2010-4-7
2010-4-7
主要内容
Swarm仿真程序的建立
Swarm仿真程序的层次结构 Swarm仿真程序的建立步骤
2010-4-7
2010-4-7
1. Swarm仿真程序的层次结构
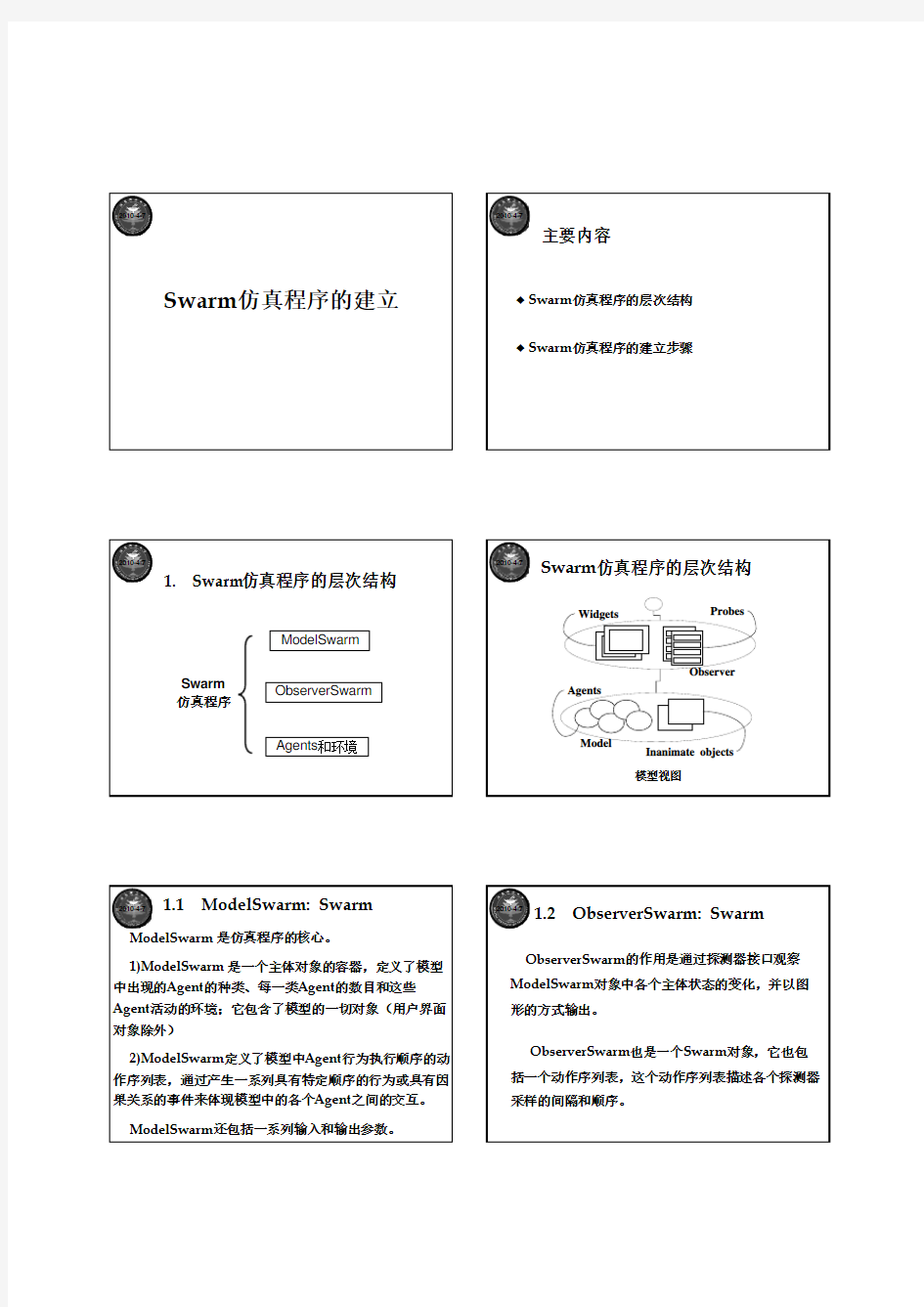
Swarm仿真程序的层次结构
Widgets Probes
ModelSwarm
Observer
Swarm 仿真程序
ObserverSwarm
Agents
Agents和环境
Model
Inanimate objects 模型视图
2010-4-7
1.1 ModelSwarm: Swarm
2010-4-7
1.2 ObserverSwarm: Swarm
ObserverSwarm的作用是通过探测器接口观察
ModelSwarm 是仿真程序的核心。 1)ModelSwarm 是一个主体对象的容器,定义了模型 中出现的Agent的种类、每一类Agent的数目和这些 Agent活动的环境;它包含了模型的一切对象(用户界面 对象除外) 2)ModelSwarm定义了模型中Agent行为执行顺序的动 作序列表,通过产生一系列具有特定顺序的行为或具有因 果关系的事件来体现模型中的各个Agent之间的交互。 ModelSwarm还包括一系列输入和输出参数。 ObserverSwarm也是一个Swarm对象,它也包 括一个动作序列表,这个动作序列表描述各个探测器 采样的间隔和顺序。 ModelSwarm对象中各个主体状态的变化,并以图 形的方式输出。
2010-4-7
1.3 仿真主体和环境Agent : SwarmObject
Swarm仿真过程中,模型中的Agent与现实系统中的
2010-4-7
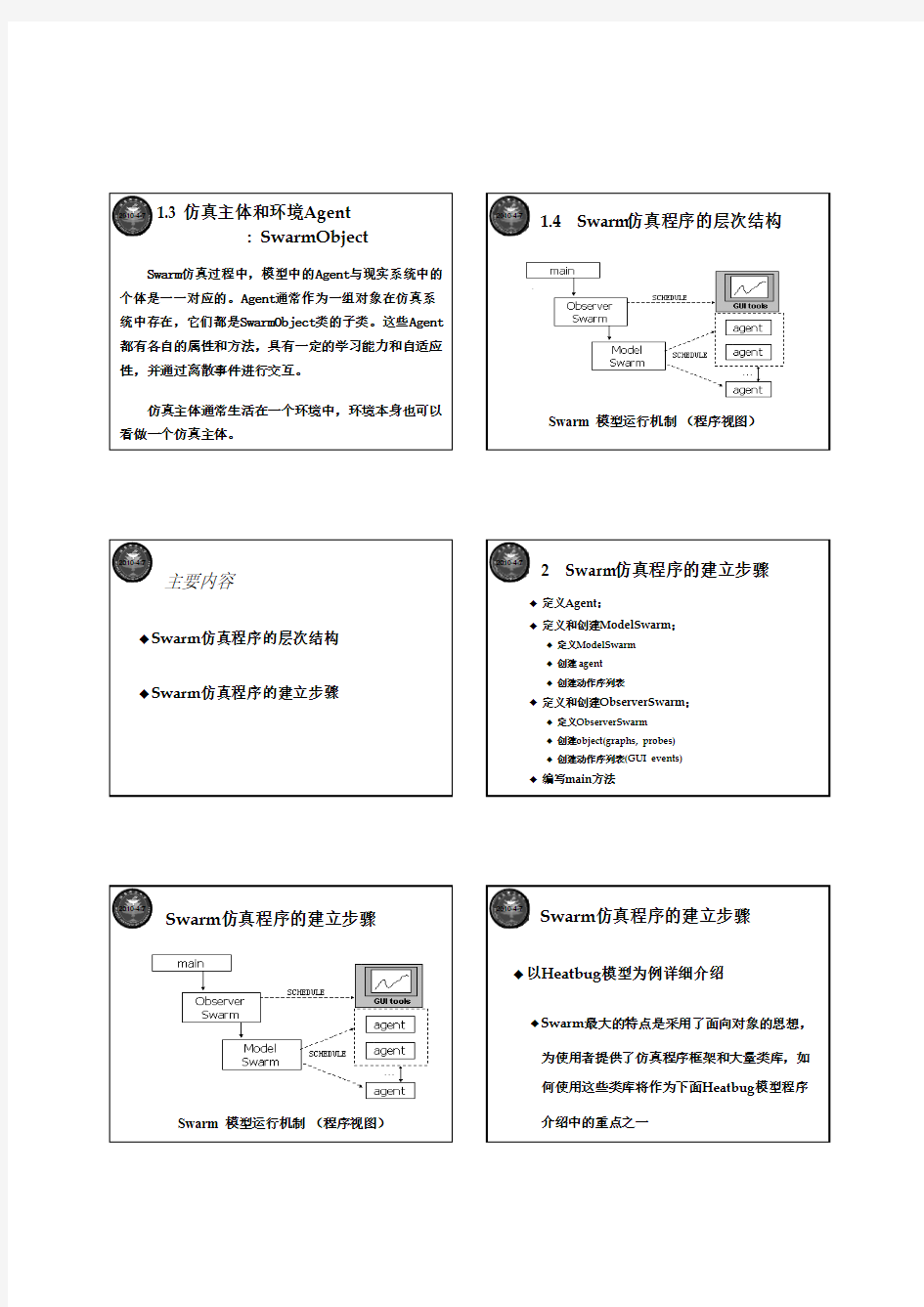
1.4 Swarm仿真程序的层次结构
个体是一一对应的。Agent通常作为一组对象在仿真系 统中存在,它们都是SwarmObject类的子类。这些Agent 都有各自的属性和方法,具有一定的学习能力和自适应 性,并通过离散事件进行交互。 仿真主体通常生活在一个环境中,环境本身也可以 看做一个仿真主体。
Swarm模型运行机制 (程序视图)
2010-4-7
2010-4-7
主要内容
Swarm仿真程序的层次结构 Swarm仿真程序的建立步骤
2 Swarm仿真程序的建立步骤
定义Agent; 定义和创建ModelSwarm;
定义ModelSwarm 创建 agent 创建动作序列表
定义和创建ObserverSwarm;
定义ObserverSwarm 创建object(graphs, probes) 创建动作序列表(GUI events)
编写main方法
2010-4-7
Swarm仿真程序的建立步骤
2010-4-7
Swarm仿真程序的建立步骤
以Heatbug模型为例详细介绍
Swarm最大的特点是采用了面向对象的思想, 为使用者提供了仿真程序框架和大量类库,如 何使用这些类库将作为下面Heatbug模型程序
Swarm模型运行机制 (程序视图)
介绍中的重点之一
2010-4-7
Heatbug模型背景简介
在一个二维网格上随机分布着一定数量的热虫。模
2010-4-7
Heatbug模型设计
main
型中的环境有一空间属性——热量,并随时间传播与消 散。每只热虫有自己理想温度的标准,它们总是向着与 自己的理想温度接近的某个方向移动,同时它们也向环 境放射出热量,使环境的温度提高。所处位置的温度越 接近理想温度,它们的“不满意”程度越低。随着仿真时 间的推进,这些热虫会聚集在几处,保持相对稳定的分 布,并且它们的平均不满意程度在不断降低。
World heatbugList heat Space heatbug Heatbug Model Swarm Heatbug Observer Swarm Graph
2010-4-7
Heatbug模型实现——仿真程序建立
定义Heatbug; 定义和创建HeatbugModelSwarm;
定义HeatbugModelSwarm 创建 Heatbug 创建动作序列表
2010-4-7
步骤一 : 定义Heatbug(1/7)
@interface Heatbug: SwarmObject { double unhappiness; } - step; - step; @end
定义格式:
定义和创建HeatbugObserverSwarm;
定义HeatbugObserverSwarm 创建object(graphs, probes) 创建动作序列表(GUI events)
Heatbug是模型框架库中SwarmObject的子类,它从父类继承 了内存管理接口和对探测器的支持等属性和方法,但不具备仿 真主体Heatbug应有特殊属性和方法,这些需要重新定义 定义内容包括新变量和新方法,{ }内是对Heatbug新变量的定 义,{ }后面是Heatbug的新方法,如step 。
编写mian方法
2010-4-7
步骤一:定义Heatbug(2/7)
Swarm编程是 面向对象的
2010-4-7
步骤一:定义Heatbug(3/7) Setp方法
@interface HeatBug : SwarmObject
