学习中心 姓 名 学 号 电子科技大学网络与继续教育学院 《自动控制原理》模拟试题一 一、简答题(共25分) 1、简述闭环系统的特点,并绘制闭环系统的结构框图。( 8分) 2、简要画出二阶系统特征根的位置与响应曲线之间的关系。( 10分) 3、串联校正的特点及其分类?( 7分) 二、已知某单位负反馈系统的开环传递函数为) 42()(2++= s s s K s G K ,试确定使系统产生持续振荡的K 值,并求振荡频率ω。( 15分) 三、设某系统的结构及其单位阶跃响应如图所示。试确定系统参数,1K 2K 和a 。( 15分) 四、某最小相角系统的开环对数幅频特性如图示。要求(20分) 1)写出系统开环传递函数; 2)利用相角裕度判断系统的稳定性; 3)将其对数幅频特性向右平移十倍频程,试讨论对系统性能的影响。 五、设单位反馈系统的开环传递函数为 ) 1()(+=s s K s G
试设计一串联超前校正装置,使系统满足如下指标:(25分) (1)在单位斜坡输入下的稳态误差151 ss e ; (2)截止频率ωc ≥7.5(rad/s); (3)相角裕度γ≥45°。 模拟试题一参考答案: 一、简答题 1、简述闭环系统的特点,并绘制闭环系统的结构框图。 解: 闭环系统的结构框图如图: 闭环系统的特点: 闭环控制系统的最大特点是检测偏差、 纠正偏差。 1) 由于增加了反馈通道, 系统的控制精度得到了提高。 2) 由于存在系统的反馈, 可以较好地抑制系统各环节中可能存在的扰动和由于器件的老化而引起的结构和参数的不确定性。 3) 反馈环节的存在可以较好地改善系统的动态性能。 2、简要画出二阶系统特征根的位置与响应曲线之间的关系。 解:
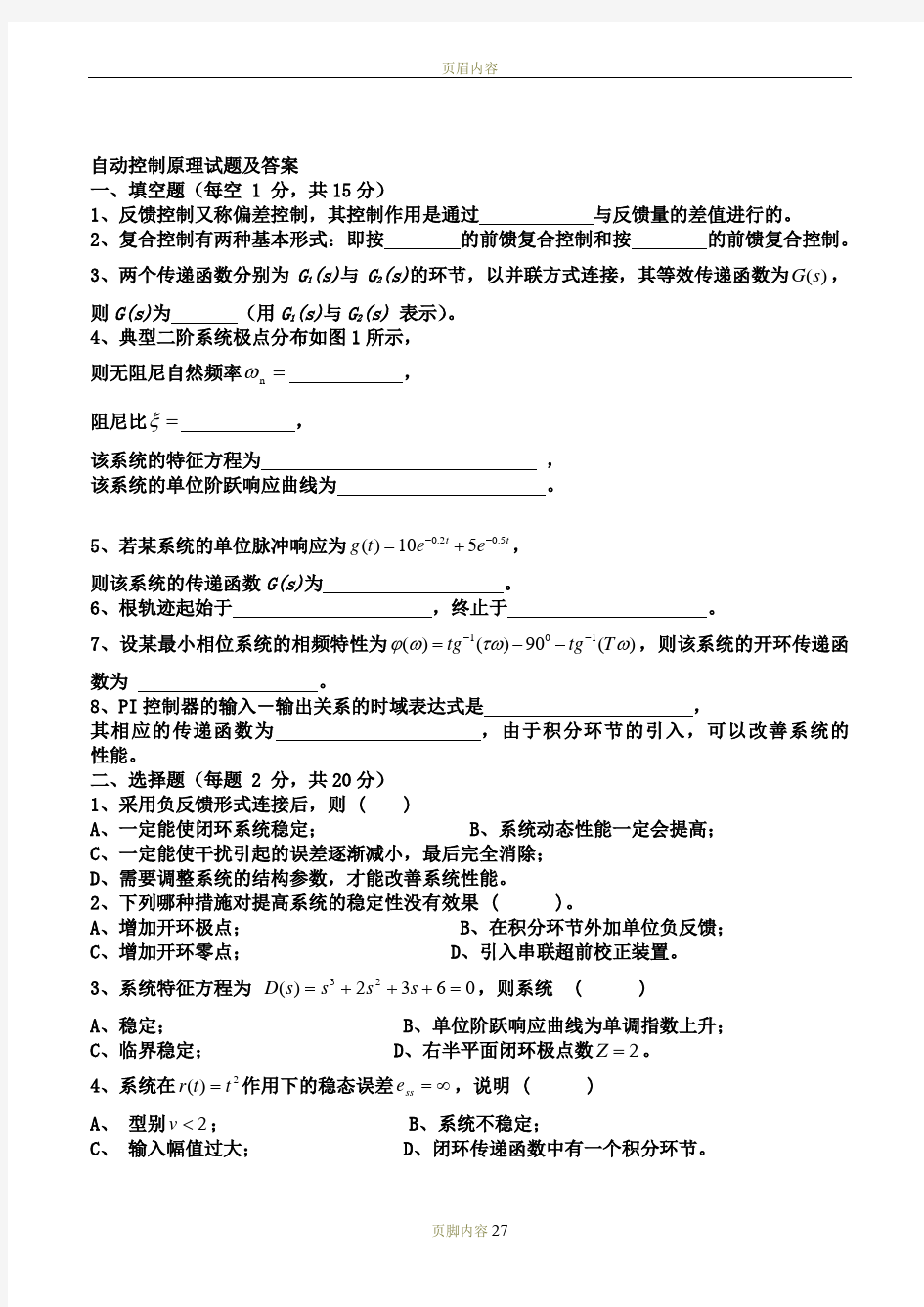
一、填空题(每空 1 分,共15分) 1、反馈控制又称偏差控制,其控制作用是通过 给定值 和反馈量的差值进行的。 2、复合控制有两种基本形式:即按 输入 的前馈复合控制和按 扰动 的前馈复合控制。 3、两个传递函数分别为G 1(s)和G 2(s)的环节,以并联方式连接,其等效传递函数为()G s ,则G(s)为G 1(s)+G 2(s)(用G 1(s)和G 2(s) 表示)。 4、典型二阶系统极点分布如图1所示, 则无阻尼自然频率=n ω 1.414 , 阻尼比=ξ 0.707 , 该系统的特征方程为 2220s s ++= , 该系统的单位阶跃响应曲线为 衰减振荡 。 5、若某系统的单位脉冲响应为0.20.5()105t t g t e e --=+, 则该系统的传递函数G(s)为1050.20.5s s s s +++。 6、根轨迹起始于 开环极点 ,终止于 开环零点 。 7、设某最小相位系统的相频特性为101()()90()tg tg T ?ωτωω--=--,则该系统的开环传递函数为 (1)(1) K s s Ts τ++。 1、在水箱水温控制系统中,受控对象为水箱,被控量为 水温 。 2、自动控制系统有两种基本控制方式,当控制装置和受控对象之间只有顺向作用而无反向联系时,称为 开环控制系统 ;当控制装置和受控对象之间不但有顺向作用而且还有反向联系时,称为 闭环控制系统 ;含有测速发电机的电动机速度控制系统,属于 闭环控制系统 。 3、稳定是对控制系统最基本的要求,若一个控制系统的响应曲线为衰减振荡,则该系统 稳定 。判断一个闭环线性控制系统是否稳定,在时域分析中采用劳斯判据;在频域分析中采用 奈奎斯特判据。 4、传递函数是指在 零 初始条件下、线性定常控制系统的 输出拉氏变换 和 输入拉氏变换 之比。 5、设系统的开环传递函数为2(1)(1)K s s Ts τ++,则其开环幅频特性为2222211 T τωωω++; 相频特性为arctan 180arctan T τωω--o (或:2180arctan 1T T τωωτω---+o ) 。
《 自动控制原理 》典型考试试题 (时间120分钟) 院/系 专业 姓名 学号 第二章:主要是化简系统结构图求系统的传递函数,可以用化简,也可以用梅逊公式来求 一、(共15分)已知系统的结构图如图所示。请写出系统在输入r(t)和扰动n(t)同时作用下的输出C(s)的表达式。 G4 H1G3 G1 G 2 N(s)C(s) R(s) - -+ + + 二 、(共15分)已知系统的结构图如图所示。 试求传递函数 )()(s R s C ,) () (s N s C 。 三、(共15分)已知系统的结构图如图所示。 试确定系统的闭环传递函数C(s)/R(s)。 G1 G2 R(s) - + + C(s) - + 四、(共15分)系统结构图如图所示,求X(s)的表达式
G4(s)G6(s) G5(s)G1(s) G2(s) N(s) C(s) R(s) -- G3(s) X(s) 五、(共15分)已知系统的结构图如图所示。 试确定系统的闭环传递函数C(s)/R(s)和C(s)/D(s)。 G1 G2 R(s) - + + C(s) -+ D(s) G3G4 六、(共15分)系统的结构图如图所示,试求该系统的闭环传递函数 ) () (s R s C 。 七、(15分)试用结构图等效化简求题图所示各系统的传递函数 ) () (s R s C
一、(共15分)某控制系统的方框图如图所示,欲保证阻尼比ξ=0.7和响应单位斜坡函数的稳态误差为ss e =0.25,试确定系统参数K 、τ。 二、(共10分)设图(a )所示系统的单位阶跃响应如图(b )所示。试确定系统参数,1K 2K 和a 。 三、(共15分)已知系统结构图如下所示。求系统在输入r(t)=t 和扰动信号d(t)=1(t)作用下的稳态误差和稳态输出)(∞C 2/(1+0.1s) R(s) - C(s) 4/s(s+2) E(s) D(s) 四、(共10分)已知单位负反馈系统的开环传递函数为: 2()(2)(4)(625) K G s s s s s = ++++ 试确定引起闭环系统等幅振荡时的K 值和相应的振荡频率ω 五、(15分)设单位反馈系统的开环传递函数为 1 2 ) 1()(23++++=s s s s K s G α 若系统以2rad/s 频率持续振荡,试确定相应的K 和α值 第三章:主要包括稳、准、快3个方面 稳定性有2题,绝对稳定性判断,主要是用劳斯判据,特别是临界稳定中出现全零行问题。 相对稳定性判断,主要是稳定度问题,就是要求所有极点均在s=-a 垂线左测问题,就是将s=w-a 代入D(s)=0中,再判断稳定 快速性主要是要记住二阶系统在0<ξ<1时的单位阶跃响应公式以及指标求取的公式。 准确性主要是稳态误差的公式以及动态误差级数两方面
