无人机系统路线图
(2005-2030)
美国国防部部长办公室
二OO五年八月八日
(北京高博特广告有限公司组织翻译)
编译说明
2005年8月,美国国防部在其网站发布了其2000年以
来的第三版,也是最新版有关无人机发展的指导性文献《无
人机系统路线图2005-2030》。该文献比较详细、全面地阐述
了美国各种用途的无人机研制、作战使用情况,说明了美国
对无人机的未来需求、技术实现途径、未来的发展规划和设
想。
该文献英文版正文77页,11个附件,共约230页。为
及时了解、掌握国外无人机发展情况,推动我国无人机事业
发展,为“尖兵之翼—2006中国无人机大会”提供有价值的
参考资料,“尖兵之翼—2006中国无人机大会”组委会委托
北京高博特广告有限公司组织军队和地方有关专业人员对
该文献进行了翻译。由于时间紧张只翻译了正文和前3个附
录。考虑到资料的完整性,现将英文版全部附上,供大家参
考。翻译中的不足之处敬请读者批评指正。有关进一步需求
可与北京高博特广告有限公司直接联系。
“尖兵之翼—2006中国无人机大会”组委会 二OO六年九月十六日
联系人:孙柏山 电话:88587506-816
国防部部长办公室
华盛顿特区20301
2005年8月4日本文件作为一个备忘录,分送给各军事部门领导,包括:空军参谋长、陆军参谋长、海军陆战队司令、海军作战部长、国防预研局局长、国家地面与空间情报局局长。
主题:无人机系统路线图,2005-2030
我们批准发布这个版本无人机系统路线图是因为:无人机系统自2001年秋季参与反恐战争以来,在军事作战中的使用迅速扩展。无人机系统采用新战术、新技术、新方法改变了当前的作战空间,实现了对伊拉克和阿富汗进行的打击支援。无人机系统不仅可提供持久的情报、监视和侦察能力,还可提供精确和及时的直接火力和间接火力。作战指挥官需要更多的无人机系统。我们面临的挑战是快速协调地整合这一技术以支援联合作战。
该路线图的中心目标是指导国防部推动无人机系统任务能力向最紧迫的作战需求实现合理的转移。
签名人:
史蒂夫·卡姆勃恩肯耐斯·克瑞格
(国防部副部长,主管情报)(国防部副部长,主管采办、技术和后勤)皮特·佩斯林顿·威尔斯二世
(陆战队将军,国防部副部长,参联会副主席)(国防部长执行助理,负责网络和信息集成)
执行摘要
当全球反恐战争进入第四个年头,无论是在出动架次、飞行时间、还是在任务扩展方面,无人机1的作用都在不断扩大。到2004年月,联军的20多种无人机,不管是大型的还是小型的,在支援持久自由行动(OEF)和伊拉克自由行动(OIF)中的总飞行时间已经超过10万个飞行小时。执行的任务不仅仅是侦察,还涉及到对地攻击、部队防护、以及信号收集等,从而有助于降低“行动情报”的传感器探测-武器发射链的复杂度和时间上的延迟。无人机系统(UAS)不断扩展,包含了相当广泛的任务能力范围。这些各式各样的系统在成本上,从几千美元到几千万美元不等;在能力上,既有重量不足1磅的微型飞行器,也有重量超过4万磅的大型飞机。无人机和一般意义上的无人系统正在通过无情追击恐怖分子而不造成巨大经济损失和人员伤亡来改变全球反恐战争(GWOT)的军事作战方式。
在未来25年(2005-2030)内,国防部将开发和使用一系列越来越尖端的无人系统(包括无人机),而技术专家、采办官员、以及作战计划指定人员也需要一个清晰、协调的计划来实现能力的发展和转变。该路线图的中心目标符合《战略规划指导方针》,并指导各军事部门和防御机构推动无人机系统的任务能力逻辑地、系统地向一种新门类的军事工具转移。该路线图旨在提出各种紧迫的任务需求,而这些任务在技术方面和作战方面通过不同的无人机系统都可以实现。其中有些任务,只要采用当前的技术发展水平就能完成,一方面国防
1在提及无人机系统飞行组件时,该路线图采用无人机这一术语,而不是无人飞行器。无人机系统是该路线图的重点。术语上的改变可以更清楚地强调飞机只是系统的一个组件,同时也是为了符合联邦航空管理局的决定,即出于管理的目的,将“UA V”归为一类飞机。
部现有资源和近期将具备的资源足以支持这些任务的实现,另一方面对于国防部各成员单位来说,其风险程度相对较低。而其他一些方面的任务迫切需要无人机增添新的能力,而且对于机组人员来说也是高风险的。该路线图强调实现后一类任务。这也是国防部近期工作的重点所在。
各军种正在广泛地开发无人机系统能力,而国防部办公室(OSD)负责确保这些能力能够支持国防部的更大能力目标,如战场转型能力、建立联合作战标准的能力、以及控制成本的能力等。国防部办公室正在建立以下的目标以实现关键的无人机系统能力。括号内列出了需要合作才能实现前述目标的组织机构。
1.用于飞机控制和传感数据分布的战场保密通用数据链通信系统具有防窃听、防干扰、防人为干扰、以及防拦截等改进功能,适用于所有的战术和大型无人机。系统可用时,应与联合战术无线电系统(JTRS)/软件通信系统架构(SCA)相兼容。(国防部办公室、美国陆军、美国空军、美国海军、美国海军陆战队)。
2.对能够在高危险环境下执行防空压制(SEAD)/对地攻击/电子攻
击/情报、监视和侦察任务的联合无人作战飞机系统进行开发和作战评估。(国防部办公室、美国空军、美国海军)。
3.确保所有具有全运动视频能力的无人机符合现有的国防部/情报团体的运动图像标准委员会的元数据标准和配置文件标准。作战演示和提取战场近实时(<3分钟)的无人机系统元数据用于寻找武器的瞄准。(国防部办公室、美国空军、美国陆军、美国海军、美国海军陆战队)。
4.开发能够确保无人机安全、及时、定期地进出管制和非管制空域的政策、标准、和程序,具体如下:
z促进用于无人机系统设计、制造、测试和使用的全行业适航标准的开发、采用、和实施(国防部办公厅)。
z协调有关在非受限空域使用国防部无人机和相应有人机的有关联邦航空管理局(FAA)条例(例如:飞机、轻型运动飞机、和
无线电控制航模)(国防部办公厅)。
z开发无人机的“看见”和自主躲避其他飞机的能力,提供与有人系统相当的安全水平(美国空军、美国陆军、美国海军、美国海
军陆战队)。
5.开发和界定替代用于无人机的汽油内燃机的可靠推进系统方案,尤其是用重油发动机来替换。(国防部办公室、美国空军、美国陆军、美国海军、美国海军陆战队)。
6.通过改善联合军种协同能力来改进作战指挥官无人机系统的效能。
(国防部办公室、联合部队司令部、美国空军、美国陆军、美国海
军、美国海军陆战队)。
7.确保对无人机机载武器绝对控制的标准化和保护。开发适用于所有适当无人机的标准的无人机系统体系架构,包括武器接口。
(国防部办公室、美国空军、美国陆军、美国海军、美国海军陆战队)。
8.改进无人机的抗恶劣天气的能力,以提高其任务可用度和任务效能。(国防部办公室、美国空军、美国陆军、美国海军、美国海军陆战队)。
9.通过一套更弹性的测试和后勤支援过程来保障已验证的作战能力能够快速地整合到已部署的系统中。(国防部办公室、联合部队司令部、美国陆军、美国陆军、美国海军、海军陆战队)。
目录
1.概述 (13)
1.1目的 (13)
1.2范围 (14)
1.3定义.................................................................. l4 1.4发展无人机的原因 (15)
2.目前的无人机系统 (17)
2.1大型无人机系统 (18)
2.1.1 MQ-1“捕食者”(Predator) (18)
2.1.2 RQ-2B“先锋”(Pioneer) (20)
2.1.3 RQ-4“全球鹰”(Global Hawk)........................ (21)
