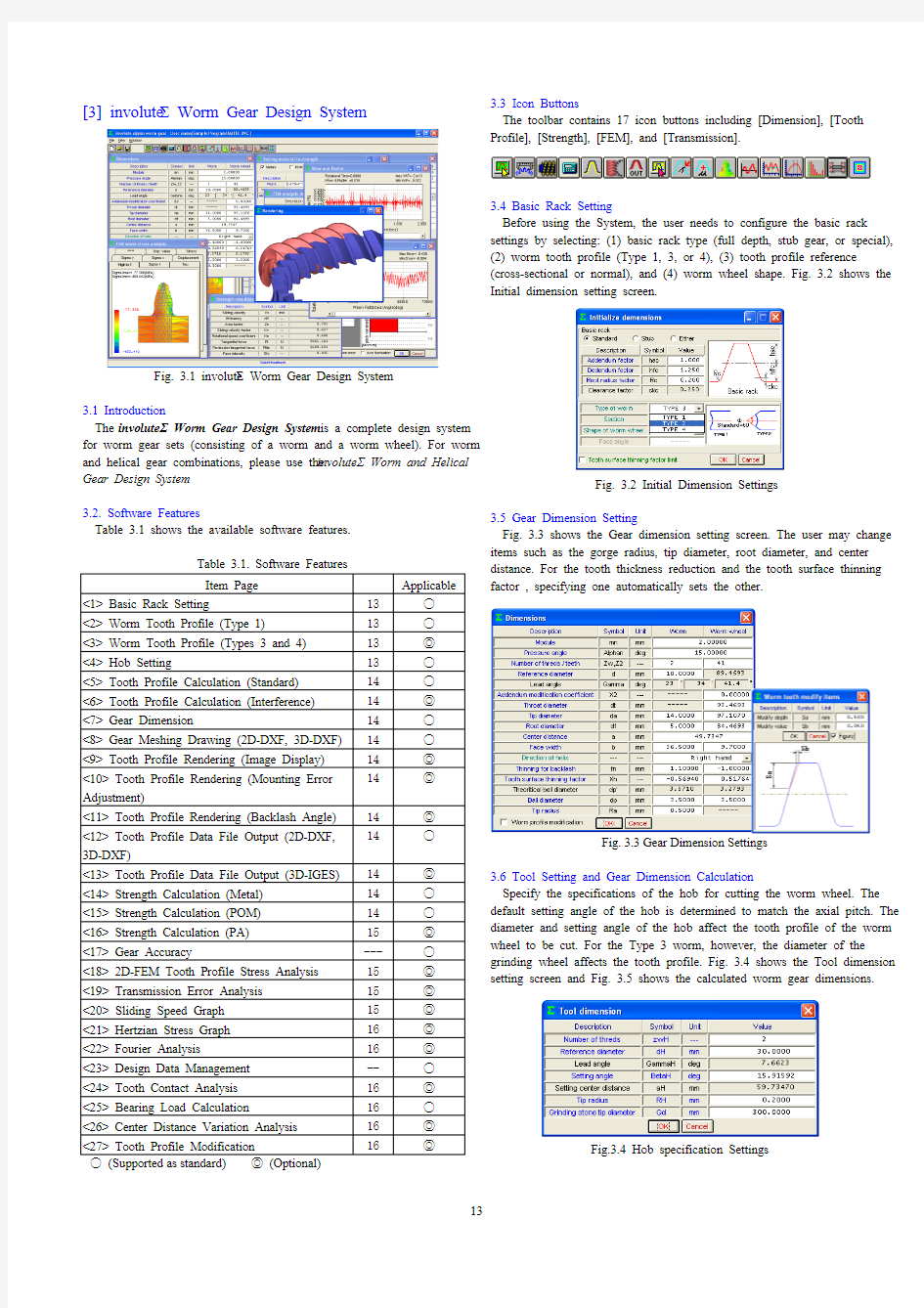
[3] involute Σ Worm Gear Design System
Fig. 3.1 involute Σ Worm Gear Design System
3.1 Introduction
The involute Σ Worm Gear Design System is a complete design system for worm gear sets (consisting of a worm and a worm wheel). For worm and helical gear combinations, please use the involute Σ Worm and Helical Gear Design System .
3.2. Software Features
Table 3.1 shows the available software features.
Table 3.1. Software Features
Item Page Applicable
<1> Basic Rack Setting
13 ○
<2> Worm Tooth Profile (Type 1) 13 ○
<3> Worm Tooth Profile (Types 3 and 4) 13 ◎ <4> Hob Setting
13 ○ <5> Tooth Profile Calculation (Standard) 14 ○ <6> Tooth Profile Calculation (Interference)
14 ◎ <7> Gear Dimension
14 ○ <8> Gear Meshing Drawing (2D-DXF, 3D-DXF) 14 ○
<9> Tooth Profile Rendering (Image Display) 14
◎ <10> Tooth Profile Rendering (Mounting Error Adjustment)
14
◎
<11> Tooth Profile Rendering (Backlash Angle) 14
◎ <12> Tooth Profile Data File Output (2D-DXF, 3D-DXF)
14
○
<13> Tooth Profile Data File Output (3D-IGES) 14 ◎ <14> Strength Calculation (Metal) 14 ○ <15> Strength Calculation (POM) 14 ○ <16> Strength Calculation (PA) 15 ◎ <17> Gear Accuracy
--- ○ <18> 2D-FEM Tooth Profile Stress Analysis 15 ◎ <19> Transmission Error Analysis 15 ◎ <20> Sliding Speed Graph 15 ◎ <21> Hertzian Stress Graph 16 ◎ <22> Fourier Analysis 16 ◎ <23> Design Data Management -- ○ <24> Tooth Contact Analysis 16 ◎ <25> Bearing Load Calculation 16 ○ <26> Center Distance Variation Analysis 16 ◎ <27> Tooth Profile Modification 16
◎
○ (Supported as standard) ◎ (Optional)
3.3 Icon Buttons
The toolbar contains 17 icon buttons including [Dimension], [Tooth Profile], [Strength], [FEM], and [Transmission].
3.4 Basic Rack Setting
Before using the System, the user needs to configure the basic rack settings by selecting: (1) basic rack type (full depth, stub gear, or special), (2) worm tooth profile (Type 1, 3, or 4), (3) tooth profile reference (cross-sectional or normal), and (4) worm wheel shape. Fig. 3.2 shows the Initial dimension setting screen.