燕山大学2018年《自动控制原理》考研大纲 一、课程的基本内容要求 1.掌握自动控制系统的工作原理、自动控制系统的组成与几种不同分类。重点掌握反馈的概念、基本控制方式、对控制系统的基本要求。 2.线性系统的数学模型 掌握传递函数;极点、零点;开环传递函数、闭环传递函数、误差传递函数的概念;典型环节的传递函数。掌握建立电气系统(有源网络和无源网络)、机械系统(机械平移系统)的微分方程和传递函数模型的方法。重点掌握方框图化简或信号流图梅森增益公式获得系统传递函数的建模方法。 3.控制系统时域分析 要求能够分析系统的三大基本性能,即系统的稳(稳定性)、准(准确性)、快(快速性)。掌握如下概念:稳定性;动态(或暂态)性能指标(最大超调量、上升时间、峰值时间、调整时间);稳态(静态)性能指标(稳态误差);一阶、二阶系统的主要特征参量;欠阻尼、临界阻尼、过阻尼系统特点;主导极点。重点掌握系统稳定性判别(Routh判据);稳态误差终值计算(包括三个稳态误差系数的计算);二阶系统动态性能指标计算。掌握利用主导极点对高阶系统模型的简化与性能分析。 4.根轨迹法 要求能够利用根轨迹(闭环系统特征方程的根随系统参数变化在S平面所形成的轨迹)分析系统性能。需掌握的概念:根轨迹;常规根轨迹;相角条件、幅值条件;根轨迹增益。重点掌握常规根轨迹的绘制(零度根轨迹不作要求)。掌握增加开环零、极点对根轨迹的影响;利用根轨迹分析系统稳定性与具有一定的动态响应特性(如衰减振荡、无超调等特性)的方法。 5.控制系统频域分析 要求能够利用频域分析方法对控制系统进行分析与设计。掌握如下概念:频率特性;开环频率特性、闭环频率特性;最小相位系统;幅值穿越频率(剪切频率)、相角穿越频率、相角裕度、幅值裕度;谐振频率、谐振峰值;截止频率、频带宽度;三频段。重点掌握开环频率特性Nyquist图、Bode图的绘制;由
《自动控制原理》模拟试卷四 一、填空题(每空1分,共20分) 1、 对自动控制系统的基本要求可以概括为三个方面, 即: _____ 、快速性和 _____________ 2、 控制系统的 _______________________________________ 称为传递函数。一阶系统传函标 准形式是 __________________ ,二阶系统传函标准形式是 ____________________ 。 3、 在经典控制理论中,可采用 _____________ 、根轨迹法或 _____________ 等方法判断线性 控制系统稳定性。 4、 控制系统的数学模型,取决于系统 _________ 和 , 与外作用及初始条件无关。 5、 线性系统的对数幅频特性,纵坐标取值为 _______________ ,横坐标为 __________ 。 6、 奈奎斯特稳定判据中, Z = P - R ,其中P 是指 ________________________________ ,Z 是 指 __________________________ , R 指 _________________________________ 。 7、 在二阶系统的单位阶跃响应图中, t s 定义为 _________________ 。匚%是 _________________ 8、 PI 控制规律的时域表达式是 _________________________ 。P I D 控制规律的传递函数表达 式是 ________________________________ 。 ,则其开环幅频特性为 s (T 1s 1)(T 2S 1) 性为 ________________________ 二、判断选择题(每题2分,共16分) 1、关于线性系统稳态误差,正确的说法是: () A 、 一型系统在跟踪斜坡输入信号时无误差 C 增大系统开环增益 K 可以减小稳态误差; D 增加积分环节可以消除稳态误差,而且不会影响系统稳定性。 2、适合应用传递函数描述的系统是 ( )。 A 、 单输入,单输出的线性定常系统; B 、 单输入,单输出的线性时变系统; C 、 单输入,单输出的定常系统; D 、 非线性系统。 9、设系统的开环传递函数为 __________ ,相频特 稳态误差计算的通用公式是 e ss .. S 2R (S ) lim —— s 刃 1 G(s)H(s) 3、若某负反馈控制系统的开环传递函数为 ,则该系统的闭环特征方程为 s (s 1) )。 A 、s(s 1) =0 B 、 s(s 1) 5 = 0 C 、s(s 1) 1 =0 D 、与是否为单位反馈系统有关
