东南大学自动化学院
实验报告课程名称:计算机控制实验
第三次实验
实验名称:最少拍控制算法研究
院(系):自动化专业:自动化姓名:学号:
实验室:实验组别:
同组人员:实验时间:2012 年 4 月20 日评定成绩:审阅教师:
实验四 最少拍控制算法研究
一、实验目的
1.学习并熟悉最少拍控制器的设计和算法; 2.研究最少拍控制系统输出采样点间纹波的形成; 3.熟悉最少拍无纹波控制系统控制器的设计和实现方法。
二、实验设备
1.THBDC-1型 控制理论·计算机控制技术实验平台 2.PCI-1711数据采集卡一块
3.PC 机1台(安装软件“VC++”及“THJK_Server ”)
三、实验原理
1)最小拍系统
在采样控制系统中,通常把一个采样周期称作一拍。在典型输入信号作用下,经过最少拍,使输出量采样时刻的数值能完全跟踪参考输入量的数值,跟踪误差为零的系统称为最少拍系统。
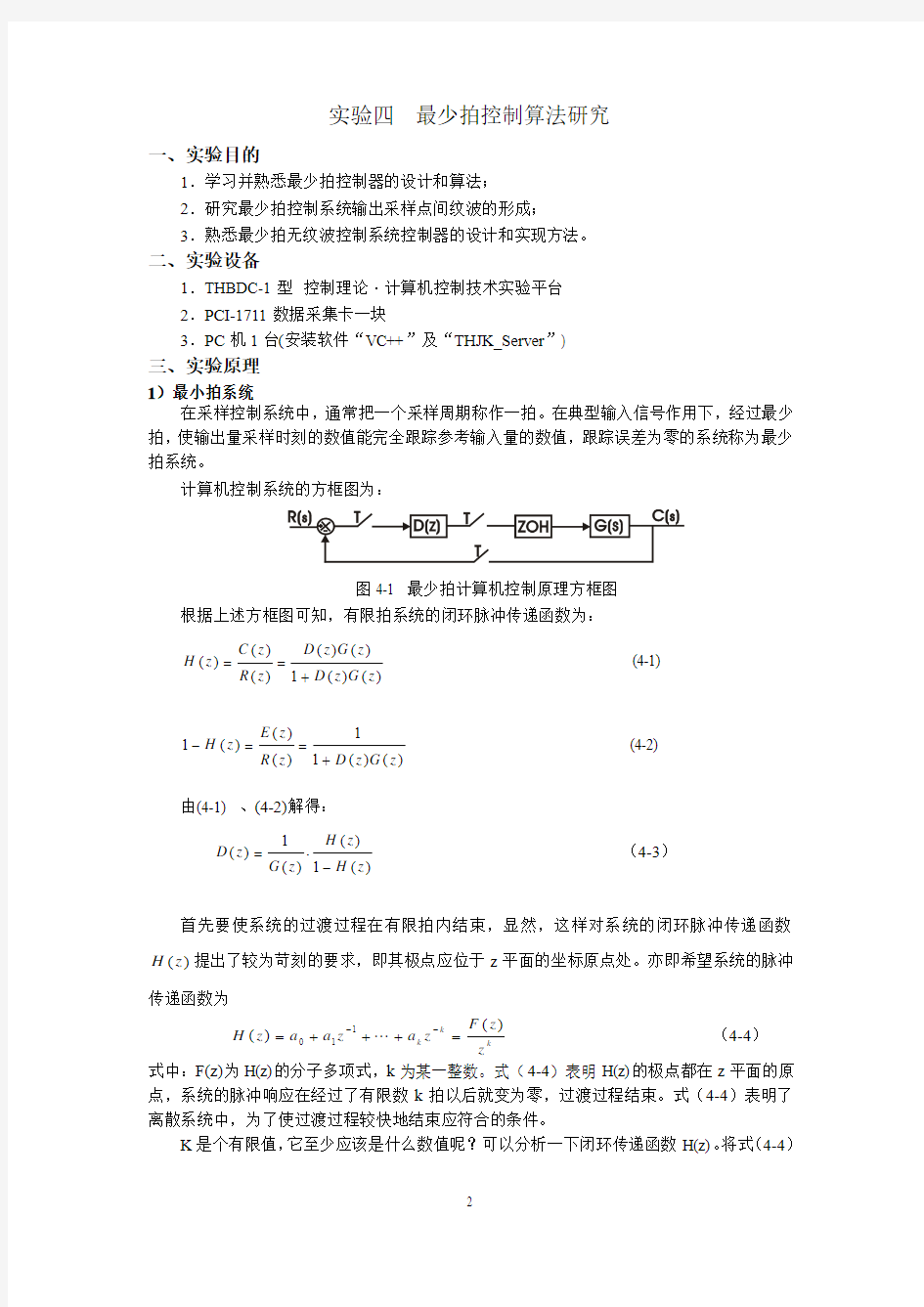
计算机控制系统的方框图为:
图4-1 最少拍计算机控制原理方框图
根据上述方框图可知,有限拍系统的闭环脉冲传递函数为: )
()(1)()()
()()(z G z D z G z D z R z C z H +=
=
(4-1)
)
()(11)
()()(1z G z D z R z E z H +=
=
- (4-2)
由(4-1) 、(4-2)解得: )
(1)
()(1
)(z H z H z G z D -?
= (4-3)
首先要使系统的过渡过程在有限拍内结束,显然,这样对系统的闭环脉冲传递函数
)(z H 提出了较为苛刻的要求,即其极点应位于z 平面的坐标原点处。亦即希望系统的脉冲
传递函数为
1
01()()k
k k
F z H z a a z
a z
z
--=+++=
(4-4)
式中:F(z)为H(z)的分子多项式,k 为某一整数。式(4-4)表明H(z)的极点都在z 平面的原点,系统的脉冲响应在经过了有限数k 拍以后就变为零,过渡过程结束。式(4-4)表明了离散系统中,为了使过渡过程较快地结束应符合的条件。
K 是个有限值,它至少应该是什么数值呢?可以分析一下闭环传递函数H(z)。将式(4-4)
代入D(z)表示式,得
)]
([)
()(1
)(1)
()(1
)(z F z z F z G z H z H z G z D k
-?
=
-?=
(4-5)
如果m 和n 分别为对象和保持器的组合脉冲传递函数G(z)的分子和分母的阶次,l 为式(4-5)
中F(z)的阶次,要使D(z)能实现,就应使分母的阶次大于分子的阶次
k n m l ≥-+ (4-6)
由式(4-6)可见,当0l =时,H(z)的分子0()F z F ==常数,暂态响应的持续节拍数最少。式中n 和m 是由对象、保持器决定的,是不可变部分。这时应有
k n m ≥- (4-7)
这是过渡过程所能达到的最低极限节拍数,它规定了“最少拍”的极限数。
2)无稳态误差的最小拍系统 由王勤主编教材P89~P90的理论推导,可以知道,为保证系统稳态误差为零且拍数最少,应取
1
11()(1)()k
H z z F z --=-
(4-8)
其中1()F z 为不包含G(z)的零点和极点的多项式。为式(4-8)表示了无稳态误差的最少拍系统,其1()H z -满足的条件。另外,为了使系统的暂态过程在有限时间内结束,H(z)必须是1z -的有限多项式。这两者都要满足,因而应使1()F z 为1z -的有限多项式。最简单的情况是1()1F z =,这时 (1)对阶跃输入
1
1()1H z z
--=-
1
()H z z
-= 因而1
1
)(1
1)(1
)
(1)
()(1
)(1
1-?=
-?
=
-?
=
--z z G z
z
z G z H z H z G z D
(2)对斜坡函数输入
12
1()(1)H z z --=-
或 1
2
()2H z z
z
--=-
从而有 2
2
1
21
)
1(1
2)(1
)
1(2)
(1)(--?=
--?
=---z z z G z z
z
z G z D
(3)对加速度函数输入
13
1()(1)H z z --=-
或 123
()33H z z z z ---=-+
从而有 3
2
3
1
3
21
)
1(133)
(1)
1(33)
(1)(-+-?
