收稿日期:2003212216
3国家自然科学基金资助(70122201) 教育部博士点基金资助(20020247036)
微观交通仿真模型系统参数校正研究
———以V ISSIM 的应用为例3
孙 剑 杨晓光
(同济大学 上海200092)
摘 要 微观交通仿真模型在交通系统管理、控制和优化中得到广泛应用,然而大多数仿
真模型参数均是针对外国的交通情况确定的,并不一定适合中国国情。文章提出了微观仿真模型参数校正流程,以上海市北京东路V ISSIM 仿真为实例,根据实际采集的数据,运用拉丁方格法进行实验设计,对V ISSIM 的仿真参数进行了校正,指出了微观仿真模型参数校正有待改进的方面。
关键词 交通仿真模型;参数校正;V ISSIM
Abstract :Microscopic simulation models have been widely used in traffic system management ,con 2trol and optimization ;however ,most of the simulation parameters are determined according to the situa 2tions in foreign countries and not always suitable for those in China.Firstly ,this paper proposes a proce 2dure for microscopic simulation model calibration.Then taking a V ISSIM simulation exam ple of Peking road in Shanghai as an example ,we have designed the experiment by using Latin Square algorithm and calibrated the simulation parameters by using the field data.Finally ,it points out the aspects that need improving.
K ey w ords :traffic simulation model ;parameter calibration ;V ISSIM
0 引 言
交通流仿真是再现交通流运行规律,对交通
系统进行管理、控制和优化的重要实验手段和工具。随着智能运输系统ITS 在我国的逐步实施,交通微观仿真软件在我国也得到了广泛的应用,如V ISSIM 、PARAM ICS 、CORSIM 、A IMSUN2等。交通微观仿真模型运用大量的独立参数来描述交通系统运行、交通流特性以及驾驶员行为等,参数的取值对仿真结果有很大的影响[1]。在仿真系统中,这些模型参数均有缺省值,同时也允许用户对这些参数进行修正。缺省值往往是根据模型开发国的情况确定的,并不一定适合我国的实际情况。所以,针对具体的仿真对象,必须对仿真参数进行标定。
另一方面,很多仿真参数难以通过实际调查获得,比如车辆启动损失时间、跟驰模型敏感性参数、车道变换时间、可插车间隙等,很多人因此怀疑仿真的科学性,认为它是“黑箱操作”。这些怀
疑主要是由于对仿真模型期望过高或者模型参数
没有得到正确的校正[2]。在本文中,首先建立了仿真参数的标定流程,然后以V ISSIM 仿真为例,以实际测得的车辆行驶时间为基准,运用拉丁方格法进行实验设计,对影响模拟结果的主要因素进行分析和标定,得出了令人满意的结果。
1 模型参数校正
1.1 模型参数校正概念
模型参数校正是根据实地交通运行状况,对仿真系统中各个独立参数进行调整,以使模型能准确表达具体仿真对象的过程。需要校正的仿真参数一般包括交通控制运行参数、交通流特性和驾驶员行为特性等。参数校正的目的是使仿真输出结果与实际测量的数据差异最小。1.2 模型参数校正流程
模型参数校正在国外已有研究,Benekohal 1991年首次提出参数校正的流程框架[3];Hellinga 于1998年提出的参数校正过程包括7个步骤[1]:
(1)定义研究目标;
(2)确定所需的实际数据;(3)选择影响因素水平;
(4)建立评价标准;
(5)仿真网络表示;(6)驾驶员路径行为;(7)模型输出结果评价。
上述步骤提供了宏观的参数校正指导原则,但没有具体的有针对性的仿真参数校正流程。
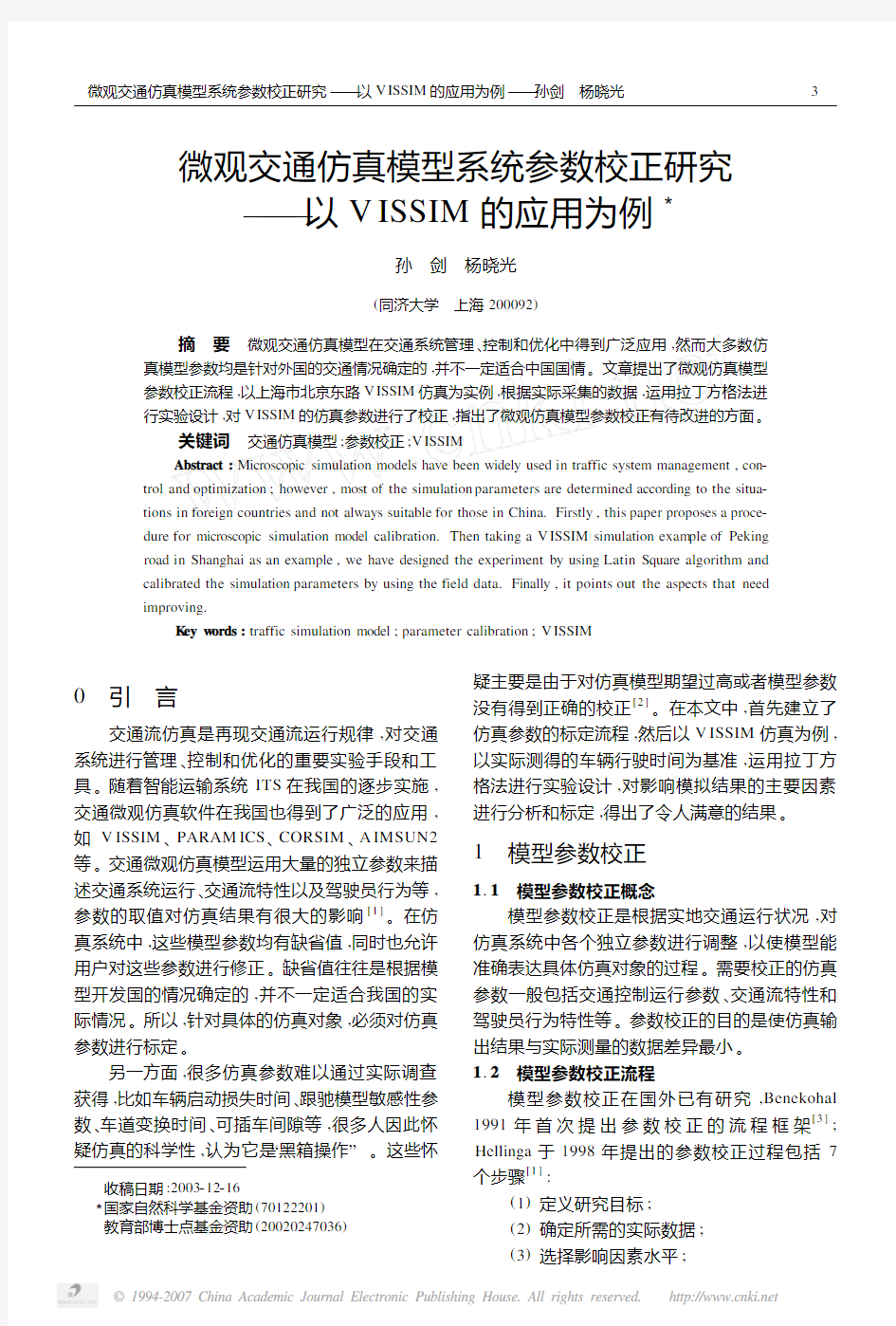
在本研究中,针对Hellinga 的校正过程的宏观性特点,笔者提出的参数校正流程更加详细,在应用上更具操作性。主要步骤如图1所示
。
图1 仿真模型参数校正流程
1)确定仿真模型参数校正的目标。一般而
言,目标是使仿真输出结果与实际测量的校核数
据差异最小或为零。
2)进行校核参数指标选择。模拟输入参数可分为可控参数和不可控参数,不可控参数一般不随模型的变化而变化,例如:道路条件、交通量、信号配时等;可控参数一般是模型中值可以改变的参数,例如:车道变换距离、最小车头时距、车辆消失前的等待时间等。校核参数必须是容易实际测量得到以及在仿真中可控。
3)实际数据采集。校核参数选定后,需对不可控参数以及校核参数进行实地测量,要注意区分高峰与平峰的数据采集。
4)针对不同的仿真对象,在不同的条件下,各个模型参数所占权重不尽相同,根据仿真精度,对仿真结果有较大影响的参数进行校正,同时确定这些参数的变化范围。
5)根据仿真需要,对待校正参数进行必要性评价。
6)仿真系统涉及多个可控参数,且每一个参
数都有不同的取值范围。若对每一种可能的情况都做相应的仿真实验,显然是时间所不允许的。例如,如果仿真系统有8个可控参数,每个参数取值分为5个级别,则需要做的仿真实验有58(390625)次。因此,科学的实验设计对于参数校正意义重大。我们选用拉丁方格法进行实验设计,可使实验次数从58降到54次。然后确定校核参数为因变量,可控的校正参数为自变量,建立模型[4,5]。