答案 一、填空题(每空1分,共15分) 1、稳定性 快速性 准确性 稳定性 2、()G s ; 3、微分方程 传递函数 (或结构图 信号流图)(任意两个均可) 4、劳思判据 根轨迹 奈奎斯特判据 5 01112()90()()tg T tg T ?ωωω--=--- 6、0()()()()t p p p i K de t m t K e t e t dt K T dt τ=++? 1()(1)C p i G s K s T s τ=++ 7、S 右半平面不存在系统的开环极点及开环零点 二、判断选择题(每题2分,共 20分) 1、A 2、B 3、D 4、C 5、C 6、B 7、A 8、C 9、C 10、D 三、(8分)建立电路的动态微分方程,并求传递函数。 解:1、建立电路的动态微分方程 根据KCL 有 2 00i 10i )t (u )]t (u )t (d[u )t (u )t (u R dt C R =-+- (2分) 即 )t (u )t (du )t (u )()t (du i 2i 21021021R dt C R R R R dt C R R +=++ (2分) 2、求传递函数 对微分方程进行拉氏变换得 )(U )(U )(U )()(U i 2i 21021021s R s Cs R R s R R s Cs R R +=++ (2分) 得传递函数 2 121221i 0)(U )(U )(R R Cs R R R Cs R R s s s G +++== (2分) 四、(共20分) 解:1、(4分) 22222221)()()(n n n s s K s K s K s K s K s K s R s C s ωξωωβ++=++=++==Φ
一、 填空题 1、线性定常连续控制系统按其输入量的变化规律特性可分为_恒值控制_系统、随动系统和_程序控制_系统。 2、传递函数为 [12(s+10)] / {(s+2)[(s/3)+1](s+30)} 的系统的零点为_-10_, 极点为_-2__, 增益为_____2_______。 3、构成方框图的四种基本符号是: 信号线、比较点、传递环节的方框和引出点 。 4、我们将 一对靠得很近的闭环零、极点 称为偶极子。 5、自动控制系统的基本控制方式有反馈控制方式、_开环控制方式和_复合控制方式_。 6、已知一系统单位脉冲响应为t e t g 5.16)(-=,则该系统的传递函数为 。 7、自动控制系统包含_被控对象_和自动控制装置两大部分。 8、线性系统数学模型的其中五种形式是微分方程、传递函数、__差分方程_、脉冲传递函数_、__方框图和信号流图_。 9、_相角条件_是确定平面上根轨迹的充分必要条件,而用_幅值条件__确定根轨迹上各 点的根轨迹增益k*的值。当n-m ≥_2_时, 开环n 个极点之和等于闭环n 个极点之和。 10、已知一系统单位脉冲响应为 t e t g 25.13)(-=,则系统的传递函数为_ _。 11、当∞→ω时比例微分环节的相位是: A.90 A.ο 90 B.ο 90- C.ο45 D.ο 45- 12、对自动控制的性能要求可归纳为_稳定性__、_快速性_和准确性三个方面, 在阶跃 响应性能指标中,调节时间体现的是这三个方面中的_快速性___,而稳态误差体现的是_稳定性和准确性_。 13、当且仅当离散特征方程的全部特征根均分布在Z 平面上的_单位圆 _内,即所有特征根的模均小于___1____,相应的线性定常离散系统才是稳定的。 14、下列系统中属于开环控制系统的是 D.普通数控加工系统
自动控制原理 一、简答题:(合计20分, 共4个小题,每题5分) 1. 如果一个控制系统的阻尼比比较小,请从时域指标和频域指标两方面 说明该系统会有什么样的表现?并解释原因。 2. 大多数情况下,为保证系统的稳定性,通常要求开环对数幅频特性曲 线在穿越频率处的斜率为多少?为什么? 3. 简要画出二阶系统特征根的位置与响应曲线之间的关系。 4. 用根轨迹分别说明,对于典型的二阶系统增加一个开环零点和增加一 个开环极点对系统根轨迹走向的影响。 二、已知质量-弹簧-阻尼器系统如图(a)所示,其中质量为m 公斤,弹簧系数为k 牛顿/米,阻尼器系数为μ牛顿秒/米,当物体受F = 10牛顿的恒力作用时,其位移y (t )的的变化如图(b)所示。求m 、k 和μ的值。(合计20分) F ) t 图(a) 图(b) 三、已知一控制系统的结构图如下,(合计20分, 共2个小题,每题10分) 1) 确定该系统在输入信号()1()r t t =下的时域性能指标:超调量%σ,调 节时间s t 和峰值时间p t ; 2) 当()21(),()4sin3r t t n t t =?=时,求系统的稳态误差。
四、已知最小相位系统的开环对数幅频特性渐近线如图所示,c ω位于两个交接频率的几何中心。 1) 计算系统对阶跃信号、斜坡信号和加速度信号的稳态精度。 2) 计算超调量%σ和调节时间s t 。(合计20分, 共2个小题,每题10分) [ 1 %0.160.4( 1)sin σγ =+-, s t = 五、某火炮指挥系统结构如下图所示,()(0.21)(0.51) K G s s s s = ++系统最 大输出速度为2 r/min ,输出位置的容许误差小于2,求: 1) 确定满足上述指标的最小K 值,计算该K 值下的相位裕量和幅值裕量; 2) 前向通路中串联超前校正网络0.41 ()0.081 c s G s s +=+,试计算相位裕量。 (合计20分, 共2个小题,每题10分) (rad/s)
自动控制原理试卷A(1) 1.(9分)设单位负反馈系统开环零极点分布如图所示,试绘制其一般根轨迹图。 (其中-P 为开环极点,-Z ,试求系统的传递函数及单位脉冲响应。 3.(12分)当ω从0到+∞变化时的系统开环频率特性()()ωωj j H G 如题4图所示。K 表示开环增益。P 表示开环系统极点在右半平面上的数目。v 表示系统含有的积分环节的个数。试确定闭环系统稳定的K 值的范围。 4.(12分)已知系统结构图如下,试求系统的传递函数 ) () (, )()(s R s E s R s C 5.(15分)已知系统结构图如下,试绘制K 由0→+∞变化的根轨迹,并确定系统阶跃响应分别为衰减振荡、单调衰减时K 的取值范围。 Re Im ∞→ω00→ωK 2-0,3==p v (a ) Re Im ∞ →ω00 →ωK 2-0,0==p v (b ) Re Im ∞→ω00→ωK 2-2 ,0==p v (c ) 题4图 题2图 1G 2G 3 G 5 G C R +E -- 4G +6 G
