学号: 密级: 武汉东湖学院本科生毕业论文(设计) 三自由度并联机械手的设计 院(系)名称:机电工程学院 专业名称:机械设计制造及其自动化 学生姓名: 指导教师: 二〇一六年五月六日
郑重声明 我郑重声明:本人恪守学术道德,崇尚严谨学风,所呈交的学术论文是本人在老师的指导下,独立进行研究工作所取得的结果。除文中明确注明和引用的内容外,本论文不包含任何他人已经发表和撰写过得内容。论文为本人亲自撰写,并对所写内容负责。 本人签名: 日期:2016年5月7号
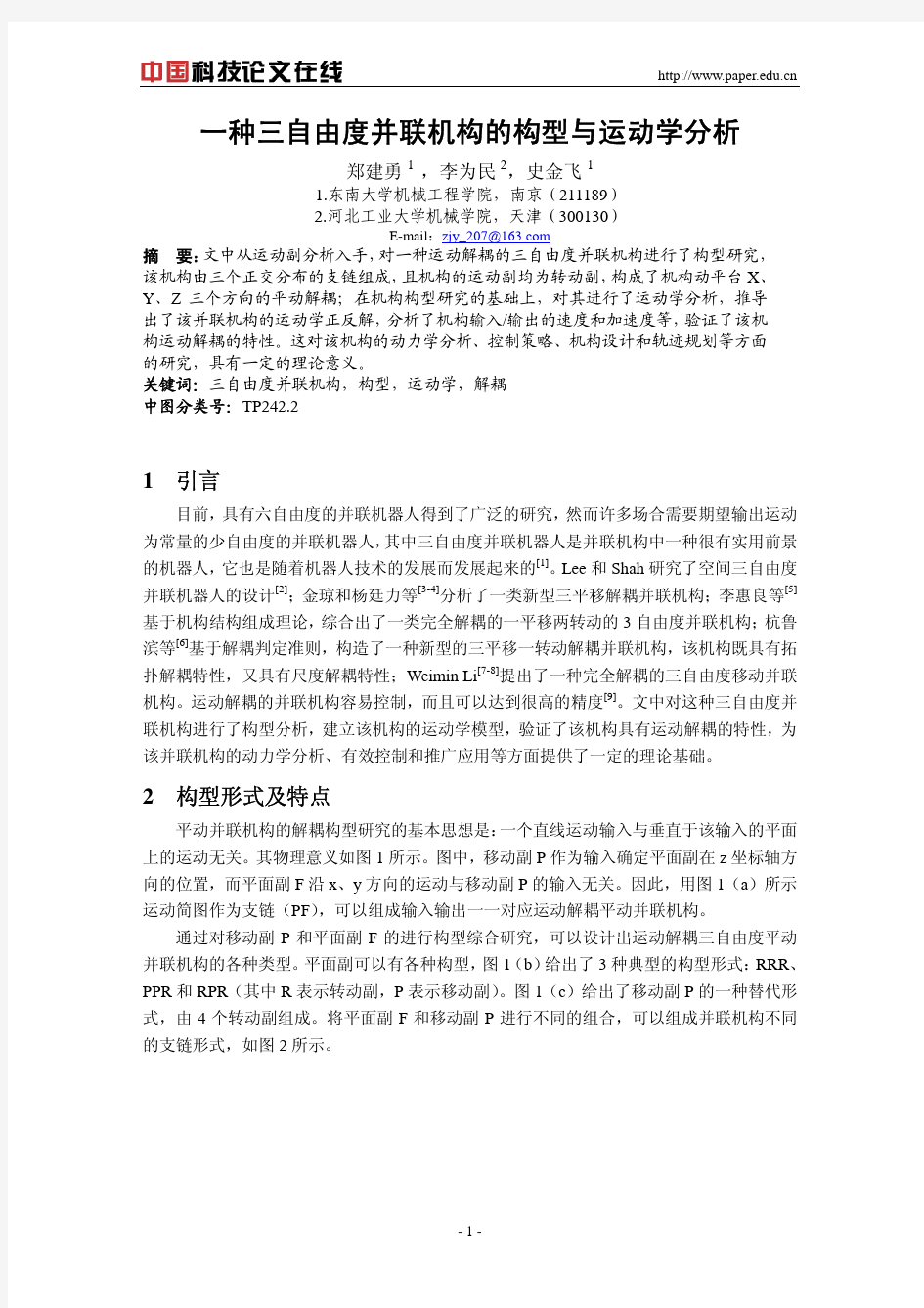
摘要 随着机器人技术的快速发展,并联机械手的应用领域越来越广,已成为当今机器人领域新的研究热点。针对并联机械手机构比传统串联机械手更复杂的问题,本文以一种轻型高速的三自由度Delta 并联机械手为例,在完成其运动学的基础上,对并联机械手进行了建模以及装配。 首先,本文介绍了三自由度并联机械手机构的工作原理,并对其进行了运动学分析。其中,对机构的自由度进行的计算,采用几何法求得了其运动学正解以及其运动学逆解。其次,对机构进行了速度模型及雅克比矩阵的分析。实现了solidworks对机构的零部件与装配图三维建模。最后,通过个零部件的配合,实现了三自由度并联机械手的装配。 关键词:并联机械手;三自由度;3D建模
ABSTRACT With the rapid development of robot technology, parallel manipulator used more and more widely, has become the hot spot in the field of new robots today. In view of the parallel manipulator mechanism more complex than the traditional serial manipulator problem, based on a lightweight high-speed three degree of freedom parallel manipulator as an example, the Delta at the completion of its kinematics, on the basis of the parallel manipulator has carried on the modeling and assembly. First, this paper introduces the working principle of three degrees of freedom parallel manipulator mechanism, and carries on the kinematics analysis. Among them, the institution of degree of freedom for the calculation of geometric method is used to obtain the positive kinematics solution and its inverse kinematics solution. Second, the institutions for the velocity model and the Jacobi matrix analysis. Implements the solidworks for spare parts and assembly drawing 3 d modeling of the organization. Finally, by a spare parts, implements the three degree of freedom parallel manipulator assembly. Keywords: Parallel manipulator;Three degrees of freedom;3D modeling
平面2自由度并联机器人的运动学 和动力学研究 林协源1刘冠峰1 (1.广东工业大学广州) 摘要:本文面向高速高精LED电子封装设备设计了一种高速高精2自由度平面并联机构(2-PPa并联机器人)。该机构由一个动平台和两个对称分布的完全相同的支链组成,每个支链中都有一个移动副(驱动关节)和一个由平面平行四边形组成的特殊转动动副。首先推导出该机器人的运动学模型包括正反解;其次结合焊线机实际工艺要求提出多项机构性能指标对该机构的几何参数进行多目标优化;然后基于Euler-Lagrange 方程建立该机器人的动力学方程,最后通过算例分析两个移动副在动平台按照一定轨迹运动时其速度、加速度和驱动力的变化规律。这些为接下来研究该机器人的动态性能和系统解耦控制等都具有重要意义。 