一类双自由度碰撞系统擦边运动分析
徐洁琼李群宏*
(广西大学数学与信息科学学院,南宁,530004)
摘要:本文运用Poincare映射方法,解析的导出了一类双自由度碰撞系统的擦边周期n运动的存在性判据,经过数值模拟验证了理论分析的正确性。然后用不连续拉回(discontinuity bypass mapping)映射的方法,在擦边周期n轨道附近建立Poincare映射, 用此分析擦边周期轨道的稳定性并通过数值迭代说明了此系统擦边周期轨道的稳定性及擦边分岔情况。
关键词擦边碰撞; Poincaré映射; 存在性; 稳定性
Grazing analysis of a two-degree-of-freedom
vibro-impact system
Xu Jieqiong Li Qunhong
(College of Mathematics and Information Science, Guangxi University, Nanning, 530004, China)
Abstract This paper gets an existent criterion of grazing periond-n motion by using the method of poincare mapping and proves its validity. A local analysis based on the discontinuity-mapping approach is employed to derive the Poincare mapping near the grazing trajectory. Then we discuss the stability of grazing period trajectory and grazing bifurcations through a combination of numerical simulations and the local anlysis.
Key words grazing impact Poincare existence stability
引言
碰撞现象存在于大量的机械系统中,它导致动力机械系统具有强非线性和不连续性,造成了非常复杂的动力学行为。许多学者对碰撞振动这种复杂的动力学行为进行了广泛的研究。早期的研究主要针对单自由度碰撞系统[1-5],在多自由度碰撞系统研究方面,Aidanpaa和Gupta[6]用解析的方法求出了一类二自由度碰撞振动系统的周期运动,但表达式十分复杂,无法用来进行动力学分析。罗冠炜[7]对一类二自由度碰撞系统研究了余维二的Hopf分岔。李群宏、陆启韶[8]研究了一类双自由度碰振系统,给出了次谐周期运动的存在性、稳定性、和共存性的结果。当振子与边界以零速碰撞时,产生了一种特殊的碰撞现象,擦边碰撞。擦边碰撞会导致碰撞系统动力学行为的不确定性。早在1983年,Shaw & Holmes[9]在研究一个简谐激励下有约束的单自由度刚性碰撞振子时就最早发现了零速碰撞会导致奇异性的发生。Whiston[10]在研究简谐激励下无阻尼线性冲击振子时,首先用奇异性理论研究了擦边碰撞的Poincare影射不可微性,说明了碰撞振动的复杂运动形式与擦边现象具有内在的联系。Nordmark[11]在这类单自由度碰振系统的研究中发现了擦边碰撞现象,并首次建立了冲击振子碰撞运动的Poincare--Nordmark影射。Chin[12]等人对
Poincare —Nordmark 映射做单参数开折后详细研究了它的性质,发现该映射具有十分复杂的动力学行为。Fredriksson & Nordmark[13]推广了以前的工作,通过引入不连续拉回映射(discontinuity bypass mapping )建立起了多自由度冲击振子的poincare 映射及规范型的计算,并推出了擦边轨道稳定的条件。Thota & Dankowicz[14]把擦边周期轨道附近吸引子存在条件推广到准周期擦边轨道。张思进,陆启韶,吴宪芳等[15-16]等通过建立不连续映射对一类碰摩系统的碰擦分岔进行了分析。
本文对一个具体的双自由度碰撞系统进行了研究,用解析的方法给出了该系统擦边周期轨道存在性判据。并在擦边周期轨道附近建立了不连续映射,对擦边周期轨道的稳定性进行分析。
1擦边周期运动的存在性分析
考虑由质量为1M ,2M 组成的两自由度碰撞振动系统(如图1所示),记时间为T ,线性弹簧刚度分别为12,K K ,两个质块只作水平方向的运动,并分别受到简谐激励力
sin()(1
,2)i P i τΩT+=的作用。当质块1M 的位移1()X t 等于B 时,质块1M 将与刚性约束A 碰撞。碰撞过程由碰撞恢复系数R
确定,碰撞持续时间略去不计。
图1 碰撞振动系统 Fig.1 A vibro-impact system
在相邻两次碰撞之间,振动系统的运动微分方程为
2
111
122211************sin()M X C C d d M X C C C dT dT
K K X P K K K X
P τ-??????++??????
-+??????-??????=ΩT +??????-+??????
(1) 质块1M 的冲击方程为
111()X RX X B +-
=-= (2)
式中1X + 和1X -
分别表示质块1M 与刚性约束A 碰撞前后的瞬时速度。
方程(1)和(2)的无量纲形式为 112212*********(1)1
11sin()
11m c k x x x x x f t x f ζζμζζμωτμ-????????++????????-+????????--??????=+??????-+?????
?
(3)
111()x Rx x b +-=-= (4)
其中无量纲为
12m M M μ=
, 21k K
K μ=, k c μμ=, 2
212
P f P P =
+
,ω=
t =
ζ=
112BK b P P =+,112
i i X K x P P =+,
12
i x
= (5) 令ψ表示方程(3)的正则模态矩阵,1ω和
2ω表示在无碰撞情况下振动系统(3)的
固有频率。取ψ为变换矩阵,做如下坐标
变换
X ξ=ψ (6)
式中,()1
2T X x x =;()12T
ξξξ=。经
坐标变换(6),方程(3)可解耦为
sin()I C F t ξξξωτ++Λ=+ (7)
式中,I 是一个22?阶的单位矩阵。
2
2
1
222C diag ζω
ζω??=??,
221
2,T diag F P ωω??Λ==ψ??, ()221,T
P f f =-。
通过模态叠加法可以得到方程(3)的解。设方程(3)的通解为
2
1
((cos sin )
sin()cos())
i t i ij j dj j dj j j j x e a t b t A t B t ηωωωτωτ-==ψ+++++∑
(8)
2
1
(()c o s ()s i n )c o s ()s i n ()
(
1,2)
j t
i i j j
d j j j d j
j j j j d j d j j
j x
e b
a t
b a t A t B t i ηωηωηωωωωτωωτ
-==ψ--+++-+=∑
(9)
式中,ij ψ是正则模态矩阵ψ的元素;
2j j ηζω=
,dj ω=j a 和j b 是
积分常数,由振动系统的初始条件和模态矩阵参数确定;j A ,j B 为振幅常数,且
2222
12(
),()()j dj
dj dj
j dj j dj j
A f ωωωωωωωηωωη=?
+--++-+2222
211
(
).
()()j
j dj
j dj j dj j B f ηωωωηωωη=?
-++-+
本文用解析的方法讨论无阻尼碰撞系
统(1)存在擦边周期 n 运动的条件,即考虑周期为nT 的擦边周期解的存在性问题,这里2/T πω=,n ∈Z 。当质块1M 与约束A 接触时速度为零且加速度为负,则发生了擦边运动。
碰撞系统(1)的相空间为1
4
R R ?。
记11v x
= ,22v x = ,并定义 ∑={()1212,,,,x x v v t ∈S R ?4
︱1x b =}
(10)
式中{(mod(2/))S t n πω=︳}+
∈R
t 。
设系统在0t 时刻与约束面发生擦边,擦边点用10201020(,,,)x x v v 表示。由初始条件
10102020101020(),(),(),()x t x x t x v t v v t ====
20v , 令0t =0,由(8),(9)求得积分常数
11122111222012112211022111221122111122()(sin()sin()cos()cos())a x A x A B B ττττ-=--ψψ+ψψψ-?
ψψ-ψ+ψψ-ψψ+ψψ 12122111222011212211021211222122121122()(sin()sin()cos()cos())
a x A x A B B ττττ-=-ψψ-ψψψ+?
ψψ-ψ-ψψ+ψψ-ψψ 1111221112220122011211221112211112211112211022101221112211122111122111122(())(cos()sin()sin()cos()cos()sin()sin()cos())
d b v x A B A B v x A B A B ωηωτωττητηηωτωττητη-=ψψ-ψψψ+ψ-
ψψ+ψψ-?
ψψ-ψψ-ψ-?ψ+ψψ-ψψ+ψψ+ψψ1221221112220112021110211022121221212212212212212212112221122221122221122(())(cos()sin()sin()cos()cos()sin()sin()cos())
d b v x v x A B A B A B A B ωηηωτωττητηωτωττητη-=-ψψ-ψψψ+ψ-ψ-ψ+?
ψψ-ψψ+?ψψ+ψψ-?
ψψ+ψψ-ψψ-ψψ (11)
由于擦边时1M 的速度为零,由(4)可知擦边前后速度不发生变化。再由周期性条
件:
110220110220
2222(
),(
),(
),(
)n n n n x x x x v v v v π
π
π
π
ω
ω
ω
ω
====和1010,0x b v ==可得:
sin()a b bn n τ=
,cos()c d
bn
n τ= (12)其中
111212,a n A A =ψ+ψ111212,c n B B =ψ+ψ
22211111212222
11122212()2()()b n A B A A B B A B =+ψ++?
ψψ++ψ
如果有
0b n ≠ (13)
又由22sin ()cos ()1ττ+=,就可以得到一个关于b 与系统参数的方程
2222()0a c b n n b n +-= (14)
由通解(8)(9)可知质块1M 在擦边时刻
102010200(,,,,)x x v v t 的加速度
22111122211111111222222222
2222(sin()cos()2)(sin()cos()2)g d d d d A A B a b a A B a b a ωτωτηηωωωτωτηηωω=ψ--+--+ψ-?-+-?
- (15) 再由初始条件,周期条件及1010,0x b v ==得
()
r s t u v g w
n n n n n A b
n ++++= (16)
此处g A 为质块1M 在擦边时刻的动力加速
度。其中 22222212112222221111221122222121212222231112212212212323211122111222222211212212222111222222(()())((2)(2))(())((2)(2))(()(r n A B A A B B A B A B A A B B A B ωηηωηηψψψωηηωηηψψψωψψψψψψηωηηηωψψψη=-++-+
+-++-+?++--+--+--++2-
2221111222211212111221121122))((22)())()
A B A B ωηψψψωωηηψψψψψψ-+-?