Fig. 3.2 Initial Dimension Settings
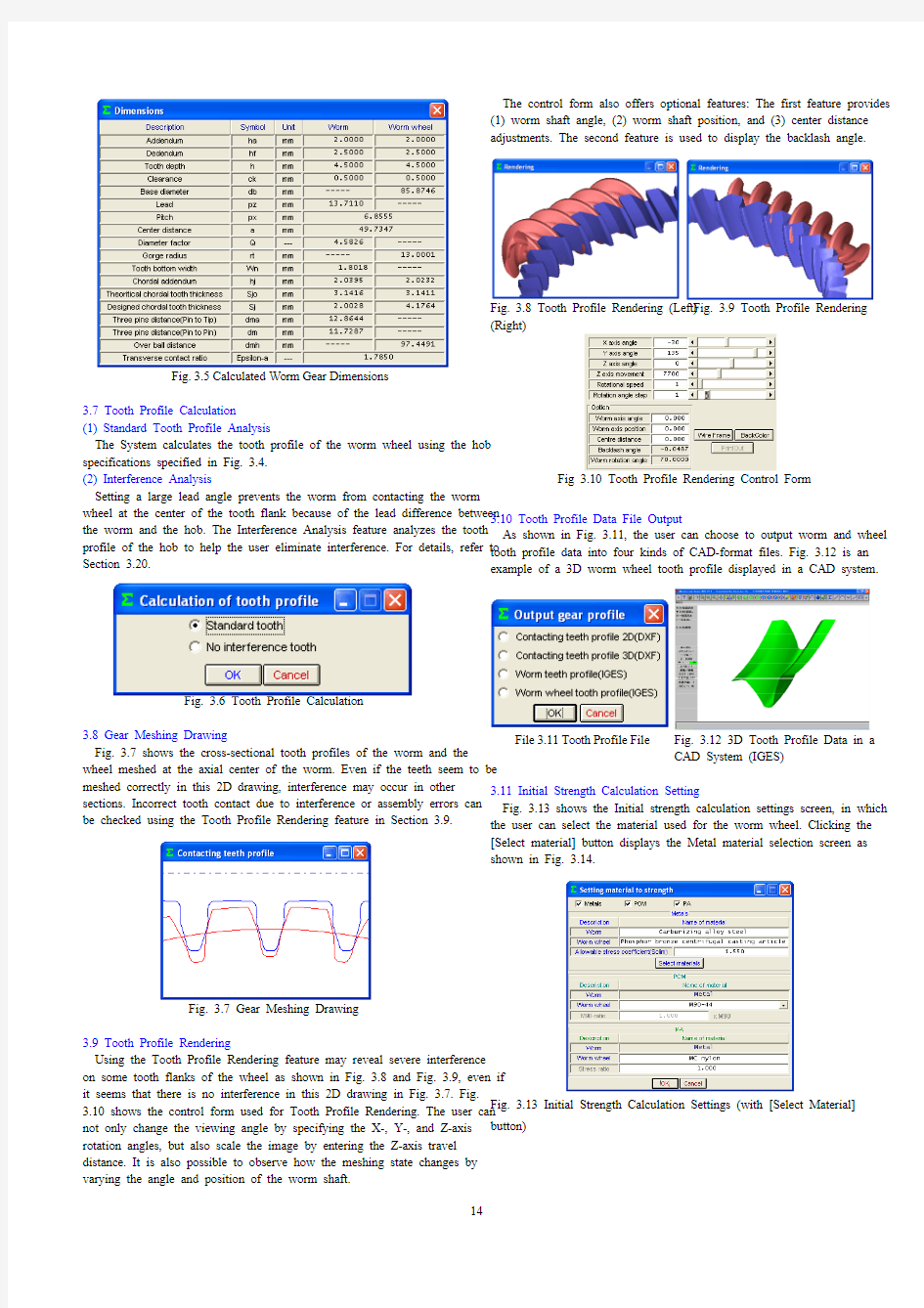
3.5 Gear Dimension Setting
Fig. 3.3 shows the Gear dimension setting screen. The user may change items such as the gorge radius, tip diameter, root diameter, and center distance. For the tooth thickness reduction and the tooth surface thinning factor , specifying one automatically sets the other.
Fig. 3.3 Gear Dimension Settings
3.6 Tool Setting and Gear Dimension Calculation
Specify the specifications of the hob for cutting the worm wheel. The default setting angle of the hob is determined to match the axial pitch. The diameter and setting angle of the hob affect the tooth profile of the worm wheel to be cut. For the Type 3 worm, however, the diameter of the grinding wheel affects the tooth profile. Fig. 3.4 shows the Tool dimension setting screen and Fig. 3.5 shows the calculated worm gear dimensions.
Fig.3.4 Hob specification Settings
Fig. 3.5 Calculated Worm Gear Dimensions
3.7 Tooth Profile Calculation
(1) Standard Tooth Profile Analysis
The System calculates the tooth profile of the worm wheel using the hob specifications specified in Fig. 3.4. (2) Interference Analysis
Setting a large lead angle prevents the worm from contacting the worm wheel at the center of the tooth flank because of the lead difference between the worm and the hob. The Interference Analysis feature analyzes the tooth profile of the hob to help the user eliminate interference. For details, refer to Section 3.20.
Fig. 3.6 Tooth Profile Calculation
3.8 Gear Meshing Drawing
Fig. 3.7 shows the cross-sectional tooth profiles of the worm and the wheel meshed at the axial center of the worm. Even if the teeth seem to be meshed correctly in this 2D drawing, interference may occur in other sections. Incorrect tooth contact due to interference or assembly errors can be checked using the Tooth Profile Rendering feature in Section 3.9.
Fig. 3.7 Gear Meshing Drawing
3.9 Tooth Profile Rendering
Using the Tooth Profile Rendering feature may reveal severe interference on some tooth flanks of the wheel as shown in Fig. 3.8 and Fig. 3.9, even if it seems that there is no interference in this 2D drawing in Fig. 3.7. Fig. 3.10 shows the control form used for Tooth Profile Rendering. The user can not only change the viewing angle by specifying the X-, Y-, and Z-axis rotation angles, but also scale the image by entering the Z-axis travel distance. It is also possible to observe how the meshing state changes by varying the angle and position of the worm shaft.
The control form also offers optional features: The first feature provides (1) worm shaft angle, (2) worm shaft position, and (3) center distance
adjustments. The second feature is used to display the backlash angle.
Fig. 3.8 Tooth Profile Rendering (Left) Fig. 3.9 Tooth Profile Rendering (Right)
Fig 3.10 Tooth Profile Rendering Control Form
3.10 Tooth Profile Data File Output
As shown in Fig. 3.11, the user can choose to output worm and wheel tooth profile data into four kinds of CAD-format files. Fig. 3.12 is an example of a 3D worm wheel tooth profile displayed in a CAD system.
File 3.11 Tooth Profile File Fig. 3.12 3D Tooth Profile Data in a CAD System (IGES)
3.11 Initial Strength Calculation Setting
Fig. 3.13 shows the Initial strength calculation settings screen, in which the user can select the material used for the worm wheel. Clicking the [Select material] button displays the Metal material selection screen as
shown in Fig. 3.14.
Fig. 3.13 Initial Strength Calculation Settings (with [Select Material] button)
Fig. 3.14 Metal Material Selection
3.12 Strength Calculation
Fig. 3.15 shows the strength setting screen for resin (PA) materials. The results of the strength calculation for the resin and metal materials are shown in Fig. 3.16 and Fig. 3.17, respectively.
Fig. 3.16 Strength Calculation Result for Resin Material (PA)
Fig. 3.17 Strength Calculation Result for Metal Material
3.13 FEM Tooth Profile Stress Analysis
Stress analysis can be easily performed by simply clicking the [FEM] button after strength calculation. Fig. 3.18 shows the FEM analysis setting screen. The user may change the Young modulus, Poisson ratio, number of partitions, and load values. Fig. 3.19 and Fig. 3.20 show the results of FEM analysis on the worm and the wheel, respectively.
Fig. 3.18 FEM Analysis Settings
Fig. 3.15 Strength Specification Settings for Resin Material (PA)
Fig. 3.19 FEM Analysis on Worm Fig. 3.20 FEM Analysis on Wheel (Stress=ó1) (Stress=ó1)
3.14 Transmission Error Analysis
Fig. 3.21 and Fig. 3.22 show the setting screens for transmission error analysis. The graphs in Fig. 3.23 and Fig. 3.24 show the results of analysis on the rotation transmission error and wow and flatter, respectively. These errors were raised by assembling the worm and wheel pair to have pitch and radial runout errors and rotating the worm by one turn. The graphs in Fig. 3.25 and Fig. 3.26 also show the results of analysis on the rotation transmission error and wow and flatter, respectively, but they were raised by rotating the wheel by one turn.
Fig. 3.21 Transmission Error Analysis Fig. 3.22 Transmission Error Settings (Worm) Analysis Settings (Wheel)
Fig. 3.23 Rotation Transmission Fig. 3.24 Wow & Flatter 1 Error 1
Fig. 3.25 Rotation Transmission Fig. 3.26 Wow & Flatter 2 Error 2
3.15 Frequency Analysis
Fig. 3.27 shows the result of analysis on the frequency measured when the worm is rotated by one turn; Fig. 3.28 shows the result of analysis on the frequency measured when the wheel is rotated by one turn.
Fig. 3.27 Fourier Analysis 1 Fig. 3.28 Fourier Analysis 2
3.16 Hertzian Stress and Sliding Speed Graphs
Fig. 3.29 shows the Hertzian stress exerted on the tooth flank surface when the worm is rotated by one turn; the graph in Fig. 3.30 shows the sliding speed measured during that time.
These graphs are useful after the transmission error analysis.
Fig. 3.29 Hertzian Stress Graph Fig. 3.30 Sliding Speed Graph
3.17 Center Distance Variation
This feature simulates how the center distance changes when, like on a double-flank gear rolling tester, the worm and the wheel rotate while mutually pressing each other's tooth flanks. The results of this simulation are shown in Fig. 3.31 (circle graph) and Fig. 3.32 (line graph), respectively.
Fig. 3.31 Center Distance Variation Fig. 3.32 Center Distance Variation Graph 1 Graph 2
3.18 Bearing Load Calculation
Fig. 3.33 shows the bearing load setting screen; Fig. 3.34 shows the result of the bearing load calculation.
Fig. 3.33 Bearing Load Calculation Fig. 3.34 Bearing Load Settings Calculation Result
3.19 Tooth Contact Analysis
An example of analysis on the tooth flanks of the worm and worm wheel is shown below. The setting screen in Fig. 3.35 provides various settings for tooth contact analysis. In this example, analysis will be made on the tooth contact of the worm and wheel specified in Fig. 3.3. Here, the number of rotation position partitions is set to "4" although it accepts values in a range of 3 to 20. Fig. 3.36 shows a tooth contact state between the worm and the wheel and Figs. 3.37 to 3.40 show their tooth contact states by 1/4 pitch. This example, however, does not take the deflection of the teeth and the pitch error into account.
It is noticeable that tooth contact pattern in Fig. 3.36 slightly differs from the tooth profile rendering image shown in Fig. 3.8. The reason for this is that the analysis in this example was made at a fineness that is two times (up to five times allowed) greater than that of the number of tooth profile
partitions setting used for the tooth profile rendering image of the wheel.
Fig. 3.35 Tooth Contact Analysis Settings
Fig. 3.36 Tooth Contact State (Worm and Wheel)
Fig. 3.37 Tooth Contact State 1 Fig. 3.38 Tooth Contact State 2
Fig. 3.39 Tooth Contact State 3 Fig. 3.40 Tooth Contact State 4
In addition to viewing the tooth contact state as a color pattern as shown in Fig. 3.36, to examine it in more detail, the user may click the [Tooth contact value] button in Fig. 3.35 to display the contact clearance values in Fig. 3.41. The slider control bar at the bottom of the screen can be used to change the target rotation position (1 to 4 in this example).
Fig. 3.41 Contact Clearance Values
3.20 Example of Hob Tooth Profile Analysis Simulation 1)3.20.1 Introduction
The tooth contact state between the worm and the worm wheel in mesh will be influenced by the hob used to cut them. The contact point will be deviated to a great extent particularly if the lead angle of the worm is large or if there is a significant difference between the diameters of the worm and the hob. Since this is caused by the lead difference between the worm and the hob, to obtain a proper tooth contact, it is necessary to modify the tooth profile of the hob. The following is the result of examination on the tooth contact and backlash of the worm gear using the involute Σ Worm Gear Design System .
3.20.2 Examined Gear Set
The specifications of the examined gear set are shown in Table 3.2. Compared with the worm's pitch diameter of 12 mm, the pitch diameter of the hob used to cut the worm wheel (shown in Fig. 3.42) is 36 mm. This requires the hob to be installed at a setting angle of 14.5916 (degrees) to match the axial pitch.
Fig. 3.42 Hob Dimensions
Table 3.2 Worm Gear Specifications
3.20.3 Tooth Profile Rendering
Fig. 3.43 and Fig. 3.44 show the tooth profile rendering images of the Type 1 worm and worm wheel. It can be seen that, while there are three occurrences of major interference on the worm and wheel cut using the non-modified hob, the modified hob has no interference and the worm and wheel mesh without interference around the center of the tooth flank.
Fig. 3.43 Tooth Profile Rendering Fig. 3.44 Tooth Profile Rendering (Non-Modified Hob) (Modified Hob)
3.20.4 Relationship between Hob Diameter and Backlash
Fig. 3.45 shows the change in the backlash amount when the diameter of the non-modified hob is increased from 12 to 100 mm. The graph shows that the backlash becomes the maximum at a hob diameter of 18 mm and decreases as the hob diameter increases. With the modified hob (shown in Fig. 3.47), the amount of change in backlash improves significantly and the backlash becomes approximately constant as shown in Fig. 3.26.
Fig. 3.45 Hob Diameter versus Fig. 3.46 Hob Diameter versus Backlash Graph 1 Backlash Graph 2
Fig. 3.47 Tooth Profile of Modified Hob
1) MPT2001-Fukuoka, Excerpt from Amtec Catalog, 2001
目录 第一章总论......................................................... - 2 - 一、机械设计课程设计的容......................................... - 2 - 二、设计任务..................................................... - 2 - 三、设计要求..................................................... - 3 - 第二章机械传动装置总体设计......................................... - 3 - 一、电动机的选择................................................. - 4 - 二、传动比及其分配............................................... - 4 - 三、校核转速..................................................... - 5 - 四、传动装置各参数的计算......................................... - 5 - 第三章传动零件—蜗杆蜗轮传动的设计计算............................. - 5 - 一、蜗轮蜗杆材料及类型选择....................................... - 6 - 二、设计计算..................................................... - 6 - 第四章轴的结构设计及计算.......................................... - 10 - 一、安装蜗轮的轴设计计算........................................ - 10 - 二、蜗杆轴设计计算.............................................. - 15 - 第五章滚动轴承计算................................................ - 17 - 一、安装蜗轮的轴的轴承计算...................................... - 18 - 二、蜗杆轴轴承的校核............................................ - 18 - 第六章键的选择计算................................................ - 19 - 第七章联轴器...................................................... - 20 - 第八章润滑及密封说明.............................................. - 20 - 第九章拆装和调整的说明............................................ - 20 - 第十章减速箱体的附件说明.......................................... - 20 - 课程设计小结........................................................ - 21 - 参考文献............................................................ - 22 -
蜗轮蜗杆传动 蜗杆传动是用来传递空间交错轴之间的运动和动力的。最常用的是轴交角∑=90°的减速传动。蜗杆传动能得到很大的单级传动比,在传递动力时,传动比一般为5~80,常用15~50;在分度机构中传动比可达300,若只传递运动,传动比可达1000。蜗轮蜗杆传动工作平稳无噪音。蜗杆反行程能自锁。 重点学习内容 本章中阿基米德蜗杆传动的失效形式、设计参数、受力分析、材料选择、强度计算、传动效率等为重点学习内容。对热平衡计算、润滑方法、蜗杆蜗轮结构等也应 一、蜗杆传动的类型 与上述各类蜗杆配对的蜗轮齿廓,完全随蜗杆的齿廓而异。蜗轮一般是在滚齿机上用滚刀或飞刀加工的。为了保证蜗杆和蜗轮能正确啮合,切削蜗轮的滚刀齿廓,应与蜗杆的齿廓一致;深切时的中心距,也应与蜗杆传动的中心距相同。 圆柱蜗杆传动 1、通圆柱蜗杆传动 (1)阿基米德蜗杆 这种蜗杆,在垂直于蜗杆轴线的平面(即端面)上,齿廓为阿基米德螺旋线,在包含轴线的平面上的齿廓(即轴向齿廓)为直线,其齿形角α0=20°。它可在车床上用直线刀刃的单刀(当导程角γ≤3°时)或双刀(当γ>3°时)车削加工。安装刀具时,切削刃的顶面必须通过蜗杆的轴线。这种蜗杆磨削困难,当导程角较大时加工不便。
(2)渐开线蜗杆 渐开线蜗杆(ZI蜗杆)蜗杆齿面为渐开螺旋面,端面齿廓为渐开线。加工时,车刀刀刃平面与基圆相切。可以磨削,易保证加工精度。一般用于蜗杆头数较多,转速较高和较精密的传动。
(3)法向直廓蜗杆 这种蜗杆的端面齿廓为延伸渐开线,法面(N-N)齿廓为直线。ZN蜗杆也是用直线刀刃的单刀或双刀在车床上车削加工。车削时车刀刀刃平面置于螺旋线的法面上,加工简单,可用砂轮磨削,常用于多头精密蜗杆传动。 (4)锥面包络蜗杆 这是一种非线性螺旋曲面蜗杆。它不能在车床上加工,只能在铣床上铣制并在磨床上磨削。加工时,盘状铣刀或砂轮放置在蜗杆齿槽的法向面内,除工件作螺旋运动外,刀具同时绕其自身的轴线作回转运动。这时,铣刀(或砂轮)回转曲面的包络面即为蜗杆的螺旋齿面,在I-I及N-N截面上的齿廓均为曲线。这种蜗杆便于磨削,蜗杆的精度较高,应用日渐广泛。
例:蜗杆传动,已知模数m=4.蜗杆头数z1=1,蜗轮齿数z2=50,特性系数q=10。求传动中心距a=?变位系数0时: 中心距a=(蜗杆分度圆+蜗轮分度圆)/2=(特性系数q*模数m+蜗轮齿数Z2*模数m)/2=(10*4+50*4)/2=120 特性系数:蜗杆的分度圆直径与模数的比值称为蜗杆特性系数。 加工蜗轮时,因为是直径和形状与蜗杆相同的滚刀来切制,由上式可看出,在同一模数下由于Z1和λ0的变化,将有很多不同的蜗杆直径,也就是说需要配备很多加工蜗轮的滚刀。为了减少滚刀的数目,便于刀具标准化,不但要规定标准模数,同时还必须规定对应于一定模数的Z1/tgλ0值,这个值用q表示,称之为蜗杆特性系数。 圆柱蜗轮、蜗杆设计参数选择 蜗轮和蜗杆通常用于垂直交叉的两轴之间的传动(图1)。蜗轮和蜗杆的齿向是螺旋形的,蜗轮的轮齿顶面常制成环面。在蜗轮蜗杆传动中,蜗杆是主动件,蜗轮是从动件。蜗杆轴向剖面类是梯形螺纹的轴向剖面,有单头和多头之分。若为单头,则蜗杆转一圈蜗轮只转一个齿,因此可以得到较高速比。计算速比(i)的公式如下: i=蜗杆转速n1 蜗轮转速n2 = 蜗轮齿数z2蜗杆头数z1 1、蜗轮蜗杆主要参数与尺寸计算 主要参数有:模数(m)、蜗杆分度圆直径(d1)、导程角(r)、中心距(a)、蜗杆头数(或线数z1)、蜗轮齿数(z2)等,根据上述参数可决定蜗杆与蜗轮的基本尺寸,其中z1、z2由传动要求选定。 (1)模数m 为设计和加工方便,规定以蜗杆轴项目数mx和蜗轮的断面模数mt为标准模数。对啮合的蜗轮蜗杆,其模数应相等,及标准模数m=mx=mt。
标准模数可有表A查的,需要注意的是,蜗轮蜗杆的标准模数值与齿轮的标准模数值并不相同。 表A
常见普通蜗轮蜗杆的规格及尺寸 例:蜗杆传动,已知模数m=4.蜗杆头数z1=1,蜗轮齿数z2=50,特性系数q=10。求传动中心距a=? 变位系数0时: 中心距a=(蜗杆分度圆+蜗轮分度圆)/2=(特性系数q*模数m+蜗轮齿数Z2*模数m)/2=(10*4+50*4)/2=120 特性系数:蜗杆的分度圆直径与模数的比值称为蜗杆特性系数。 加工蜗轮时,因为是直径和形状与蜗杆相同的滚刀来切制,由上式可看出,在同一模数下由于Z1和λ0的变化,将有很多不同的蜗杆直径,也就是说需要配备很多加工蜗轮的滚刀。为了减少滚刀的数目,便于刀具标准化,不但要规定标准模数,同时还必须规定对应于一定模数的Z1/tgλ0值,这个值用q表示,称之为蜗杆特性系数。
圆柱蜗轮、蜗杆设计参数选择 蜗轮和蜗杆通常用于垂直交叉的两轴之间的传动(图1)。蜗轮和蜗杆的齿向是螺旋形的,蜗轮的轮齿顶面常制成环面。在蜗轮蜗杆传动中,蜗杆是主动件,蜗轮是从动件。蜗杆轴向剖面类是梯形螺纹的轴向剖面,有单头和多头之分。若为单头,则蜗杆转一圈蜗轮只转一个齿,因此可以得到较高速比。计算速比(i)的公式如下: i=蜗杆转速n1 蜗轮转速n2 = 蜗轮齿数z2蜗杆头数z1 1、蜗轮蜗杆主要参数与尺寸计算 主要参数有:模数(m)、蜗杆分度圆直径(d1)、导程角(r)、中心距(a)、蜗杆头数(或线数z1)、蜗轮齿数(z2)等,根据上述参数可决定蜗杆与蜗轮的基本尺寸,其中z1、z2由传动要求选定。 (1)模数m 为设计和加工方便,规定以蜗杆轴项目数mx和蜗轮的断面模数mt为标准模数。对啮合的蜗轮蜗杆,其模数应相等,及标准模数m=mx=mt。 标准模数可有表A查的,需要注意的是,蜗轮蜗杆的标准模数值与齿轮的标准模数值并不相同。 表A
圆柱蜗轮、蜗杆设计参数选择 蜗轮和蜗杆通常用于垂直交叉的两轴之间的传动(图1)。蜗轮和蜗杆的齿向是螺旋形的,蜗轮的轮齿顶面常制成环面。在蜗轮蜗杆传动中,蜗杆是主动件,蜗轮是从动件。蜗杆轴向剖面类是梯形螺纹的轴向剖面,有单头和多头之分。若为单头,则蜗杆转一圈蜗轮只转一个齿,因此可以得到较高速比。计算速比(i)的公式如下: i=蜗杆转速n1 蜗轮转速n2 = 蜗轮齿数z2 蜗杆头数z1 1、蜗轮蜗杆主要参数与尺寸计算 主要参数有:模数(m)、蜗杆分度圆直径(d1)、导程角(r)、中心距(a)、蜗杆头数(或线数z1)、蜗轮齿数(z2)等,根据上述参数可决定蜗杆与蜗轮的基本尺寸,其中z1、z2由传动要求选定。 (1)模数m 为设计和加工方便,规定以蜗杆轴项目数mx和蜗轮的断面模数mt 为标准模数。对啮合的蜗轮蜗杆,其模数应相等,及标准模数m=mx=mt。 标准模数可有表A查的,需要注意的是,蜗轮蜗杆的标准模数值与齿轮的标准模数值并不相同。 表A
图1 图2 (2)蜗杆分度圆直径d1 再制造蜗轮时,最理想的是用尺寸、形状与蜗杆完全相同的蜗轮滚刀来进行切削加工。但由于同一模数蜗杆,其直径可以各不相同,这就要求每一种模数对应有相当数量直径不同的滚刀,才能满足蜗轮加工需求。为了减少蜗轮滚刀数目,在规定标准模数的同时,对蜗杆分度圆直径亦实行了标准化,且与m 有一定的匹配。蜗杆分度圆直径d1与轴向模数mx之比为一标准值,称蜗杆的直径系数。即
q= 蜗杆分度圆直径 模数 = d1 m d1=mq 有关标准模数m与标准分度圆直径d1的搭配值及对应的蜗杆直径系数参照表A (3)蜗杆导程角r 当蜗杆的q和z1选定后,在蜗杆圆柱上的导程角即被确定。为导程角、导程和分度圆直径的关系。 tan r= 导程 分度圆周长 = 蜗杆头数x轴向齿距 分度圆周长 = z1px d1π = z1πm πm q = z1 q 相互啮合的蜗轮蜗杆,其导程角的大小与方向应相同。 (4)中心距a 蜗轮与蜗杆两轴中心距a与模数m、蜗杆直径系数q以及蜗轮齿数z2间的关系式如下: a=d1+d2 2 = m q (q+z2) 蜗杆各部尺寸如表B 蜗轮各部尺寸如表C 2、蜗轮蜗杆的画法 (1) 蜗杆的规定画法参照图1图2 (2)蜗轮的规定画法参照图1图2 (3)蜗轮蜗杆啮合画法参照图1图 2.
蜗轮蜗杆设计 摘要 蜗杆传动从属齿轮传动,在现代工业中应用非常广泛。蜗轮蜗杆包含两个部分:蜗杆和蜗轮,其齿形大多数由直线、平面或者平面上的曲线经过一次或两次展成运动形成。由于蜗轮蜗杆结构性特点,它用于传递空间两相错轴间的运动和动力。蜗杆传动机构多数情况下蜗杆为主动件,蜗轮为被动件。蜗杆传动具有传动比大、体积小、运转平稳、噪音小等特点。在机床制造业中,普通圆柱蜗杆传动的应用尤为普遍,并且几乎成了一般低速传动工作台和连续分度机构的唯一传动形式;冶金工业轧机压下机构都采用大型蜗杆传动;煤矿设备中的各种类型的绞车及采煤机组牵引传动;起重运输业中各种提升 设备及无轨电车等都采用蜗杆传动。其他,在精密仪器设备、军工、宇宙观测仪器中,蜗杆传动常用作分度机构、操纵机构、计算机构、测距机构等等,大型天文望远镜、雷达等也离不开蜗杆传动。 关键词:蜗轮蜗杆
目录 第一章蜗杆传动的类型和特点 (1) 1.1 蜗杆传动的类型 (1) 1.2 蜗杆传动的特点 (2) 第二章蜗轮传动的基本参数和几何尺寸计算 (3) 2.1 蜗杆传动的基本参数 (3) 2.2 蜗杆传动的几何尺寸计算 (6) 第三章蜗轮传动的失效形式、设计准则、材料和结构 (7) 3.1 蜗杆传动的失效形式和设计准则 (7) 3.2 蜗杆、蜗轮的材料和结构 (8) 第四章蜗轮传动的强度计算 (10) 4.1蜗杆传动的受力分析 (10) 4.2 蜗轮齿面接触疲劳强度计算 (11) 4.3 蜗轮轮齿的齿根弯曲疲劳强度计算 (12) 第五章蜗轮传动的效率、润滑和热平衡计算 (13) 5.1蜗杆传动的效率 (13) 5.2 蜗杆传动的润滑 (13) 5.3 蜗杆传动的热平衡计算 (15) 结论 (17) 致谢 (18) 参考文献 (19)
了解蜗杆传动的特点,它的适用场合。了解蜗杆传动的主要参数,如模数、压力角、螺旋头数、螺旋导程角、螺旋螺旋角、螺旋分度圆等。 ?熟悉蜗杆、蜗轮构造,蜗杆与蜗轮常用什么材料制造,那个易被损害。 ?掌握蜗杆传动效率低的机理,蜗杆传动中箱体内的润滑油温度过高有什么危害,如何降低。 第一节概述 蜗杆传动是由蜗杆和蜗轮组成的(图3-52),用于传递交错轴之间的运动和动力,通常两轴交错角为90°。在一般蜗杆传动中,都是以蜗杆为主动件。 从外形上看,蜗杆类似螺栓,蜗轮则很象斜齿圆柱齿轮。工作时,蜗轮轮齿沿着蜗杆的螺旋面作滑动和滚动。为了改善轮齿的接触情况,将蜗轮沿齿宽方向做成圆弧形,使之将蜗杆部分包住。这样蜗杆蜗轮啮合时是线接触,而不是点接触。 蜗杆传动具有以下特点: 1.传动比大,且准确。通常称蜗杆的螺旋线数为螺杆的头数,若蜗杆头数为z 1,蜗轮齿数为z2,则蜗杆传动的传动比为 2=n1/n2=z2/z1ω1/ωi=(3-60) 通常蜗杆头数很少(z1=1~4),蜗轮齿数很多(z2=30~80),所以蜗杆传动可获得很大的传动比而使机构比较紧凑。单级蜗杆传动的传动比i≤100~300;传递动力时常用i=5~83。 2.传动平稳、无噪声。因蜗杆与蜗轮齿的啮合是连续的,同时啮合的齿对较多。03.当蜗杆的螺旋升角小于啮合面的当量摩擦角时,可以实现自锁。 =0.4~0.45。η=0.82~0.92。具有自锁时,η=0.75~0.82;z1=3~4时,η=0.7~0.75;z1=2时,η4.传动效率比较低。当z1=1时,效率 5.因啮合处有较大的滑动速度,会产生较严重的摩擦磨损,引起发热,使润滑情况恶化,所以蜗轮一般常用青铜等贵重金属制造。 由于普通蜗杆传动效率较低,所以一般只适用于传递功率值在50~60kW以下的场合。一些高效率的新型蜗杆传动所传递的功率可达500kW,圆周速度可达50 m/s。 第二节蜗杆传动的主要参数和几何尺寸 本节只讨论普通圆柱蜗杆传动,或称阿基米德圆柱蜗杆传动(在垂直于蜗杆轴线的剖面中,齿廓线是一条阿基米德螺旋线,故称为阿基米德螺杆)。 =40°;而蜗轮的齿廓为渐开线,即在主平面内,蜗杆与蜗轮的啮合如同齿条与齿轮的啮合一样。α如图3-53所示,通过蜗杆轴线并垂直于蜗轮轴线的平面为主平面。在主平面上,蜗杆的齿廓与齿条相同,两侧边为直线,夹角2因此,蜗杆传动的主要参数和几何尺寸计算大致与齿轮传动相同,并且在设计、制造中皆以主平面上的参数和尺寸为基准。普通圆柱蜗杆传动参数已标准化。 (一)蜗杆传动的主要参数 α 1.模数m和压力角 为20°。α规定为标准值。圆柱蜗杆传动的标准模数见表3-21。蜗杆传动标准压力角α相等。为了制造方便,把蜗轮的端面模数m及端面压力角α因为在主平面上蜗杆传动相当于齿条与齿轮的啮合,所以,蜗杆的轴向齿距等于蜗轮的端面周节p(图3
目录 一、课程设计任务书 (2) 二、传动方案 (3) 三、选择电动机 (3) 四、计算传动装置的总传动比及其分配各级传动比 (5) 五、传动装置的运动和动力参数 (5) 六、确定蜗杆的尺寸 (6) 七、减速器轴的设计计算 (9) 八、键联接的选择与验算 (17) 九、密封和润滑 (18) 十、铸铁减速器箱主要结构尺寸 (18) 十一、减速器附件的设计 (20) 十二、小结 (23) 十三、参考文献 (23)
一、课程设计任务书 2007—2008学年第 1 学期 机械工程学院(系、部)材料成型及控制工程专业 05-1 班级课程名称:机械设计 设计题目:蜗轮蜗杆传动减速器的设计 完成期限:自 2007年 12 月 31 日至 2008年 1 月 13 日共 2 周 指导教师(签字):年月日 系(教研室)主任(签字):年月日
二、传动方案 我选择蜗轮蜗杆传动作为转动装置,传动方案装置如下: 三、选择电动机 1、电动机的类型和结构形式 按工作要求和工作条件,选用选用笼型异步电动机,封闭式结构,电压380v, Y型。 2、电动机容量 工作机所需功率 w p KW Fv p w w 30 .1 96 .0 1000 5.2 500 1000 = ? ? = = η 根据带式运输机工作机的类型,可取工作机效率96 .0 = w η。 电动机输出功率 d p η w d p p= 传动装置的总效率 4 3 3 2 2 1 η η η η η? ? ? = 式中, 2 1 η η、…为从电动机至卷筒之间的各传动机构和轴承的效率。由表10-2 KW P w 3.1 =
7 蜗杆传动 应用和类型 传动的特点和应用 组成:蜗杆、蜗轮(一般蜗杆为主动件,蜗轮为从动件) 作用:传递空间交错的两轴之间的运动和动力。通常Σ=90° 应用:用在机床、汽车、仪器、起重运输机械、冶金机械以及其他机械制造工业中。最大传递功率为750Kw,通常用在50Kw以下。 1)、传动比大。单级时i=5~80,一般为i=15~50,分度传动时i可达到1000,结构紧凑。 2)、传动平稳、噪声小。 3)、自锁性,当蜗杆导程角小于齿轮间的当量摩擦角时,可实现自锁。 4)、蜗杆传动效率较低,其齿面间相对滑动速度大,齿面磨损严重。 5)、蜗轮的造价较高。为降低摩擦,减小磨损,提高齿面抗胶合能力,蜗轮常用贵重的铜合金制造。 7.1.2 蜗杆传动的类型 照蜗杆的形状不同分为:圆柱蜗杆传动(a)、环面蜗杆传动(b)、锥面蜗杆传动(c)。 (a)圆柱蜗杆传动 (c)锥面蜗杆传动 图7-1 蜗杆传动的类型 、圆柱蜗杆传动 右旋之分。螺杆的常用齿数(头数)z1=1~4,头数越多,传动效率越高。蜗杆加工由于安装位置不同,产生的螺旋面在相对剖面内的齿廓曲线形状不同。)、阿基米德蜗杆(ZA蜗杆) 米德蜗杆是齿面为阿基米德螺旋面的圆柱蜗杆。通常是在车床上用刃角α0=20°的车刀车制而成,切削刃平面通过蜗杆曲线,端面齿廓为阿基米德螺旋线 、缺点:蜗杆车制简单,精度和表面质量不高,传动精度和传动效率低。头数不宜过多。 用:头数较少,载荷较小,低速或不太重要的场合。
图7-2 阿基米德蜗杆 2)、法向直廓蜗杆(ZN蜗杆) 杆加工时,常将车刀的切削刃置于齿槽中线(或 法向剖面内,端面齿廓为延伸渐开线。 点:常用端铣刀或小直径盘铣刀切制,加工简便,利于加工多头蜗杆,可以用砂轮磨齿,加工精度和表面质量较高。:用于机场的多头精密蜗杆传动。 )、渐开线蜗杆(ZI蜗杆) 杆是齿面为渐开线螺旋面的圆柱蜗杆。用车刀加工时,刀具切削刃平面与基圆相切,端面齿廓为渐开线。 缺点:可以用单面砂轮磨齿,制造精度、表面质量、传动精度及传动效率较高。 用:用于成批生产和大功率、高速、精密传动,故最常用。 、环面蜗杆传动特点: (1)、齿轮表面有较好的油膜形成条件,抗胶合的承载能力和效率都较高; (2)、同时接触的齿数较多,承载能力为圆柱蜗杆传动的1.5~4倍; (3)、制造和安装较复杂,对精度要求高; (4)、需要考虑冷却的方式。 、锥面蜗杆传动 数多,重合度大,传动平稳,承载能力强; (2)、蜗轮用淬火钢制造,节约有色金属。
蜗轮蜗杆的设计计算 1、根据GB/10085-1988推荐采用渐开线蜗杆(ZI )。 2、根据传动功率不大,速度中等,蜗杆45钢,因为希望效率高些,耐磨性好,故蜗杆螺旋 齿面要求淬火,硬度45-55HRC ,蜗轮用铸锡磷青铜ZCuSn10P1金属铸造,为节约贵重金的有色金属。仅齿圈用青铜制造,而轮芯用灰铸铁HT100铸造。 3、按持卖你接触疲劳强度进行设计 a ≥32H 2])] [(σP E z z KT (1)作用在蜗轮上的转矩2T (2) 按1Z =2 ,η= 2T =?610?2p 2n =?610??mm ?N 确定载荷系数K , 取A K = βK =1 v K = 所以得K= A K ? βK ?v K =?? (3)确定弹性影响系数E Z =16021MPa (铸锡青铜蜗轮与钢蜗杆相配) (4)确定接触系数p Z 假设a d 1= 从表11-18查得p Z = (5)确定接触应力[H σ] 根据材料ZCuSn10P1,蜗杆螺旋齿面硬度>45HRC ,从表11-7查得蜗轮许用应力 '][H σ=268MPa N=60j 2n h L =???20=?8 10 寿命系数HN K =8871074.110?=067则 [H σ] =HN K ?'][H σ=?= (6)计算中心距 a ≥32])56 .1799.2160(8625821.1??? = 取a=100.因为i-15 故从表11-15中取模数m=5 1d =50mm
这时 a d 1=100 50= 从图11-18,可查的接触系数'Z ρ=<,所以计算结果可用。 4、蜗杆蜗轮的主要参数 (1)蜗杆:轴向齿距Pa=得直径系数q=10 齿顶园直径a1d =60,齿根圆f1d =38,分度圆导角r=11 18 36 ,蜗杆轴向齿厚Sa=5π/2= (2)蜗轮 齿数2Z =31 变位系数2x = 验算传动比i=2Z /1Z =31/2= 误差为15 155.15-=%,在允许范围内,所以可行。 蜗轮分度圆直径2d =m ?2Z =5?31=155mm 蜗轮喉圆直径a2d =2d +2a2h =155+2?5=165mm 蜗轮齿根圆直径f2d =2d +2f2h =??=143mm 蜗轮喉母圆半径g2r =a-a2d 21=100-1552 1?= 5、校核齿根弯曲疲劳强度 F σ=m d d KT 53.12122Fa Y βY ≤][F σ 当量齿数v2Z = 31.11cos 2 Z =31/ = 根据2x = v2Z =从图11-19查得齿形系数2Fa Y = βY =1-r/140=140= F σ=][F σFN K ,2从11-8查得ZCuSn10P1制造蜗轮时许用弯曲应力][F σ=56MPa 寿命系数 FN K =98 61074.110?= F σ=5 501558625821.153.1??????,弯曲强度满足要求。 6、验算效率
一、蜗轮、蜗杆齿轮的功用与结构 蜗轮、蜗杆的功用主要用于传递交错轴间运动和动力,通常,轴交角∑=90°。其优点是传动比大,工作较平稳,噪声低,结构紧凑,可以自锁;缺点是当蜗杆头数较少时,传动效率低,常需要采用贵重的减摩有色金属材料,制造成本高。 蜗轮是回转形零件,蜗轮的结构特点和齿轮基本相似,直径一般大于长度,通常由外圆柱面、内环面、内孔、键槽(花键槽)、轮齿、齿槽等组成。根据结构形式的不同,齿轮上常常还有轮缘、轮毂、腹板(孔板)、轮辐等结构。按结构不同蜗轮可分为实心式、腹板式、孔板式、轮辐式等多种型式。 蜗杆的结构和轴相似,其结构特点是长度一般大于直径,通常由外圆柱面、圆锥面、螺纹及阶梯端面等所组成。蜗杆上啮合部分的轮齿呈螺旋状,有单头和多头之分,单头蜗杆的自锁性能好、易加工,但传动效率低。 二、普通圆柱蜗轮、蜗杆的测绘步骤 蜗轮、蜗杆的测绘比较复杂,要想获得准确的测绘数据,就必须具备较全面的蜗杆传动方面的知识。同时应合理选择测量工具及必要的检测仪器,掌握正确的测量方法,并对所测量的数据进行合理的分析处理,提出接近或替代原设计的方案,直接为生产服务。 测绘蜗轮、蜗杆时,主要是确定蜗杆轴向模数m a(即蜗轮端面模数m t),蜗杆的直径系数q和导程角γ(即蜗轮的螺旋角β)。下面以普通圆柱蜗轮蜗杆测绘为例,说明标准蜗轮蜗杆的基本测绘步骤。 1. 首先对要测绘的蜗轮、蜗杆进行结构和工艺分析。 2. 画出蜗轮、蜗杆的结构草图和必须的参数表,并画出所需标注尺寸的尺寸界线及尺寸线。 3. 数出蜗杆头数z1和蜗轮齿数z2。 4. 测量出蜗杆齿顶圆直径d a l、蜗轮喉径d a i和蜗轮齿顶外圆直径d ae。 5. 在箱体上测量出中心距a。 6. 确定蜗杆轴向模数m a (即涡轮端面模数m t) 7. 确定蜗杆的导程角γ(蜗轮的螺旋角β),并判定γ及β的方向。 根据计算公式tgγ= z 1m a / d1,因d1= d a1-2m a则 γ= tg -1 z1m a/ (d a1-2m a) 8. 确定蜗杆直径系数q 根据计算公式q = d 1/ m a 或q = z 1/ tg γ计算出q值,且应按标准系列选取与其相近的标 准数值。 9. 根据计算公式,计算出其它各基本尺寸,如齿根圆直径d f1、d f2,齿顶高h a1、h a2,齿根高h f1、h f2等。 10. 所得尺寸必须与实测中心距a核对,且符合计算公式: a = m a / 2 (q+z2) 11. 测量其它各部分尺寸,如毂孔直径、键槽尺寸等。 12. 根据使用要求,确定蜗轮、蜗杆的精度,一般为7~9级。 13. 用类比法或查资料确定配合处的尺寸公差和形位公差。 14. 用粗糙度量块对比或根据各部分的配合性质确定表面粗糙度。 15. 尺寸结构核对无误后,绘制零件图。 三、普通圆柱蜗杆、蜗轮的测绘 1. 几何参数的测量 (1)蜗杆头数z1〔齿数)、蜗轮齿数z2 目测确定z1,并数出z2。
7 蜗杆传动 7.1 蜗杆传动的特点、应用和类型 7.1.1蜗杆传动的特点和应用 组成:蜗杆、蜗轮(一般蜗杆为主动件,蜗轮为从动件) 作用:传递空间交错的两轴之间的运动和动力。通常Σ=90° 应用:用在机床、汽车、仪器、起重运输机械、冶金机械以及其他机械制造工业中。最大传递功率为750Kw,通常用在50Kw 以下。 特点: 1)、传动比大。单级时i=5~80,一般为i=15~50,分度传动时i可达到1000,结构紧凑。 2)、传动平稳、噪声小。 3)、自锁性,当蜗杆导程角小于齿轮间的当量摩擦角时,可实现自锁。 4)、蜗杆传动效率较低,其齿面间相对滑动速度大,齿面磨损严重。 5)、蜗轮的造价较高。为降低摩擦,减小磨损,提高齿面抗胶合能力,蜗轮常用贵重的铜合金制造。 7.1.2 蜗杆传动的类型 按照蜗杆的形状不同分为:圆柱蜗杆传动(a)、环面蜗杆传动(b)、锥面蜗杆传动(c)。 (a)圆柱蜗杆传动(b)环面蜗杆传动(c)锥面蜗杆传动 图7-1 蜗杆传动的类型 1、圆柱蜗杆传动 蜗杆有左、右旋之分。螺杆的常用齿数(头数)z1=1~4,头数越多,传动效率越高。蜗杆加工由于安装位置不同,产生的螺旋面在相对剖面内的齿廓曲线形状不同。 1)、阿基米德蜗杆(ZA蜗杆) 如图所示,阿基米德蜗杆是齿面为阿基米德螺旋面的圆柱蜗杆。通常是在车床上用刃角α0=20°的车刀车制而成,切削刃平面通过蜗杆曲线,端面齿廓为阿基米德螺旋线。其齿面为阿基米德螺旋面。 优、缺点:蜗杆车制简单,精度和表面质量不高,传动精度和传动效率低。头数不宜过多。 应用:头数较少,载荷较小,低速或不太重要的场合。
图7-2 阿基米德蜗杆 (2)、法向直廓蜗杆(ZN蜗杆) 如图所示,法向直廓蜗杆加工时,常将车刀的切削刃置于齿槽中线(或 齿厚中线)处螺旋线的法向剖面内,端面齿廓为延伸渐开线。 优、缺点:常用端铣刀或小直径盘铣刀切制,加工简便,利于加工多头蜗杆,可以用砂轮磨齿,加工精度和表面质量较高。 应用:用于机场的多头精密蜗杆传动。 3)、渐开线蜗杆(ZI蜗杆) 如图所示,渐开线蜗杆是齿面为渐开线螺旋面的圆柱蜗杆。用车刀加工时,刀具切削刃平面与基圆相切,端面齿廓为渐开线。 优、缺点:可以用单面砂轮磨齿,制造精度、表面质量、传动精度及传动效率较高。 应用:用于成批生产和大功率、高速、精密传动,故最常用。 2、环面蜗杆传动特点: (1)、齿轮表面有较好的油膜形成条件,抗胶合的承载能力和效率都较高; (2)、同时接触的齿数较多,承载能力为圆柱蜗杆传动的1.5~4倍; (3)、制造和安装较复杂,对精度要求高; (4)、需要考虑冷却的方式。 3、锥面蜗杆传动 特点:(1)、啮合齿数多,重合度大,传动平稳,承载能力强; (2)、蜗轮用淬火钢制造,节约有色金属。
蜗轮蜗杆传动设计
7 蜗杆传动 应用和类型 传动的特点和应用 组成:蜗杆、蜗轮(一般蜗杆为主动件,蜗轮为从动件) 作用:传递空间交错的两轴之间的运动和动力。通常Σ=90° 应用:用在机床、汽车、仪器、起重运输机械、冶金机械以及其他机械制造工业中。最大传递功率为750Kw,通常用在50Kw以下。 1)、传动比大。单级时i=5~80,一般为i=15~50,分度传动时i可达到1000,结构紧凑。 2)、传动平稳、噪声小。 3)、自锁性,当蜗杆导程角小于齿轮间的当量摩擦角时,可实现自锁。 4)、蜗杆传动效率较低,其齿面间相对滑动速度大,齿面磨损严重。 5)、蜗轮的造价较高。为降低摩擦,减小磨损,提高齿面抗胶合能力,蜗轮常用贵重的铜合金制造。 7.1.2 蜗杆传动的类型 照蜗杆的形状不同分为:圆柱蜗杆传动(a)、环面蜗杆传动(b)、锥面蜗杆传动(c)。 (a)圆柱蜗杆传 (b)环面蜗杆传动(c)锥面蜗杆传动 图7-1 蜗杆传动的类型 、圆柱蜗杆传动 右旋之分。螺杆的常用齿数(头数)z1=1~4,头数越多,传动效率越高。蜗杆加工由于安装位置不同,产生的螺旋面在相对剖面内的齿廓曲线形状不同。)、阿基米德蜗杆(ZA蜗杆) 米德蜗杆是齿面为阿基米德螺旋面的圆柱蜗杆。通常是在车床上用刃角α0=20°的车刀车制而成,切削刃平面通过蜗杆曲线,端面齿廓为阿基米德螺旋线
、缺点:蜗杆车制简单,精度和表面质量不高,传动精度和传动效率低。头数不宜过多。 用:头数较少,载荷较小,低速或不太重要的场合。 图7-2 阿基米德蜗杆 2)、法向直廓蜗杆(ZN蜗杆) 杆加工时,常将车刀的切削刃置于齿槽中线(或 法向剖面内,端面齿廓为延伸渐开线。 点:常用端铣刀或小直径盘铣刀切制,加工简便,利于加工多头蜗杆,可以用砂轮磨齿,加工精度和表面质量较高。:用于机场的多头精密蜗杆传动。 )、渐开线蜗杆(ZI蜗杆) 杆是齿面为渐开线螺旋面的圆柱蜗杆。用车刀加工时,刀具切削刃平面与基圆相切,端面齿廓为渐开线。 缺点:可以用单面砂轮磨齿,制造精度、表面质量、传动精度及传动效率较高。 用:用于成批生产和大功率、高速、精密传动,故最常用。
蜗轮蜗杆减速器设计 摘要 通过对减速器的简单了解,开始学习设计齿轮减速器,尝试设计增强感性认知和对社会的适应能力,及进一步巩固已学过的理论知识,提高综合运用所学知识发现问题、解决问题,以求把理论和实践结合一起,为以后的工作和更好的学习积累经验。学习如何进行机械设计,了解机械传动装置的原理及参数搭配。学习运用多种工具,比如CAD等,直观的呈现在平面图上。通过对圆柱齿轮减速器的设计,对齿轮减速器有个简单的了解与认知。齿轮减速器是机械传动装置中不可缺少的一部分。机械传动装置在不断的使用过程中,会不同程度的磨损,因此要经常对机械予以维护和保养,延长其使用寿命,高效化的运行,提高生产的效率,降低生产的成本,获得最大的使用效率。 关键词:机械传动装置、齿轮减速器、设计原理与参数配置
In this paper Through the simple understanding of the speed reducer, started lea rning design of gear reducer, attempt to design enhance the perce ptual cognition and ability to adapt to society, and further cons olidate the learned theory knowledge, to improve the integrated us e of knowledge discovery and solve problems, in order to combine theory and practice together, for the later work and better lea rning experience. Learn how to do mechanical design, to understand the principle of mechanical transmission device and parameter collocation. Study us ing a variety of tools, such as CAD, intuitive present on the f loor plan. Through the design of cylindrical gear reducer, gear r educer is a simple understanding and cognition. Gear reducer is a n indispensable part of in mechanical transmission device. Mechanic al transmission device in use process, will be different degree o f wear and tear, so often to mechanical maintenance and maintenan ce, prolong the service life and highly effective operation, impro ve production efficiency, reduce the cost of production, achieve m aximum efficiency. Keywords: mechanical transmission gear, gear reducer, the design pr inciple and parameter configuration
】 目录 第一章总论......................................................... - 2 - 一、机械设计课程设计的内容....................................... - 2 - 二、设计任务..................................................... - 2 - · 三、设计要求..................................................... - 3 - 第二章机械传动装置总体设计......................................... - 3 - 一、电动机的选择................................................. - 4 - 二、传动比及其分配............................................... - 4 - 三、校核转速..................................................... - 5 - 四、传动装置各参数的计算......................................... - 5 - 第三章传动零件—蜗杆蜗轮传动的设计计算............................. - 5 - 一、蜗轮蜗杆材料及类型选择....................................... - 6 - & 二、设计计算..................................................... - 6 - 第四章轴的结构设计及计算.......................................... - 10 - 一、安装蜗轮的轴设计计算........................................ - 10 - 二、蜗杆轴设计计算.............................................. - 15 - 第五章滚动轴承计算................................................ - 17 - 一、安装蜗轮的轴的轴承计算...................................... - 18 - 二、蜗杆轴轴承的校核............................................ - 18 - 第六章键的选择计算................................................ - 19 -. 第七章联轴器...................................................... - 20 -第八章润滑及密封说明.............................................. - 20 -第九章拆装和调整的说明............................................ - 20 -第十章减速箱体的附件说明.......................................... - 20 -课程设计小结........................................................ - 21 -参考文献............................................................ - 22 - ,
蜗轮蜗杆减速机设计参数 名称计算关系式说明 中心距 a a=(d1+d2+2x2m)/2 按规定选取 蜗杆头数z1按规定选取 蜗轮齿数z2按传动比确定 齿形角ααa=20。或αn=20。按蜗杆类型确定 模数m m=m a=m n/cosγ按规定选取蜗轮变位系数x2x2=a/m-(d1+d2)/2m 蜗杆直径系数q q=d1/m 蜗杆轴向齿距p x p x=πm 蜗杆导程p z p z=πmz1 蜗杆分度圆直径d1d1=mq 按规定选取蜗杆齿顶圆直径d a1d a1=d1+2h a1=d1+2h a*m 蜗杆齿根圆直径d f1d f1=d1-2h f1=d a-2(h a*m+c) 顶隙 c c=c*m 按规定 渐开线蜗杆齿根圆直径d b1d b1=d1.tgγ/tgγb=mz1/tgγb 蜗杆齿顶高h a1h a1=h a*m=1/[2(d a1-d1)] 按规定 蜗杆齿根高h f1h f1=(h a*+c*)m=1/[2(d1-d f1)] 蜗杆齿高h1h1=h f1+h a1=1/[2(d a1-d f1)] 蜗杆导程角γtgγ=mz1/d1=z1/q 渐开线蜗杆基圆导程角γb cosγb=cosγ.cosαn 蜗杆齿宽b1由设计确定蜗轮分度圆直径d2d2=mz2=2a-d1-2x2m 蜗轮喉圆直径d a2d a2=d2+2h a2 蜗轮齿根圆直径d f2d f2=d2-2h f2 蜗轮齿顶高h a2h a2=1/[2(d a2-d2)]=m(h a*+x2) 蜗轮齿根高h f2h f2=1/[2(d2-d f2)]=m(h a*-x2+c*) 蜗轮齿高h2h2=h a2+h f2=1/[2(d a2-d f2)] 蜗轮咽喉母圆半径r g2r g2=a-1/(2d a2) 蜗轮齿宽角θθ=2arcsin(b2/d1) 蜗杆轴向齿厚s a s a=1/(2πm) 蜗杆法向齿厚s n s n=s a cosγ 蜗轮齿厚s t按蜗杆节圆处轴向齿槽宽e a" 蜗杆节圆直径d1" d1"=d1+2x2m=m(q+2x2) 蜗杆节圆直径d2" d2"=d2 图14-6 表14-1标准普通圆柱蜗杆传动几何尺寸计算公式
(二)蜗杆蜗轮的画法 1、蜗杆的画法 蜗杆一般选用一个视图,其齿顶线、齿根线和分度线的画法与圆柱齿轮相同,如图9-62所示。图中以细实线表示的齿根线也可省略。齿形可用局部剖视或局部放大图表示。 图9-62 蜗杆的主要尺寸和画法 2、蜗轮的画法 蜗轮的画法与圆柱齿轮相似,如图9-63所示。 (1)在投影为非圆的视图中常用全剖视或半剖视,并在与其相啮合的蜗杆轴线位置画出细点画线圆和对称中心线,以标注有关尺寸和中心距。 (2)在投影为圆的视图中,只画出最大的顶圆和分度圆,喉圆和齿根圆省略不画。投影为圆的视图也可用表达键槽轴孔的局部视图取代。 3、蜗杆蜗轮啮合的画法 蜗杆蜗轮啮合有画成外形图和剖视图两种形式,其画法如图9-64所示。在蜗轮投影为圆的视图中,蜗轮的节圆与蜗杆的节线相切。
图9-63 蜗轮的画法和主要尺寸 图9-64 蜗杆蜗轮啮合画法 蜗轮蜗杆传动 蜗杆蜗轮用于两交叉轴间的传动,交叉角一般为 90°。通常蜗杆主动,蜗轮从动,用作减速装置获 得较大的传动比。除此之外,蜗杆传动往往具有反 向自锁功能,即只能由蜗杆带动蜗轮,而蜗轮不能 带动蜗杆,故它常用于起重或其它需要自锁的场合。 (蜗杆蜗轮动画演示)
◆蜗杆蜗轮的主要参数与尺寸计算
蜗杆蜗轮的主要参数有:模数m、蜗杆分度圆直径d、导程角γ、、中心距a、蜗杆头数z1、蜗轮齿数z2等,根据上述参数可决定蜗杆与蜗轮的基本尺寸,其中z1、z2由传动要求选定。几何尺寸计算如下表所示。 ◆蜗杆蜗轮的画法 蜗杆一般选用一个视图,其齿顶线、齿根线和分度线的画法与圆柱齿轮相同,如下图所示。图中以细实线表示的齿根线也可省略。齿形可用局部剖视或局部放大图表示。 ◆蜗轮的画法 (1)在投影为非圆的视图中常用全剖视或半剖视,并在与其相啮合的蜗杆线位置画出细点画线圆和对称中心线,以标注有关尺寸和中心距。 (2)在投影为圆的视图中,只画出最大的顶圆和分度圆,喉圆和齿根圆省略不画。投影为圆的视图也可用表达键槽轴孔的局部视图取代。