Super class
{
double unhappiness;
}
NW
Sub classes
N
HeatBug
NE E SE
W SW
-step;
@end
Instance Variables Methods
S
2010-4-7
步骤一:定义Heatbug(4/7)
2010-4-7
步骤一:定义Heatbug (5/7)
Setp方法
现在所在位置的热度 heatHere 与 idealTemperature 比较 计算不满意度 unhappiness 如果 unhappiness = 0 ,则不进行移动 如果 unhappiness ≠ 0 ,向周围寻找一个理想点,进行一 次随机移动 程序规定两只 heatbug 不能在同一个单元中,移动前确定 周围是否布满heatbug(即周围8个单元格都被占据),如 果布满则不进行移动 所有Heatbug是顺序执行Setp方法的
在本模型中主体还包括heatspace & heat和world,它 们是主体活动的环境,对它们也需要定义 Heatspace从Diffuse2d (space的子类) 继承,不需定 义新的属性变量,但需要定义吸收热量(heatbug释 放的)等与外界交互的新方法 Heat从SwarmObject继承,需重新定义其属性变量和 方法,用于存储、变更二维空间的坐标位置 World则是直接引入Grid2d类,不需定义新的属性和 方法
2010-4-7
步骤一:定义Heatbug (6/7)
2010-4-7
步骤一:定义Heatbug (7/7)
space
activity
defobj
Int2d Filer
Discrete2d
Object2d Display
Value2d Display
Swarm
SwarmGUI
objectbase
Collection
gui
DblBuffer 2d
Grid2d
Probe
analysis
simtools
random
Space
tkobjc
Conway Life
Ca2d Diffuse 2d
heatspace
2010-4-7
Heatbug模型设计
2010-4-7
Heatbug模型实现——仿真程序建立
定义Heatbug; 定义和创建HeatbugModelSwarm;
定义HeatbugModelSwarm 创建 Heatbug 创建动作序列表
完成了定义,创建工作在 下一步骤中进行
定义和创建HeatbugObserverSwarm;
heatbug World heat Space 定义HeatbugObserverSwarm 创建object(graphs, probes) 创建动作序列表(GUI events)
编写main方法
2010-4-7
步骤二:定义和创建
步骤二:定义和创建
HeatbugModelSwarm
主要包括:
HeatbugModelSwarm
HeatbugModelSwarm 是 Swarm类的一个实 例,用它能够方便地创 建heatbug等主体对象
heatbug ModelSwarm main
定义HeatbugModelSwarm 创建HeatbugModelSwarm
创建 objects 创建动作序列表
heatspace
2010-4-7
定义HeatbugModelSwarm
定义格式:
@interface HeatbugModelSwarm: Swarm { int numBugs; int numBugs; } - step; - buildObjects; @end
2010-4-7
创建HeatbugModelSwarm
createBegin,createEnd —Initializing 初始化内存和参数 buildObjects 创建模型中的对象 buildActions 创建行为序列 activate 激活 ModelSwarm
HeatbugModelSwarm是Swarm的子类,它从父类 继承了内存管理接口和对探测器的支持等属性和方法 定义内容包括新变量和新方法:{ }内是对 HeatbugModelSwarm新变量的定义, { } 后面是 HeatbugModelSwarm的新方法
2010-4-7
1: Initializing
初始化主要完成内存分配和参数设置
+createBegin: (id) aZone { HeatbugModelSwarm *obj; obj = [super createBegin: aZone]; obj->numBugs = 100; obj->worldXSize = 80; obj->worldYSize = 80; obj->randomMoveProbability = 0.0; return obj; }
2010-4-7
Memory zones
每一个对象都是在一个内存区中建立的, Swarm的软件支持库中的 Defobj 类为对象提 供了内存分配的支持, Defobj定义Swarm对象 的底层部分,也就是说,它能够用一种潜在的 机制为每一个对象提供足够的内存
2010-4-7
Where did that zone come from?
2010-4-7
Where did that zone come from?