关键词:2自由度平面并联机器人运动学动力学 Kinematic and Dynamic Analysis of a Planar Two-degree-freedom Parallel Manipulator LIN Xieyuan1LIU Guanfeng1 (1.Guangdong University of Technology Guangzhou ) Abstract:In this paper,a type of planar 2-DOF parallel manipulator is proposed for uses in design of high- speed and high-accuracy LED packaging machines. The manipulator consists of a moving platform and two identical subchains. Each subchain is made of a prismatic joint (actuator) and a parallelogram with four passive revolute joints. We first derive the kinematic model of the manipulator. Then, we determine the optimal geometric parameters of the manipulator by solving a multi-goal optimization problem based on performance indices. We compute the dynamic equation use Euler-Lagrange formulation and use it to analyze the relationship between velocity, acceleration and driving torque of joints. This analysis is important for further study of the dynamic performance and the decoupling control methods for the manipulator. Key words:2-DOF Planar parallel manipulator Kinematics Dynamics 0 前言 在电子、包装和食品等轻工业场合中,机器人只需要3到4个自由度即可满足使用要求。串联机器人由于自身具有较大的质量和惯性,很难应用到需要高速高负载能力的场合。并联机器人很好的弥补了串联机器人这方面的不足。所以,近年来少自由度并联机器人的研究相当热门。其中3自由度并联机器人的研究已是相当深入[1-4]。在Z方向只需要较小的操作位移时,末端搭载一个1或2自由度的串联机构的2自由度并联机器人相对应3或4自由度的并联机器人会显得更加经济适用。 清华大学曽提出过两种平面2-DOF并联机器人:一种是PRRRP(P表示移动副,R 表示转动副)并联机器人,其中两移动副运动方向平行,且机器人的末端姿态是可变的[5];一种是2-PPa(Pa表示平行四边形机构)并联机器人,同样,该机器人的移动副运动方向也平行,不过其末端姿态不可变[6]。文章[6]中的并联机器人最后应用在了立式机床上。同样的2-PPa并联机器人,上海交通大学将其应用在高速高精度的场合
三自由度3-CS并联平台机构的运动学分析 于靖军;毕树生;宗光华;黄真 【期刊名称】《航空学报》 【年(卷),期】2001(022)003 【摘要】With the development of parallel mechanisms research, spatial imperfect-DOF parallel mechanisms especially some constrained 3-DOF parallel mechanisms have received more attention for the advantages of their simple structure, easy control and low cost. In this paper, a novel model of constrained 3-DOF parallel manipulator—3-CS in-parallel platform mechanism is introduced firstly. The instantaneous possible motion characteristics for this mechanism are analyzed in detail by applying the screw theory. In addition, the first order kinematic analysis of the 3-CS mechanism is discussed thoroughly, which involves deriving three motion constraint equations for the output motions of the manipulator and formulating the kinematic influence matrix (also called Jacobian of the mechanism) reflecting the velocity relationship between three independent input motions and three independent output motions in a closed form. At last, the closed-form solutions are developed for both the inverse and forward position kinematics.