上海交通大学
硕士学位论文
GPS信号实时处理系统设计与实现
姓名:滕依良
申请学位级别:硕士
专业:微电子学与固体电子学
指导教师:李振波
20090101
GPS信号实时处理系统设计与实现
摘要
全球定位系统(Global Positioning System, GPS) 作为一个具有在海、陆、空进行全方位实时三维导航与定位能力的卫星系统,其应用价值和市场需求正变得越来越大,成为众多国内外公司和科研机构的研究对象。GPS 导航定位新算法的开发与验证工作得到了普遍的重视。本文通过对GPS系统结构和信号处理流程的仿真,研究通过可编程器件FPGA和嵌入式ARM微控制器构建GPS实时处理平台,实现GPS系统软硬件的模块化、可编程化及可移植化。
首先,介绍了GPS系统的组成和信号结构,使用Matlab实现GPS信号处理的算法开发并进行可行性验证。继而通过SystemC/TLM完成系统的交易级建模,借助于对软硬件协同仿真结果的分析,合理划分软件系统与硬件系统的模块,奠定系统总体软硬件架构。随后将硬件模块逐步细化至寄存器传输级,最终在FPGA上实现12通道中频数字相关器;而ARM上软件模块通过采取合理的调度方案,实现对GPS信号处理系统的实时控制,完成GPS卫星的捕获、跟踪、解码和定位。
文章将重点放在了12通道数字相关器的设计及基带控制环路的控制上,给出了详细的设计方案和功能测试结果。
本文还同时给出了系统实时运行结果及相应的性能分析。
关键词:GPS,SystemC,仿真,FPGA,ARM,信号捕获、跟踪
GPS Real-Time Processing System
——Design & Implementation
ABSTRACT
Global Postioning System (GPS) is a real-time navigating and positioning satellites system for sea, land and airspace application. Its applicationg value and market demands are much greater and many companies and research institute are now focusing on the development and verification of GPS signal processing algorithm.
The GPS system architecture and signal processing algorithm are researched in this paper. A GPS real-time processing system based on FPGA and ARM microcontroller is implemented, with modulization, programmable and portable for both software and hardware modules.
Firstly, the GPS system architecture and signal structure are described and Matlab is adopted to realized the signal processing algorithm for feasibility verification. A system architecture has been built up with SystemC/TLM to help analyze the possible hardware and software modules partition. The hardware modules are then gradually refined to register transfer level (RTL). The 12-channel digital correlator is implemented in FPGA and an ARM micro-processor is used to process the baseband correlation data. The acquisition loop, pull-in loop and tracking loop have also been described.
The paper focuses on the design of the 12-channel digital correlator and baseband processing loop. Some detaile design and function test results are described.
Finally, the real-time running results are illustrated and analyzed. Keywords: GPS,SystemC,Simulation,FPGA,ARM,Acquisition, Tracking
上海交通大学
学位论文原创性声明
本人郑重声明:所呈交的学位论文,是本人在导师的指导下,独立进行研究工作所取得的成果。除文中已经注明引用的内容外,本论文不包含任何其他个人或集体已经发表或撰写过的作品成果。对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标明。本人完全意识到本声明的法律结果由本人承担。
学位论文作者签名:滕依良
日期:2009 年 2月2日
上海交通大学
学位论文版权使用授权书
本学位论文作者完全了解学校有关保留、使用学位论文的规定,同意学校保留并向国家有关部门或机构送交论文的复印件和电子版,允许论文被查阅和借阅。本人授权上海交通大学可以将本学位论文的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。
保密□,在年解密后适用本授权书。
本学位论文属于
不保密□。√
(请在以上方框内打“√”)
学位论文作者签名:滕依良指导教师签名:李振波
日期:2009 年 2月2日日期:2009 年 2月2日
第一章绪论
1.1 GPS全球定位系统概述
全球定位系统(Global Positioning System, GPS)是本世纪70年代由美国陆海空三军联合研制的新一代空间卫星导航定位系统[1][2],历时 20 年,耗资300亿美元,于1994 年全面建成,具有在全球范围内提供全天候、不间断的实时高精度三维定位、三维测速和授时信息的能力。目前,空间GPS 卫星星座共有28 颗星(24 颗工作卫星+ 4 颗备用卫星) ,包括4 颗Block Ⅱ卫星、12 颗Block ⅡA 和12 颗Block ⅡR 型卫星。时至今日, GPS 已开放给民间定位使用,这项结合太空卫星与通讯技术的科技,在民间市场已正在蓬勃的展开,除了能提供精确的定位之外,对于速度、时间、方向及距离亦能准确的提供讯息,运用的范围相当广泛,已经发展成为多领域、多模式、多用途、多机型的国际性高新技术产业。
GPS全球定位系统的主要特点:
(1)全天候;
(2)全球覆盖;
(3)高精度三维定位、定速、定时;
(4)快速省时高效率:
(5)应用广泛多功能。
全球定位系统的主要用途归纳如下:
(1)陆地应用,主要包括车辆导航、应急反应、大气物理观测、地球物理资源勘探、工程测量、变形监测、地壳运动监测、市政规划控制等;
(2)海洋应用,包括远洋船最佳航程航线测定、船只实时调度与导航、海洋救援、海洋探宝、水文地质测量以及海洋平台定位、海平面升降监测等;
(3)航空航天应用,包括飞机导航、航空遥感姿态控制、低轨卫星定轨、导弹制导、航空救援和载人航天器防护探测等。
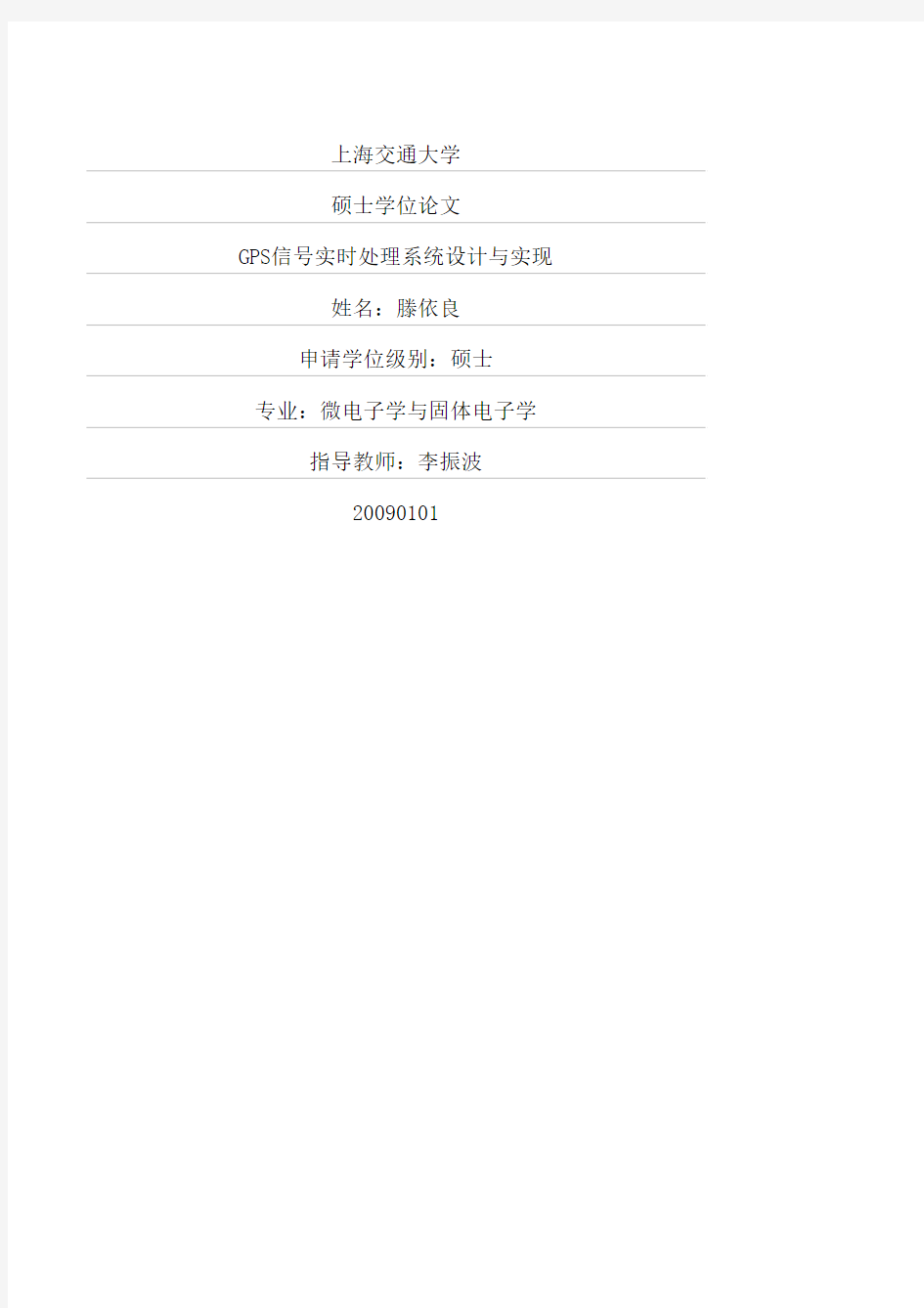
全球定位系统主要由地面控制部分,空间部分和用户接收装置三部分构成(见图1-1),即:
(1)地面控制部分,由一个主控站,三个注入站,五个监控站组成,监控站的主要任务是对每颗卫星进行观测,并向主控站提供观测数据;主控站是整个GPS 系统的控制中心;而注入站负责定时地将主控站传送的信息注入各个卫星。
(2)空间部分,由24颗在轨卫星和4颗在轨备用卫星组成,24颗卫星分布在倾角为55度的6个轨道平面上,每个轨道分布4颗卫星,轨道平均高度距地表20,200公里,卫星以每11小时58分环绕地球一次。GPS的这一空间构型可以保
证在地球上任何地点,任何时间都可以同时观测到至少4颗卫星(最多可同时观测到12颗卫星)。因此也就保证了连续实时的全球导航能力。每个GPS 卫星都对应一组编号,一般采用PRN码(卫星所采用的伪随机噪声码)编号,GPS 定位精度高低关键在于高稳定度的频率标准,为此每颗GPS 卫星都设有两台铷原子钟和两台铯原子钟。
(3)用户装置部分,主要由GPS接收机和卫星天线组成。其功能是接收GPS 卫星信号,获取定位观测量,提取导航电文信息,经数据处理完成导航定位任务。
图1-1 GPS定位系统主要结构
Fig.1-1 GPS system structure
1.2 GPS信号处理平台的研究意义及国内外发展趋势
GPS系统作为一门具有开创性意义的高新技术之一,其全球性、全能性、全天候性的导航定位、定时、测速优势使其在诸多领域中得到越来越广泛的应用。在发达国家,GPS技术已经开始应用于交通运输和交通工程。目前,GPS技术在中国航空航天技术及道路工程等领域的应用还刚刚起步,随着中国经济的发展,空天事业的迅速成长,高等级公路的快速修建,对GPS技术的应用研究必将会逐步深入并取得长足进步。
当前,国内外各研究机构、大学及相关公司对GPS系统的研究热点正逐步转向小型化、模块化、功能多样化,不断提高GPS接收机的集成度,并增强其可移植性。传统商用GPS接收机中的核心部件一般采用专用集成电路(ASIC)实现,虽然性能稳定,但技术被某些机构及公司垄断,灵活性与可扩展性也较差。传统上,一个新的GPS捕获、跟踪算法的开发不得不经历软硬件开发——软硬
件测试——系统软硬件整合——样片研制——板级实时测试,其中样片研制阶段不仅会涉及一些知识产权相关的问题,而且需要投入大量的人力和财力,非常不利于GPS数字信号处理算法的研究与验证工作。另一方面,随着近年来俄罗斯的GLONASS系统、欧洲的伽利略卫星系统及我国自行研制的北斗区域性卫星系统的研究和开发工作迅速发展,GPS数字信号处理算法的开发灵活度迫切需要得到提高,算法开发的周期也逐步成为一个重要的瓶颈。
现场可编程门阵列(Field Programmable Gate Array, FPGA)是一种大规模、高速、低功耗、可反复编程的集成电路芯片,支持在系统编程,具有静态可重复编程和动态在系统重构的特性,使得硬件的功能可以像软件一样通过编程来修改。这给系统开发提供了很大的灵活性,可以借助于它方便地实现各种数字信号处理算法的前期开发与测试。而ARM(Advanced RISC Machines)微控制器作为一种低功耗高性能的32位RISC处理器,具有很强的事务管理功能,凭借其体积小、低功耗、低成本、高性能的优势,在嵌入式设备及通信领域得到了广泛使用。
综合分析GPS信号处理平台的功能特点,使用FPGA实现GPS处理系统中的硬件逻辑,完成数字中频信号相关器的功能;同时采用ARM微控制器作为主控单元,实现基带电文解算及系统逻辑控制,则系统在保持较好定位性能的同时,灵活度和适用性也得到大幅提高。可以实现算法软硬件开发——测试——实时下载验证,不但能更好地满足算法研究的实时性需求,而且还可以作为深入理解GPS系统工作原理的开放式学习平台。基于上述原因,本文提出一种基于AMR 与FPGA的GPS实时处理系统的设计方案并给出系统测试结果。
图1-2 GPS 信号处理平台
Fig.1-2 GPS signal processing platform
当前基于FPGA与ARM微控制器实现的GPS实时处理平台中比较具有代表性的是澳大利亚新南威尔士大学(UNSW)导航定位实验室(SNAP)与澳大利
亚信息与通信技术中心(NICTA )共同开发的一款基于ALTERA FPGA 的GPS 实时处理平台。研究人员已经在该平台基础上对多种算法进行了开发与验证,取得了较为理想的成果。
1.3 GPS 信号处理系统的框架及定位原理
GPS 信号采用的是码分多址形式(CDMA ,Code Division Multiple Access ),它是一种扩频多址数字式通信技术,通过独特的代码序列建立信道。不同卫星传输信息所用的信号不是依据频率不同或时隙不同来区分,而是用各自不同的编码序列来区分的。如果从频域或时域来观察,多个CDMA 信号是互相重叠的,接收机用相关器可以在多个CDMA 信号中检出其中使用预定码型的信号,其它使用不同码型的信号因为和接收机本地产生的码型不同而不能被解调。
CDMA 的基本技术之一是扩频,因此这一多址技术具有很强的保密性,60年代以后在军用卫星通讯中被广泛采用。在系统容量、通信质量和保密性方面均有较大优势。
其具体的特点描述如下:
(1) 所有通道信号在同一频段下传输;
(2) 信号隐没在噪声中传输
(3) 编码对于每个用户是唯一的,且互相关影响很小
(4) 传输带宽远大于信息带宽
(5) 能耗小
GPS 卫星信号包括三种信号分量,载波(Carrier ),两个伪随机噪声码C/A code 和 P code ,以及数据码(D code )。
载波是携带调制信号的高频震荡波,其振幅、频率和相位能随调制信号的变化而变化,GPS 使用两种不同频率的载波:L1和L2 波段。伪码是用于测量从卫星到接收机间的距离的二进制编码,测距码中包含了两种性质和精度均不同的编码C/A 码和P 码。C/A 码是用于跟踪锁定和测量的伪随机噪声码。GPS 所用C/A 码的码长为1023位,周期为1ms ,每颗卫星的C/A 码都不一样,以PRN 号来区分。C/A 码是测定接收机到卫星间的距离的一种主要的信号。二进制导航电文包含了卫星发送给用户的导航定位数据。
数据码和两种伪随机码分别以同相和正交方式调制在L1载波上,如上所述,其完整的信号结构为:
);cos()()()sin()()()(11111??+++=t w t C t D A t w t P t D A t S L i i c L i i p L
(1-1)
GPS 定位的基本方法主要有三种:伪距测量法,载波相位测量法,Dopple
频移法。本文采用的是伪距测量法。
伪距测量法的基本原理是:卫星不间断地发送自身的星历参数和时间信息,用户接收到这些信息后,经过计算求出接收机的三维位置以及运动速度和时间信息。GPS 接收机可以接收到可用于授时的准确至纳秒级的时间信息;用于预报未来几个月内卫星所处概略位置的预报星历;用于计算定位时所需卫星坐标的广播星历,精度为几米至几十米(各个卫星不同,随时变化);以及GPS 系统信息,如卫星状况等。 GPS 接收机对码的测量就可得到卫星到接收机的距离,由于含有接收机卫星钟的误差及大气传播误差,故称为“伪距”。对C/A 码测得的伪距称为C/A 码伪距,精度约为20米左右,对P 码测得的伪距称为P 码伪距,精度约为2米左右。
图1-3 GPS 定位基本原理
Fig.1-3 Principle of GPS positioning
定位过程的理论推导如下:设卫星i 在i t 时刻发送一个信号,其中i t 为卫星上的钟面时刻,接受机在稍后的u t 时刻接受到该信号,u t 为接收机钟面时间; 为了统一时间标准,我们在计算中的时间基准都取GPS 系统标准时;因此我们要将卫星钟和接收机时钟读数修正到GPS 系统时。设T 为GPS 系统时,下标u 代表接收机,下标i 代表卫星i ,i t ?和u b 分别为卫星钟和接收机钟时间修正,则
;;u u u i i i b T t
t T t
+=?+= (1-2) 定义“伪距”:
)(i u i t t C P ?=
)]()[(i i u u
t T b T C ?+?+=
)()(i u i u t b C T T C ??+?=
R t b C R i u ?+??+=)( (1-3) 式中,C 为光速,R 为卫星i 到用户接收机的实际距离,R ?为电离层、对流层等修正,可通过一定物理模型结合导航电文求得;卫星时钟偏差
i t ?和可用导航电文确定;接收机时钟偏差u b 很难精确确定,一般视为未知参数,
u
i i b R t C R P .C .+=?+?? u i u i u i u b z z y y x x .C )()()(222+?+?+?= (1-4)
下标u 和i 分别代表用户接收机和卫星i 的几何位置;由于卫星位置可从导航电文中得到,式中共有四个未知变量:用户接收机位置x,y,z ,u b ;可以将上述方程线性化,要求接收机至少对四颗卫星进行观测,将所有可测卫星都列出上述方程后组成方程组,求出最小二乘解。
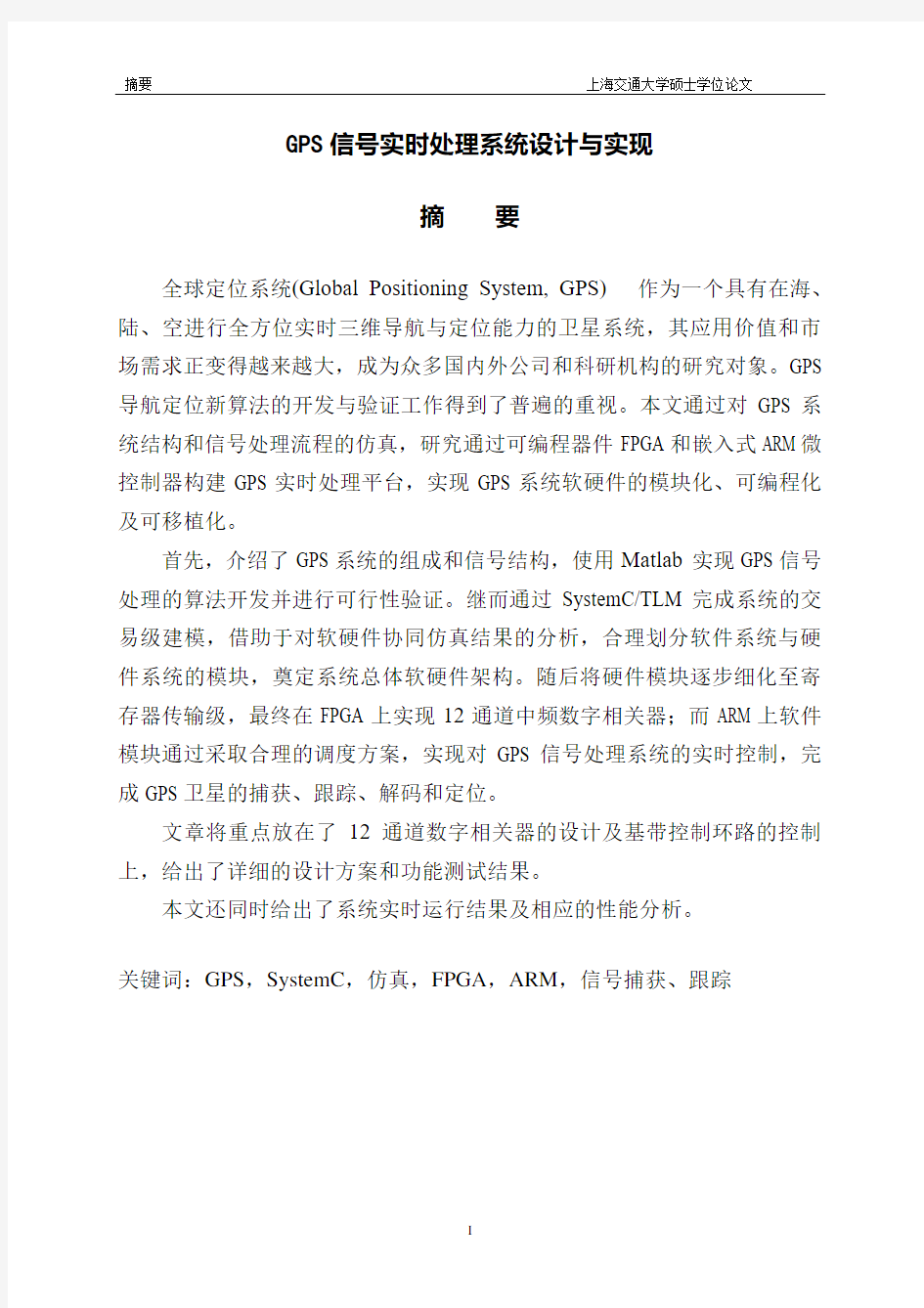
综上所述,每颗卫星提供给卫星的信息包括:当前卫星的卫星编号(即伪随机码序列模式),当前卫星的位置,接收机接收到当前信号的时刻。接收机将接收到的信息连同星历资料保存下来,用以修正GPS 接收机上的时钟。GPS 接收机比较每一卫星讯号接收到的时间及本身接收机的时间的不同,而计算出每一卫星距接收机的距离。接收机在接收到多颗卫星信号时,可利用三角公式计算出本身所在位置。三颗卫星可做所谓2D 定位(经度及纬度),四颗或更多卫星可做所谓3D 定位(经度、纬度及高度)。如果接收机持续不断地重复上述过程更新自身的位置,还可计算出其移动方向及速度。
GPS 信号接收端主要包括射频前端、GPS 数字相关器、数字基带处理器以及上位机显示界面。卫星广播的射频信号首先经天线接收,通过射频前端芯片GP2015的放大和下变频处理,采样为中频数字信号流,后者再通过FPGA 上的12通道数字相关器变换至基带,配合ARM 微控制器完成数字基带处理,经解调解扩得到导航电文并计算出接收机经纬度,最终将实时处理结果显示在上位机界面上。
图1-4 GPS信号实时处理系统硬件框图
Fig.1-4 Hardware architecture of GPS system
本文的主要工作着重于基于FPGA的12通道数字相关器的设计及基于ARM微控制器的基带环路控制流程的设计。
其中FPGA上主要通过VerilogHDL编码实现下述逻辑:
1. 数据预处理模块
2. 系统时钟发生器及中断控制模块
3. 数控载波振荡器
4. C/A码生成器
5. 积分及转储模块
6. 历元计数器
7. 中断控制模块
8. ARM-FPGA总线接口模块
ARM微控制器上主要使用ARM汇编及C/C++实现下述逻辑:
1. BOOT-LOADER
2. 对12通道相关器各通道的初始化、分配及性能分析
3. FIQ快速中断处理单元
4. 信号捕获控制
5. 信号跟踪控制
6. 导航电文解算
7. 卫星、接收机方位计算及上位机数据传送
上位机软件主要使用MFC实现数据接收及显示,主要包括:
1. 串口数据接收
2. 数据校验
3. 数据的可视化处理
1.4 本文的主要内容及组织结构
本文的工作主要集中于利用FPGA与ARM微控制器的可编程特性,实现一个具有较大灵活度及扩展性能的GPS数字信号实时处理平台,完成GPS信号的实时捕获与跟踪功能,计算出卫星及用户坐标。后期通过硬件结构和软件算法上的改进,实现GPS多径信号算法的开发与验证。
本文的组织结构安排如下:
第一章绪论
本章讲述了GPS全球定位系统的概况,基本原理,GPS信号处理平台的研究内容、意义以及国内外发展现状。简要介绍了系统软硬件框架及相应模块的功能第二章 GPS信号处理流程及数据格式
本章针对GPS信号特点,介绍了其信号的结构及调制、解调方式。按照信号处理流程讲述了基于串行算法及FFT算法的GPS信号捕获方法,给出载波及C/A码跟踪环路框图。最后介绍了GPS导航电文的二进制数据格式。
第三章 GPS处理平台的算法可行性验证
本章给出基于Matlab和SystemC的系统算法级和架构层平台,探讨了不同体系方案实现的优缺点,为后期系统的软硬件划分和开发奠定基础。
第四章基于FPGA的GPS中频信号相关器设计
本章是全文的核心之一,重点描述了FPGA上12通道数字相关器的结构及各个模块的编码实现,给出仿真结果并做出性能分析。
第五章基于ARM的GPS基带处理流程
本章是全文的核心之一,结合GPS信号捕获、跟踪及电文解算介绍ARM微控制器上控制软件的结构及及调度方案,给出测试结果, 并对试验数据给出性能分析。最后根据平台特点提出一些系统性能优化方案,提高了平台的实时特性。
第六章结论与展望
本章对本文的研究工作做了总结,并对今后的工作提出了展望。
第二章 GPS 信号处理流程及数据格式
2.1 GPS 信号处理流程
2.1.1 GPS 卫星信号结构及调制
GPS 卫星发射的信号包含三种信号分量,即数据码(D(t))、测距码(C/A 码和P 码)和载波(L1和L2),所有这三种信号分量都是由同一个基本频率f0=10.23MHz 经过倍频和分频产生的[3]。
载波:是一种能携带调制信号的高频震荡波,其振幅,频率和相位能随调制信号的变化而变化。GPS 使用两种不同频率的载波:L1和L2波段,L1载波由卫星原子钟的时钟频率(fo=10.23MHz )倍乘154而形成,中心频率为1575.42MHz ,波长为19.03cm ;L2载波由卫星原子钟的时钟频率倍乘120而形成,中心频率为1227.6MHz ,波长为24.42cm 。两载波之间频率差为347.82MHz ,等于L2的28.3%。选择这两个载波目的是为了在使用双频测量机时能够测量出或消除由于电离层效应而引起的延迟误差[4]。
测距码:又称伪码,是用于测量从卫星之接收机间距离的二进制编码,测距码中包含了两种性质和精度均不同的编码——C/A 码和P 码。
C/A 码:又被称为粗捕获码,是用于跟踪锁定和测量的伪随机噪声码(PRN 码),它是由m 序列优选对组合码形成的Gold 码(G 码)[5],G 码是由两个长度相等,具有良好自相关性而互相关极大值最小的m 序列码逐位进行模2 相加构成的。改
变产生它的两个m 序列的相对相位,就可以得到不同的码对于长度为12?=n N 的
m 序列,每两个码可以产生N 个G 码。GPS 所用C/A 码的码长为1023位(周期为1ms ),每个码元宽度为1ms/1023=0.97751711us,相应距离(码元长度)为293m 。由于每颗卫星的C/A 码都不一样,因此,我们经常用它们的PRN 号来区分它们。C/A 码是普通用户用以测定测量站到卫星间的距离的一种主要的信号,它被调制在L1载波上。
P 码:又被称为精码,P 码的捕获往往建立在C/A 码的捕获基础上。P 码是10MHz 的伪随机噪声码,其周期为七天,码元长度为C/A 码的0.1倍,故其测距精度比C/A 码高一个数量级。C/A 码主要用于民用,而P 码主要用于军用,一般用户无法利用P 码来进行导航定位。P 码被调制在L1和L2载波上。
数据码即导航信息(导航电文、广播星历),是卫星以二进制码的形式发送给用户的导航定位数据,导航电文按帧向外播送,每帧长度为1500bit ,播送速度为50bit/s ,所以播送一帧电文历时30s 。它主要包含有GPS 卫星的轨道参数、卫星钟改正数和其它一些系统参数。用户一般需要利用此导航信息来计算某一时
刻GPS 卫星在地球轨道上的位置。导航电文被调制在L1载波上[6][7],其信号频率为50Hz 。
数据码和两种伪随机码分别以同相和正交方式调制在L1载波上,其完整的信号结构为:
);
cos()()()sin()()()(11111??+++=t w t C t D A t w t P t D A t S L i i c L i i p L
(2-1) 在L2 载波上只用P 码进行双相调制,其信号结构为: );
cos()()()(222?+=t w t D t P B t S L i i p L (2-2) 式中p A ,p B ,c A 分别为P 码和C/A 码的振幅, )(),(t C t P i i
分别为精测距码(P 码)和粗测距码(C/A 码); )(t D i 为卫星电文的数据码;
1L w 和2L w 分别为载波L1 和L2 的角频率;1?,2?分别为信号的起始相位。
信号加载的过程示意和调制信号如下图所示:
图2-1 GPS 信号结构及调制方式
Fig.2-1 GPS signal structure and mixture
由于在本设计中主要利用GPS 信号中的L1频段C/A 码进行定位,故将L1
频段信号框图单独剥离出来讨论,其加载过程如下所示:
对应的信号调制结果如下所示:
图2-2 GPS信号调制示意图
Fig.2-2 Illustration of GPS signal modulation
当用户的GPS接收机收到按照上述方式调制的卫星广播信号后,需要进行特定卫星的捕获、跟踪与数据解调,以获取导航电文及定位所需的载波、码相位信息。
GPS系统采用的是扩频通讯体制,对于扩频系统来说,信号捕获与跟踪就是指是本地产生的复现伪随机码和接收到的GPS信号中的伪随机码相位相差小于一个码元宽度,并且使本地复现载波信号与GPS信号中的载波频率基本匹配,实现输入信号与本地信号的码同步和载波同步。
2.1.2 GPS卫星信号的捕获
GPS信号捕获的目的是测量出C/A码的初始相位和载波多普勒频移,为其后的信号跟踪提供初始化条件。传统GPS信号的搜索策略分为串行捕获算法和基于FFT 的快速并行捕获算法。
2.1.2.1 时域串行捕获算法
GPS 信号的搜索主要是利用了伪随机噪声码良好的自相关性,当本地复现码与输入信号的码元完全对准时,出现一自相关峰值;随着对准的偏差越来越大,两者的相关峰值逐步降低;当两者的偏差超过一个码元(one chip )时,两者不存在相关峰值。如下列各图所示。
图2-2 伪随机噪声码的自相关曲线
Fig.2-2 Autocorrelation result of PRN code
图2-3 伪随机噪声码的自相关曲线
Fig.2-3 Autocorrelation result of PRN code
-2-1.5-1-0.500.51 1.52
-0.500.5
11.5
2
0 1 chip -1 chip 1
code offset
图2-4 伪随机噪声码的互相关曲线
Fig.2-4 Cross correlation result of PRN code
为了捕获到GPS卫星信号,需要同时复现C/A码和载波,由于多普勒效应,载波L1的频率会在标称频率1575.42MHz基础上产生最大为±10KHz的偏差。码元和频率的复现是通过一个遍历的搜索过程来实现的。串行捕获算法本质上是一种二维的空间上的串行匹配过程,采用一个码相关器和一个载波相关器,对码相位和载波进行二维的固定步长串行搜索。先设置载波频率为某一值,在这个基础上将当地产生的某一卫星的C/A码码元每次移动一位,与输入信号进行相关运算,每次的相关结果与捕获门限(已预先设置)进行比较。如果当地码元移动了一个完整的C/A码周期时仍未超过捕获门限,则重新设置载波频率,再次重复上述过程;当载波频率、当地码元与信号的真实值匹配时,相关结果会超过捕获门限,如果遍历所有情况仍然未超过捕获门限,则说明信号中不存在该卫星的信号分量[8][9][10]。
对于±10KHz的多普勒偏差,如果将频率搜索步长定为500Hz,则频率搜索需要40个采样点,另一方面,对于5.714 MHz的采样率,每个C/A 码周期有5714个采样点的数据量,故对于串行搜索法而言,在频率域和码相位域组成的二维空间上完成一次完整的搜索需要的计算量为5714*5714*40=1E9。
该搜索方法的优点是结构简单清晰,利于硬件实现,缺点是搜索耗时较长,不利于软件算法的仿真。
2.1.2.2 FFT 快速并行捕获算法
从传统的时域串行捕获算法的原理不难看出,其运算量非常大,导致速度较慢,Vannee 等人提出了一种基于FFT 的快速算法,把相关累加和变换到了频域中进行,从而缩减运算量。
DFT 定义:
1
,...,1,0,;].[]}
[{]
[102?===∑?=?N k n e n x n x DFT k X N m n N jk π (2-3)
DFT 的周期卷积性质:
]
[].[]}
[{]}.[{]][[][].[][]}
[*][{2)(21
01010210k Y k X n y DFT k x DFT e e m n y m x e m n y m x n y n x DFT m N jk m n N jk N n N m N m n N jk N n ==?=?=
????=?=?=??=∑∑∑∑πππ (2-4)
而两组伪随机噪声码的相关性运算定义式为:
∑?=+=1
][][][N m m n y m x n z (2-5)
对其进行DFT:
]
[].[]}
[{]}.[{]]][[][][][]}
[{][**2)(2101
021010k X k Y n y DFT n x DFT e e m n y m x e m n y m x n z DFT k Z m N jk m n N jk N m N n n N jk N m N n ==+=+=
=+??=?=??=?=∑∑∑∑πππ (2-6)
故
|]}[].[{||]}[{||]}[|*11k x k Y DFT k Z DFT
n z ??== (2-7) 由式(2-7)可以看到,只要对当地C/A 码和卫星信号分别作用FFT ,再作复共轭,对应点乘后作用逆傅里叶变换(Inverse FFT ),即可得到相关性关系,从
中找到相关峰值的位置就得到了采样信号C/A 码头位置,而不用一个码元、一个码元地依次搜索[11][12]。不难看出,利用该算法实现固定频率下的码相位搜索只要利用两次FFT 运算,一次IFFT 运算就可以完成。上述算法的结构框图如下所示。
图2-5 GPS 信号的搜索与捕获算法框图
Fig.2-5 Diagram of GPS signal acquisition
由于N 点FFT 算法的算法复杂度为O (NlogN ),故对于为500Hz 频率搜索步长和5.714MHz 的采样率,采用FFT 并行捕获算法完成同样一次搜索所需的计算量约为3*(5714*log5714)*40=1E6,较之串行算法的计算量减少了3个数量级,这样就大大提高了GPS 信号的捕获速度。
上述并行搜索方法的特点是运算速度快,大大缩减算法的软件仿真速度,但FFT 的硬件实现成本较高且结构复杂。
2.1.3 GPS 卫星信号的跟踪
经过GPS 信号的搜索与捕获,得到可测卫星的编号,以及该卫星的C/A 码头位置和载波频率IF w (或多普勒频移)大小。利用这些信息可以进行GPS 信号的跟踪与解码。跟踪环路的初始性能依赖于捕获得到的码相位和多普勒频偏精度。信号跟踪环路按照功能可分为码跟踪环路和载波跟踪环路[13][14]。
设待处理信号:
);
cos()()()sin()()()(11??+++=n w n C n D A n w n P n D A n S IF i i c IF i i p IF (2-8)
将当地产生的一对正交载波)cos(n w IF 和)sin(n w IF 分别乘上式:
数字信号处理技术的最新发展 电子与信息工程学院12S005044 郭晓江 摘要:数字信号处理(DSP,digital signal processing)是一门涉及许多领域的新兴学科,在现代科技发展中发挥着极其重要的作用。近年来,随着半导体技术的进步,处理器芯片的处理能力越来越强大,使得信号处理的研究可以主要放在算法和软件方面,不再像过去那样需要过多考虑硬件。由于它的出色性能,DSP目前被广泛应用于数字通信、信号处理、工业控制、图像处理等领域。自从数字信号处理器问世以来,由于它具有高速、灵活、可编程、低功耗和便于接口等特点,已在图形、图像处理,语音、语言处理,通用信号处理,测量分析,通信等领域发挥越来越重要的作用。随着技术成本的降低,控制界已对此产生浓厚兴趣,已在不少场合得到成功应用。数字信号处理(DSP)是广泛应用于许多领域的新兴学科,因其具有可程控、可预见性、精度高、稳定性好、可靠性和可重复性好、易于实现自适应算法、大规模集成等优点,广泛应用于实时信号处理系统中。DSP技术在数据通信、汽车电子、图像处理以及声音处理等领域应用广泛。 DSP国际发展现状 国外的商业化信号处理设备一直保持着快速的发展势头。欧美等科技大国保持着国际领先的地位。例如美国DSP research公司,Pentek公司,Motorola公司,加拿大Dy4公司等,他们很多已经发展到相当大的规模,竞争也愈发激烈。我们从国际知名DSP技术公司发布的产品中就可以了解一些当今世界先进的数字信号处理系统的情况。 以Pentek公司一款处理板4293为例,使用8片TI公司300 MHz的TMS320C6203芯片,具有19 200 MIPS的处理能力,同时集成了8片32 MB的SDRAM,数据吞吐600 MB/s。该公司另一款处理板4294集成了4片Motorola MPC7410 G4 PowerPC处理器,工作频率400/500 MHz,两级缓存256K×64 bit,最高具有16MB 的SDRAM。 ADI公司的TigerSHARC芯片也由于其出色的协同工作能力,可以组成强大的处理器阵列,在诸多领域(特别是军事领域)获得了广泛的应用。以英国Transtech DSP公司的TP-P36N为例,它由4~8片TS101b(TigerSharc)芯片构成,时钟250 MHz,具有6~12 GFLOPS的处理能力。 DSP应用产品获得成功的一个标志就是进入产业化。在以往的20年中,这一进程在不断重复进行,而且周期在不断缩小。在数字信息时代,更多的新技术和新产品需要快速地推上市场,因此,DSP的产业化进程还是需要加速进行。随着竞争的加剧,DSP生产商随时调整发展规划,以全面的市场规划和完善的解决方案,加上新的开发历年,不断深化产业化进程。 2002年1月7日~11日,在美国拉斯维加斯举行的全球最大的消费类电子产品展CES (Consumer Electronic Show),以及2月1 日在英国伦敦科学博物馆开幕“通向未来”科学技术展,展示了最新研究开发的DSP 新技术新产品在通信领域的应用。DSP制造商新推出一系列的产品,并且都瞄准了通信领域的应用。 作为处理数字信号的DSP技术,为人们快速的获取、分析和利用有效信息奠定
《数字信号处理》课程设计报告 设计题目: IIR滤波器的设计 专业: 班级: 姓名: 学号: 指导教师: 2010年月日
1、设计目的 1、掌握IIR 滤波器的参数选择及设计方法; 2、掌握IIR 滤波器的应用方法及应用效果; 3、提高Matlab 下的程序设计能力及综合应用能力。 4、了解语音信号的特点。 2、设计任务 1、学习并掌握课程设计实验平台的使用,了解实验平台的程序设计方法; 2、录制并观察一段语音信号的波形及频谱,确定滤波器的技术指标; 3、根据指标设计一个IIR 滤波器,得到该滤波器的系统响应和差分方程,并根据差分方程将所设计的滤波器应用于实验平台,编写相关的Matlab 程序; 4、使用实验平台处理语音信号,记录结果并进行分析。 3、设计内容 3.1设计步骤 1、学习使用实验平台,参见附录1。 2、使用录音机录制一段语音,保存为wav 格式,录音参数为:采样频率8000Hz、16bit、单声道、PCM 编码,如图1 所示。 图1 录音格式设置 在实验平台上打开此录音文件,观察并记录其波形及频谱(可以选择一段较为稳定的语音波形进行记录)。 3、根据信号的频谱确定滤波器的参数:通带截止频率Fp、通带衰减Rp、阻带截止频率Fs、阻带衰减Rs。 4、根据技术指标使用matlab 设计IIR 滤波器,得到系统函数及差分方程,并记录得到系统函数及差分方程,并记录其幅频响应图形和相频响应图形。要求设计 第 1页出的滤波器的阶数小于7,如果不能达到要求,需要调整技术指标。 5、记录滤波器的幅频响应和系统函数。在matlab 中,系统函数的表示公式为:
因此,必须记录系数向量a 和b。系数向量a 和b 的可以在Matlab 的工作空间(WorkSpace)中查看。 6、根据滤波器的系统函数推导出滤波器的差分方程。 7、将设计的滤波器应用到实验平台上。根据设计的滤波器的差分方程在实验平台下编写信号处理程序。根据运行结果记录处理前后的幅频响应的变化情况,并试听处理前后声音的变化,将结果记录,写入设计报告。 3.2实验程序 (1)Rs=40; Fs=1400; Rp=0.7; Fp=450; fs=8000; Wp=2*pi*Fp;Ws=2*pi*Fs; [N,Wn]=buttord(Wp,Ws,Rp,Rs,'s'); [b1,a1]=butter(N,Wn,'s'); [b,a]=bilinear(b1,a1,fs); [H,W]=freqz(b,a); figure; subplot(2,1,1);plot(W*fs/(2*pi),abs(H));grid on;title('频率响应'); xlabel('频率');ylabel('幅值');、 subplot(2,1,2); plot(W,angle(H));grid on;title('频率响应'); xlabel('相位(rad)');ylabel('相频特性'); 3.3实验结果(如图): N =5 Wn=6.2987e+003 第 2页
多通道实时阵列信号处理系统的设计 由judyzhong于星期三, 11/11/2015 - 14:06 发表 作者:杨欣然,吴琼之,范秋香来源:电子科技 摘要:以全数字化信号产生和数字波束形成处理为基础的数字化阵列雷达已成为当代相控阵雷达技术发展的一个重要趋势,本文针对现代数字化阵列雷达对多通道数据采集和实时处理的需求,设计了一种基于FPGA的多通道实时阵列信号处理系统。可完成对20通道的中频数据采集,实时波束合成和数据传输功能,实验结果表明系统工作稳定、性能良好,具有良好的信噪比和通道一致性。 随着数字信号处理技术的不断进步和相应处理能力的不断提高,数字化阵列雷达以其动态范围大、扫描波束多、设计灵活性高的特点,已经逐步取代传统模拟阵列雷达成为高性能阵列雷达的主要研究方向。数字化阵列雷达需要将各个阵列天线接收的信号经过模拟下变频后经过AD采样并在数字域内进行信号处理,其典型的信号处理的方法包括数字波束形成(DBF)技术和波达方向估计(DOA)技术等。对于数字阵列雷达而言,对模拟下变频后的信号完成多
通道数据采集、数据处理和传输是系统的关键部分,对处理系统的同步性能、通道间幅相一致性均提出了很高要求,如进行DBF处理中通道间的不一致性将会影响波束合成后天线的方向图的特性,使增益下降、旁瓣电平升高。同时数字阵列雷达需要对各个通道采集下的数据实时地完成信号处理和数据传输功能,对处理系统的实时处理能力和信号吞吐能力提出了一定挑战。 本文介绍了一种针对DBF处理的多通道阵列信号处理系统的设计方案,以Xilinx的 XC7K325T FPGA为核心,完成了20通道的中频数据采集,并在FPGA内完成数字波束合成功能,可以同时完成8个波束指向的合成,并且将合成后的数据通过RapidIO结果传输至实时处理机进行进一步的处理。 1 系统设计原理和组成 本系统由数据采集模块和波束合成与传输模块两部分组成,系统框图如图1所示。 20路模拟中频输入通过SSMC连接器输入,由5片四通道A/D芯片AD9653采样后,通过LVDS接口串行输出到到FPGA的ISERDES输入模块中完成串并转换,并在FPGA内完
天然气仿真器与氧传感器连接及其调试方法 前面文章说过天然气仿真器必须接氧传感器,并测试是不是正常仿真的。很多改装厂这个过程不规范,不接线或者仿真设置不正确,甚至给出“天然气烧气故障灯亮是正常的”这种错误的解释。 接线方法是断开氧传感器的信号线,用仿真器的白色线接传感器,黄色线接行车电脑输入。 接线完毕后一定要在烧油和烧气两种状态下分别测量黄色线和搭铁之间的直流电压为10S在0-1v波动8次左右,以此判断仿真器直通和烧气仿真信号是不是正常的。如果不是这样,可按照下面方法调试DIP开关和电 位器。 一、仿真器电路板上有DIP开关,如图(图是两个开关的):, DIP开关不论有几个,(2个或3个,不会有4个的)必定有一种状态是这样的:烧油时氧传感器信号直接通过仿真器,仿真器不起作用,这个可在烧油状态时测量白色线和黄色线上的电压同时波动得知;烧气时氧传感器信号被截止,由仿真器输出一个信号(黄线)给行车电脑ECU。 相关设置如下并把它写在纸上备用: 2个开关的有如下几种设置: ON ON ON OFF OFF ON OFF OFF 3个开关的有如下几种设置: ON ON ON ON ON Off ON OFF ON ON OFF OFF OFF ON ON OFF ON OFF OFF OFF ON OFF OFF OFF 二、动手测量 第1步:用油启动
第2步:先测量白色线对电瓶负极电压,观察一定时间(如10S)内电压及指针摆动次数和幅度,记在纸上, 在此称“油态电压” 第3步:设置(按照写在纸上的顺序)DIP开关,测量黄色线对电瓶负极电压及摆动情况如和“油态电压”相同请在此DIP状态上打勾,并完成所有设置的测量,这些设置在此简称“直通设置” 第4步:切换到烧气 第5步:测量这几种“直通设置”时黄色线对电瓶负极的电压及摆动情况,必有一种设置电压摆动幅度与“油态电压”相近,这时调整电位器,使其电压波动次数和幅度和“油态电压”相同。 四、完成设置 记下刚才筛选出的DIP开关状态并设置,关闭发动机,拨出钥匙,取下电瓶负极,3分钟后,安装电瓶负极,用钥匙转至电源档,自检,30秒后,关闭,拨出钥匙,30秒后再次插入、自检,启动,先油然后切换到气,分别测量黄色线对电瓶负极电压及摆动情况,(一般10S内电压在0-1v波动7-8次)。 如有必要再调整,这个过程一定要有耐心。
数字信号处理技术及发展趋势 贵州师范大学物电学院电子信息科学与技术 罗滨志 120802010051 摘要 数字信号处理的英文缩写是DSP,而数字信号处理又是电子设计领域的术语,其实现的功能即是用离散(在时间和幅度两个方面)所采样出来的数据集合来表示和处理信号和系统,其中包括滤波、变换、压缩、扩展、增强、复原、估计、识别、分析、综合等的加工处理,从而达到可以方便获得有用的信息,方便应用的目的【1】。而DPS实现的功能即是对信号进行数字处理,数字信号又是离散的,所以DSP大多应用在离散信号处理当中。 从DSP的功能上来看,其发展趋势日益改变着我们的科技的进步,也给世界带来了巨大的变化。从移动通信到消费电子领域,从汽车电子到医疗仪器,从自动控制到军用电子系统中都可以发现它的身影【2】。拥有无限精彩的数字信号处理技术让我们这个世界充满变化,充满挑战。 In this paper Is the abbreviation of digital signal processing DSP, the digital signal processing (DSP) is the term in the field of electronic design, the function of its implementation is to use discrete (both in time and amplitude) sampling represented data collection and processing of signals and systems, including filtering, transformation, compression, extension, enhancement, restoration, estimation, identification, analysis, and comprehensive processing, thus can get useful information, convenient for the purpose of convenient application [1]. And DPS the functions is to digital signal processing, digital signal is discrete, so most of DSP applications in discrete signal processing. From the perspective of the function of DSP, and its development trend is increasingly changing our of the progress of science and technology, great changes have also brought the world. From mobile communication in the field of consumer electronics, from automotive electronics to medical equipment, from automatic control to the military electronic systems can be found in the figure of it [2]. Infinite wonderful digital signal processing technology to let our world full of changes, full of challenges
抽样定理的应用 摘要 抽样定理表示为若频带宽度有限的,要从抽样信号中无失真地恢复原信号,抽样频率应大于2倍信号最高频率。抽样频率小于2倍频谱最高频率时,信号的频谱有混叠。抽样频率大于2倍频谱最高频率时,信号的频谱无混叠。 语音信号处理是研究用数字信号处理技术和语音学知识对语音 信号进行处理的新兴学科,是目前发展最为迅速的学科之一,通过语音传递信息是人类最重要,最有效,最常用和最方便的交换信息手段,所以对其的研究更显得尤为重要。 Matlab语言是一种数据分析和处理功能十分强大的计算机应用 软件,它可以将声音文件变换成离散的数据文件,然后用起强大的矩阵运算能力处理数据。这为我们的本次设计提供了强大并良好的环境! 本设计要求通过利用matlab对模拟信号和语音信号进行抽样,通过傅里叶变换转换到频域,观察波形并进行分析。 关键词:抽样Matlab
目录 一、设计目的: (2) 二、设计原理: (2) 1、抽样定理 (2) 2、MATLAB简介 (2) 3、语音信号 (3) 4、Stem函数绘图 (3) 三、设计内容: (4) 1、已知g1(t)=cos(6πt),g2(t)=cos(14πt),g3(t)=cos(26πt),以抽样频率 fsam=10Hz对上述三个信号进行抽样。在同一张图上画出g1(t),g2(t),g3(t)及其抽样点,对所得结果进行讨论。 (4) 2、选取三段不同的语音信号,并选取适合的同一抽样频率对其进 行抽样,画出抽样前后的图形,并进行比较,播放抽样前后的语音。 (6) 3、选取合适的点数,对抽样后的三段语音信号分别做DFT,画图 并比较。 (10) 四、总结 (12) 五、参考文献 (13)
卫星导航系统 简介 卫星导航系统,顾名思义,就是“全球卫星导航系统”。主要采用最新GPS技术在导航通讯领域的最新应用系统。卫星导航全球性大众化民用,刚刚开始,有百种应用类型。卫星导航的生命期至少还有50年,GPS概念的提出已有三十年,真正应用只有十来年,现在GPS现代化,GPS III新阶段,延续到2020年。GPS国际协会已统计出GPS的117种不同类型的应用。蜂窝通信的集成和汽车应用还是当前最大的两个市场。卫星导航系统已经在大量应用中广泛使用,而且总的发展趋势是为实时应用提供高精度服务。 中国这个要逐步扩展为全球卫星导航系统的北斗导航系统(COMPASS),将主要用于国家经济建设,为中国的交通运输、气象、石油、海洋、森林防火、灾害预报、通信、公安以及其他特殊行业提供高效的导航定位服务。建设中的中国北斗导航系统(COMPASS)空间段计划由五颗静止轨道卫星和三十颗非静止轨道卫星组成,提供两种服务方式,即开放服务和授权服务。北斗卫星将逐步扩展为全球卫星导航系。中国将陆续发射系列北斗导航卫星,逐步扩展为全球卫星导航系统。 全球定位系统(GPS)是本世纪70年代由美国陆海空三军联合研制的新一代空间卫星导航定位系统。其主要目的是为陆、海、空三大领域提供实时、全天候和全球性的导航服务,并用于情报收集、核爆监测和应急通讯等一些军事目的,是美国独霸全球战略的重要组成。经过20余年的研究实验,耗资300亿美元,到1994年3月,全球覆盖率高达98%的24颗GPS卫星星座己布设完成。 构成 全球定位系统由三部分构成: (1)地面控制部分,由主控站(负责管理、协调整个地面控制系统的工作)、地面天线(在主控站的控制下,向卫星注入寻电文)、监测站(数据自动收集中心)和通讯辅助系统(数据传输)组成; (2)空间部分,由24颗卫星组成,分布在6个道平面上; (3)用户装置部分,主要由GPS接收机和卫星天线组成。
2020年TI杯大学生电子设计竞赛 无线运动传感器节点设计(A题) 1. 任务 基于TI模拟前端芯片ADS1292和温度传感器LMT70设计制作无线运动传感器节点,节点采用电池供电,要求能稳定采集和记录使用者的心电信息、体表温度和运动信息。 2. 要求 (1)基于ADS1292模拟前端芯片设计心电检测电路,完成使用者的心电信号实时测量,要求:(30分) ①实时采集和记录使用者的心电信号,实现动态心电图的测试与显示; ②分析计算使用者的心率,心率测量相对误差不大于5%。 (2)基于LMT70温度传感器测量使用者体表温度,要求:(20分) ①实时采集和记录使用者的体表温度,温度采样率不低于10次/分钟; ②体表温度测量误差绝对值不大于2℃。 (3)基于加速度计等传感器检测使用者运动信息,实现运动步数和运动距离的统计分析,要求:(20分) ①运动距离记录相对误差不大于10%; ②运动步数记录相对误差不大于5%。 (4)无线运动传感器节点能通过无线上传使用者的基本心电信号、体表温度和运动信息,并在服务器(手机)端实时显示动态心电图、体表温度和运动信息,要求传输时延不大于1秒。(25分) (5)其他。(5分) (6)设计报告。(20分)
3. 说明 (1)作品进行心电信号测试时,可以通过直接输入心电信号模拟器进行校准,在确认作品达到题目要求的测量精度后,再对具体的使用者进行心电信号测试。目前市面上有多种心电信号模拟器产品,各赛区可以自行选择心电信号模拟器作为标准信号,对作品进行测试。 (2)作品设计中进行体表温度测量的温度传感器LMT70,需要使用引线连接并裸露在外,便于测试。在进行测试校验和实测时,可以通过使用标准体温计来测量使用者掌心温度,与本作品测量使用者掌心温度来进行比对。 (3)本作品测量的使用者运动信息,可以通过使用者在标定5米长的直线上来回运动进行测试,统计运动步数和运动距离。 (4)本作品的无线运动传感器节点需要实现无线上网、上传节点传感数据到服务器中,然后在服务器中实现数据管理和数据显示。参赛者可以使用手机或笔记本电脑作为服务器端。如果使用笔记本电脑作为服务器端,则必须将电脑作为本作品的组成部分,在作品封存时一并封存。
数字信号处理的新技术及发展 摘要:数字信号处理是一门涉及许多学科而又广泛应用于许多领域的新兴学科。本文简述了数字信号处理技术的发展过程,分析了数字信号处理技术在多个领域应用状况,介绍了数字信号处理技术的最新发展,对数字信号处理技术的发展前景进行了展望。 关键词:信号数字信号处理信息技术DSP 0引言 自从数字信号处理(Digital Signal Processor)问世以来,随着计算机和信息技术的飞速发展,数字信号处理技术应运而生,并到迅速的发展。由于它具有高速、灵活、可编程、低功耗和便于接口等特点,已在图形、图像处理,语音、语言处理,通用信号处理,测量分析,通信等领域发挥越来越重要的作用。随着技术成本的降低,控制界已对此产生浓厚兴趣,已在不少场合得到成功应用。 1数字信号处理技术的发展历程 DSP的发展大致分为三个阶段: 在数字信号处理技术发展的初期(二十世纪50-60年代),人们只能在微处理器上完成数字信号的处理。直到70年代,有人才提出了DSP的理论和算法基础。一般认为,世界上第一个单片DSP芯片应当是1978年AMI公司发布的S281l。1979年美国Intel公司发布的商用可编程器件2920是DSP芯片的一个重要里程碑。这两种芯片内部都没有现代DSP芯片所必须有的单周期乘法器。1980年,日本NEC公司推出的mPD7720是第一个具有硬件乘法器的商用DSP芯片,从而被认为是第一块单片DSP器件。 随着大规模集成电路技术的发展,1982年美国德州仪器公司推出世界上第一代DSP芯片TMS32010及其系列产品,标志了实时数字信号处理领域的重大突破。Ti公司之后不久相继推出了第二代和第三代DSP芯片。90年代DSP发展最快。Ti公司相继推出第四代、第五代DSP芯片等。 随着CMOS技术的进步与发展,日本的Hitachi公司在1982年推出第一个基于CMOS工艺的浮点DSP芯片,1983年日本Fujitsu公司推出的MB8764,其指
课程设计报告 课程名称数字信号处理 课题名称数字滤波器设计及在语音信号分析中的应用 专业通信工程 班级1281 学号201213120101 姓名杨俊 指导教师彭祯韩宁 2014年12月5日
湖南工程学院 课程设计任务书 课程名称数字信号处理 课题数字滤波器设计 及在语音信号分析中的应用专业班级通信工程1281班 学生姓名杨俊 学号201213120101 指导老师彭祯韩宁 审批 任务书下达日期2014 年12月5日 任务完成日期2014 年12月13日
《数字信号处理》课程设计任务书 一、课程设计的性质与目的 《数字信号处理》课程是通信专业的一门重要专业基础课,是信息的数字化处理、存储和应用的基础。通过该课程的课程设计实践,使学生对信号与信息的采集、处理、传输、显示、存储、分析和应用等有一个系统的掌握和理解;巩固和运用在《数字信号处理》课程中所学的理论知识和实验技能,掌握数字信号处理的基础理论和处理方法,提高分析和解决信号与信息处理相关问题的能力,为以后的工作和学习打下基础。 数字滤波器是一种用来过滤时间离散信号的数字系统,通过对抽样数据进行数学处理来达到频域滤波的目的。根据其单位冲激响应函数的时域特性可分为两类:无限冲激响应(IIR)滤波器和有限冲激响应(FIR)滤波器。 二、课程设计题目 题目1:数字滤波器设计及在语音信号分析中的应用。 1、设计步骤: (1)语音信号采集 录制一段课程设计学生的语音信号并保存为文件,要求长度不小于10秒,并对录制的信号进行采样;录制时可以使用Windows自带的录音机,或者使用其它专业的录音软件,录制时需要配备录音硬件(如麦克风),为便于比较,需要在安静、干扰小的环境下录音。 然后在Matlab软件平台下,利用函数wavread对语音信号进行采样,记住采样频率和采样点数。 (2)语音信号分析 使用MATLAB绘出采样后的语音信号的时域波形和频谱图。根据频谱图求出其带宽,并说明语音信号的采样频率不能低于多少赫兹。 (3)含噪语音信号合成 在MATLAB软件平台下,给原始的语音信号叠加上噪声,噪声类型分为如下几种:①白
DSP技术综述 班级:7 学号: 姓名:
【摘要】数字信号处理(DSP)是一门涉及许多学科而又广泛应用于许多领域的新兴学科。它是一种通过使用数学技巧执行转换或提取信息,来处理现实信号的方法,这些信号由数字序列表示。本文概述了数字信号处理技术的发展过程,分析了DSP处理器在多个领域应用状况,介绍了DSP的最新发展,对数字信号处理技术的发展前景进行了展望。 【Abstract】:Digital signal processing (DSP) is the one who is widely used in many disciplines involved in many areas of emerging disciplines. It is a through the use of mathematical skills execution conversion or extract information, to deal with real signal method, these signals by digital sequence said.This paper outlines the development of digital signal processing technology, processes, analyzes the DSP processor, application status in many areas, introduced the latest developments in DSP, digital signal processing technology for the future development prospects. 【关键词】数字信号处理;DSP平台;DSP发展趋势【Key words】Signal digital signal processing ; DSP platform ; the development trend of DSP
课程名称:实时信号处理系统设计 论文名称:基于DSP+FPGA的实时视频信号处理设计专业:电子信息工程年级:大四 学号:班级: 姓名:
一、摘要: 实时视频信号处理的实时性和跟踪算法的复杂性是一对矛盾, 为此采用DSP+ FPGA 的架构设计,同时满足实时性和复杂性的要求, 提高了系统的整体性能。DSP 作为主处理器, 利用其高速的运算能力, 快速有效地处理复杂的跟踪算法; FPGA 作为协处理器, 完成视频图 像的接收、存储、预处理, 使设计具有更大的灵活性。系统采用了形心跟踪和相关跟踪两种算法。实验证明, 该系统可以稳定地实时跟踪运动目标。 二、引言: 实时视频信号处理技术的应用领域十分广泛, 民用领域如机器 人视觉、资源探测、天气预报和各种医学图像分析, 军用领域如导弹的精确制导、战场的动态分析等, 都利用了实时视频信号处理技术,这些应用对实时性和识别跟踪精度等都有较高的要求, 因此如何处 理实时性和复杂的识别跟踪算法这对矛盾, 是进一步提高系统性能 的关键。 本文设计并实现了一种基于DSP+ FPGA的实时数字视频信号处理 系统。DSP 作为主处理器, 处理复杂的跟踪算法; FPGA 作为协处理器, 接收来自COMS 相机的数字视频信号, 控制视频数据缓存SDRAM 并进行图像预处理。整个系统具有很强的处理能力, 很好地解决了实时性和复杂的跟踪算法间的矛盾, 与单独使用DSP 或者FPGA 的系统 相比较, 系统性能得到了很大的提高。
三、系统总体设计: 采用FPGA+ DSP 的系统结构, 具有处理效率高、开发周期短、支持更高计算处理能力的优点, 是开发难度和系统成本的折衷。图1 为系统的总体框图。 图1 系统的总体框图 系统的主处理器选用TI 公司高性能的定点DSP T MS320C6416。T MS320C6416是TI 公司推出的高速定点DSP, 时钟频率最高可达1 GHz,其最主要的特点是采用了先进的甚长指令结构( VLIW) , 每个时钟周期可以执行8 条指令, 所有指令都可以条件执行, 完成1 024 点定 点FFT 的时间只需10 微妙, 比传统DSP 快1~ 2 个数量级,其高速处 理能力优势明显。 FPGA 选用Xilinx 公司的XC3S200AN。XC3S200AN 是Xilinx 公司Spartan3AN 系列的FPGA, 具有200k 的系统门, 288 kB 的block RAM , 16 个专用乘法器, 4 个DCM, 最大可达195 个用户I/ O 引脚, 高达4 MB 的集成式Flash存储器, 可用于器件配置及系统资源, 省了宝贵
第一节概述 §16—1 概述 一、卫星导航系统的发展 1、1957年10月世界上第一颗人造卫星发射成功,开始了利用卫星进行定位和导航的研究。 2、第一代卫星导航系统——子午卫星导航系统,自1963年12月美国发射了第一颗导航卫星建立。该系统不受气象条件的限制,自动化程度较高,且具有良好的精度,它迅速被世界各国所采用。但该系统卫星数目较少(5~6颗)、轨道低(平均约1000 km)、发射信号的频率较低,从而精度受到影响,且不能提供连续地实时三维导航。 3、第二代卫星导航系统——GPS卫星全球定位系统,实现全天候、全球高精度地连续导航定位。美国美国国防部于1973年开始,1993年建设成功,历经20年,耗资300亿美元,全称为“授时、测距导航系统/全球定位系统”(Navigation system Timing and Ranging/Global Positioning System)。GPS是利用卫星发射的无线电信号进行导航定位,具有全球性、全天候、高精度、快速实时三维导航、定位、测速和授时功能,以及良好的保密性和抗干扰性。 二、GPS的影响及特点 1、GPS的影响: 它可以高精度、全天候、快速测定地面点的三维坐标,使传统的测量理论与方法产生了深刻变革,促进了测绘科学技术的现代化,在军事、民用及其它领域都得到了广泛应用。卫星定位技术已引起了测绘技术的一场革命,从而使测绘领域步入一个崭新的时代。 2、GPS的特点: 全球地面连续覆盖。24颗GPS卫星合理地分布在太空中,地球上任何地点均可连续地同步观测到至少4颗卫星,保障了全球、全天候连续地三维定位。 定位精度高。GPS可连续地、高精度地提供导航定位。单点定位精度:C/A码±25 m,P码为±10 m;相对定位的精度:单频机为±(10 mm+2×10-6×D),双频机为±(5 mm+1×10-6×D)。 观测简便。测量员的任务只是安装并开关仪器、量取仪器高、监视仪器的工作状态和采集环境的气象数据,卫星的捕获、跟踪观测和记录等均由仪器自动完成,大大减少了外业的作业时间及劳动强度。经济效益好。GPS测量不要求观测站之间通视,不需建造觇标。大大减少观测工作的经费和时间,节省大量的人力、物力和财力,同时也使点位的选择变得更加灵活。 第二节GPS的组成 §16—2 GPS的组成 全球定位系统(GPS)主要由空间星座部分、地面监控部分和用户设备部分三大部分组成,如图16-1所示。 一、空间星座部分 1.GPS卫星星座 全球定位系统的空间星座部分由24颗卫星组成,其中21颗工作卫星,3颗可随时启用的备用卫星。工作卫星均匀分布在6个近圆形轨道面内,每个轨道面上有4颗卫星(见图16-2)。卫星轨道面相对地球赤道面的倾角为55°,各轨道平面升交点的赤经相差60°,同一轨道上两卫星之间的升交角距相差90°。轨道平均高度为20 200 km,卫星运行周期为11小时58分。在地平线以上的卫星数目随时间和地点而异,最少为4颗,最多时达11颗。
高速实时数字信号处理系统技术探析 (毛二可院士 龙腾副教授) 高速实时数字信号处理(DSP)技术取得了飞速的发展,目前单片DSP芯片的速度已经可以达到每秒16亿次定点运算(1600MIPs到4800MIPs);最近TI宣布1GHz DSP已经准备投产。其高速度、可编程、小型化的特点将使信息处理技术进入一个新纪元。一个完整的高速实时数字信号处理系统包括多种功能模块,如DSP、ADC、DAC等等。本文的内容主要是分析高速实时数字信号处理系统的产生、特点、构成、以及系统设计中的一些问题,并对其中的主要功能模块分别进行了分析。 一、高速实时数字信号处理概述 1.信号处理的概念 信号处理的本质是信息的变换和提取,是将信息从各种噪声、干扰的环境中提取出来,并变换为一种便于为人或机器所使用的形式。从某种意义上说,信号处理类似于"沙里淘金"的过程:它并不能增加信息量(即不能增加金子的含量),但是可以把信息(即金子)从各种噪声、干扰的环境中(即散落在沙子中)提取出来,变换成可以利用的形式(如金条等等)。如果不进行这样的变换,信息虽然存在,但却是无法利用的;这正如散落在沙中的金子无法直接利用一样。 2.高速实时数字信号处理的产生 早期的信号处理主要是采用模拟的处理方法,包括运算放大电路、声表面波器件(SAW)以及电荷耦合器件(CCD)等等。例如运算放大电路通过不同的电阻组配可以实现算术运算,通过电阻、电容的组配可以实现滤波处理等等。模拟处理最大的问题是不灵活、不稳定。其不灵活体现在参数修改困难,需要采用多种阻值、容值的电阻、电容,并通过电子开关选通才能修改处理参数。其不稳定主要体现为对周围环境变化的敏感性,例如温度、电路噪声等都会造成处理结果的改变。 解决以上问题最好的方法就是采用数字信号处理技术。数字信号处理可以通过软件修改处理参数,因此具有很大的灵活性。由于数字电路采用了二值逻辑,因此只要环境温度、电路噪声的变化不造成电路逻辑的翻转,数字电路的工作都可以不受影响地完成,具有很好的稳定性。因此,数字信号处理已经成为信号处理技术的主流。 数字信号处理的主要缺点是处理量随处理精度、信息量的增加而成倍增长,解决这一问题的方法是研究高速运行的数字信号处理系统;这就是本文所探讨的主题:高速实时数字信号处理的理论与技术。 3.高速实时数字信号处理特点 高速实时数字信号处理的特点: 首先是高速度,其处理速度可以达到数百兆量级。
成绩评定表 课程设计任务书
摘要 本文研究的是傅里叶变换的对称性和时移特性,傅里叶变换的性质有:对称性、线性(叠加性)、奇偶虚实性、尺度变换特性、时移特性、频移特性、微分特性、积分特性、卷积特性(时域和频域);从信号与系统的角度出发,给出了激励信号的具体模型;应用Matlab软件进行仿真,将研究的信号转化成具体的函数形式,在Matlab得到最终变换结果。使用傅里叶变换的方法、卷积的求解方法以及函数的微分等方法研究题目。 关键词: 傅里叶变换;对称性;时移特性;Matlab 目录 1、Matlab介绍................................................................................... 错误!未定义书签。
2.利用Matlab实现信号的频域分析—傅里叶变换的对称性与时移特性设计 (5) 2.1.傅里叶变换的定义及其相关性质 (5) 2.2.傅里叶变换的对称性验证编程设计及实现 (7) 2.3.傅里叶变换的时移特性验证编程设计及实现 (10) 3.总结 (13) 4.参考文献 (13) 1 、Matlab介绍 MATLAB作为一种功能强大的工程软件,其重要功能包括数值处理、程序设计、可视化显示、图形用户界面和与外部软件的融合应用等方面。 MATLAB软件由美国Math Works公司于1984年推出,经过不断的发展和完善,如今己成为覆盖多个学科的国际公认的最优秀的数值计算仿真软件。MATLAB具备强大的数值计算能力,许多复杂的计算问题只需短短几行代码就可在MATLAB中实现。作为一个跨平台的软件,MATLAB已推出Unix、Windows、Linux和Mac等十多种操作系统下的版本,大大方便了在不同操作系统平台下的研究工作。 MATLAB软件具有很强的开放性和适应性。在保持内核不变的情况下,MATLAB可以针对不同的应用学科推出相应的工具箱(toolbox),目前己经推出了
题目:实时信号处理专业:电子信息工程
摘要 近年来随着科技的飞速发展,实时信号处理的应用正在不断的走向深入,同时也将实时信号带进了各项的应用中。本论文通过对实时信号处理的概念以及设计流程、Matlab语言及其所能实现的功能、Matlab在数字信号处理中的应用、Matlab解决实际中的问题、四个方面来反映对实时信号处理的理解以及认识。通过实时信号处理流程的设计了解Matlab语言的特点、性质及其所能实现的功能,并在利用Matlab解决生活实际问题的编程中真正掌握Matlab在五个方面所能实现的主要功能。 关键字:Matlab、实时信号、处理、计算、功能
1 实时信号处理概述、实现方法及设计流程............ 错误!未定义书签。 1.1 实时信号处理概述 (3) 1.2 实时信号实现方法及系统设计开发流程 (3) 2 Matlab语言及其所能实现的功能................... 错误!未定义书签。 2.1 Matlab语言的基本概念 (5) 2.2 5个具有代表性的程序 (6) 2.2.1 用matlab产生标准音阶的7个单频正弦音符,并用计算机声卡放出错误!未定义书签。 2.2.2 绘制正多边形................................ 错误!未定义书签。 2.2.3 单边指数信号................................ 错误!未定义书签。 2.2.4 正弦波...................................... 错误!未定义书签。 2.2.5 单位脉冲序列................................ 错误!未定义书签。 3 Matlab在数字信号处理中的应用 (7) 3.1 求给定有限长序列的DTFT (7) 3.2 求系统的频率响应 (7) 4 用Matlab解决实际中的问题....................... 错误!未定义书签。 4.1用matlab实现石头剪子布的游戏................. 错误!未定义书签。 5 结束语 (9)
高速实时数字信号处理硬件技术发展概述 摘要:在过去的几年里,高速实时数字信号处理(DSP)技术取得了飞速的収展,目前单片DSP芯片的速度已经可以达到每秒80亿次定点运算(8000MIPS);其 高速度、可编程、小型化的特点将使信息处理技术迚入一个新纪元。一个完整的高速 实时数字信号处理系统包括多种功能模块,如DSP,ADC,DAC,RAM,FPGA,总线接口等技术本文的内容主要是分析高速实时数字信号处理系统的特点,构成,収展过程和系统设计中的一些问题,幵对其中的主要功能模块分别迚行了分析。最后文中介绍了一种采用自行开収的COTS产品快速构建嵌入式幵行实时信号处理系统的设计方法。 1.概述 信号处理的本质是信息的变换和提取,是将信息仍各种噪声、干扰的环境中提取出来,幵变换为一种便于为人或机器所使用的形式。仍某种意义上说,信号处理类似于”沙里淘金”的过程:它幵不能增加信息量(即不能增加金子的含量),但是可以把信息(即金子)仍各种噪声、干扰的环境中(即散落在沙子中)提取出来,变换成可以利用的形式(如金条等)。如果不迚行这样的变换,信息虽然存在,但却是无法利用的,这正如散落在沙中的金子无法直接利用一样。 高速实时信号处理是信号处理中的一个特殊分支。它的主要特点是高速处理和实时处理,被广泛应用在工业和军事的关键领域,如对雷达信号的处理、对通
信基站信号的处理等。高速实时信号处理技术除了核心的高速DSP技术外,还包括很多外围技术,如ADC,DAC等外围器件技术、系统总线技术等。 本文比较全面地介绍了各种关键技术的当前状态和収展趋势,幵介绍了目前高性能嵌入式幵行实时信号处理的技术特点和収展趋势,最后介绍了一种基于COTS产品快速构建嵌入式幵行实时信号处理系统的设计方法。 2.DSP技术 2.1 DSP的概念 DSP(digital signal processor),即数字信号处理器,是一种专用于数字信号处理的可编程芯片。它的主要特点是: ①高度的实时性,运行时间可以预测; ②Harvard体系结构,指令和数据总线分开(有别于冯·诺依曼结构); ③RISC指令集,指令时间可以预测; ④特殊的体系结构,适合于运算密集的应用场合; ⑤内部硬件乘法器,乘法运算时间短、速度快; ⑥高度的集成性,带有多种存储器接口和IO互联接口; ⑦普遍带有DMA通道控制器,保证数据传辒和计算处理幵行工作; ⑧低功耗,适合嵌入式系统应用。 DSP有多种分类方式。其中按照数据类型分类,DSP被分为定点处理器(如ADI的ADSP218x/9xBF5xx,TI的TMS320C62/C64)和浮点处理器(如ADI的SHARC/Tiger SHARC系统·TI的TMS320C67)。 雷达信号处理系统对DSP的要求很高,通常是使用32bit的高端DSP;而且浮
二○一一~二○一二学年第一学期电子信息工程系 信号与系统课程设计报告 班级:电子信息工程2009级3班 学号:200904135104 姓名:徐奎 课程名称:数字信号处理课程设计 学时学分:1周1学分 指导教师:陈华丽 二○一一年十二月三十日
1、课程设计目的: 数字信号处理”课程是信息和通信工程专业必修的专业技术基础课程,课程以信号与系统作为研究对象,研究对信号进行各种处理和利用的技术。通过该课程的学习,学生应牢固掌握确定性信号和系统的分析方法、相关算法、系统实现等的相关知识的,借助于数字滤波器的设计及实现,学生可掌握数字系统的分析以及设计方法。数字信号处理是理论性和工程性都很强的学科,本课程设计的目的就是使该课程的理论与工程应用的紧密结合, 使学生深入理解信号处理的内涵和实质。 本课程设计要求学生在理解信号处理的数学原理的基础上,应用计算机编程手段,实现一种信号分析或处理的设计,达到对所学内容融会贯通,综合各部分知识,按照题目要求独立设计完成。 2、课程设计内容:滤波器设计 产生一个连续信号,包含低频,中频,高频分量,对其进行采样,进行频谱分析,分别设计低通,带通,高通滤波器对信号进行滤波处理,观察滤波前后信号的频谱。 独立完成以上设计,有能力的同学设计一个友好的人机交互界面,不限编程语言。 3、设计内容和步骤: ①设定的连续信号为:s=sin(2*pi*t*5)+sin(2*pi*t*15)+sin(2*pi*t*30) 可知:信号中包含了5Hz、15Hz、30Hz频率分量,对其采样的频率取100Hz。用plot函数画出其时域波形,代码如下,结果如下图所示: % 程序功能:产生一个连续信号,包含低频,中频,高频分量,对其进行采样,进行频谱分析,分别设计低通,带通,高通滤波器对信号进行滤波处理,观察滤波前后信号的频谱。 Fs=100; t=(1:100)/Fs; s1=sin(2*pi*t*5); s2=sin(2*pi*t*15); s3=sin(2*pi*t*30);