6.(15分)某最小相位系统用串联校正,校正前后对数幅频特性渐近线分别如图中曲线(1)、(2)所示,试求校正前后和校正装置的传递函数)(),(),(21s G s G s G c ,并指出Gc (S )是什么类型的校正。 7.(15分)离散系统如下图所示,试求当采样周期分别为T=0.1秒和T=0.5秒输入 )(1)23()(t t t r ?+=时的稳态误差。 8.(12分)非线性系统线性部分的开环频率特性曲线与非线性元件负倒数描述曲线如下图 所示,试判断系统稳定性,并指出) (1 x N - 和G (j ω)的交点是否为自振点。
洛阳理工学院 2010/2011 学年第二学期自动控制原理期末考试试题卷(B) 适用班级:B 考试日期时间:适用班级: 一、判断题。正确的打√,错误的打×。(每小题1分,共10分) 1.传递函数是线性定常系统的一种内部描述模型。() 2.劳斯判据是判断线性定常系统稳定性的一种代数判据。() 3.频域分析法是根据闭环系统的频率特性研究闭环系统性能的一种图解方法。( ) 4.频率响应是系统在正弦输入信号下的全部响应。() 5.绘制系统Bode图时,低频段曲线由系统中的比例环节(放大环节)和微积分环节决定( ) 6.对于线性定常系统,若开环传递函数不包括积分和微分环节,则当0 ω=时,开环幅相特性曲线(Nyquist图)从正虚轴开始。() 7.开环控制系统的控制器和控制对象之间只有正向作用,系统输出量不会对控制器产生任何影响。() 8.Ⅰ型系统,当过渡过程结束后,系统对斜坡输入信号的跟踪误差为零。() 9.控制系统分析方法中,经典控制理论的分析方法有频域分析法、根轨迹分析法、时域分析法。() 10.已知某校正网络传递函数为 1 () 1 s G s as + = + ,当满足a>1条件时,则该校正网络为滞后校正网络。() 二、单选题(每小题2分,共20分) 1.下述()属于对闭环控制系统的基本要求。 (A)稳定性(B)准确性(C)快速性(D)前面三个都是 2.分析线性控制系统动态性能时,最常用的典型输入信号是()。 (A)单位脉冲函数(B)单位阶跃函数 (C)单位斜坡函数(D)单位加速度函数 3.典型二阶系统阻尼比等于1时,称该系统处于()状态。 (A)无阻尼(B)欠阻尼(C)临界阻尼(D)系统不稳定或临界稳定 4.稳定最小相位系统的Nyquist图,其增益(幅值)裕度()。 (A)0 hdB<(B)0 hdB>(C)1 hdB<(D)1 hdB> 5.单位反馈控制系统的开环传递函数为 4 () (5) G s s s = + ,则系统在()2 r t t =输入作用下,其稳态误差为()。 (A)10 4 (B) 5 4 (C) 4 5 (D)0 6.一个线性系统的稳定性取决于()。 (A)系统的输入(B)系统本身的结构和参数
期末考试-复习重点 自动控制原理1 一、单项选择题(每小题1分,共20分) 1. 系统和输入已知,求输出并对动态特性进行研究,称为( ) A.系统综合 B.系统辨识 C.系统分析 D.系统设计 2. 惯性环节和积分环节的频率特性在( )上相等。 A.幅频特性的斜率 B.最小幅值 C.相位变化率 D.穿越频率 3. 通过测量输出量,产生一个与输出信号存在确定函数比例关系值的元件称为( ) A.比较元件 B.给定元件 C.反馈元件 D.放大元件 4. ω从0变化到+∞时,延迟环节频率特性极坐标图为( ) A.圆 B.半圆 C.椭圆 D.双曲线 5. 当忽略电动机的电枢电感后,以电动机的转速为输出变量,电枢电压为输入变量时,电动机可看作一个( ) A.比例环节 B.微分环节 C.积分环节 D.惯性环节 6. 若系统的开环传 递函数为 2) (5 10 +s s ,则它的开环增益为( ) A.1 B.2 C.5 D.10 7. 二阶系统的传递函数5 2 5 )(2++= s s s G ,则该系统是( ) A.临界阻尼系统 B.欠阻尼系统 C.过阻尼系统 D.零阻尼系统 8. 若保持二阶系统的ζ不变,提高ωn ,则可以( ) A.提高上升时间和峰值时间 B.减少上升时间和峰值时间 C.提高上升时间和调整时间 D.减少上升时间和超调量 9. 一阶微分环节Ts s G +=1)(,当频率T 1 = ω时,则相频特性)(ωj G ∠为( ) A.45° B.-45° C.90° D.-90° 10.最小相位系统的开环增益越大,其( ) A.振荡次数越多 B.稳定裕量越大 C.相位变化越小 D.稳态误差越小 11.设系统的特征方程为()0516178234=++++=s s s s s D ,则此系统 ( ) A.稳定 B.临界稳定 C.不稳定 D.稳定性不确定。 12.某单位反馈系统的开环传递函数为:()) 5)(1(++= s s s k s G ,当k =( )时,闭环系统临界稳定。 A.10 B.20 C.30 D.40 13.设系统的特征方程为()025103234=++++=s s s s s D ,则此系统中包含正实部特征的个数有( ) A.0 B.1 C.2 D.3 14.单位反馈系统开环传递函数为()s s s s G ++= 65 2 ,当输入为单位阶跃时,则其位置误差为( ) A.2 B.0.2 C.0.5 D.0.05 15.若已知某串联校正装置的传递函数为1 101 )(++= s s s G c ,则它是一种( )
