十三五”规划,提出未来五年,自主品牌工业机器人年产量达到10万台,中国涉及工业机器人的自动化焊接行业
市场处于启动期,已经进入加速临界点,随着软件及系统建设的完备、自由研发水平的提升,未来工业制造领域的发展将持续刺激焊接工业机器人的需求。 二、行业规模与行业价值链的构成及上下游关系 (1)行业规模 根据前瞻产业研究院发布的《2015-2020年中国工业机器人行业产销需求预测与转型升级分析报告》显示,我国是工业机器人消费大国,从2013年起就连续两年成为全球第一大工业机器人消费市场。CRIA数据显示,2013年是我国工业机器人发展元年,国内工业机器人销量为3.69万台;2014年我国工业机器人销量达5.7万台;2015年国工业机器人销量达7.5万台。当前,国内机器人产业聚集在中低端,高端机器人及核心零部件主要依赖进口。 图:2010-2015年中国工业机器人销量(万台)与增长率 数据来源:CRIA 国联证券研究所 结合行业专家分析,预计中国机器人市场容量将在2020年达到1200亿元,未来10-20年均增长率为20%-30%。 图:2013-2020年中国工业机器人市场容量(亿元)