--
221122,s s s n m A m B =--
2
11211222
22
442()t t t t n m A A m B B A B m =---+
222211111221112222212111221111122212222111221211122222
2
2
2
2
221112221111222222
222111112222()()()()()()u d d d d d d d d n A B A A B B A B A B ψψψωψψψωψψψωψψψωψψψωψψψωψψψωψψψω=-+--+---+-?
++221112122212342256()()2()()()()
v v v v v v v n A B m m A A B B m m A B m m =++++
+++?+ 222111112122221112221212211122(()2()())()
w n A B A A B B A B ψψψψψψψψ=+++?
++-+
其中s m ,1t m ,2t m ,1v m ,2v m ,3v m ,4v m , 5v m ,
6v m 可参见附录,且它们中的
1
12sin(
)d n n S πωω=,1
12cos(
)d n n C πωω=,
222sin()d n n S πωω=,2
22cos()d n n C πωω
=;
从上述分析可得出以下结论:
定理 若碰撞系统(1)(2)-的参数满足以下
条件:(1)0b n ≠,0d n ≠,(2)二次方程(14)有正实数解,(3)0g A <,则该碰撞系统存在擦边周期n 运动。
2 擦边周期运动的稳定性分析
若令1212(,,,)T X x x v v =,则碰撞系统
的方程(1)可写成标准形式(,)X
F X t = ,其中
12
121221
212(,)22(1)s i n ()12(1)121s i n ()k c m
m m m m v v F X t x x x x f t x x x f t ζζωτμζμζωτμμμμμ?
?
?
?
?=-+-++-
+
?++ ?-+-++ ??? (17)
下面将根据相空间中流的特点建立碰撞系统的Poincare 映射。定义定相位面
2{|mod(),}
n X T T θπ
θθω
∑===
为
Poincare 截面。γ为与约束面A 擦边的一条周期轨线,擦边点为*
*
(,),X θ且
*****1212(,,,)X x x v v =。我们假设在n 个周
期里只擦边一次。1212(,,,)X x x v v =为γ与
θ∑的交点,且()T X X Φ=,()t X Φ为碰
撞系统无碰撞时的流,2n T π
ω
=。设擦边
轨线γ从X 到*
X 的运行时间为1t ,从*
X
到X 的运行时间为2t ,12T t t =+。假如对于截面上θ∑上邻域()B X 内的点仍然保持流映射1()t X Φ的作用,由于1()t X Φ没有考虑可能的碰撞,其像可能是实际上不能达到的点,所以我们需要找一个不连续映射C 使整个Poincare 映射可以写成
21t t P C =ΦΦ 的形式。
在*
X 点的邻域*()B X 内定义距离函
数
1()h X x b =- (18)
当()0h X <质块不与约束面发生碰撞,
()0h X >时对应穿透约束面后的轨线。定
义碰撞面为
*{()|()0}X B X h X ∑=∈= (19)
若将()t X Φ代入(18)式,将得到一个新的函数(,)(())t H X t h X =Φ,该函数表示从X 出发经过时间t 后到约束面的距离。对
于擦边周期运动我们有
*
(,0)0H X =,*(,0)0H
X t
?=?, 2*2(,0)0H
Ag X t
?=
如果把X 限制在碰撞面∑上,根据
(,0)H v X t
?=?可以把碰撞∑分成三个部
分:
{,0}X v +
∑=∈∑> (21)
0{,0}X v ∑=∈∑= (22)
{,0}X v -
∑=∈∑< (23) 这样冲击方程可以看成一个映射
:G +-∑→∑。
从*
X 点的邻域*
()B X 一点X 出发,
(,)H X t 表示随着t 的变化振子与约束面的
距离,由于*
()X B X ∈,(,)H X t 在经过一段很小的时间()X ττ=后会达到局部最
大值。我们引进一个函数 ()X ψ=
(,())H X X τ,用()0X ψ≥表示碰撞点,
可以用来区别()0X ψ<的非碰撞点。
对一个碰撞点定义一个映射C t Φ,C t 表示从碰撞点到+
∑经过的时间,它把碰撞点映射到碰撞面上,再有碰撞映射G 得到碰撞后的点C t G Φ ,由于我们考虑的是瞬时碰撞,为了保证碰撞时间为零,我们再经过一
个映射C t -Φ,得到不连续穿透映射C
0()0
C C
t t G C X I ψψ-ΦΦ≥?=?
当当 (24) 下面对这个具体系统来确定碰撞时该映射的近似表达式。
首先由碰撞函数可得
1()X G X X v ξ?=-=- (25)
将(,)H X t 对时间t 在时间()X τ时刻附近
展开,得到
(,)()(())/2((),)
H X t X t X Ag o X t ψτψ=+-+
(26)
引进新变量χ代替X ,其分量
除
1χ=2()X χτ=外,其它的保持
不变。将(26)改写成
2212(,)()/2(,)
H t t Ag o t χχχχ=+-+ (27) 由(,)0C H t χ=,从(27)可得
21()C t o χχ=+ (28)
为了把X ?表示成χ的函数需要把1v 表示成χ的函数
11(,)()C H v t o t χχ?=
=+? (29)
所以
()
X o χχ?=-+ (30) 在擦边点*
X 附近对流进行展开得
*()()(,)t X X F X t o X t Φ=++ (31)
所以
*()()()C t C X X F X t o χΦ=++ (32)
再由(30),得
*()()()C t C G X X t F X o χχΦ=+-
+ (33) 最后得
()()C C t t G X X o χχ-ΦΦ=
-+ (34) 所以
()()C X X o X =+
(35) 由上可知整个局部Poincare 映射可表示为 21t t P C =ΦΦ ,我们令10t →,Poincare
映射可表示成T P C =Φ ,线性化T Φ和
()X ψ,
*()T
L X X
?Φ=
? ,2()()X X o X ψη=+。其中*
()h X x η?=?。最后得
()0()0P X X K X X LX ηξη=
?≥+??
当当 (36)
()K X 是()O X 的函数。
当擦边分岔参数变化,映射P 有一个稳定的
周期点X 且()0X ψ>。令()X d ψ=,为
使Poincare 映射的周期解继续对应零点,任
用X 表示,映射P 可表示为以下形式:
()()P X X d K X X d
LX ηξη=
?≥-+
?
??
<-?
当当
(37)
下面我们分析擦边周期轨道的稳定性。
由于映射在0X =处具有奇异性,所以不能直接求出P 的Jacobi 矩阵判断擦边周
期运动的稳定性,但我们可以通过对上面求
出的局部Poincare 映射进行数值迭代,从得
到的数列来看擦边周期轨道是否稳定。 很明显(1)若L 的特征根的模全部在
单位圆内,且从非碰撞区出发的点一直停留
在非碰撞区,则擦边周期轨道是稳定的。
从碰撞区出发的点如果重复碰撞,由于
平方根的迭代,擦边周期轨道将不稳定。如
果要擦边周期轨道稳定需要避免重复碰撞。
如果对于所有的0i >都有0i
L ηξ>,就可
以避免重复碰撞。所以
(2)若L 的特征根的模全部在单位圆
内,且对于所有的0i >都有0i
L ηξ>,则
擦边周期轨道稳定,若对任意一个0i >有
0i L ηξ<,则擦边周期轨道不稳定。我们称
此为擦边轨道稳定性原则。由已知的结论可知:从擦边轨道稳定性原则可以推出,若擦边周期轨道稳定,则L 的最大特征值λ必须是实数且0λ>。
3 数值仿真
对系统(1)取参数2,
m μ=5,k μ=
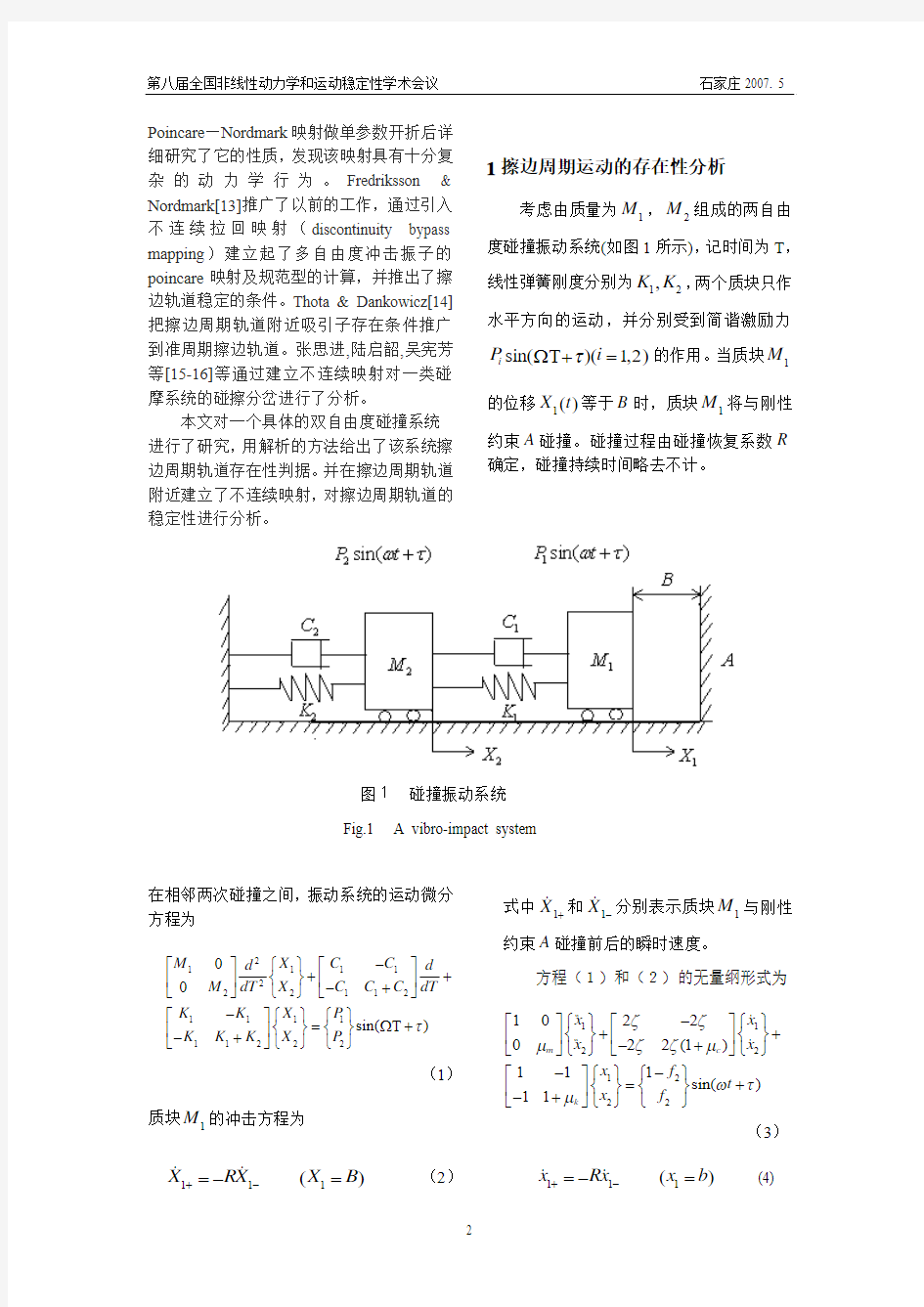
21,0.8,0, 1.766,0.3R f b ωζ=====。
代入(16) 1.723Ag =-,再把参数代入(13)
(14),定理的3个条件全部满足。取同样的
参数对系统(1)进行仿真,得到一个擦边周期1运动,如图2(a),(b)中分别为振子1M 的相图和时间历程图。同样我们可以用定理验证其它周期n 运动。下面我们对存在的这个擦边周期1轨道进行稳定性分析。为此我们需要写出Poincare 映射(36)的详细表达式。(37)也可以相应的写出。 对于系统(1),有
(1,0,0,0)η=,(0,0,1,0)R ξT =+ (38)
11
12131321
2223243132333441
42
43
44a a a a a a a a L a a a a a a a a ?? ? ?
= ? ???
(39) 其中(,1,2,3,4)ij a i j =的具体表达式可参看附录,把(38)、(39)代入(36),于是擦边点附近的映射可近似为:
11111(1)(1)(1)(1)0n n n n x R a y R a x
R a y R a x ++++?=-+?
=-+??
=-+??
=-+??≥?
当 (40) 1111213141212223241313233341
4142434410n n n n n n n n n n n n n n n n n n n n x a x a y a x a y x a x a y a x a y x a x a y a x
a y x a x a y a x a y x ++++=+++??=+++??
=+++??=+++?
当
(41)
(a)1x 振子的相图 (a) Phase portrait of the oscillator 1x
(b)1x 振子的时间历程
(b) Time response of the oscillator 1x
图2 擦边周期1运动
Fig.2 Grazing period-1 motion
当参数取
2,m μ=5,k μ=1,ω=
20.8,0, 1.766,
0.3
R f b ζ====时,130a <,
这说明碰撞点经过映射(40)仍在碰撞区,平方根将一直迭加下去,由于平
方根不断迭加,不会稳定到擦边周期轨
道,所以擦边周期轨道不稳定。如图3,轨线在擦边点处发生跳跃。
图3 映射系统分岔图
Fig 3 Bifurcation diagram of mapping system
当参数取
8,5,m k μμω===
20.8,0,0.985,0.4R f b ζ====时,通过计算此时满足定理的三个条件,通过数值仿
真得到一个擦边周期3轨道。如图5(a),(b)中分别为振子1M 的相图和时间历程图。此时L 的最大特征值λ是虚数,由稳定性原则可知擦边周期轨道也是不稳定。通过数值迭代如图5为映射系统分岔图。
(a)1x 振子的相图
(a)Phase portrait of the oscillator 1x
(b)1x 振子的时间历程
(b)Time response of the oscillator 1x 图4 擦边周期1运动
Fig.4 Grazing period-1motion
图5 映射系统分岔图
Fig 5 Bifurcation diagram of mapping system
4 结 论
本文证明了碰撞系统擦边周期轨道的
存在并在擦边周期轨道附近建立了Poincare 映射,然后主要通过研究此不连续映射来分析擦边周期轨道的稳定性,由于在擦边处映射具有奇异性(含有的平方根项导致的),不能直接求出Jabobi 矩阵来证明擦边周期轨道的稳定性。通过对所求的两个映射进行数值迭代,从所得的数列看是否收敛来判断擦边周期轨道的稳定性。当线性矩阵L 的特征根都在单位圆内时,在一定条件下擦边周期轨道是稳定的,且根据最大特征根的不同,可以得到不同的参数分岔序列。本文结合局部理论分析和数值仿真说明了擦边周期轨道的稳定性并得到了两种擦边分岔序列。 参考文献
Ivanov A P.Stabilization of an impact near grazing incidence owing to system having rigid amplitude I-Subharmonic motions and
local bifurcation. J. Appl. Mech., 1985, 52: 453- 458
[3].Shaw S W.The dynamics of a harmonically excited system having rigid amplitude constraints:part II-Chaotic motions and global bifurctions.J.Appl.Mech.,1985,52:459-464 [4].Whiston G S.The vibro-impact response of a harmonically excited and preloaded one- dimensional linear oscillator.J.Sound Vib., 1987, 115(2) :303-319
[5].Whiston G S Global dynamics of a vibro-impacting linear oscillator, J.Sound Vib., 1987, 118(3):395-424
[6]. Aidanpaa J O,Gupta R B.Periodic and chaotic behaviour of a threshold-limited two- degree- of-freedom system.J.Sound and Vib.,1993,165(2):305-327
[7].G .-L. Wen Codimension-2 Hopf Bifurca- tion of a two-degree-of-freedom vibro-impact system.,J.Sound and.Vib. ,2001, 242(3): 475- 485
[8].李群宏,陆启韶.一类双自由度碰振系统运动分析.力学学报,2001,33(6):366-376 [9]. Shaw SW.,Holmes PJ. A periodically forced impact oscillator with large dissipation . J App Mech, 1983, 50: 849-857
[10].Whiston G S. Singularities in vibro- impact dynamics Journal of Sound and Vibration, 1992,152(3): 427~460
[11].Nordmark A B. Non-periodic motion caused by grazing incidence in an impact oscillator .J Sound and Vib,1991,145(2): 279-297
[12].Chin W, Ott E,Nusse H E, et al Grazing bifurcations in impact oscillators. J Phys Rev. E1994,50(6):4427-4444
[13]. Fredriksson M H, Nordmark A B. Bifurcations caused by grazing incidence in many degrees of freedom impact oscillators. Proc.R.Soc.Lond.A,1997,453: 1261-1276
[14].Thota,Dankowicz. Continuous and dis- continuous grazing bifurcation in impacting oscillators .J Physica D, 2006, 214: 187-197 [15].吴宪芳,唐云.转子系统碰擦分岔的复杂性.J T singhua U niv (Sci & Tech) 1999, 39(10): 112-115 [16].张思进,傅衣铭.一类转子碰摩映射的分岔分析.J Vibration Engineering 2005, 18(4): 389-394
附录
11ψ=
121/ψ=
211(2m ψ=
21(1/2k m μμμψ=--+21122122111122111122221221
111221112212211122122111221122111222cos()cos()sin()sin()()()t t t t d d d d d d e t e t e t e t a ηηηηωωωηωηωω----ψψψψψψψψ=--+
ψψ-ψψψψ-ψψψψ-ψψψψ-ψψ12121121121122111112221211
121221112212211122122111221122111222
cos()cos()sin()sin()()()t t t t d d d d d d e t e t e t e t a ηηηηωωωηωηωω----ψψψψψψψψ=-++
ψψ-ψψψψ-ψψψψ-ψψψψ-ψψ
121112221221
13122111221122111222sin()sin()()()t t d d d d e t e t a ηηωωωω--ψψψψ=-+
ψψ-ψψψψ-ψψ121111221112
14122111221122111222
sin()sin()()()t t d d d d e t e t a ηηωωωω--ψψψψ=-
ψψ-ψψψψ-ψψ12121222122122112122222221
211221112212211122122111221122111222
cos()cos()sin()sin()()()t t t t d d d d d d e t e t e t e t a ηηηηωωωηωηωω----ψψψψψψψψ=-+-+
ψψ-ψψψψ-ψψψψ-ψψψψ-ψψ12121122121122111221221122
221221112212211122122111221122111222
cos()cos()sin()sin()()()t t t t d d d d d d e t e t e t e t a ηηηηωωωηωηωω----ψψψψψψψψ=-+-
ψψ-ψψψψ-ψψψψ-ψψψψ-ψψ121212222122
23122111221122111222sin()sin()()()t t d d d d e t e t a ηηωωωω--ψψψψ=+
ψψ-ψψψψ-ψψ121122121122
24122111221122111222
sin()sin()()()t t d d d d e t e t a ηηωωωω--ψψψψ=-
ψψ-ψψψψ-ψψ11
2
2
22
1211112222122112
3112211122
()sin()()sin()t
t t t d d d d d d e e t e e t a ηηηηηηωωωωωω----+ψψ-+ψψ=
ψψ-ψψ122222111121121112221
2
3212211122
sin()()
sin()()
t t d d d d d d e t e t a ηηωψψηωωψψηωωωψψψψ--++-+
=
-21
2222112122111122
21
3312211122
sin()sin()(cos())(cos())t
t d d d d d d t t e
t e t a ηηηωηωωωωω---+ψψ--ψψ=
ψψ-ψψ1211111112
22221112
1
2
3412211122
(sin()cos())(sin()cos())t t d d d d d d d d e t t e t t a ηηωηωωψψωηωωψψωωψψψψ-----
+
=
-11
2
2
22
1211212222222112
4112211122
()sin()()sin()t
t t t d d d d d d e
e t e e t a ηηηηηηωωωωωω----+ψψ-+ψψ=
ψψ-ψψ122222112211121122221
2
4212211122
sin()()
sin()()
t t d d d d d d e t e t a ηηωψψηωωψψηωωωψψψψ--++-+
=
-12
2211221222122122
12
4312211122
sin()sin()(cos())(cos())t
t d d d d d d t t e
t e t a ηηηωηωωωωω--+ψψ--ψψ=
ψψ-ψψ
1211112112
22221122
1
2
4412211122
(sin()cos())(sin()cos())t t d d d d d d d d e t t e t t a ηηωηωωψψωηωωψψωωψψψψ---+-+
=
-
22221121121211221221112212111211212212112222212112112222112212
2121122((1)((1)())(1))()()((1))()((1)(1)(((1))(1s n n n n n n n n n n n n n n n n m C C C C S C S A C S S A C C S S C S ηηψψψψψωωψωψψωψψψψψωωωψψωψψ=-+-+-+--+---+-+-+-++-+++-+22222211121222222112112212122121122212211221211221222112212212112((1))))))/(()
(((1))((1)))(()(1)((1)(1))(((1))n n n n n n n n n n n n n n n n n n n C C C S A A C S S S C S S S C S C C S C S ωψψωωψψψψωωψψωψψωωψψωψψ--+++--+-+-++-+-+-++-+--+-+2222222(1((1))))))
n n n n C C C S ω-+-++
22121121122212111221121122121112112211221122212112112222212112222112((1)((1)())(1))()()(((1))()((1)(1)(1)(((1t n n n n n n n n n n
n n n n n n m C C C C S C S A C S S A C C S S S S C ηηψψψψψψωωψωψψωψψψψψωωψψωωω=-+-+-+--+---++-+-+-++-++-+22221122
2
112222222111212222221121122212221121122212212112211221211))(1((1))))))/(()(((1))((1)))(()(1)((1)(1))(((n n n n n n n n n n n n n n n n n n n S C C C S A A C S S S C S S S C S C C S ψψωψψωψψωωψψψψωωψψωψψωω++-+--+++--+-+-++-+-+-++-+22222112211222222221))(1((1))))))
n n n n n n C S C C C S ψψωψψω-+-+-+-+
2222112112222121221121122121112112211221122212112112222212112222112((1)((1)())(1))()()(((1))()((1)(1)(1)(((1)t n n n n n n n n n n
n n n n n n n m C C C C S C S A C S S A C C S S S S C ηηψψψψψωωψωψψωψψψψψωωψψωωω=-+-+-+--+---++-+-+-++-++-+22221122
2112222222111212222221121122212221121122212212112211221211)(1((1))))))/(()(((1))((1)))(()(1)((1)(1))(((1n n n n n n n n n n n n n n n n n n S C C C S A A C S S S C S S S C S C C S ψψωψψωψψωωψψψψωωψψωψψωω++-+--+++--+-+-++-+-+-++-+-2222211221122222222))(1((1))))))
n n n n n n C S C C C S ψψωψψω+-+-+-+
3222222111211111212122112121222222
1111121211122212(()())()
()2()()d d v A B A A B B m A B A A B B A B ψψψψψηηωωψψψψ+++-+-=+++++ 22222222111211111212122112122222222
1111121211122212(()())()
()2()()d d v A B A A B B m A B A A B B A B ψψψψψηηωωψψψψ+++-+-=
+++++ 3222222111212121122122212123222222
1111121211122212
(()())()
()2()()d d v A A B B A B m A B A A B B A B ψψψψψηηωωψψψψ+++-+-=+++++
22222222111212121122122212124222222
1111121211122212(()())()
()2()()d d v A A B B A B m A B A A B B A B ψψψψψηηωωψψψψ+++-+-=+++++ 3222222111211111212122112125222222
1111121211122212(()())()
()2()()d d v A B A A B B m A B A A B B A B ψψψψψηηωωψψψψ+++-+-=+++++ 3222222111212121122122212126222222
1111121211122212(()())()
()2()()d d v A A B B A B m A B A A B B A B ψψψψψηηωωψψψψ+++-+-=
+++++
“搏彩2000”释义------ 口号解析---- 策划理念---- 市场背景---- 市场营销现状------------ 机会与问题分析--------- &nbs p;营销目标---- 市场营销策略------------ 行动规划---- 本策划案几点说明------ “搏彩2000”释义 “搏彩2000”寓义有二:一是为山东体育彩票事业在2000年蓬勃发展而拼搏;二是为山东体育彩票每期销售额突破2000万元大关而拼搏。“搏彩”由“博彩”演化而来,既体现行业特性又极富进取精神,颇具煽动性和前瞻性,更利于在营销活动中统一组织者思想,同时唤起千百万彩民发大财的欲望,进而扩大山东体育彩票的市场容量。 口号解析 本次营销活动的口号定位: 博世纪头彩,圆奥运金梦。 博:博取,取得。头彩:最高奖励,最大成功。 奥运:奥林匹克运动会。
金梦:金牌之梦,特指2000年悉尼奥运会山东体育彩票实现金牌零的突破。 该口号涵义为: 山东省体育彩票管理中心在新的世纪、新的一年,以勇于拼搏、争创一流的精神,通过扎实有效的工作争取名列同行业前茅,进而实现齐鲁奥运健儿的夺金梦想,促进山东体育的腾飞! 策划理念 彩票是一种特殊的商品,它有着其他商品无法比拟的价值,它把彩民的社会责任感(支持体育事业)、潜伏的巨大商机(发财梦)、美好的理想(对富裕生活的向往)和谐地柔和在一起,它有着最为广泛的消费群体。 策划的唯一目的是为了把这种特殊商品更好的销售,而只有站在大营销的角度,才能更加科学、更加系统、更为行之有效地促进销售,广告只是市场营销中的主要战术武器。 山东省体育彩票管理中心目前面临的最大难题是大市场营销问题,解决这种问题不仅需要一般的商业技能(广告手段),而且需要机敏的政治手段(权力影响加新闻炒作)和公共关系技能。 本营销方案的策划便是基于这一主导思想。 市场背景 目前,世界上发行彩票的国家有100多个,其中发行体育彩票的国家有80多个,年均销售量1200亿美元。其中新加坡年人均达到406美元,香港92美元,日本48美元,马来西亚25美元。我国人均年购买额为0.6美元。 从1985年开始,中国的体育彩票开始兴起,近几年来,广东、四川、上海、江苏等省市的体育彩票发挥天时地利优势,市场繁荣,今年势头更旺,每期都有较高的销售额。其中上海每期平均为520美元,成都最高一期已突破2000万元,并且都已开出大奖(广东大奖500万元、上海、南京分别为300万元)。大奖煽动起无数彩民持续疯狂的投入,这一方面展示了中国体育彩票广
分岔与混沌理论与应用 学院: 专业: 姓名: 学号:
我对混沌理论的认识 1、混沌理论概述 混沌是指发生在确定性系统中的貌似随机的不规则运动,一个确定性理论描述的系统,其行为却表现为不确定性--不可重复、不可预测,这就是混沌现象。混沌现象起因于物体不断以某种规则复制前一段的运动状态,而产生无法预测的随机效果。所谓“差之毫厘,失之千里”正是此一现象的最佳批注。具体而言,混沌现象发生于易变动的物体或系统,该物体在行动之初极为简单,但经过一定规则的连续变动之后,却产生始料所未及的后果,也就是混沌状态。但是此种混沌状态不同于一般杂乱无章的混乱状况,此一混沌现象经过长期及完整分析之后,可以从中理出某种规则出来。混沌现象虽然最先用于解释自然界,但是在人文及社会领域中因为事物之间相互牵引,混沌现象尤为多见。 混沌理论,是近三十年才兴起的科学革命,它与相对论与量子力学同被列为二十世纪的最伟大发现和科学传世之作。混沌的发现揭示了我们对规律与由此产生的行为之间--即原因与结果之间--关系的一个基本性的错误认识。我们过去认为,确定性的原因必定产生规则的结果,但它们可以产生易被误解为随机性的极不规则的结果。我们过去认为,简单的原因必定产生简单的结果(这意昧着复杂的结果必然有复杂的原因),但简单的原因可以产生复杂的结果。我们认识到,知道这些规律不等于能够预言未来的行为。这一思想已被一群数学家和物理学家,其中包括威廉·迪托(William Ditto)、艾伦·加芬科(Alan Garfinkel)和吉姆·约克(Jim Yorke),变成了一项非常有用的实用技术,他们称之为混沌控制。实质上,这一思想就是蝴蝶效应。初始条件的小变化产生随后行为的大变化,这可以是一个优点;你必须做的一切,是确保得到你想要的大变化。对混沌动力学如何运作的认识,使我们有可能设计出能完全实现这一要求的控制方案。这个方法已取得若干成功。 2、分叉的概述 分叉理论研究动力系统由于参数的改变而引起解的拓扑结构和稳定性变化的过程。在科学技术领域中,许多系统往往都含有一个或多个参数。当参数连续改变时,系统解的拓扑结构或定性性质在参数取某值时发生突然变化,这时即产
体育(physical education,缩写PE或P.E.),是一种复杂的社会文化现象, 它以身体与智力活动为基本手段,根据人体生长发育、技能形成和机能提高等 规律,达到促进全面发育、提高身体素质与全面教育水平、增强体质与提高运 动能力、改善生活方式与提高生活质量的一种有意识、有目的、有组织的社会 活动。体育行业的定义及分类介绍如下: 体育行业定义 体育的含义有狭义和广义的区分。狭义的体育即身体教育,是通过身体活动,增强体质,传授锻炼身体的知识、技能、技术,培养道德和意志品质的有 目的有计划的教育过程。它是教育的组成部分,是培养全面发展的人的一个重 要方面。 广义的体育即社会文化活动。体育(广义的,亦称体育运动)是指以身体 练习为基本手段,以增强体质,促进人的全面发展,丰富社会文化生活和促进 精神文明建设为目的的一种有意识、有组织的社会活动。它是社会总文化的一 部分,其发展一定社会的政治和经济的制约,也为一定社会的政治和经济服务。体育文化的一个组成部分,是根据人生理、心理发展规律,以专门性的身体活 动为基本手段,增强体质,发展人体运动能力,提高人们生活质量的一种有目的、有价值的社会活动。 体育行业分类 竞技运动 亦称“竞技体育”。指为了战胜对手,取得优异运动成绩,最大限度地发挥 和提高个人、集体在体格、体能、心理及运动能力等方面的潜力所进行的科学的、系统的训练和竞赛。含运动训练和运动竞赛两种形式。特点是:1)充分调动和发挥运动员的体力、智力、心理等方面的潜力;2)激烈的对抗性和竞赛性;3)参加者有充沛的体力和高超的技艺;4)按照统一的规则竞赛,具有国际性,成绩具有公认性;5)娱乐性。当今世界所开展的竞技运动项目是社会历史的产物。远在公元前700多年的古希腊时代,就出现了赛跑、投掷、角力等项目, 发展至今已有数百种之多。普遍开展的项目有田径、体操、篮球、排球、足球、乒乓球、羽毛球、举重、游泳、自行车等。各国、各地区还有自己特殊的民族 传统项目,如中华武术,东南亚地区的藤球、卡巴迪等。
机械系统运动方案及结构分析 1
32 七、 机械系统运动方案及结构分析实验 (一) 实验目的 1. 了解几种典型机械的传动方案、 各种零部件在机械中的应 用及各种机械的基本结构; 2. 经过对机械的传动方案及结构的分析, 掌握机械运动方案和 结构设计的基本要求, 培养机械系统运动方案设计能力、 结构设计能力和创新意识。 (二) 实验设备及工具 1. 实验设备 ①斗式上料机 ②带式运输机 ③螺旋传动装置 ④冲压机床 ⑤步进输送机 ⑥分度及冲压装置 ⑦转位及输送装置 2. 实验工具 扳手、 卡尺、 钢板尺。 (三) 实验内容与方 法 1. 每台设备的主要知识 点 (1) 斗式上料机 设备如图7-1所示, 主要知识点有: V 带传动; 带 传动的张紧装置; 套筒滚子链传动; 链传动的张紧装置; 蜗杆传动; 同步带传动; 螺栓联接的各种形式; 正反转的实现装置; 滚动轴承; 图7-1 1. 链传动 2. 同步带传动 3. 蜗 1 2 3 4 5 6
33 图7-4 1. 带传动 2. 曲柄摇杆 3. 1 2 3 55 6 滑动轴承; 润滑装置; 钢丝绳锁紧装置; 扭 转弹簧等。 (2) 带式运输机 设备如图7-2所示, 主要知识点有: 蜗 杆传动; 联轴器; 轴系部件; 螺栓联接的各种形式; 各种支架; 润滑装置等。 (3) 螺旋传动装置 设备如图7-3所示, 主要知识点有: V 带传动; V 带轮结构; 带传动张紧装置; 螺旋传动; 轴承部件; 螺栓联接的各种形式; 润滑装置等。 (4) 冲压机床 设备如图7-4所示, 主要知识点 有: V 带传动; 带轮结构; 带传动张紧装置; 曲柄滑块机构; 曲柄摇杆机构; 棘轮机构; 螺栓联接的各种形式; 图7-2 1. 传送带 2. 滚筒 3. 蜗杆减速器 4. 联轴器 1 2 3 4 5 图7-3 1. 支架 2. 电动 1 2 3 4
双摆混沌运动分析 本文通过建立双杆摆的动力学模型来分析双杆摆的混沌运动特性。运用matlab 和winpp 对动力学微分方程进行数值求解并绘制时间历程图和相图,分析了混沌运动对初值的敏感性。发现在较小的初值条件下,运用庞加莱映射分析双杆摆明显表现为概周期运动,通过此方法找到在相应条件下由概周期转变为混沌运动的临界值。 本文以均质杆所组成的双杆摆为研究对象,双杆摆模型如图1所示,并建立坐标系,以水平向右为x 轴正方向,以竖直向下为y 轴正方向,C 1、C 2为两个摆杆的质心位置。1θ、2θ为两杆相对于y 轴正方向的摆角。 图1 双杆摆模型 杆1质心C 1的位置11(,)x y 与1θ、2θ的关系如式1所示 111 111sin cos x h y h θθ==- 杆2质心C 2的位置22(,)x y 与1θ、2θ的关系如式2所示 21122 21122 sin sin cos cos x l h y l h θθθθ=+=-- 杆1的动能为 2.2111116T m l θ= 杆2的动能为 22....2221122222121212111cos()622 T m l m l m l l θθθθθθ=++- 杆1的势能为 111111cos V m gy m gh θ=-=- 杆2的势能为 222211222cos cos V m gy m gl m gh θθ=-=--
根据拉格朗日量的公式 1212 222 (2221211211222121212111211212) 1111cos()6622 cos cos cos L T V T T V V m l m l m l m l l m gh m gl m gh θθθθθθθθθθ=-=+--=+++-+++ 对于变量1θ的拉格朗日方程: .11 0d L L dt θθ??-=?? 得 2.....2122121212122121211211111()cos()sin()()sin 0322 m m l m l l m l l m h m l g θθθθθθθθ++-+-++= (8) 对于变量1θ的拉格朗日方程: .22 0d L L dt θθ??-=?? 得 2.....2121212122221212222111cos()sin()sin 0232 m l l m l m l l m gh θθθθθθθθ-+--+= (9) 由于研究的是均质杆的双摆运动,故可得到1212,22 l l h h ==。现令1212,l l l m m m ====,则式8可以退化为 2 .....1221212183cos()3sin()9sin 0l l l g θθθθθθθθ+-+-+= (10) 式9可以退化为 2.....121121223cos()23sin()3sin 0l l l g θθθθθθθθ-+--+= (11) 式(10)和式(11)组成的二阶微分方程组即为双杆摆的动力学方程组,现可以化为四个一阶微分方程组如式(12)所示 112222112212112212122221221211221122129sin()sin 9sin 2()12sin()36sin 3218cos () 9sin()sin 9sin 2()12sin()36sin 3cos()23218cos ()32d dt d dt d g l l g dt l l d g l l g dt l l θωθωωθθθθθωθθωθθθωθθθθθωθθωθθθθθ==------=--------=----+212123sin()sin 2g l θθωθ-- (12) 其中1ω,2ω为杆1和杆2的角速度。
古代体育与古代社会的其他文化领域,如军事、宗教、艺术、教育等互相连系,密不可分。 智力并重 在中国古代众多的体育活动中,不仅有展示速度、力量的项目,还有一种用脑的具有竞争性的智力游戏,这就是以思维与智能的较量为特征的棋类活动。中国有两项古老的棋类竞赛项目——围棋和象棋。几千年来,这玩意开了人们的智慧,又满足了人类的竞争心理。 哲学意味 在世界上所有古文明的体育形态中,我们都可以发现与之相适应的哲学思想,而中国古代体育与传统哲学思想的结合之紧密,是世界上少见的。以竞技、娱乐、养生为内容的中国古代体育,大量引入了一些传统的哲学概念和思想,如“气”、阴阳五行、八卦、天人合一、动静相因相成等,这种状况在武术和养生术中表现得尤为充分。 阶级风尚 古代有些体育项目是因帝王和贵族们特有的生活条件而发展起来,如田猎,最初是军事演习,到秦汉时变成了帝王贵族的娱乐活动。元、明、清三朝,京都的南、西、北三面都辟有广阔的皇家围场,专供皇家贵族打猎用。另外,有些项目则主要流行于士大夫之间,如投壶,它是由“射礼”演变而来的一种游戏。春秋战国时代,贵族们举行歌舞宴乐,其间常有投壶活动。古代体育的阶级性,也在森严的等级制度中体现出来。 长寿观念 商周时代,人们逐渐产生了长寿的思想和愿望,中国古代传统的养生术在健康长寿观念的影响下应运而生,在传统体育中独具东方特色,并对后世产生了深远影响。养生术的发端和发展,与古代医学和哲学有很大关系。有不少养生家同时也是医家或哲学家。 军事需要 在中国传统体育项目中,有相当部分是从军事发展起来,由于战争和军事训练的需要,有助推动古代与军事有关的体育项目的发展,一些娱乐健身活动逐渐从军体训练中分化、演变出来,譬如蹴鞠。在历史中,随着兵器、作战技能和军制的变化,作为军事训练的体育活动也不断演变,角力、举鼎、拳术、奔跑、跳跃、投石、游泳、蹴鞠、马球、武艺等都先后用作军事训练的重要项目。 武举选拔 科举制始于隋文帝开皇十八年(公元589年)。唐代武则天在发展和完善文科举的同时,继承了唐太宗重视选拔将才的做法,于长安二年(公元702年)开创武举制。武举制是武科举的简称,即通过考试选拔武官。这一制度一直延续到清代。用加官进爵的方式吸引和鼓励习武者,表明政府承认了武艺的社会地位。武举制的确立和实施,促进民间尚武风气和武艺
一、我国农村体育发展存在的主要问题 1、农村体育发展不平衡 我国经济的发展在地域上呈现出城市与农村、东部地区与西部地区发展的不均衡性,体育的发展受经济的制约,也呈现出这一特点。城市与农村、东部地区与西部地区、发达地区与欠发达地区农村体育发展不够平衡,特别是体育健身意识、场地设施、经费投入、科学指导等方面较为突出。 2、农村体育人口偏少 体育人口是经济和社会发展到一定历史阶段的人日现象和体育现象。它是一项重要的社会体育指标反映了人们对体育的参与程度,是经济和社会发展程度的一个标志,也是制定社会发展规化与进行发展战略研究的一个重要依据。中国群众体育现状调查与研究显示:城镇中有51.23%的人参加过体育活动,而农村人日中只有28.97%的人参加过。农村不同年龄段参与者的比例明显低于城镇人日,目随着年龄增长,差距不断扩大,呈下降趋势。 3、农村体育资源配置不合理 体育资源配置的不合理是我国转型时期体育发展的必然现象,在农村体育发展过程中,表现得尤为明显。拿体育场馆这一指标来讲,从现有体育场馆资源分布情况来看,我国现有各类体育场馆约近75万个,其中占国土面积16.5%和占人日42%左右的城镇,占全部体育场馆的比重为79.8%,而占国土面积83.5%并拥有58%左右人口的广大农村区却只占20.2%的体育场馆资源。 4、体育健身意识淡薄 农村生产力落后于城市生产力,人们的余暇时间支配也不如城市居民,农民对体育的理解和认识受传统道德和价值观的影响,春播夏管,秋收冬藏,体力劳动量较大,认为劳动就是体育运动,缺少自觉投身和参与的意识。这一切都表明农村体育健身意识的不成熟性,造成体育意识普遍淡薄。 5、农村体育消费水平低 现今农民收入保持快速稳定增长,农民生活质量明显改善,消费水平大幅度提高。但是与城市居民相比,收入和消费水平还存在较大差距。城乡居民之间的收入差距比过去有所扩大。就广大农村地区而言,体育健身消费水平的提高将是一个渐进过程。 6、有组织的体育活动和比赛较少 二、对策 1、搞活农村经济,为农村体育的发展奠定坚实的物质基础 经济是体育发展的基础,经济状况对体育的发展起着决定性的作用,制约和促进体育的发展。农村体育的发展更是受到当地经济发展的影响 2、发展农村体育文化市场,因地制宜,大力发展传统体育项目 开展“体育三下乡”活动,面向农村,服务农民,开展“体育健身设施、体育健身指导、体育科普知识宣传”为卞要内容的活动,增强农民的健身意识,改善农村的健身条件,培养农村居民健康、积极向上的生活方式。用科学、文明的活动占领农村体育文化市场。 3、扩大农村体育人口 现今农村人口到城市务工人员不断增加,流动人口很大的特点,现阶段还要重视“农民工”的体育权和体育管理问题。发展农村社区体育,不断提高农村体育人口的比例,扩大农村体育人口。 4、拓宽农村体育经费来源,加大基础设施建设 实施“农村体育以乡、镇为重点”发展战略,中央投资和国家则政的补贴应该是农村体育经费的重要来源之一,另外,还应广泛吸纳社会捐赠、资助、基金会资助、团体和个人会费等,以弥补开展农村体育活动之不足。 5、健全农村社区体育组织,加强乡镇体育组织网络建设 各级体育部门要会同各级文化部门、农业部门,依托乡镇人民政府式村民委员会,加快文体站(中心)、农民体育协会的建设。同时,开展乡镇单项体育协会和健身指导站(点)的建设,形成县、乡、镇体育组织网络。 6、进一步加强农村乡镇体育骨干队伍建设,注重引导和扶持 体育行政部门有责任、有计划地帮助农村社区培养数量多、能力强的社区体育骨十、体育指导员和积极分了,主要对象是:职工、复退军人、乡村十部、教师、学生或一部分富裕起来的农民或有文化、有体育发展思路的文体专业人员,以确保农村地区能经常性地开展体育活动。农村体育骨干的任务是,通过宣传体育,组织体育活动,提高广大农民的体育健身意识,倡导、培养健康文明的生活方式,组织农民进行体育锻炼并分类进行指导,提高
福彩体彩市场调查问卷 1、你的性别是() A男B女 2、你的年龄段是() A18----25 B26-----35 C36-----45 D46以上 3、你是否有购买彩票的经历( ) A计划在买 B未曾买过 C曾经有过 D最近一段时间正在购买 4、你认为在大学期间购买彩票对你有什么程度的影响() A影响很大 B没有影响 C有影响,但不大 5、你在大学购买彩票的原因是() A中大奖 B娱乐而已 C为中国彩票事业做贡献 D其他(请注明) 6、你每个月购买多少次彩票() A每期都买 B一个星期一次 C一个月一次 D偶尔会买 7、你每个月购买彩票的开支是多少() A低于15元 B低于30元 C30到50元 D高于50元 8、你是哪种购买人群() A公务员 B农民 C学生 9、你的家人朋友对你购买彩票的态度是() A赞成 B反对 C不赞成也不反对 10、你购买彩票是偏爱刮刮乐还是电脑福利彩票() A刮刮乐 B福利彩票 C都喜欢
D都不喜欢 11、你喜欢面额多少的刮刮乐() A2元 B5元 C10元 D20元 E无偏好 12、你喜欢哪种类型的福利彩票()(多选也可) A双色球 B快乐十分 C3D D其他 E无偏好 13、你购买彩票是喜欢顶刮呱(即开票)还是电脑型彩票(大乐透、11选5)() A顶刮呱 B电脑型(大乐透等) C都喜欢 D无偏好 14、你喜欢哪种类型的电脑体育彩票()(多选也可) A大乐透 B11选5 C排3排5 D其他 E无偏好 15、你喜欢面额多少的顶刮呱() A2元 B5元 C10元 D20元 E无偏好 15、你是否希望你家或者大学外有彩票投注站() A希望 B不希望 C无所谓
下肢运动障碍的分析 臀大肌瘫痪表现为躯干后仰,习称挺胸凸肚步态; l 单侧臀中肌瘫痪表现为支撑相躯干向患侧侧弯,患侧肩下掣以限制另一侧骨盆下降,双侧臀中肌瘫痪表现为躯干交替向支撑侧侧弯,称鸭步; l 髋内收肌痉挛表现为交叉步态; l 髋内旋肌群瘫痪表现为仰卧位患侧下肢外旋较另一侧严重,且无法自己回到中立位;l 翘臀畸形的原因首先是腹肌功能不良,也可能是股四头肌瘫痪、小腿后肌群瘫痪的代偿或屈髋肌痉挛; l 患侧迈步相画圈畸形的原因是下肢屈肌向心收缩功能差或伸肌痉挛; l 股四头肌瘫痪表现为患侧负重功能差、膝过伸; l 迈步相膝屈曲不良的原因是伸膝肌群痉挛或屈膝肌群向心收缩功能差,伸膝肌群痉挛与小腿后群肌功能差有关。此种畸形还表现为以屈髋代偿屈膝不足; l 迈步相足偏向内侧,为膝内翻,系膝外翻肌群不能平衡内翻肌群;足偏向外侧,为膝外翻,系膝内翻肌群功能相对差。 l 屈膝肌群痉挛可至异常屈膝,影响站立; l 胫骨前肌瘫痪表现为足下垂,足廓清困难,如伴屈髋代偿表现为跨槛步,轻微者也表现重力缓冲阶段足掌拍地有声; l 小腿三头肌瘫痪时患足后蹬无力,身体向前推进困难表现为躯干前倾代偿、另一侧步幅缩短、足跟离地延迟、患腿单腿负重时前足站困难、患腿单腿跳困难,下坡(楼)困难,脚尖跑步不能;
l 小腿三头肌痉挛表现为马蹄足(常伴前足内收),足廓清困难,踝阵挛,多伴屈髋代偿表现为跨槛步; l 足内翻畸形的原因是内翻肌群功能相对强或痉挛,也与膝内旋不足、小腿后肌群痉挛、趾伸肌瘫痪有关; l 足踝不能为运动提供稳定的支撑表现为患腿单腿站困难,另一侧迈步相缩短; l 前足负重困难表现为患腿单腿前足站不能或维持困难,跑步困难,患腿单腿跳困难,上坡困难等,与小腿三头肌、拇屈肌和足内附肌的瘫痪有关; l 拇屈曲困难可表现为拇背伸过度(如巴宾斯基征)、患足后蹬无力等; l 趾背伸困难可表现为足的远程部分绕第二跖骨形成的纵长轴扭转困难; l 站起困难尤其是矮凳坐站起困难的原因是不敢使重心前移、下肢伸肌向心收缩能力差、挺腰不及时; l 坐下困难的原因是重心过早后移; l 不能维持蹲位的原因是重心后移,也与小腿后肌群对胫骨的控制不良有关; l 步行时重心过度移向非瘫痪侧的原因是患侧负重能力差,也与患侧髋外展肌控制骨盆的能力差有关; l 上楼困难的原因有膝屈曲不充分,足下垂,患侧负重能力差,屈髋使重心前移不充分等;l 下楼困难的原因有屈髋使膝过伸造成膝屈曲困难,重心前移不充分,胫骨前移控制不良,过度屈髋造成迈步相下肢的相对长度不够; l 跑步困难的原因有小腿后群肌在支撑相对踝的控制不良使踝跖屈维持困难,上肢协同摆动功能不良; l 患腿单腿跳困难的原因是小腿后群肌和足内附肌的瘫痪或爆发力差,拇屈肌无力,趾屈肌痉挛;
第1章运动仿真 本章重点 应力分析的一般步骤 边界条件的创建 查看分析结果 报告的生成和分析 本章典型效果图 1.1机构模块简介 在进行机械设计时,建立模型后设计者往往需要通过虚拟的手段,在电脑上模拟所设计的机构,来达到在虚拟的环境中模拟现实机构运动的目的。对于提高设计效率降低成本有很大的作用。Pro/ engineer 中“机构”模块是专门用来进行运动仿真和动态分析的模块。 PROE的运动仿真与动态分析功能集成在“机构”模块中,包括Mechanism design(机械设计)和Mechanism dynamics(机械动态)两个方面的分析功能。 使用“机械设计”分析功能相当于进行机械运动仿真,使用“机械设计”分析功能来创建某种机构,定
可以测量诸如位置、速度、加速度等运动特征,可以通过图形直观的显示这些测量量。也可创建轨迹曲线和运动包络,用物理方法描述运动。 使用“机械动态”分析功能可在机构上定义重力,力和力矩,弹簧,阻尼等等特征。可以设置机构的材料,密度等特征,使其更加接近现实中的结构,到达真实的模拟现实的目的。 如果单纯的研究机构的运动,而不涉及质量,重力等参数,只需要使用“机械设计”分析功能即可,即进行运动分析,如果还需要更进一步分析机构受重力,外界输入的力和力矩,阻尼等等的影响,则必须使用“机械设计”来进行静态分析,动态分析等等。 1.2总体界面及使用环境 在装配环境下定义机构的连接方式后,单击菜单栏菜单“应用程序”→“机构”,如图1-1所示。系统进入机构模块环境,呈现图1-2所示的机构模块主界面:菜单栏增加如图1-3所示的“机构”下拉菜单,模型树增加了如图1-4所示“机构”一项内容,窗口右边出现如图1-5所示的工具栏图标。下拉菜单的每一个选项与工具栏每一个图标相对应。用户既可以通过菜单选择进行相关操作。也可以直接点击快捷工具栏图标进行操作。 图1-1 由装配环境进入机构环境图
第三章摆动力学的可视化描述 VISUALIZATION OF THE PENDULUMˊS DYNAMICS 3-0 摆的数学描述和计算机仿真: 3-1对初始条件的敏感性: 3-2 摆的相图和蓬加莱截面: 3-4 时间序列和功率谱 3-5 吸引盆: 3-6分岔图(Bifurcation diagrams) 3-0摆的数学描述和计算机仿真: 在这一节我们将讨论下面4个问题: 1、驱动摆(driven pendulum)的运动方程: 2、产生混沌运动条件。 3、参数改变对驱动摆运动发生的影响。 4、一个有趣的问题。 1、驱动摆的运动方程: 摆的运动是一个十分古老的问题。物理学、数学都作了大量的研究,但它仍然是最具魅
力的研究课题。 首先我们写出驱动摆(driven pendulum ,也叫做“强迫振动摆”)的运动方程: //sin cos d dt q g ωωθφ=--+ /d dt θω= (3-1) /D d dt φω= 方程组(3-1)中有3个状态变量: θ—摆的角位移(angular displacement ); ω—摆的角速度(angular velocity ); φ—驱动力的相位角(drive phase angle )。 因此它的轨线在3维相空间描绘。 方程(3-1)中也有3个参数: q —阻尼系数(damping factor ); g —驱动力幅值(driving force amplitude ); D ω—驱动力角频率(angular drive
frequency)。 同时考虑3个参数来研究驱动摆的性态,也就是说,在3维相空间和3维参数空间内考察摆的形态,将是一个十分困难、实际上不可能完成的任务。 我们把ωD固定,选择少数几个q值,让g 值在一定的区间充分变化,以观察系统的性态。 (在Appendix B(Page 207, Listing 4)中有描述摆运动的计算机程序(Title: Motion),可供参考。) 2、产生混沌运动的条件: 产生混沌的必要条件有2条(See: Page 2): (1)系统至少要有3个独立的动力学变量;(2)系统至少要有1项包含了几个动力学变量的非线性项。
农村幼儿园乡土特色户外体育活动的组织与开展【摘要】户外体育活动是幼儿园体育活动的重要组织形式,作为一种非正规 性体育活动,在很大程度上弥补了体育课的不足。为了有效开展幼儿园的户外体育活动,我园针对农村独有的资源,尝试从创新活动内容,拓展活动场地;开发体育器材;优化组织形式四个方面有针对性的开展了研究,以实现提高农村幼儿园户外体育活动的质量。 关键词:农村乡土特色户外体育活动组织与开展《纲要》健康领域中指出:幼儿园要“开展丰富多彩的户外游戏和体育活动,培养幼儿参加体育活动的兴趣和习惯,增强体质,提高对环境的适应能力”。但是我们农村幼儿园由于受各方条件的限制,户外体育活动常常偏重有形的、使用运动器械的活动,形式上热热闹闹,而运动质量却不高。同时教师对体育活动的重要性和意义存在认识上的偏差,以至于幼儿园户外体育活动常常流于形式,或停留在计划上,而真正的实际活动时间和活动质量却得不到保证。为此我园探索开展户外体育活动的研究,以促进幼儿园户外体育活动有效开展。 一、户外体育活动内容的创新 1.活动内容生活化 幼儿期的儿童最喜欢模仿,对于大人或年长孩子所做的事,如工地里的建筑、田野里的耕种和收获等等,都想尝试一番。利用这些有利资源开展户外体育活动中,定能满足孩子的好奇心,丰富他们的经验。为此我们结合本地资源开展了一系列本土化的户外体育活动。如:结合主题活动《贝母之乡》,组织孩子去田里种贝母、浇水、采摘贝母花;结合幼儿园围墙的加高工作,开展《小小搬运工》活动,帮助建筑工人搬运砖头、瓦片。通过开展各种本土化的户外体育活动,激发幼儿的参与热情。 2.活动内容乡土化 在我们农村流传着许多具有本土特色的民间游戏,它不受时间、空间、条件的限制,能随时随地拈来就玩,不仅符合孩子好动、好学、好模仿、好游戏的心理特点,而且易学、易会、易传,对孩子的身心发展具有多方面的价值。这些都是我们开展游戏的宝贵教材。基于以上认识,我们尝试将古朴
设备一:Sportstec运动行为表现分析软件系统 一、仪器用途: 本系统靠其强大软件及数字式视频技术来采集运动团队和选手个人表现或学校教师学生的课堂视频等各类信息---其中还包括有关的比赛信息、教学信息、学生反馈信息等。这些数据既可以为运动比赛现场(如现场的战术分析)、学校课堂分析所用,也可供赛后参照所用,即借助于深入透切的视频监测和统计信息,对目标个人或整个团队的表现进行跟踪分析。本系统依靠其先进的技术能力将记录分析结果实时呈现于用户面前。使他们可及时了解相关信息并对其进行编辑和存档等多种操作。凭借着强大的系统功能和出色的存储能力,用户可轻松地对比赛信息进行实时分析并及时获得回馈。依照不同分析项目及个人,团队使用者得特殊要求,可对系统进行相应改进以更好发挥其强大功能。 二、技术指标和参数: ?可以现场进行录像实时标注分析和后期标注分析; ?结合场地图,便于对球类项目进行精确标记; ?战术板灵活简便,便于现场及赛后进行操作; ?能够进行数据统计,数据完整可靠; ?可以方便地进行录像片段查询、检索、回放; ?录像回放可以精确进行控制,可以实现慢放、停帧、回放、步进等功能; ?可以方便地进行视频片段组合、切换、合成、转换格式、刻录DVD功能; ?多国语言操作菜单; ?能应用于同场竞技性集体性球类项目、隔网对抗性球类项目、对抗性项目等 ?分析对手比赛战术及表现---发现对手弱点和不足 ?设计比赛战略战术,协助执行既定方针 ?发现,强化特定运动技能 ?监测比赛对手状态,发现对方漏洞,衡量对方压力 ?检验团队配合的有效性和灵活性 ?发展选手运动方式,合理安排时间计划 ?竞技速度比较及运动技术表现 ?运动视频设计制作 三.仪器配置: 3.1系统主机1台 3.2系统软件1套 3.3连接线 2 套 3.4转换线1套
复摆运动的初步分析及混沌现象 Ozprince 1.概述:复摆是指,在重力作用下绕通过自身某固定水平轴摆 动的刚体。即复摆是一刚体绕固定的水平轴在中立的作用下作微小的摆动的动力运动体系,又称物理摆。而在教学中通常只考虑其简谐振动即“微小摆动”的情形,内容比较单一,实际上,我们可以将其定义推广至任意角度汉周期驱动力与阻尼力矩的情形。 2.运动方程:对如图所示的物理白,其质量为m,对转轴o的 转动惯量为J,质心C到转轴的距离为h,如果复摆振动时受到的阻尼力矩是;周期性驱动力的力矩为,重力矩为,则复摆的运动方程可以写为: 经化简后方程可以表示为: 其中 3.相图法: 将指点的位置(或角位置)作为横坐标,将速度(或角速 度)作为纵坐标,所构成的直角坐标系平面,称为相平面。 所谓“相”是只某种运动状态,指点在某一时刻的运动状态
可用它在该时刻的位置和速度来描述。因此质点的一个运动状态,对应于相平面上的一个质点,称为相点。当质点的运动状态发生变化时,相点就在相平面内运动,相点的运动轨迹称为相迹或者相图。 4.复摆运动方程的解的讨论及运动过程模拟: i)无阻尼(a=0),无驱动(d=0)的情形,这时方程化为: ○1位移较小的情形: 当角位移<<1时,略去泰勒展开式中的高次项sin=,即: 其中b是由系统自身的性质决定的,上式的解为: (*) 这时我们常见的简谐振动的形式,式中的A为振幅。由(*)式可知它的相迹是椭圆,其大小取决于振幅A,频率b。 运动模拟方面我们可以采用Oringin等软件绘制图形。所有参数均取有意义的简单值,并不给出。 图1. ○2任意大小的角位移,方程近似为:
中国古代的体育活动 中国古代虽无“体育”一词,实际上却拥有绚丽多姿、丰富多彩的体育活动,是中国古代文明的重要组成部分。中国古代的体育活动独具民族特色,有多种多样的运动形式。它是各民族共同创造的,体现了多元的民族特色。 技巧――古代的体操 在中国古代体育活动中,有一类独特的运动形式,这就是技巧。中国古代的技巧运动,源于史前人类自身的活动和生产劳动实践,随着社会的发展和人类文化的进步,至秦汉之际,这一运动形式已经成为统一专制大帝国精神文化形态之一的“乐舞百戏”艺术的主要内容。这种技巧运动形式的主要项目有筋斗、倒立、柔术、戏车、戴竿、绳技等等,其中许多项目都需要高度的身体技巧。这些丰富的以展现身体的高度技巧为主的运动形式,经汉代以后,基本上确立了其在中国古代盛行的“百戏”艺术中的地位。 魏晋隋唐五代时期,有关技巧的身体运动项目,基本上是沿袭着汉代已经较为完备的形式,但在难度上、方式上都有一定程度的发展。宋元明清时期的技巧活动形式,从宫廷到宴乐,从城镇到乡间,广泛流行。尤其是城镇的演艺场所和乡村走会表演,都有着多种形式的身体技巧内容。此外,除了动作技巧有所发展外,在项目上也有变化。明人绘《明宪宗元宵行乐图》卷中,就有一部分是表现技巧内容的画面,其形式有登轮、钻圈、倒立旋人、柔术以及叠人等。作为一种发挥身体潜能的运动方式,技巧运动为中国古代体育增添了新的内容。 中国古代体育运动---竞技类 中国古代体育的竞技性比较弱,特别是唐代以后。射为六艺之一。“六艺”即“礼、乐、射、御、书、数”,是中国先秦时期的主要教育内容。其中“射”就是射箭,“御”就是驾车。
弓箭的产生成为狩猎和战争的锐利武器。射术的练习,是古人重要的体育活动。周代制定了“射礼”,射礼是指礼仪化的射箭比赛,是古代多种场合必然举行的活动项目,例如祭祀典礼、诸侯朝拜、外交会盟等场合。按等级排列为四种:大射、宾射、燕射、乡射,使射箭成为一种文化礼仪。 古代出了许多善射的武士,如先秦时的养由基、纪昌、逢蒙,汉代的飞将军李广,三国时期的曹操也能“手射飞鸟”。 由于射箭在古代军事活动中的重要作用,唐长安二年(公元702年),武则天开创选拔军事人材的武举制度,就对射术特别重视。直至清末,射术一直是军事武艺的主要项目。宋元以后,由于现代火器的发明和使用,射箭活动中的军事、礼仪等意义日渐削弱,其竞赛性和娱乐性却逐渐加强,但仍然属于武艺的重要内容,直至清末。 中国古代体育运动---武术 武术,是中华民族独具特色的一类体育运动,它是伴随着人类社会生活的进步而逐步发展起来的。 器械,是传统武术的基础,其最初是伴随着狩猎和战争的出现而发展起来的,后来的诸多武术器械,实际上就是源于古代的某些生产工具和兵器。商周时期出现的各类青铜武器,如戈、戟、矛、刀、剑等,可以说是较早的武术器械。秦汉以后,随着冶铁业的发展,铁制武术器械日益多样化。 拳术,是中华武术的重要组成部分,其特点主要是徒手的拳脚肢体的运用。魏晋隋唐之际,随着宗教的兴盛,武术中的拳术更流行于寺院教徒和民间之中,及至明清,随着中华武术内容的日渐丰富,其中的拳术套路技术渐趋成熟,主要表现在形成了具有不同风格及技术特色的多种流派。 除了徒手的拳脚肢体的运用,利用器械进行技艺演练,也是武术的重要组成部分。秦汉以后,受战争中适应近战决胜负之需
论文题目:多自由度非线性机械系统的全局分叉和混沌动力学研究 作者简介:姚明辉,女,1971年11月出生,2002年09月师从于北京工业大学张伟教授,于2006年06月获博士学位。 中文摘要 在机械系统中,有许多问题的数学模型和动力学方程都可用高维非线性系统来描述,对于高维非线性动力系统来说,其研究难度比低维非线性动力系统要大得多,不仅理论方法上有困难,几何描述和数值计算都有困难。目前研究高维非线性系统的全局分叉和混沌动力学的理论方法还不是很多,国际上处于发展阶段,国内尚处于起步阶段,因此发展处理高维非线性动力学系统的理论研究方法是非常重要和迫切的。在高维非线性动力学的全局分叉和混沌动力学问题中,除了单脉冲混沌运动外,还有多脉冲混沌运动,目前研究多脉冲混沌运动的解析方法主要有两种,即广义Melnikov方法和能量相位法。 本论文改进和推广了Kovacic、Haller和Wiggins等人提出的广义Melnikov方法和能量相位法,利用这两种全局摄动解析方法首次研究了非线性非平面运动悬臂梁、粘弹性传动带非平面运动和面内载荷和横向载荷联合作用下四边简支薄板的多脉冲轨道和Shilnikov型混沌运动。理论研究发现这些系统存在多脉冲混沌运动;利用数值方法模拟、验证了理论分析的结果。论文的研究内容及取得的创新性成果有以下几个方面。 (1) 综述了高维非线性系统的分叉和混沌动力学的国内外研究现状;简要介绍了Melnikov 方法的发展,高维Melnikov方法的应用,以及广义Melnikov方法的提出和建立;概括了能量相位法的国内外主要研究进展;介绍了研究高维非线性系统的全局分叉和混沌运动的其它方法。总结了能量相位法和广义Melnikov方法的研究进展、成果及存在的不足和有待深入研究的问题。 (2) 介绍了由Haller和Wiggins提出的能量相位法;以及由Kovacic等人提出的广义Melnikov方法。由于能量相位法和广义Melnikov方法提出和发展的时间较短,而且一直是独立的两种解析方法,在本论文中,首次详细地研究了两种全局摄动解析方法的区别和联系。 (3) Haller和Wiggins提出的能量相位法在计算能量差分函数时,所引入的变换改变了原来系统的拓扑结构。为了使原来系统的拓扑结构不发生变化,我们改进了能量相位法。利用改进的能量相位法,首次研究了非线性非平面运动悬臂梁、粘弹性传动带和四边简支薄板的全局分叉和混沌动力学,发现这些系统存在多脉冲混沌运动。 (4) 由于广义Melnikov方法在理解、计算和开折条件的证明上,存在很大的难度,因此,一直没有应用到实际工程中分析一些具体的模型。本文首次把广义Melnikov方法推广到实际工程中,利用广义Melnikov方法研究具有实际工程背景的三个高维非线性机械系统,从理论
附录四:中国古代体育运动项目图示 鉴于中国古代体育项目大多不为现代人所熟悉,为了更加形象地传达策划意图,以图示的方式表现20种中国古代体育项目的特征和情景,所选图示来自于各种真实历史资料和现代的仿古实践和民俗保留。 (一)养生体育项目 养生类中国古代体育运动建议进行以下项目。 1、导引/行气 主要采取表演赛的形式。导引是在形体的不断动态中进行呼吸运动和精神修炼的中国古代养生类体育运动,旨在协调和提高人体身心水平,促进人的健康长寿。行气又称气功,也是强调呼吸运动和精神修炼的中国古代养生类体育运动,区别是主要在形体的相对静态中进行。 导引图 图示说明:马王堆西汉墓出土彩色帛画,上绘形态各异的导引术势 44个。 行气图
图示说明:出自《中华医学文物图集》。 2、五禽戏/八段锦 主要采取表演赛、参与赛、普及赛的形式。“五禽戏”是华佗在导引术基础上创造了著名的养生类中国古代体育运动。“名五禽之戏,一曰虎,二曰鹿,三曰熊,四曰猿,五曰鸟”,五禽戏的最大特点,是将古代导引术加以简约化和套势化,使其结构完整,编排合理,简约精要,易学易练,有利于传播和习练。八段锦上承华佗“五禽戏”传统,以养生长寿为宗旨,将多种导引术势和动作编排成套路,并以口诀形式流传的一种著名中国古代健身套式体系。 五禽戏图 图示说明:出自人民体育出版社《体育史》。
八段锦图 图示说明:出自《活人心法》。 3、武术内功 主要采取表演赛的形式。武术内功是在传统导引术基础上,结合武术的特点与需要,以强身壮体,运气发力为目的,形成中国传统武术特有的身体素质和专项素质训练体系。以《易筋经》为代表。内功的形成经历了一个由道家养生治病的导引行气术向武术内功的发展过程。据有关史料,早在唐人所撰《剧谈录》一书中,就有道士身受“富有膂力,扛鼎挟舟”的武功高手重拳打击而“如扣木石”,“略不微动”的记载。 武术内功图
农村文化体育建设提升年活 动实施方案 为加快推进文化强县建设,积极构建现代公共文化服务体系,实现农村文化体育事业大发展大繁荣,经研究,开展20XX农村文 化体育建设提升年活动。现制定实施方案如下: 丰富农村群众精神文化生活、完善农村公共文化体育服务设施、提升文化队伍工作水平、健全农村文化体育工作机制为目标,通过农村文化体育建设提升年活动,进一步净化农村社会风气,促进农村文化体育事业快速健康发展,繁荣农民精神文化生活,促进我县城乡公共文化服务体系建设迈上新台阶。 (一)强化阵地建设 1.打造一批文化品牌镇。按照“一镇一品”的要求,各镇(街道)立足当地特色文化资源,围绕促进产业经济发展和繁荣农村群众文化,深入挖掘提炼培育区域文化品牌,打造一批文化品牌镇(街道)。各地要围绕提升区域文化品牌内涵,认真制订工作方案,设计工作载体,细化工作内容,抓出亮点特色。要围绕打响文化品牌,通过举办活动赛事和设计文化标识标牌,进行广泛宣传推广,营造浓厚文化氛围。 2.创建一批文化__村。突出典型示范,选择一批各方面条件比较成熟的行政村,集中部门和镇街资源力量,培育打造文化__村。
__村要达到“十个一”标准,即要有一所文化礼堂、一个百姓舞台、一片门球场、一个灯光篮球场、一个室内电影放映点、一个文化广场、一家农家书屋、一支农民文艺队伍、一首村歌和一片文化墙。 3.评选一批文化特色村。立足各地实际,在现有工作基础上,排摸出一批群众文化活动活跃、具有较好文化特色的行政村。通过梳理文字、图片、影视等资料,进一步提炼特色村文化内涵。在此基础上,县里将组织举办十大文化特色村评选活动,集中进行宣传展示,丰富全县文化建设内容内涵,促进农村文化繁荣发展。 4.新建一批农村文化礼堂。发挥农村文化礼堂在提升农民素质、打造“精神家园”、繁荣城乡文化、促进社会和谐中的重要作用,坚持结合实际、彰显特色,挖掘当地自然资源和历史文化资源,将地域特色文化、传统民俗文化与现代文明进行有机融合,做到破立结合、继承发展,形成独具特色的文化礼堂品牌。 5.完善一批文体活动设施。以结构合理、发展均衡、网络健全、运行有效、惠及全民的公共文化服务体系为目标,加大文化体育基础设施建设力度,进一步完善覆盖城乡的县、镇(街道)、社区(村)三级公共文化服务设施网络。20XX年,要完成县公共文化活动中心、县体育馆和游泳馆建设,开工建设县职工文化活动中心,进一步完善社区文化中心、图书分馆等公共文化服务场所,提升城乡公共文化服务水平。 (二)创新队伍培养