2017年自动控制原理期末考试卷与答案 一、填空题(每空 1 分,共20分) 1、对自动控制系统的基本要求可以概括为三个方面,即: 稳定性 、快速性和 准确性 。 2、控制系统的 输出拉氏变换与输入拉氏变换在零初始条件下的比值 称为传递函数。 3、在经典控制理论中,可采用 劳斯判据(或:时域分析法)、根轨迹法或奈奎斯特判据(或:频域分析法) 等方法判断线性控制系统稳定性。 4、控制系统的数学模型,取决于系统 结构 和 参数, 与外作用及初始条件无关。 5、线性系统的对数幅频特性,纵坐标取值为20lg ()A ω(或:()L ω),横坐标为lg ω 。 6、奈奎斯特稳定判据中,Z = P - R ,其中P 是指 开环传函中具有正实部的极点的个数,Z 是指 闭环传函中具有正实部的极点的个数,R 指 奈氏曲线逆时针方向包围 (-1, j0 )整圈数。 7、在二阶系统的单位阶跃响应图中,s t 定义为 调整时间 。%σ是超调量 。 8、设系统的开环传递函数为12(1)(1) K s T s T s ++频特性为 01112()90()() tg T tg T ?ωωω--=---。 9、反馈控制又称偏差控制,其控制作用是通过 给定值 与反馈量的差值进行的。 10、若某系统的单位脉冲响应为0.20.5()105t t g t e e --=+,则该系统的传递函数G(s)为 105 0.20.5s s s s + ++。 11、自动控制系统有两种基本控制方式,当控制装置与受控对象之间只有顺向作用而无反向联系时,称为 开环控制系统;当控制装置与受控对象之间不但有顺向作用而且还有反向联系时,称为 闭环控制系统;含有测速发电机的电动机速度控制系统,属于 闭环控制系统。 12、根轨迹起始于开环极点,终止于开环零点。 13、稳定是对控制系统最基本的要求,若一个控制系统的响应曲线为衰减振荡,则该系统 稳定。判断一个闭环线性控制系统是否稳定,在时域分析中采用劳斯判据;在频域分析中采用奈奎斯特判据。 14、频域性能指标与时域性能指标有着对应关系,开环频域性能指标中的幅值越频率c ω对应时域性能指标 调整时间s t ,它们反映了系统动态过程的快速性
A 卷 一、填空题(每空 1 分,共10分) 1、 在水箱水温控制系统中,受控对象为 ,被控量为 。 2、 对自动控制的性能要求可归纳为___________、快速性和准确性三个方面, 在阶跃响应性能指标中,调节时间体现的是这三个方面中的______________,而稳态误差体现的是______________。 3、 闭环系统的根轨迹起始于开环传递函数的 ,终止于开环传递函数的 或无穷远。 4、 PID 控制器的输入-输出关系的时域表达式是 ,其相应的传递函数为 。 5、 香农采样定理指出:如采样器的输入信号e(t)具有有限宽带,且有直到ωh 的频率分量,则使信号e(t) 完满地从采样信号e*(t) 中恢复过来的采样周期T 要满足下列条件:________________。 二、选择题(每题 2 分,共10分) 1、 设系统的传递函数为G (S )=1 52512++s s ,则系统的阻尼比为( )。 A .21 B .1 C .51 D .25 1 2、 非单位负反馈系统,其前向通道传递函数为G(S),反馈通道传递函数为H(S),当输入信号为R(S),则从输入端定义的误差E(S)为 ( ) A 、 ()()()E S R S G S =? B 、()()()()E S R S G S H S =?? C 、()()()()E S R S G S H S =?- D 、()()()() E S R S G S H S =- 3、 伯德图中的低频段反映了系统的( )。 A .稳态性能 B .动态性能 C .抗高频干扰能力 D ..以上都不是 4、 已知某些系统的开环传递函数如下,属于最小相位系统的是( )。 A 、 (2)(1)K s s s -+ B 、(1)(5K s s s +-+) C 、2(1)K s s s +- D 、(1)(2) K s s s -- 5、 已知系统的开环传递函数为 100(0.11)(5)s s ++,则该系统的开环增益为 ( )。 A 、 100 B 、1000 C 、20 D 、不能确定
《 自动控制原理B 》 试题A 卷答案 一、单项选择题(本大题共5小题,每小题2分,共10分) 1.若某负反馈控制系统的开环传递函数为 5 (1) s s +,则该系统的闭环特征方程为 ( D )。 A .(1)0s s += B. (1)50s s ++= C.(1)10s s ++= D.与是否为单位反馈系统有关 2.梅逊公式主要用来( C )。 A.判断稳定性 B.计算输入误差 C.求系统的传递函数 D.求系统的根轨迹 3.关于传递函数,错误的说法是 ( B )。 A.传递函数只适用于线性定常系统; B.传递函数不仅取决于系统的结构参数,给定输入和扰动对传递函数也有影响; C.传递函数一般是为复变量s 的真分式; D.闭环传递函数的极点决定了系统的稳定性。 4.一阶系统的阶跃响应( C )。 A .当时间常数较大时有超调 B .有超调 C .无超调 D .当时间常数较小时有超调 5. 如果输入信号为单位斜坡函数时,系统的稳态误差为无穷大,则此系统为( A ) A . 0型系统 B. I 型系统 C. II 型系统 D. III 型系统 二、填空题(本大题共7小题,每空1分,共10分) 1.一个自动控制系统的性能要求可以概括为三个方面:___稳定性、快速性、__准确性___。 2.对控制系统建模而言,同一个控制系统可以用不同的 数学模型 来描述。 3. 控制系统的基本控制方式为 开环控制 和 闭环控制 。 4. 某负反馈控制系统前向通路的传递函数为()G s ,反馈通路的传递函数为()H s ,则系统 的开环传递函数为()()G s H s ,系统的闭环传递函数为 () 1()() G s G s H s + 。 5 开环传递函数为2(2)(1) ()()(4)(22) K s s G s H s s s s s ++= +++,其根轨迹的起点为0,4,1j --±。 6. 当欠阻尼二阶系统的阻尼比减小时,在单位阶跃输入信号作用下,最大超调量将 增大 。 7.串联方框图的等效传递函数等于各串联传递函数之 积 。 三、简答题(本题10分) 图1为水温控制系统示意图。冷水在热交换器中由通入的蒸汽加热,从而得到一定温度的热水。冷水流量变化用流量计测量。试绘制系统方框图,并说明为了保持热水温度为期望值,系统是如何工作的?系统的被控对象和控制装置各是什么?