%首先介绍了一种新型的并联机构——三自由度3-CS并联平台机构的模型。应用螺旋理论分析了该机构的瞬时运动。同时对该机构进行了运动学分析:给出了操作平台的输出运动参数的3个运动约束方程和3个独立输出运动参数与3个独
河北工业大学城市学院 毕业论文 作者:周** 学号:***** 系(专业):机械系 专业:机械设计与制造及其自动化 题目:全转动副三自由度并联机器人 指导者:李** 教授 (姓名) (专业技术职务) 评阅者: (姓名) (专业技术职务) 2015 年6月11 日
目录 1 绪论 ........................................................................................................................ - 4 - 1.1 引言 .............................................................................................................. - 4 - 1.2 此次课题研究背景和意义 ........................................................................ - 4 - 1.3 串并联机器人的国内外研究现状、使用范围及发展趋势 ...................... - 5 - 1. 4 本次毕业设计主要完成工作 ..................................................................... - 6 - 1.4.1 基本内容 ............................................................................................ - 6 - 1.4.2 课题研究拟采用的手段和工作路线 ................................................ - 6 - 2 总体方案的设计 .................................................................................................... - 7 - 2.1 总体布局的设计 ....................................................................................... - 7 - 3 由基本参数选定标准件的型号 .......................................................................... - 10 - 3.1 减速机的选择 .......................................................................................... - 10 - 3.2 选择伺服电机并对其检验 ...................................................................... - 12 - 3.3 轴承的选择及校核 .................................................................................... - 15 - 3.4 联轴器的选择 .......................................................................................... - 17 - 4.1 支链尺寸的确定 ........................................................................................ - 19 - 4.2 对主动轴尺寸的确定及校核 .................................................................... - 20 - 4.3 对支链上转动副的设计 ............................................................................ - 22 - 4.4 支链末端设计 ............................................................................................ - 25 - 5 机构的整体布局设计及机架设计 ...................................................................... - 2 6 - 结论 ...................................................................................................................... - 29 - 参考文献 .................................................................................................................... - 31 - 致谢 ............................................................................................................................ - 32 -
并联机构运动学能分析与优化动力学
分类号:TH113.2+2 密级:公开 U D C:单位代码:10424 工程硕士学位论文 4-UPS-RPS并联机构运动学性能 分析与优化 孙先洋 申请学位级别:硕士学位领域名称:机械工程 指导教师姓名:陈修龙职称:副教授 副指导教师姓名:朱苏宁职称:高级工程师 山东科技大学 二零一三年五月
论文题目: 4-UPS-RPS并联机构运动学性能分析与优化 作者姓名:孙先洋入学时间:2011年9月 领域名称:机械工程研究方向:先进设计与制造技术 指导教师:陈修龙职称:副教授 副指导教师:朱苏宁职称:高级工程师 论文提交日期:2013年5月 论文答辩日期:2013年6月8日 授予学位日期:
KINEMATICS PERFORMANCE ANALYSIS AND OPTIMIZATION OF 4-UPS-RPS PMT A Dissertation submitted in fulfillment of the requirements of the degree of MASTER OF ENGINEERING from Shandong University of Science and Technology by Sun Xianyang Supervisor: Associate Professor Chen Xiulong College of Mechanical and Electronic Engineering May 2013
声明 本人呈交给山东科技大学的这篇工程硕士学位论文,除了所列参考文献和世所公认的文献外,全部是本人在导师指导下的研究成果。该论文资料尚没有呈交于其它任何学术机关作鉴定。 硕士生签名: 日期: AFFIRMATION I declare that this dissertation, submitted in fulfillment of the requirements for the award of Master of Engineering in Shandong University of Science and Technology, is wholly my own work unless referenced of acknowledge. The document has not been submitted for qualification at any other academic institute. Signature: Date:
对四自由度并联机构分析 摘要:并联机构(Parallel Mechanism,简称PM),可以定义为动平台和定平台通过至少两个独立的运动链相连接,机构具有两个或两个以上自由度,且以并联方式驱动的一种闭环机构。机构有串联机构,并联机构,各有其优缺点. 关键词:并联机构;四自由度;分析 Analysis of a novel four -degree -of -freedom parallel mechanism Abstract:Parallel Mechanism is usually called for short PM, which can be defined as the mobile platform and the platform through at least two independent movements of the chain that can be connected. Agencies have series mechanisms, parallel mechanism, each have its advantages and disadvantages. Keywords:parallel manipulator; 4 –DOF;analysis 并联机构比起传统的串联机器人机构具有更高的刚度,更好的精度和承载能力,被广泛应用到航天器对接装置、雷达定向装置以及虚拟轴高速并联机床等领域,尤其是少自由度并联机器人机构还具有结构简单、控制方便等优点,被很多研究者关注,不断提出各种新型少自由度并联机器人机构并开展相应分析,在这些并联机构中,连接上下平台的支链主要为传统的串联支链, 由于杆长约束因素, 工作空间较小,无法满足一些特种机器人工作空间大、结构紧凑的要求. 