2.1.4 RQ-5A/MQ-5B“猎人”(Hunter) (23)
2.1.5 RQ-7A/B“影子”200(Shadow 200) (24)
2.1.6 RQ-8A/B“火线哨兵”(Fire Scout) (24)
2.1.7 MQ-9“捕食者”B(Predator B) (27)
2.1.8联合无人空战系统(J-UCAS) (29)
2.1.9未来战斗系统(FCS) (31)
2.1.10 “小昆虫”增程型(I-Gnat-ER) (32)
2.1.11“全球鹰”海上演示型(GHMD) (33)
2.1.12“广域海上监视”(BAMS)无人机 (34)
2.1.13“增程/多用途”(ER/MP)无人机 (35)
2.2概念探索无人机系统 (36)
2.2.1 X-50“蜻蜒”鸭式旋翼/机翼(CRW)飞行器 (36)
2.2.2 A-160“蜂雀”(Hummingbird) (37)
2.2.3“鸬鹚”(Cormorant) (39)
2.2.4 DP-5X (40)
2.2.5“长枪”(Long Gun) (41)
2.2.6无人战斗武装旋翼机(UCAR) (43)
2.2.7“鹰眼”(Eagle Eye) (44)
2.3特种作战无人机系统 (46)
2.3.1海王星(Neptune) (46)
2.3.2“无洛印小牛”(Maverick) (46)
2.3.3 XPV-1“燕鸥”(Tem) (48)
2.3.4 XPV-2“灰鲭鲨”(Mako) (49)
2.3.5 CQ-10“雪雁”(Snow Goose) (51)
2.3.6“缟玛瑙”(Onyx)自主制导翼伞 (53)
2.4小型无人机系统 (54)
2.4.1迷你型无人机 (54)
2.4.2微型无人机(MA V) (62)
2.4.3“有机飞行器”-II(OA V-II) (64)
2.5 无人飞艇 (65)
2.5.1先进飞艇飞行实验室 (66)
2.5.2系留式浮空器雷达系统(TARS) (67)
2.5.3联合对地攻击空中组网传感器(JLENS) (68)
2.5.4快速初始部署浮空器(RAID) (69)
2.5.5快速升空浮空器平台(REAP) (70)
2.5.6高空飞艇(HAA) (72)
2.5.7近空间机动飞行(NSMV)/攀登者/V-飞艇 (73)
2.5.8海军空中中继系统(MARTS) (74)
2.6无人飞行系统项目数据 (75)
2.7世界无人机系统发展 (77)
2.7.1国外无人机系统发展 (78)
2.7.2出口政策 (80)
3.需求 (81)
3.1无人机的作用经过历史的检验 (82)
3.2作战司令部对无人机的需求 (83)
3.3无人机的任务要求分级 (85)
3.4向无人机开放的任务领域 (86)
3.5互操作性 (87)
4.技术 (89)
4.1处理器技术 (91)
4.2通信技术 (93)
4.2.1数据链 (94)
4.2.2以网络为中心的通信系统 (95)
4.3.1平台技术 (97)
.
4.3.2控制 (98)
4.3.3推进 (99)
4.3.4可靠性 (102)
4.3.5生存力 (103)
4.3.6系统成本控制 (105)
4.4有效载荷技术 (106)
4.4.1传感器 (107)
4.4.2通信中继 (110)
4.4.3武器 (112)
4.4.4有效载荷的成本控制 (113)
5.作战 (113)
5.1培训 (113)
5.2作战方案制定一参与部门 (116)
5.3作战 (121)
5.4武器投放................................................... (125)
5.5使用和支持费用 (127)
6.路线图............................................................ (128)
6.1无人机系统能力路线图 (129)
6.2无人机系统任务路线图 (131)
6.3无人航空的目标 (135)
6.4未来方向 (137)
附录A…………………………………………………………
附录B
附录C
1.概述
1.1目的
该路线图旨在推动美军2005年至2030年间无人机开发计划的制定。它将协助美国国防部决策者们在未来四年防务评审(QDR)和其他计划制定工作中规划无人机开发与采办的长期战略。同时,它还将指导工业界进行无人机相关技术的开发工作。此外,这份文件还可以帮助美国政府的其他机构充分利用国防部的无人机技术投资来满足他们的需求与能力。该路线图提出以下几个关键问题:
?无人机系统能够承担什么样的军事能力需求?
?提供这些能力所需什么样的处理器、通信、平台和传感器技术??这些技术何时能实现上述能力?
该路线图将配合美国军方为应对2l世纪紧急事件而正在进行的重新确定其作用与任务的工作。美军将无人机系统看作是未来战术组成中不可缺少的部分。例如,美国陆军目前进行的转型创新工作计划将为每个旅战斗队建立一支配备无人机系统的侦察、监视和目标获取(RSTA)中队,重点在于降低重量、提高灵活性以及将自动化装置整合
到未来部队中。
1.2 范围
该文件既不授权发展某种无人机系统(UAS),也不确定优先需求,因为这方面的职责由各军种和联合需求监督委员会(JROC)担负。作为其担负的国防采办和技术发展监督职责的一部分,国防部部长办公室(OSD)希望该路线图能够在诸如标准开发等横向项目领域和其他互操作解决方案中起到显著的指导作用,所以它所要完成的是确定技术何时能够产生新的能力,何时能够与作战人员的需求相关联以及何时整合到现有或计划中的无人机系统中。这份文件所讨论的许多技术目前正在国防研究实验室和承包商的工厂中不断成熟。路线图选择的25年时间跨度与新一代飞机和有效载荷技术从实验室计划成为可部署的系统所花费的时间相当。本研究提供的信息截止于2005年3月30日。项目信息截止时间为2006财年预算被提交到议会的2005年2月7日。
1.3 定义
由于都是无人控制的,巡航导弹武器有时被混淆为无人机武器系统。二者关键的区别是:(1)无人机在飞行结束后可以进行回收,而巡航导弹则不能回收;(2)无人机携带的弹药无须进行特殊制造并不与机身形成一体,而巡航导弹的弹头则被整合在弹体内。这个区别在2002年1月美国联合出版社出版的《国防部词典》有关无人机的解释中有清晰的阐述。
“无人机是指不搭载操作人员的一种动力空中飞行器,采用空气
动力为飞行器提供所需的升力,能够自动飞行或进行远程引导;既能是一次性使用也能进行回收;能够携带致命性或非致命性有效负载。弹道或半弹道飞行器、巡航导弹和炮弹不能看作是无人空中飞行器。”
1.4 为什么发展无人机
通常认为,人在执行某些空中任务时存在局限,无人机比有人机更加适合执行枯燥无味、有放射性侵害和危险的任务。尽管任何飞行都可能是枯燥或危险的,但由于受到传统方式的影响或是由于技术上的不成熟,人们仍旧继续执行这些飞行任务。以下事例将证明这种说法。
枯燥无味的任务
在1999年科索沃战争爆发期间,B-2飞机机组人员在34田里执行了从密苏里州到塞尔维亚的历时34小时的往返飞行任务。机组人员从通常的2名扩充到3名,即便这样,繁重的管理仍旧是部队指挥官考虑最多的问题。他们估计40小时将是机组人员执行任务的极限时间。蓝德公司在科索沃战争结束后进行的评估中指出,每架飞机的机组人员应从2名增加到4名或实施国外部署。然而,该建议存在一个明显的制约因素,因为成倍增加机组人员要么将使利用美国空军有限的B-2飞机进行的训练架次和飞行时间增加一倍,要么降低每名B-2机组人员的训练架次和飞行时间,但这样会使得他们的作战熟练程度和技能下降到无法接受的程度。与之形成对照的是,近两年里美国本土人员操作MQ-1无人机在阿富汗和伊拉克进行了近乎连续几天的作战任务,操作人员每4个小时轮换一次,承受压力的时间较短。
