第31卷第18期农业工程学报V ol.31 No.18
2015年9月Transactions of the Chinese Society of Agricultural Engineering Sep. 2015 175 机器人采摘苹果果实的K-means和GA-RBF-LMS神经网络识别贾伟宽1,2,赵德安※
1,2,刘晓洋1,唐书萍1,阮承治1,3,姬伟1,2(1. 江苏大学电气信息工程学院,镇江 212013;2. 机械工业设施农业测控技术与装备重点实验室,镇江 212013;
3. 武夷学院机电工程学院,武夷山 354300)
摘要:为进一步提升苹果果实的识别精度和速度,从而提高苹果采摘机器人的采摘效率。提出一种基于K-means聚类分割和基于遗传算法(genetic algorithm, GA)、最小均方差算法(least mean square, LMS)优化的径向基(radial basis function, RBF)神经网络相结合的苹果识别方法。首先将采集到的苹果图像在Lab颜色空间下利用K-means聚类算法对其进行分割,分别提取分割图像的RGB、HSI颜色特征分量和圆方差、致密度、周长平方面积比、Hu不变矩形状特征分量。将提取的16个特征作为神经网络的输入,对RBF神经网络进行训练,以得到苹果果实的识别模型。针对RBF神经网络学习率低、过拟合等不足,引入遗传算法对RBF隐层神经元个数和连接权值进行优化,采取二者混合编码同时进化的优化方式,最后再利用LMS对连接权值进一步学习,建立新的神经网络优化模型(GA-RBF-LMS),以提高神经网络的运行效率和识别精度。为了获得更精确的网络模型,在训练过程中,苹果果实连同树枝、树叶一块训练;得到的模型在识别过程中,可一定程度上避免枝叶遮挡对果实识别的影响。为了更好地验证新方法,分别与传统的BP(back propagation)和RBF神经网络、GA-RBF优化模型比较,结果表明,该文算法对于遮挡、重叠果实的识别率达95.38%、96.17%,总体识别率达96.95%;从训练时间看,该文算法虽耗时较长,用150个样本进行训练平均耗时4.412 s,但训练成功率可达100%,且节省了人工尝试构造网络结构造成的时间浪费;从识别时间看,该文算法识别179个苹果的时间为 1.75 s。可见GA-RBF-LMS网络模型在运行效率和识别精度较优。研究结果为苹果采摘机器人快速、精准识别果实提供参考。
关键词:图像处理;算法;识别;苹果采摘机器人;K-means分割;特征提取;GA-RBF神经网络
doi:10.11975/j.issn.1002-6819.2015.18.025
中图分类号:TP24, TP391 文献标志码:A 文章编号:1002-6819(2015)-18-0175-09
贾伟宽,赵德安,刘晓洋,唐书萍,阮承治,姬伟.机器人采摘苹果果实的K-means和GA-RBF-LMS神经网络识别[J]. 农业工程学报,2015,31(18):175-183. doi:10.11975/j.issn.1002-6819.2015.18.025 https://www.doczj.com/doc/229768939.html,
Jia Weikuan, Zhao Dean, Liu Xiaoyang, Tang Shuping, Ruan Chengzhi, Ji Wei.Apple recognition based on K-means and GA-RBF-LMS neural network applicated in harvesting robot[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(18): 175-183. (in Chinese with English abstract)
doi:10.11975/j.issn.1002-6819.2015.18.025 https://www.doczj.com/doc/229768939.html,
0 引 言
伴随着科技的进步,以及工业技术的发展,农业机器人技术的发展在科技的驱动下也日趋成熟,使得采摘机器人的发展也达到一个前所未有的高度[1-2]。视觉系统作为采摘机器人的“眼睛”,用来进行环境感知以及实现果实目标物的识别和定位,能否准确、快速地识别出采摘目标物,直接影响着采摘机器人的可靠性和实时性,即影响着采摘机器人的采摘效率。因此,目标物的识别是采摘机器人的关键环节之一,也吸引着众多的学者关
收稿日期:2015-07-12 修订日期:2015-08-14
基金项目:国家自然科学基金资助项目(61379101,31571571);江苏省高校优势学科建设项目(PAPD);高等学校博士学科点专项科研基金(20133227110024);江苏省普通高校研究生科研创新计划项目(KYLX14-1062)。
作者简介:贾伟宽,男,山东菏泽人,博士生,主要从事人工智能、智能信息处理、智能机器人研究。镇江江苏大学电气信息工程学院,212013。Email:jwk_1982@https://www.doczj.com/doc/229768939.html,
※通信作者:赵德安,男,江苏常州人,博士,教授,博士生导师,主要从事智能控制、智能机器人研究。镇江江苏大学电气信息工程学院,212013。Email:dazhao@https://www.doczj.com/doc/229768939.html, 注,并取得了可喜的研究成果[3-4]。
苹果采摘机器人[5]的作业环境相对复杂,苹果果实的快速高效识别,无论是借助单目视觉系统[6-7],还是双目视觉系统[8-9];无论是识别静态果实[10-11],还是动态果实[12];无论单个果实[13],还是重叠遮挡果实[14];以及在近景色苹果[15]、夜间苹果识别[16]等,这些研究虽然都取得很大进展,但目前来看,尚不能满足快速视觉伺服控制的要求。苹果采摘机器人视觉系统的精准、快速识别目标果实,仍是研究的难点和重点。为进一步提高苹果采摘机器人苹果果实的识别精度与速度,满足苹果采摘作业的实时性需求,需进一步优化识别算法。
本研究将径向基(radial basis function, RBF)神经网络[17]引入苹果识别中,它面对复杂问题时具有自适应和自学习的能力,尝试建立一种快速高效的识别算法。首先将采集到的苹果图像在Lab颜色空间下利用K-means 方法[18]进行分割,分别得到苹果目标物和背景的分割图像。然后分别对分割图像进行特征提取,得到相应的特征量。最后利用RBF神经网络对目标图像进行训练和识别。为进一步提高RBF神经网络的性能,利用遗传算法对其进行优化[19-20],本研究采用一种新的优化方式,即
农业工程学报(https://www.doczj.com/doc/229768939.html, ) 2015年
176
连接权值和网络结构二者混合编码同时进化,然后再利用最小均方差(least mean square, LMS )算法对连接权值进一步学习,以克服RBF 神经网络的过拟合、中心难确定的不足,最后得到较优的神经网络模型。
1 苹果果实识别方法
1.1 图像获取
苹果图像的采集地点在江苏省丰县大沙河镇苹果示范基地(江苏大学苹果采摘机器人实验基地),所有图像均在自然光下采集。苹果品种为红富士,图像采集镜头为AFT-0814MP (维视电子有限公司),试验共采集150幅苹果图像,共计果实229个。
为更好地获取苹果图像的特征信息,为目标果实的识别提供基础,这里需要对图像做一系列的处理,如图像分割、特征提取等,它们直接关系到目标物的识别精度。 1.2 图像分割
1.2.1 颜色空间选取
颜色空间的选取往往是决定图像分割的好坏,常见的颜色空间有RGB 、XYZ 、Lab 等。其中RGB 颜色空间可表示大部分颜色,但就其各个分量间关联性过强,不宜直接用于图像分割。而XYZ 颜色空间的主要缺点是非均匀性,在不同的色度和亮度区域,人对颜色的分辨力是不一致的,也不宜直接用于图像分割。Lab 颜色空间是基于XYZ 颜色空间转换而来,从RGB 空间到Lab 空间的转换需要XYZ 颜色空间作为桥梁,即必须先将图像由RGB 颜色空间转换到XYZ 颜色空间,才能进一步转到Lab 空间。
3种颜色空间的转换关系如下[21-22],其中由RGB 颜色空间到XYZ 颜色空间的转换关系为:
0.49
0.310.2010.176970.81240.010630.176970.000.010.99X R Y G Z B ????????????
=??????????????????
(1) 由XYZ 颜色空间到Lab 颜色空间的转换关系为:
116()16500[()()]0.982200[()()]
1.192L f Y X a f f Y Z b f Y f =???
?=????=??
(2) 其中
()f t =1/3
0.008856
7.7870.138
0.008856
t t t t ?>?
