2017 年秋季学期研究生课程考核 (读书报告、研究报告) 考核科目:雷达系统导论 学生所在(系):电子与信息工程学院 学生所在学科:电子与同学工程 学生姓名: 学号: 学生类别: 考核结果阅卷人 第 1 页(共页)
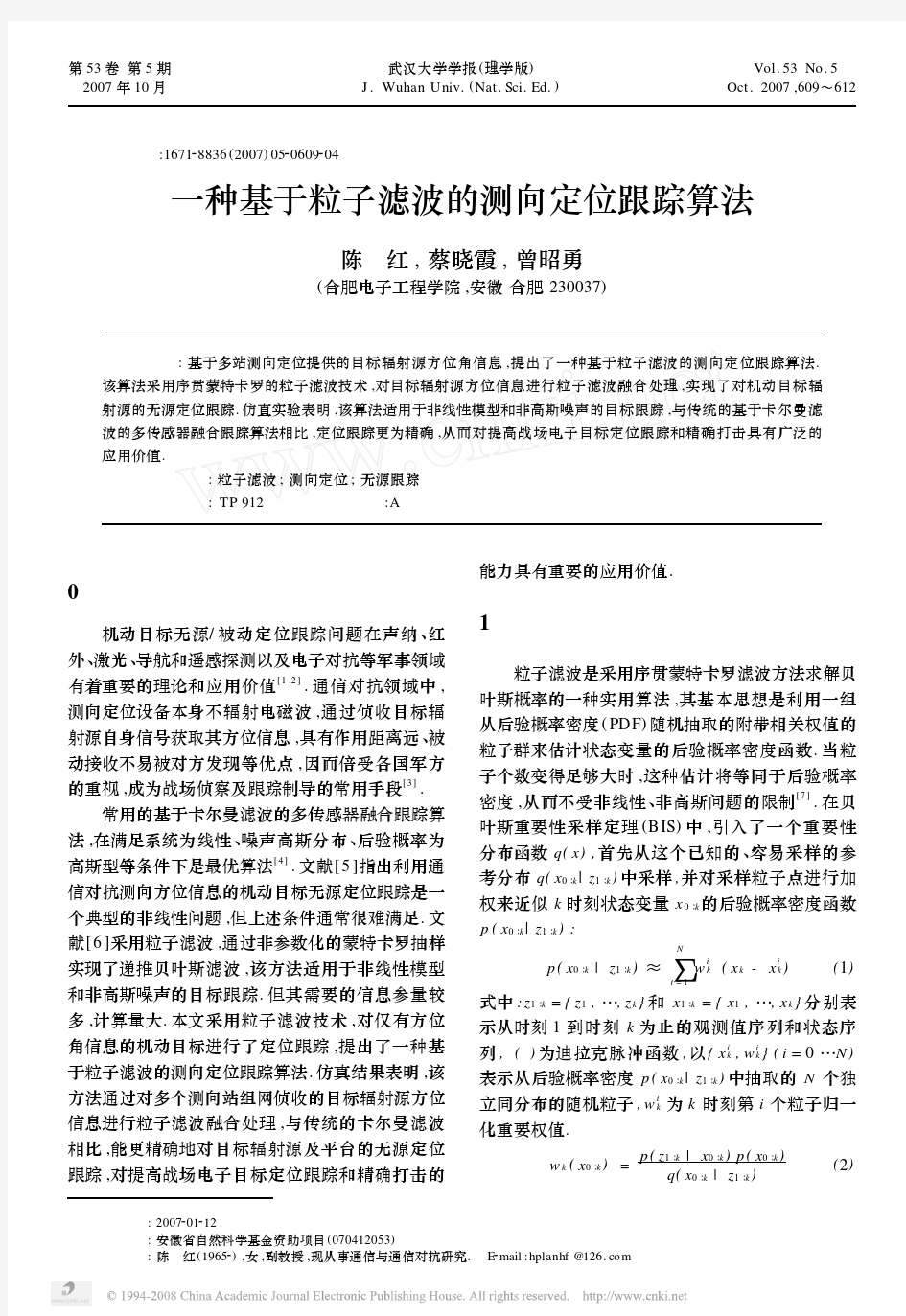
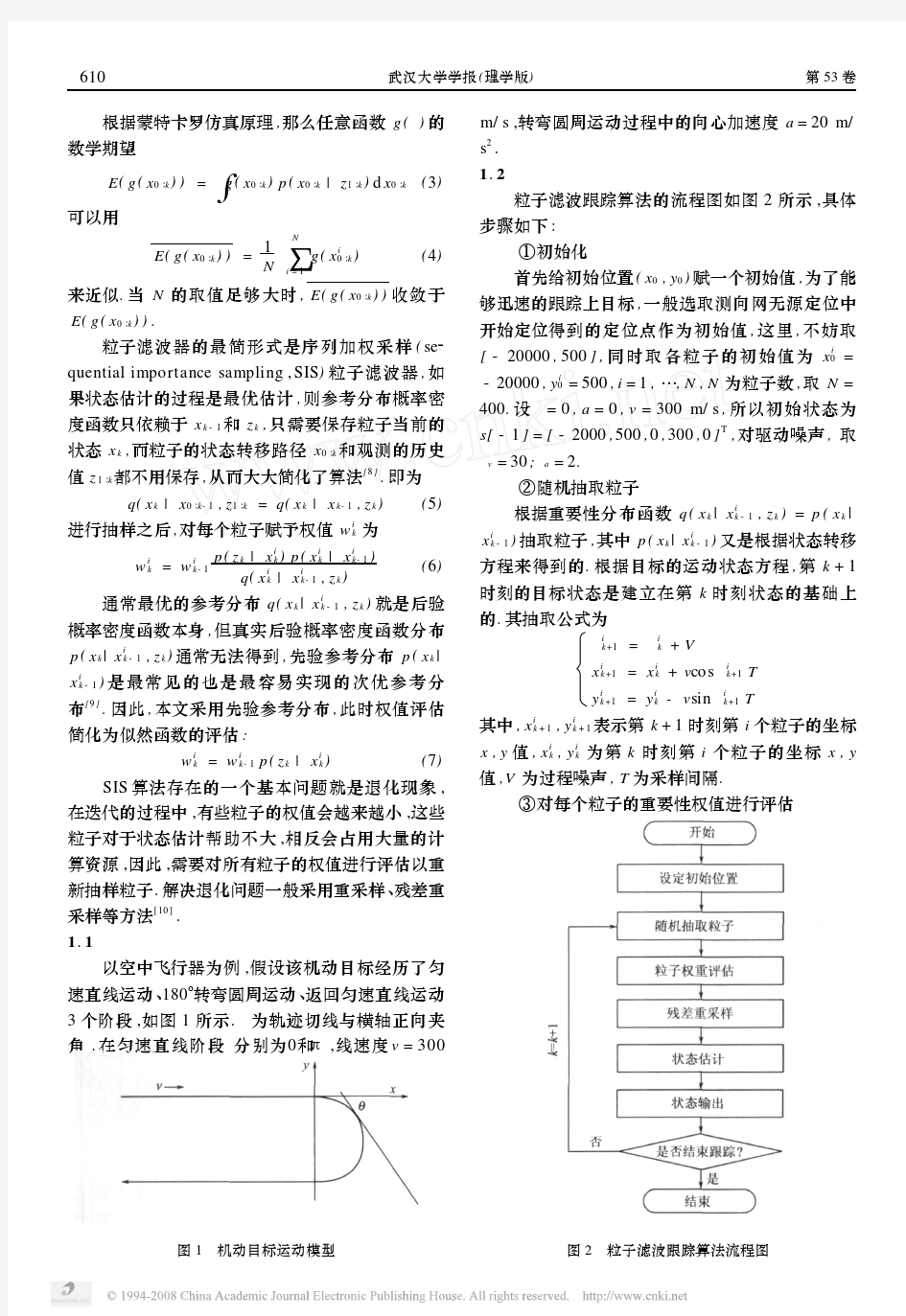
几种非线性滤波算法的介绍与性能分析 作者姓名:学号: 专业院系:电信学院电子工程系 电子邮件: 摘要—非线性滤波算法在雷达目标跟踪中有着重要的应用,对雷达的跟踪性能有着至关重要的影响。好的滤波算法有利于目标航迹的建立及保持,能够得到较精确的目标位置,为发现目标后的后续工作提供可靠的数据依据。本文重点介绍了雷达数据处理中的几种非线性滤波算法:扩展卡尔曼滤波(EKF)、不敏卡尔曼滤波(UKF)、粒子滤波(PF),并且给出了一个利用这三种算法进行数据处理的一个实例,通过这个实例对比分析了这三种算法的性能以及优劣。 关键字—非线性滤波算法;扩展卡尔曼滤波;不敏卡尔曼滤波;粒子滤波; I.概述(一级表题格式) 在雷达对目标进行跟踪前要先对目标进行检测。对于满足检测条件的目标就需要进行跟踪,在跟踪的过程中可以利用新获得的数据完成对目标的进一步检测比如去除虚假目标等,同时利用跟踪获得数据可以进一步完成对目标动态特性的检测和识别。因此对目标进行准确的跟踪是雷达性能的一个重要指标。在检测到满足条件的目标后,根据目标运动状态建立目标运动模型,然后对目标跟踪算法进行设计,这是雷达目标跟踪中的核心部分。 目前主要的跟踪算法包括线性自回归滤波,两点外推滤波、维纳滤波、- αβ滤波、加权最小二乘滤波、维纳滤波和卡尔曼滤波[1]。对于线性系统而言最优滤波的方法就是卡尔曼滤波,卡尔曼滤波是线性高斯模型下的最优状态估计算法。但是实际问题中目标的运动模型往往不是线性的,因此卡尔曼滤波具有很大的局限性。目前主要用的非线性滤波算法可以分为高斯滤波和粒子滤波[2]。不敏卡尔曼滤波和扩展卡尔曼滤波就是高斯滤波中的典型代表,也是应用相对较为广泛的。粒子滤波的应用范围比高斯滤波的适用范围要广,对于系统状态非线性,观测模型非高斯等问题都有很好的适用性。本文具体分析阐述了扩展卡尔曼滤波算法,不敏卡尔曼滤波算法,粒子滤波算法,并且通过一个实例利用仿真的方法分析了这三种算法在滤波性能上的优劣,最后对这三种算法做了一定的总结。 我本科毕业设计题目为《基于历史数据的路径生成算法研究》,由于我是跨专业保研到电信学院,该课题所研究内容不属于雷达系统研究范围,是一种城市路网最快路径生成算法。 II.几种非线性滤波算法 A.扩展卡尔曼滤波 扩展卡尔曼滤波是将非线性系统转换为近似的线性系统的一种方法,其核心思想是围绕滤波值将非线性函数展开成泰勒级数并略去二阶及以上的项,得到一个近似的线性化模型,然后应用卡尔曼滤波完成状态估计。 扩展卡尔曼滤波状态空间模型: k k k w x f+ = + ) ( x 1 状态方程 k k k v x h+ =) ( z观测方程 其中(.) f和(.) h为非线性函数 在扩展卡尔曼滤波中,状态的预测以及观测值的预测由非线性函数计算得出,线性卡尔曼滤波中的状态转移矩阵A阵和观测矩阵H阵由f和h函数的雅克比矩阵代替。 对 (.) f和(.) h Taylor展开,只保留一次项有: ) ? ( ) ?( ) ( k k k k k x x A x f x f- + ≈ ) ? ( ) ?( ) ( k k k k k x x H x h x h- + ≈ 其中: k k x x k k dx df A ?= =为f对 1- k x求导的雅克比矩阵 k k x x k k dx dh H ?= =为h对 1- k x求导的雅克比矩阵 ) ?( ? 1-k k x f x=,于是可以得出: k k k k k k k w x A x f x A x+ - + ≈ + ) ? ) ?( ( 1 k k k k k k k v x H x h x H z+ - + ≈ + ) ? ) ?( ( 1 通过以上变换,将非线性问题线性化。接下来EKF 滤波过程同线性卡尔曼滤波相同,公式如下: )) | (?( ) |1 ( X?k k X f k k= + ) ( ) ( ) | ( ) ( ) |1 (P k Q k k k P k k k+ Φ' Φ = + )1 ( )1 ( ) |1 ( )1 ( )1 (S+ + + ' + + = +k R k H k k P k H k )1 ( )1 ( ) |1 ( )1 ( K1+ + ' + = +-k S k H k k P k
大庆石油学院学报 第32卷第3期2008年6月J OU RNAL OF DAQ IN G PETROL EUM INSTITU TE Vol.32No.3J un.2008 收稿日期:2007212224;审稿人:付光杰;编辑:郑丽芹 作者简介:任伟建(1963-),女,博士生导师,教授,主要从事复杂系统的控制及故障诊断方面的研究. 基于粒子滤波和贝叶斯估计的目标跟踪 任伟建1,山茂泉1,谢 锋2,王文东3 (1.大庆石油学院电气信息工程学院,黑龙江大庆 163318; 2.大庆油田有限责任公司第二采油厂,黑龙江大庆 163414; 3.大庆钻井技术服务公司钻井工具分公司,黑龙江大庆 163461) 摘 要:针对颜色直方图的彩色物体的运动目标,在各种噪声的干扰下多呈现非线性和非高斯的特点,利用粒子滤 波的方法进行运动估计和跟踪.利用粒子滤波对非线性和非高斯的有效逼近的性质,获得粒子的后验概率分布,估计目 标状态,实现目标的有效跟踪.采用累加权值概率并且引入随机正态分布进行采样,保证粒子的多样性,有效避免粒子退 化问题.仿真结果表明该方法的有效性. 关 键 词:粒子滤波;贝叶斯估计;目标跟踪;彩色直方图 中图分类号:TP182 文献标识码:A 文章编号:100021891(2008)0320067204 0 引言 目标存在变化多样和跟踪设备对环境适应性不完善等问题,复杂环境下的运动目标跟踪是个难题[1,2].为了有效跟踪运动目标,必须对运动对象进行有效的估计,利用已有的信息,获得当前运动物体估计状态,然后利用现有观察数据对运动状态进行修正.该类问题经常采用广义卡尔曼滤波方法.广义卡尔曼滤波依赖于模型的线性化和高斯假设.在估计系统状态和方差时,由于线性逼近,可能导致滤波发散.且如果密度函数不是高斯分布,该方法估计精度不高.近年来出现一种新的最优非线性方法———粒子滤波,它源自序列蒙特卡罗方法[3].该方法不受动态系统各个随机变量的限制,能够有效地应用于非线性、非高斯的运动系统中. 文中首先对选定区域目标建立颜色直方图模型,然后在选定区域附近产生目标粒子区域,利用巴特查理亚系数测量粒子区域和选定区域2种分布之间的相似度,运用粒子滤波估计方法实现运动目标的跟踪.在跟踪过程中,粒子存在退化现象.文献[4]采取重采样方法在一定程度上解决了退化问题,但由于重采样是根据权值大小进行的,导致采样后的粒子由大量重复的粒子构成,失去了多样性.文中采取概率累加的方法保持粒子的多样性,防止粒子退化,取得较好的效果. 1 运动目标模型 在确定运动目标后,建立基于指数分布的统计模型.在区域中心,属于运动目标的概率为1,在偏离中心的距离大于阈值时,概率属于指数衰减[5]: p pos (z i )=1,‖z i ‖≤T ; exp -‖z i ‖-T max (‖z i ‖-T )N i =1 ,‖z i ‖>T ,(1)可得到目标的统计直方图分布模型: p pos (u )=C 6N i =1p pos (z i )δ(b (z i )-u ),(2) C =1 6N i =1p pos (z i ). (3)
TLD目标跟踪算法 一、算法的背景 TLD(Tracking-Learning-Detection)是英国萨里大学的一个捷克籍博士生Zdenek 出的一种新的单目标长时间(long term tracking)跟踪算法。该算法与传统跟踪算法的显著区别在于将传统的跟踪算法和传统的检测算法相结合来解决被跟踪目标在被跟踪过程中发生的形变、部分遮挡等问题。同时,通过一种改进的在线学习机制不断更新跟踪模块的“显著特征点”和检测模块的目标模型及相关参数,从而使得跟踪效果更加稳定、鲁棒、可靠。 对于长时间跟踪而言,一个关键的问题是:当目标重新出现在相机视野中时,系统应该能重新检测到它,并开始重新跟踪。但是,长时间跟踪过程中,被跟踪目标将不可避免的发生形状变化、光照条件变化、尺度变化、遮挡等情况。传统的跟踪算法,前端需要跟检测模块相互配合,当检测到被跟踪目标之后,就开始进入跟踪模块,而此后,检测模块就不会介入到跟踪过程中。但这种方法有一个致命的缺陷:即,当被跟踪目标存在形状变化或遮挡时,跟踪就很容易失败;因此,对于长时间跟踪,或者被跟踪目标存在形状变化情况下的跟踪,很多人采用检测的方法来代替跟踪。该方法虽然在某些情况下可以改进跟踪效果,但它需要一个离线的学习过程。即:在检测之前,需要挑选大量的被跟踪目标的样本来进行学习和训练。这也就意味着,训练样本要涵盖被跟踪目标可能发生的各种形变和各种尺度、姿态变化和光照变化的情况。换言之,利用检测的方法来达到长时间跟踪的目的,对于训练样本的选择至关重要,否则,跟踪的鲁棒性就难以保证。 考虑到单纯的跟踪或者单纯的检测算法都无法在长时间跟踪过程中达到理想的效果,所以,TLD方法就考虑将两者予以结合,并加入一种改进的在线学习机制,从而使得整体的目标跟踪更加稳定、有效。 简单来说,TLD算法由三部分组成:跟踪模块、检测模块、学习模块;如下图所示 其运行机制为:检测模块和跟踪模块互补干涉的并行进行处理。首先,跟踪模块假设相邻视频帧之间物体的运动是有限的,且被跟踪目标是可见的,以此来估计目标的运动。 如果目标在相机视野中消失,将造成跟踪失败。检测模块假设每一个视帧都是彼此独立的,并且根据以往检测和学习到的目标模型,对每一帧图片进行全图搜索以定位目标可能出现的区域。同其它目标检测方法一样,TLD中的检测模块也有可能出现错误,且错误无非是错误的负样例和错误的正样例这两种情况。而学习模块则根据跟踪模块的结果对检测模块的这两种错误进行评估,并根据评估结果生成训练样本对检测模块的目标模型进行更新,同时对跟踪模块的“关键特征点”进行更新,以此来避免以后出现类似的
非视距传播环境下的AOA定位跟踪算法 摘要: 基于几何结构的单次反射统计信道模型,提出了一种在非视距(NLOS)传播环境下对移动台的到达角(AOA)的定位与跟踪算法。首先利用径向基函数(RBF)神经网络对NLOS 误差进行修正,再利用最小二乘(LS)算法进行移动台位置估计,然后配合相关检测距离门对移动台进行跟踪。仿真结果表明,该跟踪算法能够有效地实现移动台的静态定位与动态跟踪,且效果良好。 ?ス丶?词: 非视距;到达角;跟踪算法;神经网络;最小二乘法 ?ブ型挤掷嗪牛? TP929.53 文献标志码:A 英文标题 ?? AOA location and tracking algorithm in ??non??line??of??sight propagation environment ?び⑽淖髡呙? MAO Yong??yi 1,ZHANG Ying2 ?び⑽牡刂?(