有放射性侵害的任务
美国空军和海军从1946年到1948年间分别采用无人驾驶的B-17和F6F在核武器爆炸后的几分钟内飞入到蘑菇云中采集放射样本,这显然是一项有放射性侵害的任务。返回的无人机采用水管进行清洗,采集到的样本由类似樱桃采摘器一样的机械手获取,以尽可能减少地面人员对放射物的接触。1948年,美国空军认定机组人员所面临的放射物污染风险是可以控制的,无人驾驶飞机的样本采集任务由身穿60磅重铅服的飞行员驾驶的F-84飞机取代。这些飞行员的一部分由于坠机后受到铅服的束缚或受长期射线的辐射而相继死亡。核武器辐射性微尘的有人采集任务持续到上世纪90年代。
危险的任务
侦察历来都是一项危险的任务。二战期间,第三侦察大队25%的飞行员牺牲在北非战场,而飞跃德国领空的轰炸机飞行员死亡比率仅仅为5%。当1960年5月1日前苏联击落一架美国U-2侦察机并逮捕其飞行员后,对前苏联进行的有人侦察飞行被终止了。5月1日可以承受的风险到5月2日则被认为在政治和军事上是不可接受的。尽管这架U-2及其飞行员(弗朗西斯·加里·鲍威尔)既不是第一个也不是最后一个在冷战时期被击落的侦察飞机和飞行员(冷战时期的侦察任务共损失了23架有人驾驶飞机和179名飞行员),但这些损失促进了空军为执行侦察任务开发无人机的工作,特别是AQM-34“火蜂”和洛克希德D-21无人机。从1965年到1971年在中国损失的7架无人机却几乎被忽略了。三十年后,美国海军一架EP-3飞机被损毁以
及24名机组人员遭到扣留的时间表明,和平时期的侦查任务仍旧具有危险性和政治敏感性。无人机系统能够提供显著帮助的其他危险任务还包括对敌防空压制(SEAD)、攻击和电子战。越南战争和巴以冲突中执行上述任务的飞机和机组人员的损失最大。部署无人机的一个主要目的是降低高危险环境内机组人员丧命的风险。将这些任务部署给无人战斗机(UCA V)将直接解决攻击或削弱敌方一体化防空系统能力所存在的危险问题。
使无人机在以上三个方面比有人飞机更具优势的特性包括:在克服枯燥方面,机器比人具有更长时间的灵敏性;对于应付放射性侵害和危险方面,如果任务失败,采用无人机的政治和人员风险更低,任务的成功几率更高。更低的负面风险和更高的任务成功率是继续扩展无人机系统的两大推动力。
2.当前的无人机系统
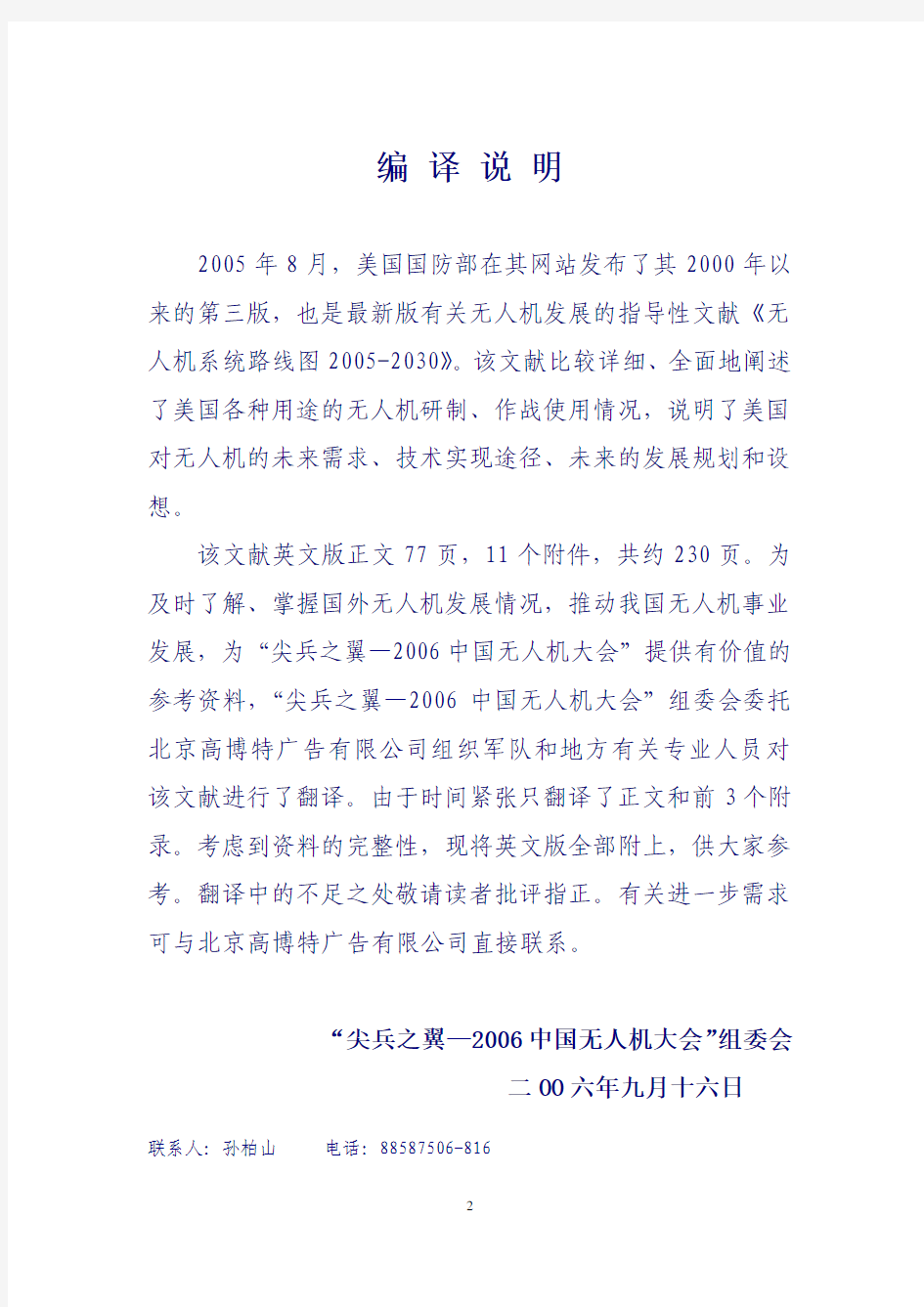
本节为该路线图的用户提供了美国国防部当前和已规划的无人机系统计划的简要描述。它将国防部的无人机系统分类为大型无人机系统、概念探索无人机系统(用于开发新的技术或作战概念)、特种作战无人机系统(只装备特种作战司令部)、小型无人机系统(可由l-2人操作的迷你型或微型无人机系统)、以及无人飞艇(包括浮空器和软式飞艇)。特定系统的细节描述可从其简介下方所列的网站链接中获得。
图 2.0-1 国防部当前和已规划的无人机系统项目时间图2.0-1提供了美军正在进行和已规划的战术无人机系统、长航时无人机系统及战斗无人机系统项目的综合时间表。每个项目条中的垂线代表该项目实际或预定形成初始作战能力(IOC)的时间。该图是图6.2-1所示的、完整的未来25年无人机系统路线图的关键组成部分。
2.1 大型无人机系统
2.1.1 MQ-1“捕食者”(Predator)
装备军种:空军
制造商:通用原子航空系统公司
机器人发展史的30个里程碑 1. 漏壶,公元前1400 年 巴比伦人发明了漏壶,这是一种利用水流计量时间的计时器,它也被认为是历史上最早的机械设备之一。在后来的好几百年,发明家们不断对漏壶设计进行改进。在公元前270 年左右,古希腊发明家特西比乌斯(Csestibus)发明了一种采用活灵活现的人物造型指针指示时间的水钟,他也因此成名。 2. 亚里士多德,公元前322 年 古希腊哲学家亚里士多德曾想象过机器人的功用,他写道:“如果每一件工具被安排好甚或是自然而然地做那些适合于它们的工作……那么就没必要再有师徒或主奴了。” 3. 达·芬奇的骑士,1495 年 莱昂纳多·达·芬奇(Leonardo DaVinci)设计了一种发条骑士,试图让它能够坐直身子、挥动手臂以及移动头部和下巴。这个机器人是否曾被造出来并不能确定,但根据其设计或许能够造出第一个人形机器人。 4. 沃康松的鸭子,1737 年 法国发明家雅克·沃康松(Jacques Vaucanson)制造了一只发条鸭子,它可以扇动翅膀、发出嘎嘎叫声,以及摄入和消化食物。 5. 土耳其机器人,1769 年 匈牙利作家兼发明家沃尔夫冈·冯·肯佩伦(Wolfgang von Kempelen)建造了土耳其机器人(The Turk),它由一个枫木箱子跟箱子后面伸出来的人形傀儡组成,傀儡穿着宽大的外衣,并戴着穆斯林的头巾。这台装置诞生后一度名声大噪,因为它被视为能够跟国际象棋高手对弈的机器人,但最终谜底揭开,机器人之所以会下棋是因为箱子里藏着一个人。 6. 雅卡尔提花织机,1801 年 法国丝绸织工兼发明家约瑟夫·雅卡尔(Joseph Jacquard)发明了一种可以通过穿孔卡片控制的自动织机。在十年之内,这种织机被大规模生产出来,整个欧洲有数千台投入使用。 7. 梦想变成真正男孩的木偶,1881 年 意大利作家卡洛·洛伦齐尼(Carlo Lorenzini)写出了《匹诺曹》(Pinnochio),讲述了一个提线木偶变成真正男孩的故事。随着机器人技术的发展,关于机器人获得生命的文学主题将繁荣兴旺。 8. 超越自身时代的特斯拉,1898 年
2013年3月20日 美国机器人发展路线图 ——从网络到机器人
目录 概述 (9) 领域具体结论 (11) 制造业 (11) 医疗机器人 (11) 健康陪护 (11) 服务应用 (12) 空间应用 (12) 国防应用 (12) 更多资料 (13) 制造业中机器人发展路线图 (15) 概要 (15) 1引言 (16) 2机器人制造业的战略重要性 (17) 2.1经济推动力 (17) 2.2经济增长领域 (18) 2.3机器人“消费化” (19) 2.4制造业展望 (20) 3研究路线图 (21)
3.1流程 (21) 3.2机器人和制造业概述 (22) 3.3制造业的关键能力. (24) 4研究与开发:有前途的方向 (30) 4.1学习和适应 (30) 4.2建模、分析、仿真和控制 (31) 4.3标准化方法 (31) 4.4控制和规划 (31) 4.5感知 (32) 4.6新机构和高执行效力驱动器 (32) 4.7人机交互 (32) 4.8架构和展示 (33) 4.9测量学 (33) 4.10制造中的云机器人和自动化 (34) 5参考文献 (36) 6参与者 (37) 医疗保健和医疗机器人技术路线图 (38) 动机与范围 (38) 参与者 (38) 研讨会成果发现 (38) 1引言 (39)
1.1领域定义 (39) 1.2社会动因 (40) 2战略发现 (42) 2.1外科手术和介入机器人 (42) 2.2机器人取代了减少的或丧失的功能 (43) 2.3机器人辅助康复与复健 (44) 2.4行为治疗 (45) 2.5特殊需要人群的个性化护理 (46) 2.6健康促进 (47) 3主要的挑战和功能 (48) 3.1范例场景 (48) 3.2功能路线图 (50) 3.3部署问题 (66) 4基本研究/技术 (67) 4.1体系构架和表达 (67) 4.2形式化方法 (68) 4.3控制和规划 (68) 4.4感知理解 (69) 4.5鲁棒性和高保真的传感器 (69) 4.6新型机构和高性能执行器 (70) 4.7学习和自适应 (71)