7)经过多次运行,确定模型参数。同时根据仿真结果和仿真画面确定最佳的可控参数取值。
8)根据仿真结果确定校正过程的中止。
2 参数校正应用
2.1 仿真区域
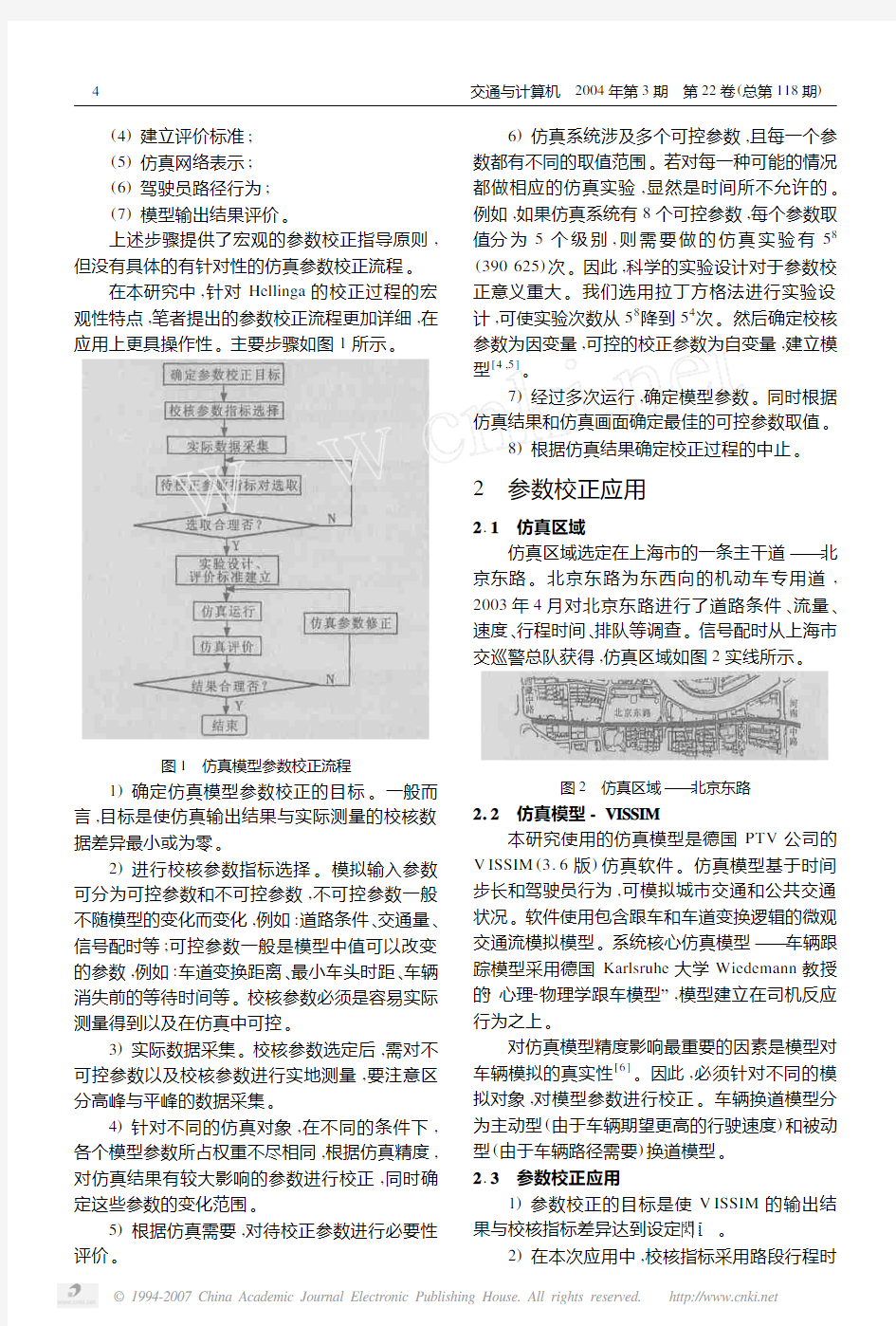
仿真区域选定在上海市的一条主干道———北京东路。北京东路为东西向的机动车专用道,2003年4月对北京东路进行了道路条件、流量、速度、行程时间、排队等调查。信号配时从上海市交巡警总队获得,仿真区域如图2实线所示
。
图2 仿真区域———北京东路
2.2 仿真模型-VISSIM
本研究使用的仿真模型是德国PTV 公司的V ISSIM (3.6版)仿真软件。仿真模型基于时间步长和驾驶员行为,可模拟城市交通和公共交通状况。软件使用包含跟车和车道变换逻辑的微观交通流模拟模型。系统核心仿真模型———车辆跟踪模型采用德国Karlsruhe 大学Wiedemann 教授的“心理2物理学跟车模型”,模型建立在司机反应行为之上。
对仿真模型精度影响最重要的因素是模型对车辆模拟的真实性[6]。因此,必须针对不同的模拟对象,对模型参数进行校正。车辆换道模型分为主动型(由于车辆期望更高的行驶速度)和被动型(由于车辆路径需要)换道模型。2.3 参数校正应用
1)参数校正的目标是使V ISSIM 的输出结果与校核指标差异达到设定 值。
2)在本次应用中,校核指标采用路段行程时
间,这主要基于两方面的考虑:一方面,行程时间容易通过多次跟车调查获得;另一方面V ISSIM 仿真输出文件,也可以输出路段行程时间。
3)根据V ISSIM的仿真需要,2003年5月15日对北京东路进行了交通调查,包括交通流量、交通流向、道路条件、交通组成、行程速度、行程时间等。信号配时从上海市交巡警总队获得。
4)对待校正参数的识别和定义是本仿真应用的关键。在V ISSIM中,涉及到的可控参数主要有紧急停车距离、车道变换距离、最小车头时距、平均停车距离、等待换道消失时间以及观察前方车辆数,各参数含义如下。
(1)紧急停车距离。紧急停车距离定义为一个被动型的换道车辆的最后可能位置,即对于必须换道的车辆(被动型车辆换道),由于流量太大,而无法完成换道,车辆将在此等待机会换道。由于仿真对象北京东路是一条主干道,车辆转弯概率较小,根据我们的仿真经验,紧急停车距离对仿真结果影响不大,故此参数取固定值5m。
(2)车道变换距离。车道变换距离定义为驾驶员为变换到理想车道(由于车辆路径需要,并不是超车需要)而开始试图变换车道的位置。它是与紧急停车距离相关联的一个参数,基于上述类似的原因,在本仿真中,我们取固定值200m。
(3)最小车头时距。最小车头时距是车辆进行车道变换所需要的与前方车辆的最小距离(发生在主动型车道变换以及被动型车道变换中), V ISSIM中缺省值是0.5m,显然,按照中国的国情,此值偏小。我们的取值范围定于0.5~4m。
(4)平均停车距离。平均停车距离定义为车辆停车时与前方车辆或者与停车线之间的距离,缺省值是2m,本次仿真中定义的范围为1~3m。
(5)等待换道消失时间。等待换道消失时间为车辆在停车线前等待换道直到消失的最大时间(发生在主动型车道变换中)。当车辆达到等待换道消失时间后,车辆就会从仿真网络中消失。模型缺省值是60s,我们取值定于45~120s。
(6)观察前方车辆数。观察前方车辆数定义为车辆在仿真中观测前方车辆的运行,然后相应的做出反映。缺省值是2辆。根据实际的经验,取值为1~4辆。
5)在本次仿真中,应用拉丁方格算法对4个待校正参数进行仿真实验,每个参数分4个水平,对于关键因素:最小车头时距和平均停车距离做全面实验,共需16次,然后根据4×4的拉丁方格,对安排因素:等待换道时间、观察前方车辆数做正交试验。参数分级如表1所列。
表1 各因素分级水平表
参 数
最小车头
时距/m
平均停车
距离/m
等待换道
时间/s
观察前方
车辆数/辆
水平1 0.5 1 45 1
水平2 1 1.5 60 2
水平3 2 2 80 3
水平4 4 3 120 4
6)在仿真中,随机数种子的不同对仿真结果也有较大的影响,因此分别取4个不同的随机数种子,这样最多共需64次试验,就可得出精度较高的模型参数。
7)根据试验,以行程时间为因变量,待校正参数为自变量,建立线性回归模型,值得注意的是,此模型只是针对特定的北京东路区域。建立的模型方程为
Y=1671292+11179X1+01122X2+
21469X3-01532X4
式中:Y为路段行程时间;X1为最小车头时距; X2为等待换道消失时间;X3为观察前方车辆数; X4为平均停车距离。
8)根据回归模型,以线性模型结果与实际测量的行程时间近似或相等为判定标准,得出几组参数组合。得出的初步参数组合如表2所列。
表2 待校正参数对表
参 数组合1组合2组合3组合4组合5最小车头
时距/m1110.51
等待换道
消失时间/s806012045120
观察前方
车辆数/辆21114
平均停车
距离/m1311 1.5
9)针对第8)步选出的几组参数组合,根据仿真画面,剔除明显与实际交通状况不符合的参数组合,如图3所示,参数组合5明显不符合实际的交通运行情况,应予以剔除。另外,考虑到实际行程时间是在一天中测得的,不确定是否能真正代表实际路段的行程时间。解决方案是对剩下的4组参数组合分别作不同随机数的模拟试验,随机数个数定为30。根据统计学理论,对仿真结果做T检验。这样可减少实际测量数据的片面性。
检验结果如表3所列。
10)综合考虑检验结果,最终选定参数组合1为适合于北京东路区域的模型参数组合
。
图3 仿真过程截屏图表3 校正参数组合T 检验表
参数组合平均值标准差
比实际值小的百分比/%
T 检验值/p