1. Department of Postgraduate, Xi’an University of Posts and Telecommunications, Xi’an Shaanxi 710061, China??;?? 2. College of Communication and Information Engineering, Xi’an University of Posts and Telecommunications, Xi’an Shaanxi 710061, China 英文摘要 )?? Abstract: Based on Geometrically Based Single??Bounce (GBSB) statistical channel model, a Angel of Arrival (AOA)??based location and tracking algorithm in Non??Line??Of??Sight (NLOS) environment for Mobile Station (MS) was proposed in this paper. The algorithm using Radical Basis Function (RBF) neural network was able to correct the NLOS errors, and then the positions of MS could be estimated by Least??Square (LS) algorithm. Furthermore, cooperating with correlation detection gate, the MS was tracked by the algorithm. The simulation results show that the proposed algorithm can efficiently track the MS dynamically, and has good results. 英文关键词 ??Key words: Non??Line??Of??Sight (NLOS); Angel of Arrival (AOA);
运动目标跟踪就是在一段序列图像中的每幅图像中实时地找到所感兴趣的运动目标 (包括位置、速度及加速度等运动参数)。在运动目标跟踪问题的研究上,总体来说有两种思路: a)不依赖于先验知识,直接从图像序列中检测到运动目标,并进行目标识别,最终跟踪感兴趣的运动目标; b)依赖于目标的先验知识,首先为运动目标建模,然后在图像序列中实时找到相匹配的运动目标。 一、运动目标检测 对于不依赖先验知识的目标跟踪来讲,运动检测是实现跟踪的第一步。运动检测即为从序列图像中将变化区域从背景图像中提取出来。运动目标检测的算法依照目标与摄像机之间的关系可以分为静态背景下运动检测和动态背景下运动检测。 静态背景下运动检测就是摄像机在整个监视过程中不发生移动,只有被监视目标在摄像机视场内运动,这个过程只有目标相对于摄像机的运动;动态背景下运动检测就是摄像机在整个监视过程中发生了移动 (如平动、旋转或多自由度运动),被监视目标在摄像机视场内也发生了运动,这个过程就产生了目标与摄像机之间复杂的相对运动。 1、静态背景 背景差分法 背景差分法是利用当前图像与背景图像的差分来检测运动区域的一种技术。它一般能够提供最完全的特征数据,但对于动态场景的变化,如天气、光照、背景扰动及背景物移入移出等特别敏感,运动目标的阴影也会影响检测结果的准确性及跟踪的精确性。其基本思想就是首先获得一个背景模型,然后将当前帧与背景模型相减,如果像素差值大于某一阈值,则判断此像素属于运动目标,否则属于背景图像。背景模型的建立与更新、阴影的去除等对跟踪结果的好坏至关重要。 帧间差分法 相邻帧间差分法是通过相邻两帧图像的差值计算,获得运动物体位置和形状等信息的运动目标检测方法。其对环境的适应性较强,特别是对于光照的变化适应性强,但由于运动目标上像素的纹理、灰度等信息比较相近,不能检测出完整
基于Mean Shift的目标跟踪算法研究 指导教师:
摘要:该文把Itti视觉注意力模型融入到Mean Shift跟踪方法,提出了一种基于视觉显著图的Mean Shift跟踪方法。首先利用Itti视觉注意力模型,提取多种特征,得到显著图,在此基础上建立目标模型的直方图,然后运用Mean Shift方法进行跟踪。实验证明,该方法可适用于复杂背景目标的跟踪,跟踪结果稳定。 关键词:显著图目标跟踪Mean Shift Mean Shift Tracking Based on Saliency Map Abstract:In this paper, an improved Mean Shift tracking algorithm based on saliency map is proposed. Firstly, Itti visual attention model is used to extract multiple features, then to generate a saliency map,The histogram of the target based on the saliency map, can have a better description of objectives, and then use Mean Shift algorithm to tracking. Experimental results show that improved Mean Shift algorithm is able to be applied in complex background to tracking target and tracking results are stability. 1 引言 Mean Shift方法采用核概率密度来描述目标的特征,然后利用Mean Shift搜寻目标位置。这种方法具有很高的稳定行,能够适应目标的形状、大小的连续变化,而且计算速度很快,抗干扰能力强,能够保证系统的实时性和稳定性[1]。近年来在目标跟踪领域得到了广泛应用[2-3]。但是,核函数直方图对目标特征的描述比较弱,在目标周围存在与目标颜色分布相似的物体时,跟踪算法容易跟丢目标。目前对目标特征描述的改进只限于选择单一的特征,如文献[4]通过选择跟踪区域中表示目标主要特征的Harris点建立目标模型;文献[5]将初始帧的目标模型和前一帧的模型即两者的直方图分布都考虑进来,建立混合模型;文献[6]提出了以代表图像的梯度方向信息的方向直方图为目标模型;文献[7-8]提出二阶直方图,是对颜色直方图一种改进,是以颜色直方图为基础,颜色直方图只包含了颜色分布信息,二阶直方图在包含颜色信息的前提下包含了像素的均值向量和协方差。文献[9]提出目标中心加权距离,为离目标中心近的点赋予较大的权值,离目标中心远的点赋予较小的权值。文献[4-9]都是关注于目标和目标的某一种特征。但是使用单一特征的目标模型不能适应光线及背景的变化,而且当有遮挡和相似物体靠近时,容易丢失目标;若只是考虑改进目标模型,不考虑减弱背景的干扰,得到的效果毕竟是有限的。 针对上述问题,文本结合Itti 提出的视觉注意模型[5],将自底向上的视觉注意机制引入到Mean Shift跟踪中,提出了基于视觉显著图的Mean Shift跟踪方法。此方法在显著图基础上建立目标模型,由此得到的目标模型是用多种特征来描述的,同时可以降低背景对目标的干扰。 2 基于视觉显著图的Mean Shift跟踪方法
目标定位跟踪算法及仿真程序 质心算法是最简单的定位算法,如图2-1所示,四个小圆为观测站,实线三角形是目标真实的位置,假设四个圆形观测站都探测到目标的存在,则根据质心定位算法,目标的位置(x,y )可以表示为:4 4 321x x x x x +++= , 4 4 321y y y y y +++= ,这里观测站得位置为),(i i y x ,同理,当观测站数目为N 时,这时候的质心定位算法可以表示为: ???? ? ??? ????=??????∑ ∑ ==N i i N i i y N x N y x 1 1 11 图1 质心定位 %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% % 质心定位算法Matlab 程序 %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% function main % 定位初始化 Length=100; % 场地空间,单位:米 Width=100; % 场地空间,单位:米 d=50; % 目标离观测站50米以内都能探测到,反之则不能 Node_number=6; % 观测站的个数 for i=1:Node_number % 观测站的位置初始化,这里位置是随机给定的 Node(i).x=Width*rand; Node(i).y=Length*rand; end % 目标的真实位置,这里也随机给定 Target.x=Width*rand; Target.y=Length*rand; % 观测站探测目标 X=[]; for i=1:Node_number
目标跟踪算法的分类
主要基于两种思路: a)不依赖于先验知识,直接从图像序列中检测到运动目标,并进行目标识别,最终跟踪感兴趣的运动目标; b)依赖于目标的先验知识,首先为运动目标建模,然后在图像序列中实时找到相匹配的运动目标。 一.运动目标检测 对于不依赖先验知识的目标跟踪来讲,运动检测是实现跟踪的第一步。运动检测即为从序列图像中将变化区域从背景图像中提取出来。运动目标检测的算法依照目标与摄像机之间的关系可以分为静态背景下运动检测和动态背景下运动检测 (一)静态背景 1.背景差 2.帧差 3.GMM 4.光流 背景减算法可以对背景的光照变化、噪声干扰以及周期性运动等进行建模,在各种不同情况下它都可以准确地检测出运动目标。因此对于固定
个关键技术: a)匹配法则,如最大相关、最小误差等 b)搜索方法,如三步搜索法、交叉搜索法等。 c) 块大小的确定,如分级、自适应等。 光流法 光流估计的方法都是基于以下假设:图像灰度分布的变化完全是目标或者场景的运动引起的,也就是说,目标与场景的灰度不随时间变化。这使得光流方法抗噪声能力较差,其应用范围一般局限于目标与场景的灰度保持不变这个假设条件下。另外,大多数的光流计算方法相当复杂,如果没有特别的硬件装置,其处理速度相当慢,达不到实时处理的要求。 二.目标跟踪 运动目标的跟踪,即通过目标的有效表达,在图像序列中寻找与目标模板最相似候选目标区位置的过程。简单说,就是在序列图像中为目标定位。运动目标的有效表达除了对运动目标建模外,目标跟踪中常用到的目标特性表达主要包括视觉特征 (图像边缘、轮廓、形状、纹理、区域)、统计特征 (直方图、各种矩特征)、变换系数特
4.1.跟踪算法的基本流程 在本文的智能视频监控系统中,运动目标跟踪的基本流程如图4.1所示。 主要包括以下几个部分: (1)运动目标检测部分:在视频图像中定位、检测运动目标; (2)建立目标模板部分:根据检测到的目标,提取其特征建立跟踪模板; (3)目标运动预测部分:利用预测算法预测目标可能出现的位置; (4)运动目标跟踪部分:在预测范围内,利用跟踪算法搜索匹配的运动目标; 如果在预测范围内找到与目标模板匹配的目标,则更新该模板;否则建立 一个新的模板。 运动目标检测 图4.1本文的目标跟踪算法结构框图 4.2.Mean Shift算法 Mean Shifl这_个概念最早是有Fukunaga和Hostetle于1975年提出的一种无参嚣;| 一板]l_]一 ~ 一竺竺~~模一皈I| 一 王一目|! 离一 估计算法,其主要思想是沿着概率梯度上升的方向找到分布的峰值,即寻找极 值【61】;1 995年,Yizong Cheng等人定义了一簇核函数,并且设定了权重系数,这大大扩展了该算法的适用范围并使得其逐渐被不同领域所应用;自1 998年开 始,该算法被Bradski应用于人脸跟踪,其在目标跟踪领域的优势显现出来,并 不断被应用在目标跟踪的各个领域中‘621。 在Mean shift算法中非常重的一个概念就是核函数。其定义为:若函数K: 当X—R,存在剖面函数k:【0,叫一R,即式4.1: K(x)=k(㈣x 2) (4.1) 核函数必须是一个非负非增函数,并且是分段连续的,同时满足式4.2: 【k(r)dr 。 目标跟踪算法综述 大连理工大学卢湖川一、引言 目标跟踪是计算机视觉领域的一个重 要问题,在运动分析、视频压缩、行为识 别、视频监控、智能交通和机器人导航等 很多研究方向上都有着广泛的应用。目标 跟踪的主要任务是给定目标物体在第一帧 视频图像中的位置,通过外观模型和运动 模型估计目标在接下来的视频图像中的状 态。如图1所示。目标跟踪主要可以分为5 部分,分别是运动模型、特征提取、外观 模型、目标定位和模型更新。运动模型可 以依据上一帧目标的位置来预测在当前帧 目标可能出现的区域,现在大部分算法采用的是粒子滤波或相关滤波的方法来建模目标运动。随后,提取粒子图像块特征,利用外观模型来验证运动模型预测的区域是被跟踪目标的可能性,进行目标定位。由于跟踪物体先验信息的缺乏,需要在跟踪过程中实时进行模型更新,使得跟踪器能够适应目标外观和环境的变化。尽管在线目标跟踪的研究在过去几十年里有很大进展,但是由被跟踪目标外观及周围环境变化带来的困难使得设计一个鲁棒的在线跟踪算法仍然是一个富有挑战性的课题。本文将对最近几年本领域相关算法进行综述。 二、目标跟踪研究现状 1. 基于相关滤波的目标跟踪算法 在相关滤波目标跟踪算法出现之前,大部分目标跟踪算法采用粒子滤波框架来进行目标跟踪,粒子数量往往成为限制算法速度的一个重要原因。相关滤波提出了 一种新颖的循环采样方法,并利用循环样 本构建循环矩阵。利用循环矩阵时域频域 转换的特殊性质,将运算转换到频域内进 行计算,大大加快的分类器的训练。同时, 在目标检测阶段,分类器可以同时得到所 有循环样本得分组成的响应图像,根据最 大值位置进行目标定位。相关滤波用于目 标跟踪最早是在MOSSE算法[1]中提出 的。发展至今,很多基于相关滤波的改进 工作在目标跟踪领域已经取得很多可喜的 成果。 1.1. 特征部分改进 MOSSE[1] 算法及在此基础上引入循 环矩阵快速计算的CSK[2]算法均采用简单 灰度特征,这种特征很容易受到外界环境 的干扰,导致跟踪不准确。为了提升算法 性能,CN算法[3]对特征部分进行了优 化,提出CN(Color Name)空间,该空 间通道数为11(包括黑、蓝、棕、灰、绿、 橙、粉、紫、红、白和黄),颜色空间的引 入大大提升了算法的精度。 与此类似,KCF算法[4]采用方向梯度 直方图(HOG)特征与相关滤波算法结合, 同时提出一种将多通道特征融入相关滤波 的方法。这种特征对于可以提取物体的边 缘信息,对于光照和颜色变化等比较鲁棒。 方向梯度直方图(HOG)特征对于运 动模糊、光照变化及颜色变化等鲁棒性良 好,但对于形变的鲁棒性较差;颜色特征 对于形变鲁棒性较好,但对于光照变化不 够鲁棒。STAPLE算法[5]将两种特征进行 有效地结合,使用方向直方图特征得到相 关滤波的响应图,使用颜色直方图得到的 统计得分,两者融合得到最后的响应图像 并估计目标位置,提高了跟踪算法的准确 度,但也使得计算稍微复杂了一些。 图1 目标跟踪算法流程图 扩展卡尔曼滤波和粒子滤波算法比较上海大学2013 , 2014学年秋季学期 研究生课程小论文 课程名称: 随机信号导论课程编号: 07SB17002 论文题目: 扩展卡尔曼滤波和粒子滤波算法比较 研究生姓名: 班孝坤 (33%) 学号: 13720843 研究生姓名: 倪晴燕 (34%) 学号: 13720842 研究生姓名: 许成 (33%) 学号: 13720840 论文评语: 成绩: 任课教师: 刘凯 评阅日期: 扩展卡尔曼滤波和粒子滤波算法比较 第一章绪论 在各种非线性滤波技术中, 扩展卡尔曼滤波是一种最简单的算法, 它将卡尔曼滤波局部线性化,适用于弱非线性、高斯环境下。卡尔曼滤波用一系列确定样本来逼近状态的后验概率密度, 适用于高斯环境下的任何非线性系统。粒子滤波用随机样本来近似状态的后验概率密度, 适用于任何非线性非高斯环境, 但有时选择的重要性分布函数与真实后验有较大差异, 从而导致滤波结果存在较大误差, 而粒子滤 波正好克服了这一不足, 它先通过UKF产生重要性分布, 再运用PF 算法。