无人机飞行路线控制系统设计 由于无人机是通过无线遥控的方式完成自动飞行和执行各种任务,具有安全零伤亡、低能耗、重复利用率高、控制方便等优点,因此得到了各个国家、各行各业的高度重视和广泛应用。尤其以美国为代表,无论是在军事、民用、环境保护还是科学研究中,都将无人机的使用发挥到淋漓尽致,其拥有全球最先进的“捕食者”和“全球鹰”战斗无人机、监测鸟类的“大乌鸦”无人机、民用用途的“伊哈纳”无人机等等。我国在无人机研制方面也取得了一定的成就,拥有技术卓越的“翔龙”和“暗箭”高空高速无人侦查机、多用途的“黔中”无人机、探测海洋的“天骄”无人机、中继通讯的“蜜蜂”无人机等等。在未来,随着现代化工业技术、信息技术、自动化技术、航天技术等高新技术的迅速发展,无人机技术将日趋成熟,性能日益完善,为此将拥有更为广阔的应用前景。为确保无人机能够有效地完成各种飞行任务,研发者开发了各种技术方式的飞行控制系统,完成对无人机的起飞、飞行控制、着陆以及相应目标任务等操作的控制。飞行路线控制是飞行控制系统中最基础也是最核心的功能控制部分,其它所有的飞行任务控制都是飞行路线控制的基础之上实现。目前对于无人机飞行路线的控制已有各种各样方式的系统,但大多数系统都存在一定缺陷,如有些系统操作过于繁杂,不够智能化;有些系统只能在视距范围遥 控无人机,严重限制了无人机的使用;有些系统过于专用化,不能适用于大多数类型的无人机;有些比较完善的系统,造价又过于昂贵,等等一系列问题。针对以上存在的这些问题,本课题提出了一种成本低、
遥控距离远、智能化、高效化、适用性广的无人机飞行路线控制系统设计方案。该系统方案包括两大部分,一部分是操作人员所处的地面监控系统,一部分是无人机端的受控系统,实现的机制主要是无人机不断地将自身的定位信息实时地传送给地面控制系统,地面控制系统将无人机位置信息通过电子地图可视化显示给操作人员,操作人员结合本次飞行任务,采用灵活的鼠标绘制方式在地图上绘制预定的飞行路线,地面控制系统对绘制路线进行自动处理生成可用的路线控制信息帧并发送给无人机受控系统,无人机受控系统接收到位置控制信息帧,不断结合实时的方位信息得到飞行控制信息,从而遥控无人机按照预定路线飞行。此外,为方便用户以后对历史数据的查看,以分析总结得到一些有价值的信息,地面监控系统还包含了对预定路线和无人机历史飞行路线的存储、查询和在地图中回放功能。基于GIS技术的地面监控系统的具体实现是在Windows操作系统上,采用Visual Basic作为系统开发环境并结合MSComm串口通信技术、Mapx二次开发组件技术、Winsock网络接口技术以及Access数据库技术完成软件设计,实现与无人机受控系统的无线通信、GIS系统操作和监控、历史数据存储和重现等,其中实验区域的电子地图采用Mapinfo Professional开发软件绘制完成,并创新性地设计并绘制了画面简洁的带高层信息的二点三维矢量地图,而对于绘制路线的优化和提取处理采用了垂距比值法和最小R值法。无人机端使用BDS-2/GPS双卫星系统对无人机实时位置进行高精度的定位,采用双串口单片机进行运算控制处理,实时的飞行控制信息采用了几何空间算法得到,另外采
美国空军乃至全世界最先进的无人机 ——全球鹰无人侦察机 全球鹰无人侦察机 诺斯罗普·格鲁曼公司的rq-4a“全球鹰”是美国空军乃至全世界最先进的无人机。作为“高空持久性先进概念技术验证”(actd)计划的一部分,包括“全球鹰”和“暗星”两个部分在内的“全球鹰”计划于1995年启动。1999年6月到2000年6月是“全球鹰”在美军组织下的部署和评估阶段。根据经费的情况,各种需求按优先顺序的在各个批次中得到满足。到第二个生产循环,即“全球鹰”block 10批次,美军在作战能力评估中正式确定“全球鹰”具有了完整的作战能力。 长13.4m,翼展35.5m,最大起飞重量11610kg,最大载油量6577kg,有效载荷900kg。一台涡扇发动机置于机身上方,最大飞行速度740km/h,巡航速度635km/h,航程26000km,续航时间42h。可从美国本土起飞到达全球任何地点进行侦察,或者在距基地5500km的目标上空连续侦察监视24h,然后返回基地。机上载有合成孔径雷达、电视摄像机、红外探测器三种侦察设备,以及防御性电子对抗装备和数字通信设备。合成孔径雷达的探测距离范围为20~200km,能在一天当中监视1.374×105km2的面积,图像分辨率为0.9m,可区分小汽车和卡车;或者对1900个2km×2km的可疑地区进行仔细观察,图像分辨率为0.3m,能区分静止目标和活动目标。电视摄像机用于对目标拍照,图像分辨率接近照相底片的水平。红外探测器可发现伪装目标,分辨出活动目标和静止目标。侦察设备所获得的目标图像通过卫星通信或微波接力通信,以50Mb/s的速率实时传输到地面站,经过信息处理,把情报发送给战区或战场指挥中心,为指挥官进行决策或战场毁伤评估提供情报。 “全球鹰”于1998年2月首飞,在actd计划执行期内完成了58个起降,共719.4小时飞行。1999年3月第二号原型机坠毁,携带的专门为“全球鹰”设计的侦察传感器系统毁坏;1999年12月,三号机在跑道滑跑时出现事故,毁坏了另外一个传感器系统。因此在之后的试飞中,没有加装电子/红外传感器系统。
基于无人机的线路巡查系统设计 发表时间:2018-12-05T21:47:00.547Z 来源:《电力设备》2018年第22期作者:段李飞蒋钰何强宋治王治军宋强 [导读] 摘要:人类为了应对越来越紧迫的能源危机和环境危机,正在大力发展光伏发电等清洁能源。 (国网长治供电公司山西长治 046000) 摘要:人类为了应对越来越紧迫的能源危机和环境危机,正在大力发展光伏发电等清洁能源。2017年,我国光伏发电新增装机高达53.06GW,其中,分布式光伏新增装机达到20GW,占全部新增装机的接近40%,分布式光伏电站的运维也面临日益严峻的挑战。 关键词:无人机;新能源;分布式光伏;红外成像检测 1前言 四旋翼无人机成本低,轻便灵活,可搭载丰富的设备,因此许多大型光伏电站正逐步将其应用到光伏巡检中。在实际应用中发现,仅考虑到达目标点的轨迹规划方案因为没有考虑到四旋翼无人机的运动学特性,会造成区域漏检,影响最终检测结果的可靠性。此外,由于旋翼无人机续航能力的限制,巡检过程中的飞行路径规划也会直接影响到任务的执行效率。 2光伏产业简介及问题描述 2.1光伏巡检环境 在大型光伏电站中,由于北半球的日照来自偏南侧,光伏组件通常以光伏组串的形式放置,组串大体上是东西走向,南北相邻的光伏组串之间有一定的间隔,保证每个组件尽可能接受到辐照能量。由于光伏组串间外观都十分相近,光伏场区内的地理环境也大都较为重复,难以找出典型且通用的特征以支持对不同的地理区域进行区分。巡检的目标是以尽可能高的效率对整片光伏场区进行覆盖式的图像采集、分析并定位故障,在线路径规划在此场景下并不适用,因此对本例来说,需通过提前获得相对精确的光伏组件安装信息(如建站施工时的CAD图纸、高精度的GPS信息等等)采取离线路径规划的方式。针对该次飞行任务,设定无人机巡检高度为100m。在一次巡检中,令无人机沿着光伏组串的排列方向进行匀速飞行,无人机机身搭载的三轴云台相机视角朝向正下方并定点连续拍照,这种设计减轻了后期处理中的故障组件定位难度。当无人机完成对一列光伏组串的巡检并要进行下一列的巡检时,需要进行转弯机动,在旧方案里采用的是先减速定点再进行转弯的直线飞行模式,但是在实践中发现,某些情况下云台角度会与预期产生偏差,导致拍摄的图像不准确,影响后期的检测处理。 