《自动控制原理》(科目代码845)考试大纲这个大纲是2017年9月25日浙大控制官网才出的,虽然是新的,但是和以前基本 一模一样,没有变化。 参考书目: (1)各出版社出版的各种自动控制原理教材及习题集 (2)孙优贤、王慧主编. 自动控制原理.北京:化工出版社,2011年6月 (3)胡寿松主编. 自动控制原理(第四版、第五版、第六版). 分别于2001年2月、 2007年6月、2013年5月由科学出版社的(该书初版于1979年,前三版均由国防工业出版社出版,亦可作为参考书) 特别提醒:本考试大纲仅适合报考2018级浙江大学控制科学与工程学院硕 士研究生、专业课考《自动控制原理》(科目代码845)的考生。该门课程的 满分为150分。 一、总的要求 全面掌握自动控制系统的基本概念与原理,深入理解与掌握自动控制系统分析与 综合设计的方法,并能用这些基本的原理与方法举一反三地分析问题、解决问题。 二、基本要求 (1)自动控制的一般概念:掌握自动控制的基本概念、基本原理与自动控制系统组 成、分类,能熟练地将具体对象的控制系统物理结构图表示抽象成控制系统的方块图表示,能清楚地分析其中各种物理量、信息流之间的关系。 (2)动态系统的数学模型:能建立给定典型环节与系统的数学模型,包括微分方程、 传递函数、状态空间等模型;能熟练地通过方块图简化方法与信号流图等方法获得系统总的传递函数;能根据要求进行各种数学模型之间的相互转换。 (3)线性时不变连续系统的时域分析:熟悉一阶、二阶及高阶系统的特征,掌握基 于微分方程模型的时域分析,包括微分方程的求解、拉普拉斯变换的应用;状态空间模型的求解与分析;系统时间响应的性能指标计算;系统的稳定性分析、稳态误差系数与稳态误差的计算等。 (4)根轨迹:掌握根轨迹法的基本概念、根轨迹绘制的基本法则及推广法则;能正 确绘制根轨迹并利用根轨迹分析方法进行系统性能的分析,根据性能要求进行设计。
一、填空题(每空1分,共15分) 1、反馈控制又称偏差控制,其控制作用是通过给定值与反馈量的差值进行的。 2、复合控制有两种基本形式:即按输入的前馈复合控制和按扰动的前馈复合控制。 3、两个传递函数分别为G1(s)与G2(s)的环节,以并联方式连接,其等效传递函数为() G s,则G(s) 为G1(s)+G2(s)(用G1(s)与G2(s)表示)。 4、典型二阶系统极点分布如图1所示, ω, 则无阻尼自然频率= n 7 其相应的传递函数为,由于积分环节的引入,可以改善系统的稳态性能。 1、在水箱水温控制系统中,受控对象为水箱,被控量为水温。 2、自动控制系统有两种基本控制方式,当控制装置与受控对象之间只有顺向作用而无反向联系时,称为开环控制系统;当控制装置与受控对象之间不但有顺向作用而且还有反向联系时,称为闭环控制系统;含有测速发电机的电动机速度控制系统,属于闭环控制系统。 3、稳定是对控制系统最基本的要求,若一个控制系统的响应曲线为衰减振荡,则该系统稳定。判断一个闭环线性控制系统是否稳定,在时域分析中采用劳斯判据;在频域分析中采用奈奎斯特判据。 4、传递函数是指在零初始条件下、线性定常控制系统的输出拉氏变换与输入拉氏变换之比。
5、设系统的开环传递函数为2(1)(1) K s s Ts τ++ arctan 180arctan T τωω--。 6、频域性能指标与时域性能指标有着对应关系,开环频域性能指标中的幅值穿越频率c ω对应时域性能指标调整时间s t ,它们反映了系统动态过程的。 1、对自动控制系统的基本要求可以概括为三个方面,即:稳定性、快速性和准确性。 是指闭环传系统的性能要求可以概括为三个方面,即:稳定性、准确性和快速性,其中最基本的要求是稳定性。 2、若某单位负反馈控制系统的前向传递函数为()G s ,则该系统的开环传递函数为()G s 。 3、能表达控制系统各变量之间关系的数学表达式或表示方法,叫系统的数学模型,在古典控制理 论中系统数学模型有微分方程、传递函数等。 4、判断一个闭环线性控制系统是否稳定,可采用劳思判据、根轨迹、奈奎斯特判据等方法。