1170.64 3.718550.00.1972174.5610.6210.20.132
3167.31 4.95260.30.3094
168.90
3.92
32.1
0.937
2.4 仿真检验
应用V ISSIM 仿真软件,对模型未校正前、校
正后的仿真结果以及实际测得的各个路段的行程时间作一对比,结果如图4所示。
图4 仿真结果输出比较
由于我们的仿真对象北京东路的规模比较
小,使得实测数据与校正前的数据以及校正后的数据差别较小。但是在大规模的网络仿真中,如果不对参数进行校正,结果将会出现很大的仿真失真。从图4中可以看出,校正后的仿真输出结
果明显好于校正前的仿真结果。
3 结束语
本文研究了微观仿真模型参数的校正流程,并以上海市北京东路V ISSIM 仿真为实例,根据实际采集的数据,运用拉丁方格法进行实验设计,对V ISSIM 的仿真参数进行了校正,仿真试验表明结果令人满意。
仿真模型参数标定的难点在于参数组合的选择,在本研究中,应用拉丁方格法进行了实验设
计。进一步的工作是开展对仿真参数标定过程中
的优化方法研究,目前正在进行之中。
参考文献
1 Hesham Rakha ,Hellinga B ,Michel van Aerde ,William
Perez.Systematic verification ,validation and calibration of traffic simulation models.Washington ,D.C ,Trans 2portation Research Board Annual Meeting ,TRB ,1996.1~14
2 Hellinga B.Requirements for the validation and calibra 2tion of traffic simulation models.Proceedings of the Cana 2dian S ociety for Civil Engineering ,Annual Conference held in Halifax ,Nova Scotia.Volume I ,1998.211~222
3 Byungkyu ,Schneeberger J D.Microscopic simulation
model calibration and validation :A case study of V IS 2SIM for a coordinated actuated signal system.Washing 2ton ,D.C ,Trans portation Research Board Annual Meet 2ing ,TRB2003-531.1~18
4 梅长林,周家良1实用统计方法1北京:科学出版社,
2002.218~238
5 Benekohal R F.Procedure for validation of microsco pic
traffic flow simulation models.Washington , D.C ,Transportation
Research
Board
Annual
Meeting ,
TRB1991-001320.190~202
6 PTV Planug Transport Verkehr A G.V ISSIM Version 3.
6Manual.Innovative T rans portation C once pts ,2001.79~102
VISSIM,PARAMICS,TSIS仿真软件对比分析三大著名的仿真软件 (VISSIM/PARAMICS/TSIS)对比分析 VISSIM仿真系统 VISSIM是德国PTV公司开发的微观仿真软件,是一种微观的、以时间为参照、以交通行为模型为基础的仿真系统,主要用于城市和郊区交通的模拟仿真中。它采用的是一个离散的、随机的、以0(1s为时间步长的微观模型。车辆的纵向运动采用了基于规则的算法。不同驾驶员行为的模拟分为保守型和冒险型。VISSIM提供了图形化的界面,用2D和3D动画向用户直观显示车辆运动,运用动态交通分配进行路径选择。VISSIM可以模拟轨道和道路公共交通、自行车交通和行人交通,由仿真获得的交通特征数据可以评估不同的选择方案。它能够模拟许多城市内和非城市内的交通状况,特别适合模拟各种城市交通控制系统,主要应用有:(1)由车辆激发的信号控制的设计、检验、评价;(2)公交优先方案的通行能力分析和检验;(3)收费设施的分析;(4)匝道控制运营分析;(5)路径诱导和可变信息标志的影响分析;(6)路段、交叉口及整个交通网的通行能力和交通流分析;(7)评估不同的设计规划方案和交通组织方案;(8)评估环形交通;(9)评估收费系统和其他交通服务设施;(10)评估智能交通系统的效果(如路径选择系统);(11)大型公交车站的功能分析:(12)复杂交通设施各种运行方式的优化设计(如信号灯控制的路口和无信号灯控制的路口的组合和协 调);(13)信号灯控制程序的设计和优化:(14)设计公交优先系统;(15)2D和3D 模拟结果的动态演示等。 在VISSIM模型中,信号灯控制程序可以在定时控制或者感应式信号程序方式下进行模拟。在信号控制程序的模拟时,西门子、飞利浦、PTV、BASEL等公司的产品都可以与之兼容。VISSIM仿真系统中,对于交通流和信号控制之间有一个接