In main.m : initSwarm (argc, argv);
activity
defobj
在defobj & simtools执行 一个函数建立全局内存区
Swarm
SwarmGUI
objectbase
Collection
gui
In main.m: modelSwarm= [ModelSwarm create: globalZone]; 在Swarm 的父类defobj中使用 create: 方法,它再调用 ModelSwarm中createBegin方法
Probe
analysis
simtools
random
Space
tkobjc
In ModelSwarm.m: +createBegin:
2010-4-7
2: Building the agents
2010-4-7
2: Building the agents
hbug = [Heatbug createBegin: self];
[hbug setWorld: world Heat: heat];
-buildObjects {
创建heatbug对象
[super buildObjects]; world = [Grid2d create: self setSize X: worldXSize Y: worldYSize]; …… buildObjects方法是 for (i = 0; i < numBugs; i++) ModelSwarm的方法,可以用 { 它来创建仿真所需的每一个主体 Heatbug * hbug; int idealTemp, outputHeat; 实例(这些主体在前面步骤一中 …… 已经定义过heatbug、world、 hbug = [Heatbug createBegin: self]; heatspace等),并在仿真开始 return self; 时把相关参数传递给这些实例 }
设置必要的参数
[hbug setIdealTemperature: idealTemp]; [hbug setOutputHeat: outputHeat];
……
完成初始化并返回 对象实例
hbug = [hbug createEnd];
2010-4-7
3: Building schedules
2010-4-7
3: Building schedules
-buildActions { modelActions = [ActionGroup create: self]; [modelActions createActionTo: heat message: M(stepRule)]; …… modelSchedule=[Schedule createBegin: self]; [modelSchedule setRepeatInterval: 1]; modelSchedule = [modelSchedule createEnd]; …… [modelSchedule at: 0 createActionTo: aheatbug message: M(step)]; 动作序列表分为两部分: return self; modelActions(ActionGroup类的实例) } 和modelSchedule (Schedule类的实例)
-buildActions { modelActions = [ActionGroup create: self]; [modelActions createActionTo: …… modelSchedule=[Schedule createBegin: self]; [modelSchedule setRepeatInterval: 1]; modelSchedule = [modelSchedule createEnd]; …… [modelSchedule at: 0 createActionTo: aheatbug message: M(step)]; return self; } buildAction方法是ModelSwarm 的方法,可以用它创建动作序列表 来安排创建完的仿真对象的动作。 heat message: M(stepRule)];
2010-4-7
3: Building schedules
defobj
2010-4-7
3: Building schedules
t=0 t=1 t=2 [heat steprule]
Collection Keyed Collection Map Action Group Schedule Swarm [heatbugList step] [heat updateLattic]
创建动作序列表的核心就是把 包含一组序列动作Actions的 actionGroup 加入到Schedule 对象中,在设置的Schedule重 复间隔内actionGroup 中的动 作得到执行
Ordered Set
Swarm Process
2010-4-7
2010-4-7
3: Building schedules
modelSchedule = [Schedule create: self setRepeatInterval: 1]; [modelSchedule at: 0 createAction: modelActions];
3: Building schedules
modelActions = [ActionGroup create: self]; [modelActions createActionTo: heat message: M(stepRule)]; actionForEach = [modelActions createActionForEach: heatbugList message: M(step)]; [modelActions createActionTo: heat message: M(updateLattice)];
t=0
t=1
t=2 [heat steprule] [heatbugList step] [heat updateLattic]
Schedule定义了起始时间、重 复间隔、行为组对象,本模 型中起始时间为 0,重复间隔 为 1,每个仿真时钟
ActionGroup中的动作执行一 次,触发条件是modelActions
t=0
t=1
t=2 [heat steprule] [heatbugList step] [heat updateLattic]
actionGroup指定了顺序执行 的动作,本模型中主要是三 个动作 [heat steprule] [heatbugList step] [heat updateLattic]
2010-4-7
2010-4-7
4: Activating the Swarm
-activateIn: (id) swarmContext { [super activateIn: swarmContext];
3: Building schedules
modelSchedule = [Schedule create: self setRepeatInterval: 1]; [modelSchedule at: 0 createAction: modelActions];
t=0 [modelSchedule activateIn: self]; return [self getActivity];
modelActions = [ActionGroup create: self]; [modelActions createActionTo: heat message: M(stepRule)]; actionForEach = [modelActions createActionForEach: heatbugList message: M(step)]; [modelActions createActionTo: heat message: M(updateLattice)];
t=1
} 激活通过执行父类swarmContext 中的activateIn方法即可实现
t=2
2010-4-7
Heatbug模型设计
2010-4-7
Heatbug模型实现—仿真程序建立
定义Heatbug; 定义和创建HeatbugModelSwarm;
定义HeatbugModelSwarm
Heatbug Model Swarm heatbug
创建 Heatbug 创建动作序列表
定义和创建HeatbugObserverSwarm;
World heat Space 定义HeatbugObserverSwarm 创建object(graphs, probes) 创建动作序列表(GUI events)
heatbugList
编写mian方法
2010-4-7
步骤三:定义和创建
2010-4-7
HeatbugObserverSwarm
主要包括 定义HeatbugObserverSwarm 创建HeatbugObserverSwarm
创建object(graphs, probes) 创建动作序列表(GUI events)
定义HeatbugObserverSwarm
定义HeatbugObserverSwarm与定义HeatbugModelSwarm 类似,定义格式与HeatbugModelSwarm 类似, HeatbugObserverSwarm定义的新变量可以分为三类:仿真 参数、动作序列表数据结构、所包含的子对象 与HeatbugModelSwarm 的差别在于 HeatbugObserverSwarm不是通用Swarm类的子类,而是 GUISwarm的子类,定义的新变量也大多引用 gui等类的子类 @interface HeatbugObserverSwarm: GUISwarm id
2010-4-7
2010-4-7
定义HeatbugObserverSwarm
定义HeatbugObserverSwarm
tkobjc
activity
defobj
Widget
Colormap
Swarm
SwarmGUI
objectbase
Collection
gui
Graph Raster Histogram
Probe
analysis
simtools
EZGraph
Space
tkobjc
ZoomRaster
2010-4-7
2010-4-7
创建HeatbugObserverSwarm
创建HeatbugObserverSwarm与创建HeatbugModelSwarm 类似,其框架主要通过以下方法创建 + createBegin: aZone; - createEnd; - buildObjects; - buildActions; - activateIn: swarmContext;
创建HeatbugObserverSwarm
createBegin,createEnd — Initializing 初始化内存和参数 buildObjects 创建 graphs等 buildActions 定义 GUI events的动作序列表 Activate 激活
2010-4-7
Creating objects
HeatbugObserverS warm中包含的对 象都支持探测器 Probe