自动控制原理试卷 一. 是非题(5分): (1)系统的稳态误差有系统的开环放大倍数k 和类型决定的( ); (2)系统的频率特性是系统输入为正弦信号时的输出( ); (3)开环传递函数为)0(2>k s k 的单位负反馈系统能跟深速度输入信号( ); (4)传递函数中的是有量纲的,其单位为 ( ); (5)闭环系统的极点均为稳定的实极点,则阶跃响应是无 调的( ); 二. 是非题(5分): (1)为了使系统的过度过程比较平稳要求系统的相角裕量大于零( ); (2)Bode 图的横坐标是按角频率均匀分度的,按其对数值标产生的( ); (3)对于最小相位系统,根据对数幅频特性就能画出相频特性( ); (4)单位闭环负反馈系统的开环传递函数为) ()()(s D s N s G =,劳斯稳定判据是根据)(s D 的系数判闭环 系统的稳定性( );奈奎斯特稳定判据是根据)(s G 的幅相频率特性曲线判闭环系统的稳定性 ( )。 三. 填空计算题(15分): (1)如图所示:RC 网络,其输出)(t u c 与输入)(t u r 的微分方程描述为 ,假定在零初始条件下,系统的传递函数)(s φ= ,该系统在)(1)(t t u r =作用时,有)(t u c = 。 (2)系统结构如图,该系统是 反馈系 统,是 阶系统,是 型系统,若要使系统的放大系数为1,调节时间为0.1秒(取%σ的误差带),0k 应为 ,t k 应
为 。 (3)如果单位负反馈系统的开环传递函数是) )(()()(b s a s c s k s G +++=,该系统是 阶系统,是 型系统,该系统的稳态位置误差系数为 ,稳态速度误差系数为 ,稳态加速度误差系数为速度误差系数为 。 四. 是非简答题(5分): (1)已知某系统的开环传递函数在右半s 平面的极点数为,试叙述Nyquist 稳定判据的结论。 (2)试叙述系统稳定的充分必要条件。 (3)系统的稳定性不仅与系统结构有关,而且与输入信号有关,该结论是否正确。 (4)增加系统的开环放大倍数,系统的稳定性就变差,甚至变为不稳定,该结论是否正确。 五.计算题(10分) 已知某电路的微分方程为: t t i d t i C t U t U t i R t U d t i t i C t U t U t i R t U ??=+=-=+=)(1)()()()(])()([1)() ()()(22002212111111 其中)(t U i 为输入,)(0t U 为输出,2211,,,C R C R 均为常数,试建立系统方筷图,并求传递函数。 六. 计算题(15分) 某非单位反馈控制系统如图所示,若),(1*20)(t t r =,(1)求系统的稳态输出)(∞c ,及max c ,超调量%σ和调整时间s t 。(2)试画出单位阶跃响应曲线,并标出s t 及max c ,)(∞c 。
《自动控制原理》考研大纲 科目名称:控制理论 适用专业:仿生装备与控制工程 参考书目:《自动控制原理》第六版,胡寿松编,科学出版社; 《自动控制理论》第二版,邹伯敏编,机械工业出版社; 《现代控制理论基础》第二版,王孝武主编,机械工业出版社 考试时间:3小时 考试方式:笔试 总分:150分 考试范围:包括经典控制理论(不包含非线性部分)与现代控制理论两部分,经典控制理论内容占70%,现代控制理论内容占30%。 经典控制理论部分 第一章绪论 1. 掌握自动控制系统的工作原理、自动控制系统的组成与几种不同分类。 2. 重点掌握反馈的概念、基本控制方式、对控制系统的基本要求。 第二章线性系统的数学模型 控制理论的两大任务是系统分析与系统设计,系统分析和设计中首先要建立被研究系统的数学模型。本章主要给出古典控制理论使用的系统数学模型——传递函数的建立。 本章要求: 1.掌握的概念:传递函数;极点、零点;开环传递函数、闭环传递函数、误差传递函数;典型环节的传递函数。 2.重点掌握建立电气系统、机械系统的微分方程和传递函数模型的方法。 3.重点掌握方框图化简或信号流图梅森增益公式获得系统传递函数的建模方法。 第三章控制系统时域分析 根据研究系统采用的不同数学模型,分析方法是不同的,本章给出利用系统传递函数数学模型求取时间响应的系统时域分析法。主要是分析系统的三大基本性能,即系统的稳(稳定性)、准(准确性)、快(快速性)。稳定性是系统工作的必要条件;快速性和相对稳定程度(振荡幅度)是评价系统动态响应的性能指标;准确性是指系统稳态响应的稳态精度,用稳态误差来衡量,需注意:讨论的稳态误差是指由输入信号和系统结构引起的系统稳态时的误差。 本章要求: 1.掌握的概念:稳定性;动态(或暂态)性能指标(最大超调量、上升时间、峰值时间、调整时间);稳态(静态)性能指标(稳态误差);一阶、二阶系统的主要特征参量;欠阻尼、临界阻尼、过阻尼系统特点;主导极点。 2.重点掌握系统稳定性判别(Routh判据);稳态误差终值计算(包括三个稳态误差系数的计算);二阶系统动态性能指标计算。 3.掌握利用主导极点对高阶系统模型的简化与性能分析。 第四章根轨迹法 闭环系统特征方程的根(系统闭环极点)在S平面的分布完全决定了系统的稳定性、主要决定了系统的动态性能,因此利用根轨迹(闭环系统特征方程的根随系统参数变化在S 平面所形成的轨迹)可对系统性能进行分析。根轨迹法是经典控制理论系统分析与设计的两大主要方法之一,是利用开环传递函数分析闭环系统性能。根轨迹绘制依据根轨迹方程(由