2.2飞行约束条件 无人机机身上搭载的相机自带一体式的三轴增稳云台,可以支持在大动作飞行的情况下依然保持视频拍摄平稳。在无人机的巡检过程中,云台相机的俯仰角被设定在-90°,亦即视角竖直向下。由于三轴云台具有自稳特性,机身在一定范围内的倾斜会让电机作出相应调整,而不会改变相机的对地位姿,保持视频画面平稳。当机身的俯仰角大于0°时,云台为保持画面平稳,会将俯仰角朝向∠C方向调整,即[-120°,-90°]范围内;若机身的俯仰角大于30°,则将超出云台相机的机械调节范围,在角度过大期间,将无法拍摄到预期图像;当机身俯仰角由大于30°减小到30°以下时,云台相机的俯仰角也不会回正,而是会由于传感器的偏差等原因,落在∠B范围内,即俯仰角处于[-90°,0°]的区间内,且误差会随着多次的俯仰角超出调整范围而产生叠加效应。此时只能通过手动调整云台角度,该过程涉及到人工操作,且动作滞后。这就导致了机身每发生一次大幅度的角度变化都会导致错误的发生。 3无人机在分布式光伏电站的应用分析 (1)分布式光伏电站采用人工巡检需要花费大量的时间和精力,费时费力,效率低下,难度大,成本高,风险突出。随着经济的发展和科技的进步,无人机技术快速发展,应用越来越广泛。无人机在航拍、农林植保、地质勘探、电力巡检等行业都有大量应用。 (2)在电力行业,无人机主要应用于架空输电线路巡检,为此国家电网发布了《架空输电线路无人机巡检系统配置导则》、中电联发布了《架空输电线路无人机巡检作业技术导则》。随着发展,行业内已经认识到无人机的优势,并编制了《光伏电站用无人机系统检测技术规范》,对无人机巡检系统及光电吊舱进行规范指引。 (3)光伏电站是无人机在电力系统应用的典型案例,无人机可以利用自身优势,快速对分布式光伏电站屋顶进行巡检,有效解决人员攀爬屋顶等困难,大大提高巡检效率,同时也规避了因人员攀爬工业钢构架屋顶产生的人员坠落及雷击等安全风险。 (4)由于分布式光伏,集电线路沿墙壁外延引出,巡查难度相对较大,房屋用户基本为工业企业,生产活动难免会对线路及组件产生影响。搭载高清摄像头的无人机对集电线路、光伏组件、屋顶状况等方面开展巡检,可以有效发现存在问题,能够及时解决隐患,即降低项目损失。 (5)除了实现日常巡检外,无人机搭配具有红外成像的光电吊舱还能实现光伏组件红外巡检,有效发现组串中损坏的发热组件。组件损坏或局部遮挡后将会产生热斑效应,由发电单元变为损耗单元,不但损坏组件寿命,并且影响整体组串的发电量。定期开展红外检测工作,将大大提高因组件损坏造成组串出力不高而损失的电量,尤其是分布式光伏位于工业园区,人为或其他原因造成的组件损坏率高,且遮挡问题较为严重。 (6)利用无人机巡检光伏电站,不仅降低了组件损坏的发现难度,在节省人工提升效率方面更具有先天的技术优势,将成为分布式光伏电站运维难点解决的关键助手。目前行业内已经开始逐步推广应用,无人机具备设置巡航路线,自动拍摄的功能,极大的方便了巡视数据的获取和后期数据分析。同时无人机的GPS导航功能也可以快速的定位巡视中存在缺陷的组件,便于维护人员及时赶赴现场处理。 4无人机的线路巡查系统设计 利用智能化的无人机巡检系统,可以自动开展巡检工作,巡检系统一般包括无人机系统、数据采集系统、地面智能控制系统和数据分析处理系统等4部分。 4.1无人机系统 无人机系统一般配置较长时间续航能力,同时具备一定的防护能力,多为工业级多旋翼无人机,并配置最新的飞行控制器,采用多传感器融合算法,以便控制能够精准可靠;能实时查看相机画面,传输距离远达5km;内部控制能够实时监控剩余电池电量,系统会自动分析计算出返航和降落所需的电量和时间,避免因电量不足引发的危险。同时可实现20min快速充电功能,能在短时间内将电池充满。 4.2数据采集系统数据 采集系统一般包含成像系统,能够识别组件遮挡物、灰尘遮盖状况,同时拥有红外成像系统,可采集热斑情况。图像数据一般实时传
美国医疗与保健机器人技术路线图(上) 计划,其中医疗保障机器人发展规划作为其重要的一部分。了解美国医疗与保障机器人技术发展方向,有利于我国在相关领域的迅速发展。 如今,医疗机器人已经在包括前列腺手术及心脏手术等外科手术领域获得了巨大的成功。同时,机器人还被用于外伤康复与智能义肢来帮助人们重获丧失的身体机能。远程医疗与辅助机器人医疗技术的出现让为某些难以进入的特殊区域提供医疗保障成为可能,如缺乏专业人员的偏远地区、灾害区域以及战区。社会辅助机器人正在向可负担的诊所和入户诊疗技术发展,它们在疾病预防、康复以及促进重新融入社会的认知以及身体体征监测、辅导以及激励实践中都发挥作用。随着人口老龄化趋势越来越明显,机器人技术还朝着促进原居安老(例如在家里)、推迟老年痴呆症的发生,通过陪护缓解老年人孤独的方向上进一步发展。此外,机器人传感以及活动建模方法可能在改善早期筛查、持续评估和个性化、有效的、可负担的干预及治疗中起到关键作用。上述所有的机器人发展方向,都会在维持及提高劳动生产率、增加劳动力数量以及逐渐增加残疾人重返工作岗位等方面发挥作用。今天,美国在特殊人群和老年人生活质量维持方面所需的机器人辅助手术与社会辅助机器人技术具有领先地位,但其他国家已经认识到此类技术的需求和前景,开始在相关领域迅速发展。 为了能全面评估机器人技术在医疗与保健领域的应用潜力,由外科手术机器人、修复、移植和康复机器人领域的专家及行业代表参与的研讨会于2012年下半年在美国召开。所有的与会者都从专业角度出发,贡献了自己的意见与见解,并在许多共同利益和挑战上达成了共识,最终完成了路线图修订。 机器人系统在医学与健康领域的应用
无人机系统路线图 (2005-2030) 美国国防部部长办公室 二OO五年八月八日 (北京高博特广告有限公司组织翻译)
编译说明 2005年8月,美国国防部在其网站发布了其2000年以 来的第三版,也是最新版有关无人机发展的指导性文献《无 人机系统路线图2005-2030》。该文献比较详细、全面地阐述 了美国各种用途的无人机研制、作战使用情况,说明了美国 对无人机的未来需求、技术实现途径、未来的发展规划和设 想。 该文献英文版正文77页,11个附件,共约230页。为 及时了解、掌握国外无人机发展情况,推动我国无人机事业 发展,为“尖兵之翼—2006中国无人机大会”提供有价值的 参考资料,“尖兵之翼—2006中国无人机大会”组委会委托 北京高博特广告有限公司组织军队和地方有关专业人员对 该文献进行了翻译。由于时间紧张只翻译了正文和前3个附 录。考虑到资料的完整性,现将英文版全部附上,供大家参 考。翻译中的不足之处敬请读者批评指正。有关进一步需求 可与北京高博特广告有限公司直接联系。 “尖兵之翼—2006中国无人机大会”组委会 二OO六年九月十六日 联系人:孙柏山 电话:88587506-816
国防部部长办公室 华盛顿特区20301 2005年8月4日本文件作为一个备忘录,分送给各军事部门领导,包括:空军参谋长、陆军参谋长、海军陆战队司令、海军作战部长、国防预研局局长、国家地面与空间情报局局长。 主题:无人机系统路线图,2005-2030 我们批准发布这个版本无人机系统路线图是因为:无人机系统自2001年秋季参与反恐战争以来,在军事作战中的使用迅速扩展。无人机系统采用新战术、新技术、新方法改变了当前的作战空间,实现了对伊拉克和阿富汗进行的打击支援。无人机系统不仅可提供持久的情报、监视和侦察能力,还可提供精确和及时的直接火力和间接火力。作战指挥官需要更多的无人机系统。我们面临的挑战是快速协调地整合这一技术以支援联合作战。 该路线图的中心目标是指导国防部推动无人机系统任务能力向最紧迫的作战需求实现合理的转移。 签名人: 史蒂夫·卡姆勃恩肯耐斯·克瑞格 (国防部副部长,主管情报)(国防部副部长,主管采办、技术和后勤)皮特·佩斯林顿·威尔斯二世 (陆战队将军,国防部副部长,参联会副主席)(国防部长执行助理,负责网络和信息集成)
