
基于双目立体视觉技术的轮式机器人位姿
测量方法研究
尤波李楠沈爱华许家忠
(哈尔滨理工大学自动化学院,哈尔滨150080)
Study of position and posture measuring method for wheeled robot based on binocular stereo vision technique
YOU Bo ,LI Nan ,SHEN Ai-hua ,XU Jia-zhong
(College of Automation ,Harbin University of Science and Technology ,Harbin 150080,China )
文章编号:1001-3997(2011)08-0173-03
【摘要】为规划轮式机器人运动轨迹,需要获得轮式机器人在空间中的位姿,提出一种基于机器视觉软件Halcon9.0测量轮式机器人位姿的方法,利用机器视觉软件实现机器人图像实时采集、摄像机标定、特征点提取、坐标系变换、位姿转换实现机器人位姿的非接触式检测。试验结果表明采用机器视觉方法和采用陀螺仪检测得到的数据变化趋势吻合,验证了该方法可行性和可靠性。每次测量机器人位姿的时间仅需要678.089ms ,对实时测量运动目标位姿的非接触检测有参考价值。
关键词:双目立体视觉;非接触式测量;机器人;位姿【Abstract】Acquisition of wheeled robots ’pose information is essential to its trajectory planning ,for which a binocular-stereovision non-contact measurement approach is developed using Halcon9.0,taking advantages of such package services as real-time image acquisition,camera calibration ,feature points ex -traction ,coordinate system transformation and pose conversion.This approach is verified by experiment that the pose acquired by machine vision fits with data variation trend measured by gyroscope.Sampling interval is 678.089ms ,which provides a sound reference for real-time non-contact motion measurement.
Key words :Binocular stereovision ;Non-contact measurement ;Robot ;Pose
中图分类号:TH16,TP274
文献标识码:A
*来稿日期:2010-10-25
1引言
在海洋船舶定向、钻井设备测斜、飞行器姿态参照中均会遇到运动物体的位姿测量问题。多年来,国内外很多学者针对获取动态目标位姿做了大量研究,一些科研人员采用GPS 进行动态载体姿态测量,这种方法结合当地水平坐标系与载体坐标系的转换关系来进行载体姿态的解算,具有较高的计算效率及稳定性[1];一些科研人员采用加速度计、磁阻传感器和单片机检测运动物体姿态,提出了环境磁场补偿算法并讨论了补偿算法的误差[2];国外科研人员设计了全息反射型多自由度测量系统,利用圆光栅作为目标靶,通过测量其0级和I 级衍射光的偏转角计算物体位姿[3-4]。然而GPS 位姿测量系统受天线距离和测试环境制约较大,缺乏灵活性[5];采用多传感器方法直接或间接测量位姿,系统精度受传感器数量和精度影响较大,且系统误差随着时问有累积效应[6]
。提出基于机器视觉软件
Halcon9.0的双目立体视觉算法测量轮式机器人位姿的方法,通过图像采集、摄像机标定、图像校正、特征点匹配确定机器人坐标系在世界坐标系中的位姿,实现机器人在世界坐标系中位姿的非接触测量,并通过试验验证了该方法的可行性和可靠性。
2双目立体视觉原理
假设存在一个结构非常简单的双目视觉系统,两个摄像机光轴平行并且它们的内参完全相同,平视双目立体成像原理图,如图1所示。假定两摄像机的成像平面在同一个平面上,
则点P 在左右图像坐标的v 坐标相同,即:v 1=v 2(1)由三角几何关系得到:u 1=f x c z c ,u 2=f x c -b z c
,v 1=v 2=f y c
z c (2)(3)(4)式中:x c 、y c 、z c
—点P 在左摄像机坐标系中的坐标;b —基线距;f
—两个摄像机的焦距;u 1、v 1、u 2、v 2—点在左、右图像中对应
点P 1、P 2的像平面坐标。视差定义为某一点在两幅图像中相应点的位置差d :d=u 1-u 2=f b z
c (5)
基线距b
O X
Y Z O 1
v
u
O 2
u
v P 1(u 1,
v 1)P 2(u 2,v 2)P (x c ,y c ,z c
)
左图像左
侧摄像机焦距f
右
侧摄像机
右图像图1双目平视立体成像原理图一个垂直截面
由此可计算出空间中某点P 在左摄像机坐标系中的坐标为:x c =b u 1,y c =b v ,z c =b f (6)(7)(8)
3轮式机器人位姿检测
3.1双目立体视觉系统结构
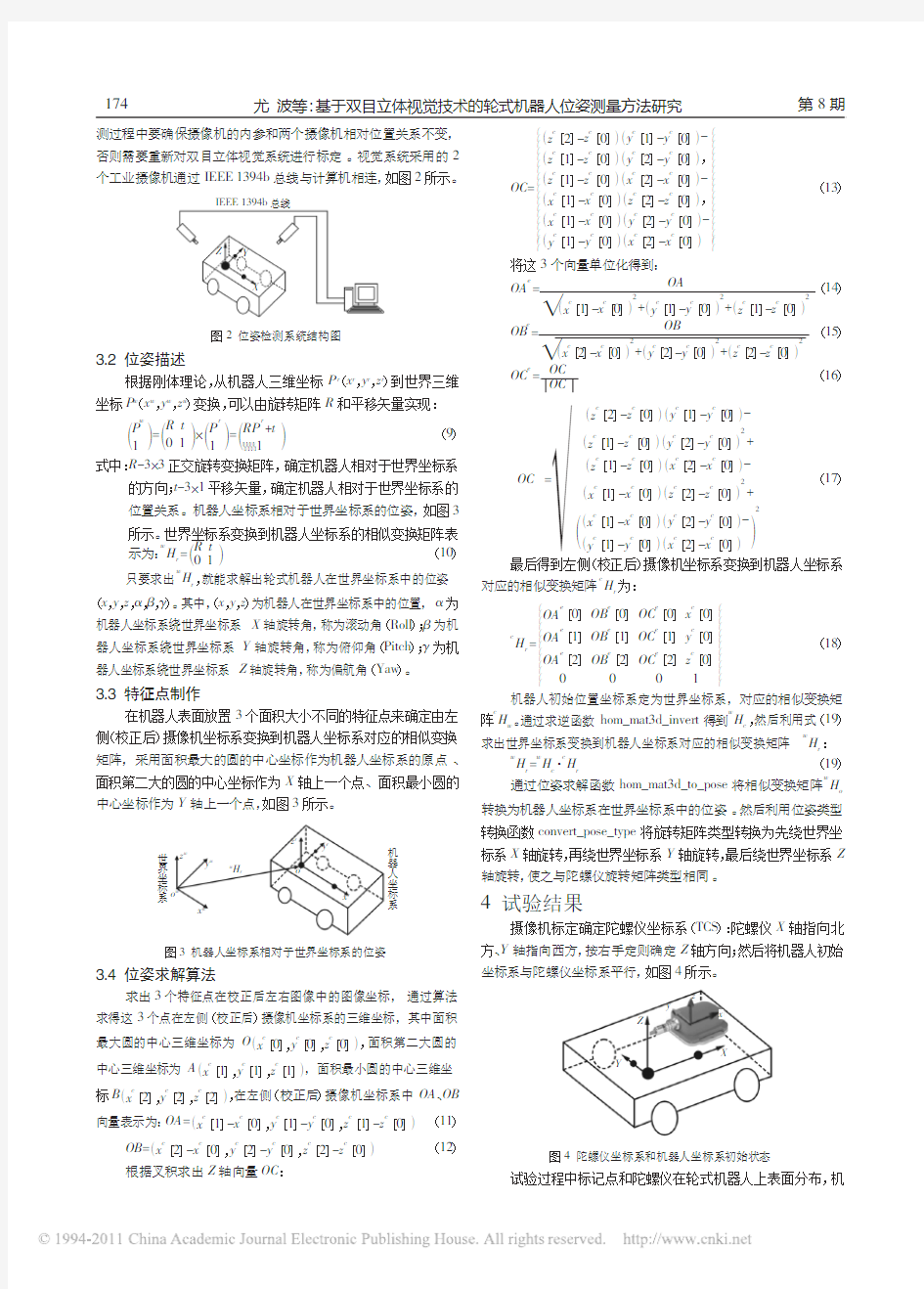
双目立体视觉系统的结构为交叉摆放的两个摄像机从不同角度观测同一被测物体,确保两幅图像有足够大的交迭区域,检
MachineryDesign&Manufacture
机械设计与制造
第8期
2011年8月
173
测过程中要确保摄像机的内参和两个摄像机相对位置关系不变,否则需要重新对双目立体视觉系统进行标定。视觉系统采用的2个工业摄像机通过IEEE 1394b 总线与计算机相连,如图2所示。
IEEE 1394b 总线
Z Y X
图2位姿检测系统结构图
3.2位姿描述
根据刚体理论,从机器人三维坐标P r
(x r
,y r
,z r
)到世界三维
坐标P w
(
x w ,y w ,z w )变换,可以由旋转矩阵R 和平移矢量实现:P w
2%1=R t 02%1×P r
2%1=RP r
+t
%%%%2%1
(9)
式中:
R -3×3正交旋转变换矩阵,确定机器人相对于世界坐标系的方向;t -3×1平移矢量,确定机器人相对于世界坐标系的位置关系。机器人坐标系相对于世界坐标系的位姿,如图3所示。世界坐标系变换到机器人坐标系的相似变换矩阵表
示为:w
H r =R t 02%
1(10)
只要求出w
H r ,就能求解出轮式机器人在世界坐标系中的位姿
(x ,
y ,z ,α,β,γ)。其中,(x ,y ,z )为机器人在世界坐标系中的位置,α为机器人坐标系绕世界坐标系X 轴旋转角,称为滚动角(Roll );β为机器人坐标系绕世界坐标系Y 轴旋转角,
称为俯仰角(Pitch );γ为机器人坐标系绕世界坐标系Z 轴旋转角,称为偏航角(Yaw )。
3.3特征点制作
在机器人表面放置3个面积大小不同的特征点来确定由左侧(校正后)摄像机坐标系变换到机器人坐标系对应的相似变换矩阵,采用面积最大的圆的中心坐标作为机器人坐标系的原点、面积第二大的圆的中心坐标作为X 轴上一个点、面积最小圆的中心坐标作为Y 轴上一个点,如图3所示。