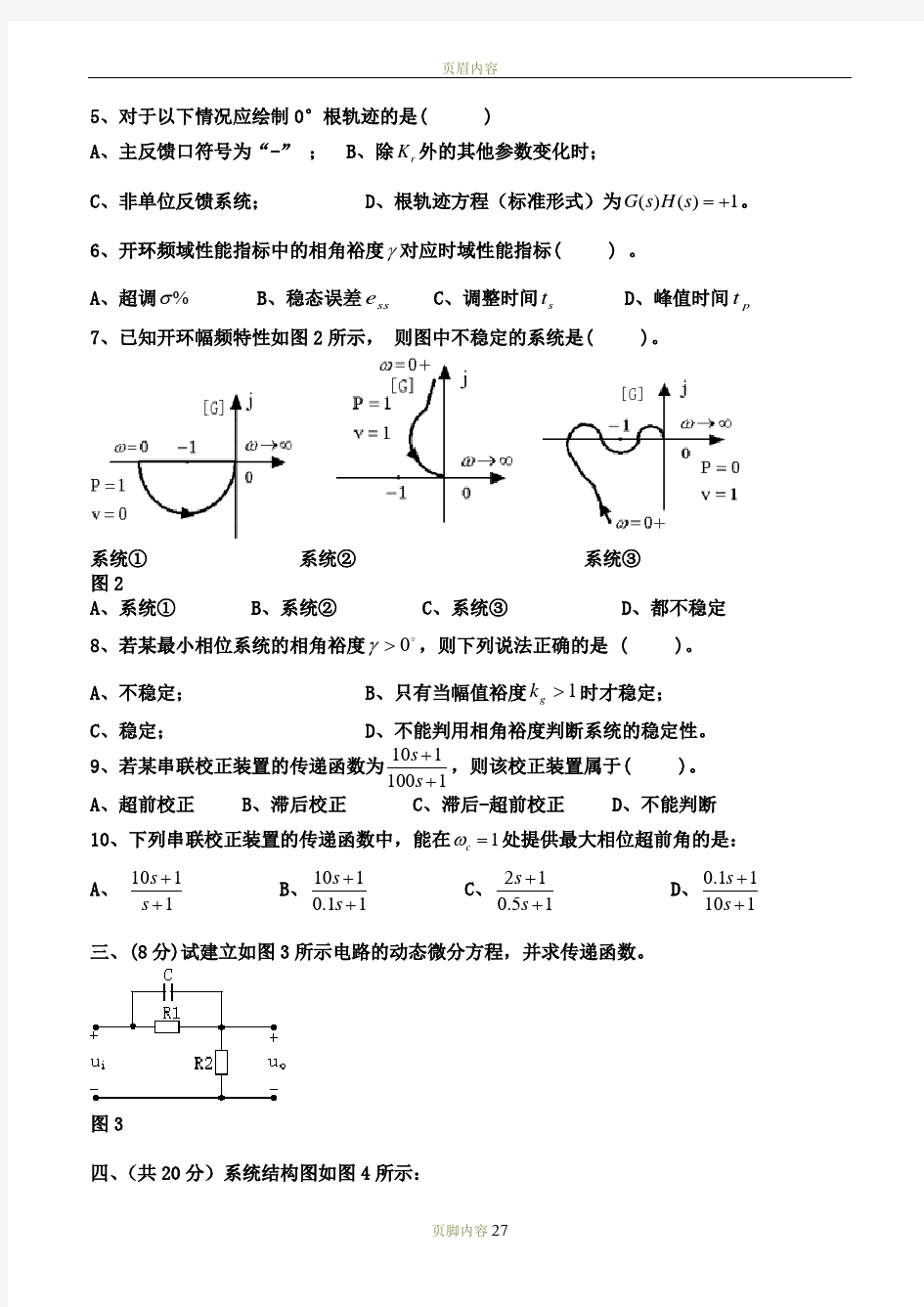
学习中心 姓 名 学 号 西安电子科技大学网络与继续教育学院 《自动控制原理》模拟试题一 一、简答题(共25分) 1、简述闭环系统的特点,并绘制闭环系统的结构框图。( 8分) 2、简要画出二阶系统特征根的位置与响应曲线之间的关系。( 10分) 3、串联校正的特点及其分类( 7分) 二、已知某单位负反馈系统的开环传递函数为) 42()(2++=s s s K s G K ,试确定使系 统产生持续振荡的K 值,并求振荡频率ω。( 15分) 三、设某系统的结构及其单位阶跃响应如图所示。试确定系统参数,1K 2K 和a 。( 15分) 四、某最小相角系统的开环对数幅频特性如图示。要求(20分) 1)写出系统开环传递函数; 2)利用相角裕度判断系统的稳定性; 3)将其对数幅频特性向右平移十倍频程,试讨论对系统性能的影响。 五、设单位反馈系统的开环传递函数为 ) 1()(+= s s K s G 试设计一串联超前校正装置,使系统满足如下指标:(25分) (1)在单位斜坡输入下的稳态误差151 模拟试题一参考答案: 一、简答题 1、简述闭环系统的特点,并绘制闭环系统的结构框图。 解: 闭环系统的结构框图如图: 闭环系统的特点: 闭环控制系统的最大特点是检测偏差、 纠正偏差。 1) 由于增加了反馈通道, 系统的控制精度得到了提高。 2) 由于存在系统的反馈, 可以较好地抑制系统各环节中可能存在的扰动和由于器件的老化而引起的结构和参数的不确定性。 3) 反馈环节的存在可以较好地改善系统的动态性能。 2、简要画出二阶系统特征根的位置与响应曲线之间的关系。 解: 3、串联校正的特点及其分类 答:串联校正简单, 较易实现。设于前向通道中能量低的位置,减少功耗。主要形式有相位超前校正、相位滞后校正、相位滞后-超前校正。 二、已知某单位负反馈系统的开环传递函数为) 42()(2 ++=s s s K s G K ,试确定使系统产生持续振荡的K 值,并求振荡频率ω。 自 动 控 制 理 论 2011年7月23日星期六 课程名称: 自动控制理论 (A/B 卷 闭卷) 一、填空题(每空 1 分,共15分) 1、反馈控制又称偏差控制,其控制作用是通过 与反馈量的差值进行的。 2、复合控制有两种基本形式:即按 的前馈复合控制和按 的前馈复合控制。 3、两个传递函数分别为G 1(s)与G 2(s)的环节,以并联方式连接,其等效传递函数为()G s ,则G(s)为 (用G 1(s)与G 2(s) 表示)。 4、典型二阶系统极点分布如图1所示, 则无阻尼自然频率=n ω , 阻尼比=ξ , 该系统的特征方程为 , 该系统的单位阶跃响应曲线为 。 5、若某系统的单位脉冲响应为0.20.5()105t t g t e e --=+, 则该系统的传递函数G(s)为 。 6、根轨迹起始于 ,终止于 。 7、设某最小相位系统的相频特性为101()()90()tg tg T ?ωτωω--=--,则该系统的开环传递函数为 。 8、PI 控制器的输入-输出关系的时域表达式是 , 其相应的传递函数为 ,由于积分环节的引入,可以改善系统的 性能。 二、选择题(每题 2 分,共20分) 1、采用负反馈形式连接后,则 ( ) A 、一定能使闭环系统稳定; B 、系统动态性能一定会提高; C 、一定能使干扰引起的误差逐渐减小,最后完全消除; D 、需要调整系统的结构参数,才能改善系统性能。 2、下列哪种措施对提高系统的稳定性没有效果 ( )。 A 、增加开环极点; B 、在积分环节外加单位负反馈; C 、增加开环零点; D 、引入串联超前校正装置。 3、系统特征方程为 0632)(23=+++=s s s s D ,则系统 ( ) A 、稳定; B 、单位阶跃响应曲线为单调指数上升; C 、临界稳定; D 、右半平面闭环极点数2=Z 。自动控制原理考试试题库(DOC)
相关主题
文本预览