通过仿真实验, 对其的性能进行比较。 严格说来,所有的系统都是非线性的,其中许多还是强非线性的。因此,非线性系统估计问题广泛存在于飞行器导航、目标跟踪及工业控制等领域中,具有重要的理论意义和广阔的应用前景。 系统的非线性往往成为困扰得到最优估计的重要因素,为此,人们提出了大量次优的近似估计方法。包括EKF,基于UT变换的卡尔曼滤波(UKF),粒子滤波,等等。 第二章扩展卡尔曼滤波介绍 2.1 扩展卡尔曼滤波的理论(EKF) 设非线性状态空间模型为: xfxv,(,)(1)ttt,,11 yhxn,(,)(2)ttt 式中和分别表示在t时刻系统的状态和观测,和 xR,yR,vR,nR,tttt分别表示过程噪声和观测噪声,f和h表示非线性函数。 扩展卡尔曼滤波(Extended kalman filter,以下简称EKF)是传统非线性估计的代表,其基本思想是围绕状态估值对非线性模型进行一阶Taylor展开,然后应用线性系统Kalman滤波公式。 EKF是用泰勒展开式中的一次项来对式(1)和 ( 2 ) 中的非线性函数f和h 进行线性化处理, 即先计算f和h 的雅克比矩阵, 然后再在标准卡尔曼滤波框架下进行递归滤波。和均为零均值的高斯白噪声。 vntt 2.2 扩展卡尔曼滤波的算法 EKF的算法同KF 一样, 也可分为两步预测和更新。如图2.1所示 龙源期刊网 https://www.doczj.com/doc/296721384.html, 粒子滤波的目标跟踪算法研究与实现 作者:韩雪王元亮 来源:《现代商贸工业》2011年第15期 摘要:通过已经获得的运动目标的先验特征点,以及基于这些特征点在各种噪声的干扰 下多呈现非线性和非高斯的特点,我们可以利用粒子滤波的方法进行运动估计和跟踪。由于粒子滤波具有对非线性和非高斯的有效逼近的性质,获得粒子的后验概率分布,估计目标状态,实现目标的有效跟踪。为了有效避免粒子退化问题,采用累加权值、聚类算法并且引入高斯分布函数进行采样,保证粒子的多样性。经过程序测试,结果很有效。 关键词:粒子滤波;高斯分布;目标跟踪;先验概率分布 中图分类号:TB 文献标识码:A 文章编号:1672-3198(2011)15-0271-03 目标存在变化多样和跟踪设备对环境适应性不完善等问题,复杂环境下的运动目标跟踪是个难题。例如:由于检测结果不连续,在连续帧间,有些帧没有检测结果。为了有效跟踪运动目标,必须对运动对象进行有效的估计,利用已有的信息,获得当前运动物体估计状态,然后利用现有观察数据对运动状态进行修正。该类问题经常采用广义卡尔曼滤波方法。广义卡尔曼滤波依赖于模型的线性化和高斯假设。不过卡尔曼滤波存在许多缺点:在估计系统状态和方差时,由于线性逼近,可能导致滤波发散;如果密度函数不是高斯分布,该方法估计精度不高;在多维、多因素等复杂性的限制情况下,其结果计算量往往几何倍的增长。近年来出现一种新的最优非线性方法———粒子滤波,它源自序列蒙特卡罗方法。该方法不受动态系统各个随机变量的限制,能够有效地应用于非线性、非高斯的运动系统中。 粒子滤波的核心思想是利用一系列随即样本的加权和表示所需的后验概率密度,得到状态的估计值。当样本点数增至无穷大时,蒙特卡罗特性与后验概率密度的函数表示等价。一般都是用序贯粒子滤波算法,由于此方法会产生退化现象,随意在此基础上用重新采样方法。但这又会导致有大量重复的粒子构成,增加了计算量。而文中的方法加入了聚类算法和当前帧的特征点,进一步减少了粒子退化。 1 蒙特卡罗法基本原理 粒子滤波的理论基础是基于蒙特卡罗方法,即利用一系列随机抽取的样本,计算后验概率分布的方法。因为当这个抽样足够大的时候,这样计算的结果和实际后验分布的概率分布近 本技术公开了一种定位追踪方法,信息终端通过定位系统,获得信息终端自身的位置信息,并且信息终端按照设定周期主动的将此位置信息和安全信息发送到中心系统,而一个或者多个监视设备通过此中心系统,获得所述信息终端当前的或者历史的位置信息和安全信息,且监视设备会将这些位置信息显示在监视设备的地图图形界面上;其中,以上所述的定位系统接收定位卫星的无线电信号,同时与互联网络上定位服务器进行交互得到信息终端自身的位置信息。本技术实现了对被监测设备的监控,且有效保证定位精度,数据的实时性和对信息终端的历史记录查询。 权利要求书 1.一种定位追踪方法,其特征在于,信息终端(1)通过定位系统,获 得信息终端自身的位置信息,并且信息终端(1)按照设定周期主动的将此位 置信息和安全信息发送到中心系统(3),而一个或者多个监视设备(4)通过 此中心系统(3),获得所述信息终端(1)当前的或者历史的位置信息和安全 信息,且监视设备(4)会将这些位置信息显示在监视设备(4)的地图图形 界面上; 其中,以上所述的定位系统接收定位卫星的无线电信号,同时与互联网 络上定位服务器(14)进行交互得到信息终端(1)自身的位置信息。 2.根据权利要求1所述的定位追踪方法,其特征在于,所述的信息终端(1),通过其上的卫星定位模块(11)接收定位卫星的信号,并根据接收到 的信号得到信息终端(1)的卫星定位数据,控制模块(13)通过无线模块(12) 将卫星定位数据发送给定位服务器(14),定位服务器(14)上的辅助定位算 法使用卫星定位数据,根据当前星历帮助卫星定位输出信息终端的位置信息,同时定位系统用此位置信息校准基站定位方法输出的信息终端位置信息,将校准的结果纪录在定位服务器(14)中的位置数据库中,并将校准的结果作 为定位系统的输出;当卫星定位模块(11)捕获不到卫星时,卫星定位输出 的位置信息保持不变,定位系统根据当前基站输出的位置信息和卫星定位输出的位置信息查询定位服务器(14),将定位服务器(14)的输出位置信息作 为定位系统的输出。 