+?≤ (3)
式中:R 、G 、B 为RGB 颜色空间下红、绿、蓝3个特征
分量;X 、Y 、Z 为3个假想原色;L 、a 、b 为Lab 颜色空间中的亮度、红色至绿色的范围、蓝色至黄色的范围3个特征分量;t 为函数变量。图像转换到Lab 颜色空间后,即可进行苹果图像的目标分割。 1.2.2 K -means 聚类算法分割
K -Means 聚类算法以K 为参数,它是把m 个样本分成K 个不同的类,使类内的样本具有较高的相似度,而不同类间的样本则相似度较低。设聚类的中心为u k ,则
聚类的平均差E k 表示为:
2()m
k ik k i E x u =?∑ (4)
式中:x ik 为第K 个聚类中的第i 个样本。通过迭代,使所聚的K 个类的总误差平方和最小,即每个类内距离尽可能小,而类间距离尽可能大。
图像的K -Means 分割基本步骤如下:
Step 1 将采集到的重叠苹果图像,根据图像的特点,确定K 值,即要聚的类;
Step 2 根据K 值确定K 个初始聚类中心:
u 1,u 2,…,u k ; Step 3 分别计算每个像素点到K 个聚类中心的距离;
Step 4 筛选像素点到类中心的最小距离,并把该像素划归为该聚类中心所属的类别;
Step 5 根据类的像素点,重新计算每个聚类的均值,重新调整K 个聚类中心;
Step 6 判断新的聚类中心是否有所变化,若不再变化,则算法终止,否则返回Step 3。
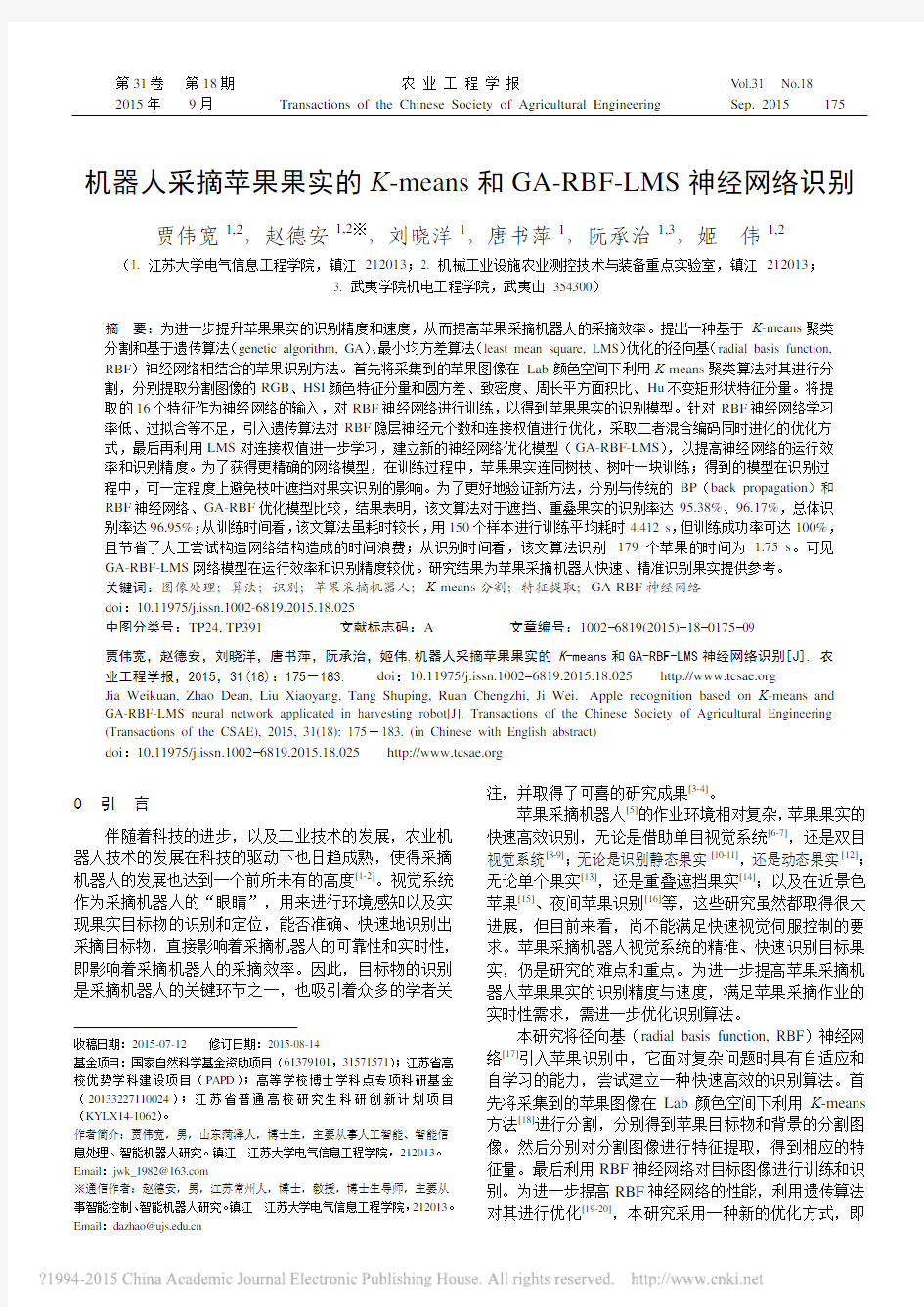
对所采集到的苹果图像,通过计算每个像素点的L 、a 、b 值,进行K -Means 聚类。K -means 分割后的得到的图像根据该类别的色彩平均值范围将其与结果对应。因苹果果实、树叶、树枝的颜色、形状差异均较大,所采集的图像处理时,根据三者的颜色不同,令K 值为3,即分为3个类u 1,u 2,u 3,分别表示果实、树叶、树枝。本研究中,样本距离采用欧氏距离,聚类准则采用最小距离原则。其分割效果如图1所示。
a. 原始图像 a. Original image
b. 分割出的苹果
b. Segmented apples
c. 分割出的树叶 c. Segmented leaves
d. 分割出的树枝 d. Segmented stems
图1 苹果图像的K -means 分割结果
Fig.1 Results of K -means segmentation for apple image
1.3 图像特征提取
在苹果采摘机器人的图像识别系统中,主要关注的是目标果实的精准识别。然而由于苹果自然生长的姿态多变,以及图像采集时拍摄角度不同,易出现枝叶遮挡果实、果实间相互重叠等现象,对目标物的精准识别造成干扰。
枝叶遮挡、相互重叠的果实,得到的图像不尽相同,且变化万千,所提取的特征往往不够完备,不能完整地表征目标物的特性,因此在识别过程中,易出现误识、
第18期贾伟宽等:机器人采摘苹果果实的K-means和GA-RBF-LMS神经网络识别177
漏识现象。为了得到更精确的神经网络识别模型,且便于统计识别结果,在神经网络训练时,将苹果果实、树叶和树枝同时训练。
在训练样本的特征提取时,既要考虑到苹果,还要考虑到树叶和树枝,即在分割图中截取相对完整的一片树叶、一段树枝,用于提取特征。而在识别样本的图像中,只提取苹果果实目标物的特征即可。
1.3.1 颜色特征提取
苹果果实、树叶、树枝颜色差异相对明显,因此提取目标物的颜色特征切实可行。在RGB(red, green, blue)颜色空间中,可直接进行颜色比较,且能很好地控制颜色的特征信息,目标物的R、G、B3个分量特征在颜色特征提取中非常有效。因苹果采摘机器人户外作业,考虑到光照对图像的影响,进一步在HSI(hue, saturation, intensity)颜色空间中提取颜色特征。HSI颜色空间与人眼感知颜色的有些相似,且能适应所有光照条件,提取目标物的H、S、I 3个分量特征在颜色特征提取中是非常必要的。
本研究共提取RGB、HSI颜色空间下的6个颜色分量特征[23],用以描述目标物的全局特征。
1.3.2 形状特征提取
苹果果实、树叶、树枝都有其各自特定的形状,且差异较为明显,因此提取目标物的形状特征亦切实可行。依据苹果果实图像的特点,本研究选取几何形状特征和Hu不变矩[24-25],其中几何特征主要选取圆方差、致密度、周长平方面积比3个特征向量,Hu不变矩包含7个特征向量。
本研究共提取10个形状特征,他们最大的特点是,不因目标物在图像中的位置、大小、角度而有所改变,它们满足RST(rotate, scale, translation,即旋转、缩放、平移)不变性。
1.4 GA-RBF苹果识别算法
苹果果实的识别,本质上可以看作是一个输入/输出的分类问题。而分类问题的转换关系包括数值拟合、模糊转换和逻辑推理3个方面,而神经网络又可以逼近任意非线性系统,显示了处理这类问题的优越性。将1.3节所提取的苹果果实、树叶和树枝颜色和形状的16个特征作为神经网络的输入进行建模。
本研究选用RBF神经网络设计分类器,它的最大优势在于用线性学习算法来完成以往非线性学习算法所做的工作,同时又保持非线性算法的高精度;具有最佳逼近、全局最优、收敛速度快等特性。RBF神经网络在解决分类问题中获得了广泛的应用[26-27]。然而RBF神经网络也存在自身不足,如易出现过拟合,中心难以确定,学习率偏低等,这些都影响网络的运行效率和识别精度。
遗传算法(genetic algorithm,GA)是从代表问题可能潜在解集的一个种群开始,而种群则由经过基因编码的一定数目的个体组成,个体是染色体带有特征的实体。GA在每次迭代中都保留一组候选解,按其解的优劣进行排序,并按某种指标从中选出一些解,利用遗传算子对其进行运算,产生新一代的一组候选解,重复此过程,直到满足某种收敛指标为止。
将遗传算法引入RBF神经网络算法,以往的优化方式大都采取单独优化连接权值或隐层神经元个数,虽取得不错的效果,但仍有改进的空间。为了得到更优的RBF 神经网络模型,本研究提出一种新的优化方式,即连接权值和隐层神经元个数混合编码同时进化。新方法对隐层神经元采用二进制编码,连接权值采用实数编码,在自适应调整网络结构的同时完成连接权值的学习。RBF 的激活函数一般采用局部的高斯函数,虽解决了局部最小问题,但全局搜索能力稍差。经遗传算法优化后,可以得到最优的网络结构,但隐层神经元到输出神经元间的权值进化一般不够充分,需要进一步优化,然后再利用LMS算法对连接权值进一步学习。最后建立一种新的基于遗传算法和最小均方差算法优化的RBF神经网络分类算法(GA-RBF-LMS),用以苹果果实的识别。
1.4.1 GA-RBF优化算法构造
采用GA优化RBF网络的主要内容有染色体编码、适应度函数定义和遗传算子构造。用遗传算法优化神经网络可被看成是一种能在没有人力干预条件下,自动调整其网络结构与连接权值的自适应系统,实现遗传算法与神经网络的有机融合,可用图2表示。
图2 遗传算法与神经网络结合图
Fig.2 Flow chart of genetic algorithm combined with neural
network
1)染色体编码
设RBF神经网络的最大隐层神经元数目为s,输出层神经元数目为l,则GA算法构造一条染色体编码为:
1211211122221212
... ...............
s s s l l sl l
c c c w w w w w w w w wθθθ(5)式中:隐层神经元个数采用二进制进行编码,用c i表示,其值为0或1,其为1表示该神经元存在,反之则为0,s表示其上限;隐层神经元到输出层神经元的连接权值采用实数编码,用w pj表示输出层第p个神经元到隐层第j 个神经元的连接权值;输出神经元的阈值同样采用实数编码的方式,用θj表示第j个输出层神经元的阈值。
2)遗传算子构造
选择算子使用轮盘赌选择法,即适应度越高的个体越容易被选中,适应度低的个体也可能被选中,这样就在“适者生存”的同时,保持了种群的多样性。
农业工程学报(https://www.doczj.com/doc/229768939.html, ) 2015年
178
交叉算子使用单点交叉算子,每次选择2个父代个体进行交叉操作以产生2个新个体,放到新一代的种群中,重复这一过程,直到达到种群的最大规模。采用精英保留策略,防止了进化过程中最优个体的丢失。
变异算子使用逆转算子,二进制编码采用位翻转变异,即染色体中的某一位由1变为0,或由0变为1,对与实数编码,则采用高斯变异,即染色体的某个基因位加上一个高斯随机数。
3)适应度计算
在这里采用网络的训练误差和网络的规模来确定该网络对应的染色体的适应度,以e 为训练误差,n 为网络隐层的节点数,s max 为网络隐层的最大节点数,则适应度:
max /s en C F ?= (6) 式中:C 为一常数,该式保证了网络的规模越小,并且训练误差越小,其对应染色体的适应度越高。
4)RBF 神经网络构造
经典的RBF 构造一般采用如下规则,根据经验选择基函数的中心,只要训练样本的分布能代表所给问题,即可根据经验选定均匀分布的q 个中心,其间距为d ,选取高斯基函数的宽度σ为:
q d 2/=σ (7)
用K -means 聚类方法选择基函数,以各聚类的中心作为基函数中心。因输出层是线性单元,它的权值可以简单地用最小二乘法直接计算出来。 1.4.2 GA-RBF 优化分类算法
依据上述构造思想,设计神经网络结构,训练过程采用隐层神经元和连接权值同时进化学习的方式。本研究所提出的GA-RBF-LMS 神经网络算法的基本步骤如下:
Step 1 设置RBF 神经网络,根据隐层最大神经元个数s ,采用K -means 聚类算法获得基函数中心,用公式(7)计算中心的宽度;
Step 2 设定GA 算法的参数,种群大小为Ps ,交叉率Pc ,变异率Pm ,选择、交叉、变异算子,令迭代次数G =0,目标函数误差为Emin ,最大迭代次数为Gmax ;
Step 3 随机初始化种群P ,大小为N ,对每个个体对应的网络按公式(5)的方式进行编码;
Step 4 对初始构造的N 个RBF 神经网络进行样本训练,计算网络的输出误差e ;
Step 5 根据训练误差e 和隐层神经元数目s ,计算网络所对应的染色体适应度F ;
Step 6 将染色体适应度依据大小进行排序,选择种
群最佳适应度F b ,判断
max
min ()b C F s E n
?<或max G G ≥,转向step10,否则转向step7;
Step 7 选择若干个最优个体直接保留给下一代NewP ;
Step 8 选择一对染色体进行单点交叉,产生2个新个体,将其作为新一代群体成员,重复此过程,直到新种群达到种群上限Ps ,此时编码要分开进行;
Step 9 对新一代种群进行变异操作,二进制编码部
分和实数编码部分需采取不同的变异策略。至此,新一代种群产生,令P =NewP ,G =G +1,转向Step4;
Step 10 得到最优网络结构,终止遗传优化;
Step 11 得到的网络权值学习不够充分,再用LMS 方法对权值进一步学习,算法终止。
建立新模型的意义在优化网络的结构,以确定隐层神经元个数,以及基函数的中心,优化权值和阈值,以提高网络的训练速度和收敛性,节省网络的运行时间,进而提高网络的运行效率和识别精度。利用新建立的模型进行苹果果实的识别,可提高其识别效率和精度,进一步提高苹果采摘机器人的采摘效率。 1.5 K -means 和GA-RBF-LMS 识别方法
本文中所提出的苹果果实识别方法由三部分组成,包括苹果图像的预处理、模型的训练与识别、识别目标的拟合。综合前面所述,本文苹果识别方法的流程图如图3所示。
图3 K -means 和GA-RBF-LMS 苹果识别算法流程图 Fig.3 Flow chart of apple recognition algorithm based on
K -means and GA-RBF-LMS neural network
如图3所示,苹果识别算法流程包含3个部分,其中图像预处理模块主要包括图像的分割和特征提取;图像的识别模块主要包括识别模型的训练和待测样本的识别;果实拟合模块主要包括小区域去噪、轮廓提取、目标果实拟合。
本文所提出的苹果果实识别方法可概述为:采集的苹果图像,首先在Lab 颜色空间下利用K -means 进行图像分割,对分割图像进行颜色和形状特征提取。然后利用训练样本对GA 和LMS 优化的RBF 神经网络进行训练,得到GA-RBF-LMS 识别模型,将待测样本进行识别得到识别目标物。最后对目标物通过二值化、小区域去噪、轮廓提取等处理,完成目标果实的拟合。
2 试验设计与结果分析
2.1 试验设计
将所采集到的图像划分为训练样本和测试样本,为
第18期贾伟宽等:机器人采摘苹果果实的K-means和GA-RBF-LMS神经网络识别179
了训练得到更精确的神经网络模型,训练样本在图像预处理时,需要分别提取出苹果果实、树叶、树枝三者的特征。因此在所采集到的150幅图像中,筛选出50幅图像作为训练样本,训练样本的每幅图像中仅含有1个苹果果实。剩余的100幅图像作为测试样本,只需提取苹果果实特征即可进行识别。
为了更好地验证本文提出的识别算法,试验分别采用传统的误差反向传播(back propagation,BP)神经网络、RBF神经网络进行对比。GA同时优化网络结构与权值的RBF算法,记为GA-RBF;进一步用LMS对权值进行学习的算法,记为GA-RBF-LMS。本次试验采用这4种模型进行比较。
用训练样本对各种算法模型进行训练,然后用测试样本对得到的网络模型进行验证。分别从训练成功率、训练误差、训练时间、测试误差、识别率、识别时间6个指标衡量模型的优劣。其中训练成功率指神经网络模型训练成功次数与训练总次数的比率;训练误差为模型训练时,通过K折交叉验证,统计成功训练时的误差总和;训练时间是指完成一次训练的耗时;测试误差则是用已训练好的模型对测试样本进行识别时的计算误差;识别率是指正确识别果实的个数与待识别总个数的比率;识别时间是指用训练好的模型对所用待测样本进行识别的耗时。其中识别率,根据果实的生长姿态和图像采集角度,将其分为无遮挡果实、枝叶遮挡果实、重叠果实三类,分别进行计算。试验重复50次,最后计算各指标的值。
2.2 试验设置
本研究的试验运行平台如下,主机配置:CPU Intel Core2 Duo E7300 2.66 GHz,RAM 1.99GB,显卡Intel? G33/G31 ECF;运行环境:32bit Windows XP,Matlab R2012b。
本研究试验参数设置:LMS算法的最大迭代次数为1 000次,LMS的学习率为0.1,RBF神经网络的最大规模数为100,遗传算法的最大迭代次数为300次,其种群大小设为50,交叉率为0.9,变异率为0.01。BP神经网络的隐层神经元个数采用高大启经验公式设定[28],最大迭代次数为2 000次。
2.3 神经网络训练
训练样本选取出50幅图像,将图像分割成苹果、树叶、树枝三部分,并在分割出的树叶、树枝图像中分别提取出连通区域的一片树叶、一段树枝。因此共有50个苹果、50片树叶、50段树枝参与神经网络建模训练,因此训练样本集可看作150个样本,神经网络的输出为3类。由1.3节可知,每个样本相应提取16个特征,因此设计神经网络为16个输入,3个输出。利用训练样本分别对4种网络模型进行50次10折交叉验证,训练结果列于表1。
由表1可知,训练成功率经50次重复训练,传统的BP与RBF神经网络相当,BP略高于RBF网络。但经遗传算法优化后,训练成功率大幅提高,且可以达到100%,即每次都可以训练成功。
表1 不同算法训练性能比较
Table 1 Comparison of training performance of each algorithm 网络模型
Neural network
训练成功率
Training success
rate/%
训练误差
Training error
训练时间
Training time/s
BP 90
0.1406
2.362
RBF 86
0.2217
1.513
GA-RBF 100 0.1069
4.017
GA-RBF-LMS 100 0.0837 4.412
注:训练误差和训练时间为平均值;误差是指误差平方和,无量纲。
Note: the result of training error and training time is average value; the error
refers to the sum of squares error, and it is non-dimensional.
从训练时间看,GA-RBF-LMS网络耗时最长,RBF
最短;RBF神经网络经遗传算法优化,虽使得训练时间
增加,但训练成功率大增;GA-RBF-LMS训练时间最长,
因为经历了遗传算法和最小均方差算法2次优化,每次
优化都要以时间为代价。虽然训练时间稍长,但省去多
次人工尝试构造网络结构造成的时间浪费。
从训练误差看,RBF神经网络误差最大,而经2次
优化的GA-RBF-LMS模型误差最小。可见在训练过程
中,GA-RBF-LMS算法虽耗时最长,但训练成功率最高,
误差最小。
2.4 识别模型验证
由于苹果果实自然生长姿态多变,以及由于采摘机
器人的机位造成的拍摄角度等因素,使得采摘机器人视
觉系统所采集到的苹果图像多种多样,如单个无遮挡果
实、枝叶遮挡果实、重叠果实等。用本文提出的
GA-RBF-LMS神经网络作为苹果果实的分类器,分别对
无遮挡、枝叶遮挡、重叠果实三类样本进行试验。试验
效果如图4所示。
从识别效果看,三类苹果果实图像已从背景中分离
出来。对识别出的苹果图像进行二值化、小区域去噪,
并采用轮廓提取技术提取苹果果实图像轮廓。还需要进
一步采用文献[10]提出的极值法对各图像的轮廓进行边
界拟合,得到最终的识别效果。
苹果果实在枝叶遮挡的情况下,所提取的特征不够
完整,容易造成信息损失,影响分类模型的识别效果,
容易出现误识的情况;如果遮挡区域面积比较大,甚至
会出现漏识的现象。在果实重叠的情况下,同样会导致
所提取的特征不够完整。重叠果实的识别更为复杂,还
要涉及到分割和拟合。与遮挡果实的区别在于,如果重
叠面积过大,则可能会将2个重叠果实识别为1个,进
而导致被重叠遮挡的果实的漏识。如图5所示,由于重
叠面积过大,将2个重叠果实拟合成1个果实,造成被
遮挡果实的漏识。
2.5 苹果果实识别
为了更清晰地描述本文所建立模型的识别效果,这
里将三类不同的生长姿态的苹果果实进行分别统计。剩
余的100幅待测试样本图像中,共含有179个苹果果实,
其中单个无遮挡果实61个,重叠果实48个,枝叶遮挡
果实70个。50次重复试验后(此处统计为每次试验均训
练成功),计算平均识别率,结果列于表2。
农业工程学报(https://www.doczj.com/doc/229768939.html, ) 2015年
180
原图
Original image
去背景
Background elimination
二值化 Binaryzation
小区域去噪 Small area denoising
轮廓提取 Contour extraction
拟合 Fitting
a. 无遮挡果实
a. Apple fruit without any obscured
原图
Original image
去背景
Background elimination
二值化 Binaryzation
小区域去噪 Small area denoising
轮廓提取 Contour extraction
拟合 Fitting
b. 枝叶遮挡果实
b. Apple fruit obscured by leaves and stems
原图
Original image
去背景
Background elimination
二值化 Binaryzation
小区域去噪 Small area denoising
轮廓提取 Contour extraction
拟合 Fitting
c. 重叠果实
c. Overlapping apple fruit
图4 三类果实的识别效果图
Fig.4 Recognition effect of three classes fruit
原图
Original image
去背景
Background elimination
二值化 Binaryzation
小区域去噪 Small area denoising 轮廓提取 Contour extraction
拟合 Fitting
图5 重叠果实图像漏识示例图
Fig.5 Missing recognition of overlapping fruit image
表2 三类果实的正确识别率
Table 2 Correct recognition rate of three classes fruits %
网络模型 Neural network 无遮挡果实 Fruit without obscured 重叠果实 Overlapping fruit 遮挡果实
Obscured fruit
BP 99.51 87.88 88.83 RBF 99.34 86.21 87.63 GA-RBF 99.67 91.29 93.34 GA- RBF-LMS 99.84 95.38 96.17
由表2可知,几种算法模型对无遮挡的果实的识别
均能达到很好的效果,表明神经网络模型应用于苹果果
实识别切实可行。然而对于重叠果实和遮挡果实几种算
法模型的表现有所不同,表现最差的是传统的RBF 网络
模型,传统的BP 网络稍好,GA-RBF-LMS 模型表现最好,对2种果实的平均识别率达到95.38%、96.17%。 值得注意的是枝叶的遮挡程度、果实的重叠程度均在很大程度上影响着苹果果实的识别。对118个重叠、遮挡果实进行统计,其中枝叶遮挡果实的情况,当遮挡
面积小于30%时,对识别率没有影响;而当遮挡面积在30%~60%时,对识别结果有影响,易造成误识;而遮挡
第18期 贾伟宽等:机器人采摘苹果果实的K -means 和GA-RBF-LMS 神经网络识别
181
面积大于60%甚至更大时,对识别造成困难,出现误识的机率更大,甚至无法识别。而重叠果实的情况,重叠面积小于30%时,对识别没有影响,可以识别出2个苹果;而重叠面积大于30%时,则容易将2个重叠果实识别为1个,被重叠遮挡的果实造成漏识。
进一步评价不同算法的运行效率和识别精度,统计识别时间和识别精度,经50次重复试验,将平均结果列于表3。
表3 不同算法的识别性能比较
Table 3 Comparison of recognition performance of each
algorithm 网络模型 Neural network 识别时间
Recognition time/s
总识别率 Total recognition rate/% 误差平方和 Sum of squared
errors
BP 2.21 92.58 15.3247 RBF 1.87 91.47 18.5096
GA-RBF 1.79 95.33 11.8423
GA-RBF-LMS 1.75
96.95
10.0537
由表3可知,从识别时间看,几种算法相差不大。然而从总识别率看,GA-RBF-LMS 表现较优。识别179个苹果的时间为1.75 s ,识别率达96.95%。从识别误差平方和看,RBF 最大,经过优化的GA-RBF-LMS 网络模型最小,且该模型的识别率较高,表明识别精度较优。 2.6 试验结果分析
由表1~3的数据结果可知,在训练过程中,RBF 收敛最快,然而其成功率和训练精度较差。经GA 优化后的GA-RBF ,训练成功率虽有所提高,然而其训练精度依然不理想。经GA 和LMS 2次优化的GA-RBF-LMS 虽训练时间稍长,但训练成功率和训练精度均较高,以时间代价换取精度提高。
在识别过程中,无论从运行效率还是从识别精度看,GA-RBF-LMS 相对于其他几种模型而言,效果均达到最优。GA-RBF-LMS 算法虽在训练过程稍微繁琐,但可以训练得到最为精准的模型,在对于受枝叶遮挡和重叠的苹果果实的识别精度要明显高于其他几种算法模型。
从整体运行结果看,新模型的运行效率和识别精度均有大幅度的提高。试验结果表明,GA-RBF-LMS 苹果果实识别模型达到预期。
3 结 论
1)为提高苹果采摘机器人的采摘效率,本文对采集到的苹果图像进行了相关研究。首先将苹果图像转换到Lab 颜色空间下,利用K -Means 聚类的方法对图像进行分割,对分割的图像进行相关形态学运算后,进行特征提取。然后提出一种新的遗传算法(genetic algorithm ,GA )优化的径向基(radial basis function ,RBF )神经网络算法进行训练和识别,即采用连接权值与网络结构二者混合编码同时进化的优化方式,并对连接权值利用最小均方差(least mean square ,LMS )算法进一步优化,最后得到更为精准的GA-RBF-LMS 优化模型。
2)苹果图像在Lab 颜色空间下,K -means 聚类分割
可以有效分割出苹果果实、树叶、树枝图像,分割效果良好。并进一步对分割的图像进行特征提取,共提取RGB 、HIS 6个颜色特征分量和圆方差、致密度、周长平方面积比、Hu 不变矩10个形状特征向量。
3)利用所提取的16个特征构造神经网络模型,用训练样本对其进行训练。从训练得到的几种模型对比看,GA-RBF-LMS 模型训练时间最长,达4.412 s ,该模型精度较高,训练成功率达100%,训练误差为0.0837。
4)对训练得到的模型进行识别测试,从对比试验结果看,几种模型对无遮挡的果实识别效率都比较高,然而对于枝叶遮挡和重叠果实,GA-RBF-LMS 模型的识别
率要高于其他模型,分别达到率达到95.38%、96.17%。从整体对比结果看,GA-RBF-LMS 模型识别所有苹果的运行时间为1.75s ,识别率达96.95%,高于其他模型,且误差最小。表明新建立的GA-RBF-LMS 的运行效率和识
别精度最高,适用于采摘机器人的苹果目标物识别。
[参 考 文 献]
[1] Bac CW, van Henten EJ, Hemming J, et al. Harvesting robots
for high-value crops: state-of-the-art review and challenges ahead[J]. Journal of Field Robotics, 2014, 31(6): 888-911. [2] 方建军. 移动式采摘机器人研究现状与进展[J]. 农业工程
学报,2004,20(2):273-278.
Fang Jianjun. Present situation and development of mobile harvesting robot[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2004, 20(2): 273-278. (in Chinese with English abstract) [3] 项荣,应义斌,蒋焕煜. 田间环境下果蔬采摘快速识别与
定位方法研究进展[J]. 农业机械学报,2013,44(11):208-233.
Xiang Rong, Ying Yibin, Jiang Huanyu. Development of real-time recognition and localization methods for fruits and vegetables in field[J]. Transactions of the Chinese Society for Agricultural Machinery, 2013, 44(11): 208-223. (in Chinese with English abstract)
[4] 谢忠红,姬长英,郭小清,等. 基于改进Hough 变换的类圆果实目标检测[J]. 农业工程学报,2010,26(7):157-162. Xie Zhonghong, Ji Changying, Guo Xiaoqing, et al. An object detection method for quasi-circular fruits based on improved Hough transform[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2010, 26(7): 157-162. (in Chinese with English abstract)
[5] Zhao D A, Lü J D, Ji W, et al. Design and control of an apple
harvesting robot[J]. Biosystems Engineering, 2011, 110(2): 112-122.
[6] Kelman E E, Linker R. Vision-based localisation of mature
apples in tree images using convexity[J]. Biosystems Engineering, 2014, 118: 174-185. [7] 马晓丹,刘刚,周薇,等. 基于量子遗传模糊神经网络的
苹果果实识别[J]. 农业机械学报,2013,44(12):227-233. Ma Xiaodan, Liu Gang, Zhou Wei, et al. Apple recognition based on fuzzy neural network and quantum genetic algorithm[J]. Transactions of the Chinese Society for
农业工程学报(https://www.doczj.com/doc/229768939.html,) 2015年182
Agricultural Machinery, 2013, 44(12): 227-233. (in Chinese
with English abstract)
[8] Rakun J, Stajnko D, Zazula D. Detecting fruits in natural
scenes by using spatial-frequency based texture analysis and
multiview geometry[J]. Computers and Electronics in Agriculture, 2011, 76(1): 80-88.
[9] 蔡健荣,孙海波,李永平,等. 基于双目立体视觉的果树
三维信息获取与重构[J]. 农业机械学报,2012,43(3):
152-156.
Cai Jianrong, Sun Haibo, Li Yongping, et al. Fruit trees 3-D
information perception and reconstruction based on binocular
stereo vision[J]. Transactions of the Chinese Society for Agricultural Machinery, 2012, 43(3): 152-156. (in Chinese
with English abstract)
[10] 赵德安,沈甜,陈玉,等. 苹果采摘机器人快速跟踪识别
重叠果实[J]. 农业工程学报,2015,31(2):22-28.
Zhao Dean, Shen Tian, Chen Yu, et al. Fast tracking and
recognition of overlapping fruit for apple harvesting robot[J].
Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(2): 22-
28. (in Chinese with English abstract)
[11] Ji W, Zhao D A, Cheng F Y, et al. Automatic recognition
vision system guided for apple harvesting robot[J].
Computers & Electrical Engineering, 2012, 38(5): 1186-
1195.
[12] 吕继东,赵德安,姬伟. 采摘机器人振荡果实匹配动态识
别[J]. 农业工程学报,2013,29(20):32-39.
Lü Jidong, Zhao Dean, Ji Wei. Research on matching recognition method of oscillating fruit for harvesting robot[J].
Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2013, 29(20): 32-
39. (in Chinese with English abstract)
[13] 王丹丹,徐越,宋怀波,等. 基于平滑轮廓对称轴法的苹
果目标采摘点定位方法[J]. 农业工程学报,2015,31(5):
167-174.
Wang Dandan, Xu Yue, Song Huaibo, et al. Localization
method of picking point of apple target based on smoothing
contour symmetry axis algorithm[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of
the CSAE), 2015, 31(5): 167-174. (in Chinese with English
abstract)
[14] 王丹丹,徐越,宋怀波,等. 融合K-means与Ncut算法的
无遮挡双重叠苹果目标分割与重建[J]. 农业工程学报,
2015,31(10):227-234.
Wang Dandan, Xu Yue, Song Huaibo, et al. Fusion of K-means and Ncut algorithm to realize segmentation and
reconstruction of two overlapped apples without blocking by
branches and leaves[J]. Transactions of the Chinese Society
of Agricultural Engineering (Transactions of the CSAE), 2015, 31(10): 227-234. (in Chinese with English abstract) [15] 张春龙,张楫,张俊雄,等. 近色背景中树上绿色苹果识
别方法[J]. 农业机械学报,2014,45(10):277-281.
Zhang Chunlong, Zhang Ji, Zhang Junxiong, et al.
Recognition of green apple in similar bcakground[J].
Transactions of the Chinese Society for Agricultural
Machinery, 2014, 45(10): 277-281. (in Chinese with English abstract)
[16] 贾伟宽,赵德安,阮承治,等. 苹果采摘机器人夜间图像
降噪算法[J]. 农业工程学报,2015,31(10):219-226.
Jia Weikuan, Zhao Dean, Ruan Chengzhi, et al. De-noising
algorithm of night vision image for apple harvesting robot[J].
Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(10):
219-226. (in Chinese with English abstract).
[17] Moody J, Dkaren C J. Fast learning in networks locally-tuned
processing units[J]. Neural Computation, 1989, 1(2): 281-
294.
[18] Malinen M I, Mariescu-Istodor R, Franti P. K-means*:
clustering by gradual data transformation[J]. Pattern Recognition, 2014, 47(10): 3376-3386.
[19] Manrique D, Ríos J, Rodríguez A. Evolutionary system for
automatically constructing and adapting radial basis function
networks[J]. Neurocomputing, 2006, 69(16-18): 2268-2283. [20] Ding S F, Xu L, Su C Y. An optimizing method of RBF
neural network based on genetic algorithm[J]. Neural Computing and Applications, 2012, 21(2): 333-336.
[21] 宋怀波,何东健,潘景朋. 基于凸壳理论的遮挡苹果目标
识别与定位方法[J]. 农业工程学报,2012,28(22):174-
180.
Song Huaibo, He Dongjian, Pan Jingpeng. Recognition and
localization methods of occluded apples based on convex hull
theory[J]. Transactions of the Chinese Society of Agricultural
Engineering (Transactions of the CSAE), 2012, 28(22): 174-
180. (in Chinese with English abstract)
[22] CIE 1931 color space[OL]. https://https://www.doczj.com/doc/229768939.html,/wiki/
[23] 朱虹,郑丽敏,尹健玲,等. 基于冠层图像颜色特征提取
的小麦氮营养水平评价[J]. 农业工程学报,2010,26(14):
16-20.
Zhu Hong, Zheng Limin, Yin Jianling, et al. Nitrogen evaluation of winter wheat based on color features of canopy
images[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2010,
26(14): 16-20. (in Chinese with English abstract)
[24] 王津京,赵德安,姬伟,等. 采摘机器人基于支持向量机
苹果识别方法[J]. 农业机械学报,2009,40(1):148-151.
Wang Jinjing, Zhao Dean, Ji Wei, et al. Apple fruit recognition based on support vector machine using in harvesting robot[J]. Transactions of the Chinese Society for
Agricultural Machinery, 2009, 40(1): 148-151. (in Chinese
with English abstract)
[25] 王吉林,赵力. 数字图像形状特征提取的研究[J]. 微电子
学与计算机,2010,27(5):118-120.