由于平行四边形机构具有较好的缩放特性,有学者将其运用到并联机器人机构的结构综合中, Bruno和Jungw on等利用该机构设计了能够获得大工作空间的机器人操作平台, Nao -hi ro Hara将其应用在飞行机器人的机翼上改善了144%的升力, Grigore Gogu运用该机构设计出了一系列的各向同性的机器人机构, S bastien Briot设计了具有承载能力大、水平和垂直方向具有独立运动的机器人机构。 本文作者利用平行四边形及其特殊形状—菱形,演绎出具有大缩放比的平行四边形机构支链和菱形机构支链, 通过用菱形机构虚拟轴代替传统串联支链实轴的方法, 提出一种具有结构紧凑、工作空间大的新型四自由度并联机器人机构, 利用螺旋理论对该机构进行了自由度分析。 1 菱形机构设计 如图 1 所示,当菱形在运动变形过程中, 同一条虚直线上的各点只有沿直线方向上的相对运动. 取一个菱形, 如图 2 所示, 将其顶点用转动副连接, 则此菱
( 需微要信 swan165 本科毕业设计说明书 题 目:六自由度伸缩式并联机床结构设计 学生姓名: 学 院:机械学院 系 别:机械系 专 业:机械电子工程 班 级:机电10-4班 指导教师:讲师
摘红字要 并联系联机微床信,也可叫获取做整套并联结构机床(Parallel Structured Machine Tools)、虚拟轴机床(Virtual Axis Machine Tools),曾经被称为六条腿机床、六足虫(Hexapods)。并联机床是近年来国内外机床研究的方向,它具有多自由度、刚度高、精度高、传动链短、制造成本低等优点。但其也不足之处,其中位置正解复杂就是关键的一条。6-THRT伸缩式并联机床是Stewart 机床的一种变形结构形式,它主要构成是运动和静止的两个平台上的6个关节点分别分布在同一个平面上,且构成的形状相似。 并联机床是一种气动机械,集气(液),在一个典型的机电一体化设备的控制技术,它是很容易实现“六轴联动”,在第二十一世纪将成为主要的高速数控加工设备。本次毕业设计题目结合本院实验室现有的六自由度并联机床机构进行设计,使其能根据工艺要求进行加工。提高学生的工程素质、创新能力、综合实践及应用能力。 此次毕业设计的主要内容是对并联机床结构设计,其内容主要包括机器人结构设计总体方案的确定,机器人机构设计的相关计算,以及滚珠丝杠螺母副、步进电机、滚动轴承、联轴器等主要零部件的计算选用,并利用CAXA软件绘制各相关零部件的零件图和总装配图,以期达到能直观看出并联机床实体机构的效果。 关键词:并联机床;步进电动机;空间变换矩阵;滚珠丝杠螺母副
试验研究现代制造工程2008年第3期 6/6 S PS型Ste wart并联机构运动学正解的研究* 周辉,曹毅 (江南大学机械工程学院,无锡214122) 摘要:对具有半对称结构的6/6 SPS型S te w art并联机构的运动学正解进行了研究。建立了一类具有半对称结构的6/6 SPS型S te w art并联机构运动学正解的数学模型,构造了一个关于该并联机构动平台位置参数及姿态参数的多元多项式方程组。基于该方程组并采用M athe m atica符号计算软件,编制了基于M athe m atica语言的6/6 SPS型Stewa rt并联机构运动学正解的求解程序,计算结果表明,对于任意给定的该并联机构的结构参数以及六个驱动杆杆长,该类6/6 SPS型Stew art并联机构的运动学正解在复数域内最多有28组解析解。并联机构运动学正解的研究为该类并联机构的工作空间分析、轨迹规划及控制奠定了重要的理论基础。 关键词:Ste w art机构;运动学正解;符号计算;M a t he m atica软件 中图分类号:TP242.2 文献标识码:A 文章编号:1671 3133(2008)03 0001 05 D irect kinem atics anal ysis of a speci a l class of the6/6 SPS Ste w artm ani pul ators Zhou H u,i Cao Y i (School ofM echan ica lEng i n eeri n g,Jiangnan Un i v ersity,W ux i214122,Jiangsu,CHN) Abstrac t:A ddresses t he direct kinem ati cs of a spec i a l c l ass of the6/6 SPS Ste