=
-+-?
=----z z z z G z z
z
z
z G z D
3)无纹波,无稳态误差的最少拍系统 用前述方法设计的最少拍控制系统,对于符合原设计的输入信号能很快地跟踪。然而,如果进一步用改进的z 变换法来研究所设计的系统,就会发现问题。这种改进的z 变换不仅能求出采样时刻的系统输出,而且可以研究采样间隔中,输出的变化情况。用这种z 变换将发现用前述方法设计的系统,在采样时刻之间存在着波动。
有纹波的系统,在采样时刻之间存在误差,而且功率损耗、振动等也很大,它将加快执行机构等可动部件的磨损。为此,必须改进设计方法,使设计出的系统满足无纹波的条件。 (1)最少拍系统产生纹波的原因
经分析可知,最少拍系统虽然经过有限拍后能使采样时刻的稳态误差为零,从而使数字控制器的离散输入量E(z)为零。但控制器的输出并没有达到稳态值,仍然是上下波动的。亦即控制器的输出U(z)不能在有限拍内变为零。如果整个系统以U(z)为输出量,设这时的闭环传递函数为()D H z 。同样,如果这一闭环传递函数也能表示成极点都在z 平面原点的形式,则过渡过程也能在有限拍内结束。 (2)无纹波最少拍系统的设计
根据王勤主编教材P93的理论推导可知,无纹波最少拍系统的闭环传递函数应分别为
0()()
()
()k
k
F z P z F z H z z z ==
(4-9)
0()()
()D k
F z Q z H z z
=
(4-10)
式中:()()()
P z G z Q z =
,0()F z 为z 的多项式。
上述传递函数能保证系统的输出Y(z)和控制器输出U(z)的暂态过程均能在有限拍内结束。
式(4-9)说明,无纹波最少拍系统的闭环传递函数H(z)不仅应为1z -的多项式,而且应包含G(z)的全部零点。
由式(4-5)可得
)
()()()()
(1)
()(1
)(00z P z F z z Q z F z H z H z G z D k
-=
-?=
在最简单的情况下,0()F z 为常数。为了保证D(z)是可实现的,至少要使k 大于或等于Q(z)的阶次,即
k n ≥ (4-11)
将式(4-7)与式(4-11)相比,发现由于要求无纹波,系统的最少拍增加了m 拍,响应的暂态过程也延长m 拍。
4)斜坡输入下最少拍系统设计举例
(1)斜坡输入下无稳态误差最少拍系统设计 设被控对象为二阶系统,其传递函数为)
1()(1+=
s T s K s G
对于二阶被控对象加零阶保持器后对象的传递函数为:
)
1(1)(1+?
-=
'-s T s K s
e
s G TS
选择采样周期T ,将上述传递函数离散后得
)
1)(1()()()(1
1
2
111
111
1
1
1
-----
-
------++-=z e
z z
Te e
T T z
e
T T T K
z G T T T T T T T T
因为输入是单位斜坡信号,所以选择:
21)1()(1--=-z z H 212)(---=z z z H
)
1)(1()
1)(2(]
)())[(1()
1)(2()
(1)
()(1
)
()()(1
1
1
1
1
11111
1
1
1
1
1
11
----
---------+---=--++----=-?=
=Bz z KA z e
z z Te
e
T T e
T T T z K z e
z z H z H z G z E z U z D T T T T T T T T T T
2
1
2
1
)1(1)21(2111
----
----+++-=
Bz
z
B z
e z
e KA
T T T T
其中 111
T e T T A T T -+=-
,A
Te
e
T T B T T T T 1
1
11--
--=
由此可得斜坡输入下最少拍算法的数字控制器算法为
u(k)=(1-B)u(k-1)+Bu(k-2)+
)2()1(21)(21
1
//-+
-+-
--k e KA
e
k e KA
e
k e KA
T T T T
(2)斜坡输入下无纹波、无稳态误差最少拍系统设计
)
1)(1()1()
1)(1()()()(1
1
111
1
2
111
111
1
1
1
1
--
--------
-
----+=----++-=z e
z Bz z KA
z e
z z
Te e
T T z
e
T T T K
z G T T T T T T T T T T
①保证系统在斜坡输入下的稳态误差为零,则系统的闭环传递函数应符合
1
2
11()(1)()H z z F z --=-
②稳定性原则
1()H z -应包含G(z)的不稳定极点,其形式为
1
2
11()(1)()H z z F z --=-,其中1()F z 为不包含G(z)的零点和极点的多项式。
上式和保证稳态误差为零的要求相同。
()H z 应包含G(z)的不稳定零点,其形式为
1
2()(1)()H z Bz F z -=+,其中2()F z 为不包含G(z)的零点和极点的多项式。
③无纹波有限拍暂态过程
为了实现无纹波,2()F z 中必须包含G(z)的分子上的另一因子1z -。要寻找()H z 、1()F z 和2()F z 的形式,使它们的项数最少(即最小实现)而又满足上述条件。显然应为
1
10()1F z b z
-=+
1
1
201()()F z c c z z
--=+
1
1
1
1
201()(1)()(1)()H z Bz F z Bz z c c z ----=+=++
联立求解得
1
2232
0+++=
B B
B c ,1
2)12(2
1
+++-=
B B
B c ,1
2)1(2
+++=
B B
B B b
所以有
)
1)(1()
)(1()
(1)
()(1
)
()()(1
011
101
1
-----+-+-=
-?
=
=
z
b z
KA z c c z
e z H z H z G z E z U z D T T
2
01
02
11
010)1(1)(11
1
--------+--+=
z
b z b z
e
c z
e c c c KA
T T T T
由此可得斜坡输入下最少拍无纹波的算法:
)2()1()()2()1()1()(1
1
101000--
--+
+
-+--=--k e KA
e c k e KA
e
c c k e KA
c k u b k u b k u T T T T
4)阶跃输入下最少拍系统设计举例
(1)阶跃输入下无稳态误差最少拍系统设计 设被控对象为二阶系统,其传递函数为)
1()(1+=
s T s K s G
对于二阶被控对象加零阶保持器后对象的传递函数为:
)
1(1)(1+?
-=
'-s T s K s
e
s G TS
选择采样周期T ,将上述传递函数离散后得
)
1)(1()()()(1
1
2
111
111
1
1
1
-----
-
------++-=z e
z z
Te e
T T z
e
T T T K
z G T T T T T T T T
因为输入是单位阶跃信号,所以选择:
11)(1--=-z z H 1)(-=z z H
)
1()1(]
)()[()
1()
(1)
()(1
)
()()(1
1
1
11111
1
1
1
1
1
---
----
--+-=--++--=
-?
=
=
Bz
KA z
e z
Te e
T T e T T T K z
e
z H z H z G z E z U z D T T T T T T T T T T
其中 111
T e T T A T T -+=-,A
Te
e
T T B T T T T 1
1
11-
-
--=
由此可得阶跃输入下最少拍算法(有纹波)的数字控制器算法为
u(k)= -Bu(k-1) +
)1()(11
/--
-k e KA
e
k e KA
T T
(2)阶跃输入下无纹波、无稳态误差最少拍系统设计
)
1)(1()1()
1)(1()()()(1
1
111
1
2
111
111
1
1
1
1
--
--------
-
----+=----++-=z e
z Bz z KA
z e
z z
Te e
T T z
e
T T T K
z G T T T T T T T T T T
① 证系统在阶跃输入下的稳态误差为零,则系统的闭环传递函数应符合
)()1()(111
z F z
z H --=-
②稳定性原则
1()H z -应包含G(z)的不稳定极点,其形式为 )()1()(111
z F z
z H --=-,其中1()F z 为不包含G(z)的零点和极点的多项式。
上式和保证稳态误差为零的要求相同。
()H z 应包含G(z)的不稳定零点,其形式为
1
2()(1)()H z Bz F z -=+,其中2()F z 为不包含G(z)的零点和极点的多项式。
③无纹波有限拍暂态过程
为了实现无纹波,2()F z 中必须包含G(z)的分子上的另一因子1z -。要寻找()H z 、1()F z 和2()F z 的形式,使它们的项数最少(即最小实现)而又满足上述条件。显然应为
1
10()1F z b z
-=+
1
02)(-=z
c z F
01
1
21
)1()()1()(c z
Bz
z F Bz
z H ---+=+=
联立求解得
1
10+=
B c ,1
+=
B B b
所以有
)
1()1()
(1)
()(1
)
()()(1
00
1
1
-----=
-?