史上最全美军现役无人机资料 作为现代战争中的新生力量,无人机已经成为世界各国的研究热点。各军事强国都在不断挖掘无人机作战应用的新概念、新方法和新领域。其中,美国是当今世界上无人机系统数量最多、技术最发达的国家,无人机的作战使用经验也最丰富。尤其在进入21世纪之后,美国先后发布了5版关于无人机的发展路线图,紧跟作战需求的变化和技术的发展,不断修正军用无人机的发展方向。在美军发布的“2009-2034财年综合无人机系统路线图”中,美国又推出联合能力范围(JCA)的新概念,力图使其无人机的发展研制更贴近未来的作战需求。自2001年以来,美军已在战场上装备了“猎手”、“大乌鸦”、“影子”、“全球鹰”、“捕食者”等各型无人机系统,主要被用于伊拉克和阿富汗战场。仅在伊拉克,美国就投入使用了361架无人机。美军对于无人机的需求正大幅增加,其执行飞行时间已超过50万小时。这些无人机主要是用于监测、追踪,但现在美军发展的趋势是将无人机越来越多的参与到攻击地面目标(图1)的作战行动中,基本可以做到发现即摧毁。图1 无人机攻击界面随着作战任务的多样化,未来美军将列装更多型号及用途的无人机,本文主要罗列到目前为止美军列装的主要无人机装备及参数。图2 MQ-1“捕食者”(Predator)MQ-1“捕食者”(Predator):
空军 总重:1020Kg 有效载荷:200Kg 续航时间:>24h/16h (带外挂) 最大/巡航速度:220/130Km/h 升限:7600m 发动机: Rotax 914F 功率:115马力 传感器:光电/红外、雷神AN/AAS-52、合成孔径雷达、诺斯罗普?格鲁门、AN/ZPQ-1 武器:2 枚AGM-114图3 RQ-4“全球鹰”(Global Hawk)RQ-4“全球鹰”(Global Hawk):空军 总重:12000Kg 有效载荷:890Kg 续航时间:32h 最大/巡航速度:650/630Km/h 升限:19000m 发动机: AE-3007E 推力:7600 磅力(劳斯莱斯) 传感器:光电/红外、合成孔径雷达/移动目标图4 MQ-9“死神”(“捕食者”-B)MQ-9“死神”(“捕食者”B ):空军
前言 2001年10月,54架“猎人”和“影子”攻击型无人机投入作战运用。由此,美国陆军的整场军事行动拉开帷幕。今天,美国陆军装备的无人机已经超过了4000架,它们型号各异,功能不同,而且还在进一步列装之中。近9年连绵不断的战火中,在支援部队作战的行动中,无人机系统作战运用的方式不断适应形势,发生着显著变化。这种适应,不仅表现在当前无人机部队作战平台的剧增,而且也表现在无人机系统能力的不断扩展。值此联合能力集成开发系统(JCIDS)文件对需求已经予以认可,官方计划业已立项之际,为未来的无人机系统需求做出通盘战略考虑的时刻,或是制定规划的时机已经来临。 《美国陆军无人机系统路线图(2010-2035)》为美国陆军研发、装备和在全谱作战中使用无人机系统提供了广阔视角,该路线图的主要理念将为持续学习和分析建立共同的基础。我们将不断评估这些观点,质疑这些假设,对无人机系统能力的各个领域都予以开发。该路线图将明确战斗功能概念,致力于完成基于能力的评估,并有助于新技术知情决策的发展(这些新技术将通过综合实验和测试完成评估)。最终,该路线图将回答这样的问题:“未来美国陆军需要具何种功能的无人机?” 正如《美国陆军核心概念》所述,在这个持久冲突的年代里,为了在不确定的、错综复杂的环境中有效作战,领导者必须明察战场纵深态势,部队行动要不断适应形势变化以先发制人并保持主动,在广阔地域内持续作战时需具备远距离快速作战能力。研发无人机系统,将其纳入到部队行动之中,将扩展陆军的态势感知能力,同时将提升陆军发现、定位和摧毁敌军的能力。我们也希望,在危险的严酷环境下,未来的无人机系统能够有助于快速反应和持续保障。 该路线图为无人机系统发展及其与陆军的一体化进程提供了革命性途径,路线图划分为三个时间段:近期发展阶段(2010-2015年),中期发展阶段(2016-2025年)和远期发展阶段(2026-2035年)。近期要在快速应用当前技术,满足陆战场需求的同时,关注当前无人机的能力差距。中期要把新出现的多用途无人机系统集成到陆军行动的全部领域之中,无论是“支援网络”或是“保障运输”。远期要进一步减小无人机系统的尺寸,减少重量,降低对动力的需求,同时关注于其性能改善。每两年我们将评估一次路线图,使其与作战需求、经验教训以及日新月异的新技术保持紧密联系。 第一版无人机系统路线图将为未来无人机系统发展提供新的方向,我们将不断对其予以修订,满足陆战场上勇士们的需要。 1.概述
实用标准文案 监管场所无人机系统 建设方案 北京创羿兴晟科技发展有限公司 2018.9
目录 目录 目录 (1) 一、概述 (2) 1.1、背景 (2) 1.2、应用 (2) 1.3、方案依据标准规范 (3) 二、系统介绍 (5) 2.1、系统功能 (5) 2.2、功能及产品介绍 (5) 2.2.1、六旋翼无人机主机 (5) 2.2.2、航拍摄像 (12) 2.2.3、空中抛投 (25) 2.2.4、通信中继..................................... 错误!未定义书签。 2.3、无人机综合管控指挥平台 (29) 2.3.1、平台内容 (30) 2.3.2、软件架构 (31) 2.3.3、通信架构 (31) 2.3.4、客户端界面 (32)
一、概述 1.1、背景 无人机产业发展至今,已经成长为了一个完整的体系,在这个体系之下,无人机从功能上细分到了各个领域,除了航拍、植保等功用之外,无人机也在勘察、安检等领域拥有不错的发挥,其中安全巡逻无人机已经成为无人机市场中的一匹迅速崛起的黑马,并且还在不断地快速成长。运用高科技手段对监狱工作提供技术支持已刻不容缓。作为高度戒备监狱,监狱押犯规模大、在押罪犯刑期长、犯群结构复杂,为积极整合资源、推动高新技术应用、完善综合保障机制、增强突发事件应对能力。 无人机可完成包括巡航、实时监控、取证拍摄等一体化飞行及监控任务,并能将高清视频或高像素照片实时传输到执法终端。今后,它不仅会用于监管设施及周边区域的隐患排查,维护监管安全,为监狱指挥中心作出实时部署提供第一手资料;它还对开展隐蔽督察、视频督察、掌握狱情灾情和处置突发事件发挥重要作用。
第38卷第4期激光与红外V o.l38,N o.4 2008年4月LA SER&I NFRA RED A pr i,l2008 文章编号:1001-5078(2008)04-0311-04#综述与评论#美国无人机的光电载荷与发展分析 王方玉 (空军驻京津地区军事代表室,辽宁锦州121000) 摘要:介绍了美国无人机光电载荷的发展历程以及装备的研制、改进情况,指出了在现代战 争中发展无人机的优势和重要性,重点探讨了几种无人机的性能及其特点,最后论述了美国无 人机的光电载荷与发展分析。 关键词:无人机;光电载荷;发展分析 中图分类号:TN97文献标识码:A E lectric-optic Load and Develop m ent Analysis of the A m erican UAV WANG Fang-yu (R es i dent R epresenta tive O ffi ce of A ir F orce in Be ijing-T ian ji ng,Ji n zhou121000,Ch i na) Ab stract:T he process o f deve l op m ent of the Am er ican UAV and equ i p m ents i n all countr i es over t he w or l d and its m odificati on are descr i bed.T he technique perfor m ance and properties of severa lUAV thea te seekers are ana l yzed;and the e l ectric-optic l oad and develop m ent analysis o f the Am erican UAV. K ey w ords:UAV;e l ectric-optic l oad;deve l op m ent ana l y si s 1引言 无人机采用先进的光电有效载荷,完成任务的能力将得到增强并最大限度地实现战场数字化,以提高其他武器系统的效能。本文就美国无人机的光电/红外传感器、红外传感器转塔、发展分析等,作进一步的研究和探讨[1]。 2光电/红外传感器 无人机的光电/红外传感器,主要包括:可见光传感器和红外光电传感器[2]。 可见光传感器的功能是光电成像,即将目标入射光子转变成对应像元的电子输出,最终形成目标的可见波段图像。目前最常用的器件是CCD和C MOS。CCD技术成熟,性能稳定,C MOS出现较晚,但由于功耗低等优点发展很快。 可见光传感器的主要性能指标:有效像元数、量子效率及其频段分布、最高帧频、读出噪声、热噪声等。 红外光电传感器的功能是红外波段的光电成像,即将目标入射的红外辐射(热辐射),转变成对应像元的电子输出,最终形成目标的热辐射图像。 红外光电传感器的主要性能指标:有效像元数、噪声等效温差(NETD)、工作温度和制冷方式、最高帧频、读出噪声、阵列均匀性和非线性误差。 例如,美国英迪戈系统公司的UL3红外摄像机,采用160@120微测辐射热计探测器阵列,使用F1.6镜头,可以获得优于80mK的灵敏度。包括光学系统在内,摄像机质量不到200g,需要的容积不超过50c m3,需要功率约1W。摄像机输出模拟视频和14比特数字信号。在/龙眼0无人机上可安装两台70g的摄像机和一台UL3红外摄像机,动力系统能够维持39m i n的飞行时间,拍摄时距离目标很近, 作者简介:王方玉(1964-),男,本科,工程师,研究方向为电子工程技术。 收稿日期:2007-10-01;修订日期:2007-11-01
美国2013-2038年度无人系统路线图 4.3 通信系统,频谱以及自主修复性 4.3.1 引言 所有的无人系统(而非完全自主的系统)主要面临的挑战在于通信链路的可用性、通信链路支持的数据量大小、频谱资源的分配、以及所以射频子系统对抗干扰的能力(如电磁干扰等)。为满足作战指挥的要求,各服务与机构之间的协同工作能力仍将需要继续改进。国防部无人系统需要对操作控制和任务数据分布进行处理,特别是对非自主的系统。因此,对于一些公司和大学,这类信息可以通过电缆传输,但对于高度移动的无人操作,用的电磁波信号(EMS)的传播方式将更加容易,或其他方式(例如,声学或光学)。 图13显示了支持无人系统所需要的通信网络体系结构(OV-1)。该架构中同时考虑了载人系统的设计,说明载人和无人传感器以及其他指挥与控制(C2)系统之间需要共同的通信基础设施支撑。辅助指挥、控制、通信和计算机(C4)的建设应该是平台无关的(载人或无人)。运行架构采用了多种环境管理系统的频段,通信网关和中继网站,数据中心和数据传播节点,以及地面广播和网络服务。在这种体系结构中的通信链路支持无人平台的指挥与控制以及和各自的有效载荷;并且支持将载荷的信息回传,用作战术、战略等意图。应当尽可能地将载荷任务数据及时驻留在全局数据中心,使世界各地的用户能够快速简便地发现、获取和分析实时和非实时的情报、监视和侦察(ISR)信息和其他任务的数据。第4.3.2节到第4.3.17节着重阐述了无人通信系统结构发展的需求及计划,并针对每个领域给出了适用的标准和系统指导。
图13. 高级辅助指挥、控制、通信和计算机(C4)结构运行概念图 4.3.2 当前无人通信系统存在的问题 过去十年内,美国在全球作战应用中操作的经验教训、详细分析研究和回顾、作战任务需求说明等都充分表明了指挥、控制、通信和计算机建设在支持无人平台方面的各种缺陷。具体包括: 全球连通性差:无人平台全球发送高带宽数据(例如,全运动视频)至战略战术用户的能力不足。目前无人驾驶的基础设施大部分集中在中东,无法支持全球其他地区的行动。 昂贵的卫星/网络合同:每个系统的卫星通信带宽的多是单独购买通过商业租赁。许多系统还依赖于单独的平台为中心的地面网络基础设施,以提供与战术,运营和战略消费者的连接。由于这种连接通常由租用商业网络提供,每个系统的开销成本进一步增加。 非模式化的基础设施:许多无人机系统程序建立供应商专有的通信解决方案,包括网站通信和接入地面网络基础设施。这种方法防止跨平台的资源共享,大大增加了基础设施的开销成本(例如,设施,项目管理),并抑制系统的互操作性。
综述 虽然第一次用机器人来自动完成日常的任务几乎可以追溯到20年前,但“服务机器人”的概念并不被人所知,直到1989年Joseph Engelberger在编著的《服务业中的机器人》一书中才被提出来。在《服务业中的机器人》一书中Engelberger已列出了至少15种不同的应用领域,这是他估计利用机器人技术帮助实现自动化的领域。 服务机器人应用领域包括:医学机器人技术、卫生保健和康复、商业清洁、家务、速食服务、农业、加油站服务员、军事服务、采矿业、建筑业、侦察、助老助残、消防和营救机器人、娱乐、物流、酒店及饭馆供餐和服务等。 1.服务机器人的应用现状以及技术发展水平现状 1.1 清洁机器人 2000年Prassler等人回顾了从上世纪八十年代中期到现在清洁机器人的发展。他们的调查了挑选的30台清洁机器人,范围从小型低价格的到高成本、高技术、大型自动化清洗机器人。科学家们将这30种清洁机器人分为家用清洁机器人和工业清洁机器人。家用清洁机器人包括真空吸尘器,清扫机器人以及地面洗刷机和水池清洗机器人。他们详细收集了12种不同的家用机器人,包括工业和研究原型以及已经成熟的商业产品。这个领域应用最广泛的应该是真空吸尘机器人。奇怪的是,过去几乎每年都宣称许多家用真空吸尘机器人将于近期投入商业化生产。但直到瑞典制造商Electrolux才真正迈出了第一步,向零售市场推出了真空吸尘的机器人。水池清洗机器人比真空吸尘机器人稍早出现。越来越多的零售商,尤其在美国,提供水池遥控清洗机器人。 Prassler等人深入研究了18种工业清洁机器人的发展。这个数据一点都不令人惊讶,因为在欧洲据估计每年商业清洁设备市场已达五百亿至一千亿欧元。这个数据包括研究原型,工业原型以及商业化的系统。虽然工业清洁人也具有类似的巨大市场,它只有两三个系统比较成熟,销售收入超过了其他十几个的销售收入,其中包括德国Hefter清洁技术公司的ST82 Variotech,以及美国的Servus机器人ScrubberVac。 1.2 用于建筑业的机器人技术 建筑业是最古老而且最庞大的经济部门之一。工业化国家建筑业占GDP的比例约为7-10%。建筑领域欧盟有大约270万家公司,大部分是小公司。另外,欧盟建筑公司销售额的前十名每个都介于50-150亿欧元。这些现象与制造业类似。然而,建筑业的先进性却不如其他行业如制造业,尤其与汽车、电子、火车、航空等相比,这些产业的研发投资比建筑业多两倍。 很明显现在建筑业与令人兴奋的科技发展相比自动化水平还很低。这就是为什么建筑业被视为下个世纪最有发展空间的领域。所有参与者——研究人员,公司和管理部门——都必须更加努力的提高这个重要部门的自动化水平。 建筑行业在机器人和自动化控制领域进行的研究根据应用情况可分为: t民用建筑; t房屋建筑; 未来20年(2002-2022) 欧洲机器人发展路线图选摘之一 o 王 伟 刘远江 李良琦 栏目主持:王 伟 6
【编者按】这项计划采用了DOTMLPF-P形式,从2009年至2047年描画了一系列创意。其内容在早期空军无人系统的经验和当前以及新兴的无人技术方面的进步之间实现了较好地平衡。这项新创立的计划把空军所有组织都集中到了共同的设想。通过共同努力,这一里程牌式的规划将更显示出独特性… 2047年前无人机计划出台 美军2047年前无人机计划引言 1.引言 1.1 目的 这项飞行计划是一个实现空军对未来无人机系统设想的可行计划。空军将落实计划所列的行动以发展无人机系统能力。鉴于新兴技术的动态特性,这项计划是一个活动的文件,随着标准的取得和新兴技术经过验证,可以对文件进行升级。详细来说,这项计划采用了DOTMLPF-P形式,从2009年至2047年描画了一系列创意。其内容在早期空军无人系统的经验和当前以及新兴的无人技术方面的进步之间实现了较好地平衡。这项新创立的计划把空军所有组织都集中到了共同的设想。通过共同努力,这一里程牌式的规划将更显示出独特性。这个设想就是一项空军的定位,即通过增强不断增加的自动化、模块化、可持续的无人机系统打造一支更加精干、更具适应性、可定制的部队,从而实现21世纪空中力量效能的最大化。 1.2假设 10项指导飞行计划发展的关键设想: 1、有人与无人系统的综合增加了在所有程度军事行动中联合作战的能力。 2、无人机系统在人员生理限制难以执行的任务中显得很突出(例如,持续,反应时间,污染环境)。 3、具有清晰、有效的人机接口的自动化是增加效能的关键,同时也有潜力减少成本、前向进入和风险。
4、空军要的结果是具有多种能力的“系统”性的产品(载荷、网络和处理分析分发)和更少的特殊平台。 5、适应性、可持续性和减少成本需要具有标准接口的模块化系统。 6、灵活、充足、可交互操作和健壮的指挥和控制(C2)产生了无人机系统监控能 力(有人回路)。 7、必须对DOTMLPF-P方案实施同步。 8、产业界可以及时为系统发展提供所需技术。 9、2047年代的战斗行动的程度、范围和致命性需要一种无人超级系统(system of systems)来减少任务和部队的风险,提供感知--行动执行线路。 10、在空军预算限制内飞行计划所规划的标准是可实现的。 1.3 设想 对空军来说这项飞行计划的设想是: λ什么情况下无人机系统可以替代传统有人系统任务。 λ利用不断增加的自动化、模块化和可持续性的系统来保持我们使用无人机系统的能力,并且通过无人机系统全套性能,打造更加精干、更加具有适应性、可定制的、可伸缩的部队,以实现联合部队的作战能力的最大化。 λ与其它军种、盟友、学术界和工业界合作开发利用无人机系统所提供的独有的一系列特点:持续能力、接驳性、弹性、自主和效率。 λ努力从无人机系统获得最多的东西用来增强联合作战能力,同时促进军种间的互相依靠,并且最明智地使用经费。 2047年前无人机计划背景 2.1基本环境 近代历史无人机系统经历了爆炸性增长,是空军提供给联合部队最急需的能力之一。在一系列全球军事行动中,持续性、效率、灵活性等特性和信息收集、攻击能力多次被证明是力量倍增器。无人机系统不仅向高级行动决策制定者提供信息,而且直接在战场或拥挤的城市环境中参与盟军行动。无人机系统可以帮助参战部队并且对事先设定的或高价值目标发起攻击。当附带伤害作为最主要考虑时,把附带伤害减到最小。无人机系统还具有利对用远程划分行动(RSO)概念的固有能力,在联合部队指挥官划定或国防 部长优选的责任区间展示价值。大多数空军无人机系统都是在不同地点间实现超视距操控,这样以来持续战斗能力更有效率,同时也节省了前进步伐。
无人机航测服务 计划书 家豪测绘集团 2017年1月
目录 第一章:发展现状与行业政策 (3) 一、发展现状 (3) 二、国家低空开放政策 (3) 第二章:市场分析 (5) 一、市场介绍 (5) 二、优先市场选择 (10) 第三章:商业模式和战略规划 (11) 一、市场定位 (11) 二、商业模式 (11) 三、产品和服务 (11) 四、战略规划 (11) 第四章:资金需求和公司组建 (13) 一、资金需求 (13) 二、团队建设 (13)
第一章:发展现状与行业政策 一、发展现状 国外,美国航空航天局将多种无人机应用于森林火灾监测、精确农业、海洋遥感等研究项目。澳大利亚也利用全球鹰搭载成像SAR进行海洋监测研究。在可见光遥感方面,国外的无人机低空摄影测量通常加载高精度的POS,自动化程度高,大大减少了地面控制的数量,国内的无人机航测尚无加载高精度POS的先例。国外无人机航测服务发展历史较长,应用广泛,总体上比较成熟,其研究水平属于先进水平,但因其航测服务价格昂贵,且后续数据分析处理及应用价格畸高,国内客户一般不能接受。与此同时,由于政府对国土资源、海洋等关系国家安全方面的考虑,一般不接受国外公司介入国内航测服务市场。 国内,在无人机航测广阔市场前景的吸引下,国内多家单位在无人机低空航测方面进行了大量有益的技术探索,积累了一定的经验,也做出了一些贡献。但是,但由于市场对技术要求很高,国内无人机航测技术大多处于科研项目阶段,达不到产业化的成熟服务,不能满足市场需求。 二、国家低空开放政策 自2010年11月,国务院、中央军委印发《关于深化我国低空空域管理改革的意见》,提出积极稳妥推进低空空域管理改革,最大限度盘活低空空域资源,促进通用航空事业健康有序发展以来,包括军委、空管委、民航局都在相继出台开放低空空域管理的相关政策。2014年,低空开放更
美军无人机部队分配情况整理 本文主要对美国空军(UNITED STATES AIR FORCE)、美国陆军航空兵(UNITED STATES ARMY AVIATION BRANCH)、美国海军(UNITED STATES NAVY)、美国海军陆战队(UNITED STATES MARINE CORPS)的无人机部队分配情况进行整理和说明。 名词解释 1. 空军部分 ACC:空军作战司令部 AFRC:空军预备役司令部 ANG:空军国民警卫队 USAFCENT:美国空军中央司令部 AFSOC:空军特种作战司令部 Reconnaissance Squadron:侦察中队 Electronic Combat Squadron:电子战中队 Special Operations Squadron: 特种作战中队 Attack Squadron:攻击中队
2.陆军航空兵部分 RQ-7A shadow platoon:RQ-7A影子无人机排Armed Reconnaissance Battalion:武装侦察营Military Inteligence Battalions:军事情报营 MQ-1C Gray Eagle Company:MQ-1C灰鹰无人机连队
3.海军部分 Helicopter Anti-Submarine (light) Squadron:反潜(轻型)直升机中队Helicopter Maritime Strike Squadron: 海上打击直升机中队 4.海军陆战队 marine aerial vehicle squadron:海军陆战队无人机中队