第四章微观交通仿真软件VISSIM使用介绍 第一节 VISSIM微观仿真软件介绍 1.VISSIM仿真系统基本原理 VISSIM是由德国PTV公司开发的微观交通流仿真系统。该系统是一个离散的、随机的、以十分之一秒为时间步长的微观仿真软件。车辆的纵向运动采用了德国Karlsruhe大学Wiedemann教授的“心理—生理跟车模型”;横向运动(车道变换)采用了基于规则(Rule-based)的算法。不同驾驶员行为的模拟分为保守型和冒险型。 VISSIM软件系统内部由交通仿真器和信号状态发生器两大程序组成,它们之间通过接口来交换检测器的呼叫和信号状态。"交通仿真器"是一个微观的交通流仿真模型,它包括跟车模型和车道变换模型。"信号状态发生器"是一个信号控制软件,它以仿真步长为基础不断地从交通仿真器中获取检测信息,决定下一仿真时刻的信号状态并将这信息传送给交通仿真器。 图4.1 VISSIM中交通仿真器和信号状态发生器 2.VISSIM仿真系统基本功能 VISSIM可以作为许多交通问题分析的有力工具,它能够分析在诸如车道特性、交通组成、交通信号灯等约束条件下交通运行情况,不仅能对交通基础设施实时运行情况进行交通模拟,而且还可以以文件的形式输出各种交通评价参数,如行程时间、排队长度等。因此,它是分析和评价交通基础设施建设中各种方案的交通适应性情况的重要工具。 以下是VISSIM的主要交通分析功能: 1、固定式信号灯配时方法的开发、评价及优化。 2、能对各种类型的信号控制进行模拟,例如:定时控制方法、车辆感应信号控制方法、SCA TS和SCOOT控制系统中的信号控制等。在VISSIM中,交通信号配时策略还可以
VISSIM交叉口仿真教程(新手版)适合:第一次接触者使用 概述:如今交通信息化已经成为当下交通工程发展的新方向,而vissim作为一种重要的交通仿真软件,已经越来越多的应用在交通仿真的各个方面。 交叉口的制作: 第一步:加入背景 图表1 选取编辑选项
图表2 如图读取背景图片 图表3 选取比例选项,之后在背景上选取对应的车道宽度 第二步:绘制路网:
使用最左边工具栏里的进行路网的绘制,按照车流前进的方向点死鼠标右键拉线,确定link的起终点,之后进行link参数的选择(包括车道等) 如此,将背景图中的所有道路一一覆盖 第三步:连接各个link 选取要连接的link点击在其上点击右键然后拉向要被连接的link,之后显示出参数界面(包括可以取的曲线点的数目、link里的不同车道等),之后就有了link之间的连接线
依此连接所有可行的link,为下一步输入车流打好基础。 第四步:加入交通量 使用最左边工具栏里的进行车流的放入,在link的远端起点(交叉口的进口道远端)选中该link后点击右键,得到下图所显示的车辆输入界面: 作为实验可以如图输入参数,表示该link编号为1,一个仿真周期输入车流量1111,车辆类型及种类选取了默认。 第五步:给出车辆运行的路径:
使用最左边工具栏里的进行路径的给出。首先左键选取起始的link,在其上点击右键,然后左键选取想要去的link,在其上点击右键,则可以得到图示的效果: 图中的红线和绿线即为点击右键的位置。如此,车辆可以向三个方向运行了。当然,必须之前连好的link之间才可以设置路径。 第六步:给出信号灯配时: 首先选取最上边菜单栏的信号控制中的编辑信号控制机选项,得到下图:
三大着名的仿真软件(VISSIM/PARAMICS/TSIS)对比分析 VISSIM仿真系统 VISSIM是德国PTV公司开发的微观仿真软件,是一种微观的、以时间为参照、以交通行为模型为基础的仿真系统,主要用于城市和郊区交通的模拟仿真中。它采用的是一个离散的、随机的、以0.1s为时间步长的微观模型。车辆的纵向运动采用了基于规则的算法。不同驾驶员行为的模拟分为保守型和冒险型。VISSIM提供了图形化的界面,用2D和3D动画向用户直观显示车辆运动,运用动态交通分配进行路径选择。VISSIM可以模拟轨道和道路公共交通、自行车交通和行人交通,由仿真获得的交通特征数据可以评估不同的选择方案。它能够模拟许多城市内和非城市内的交通状况,特别适合模拟各种城市交通控制系统,主要应用有:(1)由车辆激发的信号控制的设计、检验、评价;(2)公交优先方案的通行能力分析和检验;(3)收费设施的分析;(4)匝道控制运营分析;(5)路径诱导和可变信息标志的影响分析;(6)路段、交叉口及整个交通网的通行能力和交通流分析;(7)评估不同的设计规划方案和交通组织方案;(8)评估环形交通;(9)评估收费系统和其他交通服务设施;(10)评估智能交通系统的效果(如路径选择系统);(11)大型公交车站的功能分析:(12)复杂交通设施各种运行方式的优化设计(如信号灯控制的路口和无信号灯控制的路口的组合和协调);(13)信号灯控制程序的设计和优化:(14)设计公交优先系统;(15)2D和3D模拟结果的动态演示等。 在VISSIM模型中,信号灯控制程序可以在定时控制或者感应式信号程序方式下进行模拟。在信号控制程序的模拟时,西门子、飞利浦、PTV、BASEL
VISSIM交通仿真软件简介 VISSIM VISSIM是由德国PTV公司开发的微观交通仿真系统为模拟工具。 VISSIM 是一种微观、基于时间间隔和驾驶行为的仿真建模工具,用以建模和分析各种交通条件下(车道设置、交通构成、交通信号、公交站点等),城市交通和公共交通的运行状况,是评价交通工程设计和城市规划方案的有效工具。 VISSIM 由交通仿真器和信号状态产生器两部分组成,它们之间通过接口交换检测器数据和信号状态信息。VISSIM 既可以在线生成可视化的交通运行状况,也可以离线输出各种统计数据,如:行程时间、排队长度等。 自1992年进入市场以来,VISSIM 已经成为模拟软件的标准,其投入的深入研发力量和世界范围内的大批用户保证了VISSIM 在同类软件中处于领先地位。 公司简介 德国PTV集团最初成立于1979年,总部设在德国的卡尔斯鲁厄尔市(Karlsruhe)。经过20多年的发展,已经在美国、法国、瑞士、荷兰、比利时、澳大利亚、新加坡、阿联酋、中国等地设立了分公司。其软件和技术在世界上被广泛应用,截至到2005年6月,全球的用户达到1300个,其中欧洲用户达到700个,北美、南美用户达到350个,亚洲用户达到250个。截至到2006年3月,中国使用PTV Vision软件系列的用户超过了80个。 辟途威交通科技(上海)有限公司成立于2005年2月,是德国PTV集团在世界范围内投资的第20家独资子公司。该公司是PTV总部在中国成立的第一家子公司,旨在为中国的用户提供更加便捷、全面、本土化的技术支持以及培训等方面的服务,同时通过和用户进行项目合作,来支持用户掌握PTV公司提供的软件的使用。辟途威交通科技(上海)有限公司在中国的业务范围主要包括: 1 PTV 软件开发和销售 2 软件培训和技术支持 3 交通运输规划咨询 4 交通工程咨询 5 智能交通系统(ITS)咨询
摘要 阐述了微观交通仿真软件VISSIM的理论基础,基于其模型对海口市海甸岛甸昆路口进行的交通仿真。通过对海口市甸昆路口实际调查得到交通数据,分析其交叉路口的交通运行现状。利用VISSIM进行模拟仿真,通过分析仿真数据,评价交叉口的通行能力、行车延误、排队长度等道路交通指标。对改进和优化甸昆路交叉口的交通设计方案提出合理化建议,解决海口市甸昆路口中存在的不合理的城市道路交通规划设计。结果表明城市的道路交叉口通过模拟仿真能够优化其交通流诱导问题,有助于解决路口行车拥堵故障,提高交通出行服务水平。利用VISSIM交通仿真能够在实际中应用,有效地在复杂交通条件下解决城市道路交通运输的实际问题。这是实现城市智能交通系统自动化、数字化的重要研究新方法。 关键词:交通仿真;VISSIM;交叉口;交通流
Abstract The microscopic traffic simulation software VISSIM theoretical basis, based on the model in the Haidian Island, Haikou City Dian Kun intersection traffic simulation. Dian Kun intersection traffic conditions collected survey data, analysis of its intersection traffic operation status quo. VISSIM simulation, and analysis of simulation data, the evaluation of the intersection capacity, traffic delays, queue length and road traffic indicators. The traffic design improvements and optimization Dian Kun Road intersection to make reasonable suggestions to solve Dian Kun intersection unreasonable urban traffic planning and design. The results show that the city's road intersections by simulation to optimize traffic flow guidance, help to solve the intersection traffic congestion, improve traffic travel service levels. VISSIM traffic simulation in practical applications, effectively solve the practical problems of urban transport in the complex traffic conditions. This is a new method of urban intelligent transportation system automation, digitization important. Key words: traffic simulation; VISSIM; intersection; traffic flow
目录 引言 (1) 第一章 vissim交通仿真软件的简介 (2) 1.1 交通仿真的意义 (2) 1.2 vissim交通仿真软件的应用 (2) 第二章 vissim的具体操作功能介绍 (4) 2.1 vissim 布置路网与道路连接 (4) 2.2 车辆的输入 (7) 2.3 路径决策 (8) 2.4 信号灯及信号配时 (9) 2.5 减速区的设置 (12) 2.6 车辆优先设置 (13) 第三章 vissim仿真结果及数据分析 (16) 3.1 结果文件的输出 (16) 3.2 评价类型设置 (18) 3.2.1 行程时间 (18) 3.2.2 延误 (20) 3.2.3 数据采集点 (21) 3.2.4 排队计数器 (23) 3.2.5 车辆记录 (23) 3.2.6 路段评价 (24) 3.2.7 路网性能评价 (26) 3.3 仿真输出的数据及意义 (26) 3.3.1 行程时间 (26) 3.3.2 延误 (27) 3.3.3 数据检测记录 (28) 3.3.4 排队记录数据 (28) 第四章 vissim在小区中的具体应用 (30) 4.1 调查数据 (30) 4.2 小区路网构建步骤 (31) 4.3 现状仿真运行结果及分析 (37)
4.4 小区路网的改善 (39) 4.5结果的分析比较 (42) 第五章小结 (44) 谢辞 (46) 参考文献 (47)
引言 随着我国国民经济的发展, 城市化的步伐日益加快,城市道路越来越不满足交通需求量的增长。这就使得人们去对未来年交通量、通行能力加以规划预测,然而要做到这些这就必须对未来年建设项目进行交通影响评价。交通影响评价是建设项目建成后的交通影响分析的手段,评价建设项目对其周边路网的交通影响,并采取一定的措施,使影响达到最低,使整个路网的运行效率最优化。我国自1996 年上海首次引进交通影响评价以来,国内的专家及学者一直对其探讨,交通影响评价尚处于一个发展阶段。在交通影响评价中如何进行定量的评价是一个关键问题,本文在VISSIM系统下,根据延误指标,行程时间等参数进行评价,并以实例说明。