=
=
z
b KA
c z
e z H z H z G z E z U z D T T
2
01
02
11
010)1(1)(11
1
------
--+--+=
z
b z b z
e
c z
e c c c KA
T T T T
由此可得阶跃输入下最少拍无纹波的算法:
))1(*)()(()1()(1
00--+--=-
k e e
k e k e KA
c k u b k u T T
四、实验步骤
1、仔细阅读“PCI-1711数据采集卡驱动函数说明.doc ”和“THJK-Server 软件使用说明.doc ”文档,掌握PCI-1711数据采集卡的数据输入输出方法和THJK-Server 软件(及相关函数)的使用方法。
2、模拟对象的模拟电路图如图4-2下所示:
图4-2 模拟对象电路
其中:R 1=100K ,R 2=100K ,R 3=100K ,C 1=10uF ,C 2=10uF
按上图连接一个积分环节和一个惯性环节组成的二阶被控对象的模拟电路; 3、系统接线图如图4-3所示:
图4-3 系统接线图
按照上图接线。
4、设计在斜坡输入下的最少拍控制器的控制算法(有纹波、无纹波)。
5、设计在单位阶跃输入下的最少拍控制器的控制算法(有纹波、无纹波)。
6、打开最少拍实验文件夹下.dsw工程文件,源程序中缺少最少拍数字控制器算法程序,请同学用设计好的控制器算法编写程序。
7、源程序编译通过后,先启动“THJK_Server”图形显示软件,再执行程序代码,在显示界面出现的曲线并稳定后(初始化后),把+5V电源打到“开”状态,观测并记录系统的响应曲线。在实验结束后,在键盘上先按下“e”,再按下“Enter(回车键)”键,程序退出。
五、实验结果
1、编程实现在斜坡输入下的最少拍控制器的控制算法(有纹波、无纹波)。
2、编程实现在单位阶跃输入下的最少拍控制器的控制算法(有纹波、无纹波)。
程序;
double Ti=1; //二阶对象的惯性时间常数
double k=1; //二阶对象的放大倍数
double A=exp(-1); //以下参数对应讲义中推导出的公式中的参数
double B=(1-2*exp(-1))/A;
double c0=(3*B+2)/(B*B+2*B+1);
double c1=-(2*B+1)/(B*B+2*B+1);
double b0=B*(B+1)/(B*B+2*B+1);
void CALLBACK TimeProc(UINT uID,UINT uMsg,DWORD dwUser,DWORD dw1,DWORD dw2) //控制函数
{
ADinput(1);
temp=fV oltage;
if(temp<4.9) //若开始信号未送出,即AD2的输入电压没达到5V,则不给阶
跃信号输入,初始给定值为0V
{
ADinput(0);
sv=0;
}
else
{
ADinput(0);
//sv=sv+Ts; //若开始信号送出,则给定0V到8V的斜坡信号
//if (sv>=8) sv=8;
sv=1; //若开始信号送出,则给定0V到1V的单位阶跃信号}
if(temp>4.9&&temp1<0.5)//送出给定信号(斜坡或者单位阶跃)的瞬间将n置为100
{
n=100;
}
if(n==100) //系统采样时间为100*Ts=1s
{
// /*********控制器的编程
opxx=opx;
opx=op;
eixx=eix;
eix=ei;
ei=sv-fV oltage;
//op=(1-B)*opx+B*opxx+2*ei/A-(1+2*exp(-1))*eix/A+exp(-1)*eixx/A;//斜坡有纹波
//op=(1-b0)*opx+b0*opxx+c0*ei/A+(c1-c0*exp(-1))*eix/A-c1*exp(-1)*eixx/A;//斜坡无纹波
//op=-B*opx+ei/A-exp(-1)*eix/A;//阶跃有纹波
op=(-B*opx+ei/A-exp(-1)*eix/A)/(1+B);//阶跃无纹波
// 控制器的编程*********/
if (op>9.5) {op=9.5;} //控制量限幅,具体限幅值根据对象与给定值进行改变
if (op<-9.5) {op=-9.5;}
n=0;
}
//AD采集值与控制给定值在服务器端的显示
TH_ChartY1(1,1,0.01,fV oltage);
TH_ChartY1(1,2,0.01,sv);
TH_ChartY1(1,3,0.01,op);
//在WIN32 控制台上显示变量值
printf("AD1:%.3f\n",fV oltage);
printf("DA1:%.3f\n",op);
printf("ei:%.3f\n",ei);
//采集卡DA输出
DAoutput(0,(10+op)/2); //软件电平匹配
n=n+1; //控制程序执行1次,n加1
temp1=temp;
}
3、绘制在斜坡输入下的最少拍控制的响应曲线(有纹波与无纹波)并比较分析。
1)单位斜坡输入下的有纹波最少拍控制系统
2)单位斜波输入下的无纹波最小拍控制系统
4、绘制在单位阶跃输入下的最少拍控制的响应曲线(有纹波与无纹波)并比较分析。
1)单位阶跃输入下的有纹波最少拍控制系统
2)单位阶跃输入下的无纹波最少拍控制系统
六、实验分析
1、有纹波的最少拍系统对于符合原设计的输入信号能很快的跟踪,并且消除了稳态误差。但是在采样时刻之间存在很大的波动。
2、无纹波的最少拍系统不仅能在有限拍内误差为零,而且在采样时刻之间的误差也很小。无纹波控制系统的暂态过程中比有纹波系统多几拍,但跟随性更好。
3、最少拍系统能够对输入信号很快的跟踪,但是适应性较差,适合输入信号类型变化不大的场合。
4、什么情况下最少拍比pid控制更加有效?