2010-4-7
How the probes come in...
A custom ProbeMap with 1 MessageProbes
A ProbeMap
MessageProbe
Model Swarm
Observer Swarm
VarProbes Object
A custom ProbeMap with 4 VariableProbes
ControlPanel is provided by kernel
2010-4-7
2010-4-7
Creating objects
- buildObjects { HeatbugObserverSwarm中包含的对象有: [super buildObjects]; Colormap颜色表
Creating objects
tkobjc
worldRaster二维显示构件
modelSwarm = [ModelSwarm create: self]; [controlPanel setStateStopped];
heatbugDisplay热虫分布图
Widget Colormap
等等 [modelSwarm buildObjects]; 这些对象用来显示模型,它们都支持探测器Probe,其中多数是 tkobjc等类库的各类继承而来,创建时代码编写比较复杂,这里以 (create Colormap)
(create worldRaster) return self; }
Graph Raster Histogram
数据图表unhappyGraph为例进行讲解
(create heatbugDisplay)
ZoomRaster
2010-4-7
Creating objects
unhappyGraph = HeatbugList被提交给unhappyGraph对象,它通过 [EZGraph create: self setTitle: "Unhappiness of bugs vs. time" heatbug的getUnhappiness消息从HeatbugList中提取不满 setAxisLabelsX: "time" Y: "unhappiness" setWindowGeometryRecordName: "unhappyGraph"];
Building schedules
ObserverSwarm的动作序列表描述各个探测器采样 的间隔顺序: heatDisplay heatbugDisplay worldRaster
意程度unhappiness的数据,计算出这些数据的平均值
[unhappyGraph enableDestroyNotification: self 之后,在图上相应位置产生一个数据点。 notificationMethod: @selector (_unhappyGraphDeath_:)];
[unhappyGraph createAverageSequence: "unhappiness" withFeedFrom: [heatbugModelSwarm getHeatbugList] andSelector: M(getUnhappiness)]; return self; }
GUI update
2010-4-7
Merging two Swarms
[modelSwarm create: self]; [modelSwarm buildObjects]; [modelSwarm buildActions]; [modelSwarm activateIn: self];
2010-4-7
Merging two Swarms
main( ) 产生 ObserverSwarm ObserverSwarm在其内存区内 产生 ModelSwarm 作为 subswarm [modelSwarm create: self]; [modelSwarm buildObjects]; [modelSwarm buildActions]; [modelSwarm activateIn: self];
将HeatbugModelSwarm和 HeatbugObserverSwarm合 并在一起,一个完整的模型 就建立起来了
Observer -create: aZone;
-buildObjects; -buildActions; -activateIn: swarmContext; ModelSwarm 在 ObserverSwarm中得到激活再 产生 agents
Observer -create: aZone;
-buildObjects; -buildActions; -activateIn: swarmContext;
Model
Model
2010-4-7
Heatbug模型设计
2010-4-7
Heatbug模型实现—仿真程序建立
定义Heatbug; 定义和创建HeatbugModelSwarm;
Model Swarm
Observer Swarm
Graph Object2dDisplay
定义HeatbugModelSwarm 创建 Heatbug 创建动作序列表
World heatbugList
heat Space
Raster Value2dDisplay Colormap
定义和创建HeatbugObserverSwarm;
定义HeatbugObserverSwarm 创建object(graphs, probes) 创建动作序列表(GUI events)
编写mian方法
2010-4-7
步骤四: 编写main方法
main()是任何一个可以运行程序所必须的函数,是程序运行时所 调用的第一个函数,同时也是仿真程序建立的最后一步 程序运行时main(),它再调用initSwarm来初始化整个Swarm类 库,然后创建Swarm顶层对象,即ObserverSwarm 调用heatbugObserverSwarm的builldObjects方法 调用heatbugObserverSwarm的builldActions方法 调用heatbugObserverSwarm的activeIn方法
2010-4-7
Multilevel activation
In main.m:[topSwarm activateIn: nil];
-activateIn: (id) swarmContext [schedule activateIn: self] [subSwarm activateIn: self]; -activateIn: (id) swarmContext [schedule activateIn: self]
而后层层激活,开始仿真
2010-4-7
Integration of Swarm activities
2010-4-7
Heatbug模型设计
main
GUI
Model
Swarm kernel
Sub-Swarm
Operating System CPU
Model Swarm heatbugList World heat Space
Observer Swarm
Graph Object2dDisplay
ModelSwarm ObserverSwarm Swarm kernel
Raster Value2dDisplay Colormap
2010-4-7
Swarm平台安装及编译运行环境
在Windows下安装,安装完成后在Windows的“开 始\程序\Swarm \Terminal”即可进入 系统环境变量 path(C:\Swarm-2.1.1\bin) SWARMHOME(C:\Swarm-2.1.1) SWARMDIR(C:\Swarm-2.1.1) Makefile文件 make命令
2010-4-7
Swarm程序编译后形成的文件
.o文件-object文件 .exe文件
2010-4-7
2010-4-7
Heatbug模型运行演示及结果分析
每只热虫向着与自己的理想温度接近的某个方 向移动,它们所处位置的温度越接近理想温度,它 们的“不满意”程度越低。随着仿真时间的推进,这 些热虫聚集在几处,保持相对稳定的分布,并且它 们的平均不满意程度在不断降低。 体现了主体在环境中的适应性。
总结:Swarm程序建立的步骤
定义Agent; 定义和创建ModelSwarm;
定义ModelSwarm 创建 agent 创建动作序列表
定义和创建ObserverSwarm;
定义ObserverSwarm 创建object(graphs, probes) 创建动作序列表(GUI events)
编写mian方法
2010-4-7
总结:Swarm程序建立的步骤
Swarm模型运行机制 (程序视图)
供应链实训报告 实训专业:物流管理 实训班级:物流1011 实训地点:校内(教室、实训中心),校外(各物流企业) 指导老师:周慧 实训目的: 在学期末,为了更好的让我们了解社会物流企业的运营,故组织实训。通过实训,在加深我们对物流管理专业课程综合知识理解的同时具备分析问题和解决的能力。树立全局观念,着重培养我们的物流资料收集、分析、处理和集成能力,计划、执行及沟通能力。强化我们对物流各岗位职业技能的了解,进一步提高社会物流运营方案的设计和营销策划能力。实训内容: 1.在电脑上面操作相关的操作流程; 2.进入实训中心去切身操作;3去苏果等物流配送中心区参观学习 具体操作: 全班同学随机组合成十个小组,每组选出一位组长,由组长分配实训任务分工合作,最终整合在一起,完成一份完整的实训调研报告。(通过走访调查多个物流企业进行资料的收集,然后通过对资料的分析和处理,最终完成实训任务。) 实训感想: 通过这次实训的实际操作,使得我对整个社会物流有了更加深入的了解,同时也对物流相关性的业务流程有了一定的了解,它把我们日常学习的与专业有关的知识紧密的接合了起来,将我们所学到的专业知识和具体实践相结合,以提高我们的专业综合素质和能力,让我们对物流公司的运营状况有一个整体的了解,对中国物流行业的发展状况有一个比较全面的认识,增强我们对所学专业的认识,提高学习专业知识的兴趣,真正理解并吸收课堂中所学到的知识,为将来走上工作岗位打下良好基础。并且在自我总结过程中也学会了如何运用自己的语言,文字和图形相结合的能力来描述这次实训调研的成果,同时也锻炼了自己良好的组织和沟通能力。可以说在这次实训中,另我受益匪浅! 通过这段时间的走访调研,使我对我国的物流行业现状有一定的了解。中国物流业大多是由运输、仓储业转变而来的,各方面的设施设备都还不够完善,管理有的还保留原有的管
实验三 采样控制系统的数字仿真 一、实验目的 1. 熟悉采样控制系统的仿真方式; 2. 掌握采样控制系统数字仿真的程序实现。 二、实验内容 某工业系统的开环传递函数为 10()(5)G s s s = +,要求用数字控制器D(z)来改善系统的性能,使得相角裕度大于45o ,调节时间小于1s(2%准则)。 1. 绘制碾磨控制系统开环根轨迹图、Bode 图和奈奎斯特图,并判断稳定性; sisotool(G) //点击“Analysis ”下的“Closed-Loop Bode ”,出现LTI Viewer for SISO Design tool margin(G) //点击图标“Data Cursor ”,点击交叉点,出现相关参数。 2. 当控制器为()()() c K s a G s s b +=+,试设计一个能满足要求的控制器(要求用根轨迹法和频率响应法进行设计); 调节前: Gs=tf(10,[1 5 0]); Close_S=feedback(Gs,1); Step(Close_S,'b'); hold on 设计前截止频率为1.88rad/s,相角裕度为69.5°(第一问中) (1)进行根轨迹校正:
1,2=70=0.84.42.55/.25/5 3.75 s n n n n arctg t w rad s w rad s w p w jw j γγξξξ====-±=-±取度 由,求得=5,取=6要求的主导极点为 要使得根轨迹向左转,要加入零点。考虑到校正装置的物理可实现性,加入超前校正装 置。 111111111a ()b (a) ()(2)(b) ,a 2b 1804050c g o o o o o o c s G s s K s G s s s s p p p p p p p p p ?+= ++=++∠∠∠∠=-∠∠∠∠==K () () 开环传递函数为为了使得根轨迹通过根据相角条件 (-)-(-0)-(-)-(-)求得 (-0)=140,(-2)=90(-a )-(-b )超前装置提供的超前相角为 a=6.512,b=11.499(a 表示零点,b 表示极点) 111111115 3.7516.51210+511.499 0+511.499 1006.512=10 g g p j p K p p p p p p K p K =-++=++++=≈+根据根轨迹的幅值条件 系统的开环增益为 333 6.512()11.499 6.5126.499 c c c s G s s z p p z p += +==-10() 所以() 加校正装置后,除要求的主导极点,还有一个闭环零点和一个非主导极点。 根据(-5+j3.75)+(-5-j3.75)+=0+(-5)+(-11.499)-第八法则 、对系统的影响,例如超调量可能会变大等,但闭环系统的性 能主要由复数极点确定。
物流系统仿真 期末作业 题目:Manufacturing System Planning and Scheduling 班级:物流工程131 学号:1311393003 1311393008 姓名:黎宇帆张力夫 日期:2015-09-19 成绩:
制造系统规划与调度 翻译 2.1引言 现代生产调度工具是非常强大的,提供了广阔的范围内调整工具的行为的真实过程要求的选项和参数。 然而,更多的选项的存在,它就在实践中找到的工具的最佳配置更加困难。 即专家们经常无法预测的多种可能性的影响。 测试甚至一小部分在现实中可能的配置,对实际生产过程的影响可能需要几个月的时间,可能会严重降低整体性能。 因此,这样的试验在实践中是不可行的。 优化的生产调度仿真模型比使用真正的过程更安全,更便宜,更快,更容易测试。为了在一个中等规模的制造公司充分使用先进的调度工具的优势,找到它的一个最佳的规则和参数的优化配置。 模块化仿真模型的整个业务的制造系统和生产过程中阳极氧化阶段是建立以测试不同的调度配置的影响。调度工具的配置测试和优化进行了离线使用的仿真模型。实际生产过程不受干扰,可以非常快速、低成本的找到最优配置。 2.2问题描述 位于英国的一个中型制造商,生产一系列的不同的小压铝零件和一系列大批量的其他面向消费者的产品。典型的应用包括香水的喷雾组件和哮喘患者的分配器。这是一个高度竞争的行业,成功取决于是否能实现高效率和低成本制造。所以生产调度是非常重要的。 在过去,该公司安装的软件工具可以支持生产过程中的各个区域调度。全面提高公司绩效,增加产量和减少产品的交货时间,他们计划建立自动电抗器的供应链规划服务器–总调度系统协调当地所有的业务和生产区。为了提供最好的解决方案,调度工具供应商,预优国际(https://www.doczj.com/doc/3a3127311.html,)决定使用模拟求解调度工具的优化配置。 问题是建立一个仿真工具,它将接受的到来客户订单和生产订单排序以满足这些需求。一个重要的地方是模型的生产过程本身,以确保它的主要阶段的最佳时刻加载。阳极氧化阶段是整个生产过程中特别重要的,因此,它必须是非常详细的模拟,以测试到整体订单的交货时间可以通过阳极氧化过程阶段优化减少到什么程度。 在这种情况下的研究主要目标是以下几个: (1)为了确定公司模型间的相关业务和生产过程和确定订单和交货时间, (2)在规划部门分析和优化业务流程,为了处理传入的需求和规划生产订单。 (3)测试的整体生产时间,提高灵敏度,特别是确定是否引入特定排序规则的生产订单将减少在阳极氧化处理阶段总的处理时间。
实验四:控制系统的时域分析 一,实验目的 1、使用MATLAB 分析系统的稳定性及稳态性能。 2、分析系统的暂态性能并会计算暂态性能指标。 二、实验内容 1、已知系统的闭环传递函数为:384 40014020200)(234++++=S S G S S S ,分析系统的稳定性,并求该系统的单位阶跃响应曲线。 >> num=[200]; >> den=[1 20 140 400 384]; >> [z,p]=tf2zp(num ,den); >> ii=find(real(p)>0);n1=length(ii); >> if(n1>0) disp('The Unstable Poles are:'); disp(p(ii)); else disp('System is Stable');end System is Stable >>step(num,den) 2、已知离散系统5.08.06.1)(22+--=Z Z Z Z Z φ,求该系统的单位阶跃响应曲线。 >> num=[1.6 -1 0]; >> den=[1 -0.8 0.5]; >> dstep(num,den);
3、控制系统的状态空间模型为: ?????? ????????.3.2.1x x x =??????????--17120100010??????????x x x 321+u ??????????100 []???? ??????=x x x y 321132,求该系统在[0,3]区间上的单位脉冲响应曲线。 >> A=[0 1 0;0 0 1;0 -12 -17];B=[0;0;1];C=[2 3 1];D=0; >> impulse(A,B,C,D) 4、已知控制系统模型为:u x x x x ??????+????????????--=????????? ?10961021.2. 1,[]??????=x x y 2111,求系统在y=sint 时的响应。 >> [u,t]=gensig('sin(t)',2*pi); >> A=[0 1;-6 -9];B=[0;1];C=[1 1];D=0;
一曲柄滑块机构运动学仿真 1、设计任务描述 通过分析求解曲柄滑块机构动力学方程,编写matlab程序并建立Simulink 模型,由已知的连杆长度和曲柄输入角速度或角加速度求解滑块位移与时间的关系,滑块速度和时间的关系,连杆转角和时间的关系以及滑块位移和滑块速度与加速度之间的关系,从而实现运动学仿真目的。 2、系统结构简图与矢量模型 下图所示是只有一个自由度的曲柄滑块机构,连杆与长度已知。 图2-1 曲柄滑块机构简图 设每一连杆(包括固定杆件)均由一位移矢量表示,下图给出了该机构各个杆件之间的矢量关系 图2-2 曲柄滑块机构的矢量环
3.匀角速度输入时系统仿真 3.1 系统动力学方程 系统为匀角速度输入的时候,其输入为输出为;。 (1) 曲柄滑块机构闭环位移矢量方程为: (2)曲柄滑块机构的位置方程 (3)曲柄滑块机构的运动学方程 通过对位置方程进行求导,可得 由于系统的输出是与,为了便于建立A*x=B形式的矩阵,使x=[], 将运动学方程两边进行整理,得到 将上述方程的v1与w3提取出来,即可建立运动学方程的矩阵形式 3.2 M函数编写与Simulink仿真模型建立 3.2.1 滑块速度与时间的变化情况以及滑块位移与时间的变化情况 仿真的基本思路:已知输入w2与,由运动学方程求出w3和v1,再通过积分,即可求出与r1。 (1)编写Matlab函数求解运动学方程 将该机构的运动学方程的矩阵形式用M函数compv(u)来表示。 设r2=15mm,r3=55mm,r1(0)=70mm,。 其中各个零时刻的初始值可以在Simulink模型的积分器初始值里设置
M函数如下: function[x]=compv(u) %u(1)=w2 %u(2)=sita2 %u(3)=sita3 r2=15; r3=55; a=[r3*sin(u(3)) 1;-r3*cos(u(3)) 0]; b=[-r2*u(1)*sin(u(2));r2*u(1)*cos(u(2))]; x=inv(a)*b; (2)建立Simulink模型 M函数创建完毕后,根据之前的运动学方程建立Simulink模型,如下图: 图3-1 Simulink模型 同时不要忘记设置r1初始值70,如下图: 图3-2 r1初始值设置
广东财经大学华商学院实验报告 实验项目名称ERP供应链系统课程名称ERP软件(供应链系统) 成绩评定 实验类型:验证型□综合型 设计型□实验日期2016.2—2016.4 指导教师周敏仪学生姓名学号专业班级 一、实验项目训练方案
注意:凭证审核“morningstar”完成编辑→成批审核凭证过账有“administrator”完成编辑→全部过账 3、期末处理
(2)、生成凭证→凭证审核→凭证过账 生成凭证:财务会计→固定资产管理→凭证管理→卡片凭证管理(3)、期末处理:结转损益
(以前结转损益的图不见了,期末检查发现已经过了) 四、报表系统 1、生成报表流程 选择报表模板→报表另存为(路径)→视图(显示数据)→数据(报表重算) 2、资产负债表 选择“财务会计”→“报表”→“新企业会计准则”→“新企业会计准则资产负债表”→点击“另存为”→选取路径下报表下面的“新企业会计准则”,并命名为“第一季度资产负债表”→选择“视图”下面的“显示数据”→选择“数据”下面的“报表重算”→完成
3、现金流量表 选择“财务会计”→“现金流量表”→“T型账户”→左边借方:点击右键,选中“按现金科目展开”→点击“按下级科目展开”→点击“现金项目”→提示点击“是”→点击右“浏览”→选“筹资活动下面的现金流入”→选02“取得借款收入的现金”→完成 右边贷方:点击右键,选中“按现金科目展开“→点击”按“下级科目展开”→右击“固定资产”→点击“现金项目”→提示点击“是”→点击“浏览”→选“投资下面的现金流出” 右击“制造费用”→点击“现金项目”→提示点击“是”→点击“浏览”→选“经营下面的现金流出” 右击“销售费用”→点击“现金项目”→提示点击“是”→点击“浏览”→选“经营下面的现金流出” 右击“管理费用”→点击“现金项目”→提示点击“是”→点击“浏览”→选“经营下面的现金流出” 右击“财务费用”→点击“现金项目”→提示点击“是”→点击“浏览”→选“筹