Wang Jilin, Zhao Li. Research on extracting shape feature of
digital image[J]. Microelectronics & Computer, 2010, 27(5):
118-120. (in Chinese with English abstract).
[26] 关海鸥,杜松怀,李春兰,等. 基于有限脉冲反应和径向
基神经网络的触电信号识别[J]. 农业工程学报,2013,
29(8):187-194.
Guan Haiou, Du Songhuai, Li Chunlan, et al. Recognition of
electric shock signal based on FIR filtering and RBF neural
第18期贾伟宽等:机器人采摘苹果果实的K-means和GA-RBF-LMS神经网络识别183
network[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2013, 29(8): 187-
194. (in Chinese with English abstract)
[27] Babu G S, Suresh S. Meta-cognitive RBF network and its
projection based learning algorithm for classification problems[J].
Applied Soft Computing, 2013, 13(1): 654-666. [28] 高大启. 有教师的线性基本函数前向三层神经网络结构研
究[J]. 计算机学报,1998,21(1):80-86.
Gao Daqi. On structures of supervised linear basis function feed forward three-layered neural networks[J]. Chinese Journal of Computers, 1998, 21(1): 80-86. (in Chinese with
English abstract)
Apple recognition based on K-means and GA-RBF-LMS neural network
applicated in harvesting robot
Jia Weikuan1,2, Zhao Dean1,2※, Liu Xiaoyang1, Tang Shuping1, Ruan Chengzhi1,3, Ji Wei1,2
(1. School of Electrical and Information Engineering, Jiangsu University, Zhenjiang 212013, China; 2. Key Laboratory of Facility
Agriculture Measurement and Control Technology and Equipment of Machinery Industry, Zhenjiang 212013, China;
3. School of Mechanical and Electrical Engineering, Wuyi University, Wuyishan 354300, China)
Abstract: In order to improve the recognition precision and speed for apple, and further improve the harvesting efficiency of apple harvesting robot, an apple recognition method based on combining K-means clustering segmentation with genetic radial basis function (RBF) neural network is proposed. Firstly, the captured apple image is transformed into L*a*b* color space, and then under this color space, the K-means clustering algorithm is used to segment the apple image. The color feature components and shape components of segmented image are extracted respectively. The color features include R, G, B, H, S and I, a total of 6 feature components; and the shape features include circular variance, density, ratio of perimeter square to area, and 7 Hu invariant moments, a total of 10 shape components. These extracted 16 features are used as the inputs of neural network to train RBF neural network, and get the apple recognition model. Due to some inherent defects the RBF neural network has, such as low learning rate, easily causing over fitting phenomenon, genetic algorithm (GA) is introduced to optimize the connection weights and the number of hidden layer neurons. In this study, a new optimization way is adopted, that is, the hybrid encoding of the number of hidden layer neurons and connection weights is carried out simultaneously. This moment, the learning of weights is not completed, and the least mean square (LMS) is used to further learn the connection weights. Finally, an optimized neural network model (GA-RBF-LMS) is established, which is to improve the operating efficiency and recognition precision. In the experiments, there are 150 images captured, and they have 229 apples; among them 50 images are selected as training samples, and the rest as testing samples. Every image for training sample has only one apple, so the testing samples have 179 apples. In order to get the precise model, fruits of apple are together with branches and leaves for training during the training process, which avoids the influence of branches or leaves shade on the recognition to some extent. So the training samples have 50 apples, 50 branches and 50 leaves, which are a total of 150 training samples, and the outputs of neural network include 3 classes. In order to compare with the traditional back propagation (BP) and RBF neural network, and GA-RBF algorithm, a series of experiments are carried out. After repeated trainings of 50 times, the results show that the successful training rate of the GA-RBF-LMS is the highest, which can reach 100% and get the minimum training error; but its running time is the longest, because the 2 optimizations of genetic algorithm and LMS are at the expense of the time. The recognition rates of the fruits with different growth postures, such as fruit without obscuration, overlapping fruit and covered fruit, are calculated respectively. After repeated experiments of 50 times, the results show that these 4 recognition models can achieve very good effect for recognizing the fruit without obscuration. For covered fruit and overlapping fruit, the recognition rate of GA-RBF-LMS is the highest, which can reach 95.38% and 96.17%, respectively. Looking from the overall, the recognition rate reaches 96.95%, recognizing 179 apples consumes 1.75 s, and the sum of square of error is the smallest. From the training time, the GA-RBF-LMS algorithm is the longest, whose average training time is 4.412 s for 150 training samples, but the training success rate can reach 100%, which saves the time wasted in human trying to construct the network structure. All of these illustrate that the GA-RBF-LMS neural network model has the higher operating efficiency and recognition precision, and it can be applied in target recognition for apple harvesting robot.
Key words: image processing; algorithms; identification; apple harvesting robot; K-means segmentation; feature extraction; GA-RBF neural network
苹果采摘装置的研究与探讨 【摘要】苹果采摘装置适用于苹果成熟后的苹果采摘,智能化机械化的采摘模式解放了劳动力,提高了采摘效率,本装置利用无线遥控技术,搭载移动平台,安装末端执行装置即机械手,实现了苹果采摘过程中的机械化,利于农业机器人的研发应用。 【关键词】苹果采摘;机械手;传感器 Abstract:Apple picking device is suitable for mature apple picking,intelligent mechanization picking mode liberated the labor force,improve the picking efficiency,this device using the wireless remote control technology,with a mobile platform,installation of the manipulator end point device,realized in the process of apple picking mechanization,agricultural research and application of the robot. Key words:Apple picking;Manipulator;The sensor 引言 21世纪以来,随着我国城镇化的社会进程,原始的农业劳动力逐渐减少,转向其他行业,而水果采摘在农业生产中有很多弊端:第一是采摘中需要大量人力;第二是采摘是相对耗时长的一个生产环节;第三,采摘水果大都集中在一个时段;第四,人工采摘水果果实需要弯腰或者爬高,具有一定的危险性。随着我国科技水平和农业机械化水平的逐步提高,用机械手来采摘水果果实成为可能,这样不仅解放了农村劳动力,而且更加安全,方便。 国内外研究现状:随着科技的进步,近年来,国外在果蔬采摘机器人的研究方面取得不少成果,但由于技术,市场和价格多方面因素的影响,此类研究工作基本停顿,国内研究此类型的方面起步晚,相对来说成果少,对苹果的采摘方面研究还很缺乏。随着农业产业化发展进程加快,其种植越来越规模化,然而苹果的采摘大部分还处于人工作业的情况,这大大降低了采摘效率,提高了成本,而且苹果高度不一,人工采摘费时费力,容易疲劳,发生危险,所以对苹果采摘设备的研究有重要意义[1]。 本文以苹果为研究对象,讨论苹果采摘装置,最终目标是确保顺利采下苹果,提高劳动效率,解放生产力。设计一种实用的苹果采摘机械手,用于采摘苹果果实。该机械手结构轻巧,操作灵活简便。并且可以运用传感器和单片机实现智能采摘。 1.苹果采摘机械手的方案设计 1.1 移动平台选取
第二章 神经网络 2.1神经网络基础 人的大脑中有众多神经元,它们连接在一起组成复杂的神经网络,因此大脑拥有高级的认知能力。人工神经网络实际上是对人大脑处理信息方法的简单化。 2.1.1神经网络概述 神经网络是推广众多简单处理单元构成的一种非线性动力学系统,能够大规模地进行信息分布式存储和并行处理。同时神经网络具有自学习的能力,当外界的环境发生了改变,神经网络经过训练能够在外界信息的基础上自动调整内部结构,对于给定的输入可以得到期望输出。 由图可知,神经元是一种性质为多输入单输出的系统,是由n 个输入i x 和一个输出j y 组成。 图2-1 神经元结构 j u :第j 个神经元的状态; j :第j 个神经元的阈值; i x :第i 个神经元的输入信号; ji w :第i 个神经元到第j 个神经元的连接权系数; 其中:激发状态时ji w 取正数,抑制情况下ji w 取的是负值;
j s :第j 个神经元的外部输入信号。 输出可以表示为 1n j ji i j j i Net w x s θ==+-∑ (2.1) ()j j u f Net = (2.2) ()()j j j y g u h Net == (2.3) 一般(.)g 是单位映射,也就是说()j j g u u = 。 j Net 表示第j 个神经元的输入; (.)f 表示第j 个神经元的激励函数; (.)g 表示第j 个神经元的输出函数。 激活函数往往采用这三种函数: (1)二值函数(阈值型): 1,0()0,0x f x x >?=?≤? (2.4) (2) S 型函数: 1 ()1x f x e α-= +,0()1f x << (2.5) (3)双曲正切函数: 1()1x x e f x e αα---=+,1()1f x -<< (2.6) 2.1.2神经网络的分类 以连接方式对神经网络可分为两大类:一是没有反馈的前向网络,二是相互结合型网络(含有反馈网络)[10]。 (1)前向神经网络
目录 前言 (1) 1绪论 (2) 1.1水果采摘机械的发展 (2) 1.2水果采摘机械的研究应用现状 (2) 1.2.1国内研究现状分析 (2) 1.2.2国外研究现状分析 (2) 1.3本课题需要重点研究的、关键的问题及解决的思路 (3) 1.3.1设计所设计的任务要求 (3) 1.3.2设计重点研究的内容 (3) 1.3.3存在问题的解决思路 (3) 2苹果采机械移动系统的结构说明 (3) 2.1工作原理 (3) 2.2工作过程 (4) 3电动机的选择计算 (4) 3.1确定电动机的功率 (4) 3.2确定电动机型号 (4) 3.3各级轴转速 (4) 3.4各轴输入功率 (4) 3.5各轴的输出功率 (4) 3.6各轴输入转矩 (4) 4齿轮的设计 (5) 4.1确定许用应力 (5) 4.2按齿面接触强度设计 (5) 4.3验算齿面接触强度 (6) 4.4齿轮圆周速度 (6) 5轴的结构设计计算 (6) 5.1减速器高速轴设计 (6) 5.1.1轴径与长度与直径 (6) 5.1.3确定轴上圆角及倒角 (7) 5.1.4减速器输入轴(高速轴)的校核 (7) 5.2减速器低速轴设计 (10) 5.2.1轴Ⅱ的结构设计 (11) 5.2.2轴上零件的周向定位 (11) 5.2.3确定轴上圆角及倒角 (11) 5.2.4减速器输出轴(低速轴)校核 (11) 6链轮的设计 (14) 7联轴器的选 (14) 小结 (15) 致谢 (16) 参考文献 (17)
前言 水果是人类生活不可少的食物,种植面积和产量逐年提高。现在我国已成为世界水果、蔬菜的第一生产大国。到2000年,水果种植面积达867万公顷,占世界面积的8%;产量6237万吨,占世界产量的13%。苹果和梨的产量连续8年居世界首位,柑桔产量在巴西和美国之后位居第三,荔枝产量占世界的70%。蔬菜种植面积达1467万公顷,占世界面积的35%;产量4亿吨,占世界产量的66%,连续5年居世界第一。目前水果总产量已超过6000万吨,约占全球产量的14%左右,成为我国继粮食、蔬菜之后的第三大种植产品,也日益成为农民增收的重要增长点。 改革开放以来,特别是1984年水果市场放开之后,国家对水果实行多渠道经营,价格随行就市,农民得到了实惠,极大地调动了果农发展生产的积极性,从而促进了水果生产的迅速发展。“七五以来,水果生产连续保持了十多年高速发展的势头,从生产、加工到销售乃至出口创汇都取得了巨大成绩,在种植业中异军突起,已经成为种植业重要的支柱产业,在农业和农村经济中的作用和地位日益显著主要表现在以下几个方面:1)面积和产量成倍增长,据国家统计局统计1996年全国果园面积发展到853.3多万平方米,总产量达 462.8万吨。分别比1984年增长2.9倍和3.7倍。其中苹果面积298.7万万平方米,产量170.2万吨,分别比1984年增长 3倍和4.8倍;柑桔面积128万平方米,产量845.7万吨,分别比1984年增长2.2倍和4.6倍;梨的面积为93.1万亩。产量580.7万吨,分别比1984年增长2.1倍和1.8倍我国水果在世界水果生产中占据重要的位置从1993年开始,我国水果总产量跃居世界第一位(超过印度、巴西和美国)。与同期世界水果产量相比1995年我国水果总产量为1214.6万吨,占世界总产量3987.3万吨的10.6%。其中苹果和梨的产量均居世界各国之首,苹果产量占世界总产量的 28.2 %,梨的产量约占42.6%。柑桔占世界总产量的9.2 %,仅次于巴西和美国,列第三位。2)品种结构明显优化,近年来,各地在发展大宗水果的同时,以市场为导向,以科技为依托,以效益为目标,积极发展名特优新品种。加速低产劣质果园的改造。从而使品种结构得到明显改善,果品质量不断提高。苹果重点发展了红富士、新红星、乔纳金等优新品种。目前,全国红富士苹果面积已发展到130.5万亩,1996年的产量近600万吨,分别占苹果面积和产量的43.7和35.1;柑桔主要发展了特早熟和早熟温州蜜柑、芦柑、脐橙、柚类等市场受欢迎的优新品种。目前,山东省的红富士、新红星、乔纳金、嘎拉等优新苹果品种已占苹果面积75以上。广东省的柑桔因黄龙病的危害效益有所下降,对此,他们加大了结构调整的力度,开发的重点转向粤西、粤东和粤北山区,因地制宜地发展了荔枝、龙眼、杜果、田柚等热带亚热带名特优水果,这既丰富了果品市场,又发展了山区经济。 自20世纪90年代以来,自走式农业机械的田间自动导航、机器视觉与农业机器人研究得到重视,成为探索在农业机械装备中应用智能控制等高新技术研究的重要方向。农业机器人是一种高度自动化智能化的农业机械,它集传感技术、监测技术、人工智能技术、通讯技术、图像识别技术、精密及系统集成技术等多种前沿科学技术于一身,代表了机电一体化的最高水平。作为农业生产领域中新一代的生产工具,农业机器人在提高农业生产力、改变农业生产模式、解决劳动力不足问题等方面显示出极大的优越性。可以说农业机器人的应用将带来农业生产的一次技术革命,推动现代农业的发展。因此,广泛应用以农业机器人为代表的新一代农业机械,抓住机遇,大力发展农业机械化,全面提高农业信息化智能化水平是实现我国农业持续稳定健康发展的必然道路。
龙源期刊网 https://www.doczj.com/doc/229768939.html, 基于自动化的苹果采摘机器人 作者:刘国栋杨孟杰张应红孙元广 来源:《科学与财富》2019年第20期 摘要:苹果是具有长久的季节性的水果,且人工采摘的劳动强度大,风险高,成本高。 解决人工采摘苹果的问题需要将农业与工业智能化的结合。为此设计一种五自由度,满足工作空间的基于自动化的苹果采摘机器人。该机器人通过工业摄像机、红外线探头采集外部环境信息,并传递到电源控制模块,从而控制以步进电机、舵机的源动力的驱动,进一步控制各个机械臂和机械手的转动调节,实现对苹果的自动化的采摘。 关键词:采摘苹果;自动化;工业摄像机;机械手 引言:随着农业生产的多样化和精确化、规模化,农业生产作业要求也正在逐渐提高,加速农业现代化进程,实施智能化农业,广泛应用农业机器人,提高资源利用率和农业产出率,降低劳动强度,提高经济效率将是现代农业发展的必然趋势。对于降低人工劳动强度和采摘成本、保证苹果适时采收,研究满足工作空间的自动化采摘机器人对实现农业自动化和提高经济效益具有重大的意义。 1.苹果采摘机器人的机械结构设计 1.1机器人的方案设计: 采摘机器人的机械结构图主要由底座、腰部,大臂,肘部,小臂,末端机械手等主要部分组成,其总体结构简图1.1所示。该机器人与传统的工业机器人类似,具有五个自由度的工作空间,分别是自由度1(腰部回转),自由度2(大臂旋转),自由度3(小臂旋转),自由 度4(肘回转),自由度5(机械手旋转)。 1.2移动平台方案的确定: 在确定设计方案以后对机器人的移動载体采取分析并进行选择。 (1)履带式移动平台特点及存在问题 特点 a. 转向半径小,可实现原地转向。 b.支撑地面的面积大,下陷度小,滚动阻力大,越野机动性能好;在松软或者潮湿的土地环境中具有较好的越障能力。 c.履带支撑面上有很多履齿,行走时不容易打滑,附着性能好;。
果实采摘机器人有关论文-刘今朝
果实采摘机器人有关论文 机化141 刘今朝 摘要:果园收获作业机械化、自动化是广大果农关注的热点问题。进行果树采摘机器人研究,不仅对于适应市场需求、降低劳动强度、提高经济效率有着一定的现实意义,而且对于跟踪世界农业新技术、促进我国农业科技进步,加速农业现代化进程有着重大的意义。 关键词:果树采摘机器人现状,发展,常见问题等。 机器人技术是一门新兴的多学科交叉的综合性高新技术,涉及机构学、机械设计学、自动控制、传感技术、计算机、人工智能、仿生学等多个学科领域。机器人作为高自动化、智能化的机电一体化设备,通过计算机编程能够自动完成目标操作或移动作业,具有较高的可靠性、灵活性。因此,机器人技术已成为当今应用广泛、发展迅速和最引人注目的高新技术之一。 随着科学技术的发展和社会的进步,机器人技术已经广泛应用于工业、农业、国防、科技等各个领域。在农业生产中,由于易对植被造成损害、易污染环境等原因,传统的机械通常存在着许多的缺点。为了解决这个问题,国内、外都在进行农业机器人的研究,对农业机器人的需求极其迫切。就我国而言,机械化、自动化程度比较落后。农业机器人的问世,有望改变传统的劳动方式,改善农民的生活劳动状态。因此,世界各国对农业机器人非常重视,投入了大量的资金和人力进行研究开发。农业机器人在农业领域得到很大进展,其功能已经非常完备。农业机器人正在或已经替代人的繁重体力劳动,可以连
续不间断地工作,极大地提高了劳动生产率,是农业智能化不可缺少的重要环节。 采摘机器人是21世纪精确农业的重要装备之一,是未来智能农业机械的发展方向。采摘机器人是针对水果和蔬菜,可以通过编程来完成这些作物的采摘、转运、打包等相关作业任务的具有感知能力的自动化机械收获系统,是集机械、电子、信息、智能技术、计算机科学、农业和生物等学科于一体的交叉边缘性科学,需要涉及机械结构、视觉图像处理、机器人运动学动力学、传感器技术、控制技术以及计算信息处理等多方面的学科领域知识。 果实采摘机器人特点: (1) 作业对象的非结构性和不确定性; (2) 作业对象的娇嫩性和复杂性; (3) 良好的通用性和可编程性; (4) 操作对象和价格的特殊性。 果树采摘机器人操作者是农民,不是具有机电知识的工程师,因此要求果树采摘机器人必须具有高可靠性和操作简单的特点;另外,农业生产以个体经营为主,如果价格太高,就很难普及。 国外研究进展 ①日本的西红柿采摘机器人 日本的果蔬采摘机器人研究始于1980年,他们利用红色的番茄与背景(绿色)的差别,采用机器视觉对果实进行判别,研制了番茄采摘机器人。该机器人有5个自由度,对果实实行三维定位。由于不是
苹果采摘机器人仿生机械手静力学分析与仿真 崔鹏;陈志;张小超 【期刊名称】《农业机械学报》 【年(卷),期】2011(042)002 【摘要】A humanoid manipulator applying to the end effector of an apple picking robot was introduced. Substituting a tendon-actuated manipulator for the simple gripper can improve the adaptability for the end effector to catch apples in intricate surroundings. To realize the open-loop control of the tendon-actuated manipulator, the relationship model of the actuating force and grasping force is necessary. By simulation, the model was established in this paper. Under the same actuating force, the grasping force of the tendon-actuated humanoid manipulator was related to the parameters of mechanism. The virtual grasping force was determined by the length and thickness of fingers. The distribution of grasping force was determined by the lengthy proportions of the phalanges. The original angle between the fingers determined the radius range of the apples. As the radius of apples increased, the virtual grasping force decreased. Frictions could homogenize the distribution of grasping force as well as enlarge the virtual force.%提出了一种应用于苹果采摘机器人末端执行器的仿生机械手.采用腱传动式仿生机械手取代了简单的夹具,提高了末端执行器在复杂环境中抓取苹果的适应性.建立了腱传动式机械手开环控制的驱动力和抓握力间的力学模型.
苹果采摘简易机械手设计说明书 一、引言 近年来,随着农业产业机构得调整,林果生产已经成为很多地区经济发展与农民增收得支柱产业,随着种植面积得不断扩大,果园规模化发展与规范化管理得要求日益提高,从而果园机械化日益重要。果园收获机械得发展,可以减轻果农得劳动强度,提高生产效率,节约劳动成本,提高经济效益。由于我国果园作业机械研究起步较晚,基础相对较差,因此,果园作业机械化程度与欧美等国家还就是存在差距。所以,针对我国各地林果生产特点研究相应得作业机械,对林果产业得发展有重要意义。 我国就是世界第一大水果生产国,也就是世界第一大水果消费国。水果种植业得迅速发展提升了果园机械得市场需求。采摘作业所用劳动力占整个生产过程所用劳动力得33%~50%,目前我国得水果采摘绝大部分还就是以人工采摘为主。采摘作业比较复杂,季节性很强,若使用人工采摘,不仅效率低、劳动量大,而且容易造成果实得损伤,如果人手不够不能及时采摘还会导致经济上得损失。使用采摘机械不仅提高采摘效率,而且降低了损伤率,节省了人工成本,提高了果农得经济效益,因此提高采摘作业机械化程度有重要得意义。随着现代农业机械化生产,大面积得种植果树,农民朋友得农产品获得丰收,果实得采摘问题也凸显而出,在面对果树高而无法采摘造成了苹果得摔落,因而这些苹果无法上市进行出售,为解决高空采摘苹果难,故设计此苹果采摘简易机械手来解决此问题. 二.项目设计得内容 (1)果蔬收获机器人作业环境与工作对象得特殊性 工业领域就是机器人技术得传统应用领域、由于在工业生产中,机器人得工作位置与障碍往往都能够事先预知,因此机器人得性能能得到很好得体现。与工业机器人相比,果蔬收获机器人有很多独特得特点,主要表现在: (1)作业环境得非结构性收获机器人得工作环境往往就是非结构性得、未知得与不确定得、例如,机器人所处得地势可能崎岖不平,天气条件(如光照)也可能随时改变.即使在温室环境中,也必须考虑温度、湿度、天气以及其它环境参数得影响。在这种复杂多变得环境条件中,机器人必须具有智能化得传感、规划与控制能力,要有很强得自适应能力。 (2)作业对象得个体差异与随机分布性果蔬收获机器人得首要任务就是识别与定位水果,而果实有得可能单个生长,有得则就是一簇一簇得,形状、尺寸、颜色、成熟度也都不一样,而且果实总就是随机分布在田地、藤蔓或树枝上,有得可能被茎杆与叶子遮挡,还要遇到不同得自然条件,如刮风可能导致果实摇动而不断改变其
基于神经网络的多任务学习机器人 目前绝大多数智能机器人具有较高的鲁棒性,但其基于具体行为的实现方法都需要程序员对相应的任务进行手工编程。然而,环境是复杂多样的,而要使得机器人能够在多种环境下进行任务,需要程序员将各种情况考虑在内,这样的系统对环境并不具有适应性,让机器人的应用受到了局限。基于此,提出的自主学习机器人以类人形机器人为基本模型,以神经网络为基础,通过人体对机器人进行示范,训练一个能识别人关节姿态的完备的神经网络。当机器人身处不同环境执行任务时,能够做出适应环境变化的动作。为此所设计的学习机器人系统的特色就在于使用神经网络具有学习能力,提高机器人对环境的适应能力,从而让任务执行更加灵活,使得机器人拥有更广阔的应用前景。 标签:自主学习;神经网络;姿態识别;机器人 doi:10.19311/https://www.doczj.com/doc/229768939.html,ki.16723198.2017.01.092 1引言 1.1机器人在现代社会中的重要性 随着城乡居民消费结构的持续升级,以及智慧中国战略的不断推进,智能机器人在家庭、农业、工业等生活的方方面面都有着极其广泛的应用。随着社会的不断发展,社会分工越来越细,与此同时工作也变得越来越单调。另外,社会上有些工作风险较高,若让人去做,不仅效率不高,而且更会产生生命危险。在这样高风险的作业领域,对机器人的需求越来越高。在这一背景下,各种各样的机器人被研制了出来,用它们代替人来完成枯燥、单调、高风险的工作。这极大的提高了劳动生产率和生产质量,创造出了更多的社会财富。 同时,社会服务也对机器人产生了大量的需求。从公共服务方面来说,目前我国老龄人口已超过总人口的10%,人口老龄化问题已成为中国需要面临的重大课题。此外,我国残疾人口占总人口的比重也位居世界较高国家之列。机器人的运用,可以为他们提供大量的护理服务,提高他们的生活质量。在医疗服务方面机器人也有很大的优势,手术机器人凭借其操作的精度及可长期工作等特性广泛应用于手术操作中。总而言之,机器人已成为我们的社会不可取代的一部分。 1.2当前机器人领域的现状及弊端 目前机器人正处于快速发展的阶段,但目前市场上的机器人仍存在着许多弊端。传统机器人需要设计者针对具体的任务进行手工编程,为了使机器人在环境改变时也能完成任务,设计者就需要尽量将各种情况考虑在内。但是这样的机器人存在一些问题:一方面程序员无法穷尽所有的可能情况,另一方面环境的复杂性也无形中加大了机器人可能出故障的概率,这使得机器人缺乏良好的环境自适应能力,给机器人的广泛应用带来了很大的限制。
摘要 本文设计了一种苹果采摘机器人的末端执行器。该执行器的夹持机构为一个三欠驱动仿生机械手。使用钢丝作为传动腱可以将驱动部分和执行部分分离,将驱动部分置于远端,减轻了机械臂末端的重量,同时增加了驱动电机选择的灵活性。 首先,对机械手的运动学进行了分析。其次,对机械手抓取稳定性的基本理论问题进行了分析和讨论,建立了抓取模型,为设计机械手的稳定抓取提供了理论依据。最后,对机械手的机械部分和控制部分进行了设计。 该末端执行器采摘方案合理有效、总体性能可满足机器人采摘苹果的要求。 关键词:苹果采摘机器人;末端执行器;机械设计
ABSTRACT This article is designed to end an apple picking robot. The actuator clamping mechanism is a three-under-drive bionic robot. As the use of steel tendons can drive the drive part and the operative part of the separation, the driving portion is placed in the distal end of the arm to reduce the weight, while increasing the flexibility of selection of the drive motor. First, the robot kinematics is analyzed. Secondly, the stability of the robot to crawl the basic theory problems are analyzed and discussed the establishment of a crawl model, designed to stabilize the crawling robot provides a theoretical basis. Finally, the part and the control part of the mechanical robot was designed. The program end picker reasonably effective to meet the overall performance requirements of apple picking robot. 关键词:Apple picking robot; end effector; mechanical design
果树采摘机器人的发展现状及运动学分析 专业:机械制造与自动化 学生:张长峰 指导老师:周威铎 完成日期:2013.4.10
摘要 果园收获作业机械化、自动化是广大果农关注的热点问题。进行果树采摘机器人研究,不仅对于适应市场需求、降低劳动强度、提高经济效率有着一定的现实意义,而且对于跟踪世界农业新技术、促进我国农业科技进步,加速农业现代化进程有着重大的意义。 果树采摘机器人是一个集环境感知、动态决策与规划、行为控制与执行等多种功能于一体的综合系统,它是由机械手固定在履带式移动平台上构成的一类特殊的移动机器人系统。本文在以自行设计的机器人机械结构为研究对象,对果树采摘机器人的控制系统进行了分析、研究和设计,并对采摘机器人避障技术进行了探讨。主要工作如下: 分析了果树采摘机器人机械结构,介绍了机器人运动学理论,根据自行设计的5自由度机械臂机械特性,采用几何结构算法,建立了果树采摘机器人机械臂的正、逆运动学方程。 关键词:果树采摘机器人,机械结构,运动学分析等等。
ABSTRACT Orchard mechanized and automation harvesting operations have become the hot issue of majority fruit growers concerned.Develop the fruit harvesting robot research not only has a certain degree of practical significance to meet market demand and reduce labor intensity and improve economic efficiency, but also can to track new agricultural technologies of the world. It is important to promote China's agricultural scientific and technological progress, accelerate the agricultural modernization process. Fruit harvesting robot is an integrated system that has multiple functions such as environmental apperceive,dynamic decision making, planning conduct control and implementation. It is a special kind of mobile robot system that the mechanical hand was fixed in the track type mobile platform. This paper was supported by the National “863” Project: “research on fruit harvesting robot’s key technologies”. A self-designed robot mechanical structure was uesd as the study object.Analysis, research and design was progressed for the fruit harvesting robot's control system. The adaptive fuzzy PID controller was composed by PID control method combined with fuzzy logic control method and the controller was used in fruit harvesting robot visual servo control.At the same time the technology of harvesting robot’s control and obstacle avoidance was analysed.The main research contents as follows: the mechanical structure of the fruit harvesting robot was analysed and the theory of robot kinematics was introduced. Based on the self-design 5 degrees of freedom robot manipulator’s mechanical properties, the fruit harvesting robot’s positive and inverse kinematics equations were found using the geometric structure of the algorithm. KEY WORDS: fruit harvesting robot, obstacle avoidance, sensor and so on.
基于机器人的递归神经网络运动规划 文章研究机器手臂的重复运动规划问题,在考虑关节角度极限和关节速度极限的情况下,将此模型转化为一个含不等式约束的二次规划问题,并利用简化对偶神经网络来求解该问题,从而实现机器手臂的关节重复运动。 标签:冗余机械臂;重复运动规划;二次规划;对偶神经网络 4 数值仿真 本节以平面六连杆冗余机械臂末端执行器作来回直线运动为例进行计算机仿真验证。直线长度为1m,观察其关节轨迹能否重合。末端执行器的运动周期为8s,关节变量的初始状态为:?兹(0)=(0,-?仔/4,0,?仔/2,0,-?仔/4)T弧度。仿真结果如图1所示,从图1也可以看出,在经过8s周期运动之后,平面六连杆机器手臂的各自关节状态都回到初始状态;仿真结果达到预期的目的,且其最大位置误差不大于1.79×10-6。可见,利用所提出的规划解析方案对带关节物理约束的机械臂进行重复运动规划是可行、有效的。 5 结束语 针对平面冗余机械臂重复运动规划问题,文章首先将机械臂重复运动问题转化为一个二次型规划问题,该二次规划方案可避开传统的伪逆解析方案难以求逆的问题,然后利用一种简单对偶神经网络来求解该含不等式约束的二次规划问题,该实现算法具有并行 性、快速实时处理能力和电路实现性。 6 致谢 感谢中山大学张雨浓教授提供相关源程序。 参考文献 [1]Malysz P,Sirouspour S.A kinematic control framework for single-slave asymmetric teleoperation systems. IEEE Transactions on Robotics,2011,27(5):901-917. [2]张智军,张雨浓.重复运动速度层和加速度层方案的等效性[J].自动化学报,2013,39(1):88-91. [3]Zhang Y N,Xie L,Zhang Z J,Li K N,Xiao L.Real-time joystick control and experiments of redundant manipulators using cosine-based velocity mapping. Proceedings of the 2011 IEEE International Conference on Automation and Logistics.
采摘机器人设计开题报告 本科毕业设计开题报告 1.本课题的概述一.课题研究的目的和意义在果蔬生产作业中,收获采摘约占整个作业量的40%,采摘作业质量的好坏直接影响到果蔬的储存、加工和销售,从而最终影响市场价格和经济效益。于采摘作业的复杂性,采摘自动化程度仍然很低,目前国内果蔬采摘作业基本上还是手工完成。随着人口的老龄化和农业劳动力的减少,农业生产成本的提高,果蔬采摘这个问题已经慢慢被人们所重视。近些年来,陕西省已成为全国苹果产量大省。白水、礼泉、洛川、等地的果农们有的每户每年大多需要手工收获5-10万多斤的苹果,采摘劳动强度大,非常辛苦。摘果时常因上梯或上树而感到非常劳累不便,也常听到有人不慎从树上或梯子上掉下来的消息,这就对果农们的安全生产带来不便。所以,设计一种既能有效采摘果实又能减轻果农劳动负担的小型实用机械就显得非常重要了。目前市面上此类工具很少,况且有很多弊端。因此,设计一种更为先进的果实采摘机对实现农业机械自动化和提高农业生产效率有重大意义。二.本课题国内外研究状况分析收获作业的自动化和机器人的研究始于20世纪60年代的美国,采用的收获方式主要是机械震摇式和气动震摇式,其缺点是果实易损,效率不高,特别是
无法进行选择性的收获。从20世纪80年代中期开始,随着电子技术和计算机技术的发展,特别是工业机器人技术、计算机图像处理技术和人工智能技术的日益成熟,以日本为代表的发达国家,包括荷兰、美国、法国、英国、以色列、西班牙等国家,在收获采摘机器人的研究上做了大量的工作,试验成功了多种具有人工智能的收获采摘机器人,如番茄采摘机器人、葡萄采摘机器人、黄瓜收获机器人、西瓜收获机器人、甘蓝采摘机器人和蘑菇采摘机器人等。在国内,果蔬采摘机器人的研究刚刚起步。东北林业大学的研究人员研制了林木球果采摘机器人,主要5自度机械手、行走机构、液压驱动系统和单片机控制系统组成。采摘时,机器人停在距离母树3-5m处,操纵机械手回转马达对准母树。然后,单片机控制系统控制机械手大、小臂同时柔性升起达到一定高 度,采摘爪张开并摆动,对准要采集的树枝,大小臂同时运动,使采摘爪沿着树枝生长方向趋近,然后采摘爪的梳齿夹拢果枝,大小臂带动采集爪按原路向后返回,梳下枝上球果,完成一次采摘。这种机器人效率是500kg/天,是人工的30-50倍。而且,采摘时对母树的破坏较小,采净率高。通过上文不难看出,国内外专家在果蔬采摘机器人这一领域都有不同程度的研究。 2.课题总体方案设计一.苹果采摘机基本组成控制机构动力系统苹果采摘机
第一部分 机器人手臂的自适应神经网络控制 机器人是一具有高度非线性和不确定性的复杂系统,近年来各研究单位对机器人智能控制的研究非常热门,并已取得相当丰富的成果。 机器人轨迹跟踪控制系统的主要目的是通过给定各关节的驱动力矩,使得机器人的位置、速度等状态变量跟踪给定的理想轨迹。与一般的机械系统一样,当机器人的结构及其机械参数确定后,其动态特性将由动力学方程即数学模型来描述。因此,可采用经典控制理论的设计方法——基于数学模型的方法设计机器人控制器。但是在实际工程中,由于机器人模型的不确定性,使得研究工作者很难得到机器人精确的数学模型。 采用自适应神经网络,可实现对机器人动力学方程中未知部分的精确逼近,从而实现无需建模的控制。下面将讨论如何利用自适应神经网络和李雅普诺夫(Lyapunov )方法设计机器人手臂跟踪控制的问题。 1、控制对象描述: 选二关节机器人力臂系统(图1),其动力学模型为: 图1 二关节机器人力臂系统物理模型 ()()()()d ++++=M q q V q,q q G q F q ττ (1) 其中 123223223222cos cos ()cos p p p q p p q p p q p +++??=??+??M q ,3223122312sin ()sin (,)sin 0p q q p q q q p q q --+??=???? V q q
41512512cos cos()()cos()p g q p g q q p g q q ++??=??+?? G q ,()()0.02sgn =F q q ,()()0.2sin 0.2sin T d t t =????τ。 其中,q 为关节转动角度向量,()M q 为2乘2维正定惯性矩阵,(),V q q 为2乘2维向心哥氏力矩,()G q 为2维惯性矩阵,()F q 为2维摩擦力矩阵,d τ为未知有界的外加干扰,τ为各个关节运动的转矩向量,即控制输入。 已知机器人动力学系统具有如下动力学特性: 特性1:惯量矩阵M(q)是对称正定阵且有界; 特性2:矩阵(),V q q 有界; 特性3:()()2,-M q C q q 是一个斜对称矩阵,即对任意向量ξ,有 ()()()2,0T -=ξM q C q q ξ (2) 特性4:未知外加干扰d τ 满足 d d b ≤τ,d b 为正常数。 我们取[][]212345,,,, 2.9,0.76,0.87,3.04,0.87p p p p p kgm ==p ,两个关节的位置 指令分别为()10.1sin d q t =,()20.1cos d q t =,即设计控制器驱动两关节电机使对应的手臂段角度分别跟踪这两个位置指令。 2、传统控制器的设计及分析: 定义跟踪误差为: ()()()d t t t =-e q q (3) 定义误差函数为: =+∧r e e (4) 其中0>∧=∧T 。 则 d =-++∧q r q e
苹果采摘机械人结构设计 水果采摘费用高且劳动量大,为了快速且准确完成苹果采摘任务,需要进行水果采摘机械人结构设计。首先进行采摘机械机构选型,确定合适自由度;其次,依据典型果树轮廓确定采摘臂结构尺寸,绘制采摘机械手臂零件图和装配图;最后,搭建采摘机械人结构试验台,进行实体运动和抓取实验对设计效果进行验证。试验结果表明,该设计方案基本能够达到预期。该设计方法,对农业领域其他类型采摘机械手设计有一定参考价值。 标签:采摘机械手臂;苹果;结构设计 引言 水果采摘季节性强、费用高且劳动量大[1]。加速农业现代化进程,实施“精确”农业,广泛应用农业机器人,提高资源利用率和农业产出率,降低劳动强度,提高经济效率将是现代农业发展的必然趋势。研究采摘机械人,对于降低人工劳动强度和采摘成本、保证水果适时采收,具有重大的意义[2]。我国从上世纪70年代开始研究水果蔬菜类的采摘机械,并且也逐渐起步,如上海交通大学已经开始了对黄瓜采摘机器人的研制[3],浙江大学对番茄采摘机器人进行了结构分析与设计的优化[4],中国农业大学对采摘机器人的视觉识别装置进行了研究[5]。目前,我国研究的采摘机器人还有西红柿、橘子、草莓、荔枝和葡萄采摘机器人等[6-8]。文章对苹果采摘机械手臂进行选型,进一步进行详细结构设计,最后对设计结果进行试验验证。 1 机械人机构选型及自由度的确定 由于采摘机械人的作业对象是苹果,质量轻,体积小,故而可选择较为简单、灵活、紧凑的结构形式。 根据机械人手臂的动作形态,按坐标形式大致可将机械人手臂部分分为以下四类[9]:直角坐标型机械手;圆柱坐标型机械手;球坐标(极坐标)型机械手;多关节型机械手。采摘机械臂的结构型式选取主要取决于机械人的活动范围、灵活性、重复定位精度、持重能力和控制难易等要求。以上四种型式,它们的活动范围和灵活度逐渐增大。经过对苹果采摘空间的研究,结果表明,苹果树树冠和底部的苹果分布极少,大多分布在树冠中部,大约有80%以上的苹果分布在距地面垂直高度1-2m、距树干左右方向1-2m的空间范围内,且阴阳两面的苹果分布率并无明显的差异。这就要求采摘机械手应当具有较大的工作空间,因此选用多关节型机械手较为合适,且其占地面积较小,更加适合苹果采摘作业。 实际中,苹果生长位置随机分布,这就要求机械臂的末端执行器能够以准确的位置和姿态移动到指定点,因此,采摘机械人还应具有一定数量的自由度。机械臂的自由度是设计的关键参数,其数目应该与所要完成的任务相匹配。一般来说,自由度数量越多,机械臂的灵活性、避障能力越好,通用性也越广,但增加
2006年第8期农业装备与车辆工程基于神经网络的移动机器人避障控制和决策 伊连云,金秀慧,贺廉云,王慧 (德州学院机电工程系,山东德州,253015) 摘要:针对移动机器人避障的特点,提出了一种基于神经网络的动态避障控制方法。介绍了避障行为的决策、基于神经网络的机器人在避障过程中的运动控制等。该方法不用考虑障碍物的运动状态,简化了机器人避障的步骤,机器人能够根据各种情况灵活地判断是否避障以及灵活地选择适当的避障方式,提高了机器人避障的灵活性和鲁棒性。仿真试验证明这种方法是可行而有效的。 关键词:移动机器人;神经网络;避障中图分类号:TP24 文献标识码:A 文章编号:1673-3142(2006)08-0022-03 MobileRobotObstacleAvoidanceControlandDecisionBasedonNeuralNetwork YiLianyun,JinXiuhui,HeLianyun,WangHui (DepartmentofElectromechanicEngineering,DezhouUniversity,Dezhou253015,China) Abstract:Accordingtothecharacteristicsofthemobilerobotinobstacleavoidance,amethodofdynamicobstacleavoidancebasedonneuralnetworkispresented.Thisarticlepresentsthedecisionofobstacleavoidancebehavior,robotmovingcontrolbasedonneuralnetworkduringobstacleavoidanceprocess.Thismethoddoesnotnecessarilytakethevelocityandthedirectionoftheobstaclesintoaccount,sopredigeststheprocedureofobstacleavoidance.Therobotcanjudgeflexiblywhetheritneedstoavoidtheobstacleandcanchooseproperwaysofobstacleavoid-anceaccordingtodiversifiedcircumstances.Itimprovesflexiblyandadaptivelytherobotobstacleavoidance.Theexperimentofsimulationindicatesthatthemethodisfeasibleandvalid.KeyWords:mobilerobot;neuralnetwork;obstacleavoidance 收稿日期:2005-12-19 作者简介:伊连云(1974-),女,山东德州人,硕士,讲师,主要研究领域为自动控制及人工智能。 农业装备与车辆工程 AGRICULTURALEQUIPMENT&VEHICLEENGINEERING 2006年第8期(总第181期) No.82006(Totally181) 0引言 随着移动机器人的应用领域不断扩大,人们希望机器人能够在未知环境中自动实现路径规划,以大大提高其对环境的适应能力。避障是移动机器人运动规划中的基本问题之一,一直以来都是机器人路径规划中的难点。根据机器人对环境信息知道的程度不同,可分为两种类型:环境信息完全知道的全局路径规划和环境信息完全未知或部分未知的局部路径规划。对于已知环境下的避碰问题,已经提出了许多有效的解决方法。其中,Khatib提出的人工势场法,结构简单,易于实现,得到了广泛应用。但人工势场法主要存在陷阱区域,栅格法空间分辨率、时间复杂度与内存容量、实时性要求之间的矛盾限制了它的使用。近年来,一些生物进化算法被用于机器人的避碰与路径规划研究,如人工神经网络、遗传算 法、模拟退火算法、蚂蚁算法等。与在已知环境中相比,机器人在环境完全未知或部分未知情况下实现避障更加困难。针对环境信息不确定情况下的避障问题,本文提出一种机器人的动态避障方法,该方法是以机器人与障碍物之间的相对运动作为决策依据,不用考虑障碍物的运动状态,简化了机器人避障的步骤;另外,机器人能够根据各种情况灵活地判断是否避障以及灵活地选择适当的避障方式,使机器人在躲避碰撞的前提下能快速地跟踪规划路径。 1避障行为的决策 机器人在运动过程中需要对碰撞的危险性进行判断并以此作为机器人避障行为选择的依据。图1a给出了机器人的扇形视野区域。机器人把所有的障碍物都看作运动体,通过检测障碍物的历史位置与当前位置的相对关系,来判断机器人是否会与障碍物相撞,判断步骤如下: (1)连接历史点与当前点,并延长至与扇形区相交,当交点在扇形的弧线上,标志障碍物正远离物 ?22? 资料整理自互联网,版权归原作者! 欢迎访问 https://www.doczj.com/doc/229768939.html, 新势力单片机、嵌入式