世界坐标系z
w
y w
o
w x
w
w
H r z r
y r
o
r
x r
机
器人坐标系
图3机器人坐标系相对于世界坐标系的位姿
3.4位姿求解算法
求出3个特征点在校正后左右图像中的图像坐标,通过算法求得这3个点在左侧(校正后)摄像机坐标系的三维坐标,其中面积
最大圆的中心三维坐标为O x c
[0],y c
[0],z c
[02%]
,面积第二大圆的中心三维坐标为A x c
[1],y c
[1],z c
[12%]
,面积最小圆的中心三维坐标B x c
[2],y c
[2],z c
[22%]
,在左侧(校正后)摄像机坐标系中OA 、OB 向量表示为:OA=x c
[1]-x c
[0],y c
[1]-y c
[0],z c
[1]-z c
[02%]
(11)OB=x c
[2]-x c
[0],y c
[2]-y c
[0],z c
[2]-z c
[02%]
(12)
根据叉积求出Z 轴向量OC :
OC=
z c [2]-z c [02%]y c [1]-y c
[02%]-z c [1]-z c [02%]y c [2]-y c [02%],z c [1]-z c [02%]x c [2]-x c [02%]-x c [1]-x c [02%]z c [2]-z c [02%],x c [1]-x c [02%]y c [2]-y c [02%]-y c [1]-y c [02%]x c [2]-x c [02%]
0000000000000000000
00000000000000000000
(13)
将这3个向量单位化得到:OA e =
OA x c
[1]-x c
[02
%]2
+y c
[1]-y c
[02%]2+z c
[1]-z c
[02%]2
姨(14)OB e
=
OB
x c
[2]-x c
[02
%]2+y c
[2]-y c
[02%]2+z c
[2]-z c
[02%]2
姨(15)
OC e
=OC
OC
(16)
OC =
z c [2]-z c [02%]y c [1]-y c
[02%]-z c [1]-z c [02%]y c [2]-y c [02%]2
+z c [1]-z c [02%]x c [2]-x c [02%]-x c [1]-x c [02%]z c [2]-z c [02%]
2+x c [1]-x c [02%]y c [2]-y c
[02%]-y c [1]
-y c [02%]x c [2]-x c [02%]2
%
2
姨
(17)
最后得到左侧(校正后)摄像机坐标系变换到机器人坐标系对应的相似变换矩阵c
H r 为:
c
H r =OA e [0]OB e [0]OC e [0]x c [0]OA e [1]OB e
[1]OC e
[1]y c
[0]OA e [2]OB e [2]OC e [2]z c
[0]0000
000000000000
00
000
00
1(18)
机器人初始位置坐标系定为世界坐标系,对应的相似变换矩阵c
H w 。通过求逆函数hom_mat3d_invert 得到w
H c ,然后利用式(19)求出世界坐标系变换到机器人坐标系对应的相似变换矩阵w
H r :
w
H r =w
H c ·c
H r
(19)
通过位姿求解函数hom_mat3d_to_pose 将相似变换矩阵w
H o
转换为机器人坐标系在世界坐标系中的位姿。然后利用位姿类型转换函数convert_pose_type 将旋转矩阵类型转换为先绕世界坐
标系X 轴旋转,
再绕世界坐标系Y 轴旋转,最后绕世界坐标系Z 轴旋转,使之与陀螺仪旋转矩阵类型相同。
4试验结果
摄像机标定确定陀螺仪坐标系(TCS ):陀螺仪X 轴指向北方、Y 轴指向西方,按右手定则确定Z 轴方向;然后将机器人初始坐标系与陀螺仪坐标系平行,如图4所示。
Z
Y
X
y z
x
图4陀螺仪坐标系和机器人坐标系初始状态
试验过程中标记点和陀螺仪在轮式机器人上表面分布,机
第8期
尤波等:基于双目立体视觉技术的轮式机器人位姿测量方法研究
174
器人的初始位置,定为世界坐标系,如图5所示。
y
x
z
图5机器人世界坐标系
机器人运动过程中,机器人坐标系和世界坐标系位置关系,如图6所示。
y y
z
z
x
x
图6机器人坐标系和世界坐标系位置关系
机器人运动过程中,采用双目立体系统和陀螺仪各采集10组机器人在不同状态的姿态值,每种状态下各采集10次姿态值,经过均值滤波处理后,如表1所示。
表1双目立体系统测得的姿态和陀螺仪测得的姿态
序号S-Roll S-Pitch S-Yaw T-Roll T-Pitch T-Yaw 1-0.020.00-0.000.39-0.480.102 6.96 1.06-4.937.97-0.18-1.9930.050.20-12.900.58-0.03-12.0940.120.5613.400.67-0.4114.765-0.340.30-18.960.74-0.15-16.1767.03 1.32-27.998.500.82-25.027-17.77-16.02-29.69-15.83-16.17-29.458-13.72-9.37-35.12-12.04-9.33-32.699 4.13-24.90-43.79 6.24-23.72-41.8510
0.26
-0.81
-65.68
0.70
-0.29
-62.19
注:S-Roll 、S-Pitch 、S-Yaw —用双目立体系统采集滚动角、俯仰角、偏航角;T-Roll 、T-Pitch 、T-Yaw —采用陀螺仪采集滚动角、俯仰角、偏航角。
将2种方法得到的滚动角、俯仰角、偏航角比较后得到的曲线,如图7所示。
1050-5
-10-15-20
R o l l (°)
2
46
8
10
试验序号
S-Roll
T-Roll
(a )滚动角比较曲线
P i t c h (°)
2
46
8
10试验序号
S-Pitch T-Pitch
50-5-10-15-20
-25
(b )俯仰角比较曲线
2
46
8
10试验序号
S-Yaw T-Yaw
200-20-40-60-80
Y a w (°)(c )偏航角比较曲线
图7两种方法检测到的滚动角、俯仰角、偏航角比较曲线
由图7的曲线可知,通过双目立体视觉系统测得的姿态角与陀螺仪测得的姿态角之间存在一定的误差,分析实验过程得出实验误差的主要原因是:(1)在初始位置时机器人坐标系与陀螺仪坐标系没有严格平行;(2)陀螺仪工作一段时间后,系统误差随着时间有累积效应;(3)由于摄像机获取机器人图像质量受光源影响,获取标记点中心图像坐标时会有一定的误差;(4)视觉系统的安装方法也影响测量结果的精度。
5结论
搭建了基于双目立体视觉的轮式机器人位姿测量系统,实现轮式机器人位姿非接触式测量。使用Halcon 标准的标定板可以方便地实现摄像机标定,利用该软件的双目立体视觉算法可以快速、精确地实现特征点的提取和匹配,每次测量机器人位姿的时间仅需要678.089ms ,该方法对实时测量运动目标位姿的非接触检测有参考价值。
参考文献
[1]王磊,翟国君,赵俊生,暴景阳.一种利用GPS 进行动态载体姿态测量
的新方法.测绘通报,2006,10(10):1-3.
[2]刘越,王涌天,胡晓明.测量运动物体姿态的三自由度定位算法的研究
[J ].计算机测量与控制,2002,10(6):1-4.
[3]Eui Won Bae ,Jong-Ahn Kim ,Soo Hyun Kim.Multi-degree-of-freedom
displacement measurement system for milli -structures.Meas Sci Techn01,2001,12(9):1495-l502.
[4]Jong-AhnKim ,etal.Designmethodsforsix-degree-of-freedomdisplacement
measurement systems using cooperative targets.Precion Engineering ,2002,26(1):99-104.
[5]许江宁,朱涛,等.GPS 姿态测量技术综述[J ].海军工程程大学学报,2003,
15(3):17-22.
[6]范忠刚,许士文.多自由度测量技术的发展[J ].应用光学,2003,24(6):1-4.
机械设计与制造
No.8Aug.2011
175
双目视觉成像原理 1.引言 双目立体视觉(Binocular Stereo Vision)是机器视觉的一种重要形式,它是基于视差原理并利用成像设备从不同的位置获取被测物体的两幅图像,通过计算图像对应点间的位置偏差,来获取物体三维几何信息的方法。融合两只眼睛获得的图像并观察它们之间的差别,使我们可以获得明显的深度感,建立特征间的对应关系,将同一空间物理点在不同图像中的映像点对应起来,这个差别,我们称作视差(Disparity)图。 双目立体视觉测量方法具有效率高、精度合适、系统结构简单、成本低等优点,非常适合于制造现场的在线、非接触产品检测和质量控制。对运动物体(包括动物和人体形体)测量中,由于图像获取是在瞬间完成的,因此立体视觉方法是一种更有效的测量方法。双目立体视觉系统是计算机视觉的关键技术之一,获取空间三维场景的距离信息也是计算机视觉研究中最基础的内容。 2.双目立体视觉系统 立体视觉系统由左右两部摄像机组成。如图一所示,图中分别以下标L和r标注左、右摄像机的相应参数。世界空间中一点A(X,Y,Z)在左右摄像机的成像面C L和C R上的像点分别为al(ul,vl)和ar(ur,vr)。这两个像点是世界空间中同一个对象点A的像,称为“共轭点”。知道了这两个共轭像点,分别作它们与各自相机的光心Ol和Or的连线,即投影线alOl和arOr,它们的交点即为世界空间中的对象点A(X,Y,Z)。这就是立体视觉的基本原理。 图1:立体视觉系统 3.双目立体视觉相关基本理论说明 3.1 双目立体视觉原理 双目立体视觉三维测量是基于视差原理,图2所示为简单的平视双目立体成像原理图,两摄像机的投影中心的连线的距离,即基线距为b。摄像机坐标系的原点在摄像机镜头的光心处,坐标系如图2所示。事实上摄像机的成像平面在镜头的光心后,图2中将左右成像平面绘制在镜头的光心前f处,这个虚拟的图像平面坐标系O1uv的u轴和v轴与和摄像机坐标系的x轴和y轴方向一致,这样可以简化计算过程。左右图像坐
基于halcon的双目立体视觉焊缝检测
基于halcon的双目立体视觉焊缝检测 1 前言 现代焊接生产中,对焊接技术和质量的要求愈来愈高。自动化和智能化在焊接生产上的应用日趋广泛。 近年来图像处理技术和机器视觉技术得到空前的发展,如果把机器视觉技术用在焊缝成形质量评判中,可以提高评判效率,为焊接质量评判的智能化打下基础。机器视觉是运用计算机来模拟人的视觉,从不同事物的图像中获取信息,进行相应处理并加以分析、理解,最终应用于实际的检测与测量等。机器视觉检测和测量方法不但可以有效提高生产效率与自动化程度,且易于实现信息的集成,从而满足数字化自动化生产的要求。 机器视觉中的立体视觉技术把二维景物的分析推广到了三维景物,该项技术可方便实现从图像获取到三维景物表面重建的完整体系,对于整个机器视觉的发展具有重要意义。双目立体视觉是立体视觉中的一个重要的分支,它直接模拟人视觉处理景物的方式,可以在各种条件下灵活地测量景的立体信息。
2 双目视觉检测 2.1 基本理论 如图1 所示,设点P为空间焊缝某一特征点,该点在两相机平面O1和O2的投影点依次为P1和P2。 图1 双目视觉原理 根据空间解析几何理论,很显然,式( 3) 中的4个方程均具有平面解析式的形式,前2 方程代表2平面相交,得到的是直线O1P1P 的方程,同理直线O2P2P 的方程由后2 个方程得出。两直线方程相交,即可求出P 点的空间三维坐标。 可见,若采用单相机模型,则理论上仅能解出一条直线的空间方程,无法得出空间点的准确三维坐标,而双目视觉理论则能够克服这个缺陷,从而使焊缝的精确测量有了可能。 2.2图像处理 为实现准确测量的目的,必须对采集到的图像进行数字化处理。首先,经过相机采集到的焊缝图像不可避免地存在一些污染痕迹,这
本技术公开了一种基于双目立体视觉三维重建系统,涉及三维重建系统技术领域;机箱的底部四角处均固定安装有行走轮,机箱的内部分别固定安装有蓄电池与处理计算机,机箱的上端分别固定安装有显示器与安装架,安装架上通过轴承座固定安装有主轴,主轴的下端固定安装有安装齿轮,安装齿轮与驱动齿轮相啮合,驱动齿轮固定安装有驱动电机的轴上,驱动电机通过螺栓安装在安装架上,主轴的上端固定安装有连接轴,连接轴为横向设置,连接轴的两端固定安装有双摄像头,连接轴的中上端固定安装有照明灯;本技术能够实现快速控制,稳定性高,且控制准确,操作简便,能够节省时间;使用方便,结构简单,且效率高,能够在检测时进行补光。 技术要求
1.一种基于双目立体视觉三维重建系统,其特征在于:包括机箱、行走轮、蓄电池、处理计算机、显示器、安装架、驱动齿轮、驱动电机、安装齿轮、主轴、连接轴、双摄像头、照明灯;机箱的底部四角处均固定安装有行走轮,机箱的内部分别固定安装有蓄电池与处理计算机,机箱的上端分别固定安装有显示器与安装架,安装架上通过轴承座固定安装有主轴,主轴的下端固定安装有安装齿轮,安装齿轮与驱动齿轮相啮合,驱动齿轮固定安装有驱动电机的轴上,驱动电机通过螺栓安装在安装架上,主轴的上端固定安装有连接轴,连接轴为横向设置,连接轴的两端固定安装有双摄像头,连接轴的中上端固定安装有照明灯,蓄电池通过导线与处理计算机、显示器的电源端电连接,双摄像头通过导线与处理计算机的输入端电连接,处理计算机的输出端分别与驱动电机、照明灯电连接,显示器与处理计算机的输入、输出端电连接。 2.根据权利要求1所述的一种基于双目立体视觉三维重建系统,其特征在于:所述显示器为触摸式显示屏。 3.根据权利要求1所述的一种基于双目立体视觉三维重建系统,其特征在于:所述行走轮为减震式万向行走轮。 4.根据权利要求1所述的一种基于双目立体视觉三维重建系统,其特征在于:所述驱动电机为低速电机。 5.根据权利要求1所述的一种基于双目立体视觉三维重建系统,其特征在于:所述照明灯为LED灯。 技术说明书 一种基于双目立体视觉三维重建系统 技术领域 本技术属于三维重建系统技术领域,具体涉及一种基于双目立体视觉三维重建系统。 背景技术
双目视觉成像原理
双目视觉成像原理 1.引言 双目立体视觉(Binocular Stereo Vision)是机器视觉的一种重要形式,它是基于视差原理并利用成像设备从不同的位置获取被测物体的两幅图像,通过计算图像对应点间的位置偏差,来获取物体三维几何信息的方法。融合两只眼睛获得的图像并观察它们之间的差别,使我们可以获得明显的深度感,建立特征间的对应关系,将同一空间物理点在不同图像中的映像点对应起来,这个差别,我们称作视差(Disparity)图。 双目立体视觉测量方法具有效率高、精度合适、系统结构简单、成本低等优点,非常适合于制造现场的在线、非接触产品检测和质量控制。对运动物体(包括动物和人体形体)测量中,由于图像获取是在瞬间完成的,因此立体视觉方法是一种更有效的测量方法。双目立体视觉系统是计算机视觉的关键技术之一,获取空间三维场景的距离信息也是计算机视觉研究中最基础的内容。2.双目立体视觉系统 立体视觉系统由左右两部摄像机组成。如图一所示,图中分别以下标L和r标注左、右摄像机的相应参数。世界空间中一点A(X,Y,Z)在左右摄像机的成像面C L和C R上的像点分别为al(ul,vl)和ar(ur,vr)。这两个像点是世界空间中同一个对象点A的像,称为“共轭点”。知道了这两个共轭像点,分别作它们与各自相机的光心Ol和Or的连线,即投影线alOl和arOr,它们的交点即为世界空间中的对象点A(X,Y,Z)。这就是立体视觉的基本原理。
图1:立体视觉系统 3.双目立体视觉相关基本理论说明 3.1 双目立体视觉原理 双目立体视觉三维测量是基于视差原理,图2所示为简单的平视双目 立体成像原理图,两摄像机的投影中心的连线的距离,即基线距为b 。摄像机坐标系的原点在摄像机镜头的光心处,坐标系如图2所示。事实上摄像机的成像平面在镜头的光心后,图2中将左右成像平面绘制在镜头的光心前f 处,这个虚拟的图像平面坐标系O1uv 的u 轴和v 轴与和摄像机坐标系的x 轴和y 轴方向一致,这样可以简化计算过程。左右图像坐标系的原点在摄像机光轴与平面的交点O1和O2。空间中某点P 在左图像和右图像中相应的坐标分别为P1(u1,v1)和P2(u2,v2)。假定两摄像机的图像在同一个平面上,则点P 图像坐标的Y 坐标相同,即v1=v2。由三角几何关系得到: c c 1z x f u = c c 2z )b -x (f u = v 1 c c 21z y f v v ==
基于OpenCV的双目立体视觉测距 基于OpenCV的双目立体视觉测距 论文导读:: 双目立体视觉模型。摄像机标定。立体匹配采用OpenCV库中的块匹配立体算法。目前的测距方法主要有主动测距和被动测距两种方法。论文 关键词: 双目立体视觉,摄像机标定,立体匹配,测距 (一)引言基于计算机视觉理论的视觉测距技术是今后发展的一个重要方向,它在机器人壁障系统、汽车导航防撞系统等领域有着广泛的应用前景。目前的测距方法主要有主动测距和被动测距两种方法。论文采用的是被动测距法。被动测距法是在自然光照条件下,根据被测物体本身发出的信号来测量距离,主要包括立体视觉测距法、单目测距法、测角被动测距法等。立体视觉测距法是仿照人类利用双目感知距离信息的一种测距方法,直接模拟人的双眼处理景物,简便可靠,但该方法的难点是选择合理的匹配特征和匹配准则。双目立体视觉系统采用两台摄像机同时从两个不同视点获取同一景物的多幅图像,即立体图像对,通过测量景物在立体图像对中的视差,再利用双目视觉成像原理就可以计算出目标到摄像机的距离。立体匹配采用OpenCV库中的块匹配立体算法,在得到摄像机参数和匹配点后再利用最小二乘法即可算出三维信息。 (二)双目立体视觉模型首先介绍双目视觉所涉及到三个坐标系: 世界坐标系、摄像机坐标系和图像坐标系。世界坐标系中的点坐标记为,摄像机坐标系用表示。图像坐标为摄像机所拍摄到的图像的二维坐标,一般有两种表示方法:
是以像素为单位的图像坐标,是以毫米为单位的图像坐标。建立以毫米为单位的图像坐标是因为坐标只表示了像素在数字图像中的行数和列数,并没有表示出该像素在数字图像中的物理位置论文范文。图1为平行双目视觉模型,即参数相同的两个摄像机平行放置,两光 轴互相平行且都平行于z 轴,x 轴共线摄像机标定,两摄像机光心的距离为 B(即基线距)。图中O 1、O2为左右两摄像机的焦点,I1 、I2为左右摄像机的像平面,P1 、P2 分 别是空间点P在左右像平面上的成像点,f是摄像机的焦距。若视差d 定义为?P1- P2?,则点P到立体视觉系统的距离为: 图1 平行双目视觉模型 (三)摄像机标定摄像机标定是为了建立三维世界坐标与二维图像坐标之间的 一种对应关系。系统采用两个摄像机进行图像采集,设定好两个摄像机之间的距离(即基线距),用摄像机同时采集放在摄像机前的标定物。摄像机标定采用的是张正友的标定方法,棋盘格大小为30mm30mm,角点数为117。标定板的规格如图2所示。图2 平面标定板规格张正友的标定方法需要摄像机从不同角度拍摄标定板 的多幅图像。由于两个摄像机是向前平行放置的,且基线距固定,所以只需摆放标定板的位置变化即可。摄像机为针孔成像模型,则空间点与图像点之间的映射关系为: 为方便计算,使标定板所在平面的Z坐标均为0,即Z=0的平面,则上式可变为: 其中,A为摄像机的内参矩阵,为摄像机外参矩阵,s为尺度因子。令,,则上 式可写为: 其中,为透视投影矩阵,它是标定板上的点和其像点之间的映射。在已知空 间点和其对应像点后,可根据最小二乘方程,采用Levenberg-Marquardt算法求解
双目立体视觉的水下应用 从图像预处理、相机标定、立体匹配三个方面论述了双目视觉在水下场景的应用,比较了与空气环境中应用的不同,对水下双目视觉发展趋势做了分析。 标签:水下双目视觉;相机标定;立体匹配 Abstract:This paper discusses the application of binocular vision in underwater scene from three aspects of image preprocessing,camera calibration and stereo matching,compares the application of binocular vision with that in air environment,and analyzes the development trend of underwater binocular vision. Keywords:underwater binocular vision;camera calibration;stereo matching 引言 双目立体视觉技术利用视差理论恢复像素的深度信息和三维坐标,通过获取左右两个视角下同时采集的两幅图像恢复三维场景信息,还原真实的三维世界,为导航提供目标的位置信息描述,是被动式视觉测量技术的一种。作为计算机视觉的一个重要分支,双目立体视觉技术模型简洁,运算高效,有着广阔的应用前景。而随着海洋科学技术的发展和人类对海洋资源探索的逐渐深入,双目视觉技术逐渐被应用到海洋探测,在对水下目标的监控、海底地形测绘、海流测量、水下军事设施的探测和侦查等方面都有着广泛的应用。 双目立体视觉系统模拟人眼,通过三角测量原理来获取图像的视差,进而得到目标三维信息,一般由以下几个功能模块组成:图像采集,相机标定,立体匹配,三维重建。常规的双目视觉大多是在单一介质的空气中,而由于水下环境的特殊性,往往存在光的散射,吸收效应等不利因素的干扰,相关技术方法也应随环境作适应性调整。本文从图像处理,相机标定,立体匹配这三个方面在水下场景的应用做了论述,阐明了与单一空气介质环境中的不同,并对水下双目立体视觉技术的发展做了展望。 1 成像模型 双目立体视觉用到的模型一般是线性的针孔模型,该模型是双目立体视觉中成像的基本模型,将相机理想化,并把空间点投影视为中心,投影未考虑镜头畸变和环境等其他因素,所以也叫线性摄像机模型。而水下成像模型则是考虑到折射的影响,对此做相应补偿和修正。 在双目立体视觉系统中,为了研究空间点和像点的投影关系,通常会用到4个坐标系:世界坐标系OW-XWYWXW、相机坐标系O-xyz、图像物理坐标系O-XY和图像像素坐标系Of-uv。
邮局订阅号:82-946120元/年技术创新 软件时空 《PLC 技术应用200例》 您的论文得到两院院士关注 一种快速双目立体匹配方法 A Fast Stereo Matching Method for Binocular Images (苏州大学) 梅金燕龚声蓉赵勋杰 MEI Jin-yan GONG Sheng-rong ZHAO Xun-jie 摘要:在双目立体视觉中立体匹配是关键技术之一。为了提高匹配速度,提出一种新的立体匹配方法。首先根据极线约束条件限定同名点搜索区域,然后在极线约束区域使用活动轮廓分割出物体区域,进一步缩小匹配点搜索范围。在匹配算法方面,使用了邻域差值模板匹配方法。实验证明,提出的方法能够显著地提高匹配速度,并有较好的匹配精度。关键词:立体匹配;极线约束;活动轮廓;领域差值模板中图分类号:TP391文献标识码:A Abstract:Stereo matching is crucial for the distance measurement with binocular stereo system.Since the two cameras are hardly to be strictly parallel,matching based on epipolar constraint can not be applied directly.Analysing the system ’s module,a new mach -ing method was proposed in this paper.Firstly,the correct loaction area was selected based on the epipolar constraint.Secondly,the background was excluded out of the former area by active counter model.Finaly,the corresponding point is matched via feature tem -plate which is formed of neighborhood difference.The experimental results show that the proposed algorithm can improve stereo matching speed and it is more effective in the situation of detecting more than one point on the surface of the same object.Key words:Stereo matching;Epipolar constraint;Active counter;Neighborhood difference template 文章编号:1008-0570(2012)10-0415-03 引言 双目立体视觉是计算机视觉的一个重要分支,它是一种由两幅图像获取物体三维几何信息的方法。它利用两个摄像机对同一景物从不同的视角成像,然后根据视差和投影模型来获取景物的三维信息。双目立体视觉由于直接模拟了人类双眼视觉的生理构造,因此,在许多领域有着广阔的应用前景,如微操作系统的位姿检测与控制、机器人导航与航测、三维测量学及虚拟现实等。 在双目立体视觉中,通过立体匹配方法寻找空间同一物点在左、右两幅图像上对应的投影点(同名点)进而获得视差。立体匹配方法大体可以分为基于区域灰度和基于特征两类匹配方法。基于区域灰度的匹配方法简单,容易实现,但对于左图像中的每一像点,都要与右图像中所有点进行相 关运算,计算量大,实时性差,且对光照因素比较敏感。通过极线约束,可以沿物点对应极线搜索同名点,将二维搜索限制到一维搜索,提高匹配的速度。但是,在两图极线不平行时这种匹配方法不适合。针对这种情况,文献对整个图像平面投影进行校正,使两个图像重投影后极线平行,对校正后的图像进行相关匹配。然而,平面投影校正忽略了极线的方向性,在极点距离图像较近时图像失真严重,方法比较复杂。文献提出了基于极线局部校正的匹配算法,使基于灰度的匹配方法可以得到有效的应用,然而,该方法匹配时间较长,效率较低。文献在分析双目成像形成极线约束的基础上,从行和列两个方向上缩小第二幅图像待 匹配特征点坐标的搜索范围,提高了匹配速度,但是搜索范围通常包括前景和后景,匹配正确与否易受后景影响。 针对上述问题,本文提出了一种快速立体匹配方法。首先根据极线约束限定同名点搜索区域,然后通过检测物体轮廓去除背景区域,进一步约束搜索区域。最后,采用邻域差值模板进行匹配,将特征匹配和区域匹配两种方法结合起来,减小光照因素的影响。 1极线约束原理 在如图1所示的双目立体视觉系统中,假设三维空间点P 是两个摄像机均可见的空间场景物上的一点,点P 在光心点为 C L 和C R 相机像面I L 、I R 上的投影分别为P L 、P R ,由光心、 像点和空间点形成的平面称为极平面。两光心连线与像平面的交点分别为E L 、E R 。极平面与左像面I L 的交线P L E L 图1双目立体视觉中的极线几何关系 称为点P R 在图像I L 中的极线,交线P R E R 也有同样的定义。无论与P L 对应的P 点距离远近,它在右图上的投影点总是在P L 的极线P R E R 上。对于任意P L ,只需要在它的极线上寻找对应点 P R ;反之亦然。 这是双目视觉的一个重要特点,称之为极线约束。通过极线约束,我们可以由一个投影点知道其对应的极线,但不知道它对应点的具体位置,即极限约束是点与直线的对应,而不是点与点的对应。尽管如此,极限约束给出了对应点重要的约束条件,它将对应点匹配从整幅图像寻找限定在一条直线上需找对应点。因此,极大地减小了搜索地范围,对点的匹配具有 梅金燕:硕士研究生 基金项目:基金申请人:龚声蓉;项目名称:基于二型模糊概率图模型的多摄像头目标检测研究;基金颁发部门:国家自然科学基金委员会(61170124) 415--
双目立体视觉技术的实现及其进展 摘要:阐述了双目立体视觉技术在国内外应用的最新动态及其优越性。指出双目体视技术的实现分为图像获取、摄像机标定、特片提取、立体匹配和三维重建几个步骤,详细分析了各个步骤的技术特点、存在的问题和解决方案,并对双目体视技术的发展做了展望。 关键词:双目立体视觉计算机视觉立体匹配摄像机标定特征提取 双目立体视觉是计算机视觉的一个重要分支,即由不同位置的两台或者一台摄像机(CCD)经过移动或旋转拍摄同一幅场景,通过计算空间点在两幅国像中的视差,获得该点的三维坐标值。80年代美国麻省理工学院人工智能实验室的Marr提出了一种视觉计算理论并应用在双睛匹配上,使两张有视差的平面图产生在深度的立体图形,奠定了双目立体视觉发展理论基础。相比其他类的体视方法,如透镜板三维成像、投影式三维显示、全息照相术等,双目本视直接模拟人类双眼处理景物的方式,可靠简便,在许多领域均极具应用价值,如微操作系统的位姿检测与控制、机器人导航与航测、三维测量学及虚拟现实等。 1 双目体视的技术特点 双目标视技术的实现可分为以下步骤:图像获取、摄像机标定、特征提取、图像匹配和三维重建,下面依次介绍各个步骤的实现方法和技术特点。 1.1 图像获取 双目体视的图像获取是由不同位置的两台或者一台摄像机(CCD)经过移动或旋转拍摄同一幅场景,获取立体图像对。其针孔模型如图1。假定摄像机C1与C2的角距和内部参数都相等,两摄像机的光轴互相平行,二维成像平面X1O1Y1和X2O2Y2重合,P1与P2分别是空间点P在C1与C2上的成像点。但一般情况下,针孔模型两个摄像机的内部参数不可能完成相同,摄像机安装时无法看到光轴和成像平面,故实际中难以应用。 上海交大在理论上对会摄式双目体视系统的测量精度与系统结构参数之间的关系作了详尽分析,并通过试验指出,对某一特定点进行三角测量。该点测量误差与两CCD光轴夹角是一复杂的函数关系;若两摄像头光轴夹角一定,则被测坐标与摄像头坐标系之间距离越大,测量得到点距离的误差就越大。在满足测量范围的前提下,应选择两CCD之间夹角在50℃~80℃之间。 1.2 摄像机的标定 对双目体视而言,CCD摄像机、数码相机是利用计算机技术对物理世界进行重建前的基本测量工具,对它们的标定是实现立体视觉基本而又关键的一步。通常先采用单摄像机的标定方法,分别得到两个摄像机的内、外参数;再通过同一世界坐标中的一组定标点来建立两个摄像机之间的位置关系。目前常用的单摄像机标定方法主要有: (1)摄影测量学的传统设备标定法。利用至少17个参数描述摄像机与三维物体空间的结束关系,计算量非常大。 (2)直接线性变换性。涉及的参数少、便于计算。 (3)透视变换短阵法。从透视变换的角度来建立摄像机的成像模型,无需初始值,可进行实时计算。 (4)相机标定的两步法。首先采用透视短阵变换的方法求解线性系统的摄像机参数,再以求得的参数为初始值,考虑畸变因素,利用最优化方法求得非线性解,标定精度较高。 (5)双平面标定法。 在双摄像机标定中,需要精确的外部参数。由于结构配置很难准确,两个摄像机的距离
双目视觉的图像立体匹配系统文档 1 引言 计算机视觉技术的发展将光与影的艺术和计算机的逻辑性紧密结合起来,而双目立体视觉技术更将这种结合从平面二次元上升到立体的角度,为我们的生产生活提供了新的技术和工具,例如已经被普遍运用的3D电影技术,研发中的虚拟现实、谷歌视觉眼镜、汽车自动驾驶技术,即将上市的淘宝虚拟实景购物等,不断改变着我们的生活,另外双目立体视觉在军事、医学、工业等领域都有其重要的作用,是机器感知物体几何层级的基础,因此对双目视觉的理论研究成为推动立体视觉乃至计算机视觉技术在各个领域创造更高价值的重要因素。 在双目视觉的研究和运用中,最重要的一个阶段无疑为将平面图像转化为可计算机可识别的立体模型,这里将用到立体匹配技术,目前双目视觉研究领域用到的立体匹配算法及其衍生算法有很多种,算法的效率和匹配精度将直接影响到算法运用的响应时间和准确度[1],当今各种视觉智能设备的发展需要将立体匹配过程直接嵌入到单片机中,这种场景下,算法的效率和匹配精度将直接决定不同运算性能的嵌入式设备的选择和产品推广后的用户体验度,也将直接决定设备成本,因此研究出更加速度快、精度高的立体匹配算法在各领域都具有划时代的重要意义。 2 系统方案设计 2.1 双目视觉的图像立体匹配系统 说起立体视觉系统,要从人的双眼说起,人眼是一个典型的双目视觉系统,每只眼睛是一个摄像机,两只平行的眼睛是两台平行的摄像机,因为两只眼睛的位置不同,看到的图像是有差异的,这个差异就是立体视觉的基础,视觉信号传入大脑,大脑利用其强大的匹配能力,就可以基本确定图像中的物体的立体信息,或者叫做图像的深度信息。随着人们知识和生产生活的发展,需要通过仿真立体视觉的原理,让计算机获取到图像从2D向3D发展,即获取图像的深度信息,以实现一些和空间视觉有关的需求,这就出现了机器立体视觉技术。
双目立体视觉 双目立体视觉的研究一直是机器视觉中的热点和难点。使用双目立体视觉系统可以确定任意物体的三维轮廓,并且可以得到轮廓上任意点的三维坐标。因此双目立体视觉系统可以应用在多个领域。现说明介绍如何基于HALCON实现双目立体视觉系统,以及立体视觉的基本理论、方法和相关技术,为搭建双目立体视觉系统和提高算法效率。 双目立体视觉是机器视觉的一种重要形式,它是基于视差原理并由多幅图像获取物体三维几何信息的方法。双目立体视觉系统一般由双摄像机从不同角度同时获得被测物的两幅数字图像,或由单摄像机在不同时刻从不同角度获得被测物的两幅数字图像,并基于视差原理恢复出物体的三维几何信息,重建物体三维轮廓及位置。双目立体视觉系统在机器视觉领域有着广泛的应用前景。 HALCON是在世界范围内广泛使用的机器视觉软件。它拥有满足您各类机器视觉应用需求的完善的开发库。HALCON也包含Blob分析、形态学、模式识别、测量、三维摄像机定标、双目立体视觉等杰出的高级算法。HALCON支持Linux和Windows,并且可以通过C、C++、C#、Visual Basic和Delphi 语言访问。另外HALCON与硬件无关,支持大多数图像采集卡及带有DirectShow和IEEE 1394驱动的采集设备,用户可以利用其开放式结构快速开发图像处理和机器视觉应用软件。 一.双目立体视觉相关基本理论说明 1.1 双目立体视觉原理 双目立体视觉三维测量是基于视差原理,图1所示为简单的平视双目立体成像原理图,两摄像机的投影中心的连线的距离,即基线距为b。摄像机坐标系的原点在摄像机镜头的光心处,坐标系如图1所示。事实上摄像机的成像平面在镜头的光心后,图1中将左右成像平面绘制在镜头的光心前f处,这个虚拟的图像平面坐标系O1uv的u轴和v轴与和摄像机坐标系的x轴和y轴方向一致,这样可以简化计算过程。左右图像坐标系的原点在摄像机光轴与平面的交点O1和O2。空间中某点P在左图像和右图像中相应的坐标分别为P1(u1,v1)和P2(u2,v2)。假定两摄像机的图像在同一个平面上,则点P图像坐标的Y坐标相同,即v1=v2。由三角几何关系得到: 上式中(xc,yc,zc)为点P在左摄像机坐标系中的坐标,b为基线距,f为两个摄像机的焦距,(u1,v1)和(u2,v2)分别为点P在左图像和右图像中的坐标。 视差定义为某一点在两幅图像中相应点的位置差: 图1 双目立体成像原理图图3 一般双目立体视觉系统原理图
双目立体视觉技术简介 1. 什么是视觉 视觉是一个古老的研究课题,同时又是人类观察世界、认知世界的重要功能和手段。人类从外界获得的信息约有75%来自视觉系统,用机器模拟人类的视觉功能是人们多年的梦想。视觉神经生理学,视觉心里学,特别是计算机技术、数字图像处理、计算机图形学、人工智能等学科的发展,为利用计算机实现模拟人类的视觉成为可能。在现代工业自动化生产过程中,计算机视觉正成为一种提高生产效率和检验产品质量的关键技术之一,如机器零件的自动检测、智能机器人控制、生产线的自动监控等;在国防和航天等领域,计算机视觉也具有较重要的意义,如运动目标的自动跟踪与识别、自主车导航及空间机器人的视觉控制等。人类视觉过程可以看作是一个从感觉到知觉的复杂过程,从狭义上来说视觉的最终目的是要对场景作出对观察者有意义的解释和描述;从广义上说,是根据周围的环境和观察者的意愿,在解释和描述的基础上做出行为规划或行为决策。计算机视觉研究的目的使计算机具有通过二维图像信息来认知三维环境信息的能力,这种能力不仅使机器能感知三维环境中物体的几何信息(如形状、位置、姿态运动等),而且能进一步对它们进行描述、存储、识别与理解,计算机视觉己经发展起一套独立的计算理论与算法。 2. 什么是计算机双目立体视觉 双目立体视觉(Binocular Stereo Vision)是机器视觉的一种重要形式,它是基于视差原理并利用成像设备从不同的位置获取被测物体的两幅图像,通过计算图像对应点间的位置偏差,来获取物体三维几何信息的方法。融合两只眼睛获得的图像并观察它们之间的差别,使我们可以获得明显的深度感,建立特征间的对应关系,将同一空间物理点在不同图像中的映像点对应起来,这个差别,我们称作视差(Disparity)图像,如图一。 图一、视差(Disparity)图像 双目立体视觉测量方法具有效率高、精度合适、系统结构简单、成本低等优点,非常适合于制造现场的在线、非接触产品检测和质量控制。对运动物体(包括动物和人体形体)测量中,由于图像获取是在瞬间完成的,因此立体视觉方法是一种更有效的测量方法。 双目立体视觉系统是计算机视觉的关键技术之一,获取空间三维场景的距离信息也是计算机视觉研究中最基础的内容。 双目立体视觉的开创性工作始于上世纪的60年代中期。美国MIT的Roberts通过从数字图像中提取立方体、楔形体和棱柱体等简单规则多面体的三维结构,并对物体的形状和空间关系
基于HALCON的双目立体视觉系统实现 段德山(大恒图像公司) 摘要双目立体视觉的研究一直是机器视觉中的热点和难点。使用双目立体视觉系统可以确定任意物体的三维轮廓,并且可以得到轮廓上任意点的三维坐标。因此双目立体视觉系统可以应用在多个领域。本文将主要介绍如何基于HALCON实现双目立体视觉系统,以及立体视觉的基本理论、方法和相关技术,为搭建双目立体视觉系统和提高算法效率提供了参考。 关键词双目视觉三维重建立体匹配摄像机标定视差 双目立体视觉是机器视觉的一种重要形式,它是基于视差原理并由多幅图像获取物体三维几何信息的方法。双目立体视觉系统一般由双摄像机从不同角度同时获得被测物的两幅数字图像,或由单摄像机在不同时刻从不同角度获得被测物的两幅数字图像,并基于视差原理恢复出物体的三维几何信息,重建物体三维轮廓及位置。双目立体视觉系统在机器视觉领域有着广泛的应用前景。 HALCON是在世界范围内广泛使用的机器视觉软件。它拥有满足您各类机器视觉应用需求的完善的开发库。HALCON也包含Blob分析、形态学、模式识别、测量、三维摄像机定标、双目立体视觉等杰出的高级算法。HALCON支持Linux和Windows,并且可以通过C、C++、C#、Visual Basic和Delphi语言访问。另外HALCON与硬件无关,支持大多数图像采集卡及带有DirectShow和IEEE 1394驱动的采集设备,用户可以利用其开放式结构快速开发图像处理和机器视觉应用软件。 一.双目立体视觉相关基本理论介绍
1.1 双目立体视觉原理 双目立体视觉三维测量是基于视差原理,图1所示为简单的平视双目立体成像原理图,两摄像机的投影中心的连线的距离,即基线距为b。摄像机坐标系的原点在摄像机镜头的光心处,坐标系如图1所示。事实上摄像机的成像平面在镜头的光心后,图1中将左右成像平面绘制在镜头的光心前f处,这个虚拟的图像平面坐标系O1uv的u轴和v轴与和摄像机坐标系的x轴和y轴方向一致,这样可以简化计算过程。左右图像坐标系的原点在摄像机光轴与平面的交点O1和O2。空间中某点P在左图像和右图像中相应的坐标分别为P1(u1,v1)和P2(u2,v2)。假定两摄像机的图像在同一个平面上,则点P图像坐标的Y坐标相同,即v1=v2。由三角几何关系得到: 上式中(xc,yc,zc)为点P在左摄像机坐标系中的坐标,b为基线距,f为两个摄像机的焦距,(u1,v1)和(u2,v2)分别为点P在左图像和右图像中的坐标。 视差定义为某一点在两幅图像中相应点的位置差:
计算机双目立体视觉 双目立体视觉技术是仿照人类利用双目线索感知深度信息的方法,实现对三维信息的感知。为解决智能机器人抓取物体、视觉导航、目标跟踪等奠定基础。 双目立体视觉(Binocular Stereo Vision )是机器视觉的一种重要形式,它是基于视差原理并利用成像设备从不同的位置获取被测物体的两幅图像,通过计算图像对应点之间的位置偏差,来获取物体三维几何信息的方法。融合两只眼睛获取的图像并观察它们之间的差别,使我们可以获得明显的深度感,建立特征间的对应关系,将同一空间物理点在不同图像中的映像点对应起来,这个差别,我们称作为视差(Disparity )图像。 双目立体视觉系统 立体视觉系统由左右两部摄像机组成,如图,世界空间中的一点A(X,Y ,Z)在左右摄像机的成 像面1C 和r C 上的像点分别为)(111,v u a 和) (r r r v u a ,。这两个像点是世界空间中同一个对象点A 的像,称为“共轭点”。知道了这两个共轭像点,分别作它们与各自相机的光心1O 和r O 的连线,即投影线11O a 和r r O a ,它们的交点即为世界空间中的对象点A 。这就是立体视觉的基本原理。 双目立体视觉智能视频分析技术 恢复场景的3D 信息是立体视觉研究中最基本的目标,为实现这一目标,一个完整的立体视觉系统通常包含六个模块:图像获取、摄像机标定、特征提取、立体匹配、三维恢复和视频
分析(运动检测、运动跟踪、规则判断、报警处理)。 图像获取(Image Acquisition ) 数字图像的获取是立体视觉的信息来源。常用的立体视觉图像一般为双目图像,有的采用夺目图像。图像的获取方式有很多种,主要有具体运用的场合和目的决定。立体图像的获取不仅要满足应用要求,而且考虑视点差异、光照条件、摄像机的性能和场景特点等方面的影像。 摄像机标定(Camera Calibration ) 图像上每一点的亮度反映了空间物体表面某点反射光的强度,而该点在图像上的位置则与空 间物体表面相应点的几何位置有关。这些位置的相互关系由摄像机成像几何模型来决定。该几何模型的参数称为摄像机参数,这些参数必须由实验与计算来确定,实验与计算的过程称为摄像机定标。 立体视觉系统摄像机标定是指对三维场景中对象点在左右摄像机图像平面上的坐标位置)(111,v u a 和) (r r r v u a ,与其世界空间坐标A (X, Y , Z )之间的映射关系的确立,是实现立体视觉三维模型重构中基本且关键的一步。 特征提取(Feature Acquisition ) 特征提取的目的是获取匹配得以进行的图像特征,图像特征的性质与图像匹配的方法选择有着密切的联系。目前,还没有建立起一种普遍适用的获取图像特征的理论,因此导致了立体视觉研究领域中匹配特征的多样化。像素相位匹配是近二十年才发展起来的一类匹配算法。相位作为匹配基元,本身反映着信号的结构信息,对图像的高频噪声有很好的一直作用,适于并行处理,能获得亚像素级精度的致密视差。但存在相位奇点和相位卷绕的问题,需加入自适应滤波器解决。或者是像素的集合,也可以是它们的抽象表达,如图像的结构、图像的目标和关系结构等。常用的匹配特征主要有点状特征、线装特征和区特征等几种情形。 一般而言,尺度较大的图像特征蕴含较多的图片信息,且特征本身的数目较少,匹配效率高;但特征提取和描述过程存在较大的困难,定位精度也较差。而对于尺度较小的图像特征来说,对其进行表达和描述相对简单,定位的精度高;但由于特征本身数码较多,所包含的图像信息少,在匹配时需要采用较为严格的约束条件和匹配策略,一尽可能的减少匹配歧义和提高匹配效率。总的来说,好的匹配特征应该具有要可区分性、不变性、唯一性以及有效解决匹配歧义的能力。 图像匹配(Image Matching ) 在立体视觉中,图像匹配是指将三维空间中一点A (X, Y , Z )在左右摄像机的成像面1C 和r C 上的像点)(111,v u a 和) (r r r v u a ,对应起来。图像匹配是立体视觉中最重要也是最困难的问题,一直是立体视觉研究的焦点。当空间三维场景经过透视投影(Perspective Projection )变换为二维图像时,同一场景在不同视点的摄像机图像平面上成像会发生不同程度的扭曲和变形,而且场景中的光照条件、被测对象的几何形状和表面特性、噪声干扰和畸变、摄像机特性等诸多因素的影响都被集中体现在单一的图像灰度值中。显然,要包含了如此之多不利因素的图像进行精准的匹配是很不容易的。
西安邮电大学 毕业设计(论文)题目:双目立体视觉中的三维重建 系别:自动化学院 专业:测控技术与仪器 班级:测控0802班 学生姓名:吕海斌(07) 导师姓名:江祥奎职称:讲师 起止时间:2012年3月8日至2012年6月20
诚信声明书 本人声明:我将提交的毕业论文《双目立体视觉中的三维重建》是我在指导教师指导下独立研究、写作的成果,论文中所引用他人的无论以何种方式发布的文字、研究成果,均在论文中加以说明:有关教师、同学和其他人员对本文的写作、修订提出过并为我再论文中加以采纳的意见、建议,均已在我的致谢中加以说明并深致谢意。 论文作者吕海斌时间:2012年6 月7 日 指导教师已阅时间:年月日
西安邮电大学 毕业设计(论文)任务书 学生姓名吕海斌指导教师江祥奎职称讲师 院别自动化学院专业测控0802 题目双目立体视觉中的三维重建 任务与要求 本题目要求在搭建双目立体视觉平台的基础上,通过OpenGL和MATLAB联合编程实现三维重建功能。具体任务分解如下: 1.查找文献,学习和掌握三维重建方法; 2.完成三维重建的MATLAB编程,并对实验数据进行相关分析;3.通过OpenGL,实例编程实现三维重建; 4.通过OpenGL和MATLAB联合编程,完成三维重建; 开始日期2011年12月10日完成日期2012年6月25日 院长(签字) 2012 年12 月日
西安邮电大学 毕业设计 (论文) 工作计划 学生姓名__吕海斌_指导教师__江祥奎__职称__讲师_ 院别____自动化学院____专业____测控0802___ 题目_____ 双目立体视觉中的三维重建 工作进程
密级: NANCHANG UNIVERSITY 学士学位论文 THESIS OF BACHELOR (2013 —2017 年) 题目双目视觉相机标定与立体匹配算法研究学院:信息工程学院系电子系 专业班级:卓越通信131班 学生:婷学号:6102213916 指导教师:其纶职称:讲师 起讫日期:
双目视觉相机标定与立体匹配算法研究 专业:通信工程学号:6102213916 学生:婷指导教师:其纶 摘要 本文基于双目视觉图像传输系统重点研究了摄像机标定与立体匹配两个模块。在摄像机标定中,重点阐述了三大坐标系、两种摄像机模型以及正友平面标定法,基于Matlab实现了立体标定过程并对实验结果进行了分析;在立体标定中,重点阐述了基于全局误差能量最小化立体匹配算法和基于线性生长立体匹配算法的原理,基于Matlab仿真了立体匹配算法的实现过程,并就可靠度与计算量两个指标对两种匹配算法进行了比较分析。 关键词:双目视觉,摄像机标定,立体匹配,正友平面标定,摄像机坐标系三维重建,模板匹配
Binocular vision image transmission system design Abstract Based on the binocular visual image transmission system, this paper focuses on the camera calibration and stereo matching .In the camera calibration, this study was expounded the three coordinates, the two kinds of camera models and ilf plane calibration method, camera calibration was implemented based on Matlab and the experiment results are analyzed; In stereo calibration, this study was expounded the principle of stereo matching algorithm based the global error energy minimization and stereo matching algorithm based on linear growth, and the implementation process of the stereo matching algorithm based on Matlab, and the reliability and the amount of calculation of two indicators of the two matching algorithms are analyzed in comparison. Keyword: Binocular vision, camera calibration, stereo matching, ilf plane calibration, the camera coordinate system of 3 d reconstruction, template matching
双目立体视觉简介 1.什么是视觉 视觉是一个古老的研究课题,同时又是人类观察世界、认知世界的重要功能和手段。人类从外界获得的信息约有75%来自视觉系统,用机器模拟人类的视觉功能是人们多年的梦想。视觉神经生理学,视觉心理学,特别是计算机技术、数字图像处理、计算机图形学、人工智能等学科的发展,为利用计算机实现模拟人类的视觉成为可能。在现代工业自动化生产过程中,计算机视觉正成为一种提高生产效率和检验产品质量的关键技术之一,如机器零件的自动检测、智能机器人控制、生产线的自动监控等;在国防和航天等领域,计算机视觉也具有较重要的意义,如运动目标的自动跟踪与识别、自主车导航及空间机器人的视觉控制等。 人类视觉过程可以看作是一个从感觉到知觉的复杂过程,从狭义上来说视觉的最终目的是要对场景作出对观察者有意义的解释和描述;从广义上说,是根据周围的环境和观察者的意愿,在解释和描述的基础上做出行为规划或行为决策。计算机视觉研究的目的使计算机具有通过二维图像信息来认知三维环境信息的能力,这种能力不仅使机器能感知三维环境中物体的几何信息(如形状、位置、姿态运动等),而且能进一步对它们进行描述、存储、识别与理解,计算机视觉己经发展起一套独立的计算理论与算法。 2.什么是计算机双目立体视觉 双目立体视觉(Binocular Stereo Vision)是机器视觉的一种重要形式,它是基于视差原理并利用成像设备从不同的位置获取被测物体的两幅图像,通过计算图像对应点间的位置偏差,来获取物体三维几何信息的方法。融合两只眼睛获得的图像并观察它们之间的差别,使我们可以获得明显的深度感,建立特征间的对应关系,将同一空间物理点在不同图像中的映像点对应起来,这个差别,我们称作视差(Disparity)图像,如图1。