目录 一、立项背景 ........................................................................ - 1 - 二、Vissim简介 ................................................................... - 2 - 三具体工作 .......................................................................... - 3 - 3.1准备资料 .................................................................... - 3 - 3.2建模步骤 .................................................................... - 6 - 3.3.交通车辆属性定义.................................................. - 11 - 3.4交通构成 .................................................................. - 13 - 3.5路线选择与转向...................................................... - 15 - 3.6评价 .......................................................................... - 16 - 3.7、仿真 ....................................................................... - 30 - 四、评价结论 ...................................................................... - 31 -
三大著名的仿真软件 (VISSIM/PARAMICS/TSIS)对比分析 VISSIM仿真系统 VISSIM是德国PTV公司开发的微观仿真软件,是一种微观的、以时间为参照、以交通行为模型为基础的仿真系统,主要用于城市和郊区交通的模拟仿真中。它采用的是一个离散的、随机的、以0.1s为时间步长的微观模型。车辆的纵向运动采用了基于规则的算法。不同驾驶员行为的模拟分为保守型和冒险型。VISSIM提供了图形化的界面,用2D和3D 动画向用户直观显示车辆运动,运用动态交通分配进行路径选择。VISSIM可以模拟轨道和道路公共交通、自行车交通和行人交通,由仿真获得的交通特征数据可以评估不同的选择方案。它能够模拟许多城市内和非城市内的交通状况,特别适合模拟各种城市交通控制系统,主要应用有:(1)由车辆激发的信号控制的设计、检验、评价;(2)公交优先方案的通行能力分析和检验;(3)收费设施的分析;(4)匝道控制运营分析;(5)路径诱导和可变信息标志的影响分析;(6)路段、交叉口及整个交通网的通行能力和交通流分析;(7)评估不同的设计规划方案和交通组织方案;(8)评估环形交通;(9)评估收费系统和其他交通服务设施;(10)评估智能交通系统的效果(如路径选择系统);(11)大型公交车站的功能分析:(12)复杂交通设施各种运行方式的优化设计(如信号灯控制的路口和无信号灯控制的路口的组合和协调);(13)信号灯控制程序的设计和优化:(14)设计公交优先系统;(15)2D和3D模拟结果的动态演示等。 在VISSIM模型中,信号灯控制程序可以在定时控制或者感应式信号程序方式下进行模拟。在信号控制程序的模拟时,西门子、飞利浦、PTV、BASEL等公司的产品都可以与之兼容。VISSIM仿真系统中,对于交通流和信号控制之间有一个接口,通过这个接口可以在检测器数据和信号灯控制参数之间进行数据交换。仿真结果可以是视窗动态交通流演示,或者是最后输出多种重要交通参数的数据表格。VISSIM的交通流模型既可以模拟一条车道上的车队行驶,也可以模拟车流在车道组中的变
三大著名的仿真软件(VISSIM/PARAMICS/TSIS)对比分析VISSIM仿真系统 VISSIM是德国PTV公司开发的微观仿真软件,是一种微观的、以时间为参照、以交通行为模型为基础的仿真系统,主要用于城市和郊区交通的模拟仿真中。它采用的是一个离散的、随机的、以0.1s 为时间步长的微观模型。车辆的纵向运动采用了基于规则的算法。不同驾驶员行为的模拟分为保守型和冒险型。VISSIM提供了图形化的界面,用2D和3D动画向用户直观显示车辆运动,运用动态交通分配进行路径选择。VISSIM可以模拟轨道和道路公共交通、自行车交通和行人交通,由仿真获得的交通特征数据可以评估不同的选择方案。它能够模拟许多城市内和非城市内的交通状况,特别适合模拟各种城市交通控制系统,主要应用有:(1)由车辆激发的信号控制的设计、检验、评价;(2)公交优先方案的通行能力分析和检验;(3)收费设施的分析;(4)匝道控制运营分析;(5)路径诱导和可变信息标志的影响分析;(6)路段、交叉口及整个交通网的通行能力和交通流分析;(7)评估不同的设计规划方案和交通组织方案;(8)评估环形交通;(9)评估收费系统和其他交通服务设施;(10)评估智能交通系统的效果(如路径选择系统);(11)大型公交车站的功能分析:(12)复杂交通设施各种运行方式的优化设计(如信号灯控制的路口和无信号灯控制的路口的
组合和协调);(13)信号灯控制程序的设计和优化:(14)设计公交优先系统;(15)2D和3D模拟结果的动态演示等。 在VISSIM模型中,信号灯控制程序可以在定时控制或者感应式信号程序方式下进行模拟。在信号控制程序的模拟时,西门子、飞利浦、PTV、BASEL等公司的产品都可以与之兼容。VISSIM仿真系统中,对于交通流和信号控制之间有一个接口,通过这个接口可以在检测器数据和信号灯控制参数之间进行数据交换。仿真结果可以是视窗动态交通流演示,或者是最后输出多种重要交通参数的数据表格。VISSIM的交通流模型既可以模拟一条车道上的车队行驶,也可以模拟车流在车道组中的变换情况。利用这些交通特征数据可以按照交通服务水平标准确定交通运行状况,进行多种措施预期实施效果的比较。 PARAMICS仿真系统 英国的Quadstone公司开发的Paramics是表现最为出色的商业化交通仿真产品之一。Paramics从1992年开始开发至今,融合了欧美众多交通及计算机领域科研机构及专家的努力和智慧,具有细致的路网建模、灵活的信号及车辆控制、完善的路径诱导、丰富的编程接口、详尽的数据分析等特色。由于采用了并行计算技术,仿真的路网规模可达上百万个节点,4百多万个路段,3万多个小区。在ITS的研究中,Paramics有突出的表现,能仿真交通信号、匝道控制、检测器、可变信息板、车内信息显示装置,车内信息顾问,路径诱导等。
《交通仿真》实验报告 姓名:姚国俊 院系:交通运输工程学院 班级:交通工程10-02 学号:20106970 指导老师:丁恒 时间:2013年12月11日
目录 一.实验目的与要求02 二.实验报告书内容02 三.数据设计及相关准备02 1.道路几何尺寸数据02 2.信号配时数据03 3.交通流数据03 四.交通仿真实验步骤 1.导入底图04 2.显示背景图04 3.定义比例04 4.保存背景图片05 5.添加路段05 6.连接器06 7.定义交通属性07 8.画人行道及非机动车道11 9.减速与让行11 10.信号控制交叉口设置13 11.公交设置15 12.仿真17 13.评价 18 五、实验心得22 六、参考资料23
一、实验目的与要求 本实验作业要求学生完成一个典型平面信号交叉口的仿真建模工作,需要完成车道设计、信号配时和交通流量输入工作,并且可以通过动画演示,并进行指标评价。实验旨在使学生具备以下能力: 熟悉VISSIM软件操作界面; 掌握运用VISSIM软件创建与连接路段; 掌握运用VISSIM软件建立路径; 掌握VISSIM软件交叉口路段仿真参数设置; 掌握VISSIM软件公交的设置; 掌握运用VISSIM软件评价功能。 二、实验报告书内容 交叉口几何条件、信号配时和交通流数据描述; 案例的模拟结果,可以通过VISSIM输出文件中获得; 分析所模拟的信号交叉口存在的交通问题,提出改进措施并建立相应的仿真模型验证方案的技术可行性; 提出试验系统的不足之处和改进完善意见。 三、数据设计及相关准备 本实验针对实验课程的内容和VISSIM软件的数据要求,需要进行相关的数据设计和准备工作。数据设计和准备的内容主要包括以下三方面:道路几何尺寸、信号配时现状及交通流量数据。 1.道路几何尺寸数据: 图3-1
VISSIM交叉口仿真教程(新手版) 适合:第一次接触者使用 概述:如今交通信息化已经成为当下交通工程发展的新方向,而vissim作为一种重要的交通仿真软件,已经越来越多的应用在交通仿真的各个方面。 交叉口的制作: 第一步:加入背景 图表1 选取编辑选项 图表2 如图读取背景图片
图表3 选取比例选项,之后在背景上选取对应的车道宽度 第二步:绘制路网: 使用最左边工具栏里的进行路网的绘制,按照车流前进的方向点死鼠标右键拉线,确定link 的起终点,之后进行link参数的选择(包括车道等) 如此,将背景图中的所有道路一一覆盖 第三步:连接各个link 选取要连接的link点击在其上点击右键然后拉向要被连接的link,之后显示出参数界面(包括可
以取的曲线点的数目、link里的不同车道等),之后就有了link之间的连接线
依此连接所有可行的link,为下一步输入车流打好基础。 第四步:加入交通量 使用最左边工具栏里的进行车流的放入,在link的远端起点(交叉口的进口道远端)选中该link后点击右键,得到下图所显示的车辆输入界面: 作为实验可以如图输入参数,表示该link编号为1,一个仿真周期输入车流量1111,车辆类型及种类选取了默认。 第五步:给出车辆运行的路径: 使用最左边工具栏里的进行路径的给出。首先左键选取起始的link,在其上点击右键,然后左键选取想要去的link,在其上点击右键,则可以得到图示的效果:
图中的红线和绿线即为点击右键的位置。如此,车辆可以向三个方向运行了。当然,必须之前连好的link之间才可以设置路径。 第六步:给出信号灯配时: 首先选取最上边菜单栏的信号控制中的编辑信号控制机选项,得到下图: 新建新的信号配时方案之后,选取最简单的固定配时进行设置:首先点击编辑信号控制,在新的界面里根据要仿真的实际相位需求添加需要的信号灯组,然后添加新的信号配时方案;接着在信号灯组中选取红绿灯的形式,之后在信号配时方案中进行相位的设置,控制不同灯组出现
基于VISSIM平台的复杂立交桥交通环境仿真报告
————————————————————————————————作者:————————————————————————————————日期:
目录 一、立项背景 ............................................. 错误!未定义书签。 二、Vissim简介 ................................................................... - 2 - 三具体工作?- 3- 3.1准备资料?错误!未定义书签。 3.2建模步骤?错误!未定义书签。 3.3.交通车辆属性定义?错误!未定义书签。 3.4交通构成 .................................. 错误!未定义书签。 3.5路线选择与转向 ...................... 错误!未定义书签。 3.6评价?错误!未定义书签。 3.7、仿真 ....................................... 错误!未定义书签。 四、评价结论 ............................................. 错误!未定义书签。
基于VISSIM平台的复杂立交桥交通环境仿真报告 一、立项背景 随着中国经济的快速发展国家城镇化的建设逐渐加快,人民生活水平逐渐提高为满足出行的要求家用轿车的数量逐渐增加,许多大中型城市的道路已不能满足交通的需要,交通拥堵现象日益严重,尤其是在平面交叉口的位置常常造成较长的时间延误。为改善这一状况许多大中型城市的交通要道和高速公路上兴建了一大批立交桥,用空间隔离的方法消除道路平面交叉的冲突点,使两条交叉道路的车辆能够方便和快速的通过交叉口,减少平面交叉带来的交通延误。并且城市环线与高速公路网的联结也必须通过大型互通式立交进行分流和引导,保证交通的畅通。城市立交桥已成为现代化城市的重要标志。像北京、上海等大型城市立交系统已较为完善,但像秦皇岛等小中型的二三线城市立交桥才刚刚开始。比较幸运的是随着我国经济的快速发展科学技术也突飞猛进,交通仿真系统近些年也得到了快速的发展。 Vissim作为一种微观、基于时间间隔和驾驶行为的仿真建模工具,用以建模和分析各种交通条件下,城市交通和公共交通的运行状况,是评价交通工程设计和城市规划方案的有效工具。为了更好地研究立交桥的通行能力和服务水平,我们希望通过利用VI SSIM建立立交桥的仿真模型。通过得到的各种交通统计数据,对各种交通条件下立交桥的运行情况进行分析,从而找出更好的立交
1. VISSIM简介 (1) 2定义路网属性 (4) 2.1物理路网 (4) 2.1.1准备底图的创建流程 (4) 2.1.2添加路段(Links) (7) 2.1.3连接器 (9) 2.2定义交通属性 (10) 2.2.1定义分布 (10) 2.2.2目标车速变化 (12) 2.2.3 交通构成 (14) 2.2.4 交通流量的输入 (15) 2.3路线选择与转向 (15) 2.4 信号控制交叉口设置 (17) 2.4.1信号参数设置 (17) 2.4.2信号灯安放及设置 (20) 2.4.3优先权设置 (21) 3仿真 (24) 3.1 参数设置 (24) 3.2 仿真 (25) 4评价 (26) 4.1 行程时间 (26) 4.2 延误 (28) 4.3 数据采集点 (30) 4.4 排队计数器 (32)
1. VISSIM简介 VISSIM为德国PTV公司开发的微观交通流仿真软件系统,用于交通系统的各种运行分析。该软件系统能分析在车道类型、交通组成、交通信号控制、停让控制等众多条件下的交通运行情况,具有分析、评价、优化交通网络、设计方案比较等功能,是分析许多交通问题的有效工具。 VISSIM采用的核心模型是Wiedemann于1974年建立的生理-心理驾驶行为模型。该模型的基本思路是:一旦后车驾驶员认为他与前车之间的距离小于其心理(安全)距离时,后车驾驶员开始减速。由于后车驾驶员无法准确判断前车车速,后车车速会在一段时间内低于前车车速,直到前后车间的距离达到另一个心理(安全)距离时,后车驾驶员开始缓慢地加速,由此周而复始,形成一个加速、减速的迭代过程。 图1.1 VISSIM中的跟车模型(Wiedemann 1974) VISSIM的主要应用包括: 除了内建的定时信号控制模块外,还能够应用VAP、TEAPAC、VS-PLUS等感应信号控制模块。 在同时应用协调信号控制和感应信号控制的路网中,评价和优化(通过与
VISSIM交叉口仿真教程(新手版)概述:如今交通信息化已经成为当下交通工程发展的新方向,而vissim作为一种重要的交通仿真软件,已经越来越多的应用在交通仿真的各个方面。 交叉口的制作: 第一步:加入背景 图表 1 选取编辑选项 图表 2 如图读取背景图片
图表 3 选取比例选项,之后在背景上选取对应的车道宽度 第二步:绘制路网: 使用最左边工具栏里的进行路网的绘制,按照车流前进的方向点死鼠标右键拉线,确定link的起终点,之后进行link参数的选择(包括车道等) 如此,将背景图中的所有道路一一覆盖
第三步:连接各个link 选取要连接的link点击在其上点击右键然后拉向要被连接的link,之后显示出参数界面(包括可以取的曲线点的数目、link里的不同车道等),之后就有了link之间的连接线 依此连接所有可行的link,为下一步输入车流打好基础。
第四步:加入交通量 使用最左边工具栏里的进行车流的放入,在link的远端起点(交叉口的进口道远端)选中该link后点击右键,得到下图所显示的车辆输入界面: 作为实验可以如图输入参数,表示该link编号为1,一个仿真周期输入车流量1111,车辆类型及种类选取了默认。 第五步:给出车辆运行的路径: 使用最左边工具栏里的进行路径的给出。首先左键选取起始的link,在其上点击右键,然后左键选取想要去的link,在其上点击右键,则可以得到图示的效果:
图中的红线和绿线即为点击右键的位置。如此,车辆可以向三个方向运行了。当然,必须之前连好的link之间才可以设置路径。 第六步:给出信号灯配时: 首先选取最上边菜单栏的信号控制中的编辑信号控制机选项,得到下图: 新建新的信号配时方案之后,选取最简单的固定配时进行设置:首先点击编辑信号控制,在新的界面里根据要仿真的实际相位需求添加需要的信号灯组,然后添加新的信号配时方案;接着在信号灯组中选取红绿灯的形式,之后在信号配时方案中进行相位的设置,控制不同灯组出现的时间,下图为信号配时方案示例: