视觉心理学认为人与被观察物体发生相对运动时,被观察物体表面带光学特征的部位的移动给人们提供了运动和结构的信息。当相机与场景目标间有相对运动时所观察到的亮度模式运动称之为光流(optical flow),或者说物体带光学特征部位的移动投影到视网膜平面(也即图像平面)上就形成了光流。 光流场的计算一般分为四类:基于梯度的方法(Horn-Schunck 和Lucas-Kanade 算法都是基于梯度的算法);基于匹配的方法;基于能量的方法;基于相位的方法。 基于梯度的方法利用图像灰度的梯度来计算光流,是研究最多的方法。基于梯度的方法根据运动前后图像灰度保持不变这个基本假设,导出光流约束方程。由于光流约束方程并不能唯一的确定光流,因此需要导入其他的约束。根据引入的约束不同,基于梯度的方法又可以分为全局约束方法和局部约束方法。全局约束的方法假定光流在整个图像范围内满足一定的约束条件;而局部约束的方法假定在给定点周围的一个小区域内,光流满足一定的约束条件。
基于匹配的方法,这类方法是将速度m v 定义为视差(,)T
dx dy =d ,使得两个时刻的图
像区域的匹配最佳。为了找到最佳匹配,我们可以对定义在d 上的相似度量,如规一化的互相关系数,进行最大化,也可以对某一距离度量,如光强度差的平方和,进行最小化。 基于梯度的光流场算法介绍
梯度光流法又分为全局约束方法和局部约束方法。全局约束方法假定光流在整个图像范围内满足一定的约束条件,而局部约束的方法假定在给定点周围的一个小区域内,光流满足于一定的约束条件。下面先导出光流约束方程。然后给出两种比较典型的基于梯度的方法。 1、光流约束方程
假定图像上点(,)T
x y =m 在时刻t 的灰度值为(,,)I x y t ,经过时间间隔dt 后,对应点的灰度为(,,)I x dx y dy t dt +++,当0dt →时,可以认为两点的灰度不变,也就是:
(,,)(,,)I x dx y dy t dt I x y t +++= (1)
如果图像灰度随,,x y t 缓慢变化,可以将(1)式左边泰勒级数展开:
(,,)(,,)I I I
I x dx y dy t dt I x y t dx dy dt x y t
ε???+++=+
+++??? (2) 其中ε代表二阶无穷小项。由于0dt →,忽略ε,可以得到:
0I I I
dx dy dt x y t
???++=??? (3)
令dx u dt =
,dy v dt =代表,x y 方向上的光流,x I I x ?=?,y I I y ?=?,t I
I t
?=?分别代
表图像灰度相对于,,x y t 的偏导,式(3)可以写成:
0x y t I u I v I ++= (4)
此式即光流场的基本方程。写成向量形式,即:
0m t I ?+=I v (5)
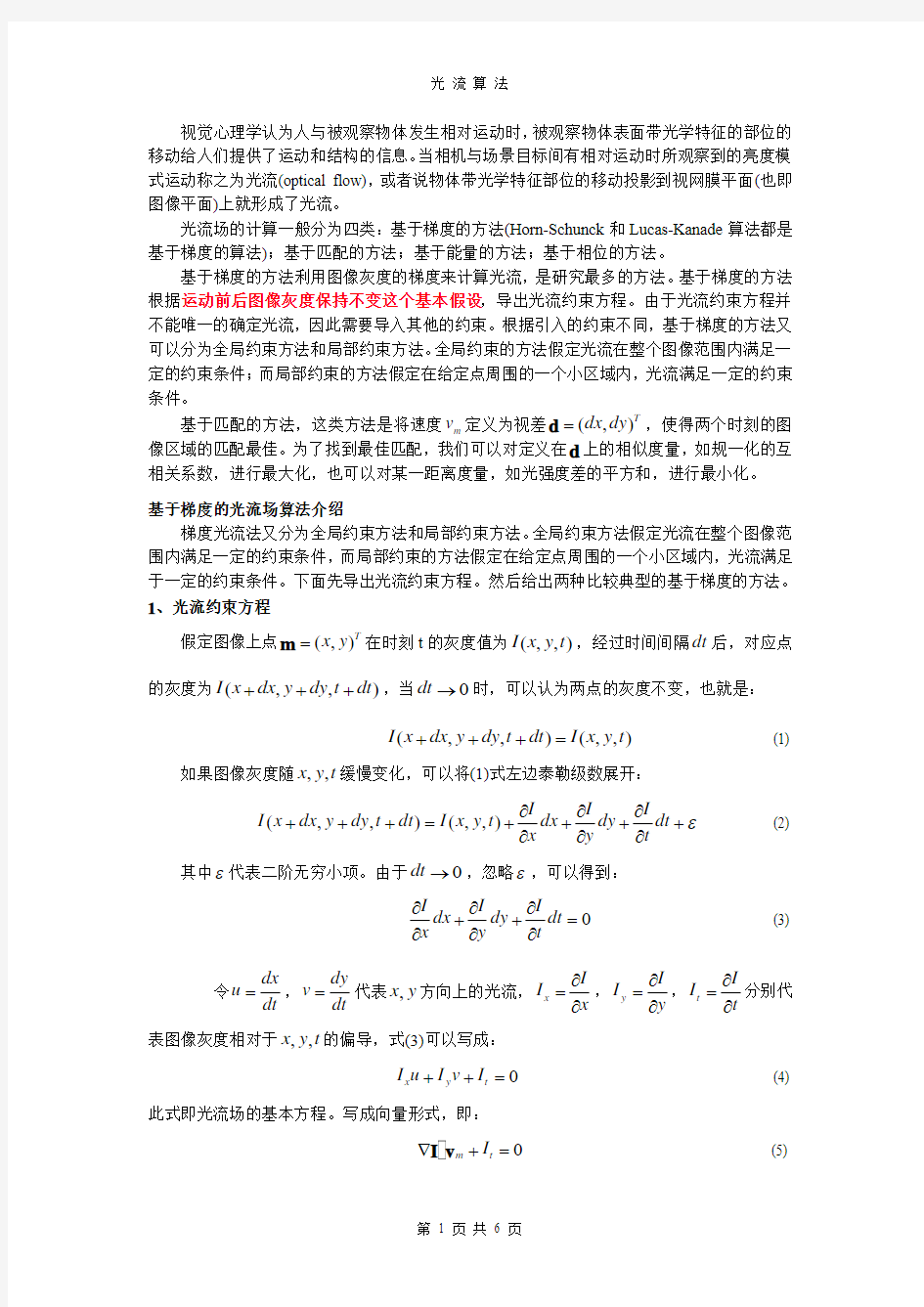
其中(,)x y I I ?=I 是图像在点m 处的梯度,(,)m u v =v 是点m 的光流。上式称为光流约束方程,是所有基于梯度的光流计算方法的基础。
图1 基本等式所确定的约束线
考虑u 和v 组成的二维空间,那么式(5)定义了一条直线,所以满足约束方程的m v 都在
该直线上,图1,该直线和图像梯度?I 垂直,因而仅仅能够解决沿梯度方向的分量,也就是等灰度轮廓的法线分量n s =v n ,其中:
(实际上,式(5)光流约束方程产生的是恒值亮度轮廓图像运动的法向分量n s =v n )
,t I n ?=-
=??I s I I
(6) 光流约束方程包含u 和v 两个未知量,显然由一个方程并不能唯一确定,这就是孔径
问题。为了解决孔径问题,必须找新的约束。 2、Horn-Schunck 算法 光流约束方程不能唯一确定图像光流,需要引入新的约束条件。Horn-Schunck 算法提出了光流的平滑性约束。即:图像上任一点的光流并不是独立的,光流在整个图像范围内平滑变化。因此Horn-Schunck 算法是一种全局约束的方法。 设平滑性约束项为极小化:
()2222
s x y x y E u u v v dxdy =+++?? (7)
由基本等式,显然要求极小化:
()2
c x y t E I u I v I dxdy =++?? (8)
于是,由(7)和(8)式可知,最后求得光流应满足(9)式:
()()22222min x y x y x y t u u v v I u I v I dxdy λ??++++++????
?? (9)
这里λ的取值要考虑图中的噪声情况,如果噪声较强,说明图像数据本身的置信度较
低,需要更多的依赖光流约束,所以λ可以取较大的值;反之,取较小的值。
为了满足(9),可将该式对u 和v 分别求导,并取导数为0。这样就得到:
22x x y x t I u I I v u I I λ+=-?- (10) 22y x y y t I v I I u v I I λ+=-?- (11)
以上两式也称为Euler 方程。如果令u 和v 分别表示u 邻域和v 邻域中的均值(可用图像平
滑算子求得),并令u u u ?=-和v v v ?=-,则式(10)和(11)改写成:
()(),,11,,1,1,11,1,1,,1,,,1,1,1,11
44
t i j k i j k i j k i j k i j k i j k i j k i j k I I I I I I I I I ++++++++++++=
+++-+++()2
22x x y x t I u I I v u I I λλ++=- (12) ()222y
x y y t I
v I I u v I I λλ++=- (13)
从上式解得:
()
222
x x y t x y
I I u I v I u u I I λ++=-
++ (14)
()
2
22y x y t x y
I I u I v I v v I I
λ++=-
++ (15)
式(14)和(15)提供了用迭代法求解u 和v 的基础。实际中,常用松弛迭方程进行求解:
()()(1)
()
2
22k k x y t
k k x
x y
I u I v I u
u
I I I
λ+++=-++ (16)
()()(1)()222
k k x y t
k k y
x y
I u I v I v v I I I λ+++=-++ (17)
其中k 是循环数,(0)
u
和(0)
v
是初始值,可以取为0。u 和v 是局部平均,λ为权重系数,
根据导数求取的精确度确定。 上述迭代过程有一个简单的几何解释,参考图2所示:
图2 用迭代法求解光流的几何解释
在实际求解过程中,需要估计亮度的时间和空间微分。这可在图像点的一个2×2×2立方邻域中估计,如果下标,,i j k 分别对应,,x y t ,那么3个一阶偏导分别是:
()()1,,1,1,1,,11,1,1,,,1,,,1,1,11144x i j k i j k i j k i j k i j k i j k i j k i j k I I I I I I I I I ++++++++++++=
+++-+++ (18) ()(),1,1,1,,1,11,1,1,,1,,,,11,,111
44y i j k i j k i j k i j k i j k i j k i j k i j k I I I I I I I I I ++++++++++++=+++-+++ (19)
()(),,11,,1,1,11,1,1,,1,,,1,1,1,11
44
t i j k i j k i j k i j k i j k i j k i j k i j k I I I I I I I I I ++++++++++++=+++-+++ (20)
也就是用一阶差分来替代灰度I 关于,,x y t 轴的偏导。 上述算法的实现相对简单,计算复杂性较低。但是这种技术存在着严重缺陷。首先,图像灰度保持假设对于许多自然图像序列来讲都是不合适的,尤其是在图像的遮合边缘处和(或)当运动速度较高时,基于灰度保持假设的约束存在较大误差。其次,在图像的遮合区域,速度场是突变的,而总体平滑约束则迫使所估计的光流场平滑地穿过这一区域,此过程平滑掉了有关物体形状的非常重要的信息。第二,微分技术的一个要求是I(x ,y ,t)必须是可微的,这暗示着需对图像数据进行时空域平滑,以避免混叠效应;而且数值微分的求取具有病态性,如果处理不当将对最终的速度估计产生显著影响。(本段内容参考:基于光流场的视频运动检测) 3、Lucas-Kanade 算法 与Horn 方法不同,Lucas-Kanade 方法是基于局部约束的。假定以p 点为中心的一个小区域内各点的光流相同,对区域内不同的点给予不同的权重,这样光流的计算就转化为最小化如下的方程:
()()()2
2,,t x W x x t x t ∈Ω
?+????∑I v I (21) 上式中,Ω代表以p 点为中心的一个小的区域,()W x 为窗函数,代表区域中各点的权重,离p 点越近,权重越高。(21)的解可以由下面的方程得到:
222T =A W Av A W b (22)
对于邻域Ω内的n 个点i m ,其中,
()()()()12,,...,T
n =???A I x I x I x (23)
()()()()12,,...,n diag =W W x W x W x (24) ()()()()12,,...,T
t t t n =-b I x I x I x (25)
最后,方程的解为:
()1
22T T -=v A W A A W b (26)
实际上,2
T A W A 为2×2矩阵:
()()
()()()()()()()()222
22
2
2
x x
y
T
y x y
W x I x W x I x I x W x I x I x W x I x ??
=?????
?
∑∑∑∑A W A (27) 上式中所有的求和都是在Ω的所有点上进行的。 假设2
T
A W A 的特征值为1λ和2λ,并且12λλ≥,则: 1)、如果12,λτλτ>>,则利用(27)计算v;
2)、如果12,λτλτ><,则不能得到光流的完整信息; 3)、如果1λτ<,则认为数据不可靠,不能计算光流。
在Lucas-Kanade 算法的具体实现中,Ω为3×3, 则可以得到一个超定的图像流约束方程:
[][]1291291
2
9.........T
T
T
x x x t t t y y y I I I u v I I I I I I ??=---????
(28)
图像流约束方程实际是速度平面(),u v 上的直线方程,如果考虑图像序列中连续的
J ()2J ≥帧图像,
并假定目标的运动速度在J 帧图像里近似保持不变,对于运动目标而言,其在连续J 帧图像里的J 条运动约束直线,必在速度平面近似交于一点。
为了进一步提高Lucas 一Kanade 方法的准确度以及运算速度,在实际应用中,又将高斯金字塔分层与Lucas 一Kanade 方法结合起来,采用了由粗到精的分层策略将图像分解成不同的分辨率,随着级别的增加,分辨率越来越低,并将在粗尺度下得到的结果作为下一尺度的初始值,在不同的分辨率上对图像序列进行流速计算,这是计算大的运动速度的有效的技术手段。本文试验中采用的高斯金字塔层次L=4。并且在算法中嵌入了一个线性尺度函数。(本段内容参考:基于光流场的视频运动检测)
基于微分法的光流计算方法仅适用于小图像运动的问题,金字塔光流法[17]可以解决此问题。该方法的基本思想是构造图像序列的一个金字塔,较高的层是下层平滑后的下采样形式,原始图像层数等于零。当图像分解到一定的层后,相邻帧间图像运动量将变得足够小,满足光流计算的约束条件,可以直接进行光流估计。在实际计算时,由高层到低层进行,当某一级的光流增量计算出来后,将加到其初始值上,再进行投影重建,作为其下一层的光流计算初值。这一过程不断进行,直至估计出原始图像的光流。(本段参考:基于光流的运动目标检测与跟踪技术2.3.1)
LK 算法堪称一次飞跃,不仅在算法精度上提高了很多,而且提高了运算速度,使光流法可以应用在实时系统中成为可能。通过预测运动值提高了运算精度,它抗噪能力也比较好。(本段内容参考:基于光流场的视频运动检测)
4、Nagel 方法(内容参考:基于光流场的视频运动检测) (论文中不写)
Nagel 方法使用二阶导数(Second-order derivatives)来估计光流[10,11]。和Horn- Schunck 法一样,Nagel 也使用了全局平滑约束来建立光流误差测度函数,与Horn- Schunck 测度函数不同的是,Nagel 提出的一种面向平滑的约束(Oriented-Smoothness Constraint),并不是强加在亮度梯度变化最剧烈的方向(即边缘方向)上,这样做的目的是为了处理遮挡
(ocdusion)问题。该方法的误差测度函数为:
()()()()2
2
2222222
22x y t x y y x x y y x x y x y I u I v I u I u I v I v I u u v v dxdy
I αδδ??+++
-+-++++?
????+??(3.3.22)
相对于(,)T
u v =v 求上式的极小化会削弱垂直梯度方向上的光流变化。Nagel [10]建议取1δ=,0.5α=。
使用Gauss-Seidel 迭代,(3.3.22)的解可表示为:
122
2
1
222
()()()()()()k k
x x y t k k x y k k
y x y t k k
x y I I u I v I u u I I I I u I v I v
v I I ξξξαξξξα++??++??
=-++??++??
=-
++ (3.3.23)
其中,k 表示迭代次数,()k
u ξ和()k
v ξ由下式给出:
()2()()2()
k k T k x y xy k
k
T
k
x y xy u u I I u u v v I I v v ξξ=--?=--?q q (3.3.24)
其中:
22
122yy
xy xx
xy T
xy xx xy yy x y I I I I I I I I I I σ
??-????=?+?? ? ?-++????????
q I W k xy
u 和k
xy v 表示k v 的偏导数的估计,k u 和k v 是k u 和k v 的局部邻域的平均,W 加权矩阵: ()
2
1
2222y x y x
y
x y
x I I I I I I I I δδδ-??
+-=++ ? ?--??
W
(除标注以外的内容 参考:基于改进的光流场算法对运动目标的检测与跟踪技术研究)
摘要 运动目标检测方法是研究如何完成对视频图像序列中感兴趣的运动目标区域的“准确定位”问题。光流场指图像灰度模式的表面运动,它可以反映视频相邻帧之间的运动信息,因而可以用于运动目标的检测。MATLAB这种语言可移植性好、可扩展性强,再加上其中有丰富的图像处理函数,所以利用MATLAB 软件来用光流法对运动目标的检测中具有很大的优势。本设计主要可以借助matlab软件编写程序,运用Horn-Schunck算法对图像前后两帧进行处理,画出图像的光流场。而图像的光流场每个像素都有一个运动矢量,因此可以反映相邻帧之间的运动,分析图像的光流场就可以得出图像中的运动目标的运动情况。 关键字:光流法;Horn-Schunck算法;matlab
目录 1光流法的设计目的 (1) 2光流法的原理 (1) 2.1光流法的介绍 (1) 2.1.1光流与光流场的概念 (1) 2.1光流法检测运动目标的原理 (2) 2.1.1光流场计算的基本原理 (2) 2.2.2基于梯度的光流场算法 (2) 2.2.3Horn-Schunck算法 (3) 2.2.4光流法检测运动目标物体的基本原理概述 (5) 3光流法的程序具体实现 (6) 3.1源代码 (6) 3.1.1求解光流场函数 (6) 3.1.2求导函数 (9) 3.1.3高斯滤波函数 (9) 3.1.4平滑性约束条件函数 (10) 3.1.5画图函数 (10) 4仿真图及分析 (12) 结论 (13) 参考文献 (14)
1 光流法的设计目的 数字图像处理,就是用数字计算机及其他有关数字技术,对图像进行处理,以达到预期的目的。随着计算机的发展,图像处理技术在许多领域得到了广泛应用,数字图像处理已成为电子信息、通信、计算机、自动化、信号处理等专业的重要课程。 数字图像处理课程设计是在学习完数字图像处理的相关理论后,进行的综合性训练课程,其目的是:使学生进一步巩固数字图像处理的基本概念、理论、分析方法和实现方法;增强学生应用Matlab编写数字图像处理的应用程序及分析、解决实际问题的能力;尝试所学的内容解决实际工程问题,培养学生的工程实践能力。 运动目标检测是数字图像处理技术的一个主要部分,近些年来,随着多媒体技术的迅猛发展和计算机性能的不断提高,动态图像处理技术日益受到人们的青睞,并且取得了丰硕的成果,广泛应用于交通管理、军事目标跟踪、生物医学等领域。 因此,基于光流法,实现运动目标的检测是本文的研究对象。结合图书馆书籍、网上资料以及现有期刊杂志,初步建立起运动目标检测的整体思路和方法。 2 光流法的原理 2.1 光流法的介绍 2.1.1 光流与光流场的概念 光流是指空间运动物体在观测成像面上的像素运动的瞬时速度,它利用图像序列像素强度数据的时域变化和相关性来确定各自像素位置的“运动”,即反映图像灰度在时间上的变化与景物中物体结构及其运动的关系。将二维图像平面特定坐标点上的灰度瞬时变化率定义为光流矢量。视觉心理学认为人与被观察物体
研究生课程论文 《光流法运动目标跟踪》 课程名称s 姓名 学号 专业 任课教师 教师评阅意见: 论文成绩评阅日期 课程论文提交时间:年月日
摘要本文实现了对运动目标的跟踪检测,重点研究金字塔Lucas-Kanade算法,在研究基于特征点的目标跟踪的一般方法,即采用改进的Harris角点提取点的方法。实验结果表明先采用Shi-Tomasi算法比Harris算法提取角点效果更好,之后用金字塔光流进行跟踪。 关键词运动目标跟踪Lucas-Kanade Shi-Tomasi 改进Harris 1.引言 近些年,模式识别领域的图像处理已经成为一个支柱,其中,动态目标的识别跟踪已经被研究者应用到工程上,而运动目标跟踪算法的优劣直接影响着运动目标跟踪的稳定性和精确性。本文主要是运动光流法等算法对运动目标进行跟踪。目标特征点的跟踪是计算机视觉中的一个基本而极具挑战性的研究课题,该课题在人机互动(HCI),目标识别,目标运动等领域有着非常重要的应用。虽然对运动目标跟踪算法能够完成对运动目标的可靠跟踪,大多数都存在处理数据量大,运算复杂等问题。因此,研究具有高精度且运算简单的目标检测与跟踪算法是图形跟踪迫切需要解决的问题,目前基于特征和光流的图像跟踪方法受到了极大的关注。 2.运动目标检测算法 运动目标检测技术是目标自动检测、识别与跟踪的基础,也是实现进一步处理视频编码、目标跟踪、目标分类及行为理解等的关键技术。基于视频或序列图像的分析一般可分为四个步骤:(1)运动目标的检测与提取,(2)运动目标的分类,(3)运动目标的跟踪,(4)运动目标的行为理解与分析,如图1所示。 图像序列运动检测目标分类目标跟踪行为理解 图1 分析过程 在计算机视觉处理中,运动目标检测技术处于中层处理级别,它是指在一个视频或者图像中,对需要研究的并且是处于运动状态的目标和背景进行分离,对于行为理解,行为分析等其他技术的研究,运动目标检测也是一种有效的方法。 目标检测要依据运动目标的主要特性,例如时间特性、边缘形状特性、颜色灰度特性、矢量特性等等。时间特性、区域作为视频序列时间差分和图像分割的基础,是运动目标最基本的特性。目标运动时在形状、大小、刚度等方面的差异称为形态特征,利用形态特征对运动目标检测,难点是对小目标的检测。 3.光流法 1950年,Gibuson首先提出了光流的概念,所谓光流就是指图像表现运动的速度。物体在运动的时候之所以能被人眼发现,就是因为当物理运动时,会在人的视网膜上形成一系列的连续变化的图像,这些变化信息在不同时间,不断的流过眼睛视网膜,就好像一种光流过一
视频图像中运动目标检测方法研究
毕业论文 题目视频图像中运动目标检测 方法研究
摘要 在很多现代化领域,运动目标检测都显示出了其重要的作用。尤其是近二十年的社会经济的飞速发展,运动目标检测都彰显了其重要性,在航空、通信、航海等各个方面都有关键性的作用,从而使运动目标检测方法的研究成为各国的研究热门课题。 通过阅读大量的相关论文、期刊及其网络资源,了解了高斯背景建模及背景更新的基本原理及思想。在本文中,首先介绍了运动目标检测方法的相关基础知识,如图像的二值化、图像的形态学处理、颜色空间模型。然后重点说明了三种常用的运动目标检测方法的研究,简要阐述了三种研究方法的基本思想。在老师的帮助下进行了相应的实验,最终得出了三种运动目标检测方法的优点和缺点,着重探究了高斯背景建模及其背景更新基本原理及思想。 最后,通过相关的程序及软件对混合高斯背景模型进行了相关的实验,进而发现了混合高斯背景建模算法存在的不足之处,如:高斯背景建模的计算量大、运动目标较大时检测效果差等问题,并对对这些问题提出了相关设想及改进。 关键词:运动目标检测;二值化;图像的形态学处理;高斯背景建模;背景更新 I
ABSTRACT In many modern fields, moving target detection are showing its important role. Especially nearly twenty years of rapid development of social economy, the moving target detection has shown its importance, in various aviation, communication, navigation and so on have a key role, so the study of moving target detection method has become a research hot topic in countries. By reading relevant papers, a large number of journals and cyber source, understand the basic principle and thought of Gauss background modeling and updating the background. In this paper, firstly introduces the basic knowledge of moving target detection method, such as the two values image, morphological image processing, color space model. Then focus on the study of three methods used for moving object detection, a brief description of the basic ideas of the three kinds of research methods. By the experiment, the results of three kinds of method of moving target detection has advantages and disadvantages, this paper emphatically explores Gauss background modeling and background updating basic principle and thought. Finally, through the program and software related to mixed Gauss background model for the relevant experiments, and found the shortcomings, the presence of mixed Gauss background modeling algorithm such as: the problem of computing Gauss background modeling, moving target volume larger detection effect is poor, and on these problems put forward relevant ideas and improvement. Keywords: moving object detection; two values; I I
它是一种运动模式,这种运动模式指的是一个物体、表面、边缘在一个视角下由一个观察者(比如眼睛、摄像头等)和背景之间形成的明显移动。光流技术,如运动检测和图像分割,时间碰撞,运动补偿编码,三维立体视差,都是利用了这种边缘或表面运动的技术。 光流的概念:(Optical flow or optic flow)二维图像的移动相对于观察者而言是三维物体移动的在图像平面的投影。 有序的图像可以估计出二维图像的瞬时图像速率或离散图像转移。 光流算法: 它评估了两幅图像的之间的变形,它的基本假设是体素和图像像素守恒。它假设一个物体的颜色在前后两帧没有巨大而明显的变化。基于这个思路,我们可以得到图像约束方程。不同的光流算法解决了假定了不同附加条件的光流问题。 Lucas–Kanade算法: 这个算法是最常见,最流行的。它计算两帧在时间t 到t + δt之间每个每个像素点位置的移动。由于它是基于图像信号的泰勒级数,这种方法称为差分,这就是对于空间和时间坐标使用偏导数。 图像约束方程可以写为I(x,y,z,t) = I(x+ δx,y+ δy,z+ δz,t+ δt) I(x, y,z, t)为在(x,y,z)位置的体素。 我们假设移动足够的小,那么对图像约束方程使用泰勒公式,我们可以
得到: H.O.T. 指更高阶,在移动足够小的情况下可以忽略。从这个方程中我们可以得到: 或者 我们得到: V x,V y,V z分别是I(x,y,z,t)的光流向量中x,y,z的组成。, , 和则是图像在(x,y,z,t)这一点向相应方向的差分。 所以 I x V x + I y V y + I z V z= ?I t。 写做: 这个方程有三个未知量,尚不能被解决,这也就是所谓光流算法的光圈问题。那么要找到光流向量则需要另一套解决的方案。而Lucas-Kanade算法是一个非迭代的算法: 假设流(Vx,Vy,Vz)在一个大小为m*m*m(m>1)的小窗中是一个常数,那么从像素 1...n, n = m3中可以得到下列一组方程: 三个未知数但是有多于三个的方程,这个方程组自然是个超定方程,也就是说方程组内有冗余,方程组可以表示为:
光流的概念是Gibson于1950年首先提出的。所谓光流是指图像中模式运动的速 。1981年,Horn等人在相邻图像间的时间间隔很小,并且图像灰度变化也很小的 提下,推导出灰度图像光流场计算的基本等式,这是经典光流方法[18,24]。 光流的算法多种多样,其用于目标跟踪常用的算法有:检测和跟踪特征点[25]、跟 好的特征点[26]、金字塔图像的Lucas Kanade特征点跟踪算法(因为其跟踪过程是迭 的光流法计算过程,因此,为了更好的体现光流的作用,本文将其简称为:Lucas nad光流法)[27]。在这三种光流跟踪方法中,跟踪性能最优的是Lucas Kanade光流 –26–第四章目标跟踪 法,由于该算法仅跟踪少量的特征点、迭代法收敛速度也很快而且算法的计算量不大, 已被广泛的应用于运动车辆跟踪和人脸特征点跟踪[47,48];下面介绍文献[27],并对其 进行相关实验。 §4.3.1问题提出 用I和J来代表两个灰度图像。那么I(x)=I(x,y)和J(x)=J(x,y)代表了这两个灰度图 像在点X=[x,y]T的灰度值,x和y是图像的点X坐标。称图像I为第一幅图像,称J为 第二幅图像。从实际的图像来说,I和J是两个离散的函数,并且左上角的像素点坐标 是[0,0]T。用nx和ny表示图像的宽度和高度,右下端图像的坐标是[nx?1,ny?1]T。 考虑第一幅图像I(X)=I(x,y)上的一点,跟踪的目的就是在第二幅图像J(X)= J(x,y)上找到与之相对应的一点,d=[d x ,d y ] T 是在点X处图像的速度,即点X处图像的 光流。令ωx和ωy表示两个整数,假定图像速度d是使得下面的残差函数ε最小的函数:ε(d)=ε(dx,dy)= ux+ωx x=ux?ωx uy+ωy y=uy?ωy (I(x,y)?J(x+dx,y+dy)) 2 (4-3-5) 根据上面的定义,相似度的函数被在(2ωx+1,2ωy+1)的区域内定义。这个区域也 称之为积分窗口。典型的ωx、ωy是2、3、4、5、6、7个像素。 §4.3.2跟踪算法描述 基于特征点的跟踪的两个关键问题是准确度和鲁棒性。准确度是从直觉上来说, 为了不抹去图像中的细节,需要小的积分窗口。鲁棒性因素需要考虑光照变化,图像 运动时对尺寸变化的敏感性。特别的,为了了解大矢量运动的问题需要一个大的积分 窗口。实际上,仅仅考虑等式(4-3-5),理想的情况是dx<ωx,dy<ωy。这样我们就必 须兼顾准确度和鲁棒性来选择积分窗口。为了更好的解决这个问题,采用了基于金字 塔图像的光流跟踪方法。这个方法对局部跟踪的准确性提出了一个很好的解决方案。 一、金字塔图像表示 描述一个nx×ny的图像I,令I0=I表示第0层图像(原始图像),那么金字塔图
运动目标检测之Lucas-Kanade光流算法读书笔记 视觉是人类感知自身周围复杂环境最直接有效的手段之一,而在现实生活中大量有意义的视觉信息都包含在运动中,人眼对运动的物体和目标也更敏感,能够快速的发现运动目标。随着计算机技术、通信技术、图像处理技术的不断发展,计算机视觉己成为目前的热点研究问题之一。而运动目标检测是计算机视觉研究的核心课题之一,融合了图像处理、模式识别、人工智能、自动控制、计算机等众多领域的先进技术,在军事制导、视觉导航、视频监控、智能交通、医疗诊断、工业产品检测等方面有着重要的实用价值和广阔的发展前景。 一目标检测 运动目标检测运动目标检测是指从序列图像中将运动的前景目标从背景图像中提取出来。目前,已有的运动目标检测方法按照算法的基本原理可以分为三类:背景差分法,帧间差分法和光流法。 1背景差分法 背景差分法又称背景减除法,背景差分法的原理是将当前帧与背景图像进行差分来得到运动目标区域,但是需要构建一幅背景图像,这幅背景图像必须不含运动目标,并且应该能不断的更新来适应当前背景的变化,构建背景图像的方法有很多,比较常用的有基于单个高斯模型的背景构建,基于混合高斯模型的背景构建,基于中值滤波器的背景构造,基于卡尔曼滤波器的背景构造,基于核函数密度估计的背景模型构造。 缺点:因为要求背景是静止的,所以背景的变化,场景中有很多干扰,比如场景中有树枝和叶子在风中晃动、水面的波动等等,还有照明的变化和天气的变化等都可能影响检测的结果 2帧间差分法 帧间差分法是一种通过对视频图像序列中相邻两帧作差分运算来获得运动目标轮廓的方法,它可以很好地适用于存在多个运动目标和摄像机移动的情况。当监控场景中出现异常物体运动时,帧与帧之间会出现较为明显的差别,两帧相减,得到两帧图像亮度差的绝对值,
运动目标检测之Lucas-Kanade 光流算法读书笔记 视觉是人类感知自身周围复杂环境最直接有效的手段之一,而在现实生活中大量有意义的视觉信息都包含在运动中,人眼对运动的物体和目标也更敏感,能够快速的发现运动目标。随着计算机技术、通信技术、图像处理技术的不断发展,计算机视觉己成为目前的热 点研究问题之一。而运动目标检测是计算机视觉研究的核心课题之一,融合了图像处理、模式识别、人工智能、自动控制、计算机等众多领域的先进技术,在军事制导、视觉导航、视频监控、智能交通、医疗诊断、工业产品检测等方面有着重要的实用价值和广阔的发展 前景。 一目标检测 运动目标检测运动目标检测是指从序列图像中将运动的前景目标从背景图像中提取出 来。目前,已有的运动目标检测方法按照算法的基本原理可以分为三类:背景差分法,帧间差 分法和光流法。 1 背景差分法 背景差分法又称背景减除法,背景差分法的原理是将当前帧与背景图像进行差分来得到 运动目标区域,但是需要构建一幅背景图像,这幅背景图像必须不含运动目标,并且应该能不断的更新来适应当前背景的变化,构建背景图像的方法有很多,比较常用的有基于单个高 斯模型的背景构建,基于混合高斯模型的背景构建,基于中值滤波器的背景构造,基于卡尔曼滤波器的背景构造,基于核函数密度估计的背景模型构造。 缺点:因为要求背景是静止的,所以背景的变化,场景中有很多干扰,比如场景中 有树枝和叶子在风中晃动、水面的波动等等,还有照明的变化和天气的变化等都可能影响检 测的结果 2 帧间差分法 帧间差分法是一种通过对视频图像序列中相邻两帧作差分运算来获得运动目标轮廓的 方法,它可以很好地适用于存在多个运动目标和摄像机移动的情况。当监控场景中出现异常 物体运动时,帧与帧之间会出现较为明显的差别,两帧相减,得到两帧图像亮度差的绝对值,