3.根据权利要求2所述的定位追踪方法,其特征在于, 所述的信息终端(1)中的无线模块(12),通过基站(2)和网络与定位 服务器(14)和中心系统(3)建立链接,信息终端(1)通过其上的卫星定 位模块(11)及定位服务器(14)得到其自身的位置信息,信息终端(1)中 的控制模块(13)按照设定周期周期性的将信息终端的位置信息和信息终端 的标识信息通过无线模块(12)及基站(2)发送到中心系统(3),且在无线 链路无法建立的情况下,存储信息终端(1)的当前位置信息; 所述的中心系统(3)将被监控接口接收到的信息终端的当前位置信息及 信息终端的标识信息存入其内部的数据库模块,并从数据库模块中根据信息 clc; clear; x=[0 16 25 33 50 65 75 82 100]; y=[0 172.5 227.5 324.2 330.7 286.1 237.7 201.7 0]; plot(xx,yy); 的图为 xx = 0:.01:100; yy = spline(x,y,xx); plot(xx,yy) Matlab画平滑曲线的两种方法(拟合或插值后再用plot即可) 分类:MATLAB2012-12-02 11:15 25540人阅读评论(4) 收藏举报自然状态下,用plot画的是折线,而不是平滑曲线。 有两种方法可以画平滑曲线,第一种是拟合的方法,第二种是用spcrv,其实原理应该都一样就是插值。下面是源程序,大家可以根据需要自行选择,更改拟合的参数。 clc,clear; a = 1:1:6; %横坐标 b = [8.0 9.0 10.0 15.0 35.0 40.0]; %纵坐标 plot(a, b, 'b'); %自然状态的画图效果 hold on; %第一种,画平滑曲线的方法 c = polyfit(a, b, 2); %进行拟合,c为2次拟合后的系数 d = polyval(c, a, 1); %拟合后,每一个横坐标对应的值即为d plot(a, d, 'r'); %拟合后的曲线 plot(a, b, '*'); %将每个点用*画出来 hold on; %第二种,画平滑曲线的方法 values = spcrv([[a(1) a a(end)];[b(1) b b(end)]],3); plot(values(1,:),values(2,:), 'g'); 基于粒子滤波的目标跟踪算法浅析 高 翔 (甘肃联合大学 电子信息工程学院 甘肃 兰州 730010) 摘 要: 所做的工作是利用粒子滤波理论解决目标跟踪所面临的技术问题。首先介绍粒子滤波中的两种重要算法:贝叶斯理论和蒙特卡罗方法,接着在此基础上详细阐述基于粒子滤波的目标跟踪算法。 关键词: 目标跟踪;粒子滤波;序列重要性采样 中图分类号:TN.2 文献标识码:A 文章编号:1671-7597(2011)0510193-02 1 绪论 时就可以根据上式计算出p 的概率分布。可以表示为: 粒子滤波技术在非线性、非高斯系统表现出来的优越性,决定了它的应用范围非常广泛。另外,粒子滤波器的多模态处理能力,也是它应用广泛有原因之一。本文首先介绍了粒子滤波理论的基础,接下来在此基础上研究了基于粒子滤波的目标跟踪算法。 2 粒子滤波的计算理论方法 其中,为模拟随机试验的次数,即是p 的子样本的个数。p i ,表示试2.1 贝叶斯理论 验所得到的相应的子样本。 贝叶斯估计理论较经典的统计估计理论具有更大的优势,逐渐成为科蒙特卡罗方法是以概率模型为基础的,它解题的三个主要步骤是:学界推理的一个重要工具。贝叶斯推论提供了一种与传统方法不同的概率分布形式的估计,它利用所有的已知信息来构造系统状态变量的后验概率密度,即用系统模型预测状态的先验概率密度,再利用最新的量测值进行修正,得到后验概率密度。这样它就包括了量测值和先验知识在内的所有可以利用的信息,得到的估计误差自然就小一些。 我们将会描述一个以状态x 为参数的一般模型的框架,其中t 表示离散时t 间。对于跟踪所关心的分布是后验概率 也叫滤波分布,其中 波分布可以用两步递归迭代来计算: 其中预测阶段是一个边缘分布,而新的滤波分布则是由贝叶斯法则直 接得到的。递归过程的完成需要有状态演进 的动态模型和一个当前测量值 的状态似然模型,迭代过程用一些初始状态的分布来初始化。上述跟踪迭代只是在极少的情况下具有严格的表述形式。其中最著名的是用于线性和高斯动态系统与似然模型的卡尔曼滤波器(KF ),而对于一般的非线性和非高斯模型跟踪迭代变得束手无策,这时就需要逼近技术。而序列蒙特卡罗方法也叫粒子滤波器由于它们具有有效、简单、适应性强、易实现等优点,作为一个计算复杂模型的跟踪迭代近似方案近年来受到广泛的欢迎。 2.2 蒙特卡罗方法 蒙特卡罗方法的基本原理是:在物理、数学、建筑工程以及工业生产等领域,如果要求解的问题是某种事件出现的概率,或者是某个随机变量的数学期望时,首先按照一定的方法建立一个数学模型,使该模型的参数等于要求的问题的解,然后以此数学模型为基础通过抽样试验来计算出参数的统计特性,最后给出所求问题的近似估计值。在实际的应用中,解的精确度可以用估计值的标准误差来表示。 假如有以下的函数关系式:P 二f (x ) 其中,变量x 服从某一概率分布,是一个随机变量。f (x )是一个包含多重积分的表达式,直接用解析的方法很难求出函数 p 的概率分布。 