w art m ani pulators i n wh i ch the mov i ng and base p l a tfor m s are t w o si m ilar sem isymm etr i ca l hex agons.A fte r proposi ng a m athe m atica lm ode l o f the d irect k i ne m atics of t h i s special class o f t he Ste w art m an i pu lators,a m ulti v ariate po lyno m ial equati ons se t i n the m oving p l atfor m pos iti on para m eters and or i enta ti on para m eters is constructed i n wh ich i npu t para m ete rs are geo m etric para m eters and the li nk length o f each li m b of t h is special class o f the6/6 SPS S te w art m an i pu lators.Based on t h ism ultivar i ate polynom ia l equa tions se t,an a l go rith m has been deve l oped inM a t he m a tica l anguag e for so lv i ng the d i rect k i ne m atics of t h is specia l c lass o f the6/6 SP S Stew artm anipulators by utilizi ng a sy m bo li c computati on so ft w are M athem ati ca,co m puta tion results first sho w tha t t he m ax i m u m number of the co m plete analytical so l uti on to t he direct k i ne m atic prob l em of t h is spec i a l class of t he6/6 SPS Stewart m an i pulators is up t o28i n the co m plex do m ain for any g i ven set of geo m etric para m eters and si x g iven li nk leng t hs o f the man i pu l a t o r cons i dered.D irec t k i ne m atic analysis o f th i s special c lass o f t he6/6 SPS Stewart m an i pu l a tors paves under l y i ng theoretical g rounds for the wo rkspace ana l y si s,pa t h p l ann i ng and contro l o f th i s specia l c lass o f the6/6 SPS S te w art m an i pu l a tors. K ey word s:Stewart m ani pulator;D irect kinem ati cs;Symbo lic co m putation;M athem ati ca so ft w are 0 引言 S te w art平台具有承载能力强、刚度好、无积累误差、精度高、系统动态响应快等特点[1],在飞行模拟器、机器人、新型机床等领域得到广泛应用。机器人运动学正解的研究在机器人机构学的研究中具有重要的地位,特别是对并联机器人机构,运动学正解问题一直是研究的难点和热点之一。国内外诸多学者分别采用数值法、解析法等对并联机构的运动学正解问题进行深入细致的研究[2 19]。但是,不难发现这些研究均是针对具有特殊结构形式的并联机器人机构,而对具有一般结构形式的6/6 SPS型S te w art并联机构的运动学正解,仅有少数学者进行了研究。 本文对具有半对称结构的6/6 SPS型S te w art并联机构的运动学正解进行了研究。建立了一类具有半对称结构的6/6 SPS型Ste w art并联机构运动学正 1 *国家自然科学基金资助项目(50275129);江南大学博士基金资助项目(207000-21050616)
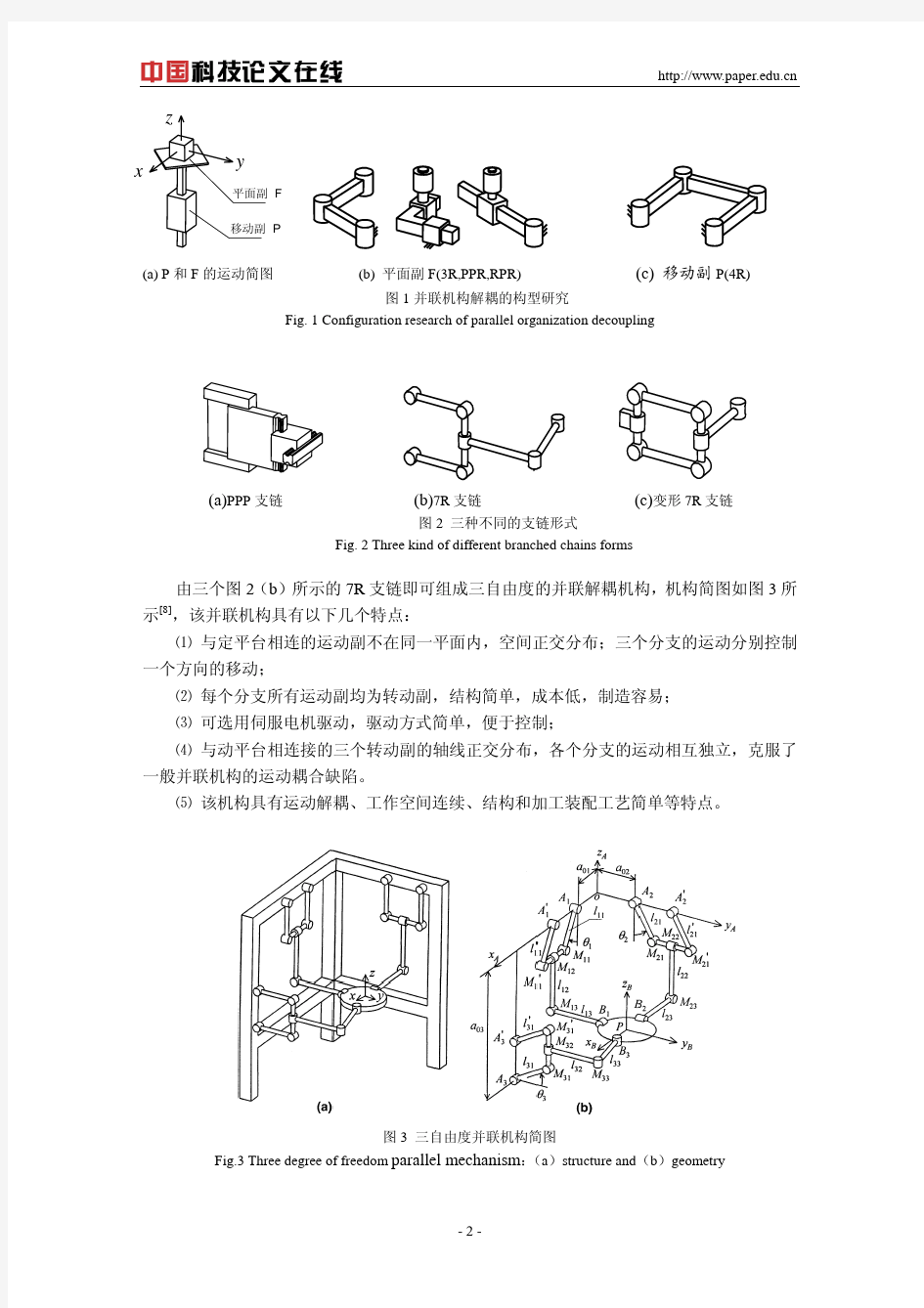
一种三自由度并联机器人运动轨迹精度的可靠性研究六 口李兵 口张晓瑾 口谢里阳口魏玉兰 东北大学机械工程与自动化学院沈阳 110004 摘要:机器人轨迹精度的可靠性是评价机构性能的重要参数。压电材料作为一种驱动器能够抑制机器人柔性连接杆的振动,在抑制振动的同时也提高了机器人运动轨迹的精度。首先介绍了一种三自由度平面并联机器人系统;其次表达了振动控制系统的工作原理和实验分析;然后分别表达了不考虑振动和考虑振动因素时机器人轨迹精度的可靠度计算方法;最后分析了无振动控制和有振动控制时机器人运动轨迹精度的可靠度。可靠度计算表明,振动控制系统能够提高机器人运动轨迹精度的可靠度。 关键词:并联机器人减振轨迹精度可靠性中图分类号:TP242 0328 文献标识码:A文章编号:1000一4998(2010)lO—O005一04 Abstract:Thereliabilityofthetrajectoryaccuracyofthemnipulator is an imponant p啪meter toevaluatethe perfomance of tIle m粕ipulator.ThevibmtionoftIlenexiblelinkIge8ofthem肌ipulatorc锄besuppressedwhenthepiezoelectricmaterialisu鸵d 鹊a咖sducer. Andthe kine啪tic trajectoryaccuracyofthem锄ipulatorisimproved at the s舢e time. Athree—degree—of— f}eedom pl衄盯paraUelrnanipulatori8 in删uced first.Thentheworkingprincipleandexperimentalanalysisofthevibration suppression8ystema聆pre鸵med.Thecalculatingmethodsofthereliabilityofthet阳jectoryaccuracyof山e毗njpulator with or withoutvibmtionfactorcorIside陀d are alsoprovided.Finally,tlIe陀liabilityofkinematict陋jectory∞curacyofIhe mIlipIllator with or without、ribmtionsupp陀ssion is锄lyzed.The resultsshowthatthereliabilityofthekinematic tmjectoryaccumcyofthe 眦nipulator can beimpmvedwit}Ithehelpofvibmtionsuppres8ion. Key words:Par棚elMaIIipIllatorVmmti帅Su坤re辎i伽TrajectoryAc饥ncyReIiability 并联机器人具有刚度大、运动精度高等优点而被广泛使用在航天工业和制造业中…。为了获得更高的运动速度和加速度,轻质量连接杆的机器人被使用,但同时却造成了系统振动,影响了运动精度。 多种方法可以抑制柔性杆的振动,例如选用刚性或阻尼更大的材料【2.”。近十几年,利用智能结构抑制柔性系统的振动被越来越重视,一个智能结构包含4个要素:驱动器、传感器、控制策略和动力控制装置。压电材料能被作为智能驱动器和传感器,PzT压电材料要求更低的驱动电压,并可使用在更大的频率范围而被广泛使用¨】。多种控制策略能实现柔性连接杆的动态振动抑制,其中应变反馈控制策略具有更宽的动态阻尼频率区域,能实现更大范围的振动抑制”】。 机器人在运动过程中产生的振动会影响其运动轨迹的精度№1。振动越强,运动轨迹精度越差,若振动幅度超过规定值就认为机器人动态性能失效,即意味着机器人不能按照预定的轨迹运动。当使用PzT振动控制系统后,能明显抑制机器人的振动,提高运动轨迹精度。机器人运动轨迹精度可靠性研究的主要任务是评价机器人运动可靠度及其机构动态精度,对机器人的 ★国家863高技术研究发展计划项目(编号:2007AA042428)科技部重大专项资助项目(编号:2009zx04013)收稿日期:2010年4月 器 机械制造48卷第554期 运动精度作出合理的可靠性预计。因此,机器人运动轨迹精度的可靠性研究具有重要的意义。 1机器人模型 如图1,这种三自由度(3一DOF)并联机器人由3个对称布置的连接杆以封闭形式组成,每一组连接杆机构都由一个直线位移约束和两个转动约束组成n1。机器人使用了比较轻的连接杆,能够获得更快的运动速度和加速度,但系统却产生了振动,而且使运动轨迹的精度降低。 机器人的系统坐标系,如图2所示,其中标出了连 20lO/lO 囤 万方数据