在知道对象的模型的前提下,且对于输入信号的类型有大概的了解,这样设计出的最少拍比pid控制更加有效。
题目一阶纯滞后系统的控制方法研究
摘要 在现代工业生产中,自动控制技术的使用越来越多,而随着工业和控制技术的发展,自动控制理论也在发展和完善,出现了多种控制方法如最基础的PID控制以及微分先行控制、中间微分控制、史密斯补偿控制、模糊控制、神经网络控制等。自动控制技术的发展在工业生产中遇到了一系列的问题:如在本文中所研究的一阶纯滞后系统的控制就是控制理论中一个较为重要的问题。由控制理论可知,无滞后控制系统(简单点说就是没有延迟)比有滞后系统更加稳定,更加容易控制。因此如何解决生产中滞后的问题在当前工业大生产中尤其重要。论文在常规PID控制也就是比例-积分-微分控制的基础上提出了三种控制方法即:微分先行控制、中间微分反馈控制、史密斯补偿控制。并对这三种方案进行Simulink仿真,检测其抗干扰性能。为便于分析,论文将所得仿真结果以图形的方式给予显示出来,形象生动便于理解。 关键词:自动控制,仿真,PID,复杂控制
The control method research of the first-order delay system Abstract The automatic control technology use more and more in modern industrial production, and as the industrial and control technology development, the automatic control theory are developed and perfected, a lot of controlled methods appear such as PID control which is the most basic control and differential first control, intermediate differential control, Smith compensation control, fuzzy control, nerve network control. Automatic control technology had experienced a series of questions in industrial production: as the first-order delay system control in this article which is a more important issue in the control theory. Known by the control theory,a no lag control system (simple say is no delay) is more stable and more easily controlled than a delay system . So it is particularly important of how to solve the lagging problem in the current industrial production . The articles propose three control methods such as differential first control 、the middle of differential feedback control、smith compensation control base the conventional PID control in the other word is proportional - integral - derivative controller .And simulate this three programs by the simulink, testing its interference fearure. For convenient analyze the simulation result , the paper of the study derive from the simulation results by the graphical ,which we can easy understand and clear know the mean in the article. Key Words:automatic control; simulation; PID; complicated control
什么是过程控制系统?其基本分类方法有哪几种? 过程控制系统通常是指连续生产过程的自动控制,是自动化技术中最重要的组成部分之一。基本分类方法有:按照设定值的形式不同【定值,随动,程序】;按照系统的结构特点【反馈,前馈,前馈-反馈复合】。 热电偶测量的基本定律是什么?常用的冷端补偿方式有哪些 均质材料定律:由一种均匀介质或半导体介质组成的闭合回路中,不论截面和长度如何以及沿长度方向上的温度分布如何,都不能产生热电动势,因此热电偶必须采用两种不同的导体或半导体组成,其截面和长度大小不影响电动势大小,但须材质均匀; 中间导体定律:在热电偶回路接入中间导体后,只要中间导体两端温度相同,则对热电偶的热电动势没有影响; 中间温度定律:一支热电偶在两接点温度为t 、t0 时的热电势,等于两支同温度特性热电偶在接点温度为t 、ta和ta、t0时的热电势之代数和。只要给出冷端为0℃时的热电势关系,便可求出冷端任意温度时的热电势,即 由于冷端温度受周围环境温度的影响,难以自行保持为某一定值,因此,为减小测量误差,需对热电偶冷端采取补偿措施,使其温度恒定。冷端温度补偿方法有冷端恒温法、冷端补偿器法、冷端温度校正法和补偿导线法。 为什么热电阻常用三线制接法?试画出其接线原理图并加以说明。 电阻测温信号通过电桥转换成电压时,热电阻的接线如用两线接法,接线电阻随温度变化会给电 桥输出带来较大误差,必须用三线接法,以抵消接线电阻随温度变化对电桥的影响。 对于DDZ-Ⅲ型热电偶温度变送器,试回答: 变送器具有哪些主要功能? 变送器的任务就是将各种不同的检测信号转换成标准信号输出。 什么是变送器零点、零点迁移调整和量程调整? 热电偶温度变送器的输入电路主要是在热电偶回路中串接一个电桥电路。电桥的功能是实现热电偶的冷端补偿和测量零点的调整。
关于谈中国经济的滞后性与中国文化的关系 按前一个较有代表性的估计?中国东沿海地区落后于西、北美约15年,西边远地区又落后上地区l5年,要赶上欧美目前的水,在一切正常理想的情况下整体估计,至少要半个世。美国学者马·韦斯的项研究表明:当今世界变化度约为以前各世纪平均发展速的5O倍,每1O的落后就是过去的5世纪! 纵观今日中国经济滞后原因,大致为四大过: 一就是历史上任何其民族都未曾经历过的二三千年延续至今不断的封建统文化。什么君子性_格,学精神,乐天品德,恬心境,不管这些传统包含么优良的成份,不管现代西人如何重新评价这些传统,并希望中寻求减缓未来振荡烈度的阻挡力但在过去的几个世纪之中,即资本主义借助工业命得以抬头的时期,在强、拼搏、竞争的年代这些传统文化肯定成中华民族被抛在后面的重要原因。 二是184o年以后我们陷入了半建半殖民地的深渊之中竟达百年久。中国人在这一深渊中,不仅国家虚弱而饱受了屈辱和伤害,而因性格的软弱而培养了或者是微的崇洋媚外,或者反常的盲目排外,又或是自暴自弃、苟安偷生的乐天安命?并陷入了传统文化受到压抑抛弃,外来文化又受敌视、排斥的痛苦心境之中。在这年之间,中国的政治经济、社会、科学、育均受到了极大的扭曲。 第三是解放后,我们用教主义、官僚主义度接受联模式,并强化其弱点。特别在过集权、压制民主、束缚自由、压个性、限制文化选择、闭社会活动、僵化体制、死思想、听任官僚主义盛行、用政统治一切
等方面,我们1957年转向后越走越远。第四1957年的突然转向,直至发到“继续革命”的十动乱。翻开历史我们不难现,几乎所有我们今天关于革的主要思想,特别是关于发展济、现代化,对知识与人才的识、政治民主等思想,在1956年都曾出现过。而从1948年至1973年,世界济正走上空前大发的道路,呈现出有史以来最富生气的景象。整个世界工业革命转向信息革命是从1956年开始的,美国白阶层超过蓝领工人在1956—1957年出现……正当世界急剧前发展变化的时候,我们竟整整20年步步与世界潮背道而驰。 这四大过程是相的。例如,十年动乱就是封建僵借苏联僵化模式和扭曲心态还魂的物,其中任何一过程都不可能单地导致今天中国的落后结呆这四大过程也形成了当代中国文化四大背景,并且将会在当长的时间内影响中入今后的每一步行动,其对于日中国经济滞后性影响主要表现为: 1、当前经济生中存在的问题主要是,有效需求不,就业压力增大,农收入增长缓慢,结构不合理的矛盾加突出,行业垄断现实存在著名经济学家吴敬教授指出,尽管十年来我国的经济总增长很快,年增长约8但结构和效益状况与架不相称,经济结构调的问题不解决,我国经济的续、快速、稳定发就很难得到保证。 2、国企改革困难重重国有经济目前存在问题,不仅源于国有企业产界定的缺陷和政企职能不分的状况以及由此导致的经营机制僵,还源于国有经济战线太长,局太散,单从企业微观层面入进行企业改革,很难取得突。要改变国有经济不能令人满的状况,就必须对其进行战