《物流与供应链管理》 实验名称:系统管理 实验目的:了解用友ERP-U8管理软件的系统管理基本操作 实验内容:1.增加操作员;2.建立核算单位帐套;3.对操作员进行授权;4.启用供应链及其相关子系统;5.帐套备份 1.建立部门档案和职员档案、建立供应商分类和供应商档案、建立客户分类和客户档案。 (1)在“企业门户”中,单击“基础信息”,双击“基础档案”︳“部门档案”,打开“部门档案”窗口,按实验资料输入部门信息 (2)建立职员档案。在“企业门户”中,单击“基础信息”,双击“基础档案”︳“职员档案”,打开“职员档案”窗口,按资料录入职员信息。
(3)建立供应商分类和供应商档案。 在“企业门户”中,双击“基础信息”︳“基础档案”︳“供应商分类”,进入“供应商分类”窗口,按实验资料录入供应商分类信息。 在“企业门户”中,单击“基础信息”,双击“基础档案”︳“供应商档案”,打开“供应商档案”窗口。 按实验资料输入供应商信息。
(4)建立客户分类和客户档案。 在“企业门户”中,双击“基础信息”︳“基础档案”︳“客户分类”,进入“客户分类”窗口,按实验资料输入客户分类信息。如图 在“企业门户”中,单击“基础信息”,双击“基础档案”︳“客户档案”,打开“客户档案”窗口。窗口分为左右两部分,左窗口显示已经设置的客户分类,单击鼠标选中某以客户分类,右窗口中显示该分类所有客户的列表。 单击“增加”按钮,打开“增加客户档案”窗口。窗口中包括四个页签,即“基本”,“联系”,“信用”,“其他”。对客户不同的属性分别分类。
按实验资料输入客户信息。 2.设置付款条件。 在“企业门户”中,单击“基础信息”,双击“基础档案”︳“付款条件”,进入“付款条件”窗口。按实验资料输入全部付款条件。 3.建立存货分类、计量单位和存货档案。 (1)存货分类。在“企业门户”中,单击“基础信息”,双击“基础档案”︳“存货分类”,打开“存货分类”窗口。按实验资料输入存货分类信息。
哈尔滨理工大学实验报告 控制系统仿真 专业:自动化12-1 学号:1230130101 姓名:
一.分析系统性能 课程名称控制系统仿真实验名称分析系统性能时间8.29 地点3# 姓名蔡庆刚学号1230130101 班级自动化12-1 一.实验目的及内容: 1. 熟悉MATLAB软件的操作过程; 2. 熟悉闭环系统稳定性的判断方法; 3. 熟悉闭环系统阶跃响应性能指标的求取。 二.实验用设备仪器及材料: PC, Matlab 软件平台 三、实验步骤 1. 编写MATLAB程序代码; 2. 在MATLAT中输入程序代码,运行程序; 3.分析结果。 四.实验结果分析: 1.程序截图
得到阶跃响应曲线 得到响应指标截图如下
2.求取零极点程序截图 得到零极点分布图 3.分析系统稳定性 根据稳定的充分必要条件判别线性系统的稳定性最简单的方法是求出系统所有极点,并观察是否含有实部大于0的极点,如果有系统不稳定。有零极点分布图可知系统稳定。
二.单容过程的阶跃响应 一、实验目的 1. 熟悉MATLAB软件的操作过程 2. 了解自衡单容过程的阶跃响应过程 3. 得出自衡单容过程的单位阶跃响应曲线 二、实验内容 已知两个单容过程的模型分别为 1 () 0.5 G s s =和5 1 () 51 s G s e s - = + ,试在 Simulink中建立模型,并求单位阶跃响应曲线。 三、实验步骤 1. 在Simulink中建立模型,得出实验原理图。 2. 运行模型后,双击Scope,得到的单位阶跃响应曲线。 四、实验结果 1.建立系统Simulink仿真模型图,其仿真模型为
《生产系统建模与仿真》教学大纲 (理论课程) 开课系(部):工程学院课程编号:010396 课程类型:专业课总学时:48 学分:3 适用专业:工业工程开课学期:2014-2015学年第一学期 先修课程:概率论与数理统计、C语言程序设计、系统工程导论 一、课程简述 《生产系统建模与仿真》是面向工程实际的应用型课程,是工业工程系的主导课程之一。学生通过本课程的学习能够初步运用仿真技术来发现生产系统中的关键问题,并通过改进措施的实现,提高生产能力和生产效率。 本课程具有较强的理论性,同时具有较强的实践性和应用性,能够有效增强学生的系统仿真理论基础,提高学生对系统仿真、分析工作的适应性,培养其开发创新能力。 本课程的教学目标是培养学生的设计能力、创新能力和工程意识。课程以制造型生产企业为核心,通过理论教学和实践环节相结合,阐述了离散事件系统建模与仿真技术在生产企业分析中的基本原理和方法。其容涉及计算机仿真技术在生产系统分析中的作用和原理、仿真软件的介绍,重点介绍排队系统、库存系统、加工系统以及输入、输出数据分析。本课程的目的是要求学生通过学习、课堂教育和上机训练,能了解如何运用计算机仿真技术模拟生产系统的布置和调度管理;并熟悉和掌握计算机仿真软件的基本操作和能够实现的功能;使学生了解计算机仿真的基本步骤。 二、课程要求 (一)教学方法 1、启发式课堂讨论 针对关键知识点、典型题和难题,通过教师提问,鼓励学生回答问题或请到讲台前做题,并请其他学生评判或提出不同的答案或不同的解决方法。目的是加强学生自主学习的能力和判断能力,培养主动思考的习惯,启发学生的探索精神。 2、重视在教学中加强知识演进的逻辑规律的讲解 提高学生的逻辑思维能力,培养学生分析问题、解决问题的能力。 3、加强计算机辅助设计、分析 将Flexsim仿真软件引入教学中。应用计算机辅助设计、分析,能方便的改变系统
FLEXSIM软件在生产物流系统仿真实验报告 专业:学号:姓名: 1.FLEXSIM软件简介 Flexsim是一个强有力的分析工具,可帮助工程师和设计人员在系统设计和运作中做出智能决策。采用Flexsim,可以建立一个真实系统的3D计算机模型,然后用比在真实系统上更短的时间或者更低的成本来研究系统。 Flexsim是一个通用工具,已被用来对若干不同行业中的不同系统进行建模。Flexsim已被大小不同的企业成功地运用。使用Flexsim可解决的3个基本问题 1)服务问题 - 要求以最高满意度和最低可能成本来处理用户及其需求。 2)制造问题 - 要求以最低可能成本在适当的时间制造适当产品。 3)物流问题 - 要求以最低可能成本在适当的时间,适当的地点,获得适当的产品。 2.实验内容及目的 在这一个实验中,我们将研究三种产品离开一个生产线进行检验的过程。有三种不同类型的临时实体将按照正态分布间隔到达。临时实体的类型在类型1、2、3三个类型之间均匀分布。当临时实体到达时,它们将进入暂存区并等待检验。有三个检验台用来检验。一个用于检验类型1,另一个检验类型2,第三个检验类型3。检验后的临时实体放到输送机上。在输送机终端再被送到吸收器中,从而退出模型。图1-1是流程的框图。 本实验的目的是学习以下内容:
?如何建立一个简单布局 ?如何连接端口来安排临时实体的路径 ?如何在Flexsim实体中输入数据和细节 ?如何编译模型 ?如何操纵动画演示 ?如何查看每个Flexsim实体的简单统计数据 3.实验过程 为了检验Flexsim软件安装是否正确,在计算机桌面上双击Flexsim3.0图标打开应用程序。软件装载后,将看到Flexsim菜单和工具按钮、库、以及正投影视图的视窗。 步骤1:从库里拖出所有实体拖到正投影视图视窗中,如图1-3所示: 图1-3 完成后,将看到这样的一个模型。模型中有1个发生器、1个暂存区、3个处理 器、3个输送机和1个吸收器。 步骤2:连接端口 下一步是根据临时实体的路径连接端口。连接过程是:按住“A” 键,然后用鼠标左键点击发生器并拖曳到暂存区,再释放鼠标键。拖曳时你将看到一条黄线,
供应链管理实训心得体会3篇 供应链管理出现于二十世纪八十年代,因其在压缩库存、降低成本,改善顾客服务等方面所开辟的广阔空间倍受注目,在发达国家迅速兴起。下面是供应链管理实训心得体会,希望大家喜欢。 篇一:供应链管理实训心得体会 本次实训,旨在加深我们对物流管理专业课程综合知识理解的同时具备分析问题和解决的能力。树立全局观念,注重培养我们的物流资料收集、分析、处理和集成能力,计划及执行。强化我们对物流各岗位职业技能的了解,进一步提高制造物流运营方案的设计能力。本次实训内容主要是围绕着供应链管理。三个星期的实训中,我们根据系统软件,分别扮演供应商,制造商,零售商,物流公司,模仿真实的公司运作,通过实践操作,了解物流在实际工作中所遇到的困难。供应链管理是一种集成的管理思想和方法,它执行供应链中从供应商到最终用户的物流的计划和控制等职能。从单一的企业角度来看,是指企业通过改善上、下游供应链关系,整合和优化供应链中的信息流、物流、资金流,以获得企业的竞争优势。 我们主要是按照拉式的供应链方式操作,从零售商下订单,到制造商生产需要原材料在进行采购,在从上游往下游流动的这么一个过程。先是从零售商下订单,然后制造商接受订单,并按照订单制作出供货计划。根据供货计划,制作出MDS主需求计划、MPS 主生产计划以及MRP物料需求计算,并发出需求通知。物流公司接收到物料需求通知,制作采购计划,生成采购订单发送给供应商。供应商按订单接收后,进行订单备货,并发送给物流公司。物流公司收到物料后,按照配送指令,制作配送计划,将原材料配送给制造商。制造商进行收料后,开始生产,并进行检验,将成品发送至物流公司。物流公司收到成品后,按照配送指令,制作配送计划,配送给零售商。零售商收到成品后,就可以往市场进行销售。整个供应链流程就结束。在供应链系统中,物流公司充当的是第三方物流公司角色,零售商、制造商、供应商都是将配送业务外包由物流公司完成。 我在制造商、供应商、零售商、物流公司中扮演了具体的角色,体会到了供应链上各个节点企业是息息相关的,一个环节的运行需要相应环节的回应,否则寸步难行。例如在做物料齐套时,配套的材料必须严格仔细清点数量,否则无法进行。
实验一 MATLAB 及仿真实验(控制系统的时域分析) 一、实验目的 学习利用MATLAB 进行控制系统时域分析,包括典型响应、判断系统稳定性和分析系统的动态特性; 二、预习要点 1、 系统的典型响应有哪些 2、 如何判断系统稳定性 3、 系统的动态性能指标有哪些 三、实验方法 (一) 四种典型响应 1、 阶跃响应: 阶跃响应常用格式: 1、)(sys step ;其中sys 可以为连续系统,也可为离散系统。 2、),(Tn sys step ;表示时间范围0---Tn 。 3、),(T sys step ;表示时间范围向量T 指定。 4、),(T sys step Y =;可详细了解某段时间的输入、输出情况。 2、 脉冲响应: 脉冲函数在数学上的精确定义:0 ,0)(1)(0 ?==?∞ t x f dx x f 其拉氏变换为: ) ()()()(1 )(s G s f s G s Y s f === 所以脉冲响应即为传函的反拉氏变换。 脉冲响应函数常用格式: ① )(sys impulse ; ② ); ,(); ,(T sys impulse Tn sys impulse ③ ),(T sys impulse Y = (二) 分析系统稳定性 有以下三种方法: 1、 利用pzmap 绘制连续系统的零极点图; 2、 利用tf2zp 求出系统零极点; 3、 利用roots 求分母多项式的根来确定系统的极点 (三) 系统的动态特性分析 Matlab 提供了求取连续系统的单位阶跃响应函数step 、单位脉冲响应函数impulse 、零输入响应函数initial 以及任意输入下的仿真函数lsim.
合肥工业大学 实验报告 课程名称:物流系统建模与仿真 实验名称:配送中心系统仿真设计 姓名:fly 学号: 专业: 指导老师: 实验地点: 二○一二年二月十二日
一、实验目的: 1)了解供应链仿真的设计。 2)熟悉动态表格的设计。 3)了解Conveyor作为生产缓存的方法。 4)了解拉动式系统的设计。 5)研究不同配送策略的利润情况。 二、实验环境 电子商务实验室,计算机、Witness 2004 Educational Version 仿真软件 三、实验内容与步骤: 1、元素定义(Define) 本系统的元素定义如表1-1所示。
元素定义后的witness页面截图如图1-1: 图1-1 元素定义后的witness页面 2、元素可视化(Display)设置 各个实体元素的显示特征定义设置如图1-2所示: 图1-2 各个实体元素的显示特征 1)Part Buffer元素可视化的设置 在元素选择窗口选择P1元素,鼠标右键点击Display出现如图3所示对话框,设置它的Text、Icon和Style属性项。
图1-3 Display对话框 2)Buffer元素可视化的设置 选择Zhongxin元素,设置它们的Text、Icon、Part queue和Rectangle属性项,分别如图1-4、图1-5、图1-6、图1-2所示。 图l-4 Display Text对话框图1-5 Icon对话框 图1-6 Display Part Queue对话框图1-7 Text对话框 3)Machine元素可视化的设置 在元素选择窗口选择Factory1元素,鼠标右键点击Display出现如图11-1所示对话框,设置它的Text、Icon(机器图标)、Icon(可随状态改变颜色的图标),Part Queue。如图1-7、图1-8、图1-9、图1-2所示。
告 实验课程名称:供应链管理 实验地点:一汽大众集团 2016 年 11 月至 2016 年 11 月 18 专业 班级 学生姓名 学号 指导老师
实验报告 在一汽公司实习期间,我对企业内部实际运行过程、对各部门组织机构有了更直接的认识,并通过这次经历了解和认识不同类型的企业的组织生产过程,了解物流的管理过程。在生产企业的采购过程中对于供应链的管理是必不可少的,企业有效的供应链管理可以帮助企业实现思想目标,缩短现金的周转时间,降低企业面临的风险,实现盈利增长,提供可预测的收入。这次实习对我来说收获很大。 在国内汽车同行中,一汽—大众是首家采用第三方物流运作方式进行备件供应的厂家。第三方物流在国际上较为普遍。一汽—大众在学习德国大众先进经验的基础上,结合国内市场的特点和售后服务的多年经验,建立了这种备件供应模式。他还透露,中心库网络的设计规模是按照一汽—大众5年生产和销售规划设计的,可满足100万辆市场保有量的需求;各库均预留了现有规模50%以上的面积,以备未来发展、扩大之需;如果上述能力仍不能满足未来发展的需要,一汽—大众将以现有中心库250公里为半径建立其它中转库。 一汽大众对生产计划、质量控制、新品发布、产品认可包括新项目的确定都非常严谨。质量控制和管理是全程的,产品验收的过程控制十分苛刻。 为打造强大的供应链,首先整车厂继提前一年突破年产销百万辆以后,为继续提高产销,一汽大众正在构筑八大体系能力,其中就包括配套体系能力,在其他能力的支承下,一汽大众拉着零部件一起攻关克难。第一、制定清晰的战略。第二、落实具体的打法:一汽大众着力提高供应商的五大能力,包括质量控制能力、成本控制能力、供货保障能力、可持续发展能力、同步开发能力。第三、进行监督管理:针对“五大能力“,该公司采购部会同质保部、产品部、和物流部门一起对供应商进行评审。同时一汽-大众给每家供应商都建立一个数据库,输入供应商的能力和缺欠,进行绩效评价。第四、监管帮助结合。 除此而外,还有其他一系列的措施。有了强悍的零部件体系,为一汽-大众品质保障、产销攀升奠定了扎实的基础。
实验四 基于Simulink 控制系统仿真与综合设计 4.1实验目的 1)熟悉Simulink 的工作环境及其功能模块库; 2)掌握Simulink 的系统建模和仿真方法; 3)掌握Simulink 仿真数据的输出方法与数据处理; 4)掌握利用Simulink 进行控制系统的时域仿真分析与综合设计方法; 5)掌握利用 Simulink 对控制系统的时域与频域性能指标分析方法。 4.2实验内容与要求 4.2.1 实验内容 图4.1为单位负反馈系统。分别求出当输入信号为阶跃函数信号)(1)(t t r =、斜坡函数信号t t r =)(和抛物线函数信号2/)(2t t r =时,系统输出响应)(t y 及误差信号)(t e 曲线。若要求系统动态性能指标满足如下条件:a) 动态过程响应时间s t s 5.2≤;b) 动态过程响应上升时间s t p 1≤;c) 系统最大超调量%10≤p σ。按图4.2所示系统设计PID 调节器参数。 图4.1 单位反馈控制系统框图
s 119.010+s 1 007.01+s + - )(t r ) (t y ) (t e PID 图4.2 综合设计控制系统框图 4.2.2 实验要求 1) 采用Simulink 系统建模与系统仿真方法,完成仿真实验; 2) 利用Simulink 中的Scope 模块观察仿真结果,并从中分析系统 时域性能指标(系统阶跃响应过渡过程时间,系统响应上升时间,系统响应振荡次数,系统最大超调量和系统稳态误差); 3) 利用Simulink 中Signal Constraint 模块对图4.2系统的PID 参 数进行综合设计,以确定其参数; 4) 对系统综合设计前后的主要性能指标进行对比分析,并给出PID 参数的改变对闭环系统性能指标的影响。 4.3确定仿真模型 在Simulink 仿真环境中,打开simulink 库,找出相应的单元部件模型,并拖至打开的模型窗口中,构造自己需要的仿真模型。如图所示:
新疆财经大学实验报告 课程名称:物流管理综合实验 实验项目名称:系统建模与仿真 学号: 2013104059 姓名:曾华艳 班级:物流管理11-1 指导教师:林秋平 2014年 6月 2日
新疆财经大学实验报告
《铁路局联通营业厅排队仿真分析实验报告》 一、实验目的 (一)通过对铁路局联通营业厅运作的观察,建立计算机仿真全过程,对营业厅运作进行数据采集、建模和仿真分析,为联通营业厅提出改进和优化方案的建议。 (二)通过这次实验活动,全面了解计算机仿真技术在物流领域、生产制造领域等离散事件系统中的应用,理解仿真技术如何辅助管理人员进行决策。 (三)通过分组合作的形式,提供一种系统仿真工作中常见的团队协作方式的实践体验,培养协调工作、共同完成任务的能力。 二、系统描述 人们进入联通营业厅,首先要通过取票系统拿到自己的号,先在等待区等待叫号系统报自己的号。一共有2个服务台,2个服务台同时工作,哪个服务台叫到几号,拿这个号码的人就去哪个服务台,叫号系统按顺序叫号,2个服务台叫号不会发生重复现象。我们组决定针对铁路局联通营业厅叫号排队办理业务的过程进行研究,因此我们采集了仿真模型相关数据。记录了每位顾客到达时间、等待时间和离开时间。将收集的数据整理,录入excel中,并计算出了顾客的到达时间间隔和被服务时间,再利用flexsim建立仿真模型进行仿真分析与优化。 三、小组分工 (一)本组成员 1.组长:曾华艳 2.组员:晁芙蓉、陈磊、阿尔孜姑丽、宗泽宁、张振恒 (二)小组分工 1.调查收集数据和模型优化:全体成员 2.数据录入:晁芙蓉、张振恒、阿尔孜姑丽 3.数据处理:宗泽宁、阿尔孜姑丽 4.仿真模型建立与分析:陈磊、曾华艳 5.实验报告:曾华艳、晁芙蓉、宗泽宁 6.PPT 制作:张振恒、陈磊
供应链管理实验报告 协作者:杨无过之国经学号: 指导教师: 实验原理: 1、供应链核心基础与流程架构 2、供应链管理中的采购流程与战略 3、供应链视角下的生产与库存 4、供应链管理基础与流程调节 实验环境: 供应链管理与优化软件 实验内容: 一:订单管理 在现代供应链中,客户向制造商下达订单,制造商接收客户的订单,往往还需要经过审核确认,优先级处理等操作后才能进入后续的操作流程。基于此,本系统把这一系列的操作融合为订单管理。本系统内,零售商在零售商平台录入好订单后,会把订单发送给制造商公司,制造商公司根据自身及零售商情况对零售商订单进行处理。 1.订单接收:接收客户发送来的订单。 2.供货计划:按照制造商自身产能及订单情况对订单生成供货计划,供货计划明细将用于系 统多处。 3.订单处理:根据客户选择订单,对该客户的订单进行处理,对客户信用额度进行相应算法扣 除。客户订单可单个处理也可批量处理。 4.订单跟踪:对制造商已接收的客户订单进行跟踪,跟踪主线为订单状态,跟踪时限为客户订 单产生到交易完成的整个过程;这让用户对订单的处理情况一目了然。 5.配送通知:将制造商处理好的客户订单相关信息(供货计划明细信息)发送给物流公司。 6.订单查询:查询客户订单信息。 7.产能查询:查询产能信息。 二:需求管理 需求管理主要就是根据客户订单、销售预测、独立需求计划、需求变更的总体情况对一段时间(本系统为四周)内的需求与生产做出预测及计划。、 制造商在处理完客户订单后,会结合自身产能及市场情况做出详细准确的需求计划。1、Mds主需求计划:根据客户订单、销售预测单、独立需求计划单、需求变更单的总体情况生成一段固定时间段内(本系统为四周)的需求计划,作为制定主生产计划的依据。 2.mps主生产计划:根据MDS主需求计划环节产生的主需求计划单为依据,结合制造商自身 产能,按产品做出详细的主生产计划 3.mrp主需求运算:主需求运算环节就是需求管理模块的核心,也就是整个制造商管理系统 的核心。它根据主生产计划、产品BOM表作MRP(Material Requirement Planning)运算。 4.需求通知:制造商完成MRP运算后,需要把物料的需求明细发送给物流公司,以便物流公 司按照制造商的需求准备物料。需求通知即实现为制造商传递具体物料需求通知给物流公司。 三:生产管理 制造商做好需求计划,并知会物流公司其一段时间内的详细物料需求,物流公司将正确物料(Right Product)在正确的时间(Right Time),按照正确的数量(Right Quantity)、正确的质量(Right Quality)与正确的状态(Right Status)送到正确的地点( Right Place),制造商就可以开始生产了。
《MATLAB与控制系统仿真》 实验报告 班级: 学号: 姓名: 时间:2013 年 6 月
目录实验一MATLAB环境的熟悉与基本运算(一)实验二MATLAB环境的熟悉与基本运算(二)实验三MATLAB语言的程序设计 实验四MATLAB的图形绘制 实验五基于SIMULINK的系统仿真 实验六控制系统的频域与时域分析 实验七控制系统PID校正器设计法 实验八线性方程组求解及函数求极值
实验一MATLAB环境的熟悉与基本运算(一) 一、实验目的 1.熟悉MATLAB开发环境 2.掌握矩阵、变量、表达式的各种基本运算 二、实验基本原理 1.熟悉MATLAB环境: MATLAB桌面和命令窗口、命令历史窗口、帮助信息浏览器、工作空间浏览器、文件和搜索路径浏览器。 2.掌握MATLAB常用命令 表1 MATLAB常用命令 变量与运算符 3.1变量命名规则 3.2 MATLAB的各种常用运算符 表3 MATLAB关系运算符 表4 MATLAB逻辑运算符
| Or 逻辑或 ~ Not 逻辑非 Xor逻辑异或 符号功能说明示例符号功能说明示例 :1:1:4;1:2:11 . ;分隔行.. ,分隔列… ()% 注释 [] 构成向量、矩阵!调用操作系统命令 {} 构成单元数组= 用于赋值 的一维、二维数组的寻访 表6 子数组访问与赋值常用的相关指令格式 三、主要仪器设备及耗材 计算机 四.实验程序及结果 1、新建一个文件夹(自己的名字命名,在机器的最后一个盘符) 2、启动MATLAB,将该文件夹添加到MATLAB路径管理器中。 3、学习使用help命令。
供应链管理系统的设计与分析 一、实验时间: 实验地点: 二、实验目的 本开放性实验目的在于帮助我们了解物流规划的基本知识及方法,让我们了解学科发展的新技术,增强学生的动手能力,培养我们积极主动的实践能力。能够通过实际案例,完成一个供应链物流系统的规划,并利用实验室提供的物流系统规划仿真软件Witness软件建立仿真模型,通过系统仿真获得仿真结果,并根据模拟结果分析瓶颈所在,优化设计规划方案。 三、实验仪器 微机,witness物流仿真软件 四、实验原理 根据教师提供数据结合专业知识完成供应链系统的规划,合理配置设施设备。建立仿真模型,使用物流仿真软模拟,仿真运行,生成设施设备运行效率报表,并根据运行结果,调整设施设备,之后再次仿真运行,直到整体效率及各环节效率均达到一定要求后终止,确定最后的规划结果。 五、注意事项 1 仿真规划过程中需要一定的计算机和外语能力,但对于学生这方面能力有些缺乏,因此仿真系统的优化不做严格要求; 2 实验室中由于大部分学生第一次接触witness软件,对其不甚了解,在进行操作时应认真听老师讲解,并及时进行相关性的操作,以保证实验的顺利进行。 六、实验内容 1.基础知识讲解
(1)了解供应链管理的内容 供应链是围绕核心企业,从采购原材料开始,制成零部件以及产品,最后把产品交由消费者使用的连成一个整体的物流、信息流和资金流的链结构模式。它是一个范围更广的企业,可能包含所有加盟的节点企业如供应商、制造商、分销商、零售商,从原材料的供应开始,经过链中不同企业的制造加工、组装和分销等过程直到最终用户。 (2)Witness简介 Witness是由英国lanner公司推出的功能强大的仿真软件系统。它可以用于离散事件系统的仿真,同时又可以用于连续流体(如液压、化工、水力)系统的仿真。目前已被成功运用于国际3000多家知名企业的解决方案项目,如Airbus公司的机场设施布局优化、BAA公司的机场物流规划、BAE SYSTEMS电气公司的流程改善、Exxon化学公司的供应链物流系统规划、Ford汽车公司的工厂布局优化和发动机生产线优化、Trebor Bassett 公司的分销物流系统规划等。Lanner公司已经在包括澳大利亚、巴西、法国、德国、中国、意大利、日本、韩国、南非、美国、英国等25个国家和地区设立的代理,负责软件的推广和技术支持等工作。 (3)Witness元素介绍 元素:组成系统的物理单元。 并分为以下元素: 1)离散型元素:Part(零件)、machine(机器)、conveyor(传送带)、buffer(缓冲区) 2)连续型元素:Fluid、Pipe、Processor、Tank 3)运输逻辑元素:Network(网络)、Carriers(小车)、Section(线路)、Station(工作站) 4)逻辑元素:Attribute(属性)、Variable(变量)、Distribution(分布)、Function(函数)、File(文件)。 事件:是指引起系统状态变化的行为,系统的动态过程是靠事件来驱动的。 (4)Witness元素设计介绍及三步骤: 1)Define(元素定义) 2)Display(元素显示状态) 3)Detail(细节设置) 2.软件学习及仿真设计 通过现有计算机设备,学习物流仿真软件,建立仿真模型,演示相关软件,并自己动手操作。
控制系统仿真大作业 1、曲线拟合的Matlab实现和优化度检验 通过一个实际的例子,介绍最小二乘曲线拟合法的基本原理,对最小二乘曲线拟合法的Matlab实现方法进行研究,并给出曲线拟合Matlab实现的源程序。论述了Matlab软件在做曲线拟合时的用法,并进行曲线的拟合和相应的图像。 2、基于Matlab的液位串级控制系统 运用组态王和Matlab混合编程的方法设计了一个双容(两个水箱串联)液位串级在线控制系统,由组态王编制人机交互界面,用Matlab完成控制算法,二者通过DDE进行实时数据交换;采用串级控制策略,减小二次干扰的影响,验证其方法的有效性。 3、基于Matlab的变压器差动保护闭环仿真研究 应用Matlab建立了微机保护仿真系统,并对不同原理的变压器差动保护进行了仿真和比较.仿真系统采用积木式结构,根据微机保护的实现原理构建模块,实现保护的闭环仿真,对保护的动作过程进行分析. 4、基于MATLAB/SIMULINK的交流电机调速系统建模与仿真 根据直接转矩控制原理,利用MATLAB/SIMULINK软件构造了一个交流电机调速系统,该系统能够很好地模拟真实系统,实现高效的调速系统设计。仿真结果验证该方法的有效性。 5、基于MCGS和MATLAB的薄膜厚度控制系统仿真 以MCGS组态软件和MATLAB为平台,设计和仿真了一个薄膜厚度控制系统.MCGS完成硬件接口的设置、数据的实时采集、人机对话、以动画的方式显示控制系统的运行情况,MATLAB完成PID参数的自动整定,并利用动态数据交换(DDE)技术建立两者间的通讯.并分析其仿真结果。 6、Matlab在动态电路分析中的应用 用Matlab计算动态电路,可得到解析解和波形图.一阶电路先计算3要素,后合成解