按照蒙特卡罗方法的基本思想,要想用“试验”的方法求出函数p 的概率分布概率分布,就要在函数表达式满足的定义域内,随机的抽取每一个随机变量二,并把它带入表达式f (x )中,进而求出函数p 的值。由于变量:的值是在一定的定义域内随机抽取的,所以经过多独立的模拟试验后,可以得到相应的抽样数据Pi 。当对变量:进行模拟抽取的次数足够大 第一步:构造或者描述概率过程。在实际的应用中,有些问题不具有随机性质,比如计算多重积分问题,偏微分方程的边值求解问题等。使用传统的计算方法求解这些问题比较困难,为了能利用蒙特卡罗方法求解,就需要人为的设计一个概率过程,并且该概率过程要能很好的描述该事件的发生,同时把要求问题的解设置为该概率过程的某些参数。对于本身就具有随机性质的问题,其主要任务是如何准确的描述和模拟这个概率过程。把不具有随机性质的问题,通过特定的模型转化为具有随机性质的问题,是蒙特卡罗方法应用和研究的主要问题之一。 第二步:实现从已知概率分布中抽样。由概率论的知识可知,各种各样的概率分布都可以按照一定的方式构造出相应的概率模型。当概率 模型构造完成以后,如何准确的产生己知概率分布的随机变量,就成为实现蒙特卡罗方法的关键步骤。从另一个方面来讲,如何产生合适的随机变量也是蒙特卡罗方法随机抽样原理的重要体现。通常情况下,一个最典型的概率分布是(0,l )区间上的均匀分布。同时,这种分布也是最简单的概率分布,在这种分布上产生的随机变量就是我们常说的随机数。具有相同分布的随机数构成的一个序列就是随机数序列,随机数序列中的各个子样都是相互独立的。因此,随机数的产生问题,就演化为从己知的概率分布中抽样的问题。随机数的独立性就保证了抽取的样本是若干次独立的试验,这样就保证了样本的多样性。具有这些特性的样本总体就能准确的表达相应的概率分布,这就是蒙特卡罗方法的重要特征。 第三步:建立各种估计量。通常情况下,要实现蒙特卡罗模拟试验,首先要构造概率模型,然后从已经的概率分布中抽样,最后还要设置一个合适的随机变量。使该随机变量恰好是所求问题的解,我们称之为无偏估计。在前两步的基础上,建立各种估计量,相当于对模拟实验的结果进行考察和登记,进而得到所求问题的解。 3 粒子滤波的基本原理 3.1 序列重要性采样 序列重要性采样算法,是一种通过蒙特卡罗模拟实现递推的贝叶斯滤波的技术。它的主要思想可以描述为:利用一系列随即样本的加权和来表示所需状态的后验概率密度,进而得到状态的估计值。当样本点增至无穷大时,蒙特卡罗特性与后验概率密度的函数表示等价,515滤波器逼近最优的贝叶斯估计。重要采样技术是一个关键的步骤,因为粒子的权值就是根据重要采样技术来选择的,所以提议分布的设计是一项重要的工作。如果粒子是根据重要密度q (x0:k|z0:k )选择的,那么粒子的权值可以表 示为: 预测阶段: 上海大学2013 ~2014学年秋季学期 研究生课程小论文 课程名称:随机信号导论课程编号:07SB17002 论文题目: 扩展卡尔曼滤波和粒子滤波算法比较 研究生姓名: 班孝坤(33%)学号: 13720843 研究生姓名: 倪晴燕(34%)学号: 13720842 研究生姓名: 许成(33%)学号: 13720840 论文评语: 成绩: 任课教师: 刘凯 评阅日期: 扩展卡尔曼滤波和粒子滤波算法比较 第一章绪论 在各种非线性滤波技术中, 扩展卡尔曼滤波是一种最简单的算法, 它将卡尔曼滤波局部线性化,适用于弱非线性、高斯环境下。卡尔曼滤波用一系列确定样本来逼近状态的后验概率密度, 适用于高斯环境下的任何非线性系统。粒子滤波用随机样本来近似状态的后验概率密度, 适用于任何非线性非高斯环境, 但有时选择的重要性分布函数与真实后验有较大差异, 从而导致滤波结果存在较大误差, 而粒子滤波正好克服了这一不足, 它先通过UKF产生重要性分布, 再运用PF 算法。通过仿真实验, 对其的性能进行比较。 严格说来,所有的系统都是非线性的,其中许多还是强非线性的。因此,非线性系统估计问题广泛存在于飞行器导航、目标跟踪及工业控制等领域中,具有重要的理论意义和广阔的应用前景。 系统的非线性往往成为困扰得到最优估计的重要因素,为此,人们提出了大量次优的近似估计方法。包括EKF,基于UT变换的卡尔曼滤波(UKF),粒子滤波,等等。 第二章 扩展卡尔曼滤波介绍 2.1 扩展卡尔曼滤波的理论(EKF ) 设非线性状态空间模型为: 11(,)(1)(,) (2) t t t t t t x f x v y h x n --== 式中t x R ∈和t y R ∈分别表示在t 时刻系统的状态和观测,t v R ∈和t n R ∈ 分别表示过程噪声和观测噪声,f 和h 表示非线性函数。 扩展卡尔曼滤波(Extended kalman filter,以下简称EKF)是传统非线性估计的代表,其基本思想是围绕状态估值对非线性模型进行一阶Taylor 展开,然后应用线性系统Kalman 滤波公式。 EKF 是用泰勒展开式中的一次项来对式(1)和 ( 2 ) 中的非线性函数f 和h 进行线性化处理, 即先计算f 和h 的雅克比矩阵, 然后再在标准卡尔曼滤波框架下进行递归滤波。t v 和t n 均为零均值的高斯白噪声。 2.2 扩展卡尔曼滤波的算法 EKF 的算法同KF 一样, 也可分为两步预测和更新。如图2.1所示 图 2.1目标跟踪算法综述
扩展卡尔曼滤波和粒子滤波算法比较
粒子滤波的目标跟踪算法研究与实现
定位追踪方法与制作流程
目标跟踪算法
基于粒子滤波的目标跟踪算法浅析
扩展卡尔曼滤波和粒子滤波算法比较
相关主题
文本预览