邮局订阅号:82-946120元/年技术创新 软件时空 《PLC 技术应用200例》 您的论文得到两院院士关注 基于光流的运动目标检测跟踪快速算法 The Fast Algorithm Based on Optical Flow for Tracking Moving Targets (装甲兵工程学院) 关兴来谢晓竹 GUAN Xing-lai XIE Xiao-zhu 摘要:采用光流算法对运动目标进行识别跟踪,其优点是能够适应复杂的背景条件,并且能保证目标分割的完整性,但现有的按照光流矢量对目标进行跟踪的算法有明显的局限性:运算量过大,并且不适用与运动特征复杂的目标。对现有算法进行改进,采用均值平滑算法和基于光流绝对值的区域分割算法,可以有效解决这两个问题。关键词:光流;运动目标;图像分割中图分类号:TP391.4文献标识码:A Abstract:Using optical flow algorithm for identification and tracking moving targets,the advantage is the ability to adapt to the com -plex background conditions,and can ensure the integrity of the target partition,but the existing target tracking algorithm based on op -tical flow vector has obvious limitations:excessive operation,and does not apply and movement characteristics of complex targets.Im -provements to existing algorithms,using the pyramid optical flow-based smoothing algorithm and the absolute value of the region seg -mentation algorithm can effectively solve these two problems.Key word:Optical flow;Kinetic target;Image segmentation 文章编号:1008-0570(2012)10-0421-03 图像序列中的运动目标检测跟踪是指在图像序列中将前景运动区域从背景中提取出来。图像序列中检测运动目标,主要有图像差分法(帧间差分和背景差分)、光流场的方法、统计模型的方法、运动能量的方法、小波变换的方法等。其中,光流场的方法是利用运动物体随时间变化在图像中表现为速度场的特性,根据一定的约束条件估算出运动所对应的光流,然后根据光流矢量对图像中的目标进行检测,将目标从背景中分割出来。与其它方法相比它的优点是可以避免分割目标不完整的情况,因此得到越来越广泛的应用。 但现有的基于光流算法同样存在以下缺陷: 一是求稠密光流算法过于复杂。图像金字塔法的计算过程过于复杂,求出图像的金字塔的计算量非常大,而且对金字塔的每层图像均需要重新求其光流值。因此,这种经典的求稠密光流的方法运算时间过长,实时性较差。 二是不能适用于特征复杂的运动目标。例如:一个人在走路时,其身体各个部位的光流矢量值是不同的。对此类目标,如果仅仅根据光流矢量判断分割目标,很容易出现错误分割的情况。 1基于光流的运动目标跟踪原理 基于光流的运动目标的检测跟踪流程包括求取稀疏光流,求取稠密光流和目标的分割标识等几个步骤。 目前,最常用的计算运动目标稀疏光流的算法是H-S 算法,此理论的前提是:运动目标的灰度在很短的间隔时间内保持不变;给定邻域内的速度向量场变化是缓慢的。算法具体原理如下: 首先是建立基本的光流约束方程,求稀疏光流。令 为时刻t 图像点(x,y)的灰度,u(x,y)和v(x,y)表示图像点(x,y)的水平和垂直移动速度,则可建立光流方程: (1) 其中,Jx 、Jy 和Jt 分别表示图像中像素灰度沿X,Y,T 方向的梯度。 由于给定邻域内的速度向量场变化是缓慢的,可利用这个条件来建立下面两个光流约束方程,即: (2)(3) HS 算法是将这两个方程与光流方程结合,通过解最小化问题得出下面两个迭代公式: (4)(5) 上面公式(4)(5),就是H-S 法求光流的迭代公式,一般情况下,需要迭代20次以上,才能求出精度较高的光流值。 通过H-S 算法计算的光流仅仅是稀疏光流,为了将整个目标的完整轮廓描绘出来,需要计算出目标的稠密光流。求稠密光流可采用图像金字塔法:图像金字塔是一系列以金字塔形状排列的分辨率逐步降低的图像集合。先使用金字塔上较低的分辨率图像来求其光流值,然后再逐步求较高分辨率的光流。在计算出稠密光流后,就可以将目标从背景中分割出来,实现对目标的检测和跟踪。 2对基于光流的目标跟踪算法的改 进 上面的算法存在计算复杂和无法跟踪复杂运动状态目标这两个缺陷,可通过对算法进行改进解决这两个问题。改进的思想是,不再将光流矢量做为分割目标的特征,而是将光流取绝对值,根据光流绝对值值的大小,按照基于区域分割的原理,设置相应的阈值,对运动目标进行分割,然后使用均值平滑算法,求出运 关兴来:工程师硕士研究生 421--
帧差法、光流法、背景减除法 运动目标检测是指在序列图像中检测出变化区域并将运动目标从背景图像中提取出来。通常情况下,目标分类、跟踪和行为理解等后处理过程仅仅考虑图像中对应于运动目标的像素区域,因此运动目标的正确检测与分割对于后期处理非常重要然而,由于场景的动态变化,如天气、光照、阴影及杂乱背景干扰等的影响,使得运动目标的检测与分割变得相当困难。根据摄像头是否保持静止,运动检测分为静态背景和运运动目标检测是指在序列图像中检测出变化区域并将运动目标从背景图像中提取出来。通常情况下,目标分类、跟踪和行为理解等后处理过程仅仅考虑图像中对应于运动目标的像素区域,因此运动目标的正确检测与分割对于后期处理非常重要然而,由于场景的动态变化,如天气、光照、阴影及杂乱背景干扰等的影响,使得运动目标的检测与分割变得相当困难。根据摄像头是否保持静止,运动检测分为静态背景和运动背景两类。大多数视频监控系统是摄像头固定的,因此静态背景下运动目标检测算法受到广泛关注,常用的方法有帧差法、光流法、背景减除法等。 (l)帧差法 帧差法是最为常用的运动目标检测和分割方法之一,基本原理就是在图像序列相邻两帧或三帧间采用基于像素的时间差分通过闭值化来提取出图像中的运动区域。首先,将相邻帧图像对应像素值相减得到差分图像,然后对差分图像二值化,在环境亮度变化不大的情况下,如果对应像素值变化小于事先确定的阂值时,可以认为此处为背景像素:如果图像区域的像素值变化很大,可以认为这是由于图像中运动物体引起的,将这些区域标记为前景像素,利用标记的像素区域可以确定运动目标在图像中的位置。由于相邻两帧间的时间间隔非常短,用前一帧图像作为当前帧的背景模型具有较好的实时性,其背景不积累,且更新速度快、算法简单、计算量小。算法的不足在于对环境噪声较为敏感,闽值的选择相当关键,选择过低不足以抑制图像中的噪声,过高则忽略了图像中有用的变化。对于比较大的、颜色一致的运动目标,有可能在目标内部产生空洞,无法完整地提取运动目标。 (2)光流法 光流法的主要任务就是计算光流场,即在适当的平滑性约束条件下,根据图像序列的时空梯度估算运动场,通过分析运动场的变化对运动目标和场景进行检测与分割。通常有基于全局光流场和特征点光流场两种方法。最经典的全局光流场计算方法是L-K(Lueas&Kanada)法和H-S(Hom&Schunck)法,得到全局光流场后通过比较运动目标与背景之间的运动差异对运动目标进行光流分割,缺点是计算量大。特征点光流法通过特征匹配求特征点处的流速,具有计算量小、快速灵活的特点,但稀疏的光流场很难精确地提取运动目标的形状。总的来说,光流法不需要预先知道场景的任何信息,就能够检测到运动对象,可处理背景运动的情况,但噪声、多光源、阴影和遮挡等因素会对光流场分布的计算结果造成严重影响;而且光流法计算复杂,很难实现实时处理。 (3)背景减除法 背景减除法是一种有效的运动对象检测算法,基本思想是利用背景的参数模型来近似背景图像的像素值,将当前帧与背景图像进行差分比较实现对运动区域的检测,其中区别较大的像素区域被认为是运动区域,而区别较小的像素区域被认为是背景区域。背景减除法必须要有背景图像,并且背景图像必须是随着光照或外部环境的变化而实时更新的,因此背景减除法的关键是背景建模及其更新。针对如何建立对于不同场景的动态变化均具有自适应性的背景模型,减少动态场景变化对运动分割的影响,研究人员已提出了许多背景建模算法,但总的来讲可以概括为非回归递推和回归递推两类。非回归背景建模算法是动态的利用从某一时刻开始到当前一段时间内存储的新近观测数据作为样本来进行背景建模。非回归背景建模方法有最简单的帧间差分、中值滤波方法、Toyama等利用缓存的样本像素来估计背景模型
运动目标检测光流法文件编码(008-TTIG-UTITD-GKBTT-PUUTI-WYTUI-8256)
摘要运动目标检测方法是研究如何完成对视频图像序列中感兴趣的运动目标区域的“准确定位”问题。光流场指图像灰度模式的表面运动,它可以反映视频相邻帧之间的运动信息,因而可以用于运动目标的检测。MATLAB这种语言可移植性好、可扩展性强,再加上其中有丰富的图像处理函数,所以利用MATLAB软件来用光流法对运动目标的检测中具有很大的优势。本设计主要可以借助matlab软件编写程序,运用Horn-Schunck 算法对图像前后两帧进行处理,画出图像的光流场。而图像的光流场每个像素都有一个运动矢量,因此可以反映相邻帧之间的运动,分析图像的光流场就可以得出图像中的运动目标的运动情况。 关键字:光流法;Horn-Schunck算法;matlab 目录
1 光流法的设计目的 数字图像处理,就是用数字计算机及其他有关数字技术,对图像进行处理,以达到预期的目的。随着计算机的发展,图像处理技术在许多领域得到了广泛应用,数字图像处理已成为电子信息、通信、计算机、自动化、信号处理等专业的重要课程。 数字图像处理课程设计是在学习完数字图像处理的相关理论后,进行的综合性训练课程,其目的是:使学生进一步巩固数字图像处理的基本概念、理论、分析方法和实现方法;增强学生应用Matlab编写数字图像处理的应用程序及分析、解决实际问题的能力;尝试所学的内容解决实际工程问题,培养学生的工程实践能力。 运动目标检测是数字图像处理技术的一个主要部分,近些年来,随着多媒体技术的迅猛发展和计算机性能的不断提高,动态图像处理技术日益受到人们的青睐,并且取得了丰硕的成果,广泛应用于交通管理、军事目标跟踪、生物医学等领域。 因此,基于光流法,实现运动目标的检测是本文的研究对象。结合图书馆书籍、网上资料以及现有期刊杂志,初步建立起运动目标检测的整体思路和方法。 2 光流法的原理 光流法的介绍 光流与光流场的概念 光流是指空间运动物体在观测成像面上的像素运动的瞬时速度,它利用图像序列像素强度数据的时域变化和相关性来确定各自像素位置的“运动”,即反映图像灰度在时间上的变化与景物中物体结构及其运动的关系。将二维图像平面特定坐标点上的灰度瞬时变化率定义为光流矢量。视觉心理学认为人与被观察物体发生相对运动时,被观察物体表面
Artificial Intelligence and Robotics Research 人工智能与机器人研究, 2017, 6(1), 9-15 Published Online February 2017 in Hans. https://www.doczj.com/doc/2c11186176.html,/journal/airr https://https://www.doczj.com/doc/2c11186176.html,/10.12677/airr.2017.61002 文章引用: 邵晓芳, 叶灵伟, 李大龙. 基于光流的运动图像分析研究进展[J]. 人工智能与机器人研究, 2017, 6(1): 9-15. A Survey of Motion Estimation Based on Optical Flow Xiaofang Shao, Lingwei Ye, Dalong Li QingDao Branch of Naval Aeronautical Engineering Institute, Qingdao Shandong Received: Dec. 30th , 2016; accepted: Jan. 13th , 2017; published: Jan. 18th , 2017 Abstract Motion estimation is one of the key technologies for solving many machine vision problems such as object tracking and video compression. Starting from the description and resolution of optical flow, this paper gives a comprehensive presentation and analysis on the motion estimation prob-lem and previous works. At last, future research directions are suggested and some good network resources are recommended. Keywords Optical Flow, Motion Estimation, Restriction Conditions of Optical Flow 基于光流的运动图像分析研究进展 邵晓芳,叶灵伟,李大龙 海军航空工程学院青岛校区,山东 青岛 收稿日期:2016年12月30日;录用日期:2017年1月13日;发布日期:2017年1月18日 摘 要 基于光流的运动图像分析是解决目标跟踪、视频压缩等许多机器视觉问题的关键技术之一。从光流场的含义和求解思路入手,对运动图像分析问题和现有研究工作进行了较为全面的描述和分析,最后展望了未来的研究方向,并推荐一些比较好的网络资源。 关键词 光流场,运动估计,光流约束条件
光流的概念是Gibson在1950年首先提出来的。它是空间运动物体在观察成像平面上的像素运动的瞬时速度,是利用图像序列中像素在时间域上的变化以及相邻帧之间的相关性来找到上一帧跟当前帧之间存在的对应关系,从而计算出相邻帧之间物体的运动信息的一种方法。一般而言,光流是由于场景中前景目标本身的移动、相机的运动,或者两者的共同运动所产生的。其计算方法可以分为三类:(1)基于区域或者基于特征的匹配方法; (2)基于频域的方法; (3)基于梯度的方法; 简单来说,光流是空间运动物体在观测成像平面上的像素运动的“瞬时速度”。光流的研究是利用图像序列中的像素强度数据的时域变化和相关性来确定各自像素位置的“运动”。研究光流场的目的就是为了从图片序列中近似得到不能直接得到的运动场。 光流法的前提假设: (1)相邻帧之间的亮度恒定; (2)相邻视频帧的取帧时间连续,或者,相邻帧之间物体的运动比较“微小”;(3)保持空间一致性;即,同一子图像的像素点具有相同的运动 这里有两个概念需要解释: 运动场,其实就是物体在三维真实世界中的运动; 光流场,是运动场在二维图像平面上的投影。
如上图所示,H中的像素点(x,y)在I中的移动到了(x+u,y+v)的位置,偏移量为(u,v)。 光流法用于目标检测的原理:给图像中的每个像素点赋予一个速度矢量,这样就形成了一个运动矢量场。在某一特定时刻,图像上的点与三维物体上的点一一对应,这种对应关系可以通过投影来计算得到。根据各个像素点的速度矢量特征,可以对图像进行动态分析。如果图像中没有运动目标,则光流矢量在整个图像区域是连续变化的。当图像中有运动物体时,目
摘要 由于计算机技术的迅猛发展,使得基于内容的视频信息的存取、操作和检索不仅成为一种可能,更成为一种需要。同时,基于内容的视频编码标准MPEG-4和基于内容的视频描述标准MPEG-7正在发展和完善。因此提取和视频中具有语义的运动目标是一个急需解决的问题。运动目标提取和检测作为视频和图像处理领域的重要研究领域,有很强的研究和应用价值。运动检测就是将运动目标从含有背景的图像中分离出来,如果仅仅依靠一种检测算法,难以从复杂的自然图像序列中完整地检测出运动的目标。较高的检测精度和效率十分重要,因此融合多种检测方法的研究越来越受到重视。本文介绍了几种国内外文献中的经典的视频运动目标的检测和提取算法,并对各种方法进行了评价和总结。首先介绍了基本的运动目标检测的基本知识和理论,然后介绍了基本的几种目标检测方法及其各种改进方法。对今后的运动目标检测提取的相关研究提供一定的参考。 关键词:运动目标检测光流法帧差法背景建模方法
摘要i ABSTRACT Because of the rapid development of computer technology, it is possible to access, operate and retrieve the video information based on the content of the video. At the same time, based on the content of the video coding standard MPEG-4 and content-based video description standard MPEG-7 is developing and improving. Therefore, it is an urgent problem to be solved in the extraction and video. Moving object extraction and detection is a very important field of video and image processing, and has a strong research and application value. Motion detection is to separate moving objects from the image containing background, if only rely on a detection algorithm, it is difficult to from a complex natural image sequences to detect moving target. Higher detection accuracy and efficiency are very important, so the study of the fusion of multiple detection methods is becoming more and more important. In this paper, the detection and extraction algorithms of the classical video moving objects in the domestic and foreign literatures are introduced, and the methods are evaluated and summarized. Firstly, the basic knowledge and theory of basic moving target detection is introduced, and then the basic method of target detection is introduced. To provide a reference for the research on the extraction of moving target detection in the future. Keywords: Visual tracking Optical flow method Frame Difference Background modeling method
本科毕业设计(论文)开题报告 题目:基于帧间差分法的目标运动检测算法 Frame difference method based on target motion detection algorithm 课题类型:设计□实验研究□论文□ 学生姓名:郭凯 学号: 3100701135 专业班级:计算机101 学院:计算机科学与技术 指导教师:卢桂馥 开题时间: 201年月日
开题报告内容与要求 一、本课题的研究意义、研究现状和发展趋势(文 献综述) 1.1研究意义 在人们感知到的环境信息中,视觉信息占了很大的比重,其中动态视觉信息更是其主要组成部分。感知环境中的这些动态视觉信息己成为计算机视觉的一个重要的研究方向。在现实生活中,大量有意义的视觉信息都包含于运动之中。尽管人类视觉既能看见运动又能看见静止的物体,但是在许多场合,比如航空和军用飞机的制导、交通流量的监测、重要场所的保安以及汽车的自动驾驶和辅助驾驶等等,人们往往对运动的物体更感兴趣。 运动目标检测与跟踪是近些年来图像处理和计算机视觉领域的一个非常活跃的分支,是动态图像分析的基础。目标的运动图像序列提供了比目标静止时更多的有用信息,使得我们可以利用运动目标检测与跟踪技术获得比静止图像更有实用价值的信息。 运动目标检测和运动目标跟踪两方面具有非常紧密的关系。做为运动目标跟踪的基础,运动目标检测是实时的在被监视的场景中检测运动目标,并将其提取出来。而运动目标跟踪是做为衔接运动目标检测和上层的目标行为分析和理解的一个重要环节。所谓运动目标跟踪,就是在运动目标检测的基础上,利用目标有效特征,使用适当的匹配算法,在序列图像中寻找与目标模板最相似的图像的位置,简单的说就是给目标定位。在实际应用中,运动目标跟踪不仅可以提供目标的运动轨迹和准确定位目标,为下一步的目标行为分析与理解提供了可靠的数据来源,而且也可以为运动目标检测提供帮助。 综上,对运动目标检测与跟踪有关算法的研究具有重大的理论价值和现实意义。 1.2研究现状和发展趋势 1.2.1研究现状 近些年来,世界各地的学者们针对视频图像中的运动目标检测 与跟踪问题做了大量而深入的研究,提出了许多行之有效的方法,也取得了一定的进展,但到目前为止,还没有出现能够适用于各 种场合、各种情况的通用算法。现今的各种算法在稳健性、准确性、可靠性等方面还有着这样、那样的不足。困难主要在于视频 中存在着各种干扰因素,这些因素包括:运动目标的位移或者自 身的形变、成像传感器本身的固有噪声、照明情况的变化、背景 中的杂波、运动目标的自遮挡或者互遮挡等。这些问题有待我们 进一步研究。
基于光流的运动目标检测跟踪快速算法 关兴来;谢晓竹 【期刊名称】《微计算机信息》 【年(卷),期】2012(000)010 【摘要】Using optical flow algorithm for identification and tracking moving targets, the advantage is the ability to adapt to the com- plex background conditions, and can ensure the integrity of the target partition, but the existing target tracking algorithm based on op- tical flow vector has obvious limitations: excessive operation, and does not apply and movement characteristics of complex targets. Im- provements to existing algorithms, using the pyramid optical flow-based smoothing algorithm and the absolute value of the region seg- mentation algorithm can effectively solve these two problems.%采用光流算法对运动目标进行识别跟踪,其优点是能够适应复杂的背景条件,并且能保证目标分割的完整性,但现有的。按照光流矢量对目标进行跟踪的算法有明显的局限性:运算量过大,并且不适用与运动特征复杂的目标。对现有算法进行改进.采用均值平滑算法和基于光流绝对值的区域分割算法,可以有效解决这两个问题。 【总页数】3页(421-423) 【关键词】光流;运动目标;图像分割 【作者】关兴来;谢晓竹 【作者单位】装甲兵工程学院;装甲兵工程学院