第七章 一、 1、A 2、D 3、B 4、D 5、C 6、A 7、B 8、C 9、B 10、D 11、A 12、A 13、C 14、A 15、D 二、 1、ABD 2、BC 3、ACD 4、ABD 5、ABC 三、 1、滞后现象:解释变量需要通过一段时间才能完全作用于被解释变量。原因:心理预期因素、技术因素、制度因素。 2、存在的问题:自由度问题、多重共线性问题、滞后长度难于确定。利用经验加权估计法和阿尔蒙法。 3、有滞后现象。 四、 1、对 2、错 3、错 4、对 5、错 五、 1、 0010122012301240120,,24,39,4160. a a a a a a a a a a a a a βββββ===++=++=++=++= 解方程可得,01121314330,,,,0 4 4 a a a βββββ==== =。 2、 3、首先将M 滞后一期并乘上1(1)γ-得到 ** 1111111211(1)(1)(1)(1)t t t t M Y R γγαγβγβμ-----=-+-+-+ * * 1111121111* *1112221111 * * * 11122112111* * 111221(1)[(1)](1)[(1)](1)[(1)()](1)[(1)]t t t t t t t t t t t t t t t t t t t t t M M Y R R Y R R Y R R R Y R R γαγβγβγμγμαγβγβγγγμγμαγβγβγγγμγμαγβγβγ---------?--=++--+--=++--+-+--=++--+-+--=++--+* 212111* 11122212111 ()(1)()(1)t t t t t t t t R Y R R βγγμγμαγβγβγβγγμγμ-----+--=+++-+--
过程控制系统课程设计题目之十三 大纯滞后过程特性Smith 预估控制 对于一个大纯滞后过程特性的对象:s PC e s s s G 10) 12)(3(1 )(-++= ,试设计一 个Smith 预估控制系统,并用SIMULINK 和MATLAB 程序仿真实现。当系统设定值R(s)为1时,调整PI 参数,使过渡过程尽可能满意。(假设检测变送环节的传递函数为1);比较在预估模型有偏差时,在相同的输入条件下,与预估模型无偏差情况的仿真结果;如果系统有扰动信号F(s)为单位阶跃信号或SINS 信号时,比较系统的仿真结果;如有可能,再试设计一种改进的Smith 预估器。 实验报告要求: 1、供系统仿真图; 2、按照题目要求,给出每个实验的仿真结果图; 3、根据以上仿真结果,分析)(s G PC 有滞后与无滞后情况下,PI 参数整定的特点。
大纯滞后过程特性Smith预估控制 摘要:Matlab 是一套高性能的数值计算和可视化软件。它集数值分析、矩阵计算、信号分析与图形显示为一体,构成的一个方便的、界面友好的用户环境。历经二十几年的发展和竞争,现已成为国际公认的最优秀的科技应用软件。Matlab 最突出的特点就是简洁、它用直观的、符合人们思维习惯的代码、代替C 语言和FORTRAN 语言的冗长代码。为此,Matlab 获得了对应用学科的极强适应力。在国内外高校、Matlab 已成为大学生,硕士生、博士生必须掌握的基本技能。在设计研究学位和工业部门,Matlab 已经成为研究和解决各种具体工程问题的一种标准软件。Matlab 软件广泛用于数字信号分析,系统识别,时序分析与建模,神经网络、动态仿真等方面有着广泛的应用。利用Matlab 这个最优秀的科技软件,把计算机技术与信号分析紧密地结合起来,对信号进行分析处理仿真研究,经实例验证,取得了非常好的效果,具有一定的实用价值。本文控制系统为研究主体,提出一种Smith 预估控制算法,通过设计自适应非线性反馈回路来自适应调节参数,从而满足对象参数大幅度变化的要求。 关键词:Matlab;纯滞后;Smith 预估控制器;Simulink Pure time-delay system control algorithm of Smith Abstract:Matlab is a software.of high performance of numerical calculation and visualization It get numerical analysis, calculation and signal analysis and graphic display together, constitute a convenient, interface, user friendly environment. After 20 years of development and competition, has become internationally recognized the best technology application software. The most prominent feature of Matlab is concise, it use the people's thinking and habits of the visual code, instead of C language and FORTRAN language lengthy code.So, Matlab acquire the subject of application for science. Matlab,has become acollege students’, masters’ or doctors’ basic skills which must be grasp of both at home and abroad ,. In the design research degree and industrial department, Matlab has become the research and solve specific engineering problems are a standard software. Matlab software widely used in digital signal analysis, system identification, timing analysis and modeling, neural network, dynamic simulation, etc in a wide range of applications. The best use of Matlab software technology, computer technology and signal analysis closely together, the signal analysis simulation, and achieved very good results since it has certain practical value. This control system as a main body of research, and put forward a II
过程控制工程课后习题参考答案-前三章
过程控制工程 第一章单回路控制系统 1.1 何谓控制通道?何谓干扰通道?它们的特性对控制系统质量有什么影响? 控制通道——是指操纵变量与被控变量之间的信号联系; 干扰通道——是指干扰作用与被控变量之间的信号联系。 (1)控制通道特性对系统控制质量的影响:(从K、T、τ三方面) 控制通道静态放大倍数越大,系统灵敏度越高,余差越小。但随着静态放大倍数的增大,系统的稳定性变差。 控制通道时间常数越大,经过的容量数越多,系统的工作频率越低,控制越不及时,过渡过程时间越长,系统的质量越低,但也不是越小越好,太小会使系统的稳定性下降,因此应该适当小一些。 控制通道纯滞后的存在不仅使系统控制不及时,使动态偏差增大,而且还还会使系统的稳定性降低。 (2)干扰通道特性对系统控制质量的影响:
(从K、T、τ三方面) 干扰通道放大倍数越大,系统的余差也越大,即控制质量越差。 干扰通道时间常数越大,阶数越高,或者说干扰进入系统的位置越远离被控变量测量点而靠近控制阀,干扰对被控变量的影响越小,系统的质量则越高。 干扰通道有无纯滞后对质量无影响,不同的只是干扰对被控变量的影响向后推迟一个 。 纯滞后时间τ 1.2 如何选择操纵变量? 1)考虑工艺的合理性和可实现性; 2)控制通道静态放大倍数大于干扰通道静态放大倍数; 3)控制通道时间常数应适当小一些为好,但不易过小,一般要求小于干扰通道 时间常数。干扰动通道时间常数越大 越好,阶数越高越好。 4)控制通道纯滞后越小越好。 1.3 控制器的比例度δ变化对控制系统的控制精度有何影响?对控制系统的动态质量有何影响? 比例度δ越小,系统灵敏度越高,余差越小。
实验三 纯滞后控制实验 1. 实验目的与要求 (1) 掌握应用达林算法进行纯滞后系统D(z)的设计; (2) 掌握纯滞后系统消除振铃的方法。 2. 实验设备 (1) 硬件环境 微型计算机一台,P4以上各类微机 (2) 软件平台 操作系统:Windows 2000以上; 仿真软件工具:MATLIB5.3以上。 3. 实验原理 在一些工业过程(如热工、化工)控制中,由于物料或能量的传输延迟,许多被控制对象具有纯滞后性质。例如,一个用蒸汽控制水温的系统,蒸汽量的变化要经过长度为L 的路程才能反映出来。这样,就造成水温的变化要滞后一段时间τ(v v L ,=τ是蒸汽的速度)。对象的这种纯滞后性质常会引起系统产生超调和振荡。因此,对于这一系统,采用一般的随动系统设计方法是不行的,而用PID 控制往往效果也欠佳。 本实验采用达林算法进行被控制对象具有纯滞后系统设计。设被控对象为带有纯滞后的一阶惯性环节或二阶惯性环节,达林算法的设计目标是使整个闭环系统所期望的传递函数Φ(s),相当于一个延时环节和一个惯性环节相串联,即 1 )(+=Φ-s e s s τθ,NT =θ 该算法控制将调整时间的要求放在次要,而超调量小甚至没有放在首位。控制原理如图1,其中:采样周期T=0.9秒,期望传递函数τ=0.5秒,被控对象 1 23)(8.1+=-s e s G s ;输入信号为单位阶跃信号。
图1 纯滞后系统控制原理图 应用达林算法进行纯滞后系统设计) D控制器。 (z 4.实验内容与步骤 (1)按照纯滞后控制系统要求设计) D; (z (2)按照系统原理图,在simulink下构造系统结构图模型,观察输入输出波形,标明参数,打印结果; (3)尝试用M文件实现dalin算法控制。 5.实验结果 simulink框图(用simulink实现dalin算法): Array 图2 纯滞后控制设计
滞后型薪酬策略又称为“成本导向策略”、“落后薪酬水平策略”或“拖后型薪酬政策”,采取本组织的薪酬水平低于竞争对手或市场薪酬水平的策略。 采用滞后型薪酬策略的企业,大多处于竞争性的产品市场上,边际利润率比较低,成本承受能力很弱。 受产品市场上较低的利润率所限制,没有能力为员工提供高水平的薪酬,是企业实施滞后型薪酬策略的一个主要原因。当然,有些时候,滞后型薪酬策略的实施者并非真的没有支付能力,而是没有支付意愿的问题。 不可将其作为长期策略,否则无法留住员工;要有其它的优势来弥补低薪的劣势;以未来更高的收入作为期望目标。 滞后型薪酬策略具有很高的风险,很可能招不到人,还会引起员工频繁跳槽。但是也有不少企业采用这种滞后型策略,主要原因是当前的资金不充裕。这种策略也并非完全不可取,它可以作为一种过渡策略,帮助企业快速成长或渡过难关。 优秀的薪酬管理者,可以从其它方面来弥补低薪的劣势,如提供具有挑战性的工作、赋予较大的权力、营造和谐共进的氛围、提供较多的培训等,应聘者和员工可能会因这些原因而愿意与企业共同成长。但是,长期的低薪一定会挫伤员工的积极性,毕竟薪酬才能满足更多的需求。因此,采用这一策略的企业,往往会用将来更具诱惑力的薪酬来留住员工,比如承诺将来工资提高到更高的水平,或是向员工发放股票等。人们可能为了将来更高的收入,而容忍当前较低的收入,所以滞后型薪酬策略可以作为一种暂时性的策略。 比如,在信息以及其他一些高科技企业中,一些企业支付给员工的基本薪酬可能会低于市场水平,但是员工却可以获得企业的股票或者是股票期权,这种将滞后型的基本薪酬策略和未来的较高收入结合在一起的薪酬组合不但不会影响企业的员工招募和保留能力,反而有助于增强员工的工作积极性和责任感。此外,这种薪酬策略还可以通过与富有挑战性的工作、理想的工作地点、良好的同事关系等其他因素相结合而得到适当的弥补。 定义相关 什么是薪酬水平 薪酬水平是指企业内部各类职位和人员平均薪酬的高低状况,它反映了企业薪酬的外部竞争性。 薪酬水平反映了企业薪酬相对于当地市场薪酬行情和竞争对手薪酬绝对值的高低。它对员工的吸引力和企业的薪酬竞争力有着直接的影响,其数学公式为:薪酬水平=薪酬总额/在业的员工人数。 [编辑]薪酬水平的调整 薪酬水平的调整是薪酬结构、等级要素、构成要素等不变,调整薪酬结构上每一等级或每一要素的数额。薪酬水平调整的依据包括市场、绩效、职位和能力等因素,可以采用其中一种依据也可以其中一种依据为主,其他为辅。 1、市场 通过市场薪酬调查,了解企业关键岗位的薪酬水平,发生偏离时及时进行调整以保持此类岗位在劳动力市场上的竞争力。这类关键岗位一般包括研发技术类人才、高级管理人才和企业特定发展阶段的稀缺人才等。 2、绩效 对于那些薪酬支付是以绩效为导向的员工,如销售类人员、生产类人员,通过绩效调薪使绩效表现与员工薪酬直接挂钩,其目的主要是奖励先进,鞭策后进。 3、职位 对于职位价值发生变化的职位要重新进行评估,从而重新归入相应的薪酬等级。另外对于职位发生变化的员工,其薪酬也要与员工的职位及管理职责挂钩。
doi:10.3969/j.issn.1671-1041.2011.03.003 基于补偿控制大滞后过程控制系统研究 孟苹苹,谢文滔 (西南石油大学,成都610500) 摘要:在工业过程控制中,传统PID控制方式用于较复杂被控对象时,在超调量与稳定性等方面都难以获得令人满意的结果。本论文以内模控制器作为研究对象,完成了内模控制器中低通滤波器的设计与Matlab仿真研究,得到了不同情形下的频率特性曲线,同时,通过与传统PID控制对比,对不同类型控制方式的特点进行了分析研究,得到了有意义的研究结论,对实际工业过程控制具有一定实用参考价值。 关键词:内模控制;大滞后过程;Matlab仿真;PID控制 中图分类号:TP273文献标志码:A Research on process control system of large time delay based on compensation control MENG Ping-ping,XIE Wen-tao (Southwest Petroleum University,Chengdu610500,China) Abstract:In industrial process control,when PID control,a traditional control model was applied to some complicated controlled objects,usually control effect is not satisfied as good as expected.In this paper,by focusing study on internal model controller,design and Matlab simulation of the low-pass filter,a very important component in the internal model controller were completed.Amplitude and frequency characteristic curve were drawn under different cases.By compared with PID in controlling characteristics,meaningful conclusions were conducted which might be applicably valuable to in-dustrial process control in practice. Key words:internal model control;great lag process;Matlab simulation;PID control 0引言 过程控制技术近年来发展迅速,特别是在计算机,网络通信和先进控制理论的带动下,过程控制的检测,执行仪表及控制系统日益向智能化方向发展[1]。 在化工、炼油、冶金等一些复杂工业过程中,广泛存在着较大的纯滞后。纯滞后往往是由于物料或能量需要经过一个传输过程而形成的,这类时间滞后系统的控制是世界公认的控制难题。由于纯滞后的存在,使得被控量不能及时地反映系统所受的扰动,从而产生明显的超调,使得控制系统的稳定性变差,调节时间延长。 传统的过程控制系统中,主要运用传统的PID控制,Smith控制,对于被控对象简单的系统,可以得到预期的效果,但是遇到大滞后的被控对象,其控制效果难以达到预定的效果,对于滞后系统,其τ/T>0.5,在这种情况下,就需要提出一种先进的PID控制器,使其在大滞后环境下,也能得到预期的控制效果。在本文中采用直流无刷电机作为被控对象[2],通过仿真说明采用内模控制的电机系统控制精度高、响应快、稳定性和鲁棒性良好。 1内模控制技术[3-4] 1.1内模控制技术简介 内模控制是在模型没有误差,而且可得到这个假设条件下的理想反馈控制。内模控制系统的典型框图如图1所示。 图1内模控制结构图 在实际工作中,模型与实际过程总会存在误差。针对上述情况,设计内模控制器时可首先将过程模型作因式分解如下: G ^ p (s)=G ^ p+ G ^ p- (1) □研究报告□仪器仪表用户 8 EIC Vol.182011No.3欢迎光临本刊网站http://www.eic.com.cn
大纯滞后在对象控制方法应用研究 摘要:针对一般工业过程中存在的大纯滞后问题,提出了一种克服大纯滞后的预测控制方法。利用递推最小二乘法进行参数估计,获得对象的一阶简化模型,提出了一种Smith预估神经元控制器设计方法,再用构建的神经网络预测模型预测出未来相应时刻的系统输出,然后用该输出来调整当前时刻的控制量,从而达到预期的控制目的,仿真结果验证了该方法的有效性。 关键词:神经网络;预测控制;大纯滞后 0 前言 一般工业过程中都具有非线性大纯滞后的特点,特别是滞后较大(即额定滞后S/T>0.5)的系统,常规控制往往无能为力。采用Smith控制是解决对象大纯滞后问题的有效方法,但它需要建立对象的精确的数学模型,而且鲁棒性和抗干扰能力较差,面向对象的神经元模型及其学习算法具有算法简单、适应性好等优点,但是对于大纯滞后过程,由于被控量的偏差不能及时反映控制量的变化影响了神经元的控制效果。 预测控制是上世纪70年代兴起的一种新控制算法,在工业上已被广泛应用,其主要思想是:在当前时刻,基于过程的动态模型预测未来一定时域内每个采样周期(或按一定间隔)的过程输出,即可以根据当前的输入预测未来多个时刻的输出,从而根据控制要求调整下一时刻的控制量,有利于对纯滞后系统的控制,将预测函数控制应用于大纯滞后温度控制系统,减少了稳态静差,但超调量偏大,要有一种具有自补偿功能的非线性预测反馈校正法,提高了系统的鲁棒性,但该方法限于纯滞后时间已知的情况下,对于纯滞后参数未知或者改变的情况未加讨论。 根据上述情况提出一种用神经网络辨识系统的滞后时间参数,用预测控制算法实现对大纯滞后对象的控制方法。其中预测模型是用神经网络逼近被控的动态对象而建立的,从而无需知道系统的精确数学模型。 1 神经元模型及控制系统 1.1神经元模型 针对将神经网络直观套用于自动控制中存在的局限性,提出了一种面向控制的神经元模型它的输出u(t)可以表示为
纯滞后环节高阶系统的内模控制及仿真 发表时间:2018-10-18T13:52:34.917Z 来源:《河南电力》2018年8期作者:尚玉廷[导读] 在快响应的电机控制中也能取得了比PID更为优越的效果。IMC设计简单、跟踪性能好、鲁棒性强,能消除不可测干扰的影响,一直为控制界所重视。37142819790721xxxx 摘要:内模控制(IMC)是80年代初提出的,由Garcia和Morari引进,其产生的背景主要有两个方面,一是为了对当时提出的两种预测控制算法MAC和DMC进行系统分析;其次是作为Smith预估器的一种扩展,使设计更为简便,鲁棒及抗扰性大为改善。内模控制器 (IMC)是内部模型控制器(Internal model controller)的简称,由控制器和滤波器两部分组成,两者对系统的作用相对独立,前者影响系统的响应性能,后者影响系统的鲁棒性。它是一种实用性很强的控制方法,其主要特点是结构简单、设计直观简便,在线调节参数少,且调整方针明确,调整容易。特别是对于鲁棒及抗扰性的改善和大时滞系统的控制,效果尤为显著。因此自从其产生以来,不仅在慢响应的过程控制中获得了大量应用,在快响应的电机控制中也能取得了比PID更为优越的效果。IMC设计简单、跟踪性能好、鲁棒性强,能消除不可测干扰的影响,一直为控制界所重视。 关键词:内模控制;IMC;鲁棒 经过十多年的发展,IMC方法不仅已扩展到了多变量和非线性系统,还产生了多种设计方法,较典型的有零极点对消法、预测控制法、针对PID控制器设计的IMC法、有限拍法等。IMC与其他控制方法的结合也是很容易的,如自适应IMC,采用模糊决策、仿人控制、神经网络的智能型IMC等.值得注意的是,目前已经证明,已成功应用于大量工业过程的各类预测控制算法本质上都属于IMC类,在其等效的IMC结构中特殊之处只是其给定输入采用了未来的超前值(预检控制系统),这不仅可以从结构上说明预测控制为何具有良好的性能,而且为其进一步的深入分析和改进提供了有力的工具。 1.内模控制基本结构及其性质 内模控制不仅在工业过程控制中获得了成功的应用,而且表现出在控制系统稳定性和鲁棒性理论分析方面的优势。在工业过程中,内模控制用于强耦合多变量过程、强非线性过程和大时滞过程。 内模控制基本结构如图1.1所示。 内模控制方法的关键是获取对象的模型逆,而相当一部分非线性系统的求逆问题可以通过微分几何方法中的动态逆的理论来解决,从而将内模控制与输入输出反馈线性化方法联系起来,而内模控制所具有的鲁棒性正好能够弥补微分几何方法的不足。 2.1 内模控制结构
先行指标、同步指标和滞后指标在实际市场操作中,对基本经济因素的分析,都是通过收集、整理和分析各国反映经济发展各个方面的经济指标(经济数字)来进行的。在当今世界,美元仍然是各国外汇储备的主要货币,因此美国的经济数字对市场影响最大,各国投资者都关注美国的经济数字,以把握投资时机。 美国政府公布的经济数字可以分为:先行指标、同步指标和滞后指标。具体包括: 1.先行指标(Leading Indicator) 先行指标是对未来的经济发展产生影响的经济指标的统计。市场分析者常参考这些指标分析未来经济发展的状况及其对今后汇率发展方向的影响。 2.同步指标和滞后指标(Concurrent Indicator and Lagging Indicator) 同步指标的变动时间与一般经济情况基本一致,滞后指标的变动时间则往往落后于一般经济情况的变动。这两类指标可以显示经济发展的总趋势,并确定或否定先行指标预示的经济发展趋势,而且通过它们还可以看出经济变化的深度。较重要的同步指标和滞后指标有: (1)国民生产总值(GDP) 国民生产总值是一国在一定时期内(年、季)以货币表示的全部产品和劳务的价值总和。它是整个国民经济的概括,是全面反映一国经济实力和经济发展程度的综合指标体系。通常美国GDP越高意味着经济发展越好,利率趋升,美元汇率趋强。 (2)失业率(Unemployment Rate) 失业率也是代表经济发展好坏的标志。失业率的上升,意味着经济受阻;失业率降低,则意味着经济发展势头增强。 (3)零售指数(Retail Sales Index) 零售指数是一个包括现金购买和信用赊购的指标,它反映社会消费状况及总体经济活动。较高的零售指数表明社会消费充分,经济发展潜力大,利率趋升,美元汇率趋升。 (4)个人消费支出(Personal Consumption Expenditures) 个人消费支出包括个人购买商品和劳务两方面的支出,是衡量居民消费支出的重要指标。 (5)工业生产指数(Industrial Production) 工业生产指数反映美国生产和制造业的总生产,通常与国家经济发展相一致。工业生产水平越高,经济发展势头越好,资本投资也更多,从而带动美元汇率上升。 (6)全国采购经理协会指数(NAPM) NAPM指数一般在每月的第一个星期一公布,反映制造业的活跃程度,常比失业率更早地显露出上个月经济活动发展变化的端倪。该指数高于50%被认为是制造业的扩张,低于50%则意味着经济的萎缩。 (7)商业库存(Business Inventory) 商业库存反映商业部门对短期信贷的需求。商业库存增加,可能带动短期利率上升,使经济发展减缓,表明经济可能进入停滞状态,严重者可能表明经济开始衰退。 (8)设备开工率(Housing Starts) 用于衡量现存的工厂和设备闲置的情况。开工率上升,预示着经济扩张的开始。通常80%的设备开工率被认为是工厂和设备的正常闲置,83%-85%以上则意味着经济面临通货膨胀的压力,利率趋升的压力也变大。 (9)工厂订单(Factory Order) 工厂订单反映了消费者、厂商或政府对未来产出的需求。 (10)住房开工率(Housing Starts) 住房开工率是衡量建筑业活跃程度的指标,而建筑业又常常是经济周期变化中的先导产业。住房开工率的上升,预示着经济趋于扩张。
典型大惯性过程的控制方法 在工业生产过程中,经常由于物料或能量的传输带来时间延迟的问题,即被控对象具有不同程度的纯滞后,不能及时反映系统所受的扰动。此外,测量信号到达控制器,即使执行机构接受信号后立即动作,也需要经过一个滞后时间才能影响到被控制量实现控制。该种类型过程必然会产生较大的超调和较长的调节时间,使过渡过程变坏,系统的稳定性降低。设τ为纯滞后时间, T 为对象的容量滞后时间,当τ/T 增加时,过程中的相位滞后增加而使超调增大,甚至会因为严重超调而出现生产安全事故。通常将纯滞后时间与过程的时间常数之比大于0. 3的过程认为是具有大滞后的过程。即: P T =T 传统的PID 控制一般不能解决过程控制上的大滞后问题,具有大滞后的过程控制被公认为是较难的控制问题,一直以来都是过程控制研究的热点。加热装置的炉温控制具有典型的时间滞后特点。 基于前人研究成果,本文对适用于大惯性过程中的典型控制算法进行总结,并适当的列举当下较为突出的相关控制策略,做出相应的说明和阐述。 一、传统控制的改进 1. 串级控制 由于系统纯延迟时间较长,而且扰动的因素多,单回路反馈控制系统不能满足控制品质的要求。为了提高控制质量,采用串级控制系统,运用副回路的快速作用,有效地提高控制质量,满足生产要求。
串级控制系统采用两套检测变送器和两个调节器,前一个调节器的输出作为后一个调节器的设定,后一个调节器的输出送往调节阀。若选择锅炉为大延迟对象,则串级控制方框图可以设计成如图1-1所示。 y 图1-1 整个系统包括两个控制回路,主回路和副回路。副回路由副变量检测变送、副调节器、调节阀和副过程构成;主回路由主变量检测变送、主调节器、副调节器、调节阀、副过程和主过程构成。 前一个调节器称为主调节器,它所检测和控制的变量称主变量(主被控参数),即工艺控制指标;后一个调节器称为副调节器,它所检测和控制的变量称副变量(副被控参数),是为了稳定主变量而引入的辅助变量。 分析可以看到:在串级控制系统中,由于引入了一个副回路,不仅能及早克服进入副回路的扰动,而且又能改善过程特性。副调节器具有“粗调”的作用,主调节器具有“细调”的作用,从而使其控制品质得到进一步提高。 2.Smith预估控制 为了解决纯延迟对象的大滞后控制问题,Smith提出了一种纯滞后补偿方法,被称为Smith预估器。该方法结构简单、概念明确,是一种得到广泛应用的时滞过程控制方案。传统的Smith预估控制方框图如图1-2所示。
绪论 在现代科学的众多领域中,纯滞后对象的控制一直是人们研究的重要课题。 早期的研究主要是运用线性系统的经典方法对纯滞后系统进行分析设计。譬如运用Nyquist法分析纯滞后系统的稳定性问题,用Pade近似方法将纯滞后环节近似为线性系统进行根轨迹的分析综合等。但总的来说,当系统滞后时间较小时,只要我们设计时给予充分的考虑就可以了。这时实际的控制效果不会与设计要求相去甚远。对于滞后时间相对较大的系统,Smith提出了预估补偿的方法,通过补偿环节来消除或减弱闭环系统中纯滞后因素的影响。只要对象的模型较精确,Smith方法的效果是比较理想的。 上世纪80年代起,随着自动控制理论、实践的深入发展和广泛应用,最优控制、鲁棒控制、变结构控制、H 控制以及预测控制等现代控制理论也逐步地应用到纯滞后的系统中来,并取得了一定的成果。 近几年来,以模糊控制技术、神经网络、专家系统和遗传算法为主要内容的智能控制技术,得到了充分的发展和广泛的应用。尤其是它与传统的控制技术相结合,成功地解决了采用传统控制技术难以控制的控制对象(特别是对象模型难定的情况),在工程应用中有着强大的生命力并得到了广泛的应用。 本文通过纯滞后工艺过程描述了纯滞后系统的特性,从这个特性可以知道被控对象大多数都有纯滞后特性。根据纯滞后控制系统的基本特点和纯滞后控制系统的设计以及纯滞后控制系统控制器参数整定等基础知识,并通过实例常规模糊控制器在纯滞后系统中的应用来理解和深化对纯滞后控制系统的理解。
1 纯滞后理论概述 1.1 纯滞后相关定义及其工艺过程 1.1.1 纯滞后相关定义 所谓纯滞后是一种时间上的延迟,这种延迟是从引起动态要素变化的时刻到输出开始变化的时刻的这一段时间。存在时间延迟的对象就称为具有纯滞后的对象,简称为纯滞后对象或滞后对象,实际被控对象大多数都有纯滞后特性。 被控对象时滞与其瞬态过程时间常数值比较大,采用通常的控制策略时,不能实现系统的精度控制,甚至会造成系统不稳定。通常认为当被控对象时滞与其瞬态过程时间常数之比大于0.3时,被控系统为纯滞后系统。滞后是过程控制系统中的重要特征,滞后可导致系统不稳定。有些系统滞后较小这时人们为了简化控制系统设计,忽略了滞后;但在滞后较大时,不能忽略,当被控对象的时滞与其瞬态过程时间常数之比大于0.3时,被控系统应按纯滞后系统设计。这类控制过程的特点是:当控制作用产生后,在滞后时间范围内,被控参数完全没有响应,使得系统不能及时随被控制量进行调整以克服系统所受的扰动。因此,这样的过程必然会产生较明显的超调量和需要较长的调节时间。所以,含有纯延迟的过程被公认为是较难控制的过程,其难控制程度随着纯滞后时间与整个过程动态时间参数的比例增加而增加。 但总的来说,当系统滞后时间较小时,只要我们设计时给予充分的考虑就可以了。对于滞后时间相对较大的系统,Smith提出了预估补偿的方法,通过补偿环节来消除或减弱闭环系统中纯滞后因素的影响。 1.1.2 纯滞后工艺过程 在工业生产过程中,极大部分工艺过程的动态特性往往是既包含一部分纯滞后特性又包括一部分惯性特性,这种工艺过程就称为具有纯滞后的工艺过程。譬如对于大型档案馆的温湿度控制,就是存在纯滞后较大的实际对象。在长沙地区,夏天的空气相对湿度一般而言是比较大的,在档案馆进行适当的除湿操作是非常有必要的,而在进行除湿动作以后,档案馆内的相对湿度要相应得到降低则需要一段时间的延迟。当然,对档案馆内温度的控制也是如此。纯滞后环节的输入输出关系(如图1-1)所示:
第一章单回路控制系统 1.1 何谓控制通道?何谓干扰通道?它们的特性对控制系统质量有什么影响? 控制通道——是指操纵变量与被控变量之间的信号联系; 干扰通道——是指干扰作用与被控变量之间的信号联系。 (1)控制通道特性对系统控制质量的影响:(从K、T、τ三方面) 控制通道静态放大倍数越大,系统灵敏度越高,余差越小。但随着静态放大倍数的增大,系统的稳定性变差。 控制通道时间常数越大,经过的容量数越多,系统的工作频率越低,控制越不及时,过渡过程时间越长,系统的质量越低,但也不是越小越好,太小会使系统的稳定性下降,因此应该适当小一些。 控制通道纯滞后的存在不仅使系统控制不及时,使动态偏差增大,而且还还会使系统的稳定性降低。 (2)干扰通道特性对系统控制质量的影响:(从K、T、τ三方面) 干扰通道放大倍数越大,系统的余差也越大,即控制质量越差。 干扰通道时间常数越大,阶数越高,或者说干扰进入系统的位置越远离被控变量测量点而靠近控制阀,干扰对被控变量的影响越小,系统的质量则越高。 干扰通道有无纯滞后对质量无影响,不同的只是干扰对被控变量的影响向后推迟一个纯滞后时间τ0。 1.2 如何选择操纵变量? 1)考虑工艺的合理性和可实现性; 2)控制通道静态放大倍数大于干扰通道静态放大倍数; 3)控制通道时间常数应适当小些为好,但不易过小,一般要求小于干扰通道时间常数。干扰动通道时间常数越大越好,阶数越高越好。 4)控制通道纯滞后越小越好。 1.3 控制器的比例度δ变化对控制系统的控制精度有何影响?对控制系统的动态质量有何影响? 比例度δ越小,系统灵敏度越高,余差越小。随着δ减小,系统的稳定性下降。 1.5图1-42为一蒸汽加热设备,利用蒸汽将物料加热到所需温度后排出。试问:影响物料出口温度的 主要因素有哪些?如果要设计一温度控制系统,你认为被控变量与操纵变量应选谁?为什么?如果物 料在温度过低时会凝结,应如何选择控制阀的开闭形式及控制器的正反作用? 答:影响物料出口温度的因素主要有蒸汽的流量和温度、搅拌器的搅拌速度、物料的流量和入口温度。 被控变量应选择物料的出口温度,操纵变量应选择蒸汽流量。物料的出口温度是工艺要求的直接质量 指标,测试技术成熟、成本低,应当选作被控变量。可选作操纵变量的因数有两个:蒸汽流量、物料 流量。后者工艺不合理,因而只能选蒸汽流量作为操纵变量。控制阀应选择气关阀,控制器选择正作用。 1.6 图1-43为热交换器出口温度控制系统,要求确定在下面不同情况下控制阀的开闭形式及控制器的正反作用: 被加热物料在温度过高时会发生分解、自聚; 被加热物料在温度过低时会发生凝结; 如果操纵变量为冷却水流量,该地区最低温度 在0℃以下,如何防止热交换器被冻坏。 答:控制阀选气开阀,选反作用控制器。 控制阀选气关阀,选正作用控制器。 控制阀选气关阀,选反作用控制器。 1.7 单回路系统方块图如图1-44所示。试问当系统中某组成环节的参数发生变化时,系统质量会有何变化?为什么? (1)若T0增大;(2)若τ0增大;(3)若Tf增大;(4) 若τf增大。 答:(1)T0 增大,控制通道时间常数增大,会使系统的工作频 率降低,控制质量变差; (2)τ0 增大,控制通道的纯滞后时间增大,会使系统控制不 及时,动态偏差增大,过渡过程时间加长。 (3)Tf 增大,超调量缩小1/Tf倍,有利于提高控制系统质量; (4)τ f 增大对系统质量无影响,当有纯滞后时,干扰对被控 变量的影响向后推迟了一个纯滞后时间τ f 。 第二章串级控制系统 2.1 与单回路系统相比,串级控制系统有些什么特点? (1) 串级系统由于副回路的存在, 使等效副对象时间常数减小,改善了对象的特性,使系统工作频率提高。