第5章空间机构自由度分析的约束螺旋求解法对机构最基本的认识是要知道它的自由度,机构的自由度计算原本是一个简单的问题,用传统的Kutzbach-Grübler公式[1-3]就可以获得正确的结果,而且仅仅基于算术运算。这个最基本的问 题几乎在所有的教科书上都有论述。 这里为什么还要论及呢?在机构学的发展历程中,发现了不少的机构不符合上述公式[4-5]。这种情况长期来倒还能容忍,到底当时该公式对于绝大多数机构还是适用的,特别是适用于众多的平面机构。但是在近十年来当空间机构研究迅速发展时,问题变得突出起来,传统的大家熟悉的这个公式常常算不出正确的结果,特别是在新世纪开始前后的这十年间,国际机构学界开展了少自由度并联机器人新机构的研究,这个不为人们重视的自由度计算却经常让人们迷惑,用公式常常不能够得到正确的结果。甚至到了新世纪的2002年,美国马里兰大学的Tsai教授在分析他发明一种3自由度并联机构时再次指出,如果用Kutzbach-Grübler公式计算该机构的自由 度数将会得到错误的结果[6]。这样,人们不得不采取其它麻烦的分析方法[7-11],多花费了很多的时间。究其原因,认识到这是由于在机构中存在过约束(overconstrained)的缘故,约束被重复 计算了。许多人不断寻找新的普遍适用的机构的自由度计算公式,仅举文献[12-13]。人们提出过许多新概念,包括公共约束、虚约束等等。文献[14,15]还建议自由度公式中应采用机构螺旋系的“阶”。在这方面国内也有许多学者进行了有意义的研究,文献[16]以闭合约束数定义公共约束以确定阶,文献[17]以非线性代数方程组的相关性来判定机构的“秩”,然而他却是一个十分困难的求解问题。考虑“过约束”去对Kutzbach-Grübler公式加以修正,关键是如何分析过约 束,到这个新世纪开始,这个问题在国际上一直未能解决。还有一些学者甚至还采取如李代数和群论[18-20]等现代数学来探讨,也取得了一些进展。然而,李代数和群论的应用本身到更加使人感到迷茫,难道处理这种机构学中最基本最常见的问题,非得用这些普通科技人员很难懂的高深的现代数学吗?如果真是那样,将来也是难以推广应用,也不利于科技的发展。确实,自由度分析首先应保证正确,还特别要求尽可能的简单。 本文应用螺旋理论来处理这个问题,表现的比较简单。当黄真在1991年出版的著作[21]中就提出以反螺旋重新定义公共约束,进行了四杆机构的自由度的计算。这样的定义使公共约束有了明确的物理概念,便于计算,而且还方便地确定机构的阶。在1997年出版的专著[22]中进一步集中讨论了机构的自由度计算问题。除了以反螺旋定义公共约束外,特别是研究了在构成并联机构时出现的冗余约束,并分析了许多不同阶的过约束机构。在后来的许多关于少自由度新机型的研究中都应用了这个自由度的判别方法。最后文献[23]又归纳形成完整的“基于约束螺旋的求解自由度的新方法”。这个方法的特点在于它仅仅基于螺旋理论中的最简单部分,具有线性代数基础的科技人员都不难掌握,分析过程又简单、快捷。本章就介绍这种基于约束螺旋求解自由度的新方法。在只需要一只铅笔、一张纸,绝大多数情况下花费几分钟就能得到正确的答案。这种方法对广大的机械工程师将非常适用。本章最后还介绍机构实现确定运动的条件,讨 1 ··
并联机器人发展现状与展望 引言 并联机器人是一类全新的机器人,它具有刚度大、承载能力强、误差小、精度高、自重负荷比小、动力性能好、控制容易等一系列优点,在21世纪将有广阔的发展前景。本文根据掌握的大量并联机器人文献,对其分类和应用做了简要分析和概括,并对其在运动学、动力学、机构性能分析等方面的主要研究成果、进展以及尚未解决的问题进行了阐述。 1并联机构的发展概况 (一)并联机构的特点 并联机构是一种闭环机构,其动平台或称末端执行器通过至少2个独立的运动链与机架相联接,必备的要素如下:①末端执行器必须具有运动自由度;②这种末端执行器通过几个相互关联的运动链或分支与机架相联接;③每个分支或运动链由惟一的移动副或转动副驱动。 与传统的串联机构相比,并联机构的零部件数目较串联构造平台大幅减少,主要由滚珠丝杠、伸缩杆件、滑块构件、虎克铰、球铰、伺服电机等通用组件组成。这些通用组件可由专门厂家生产,因而其制造和库存备件成本比相同功能的传统机构低得多,容易组装和模块化。 除了在结构上的优点,并联机构在实际应用中更是有串联机构不可比拟的优势。其主要优点如下: (1)刚度质量比大。因采用并联闭环杆系,杆系理论上只承受拉、压载荷,是典型的二力杆,并且多杆受力,使得传动机构具有很高的承载强度。 (2)动态性能优越。运动部件质量轻,惯性低,可有效改善伺服控制器的动态性能,使动平台获得很高的进给速度与加速度,适于高速数控作业。 (3)运动精度高。这是与传统串联机构相比而言的,传统串联机构的加工误差是各个关节的误差积累,而并联机构各个关节的误差可以相互抵消、相互弥补,因此,并联机构是未来机床的发展方向。 (4)多功能灵活性强。可构成形式多样的布局和自由度组合,在动平台上安装刀具进行多坐标铣、磨、钻、特种曲面加工等,也可安装夹具进行复杂的空间装配,适应性强,是柔性化的理想机构。 (5)使用寿命长。由于受力结构合理,运动部件磨损小,且没有导轨,不存在铁屑或冷却液进入导轨内部而导致其划伤、磨损或锈蚀现象。 并联机构作为一种新型机构,也有其自身的不足,由于结构的原因,它的运动空间较小,而串并联机构则弥补了并联机构的不足,它既有质量轻,刚度大,精度高的特点,又增大了机构的工作空间,因此具有很好的应用前景,尤其是少自由度串并联机构,适应能力强,且易于控制,是当前应用研究中的一个新热点。 (二)并联机构的分类 从运动形式来看,并联机构可分为平面机构和空间机构;细分可分为平面移动机构、平面移动转动机构、空间纯移动机构、空间纯转动机构和空间混合运动机构, 另可按并联机构的自由度数分类: