用REFLEXW软件将两个数据接在一起
先用Reflex软件把两个数据调入到两个文件夹中,假设用A1保存第一个数据,用A2保存第二个数据。
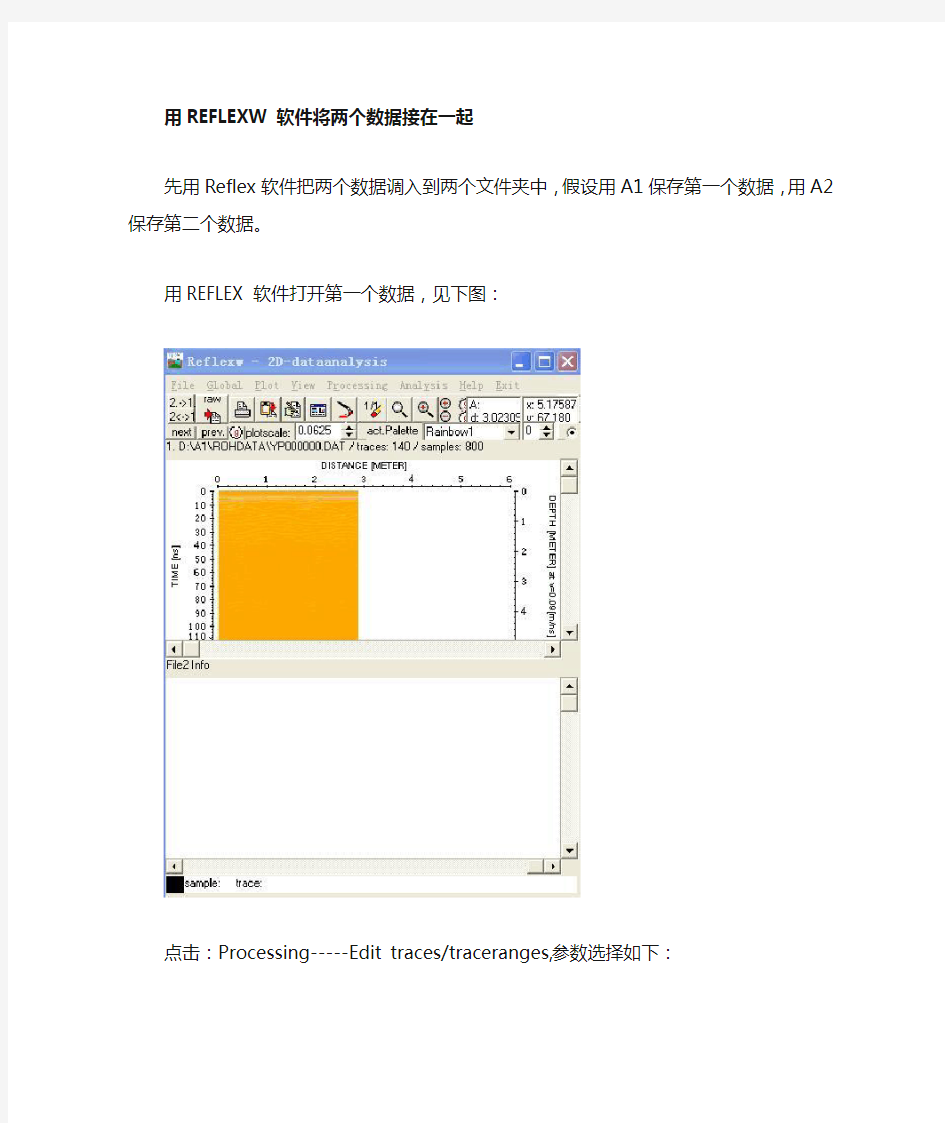
用REFLEX软件打开第一个数据,见下图:
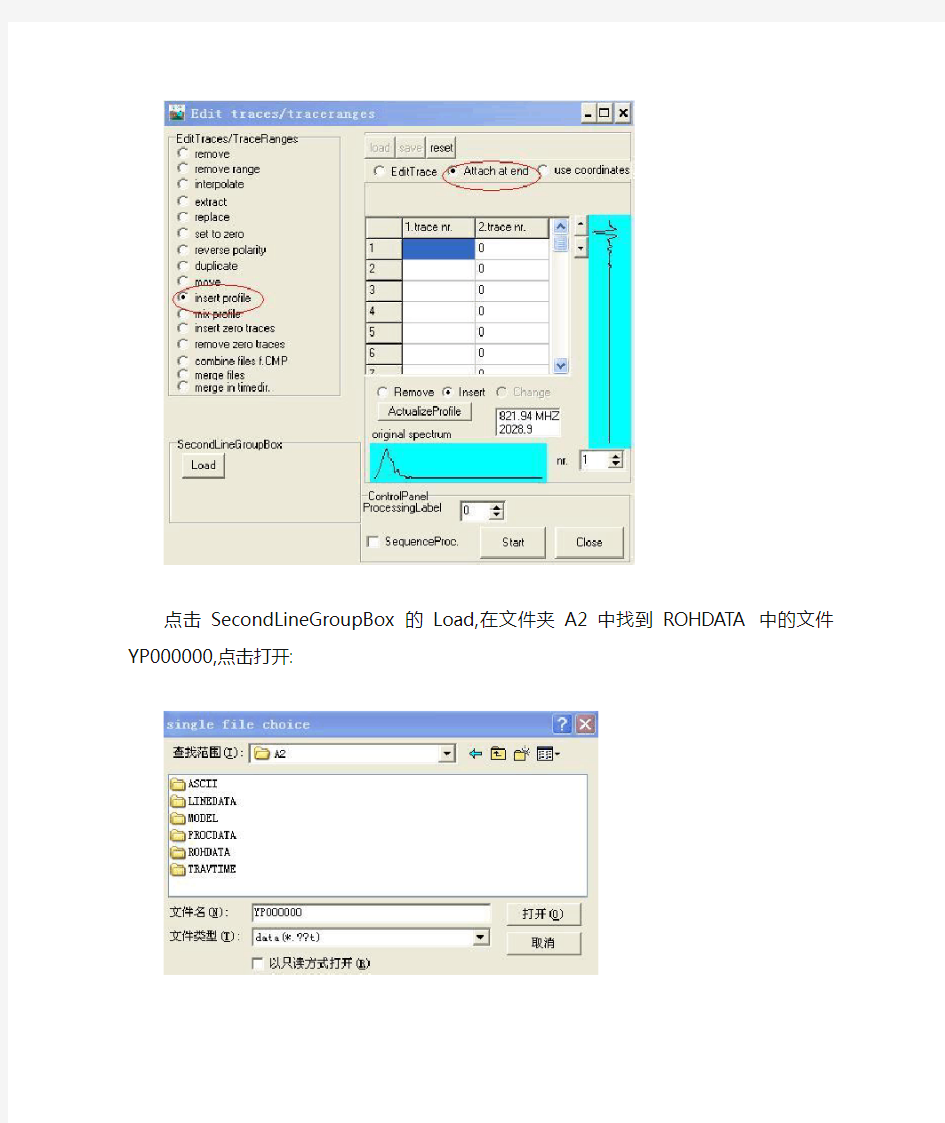
点击:Processing-----Edit traces/traceranges,参数选择如下:
点击SecondLineGroupBox的Load,在文件夹A2中找到ROHDA TA中的文件YP000000,点击打开:
点击start,见下图:
这样图像2就接到图像1的后边。其它处理不变。
S A R 图像点目 标仿真报告 徐一凡 1 SAR 原理简介 合成孔径雷达(Synthetic Aperture Radar ,简称SAR)是一种高分辨率成像雷达技术。它利用脉冲压缩技术获得高的距离向分辨率,利用合成孔径原理获得高的方位向分辨率,从而获得大面积高分辨率雷达图像。 SAR 回波信号经距离向脉冲压缩后,雷达的距离分辨率由雷达发射信号带宽决定:2r r C B ρ=,式中r ρ表示雷达的距离分辨率,r B 表示雷达发射信号带宽,C 表示光速。同为 (PT x = ,0z =;), (;)PT R s r = = (2) (;)R s r 就表示任意时刻s 时,目标与雷达的斜距。一般情况下,0v s s r -<<,于是通过傅里叶技术展开,可将(2)式可近似写为: 2 20(;)()2v R s r r s s r =≈+- (3) 可见,斜距是s r 和的函数,不同的目标,r 也不一样,但当目标距SAR 较远时,在观测带
内,可近似认为r 不变,即0r R =。 图2:空间几何关系 (a)正视图 (b)侧视图 图2(a)中,Lsar 表示合成孔径长度,它和合成孔径时间Tsar 的关系是Lsar vTsar =。(b)中,θ?为雷达天线半功率点波束角,θ为波束轴线与Z 轴的夹角,即波束视角,min R 为近距点距离,max R 为远距点距离,W 为测绘带宽度,它们的关系为: 2min (R H tg θθ?=?-) 式中,rect()表示矩形信号,r K 为距离向的chirp 信号调频率,c f 为载频。 雷达回波信号由发射信号波形,天线方向图,斜距,目标RCS ,环境等因素共同决定,若不考虑环境因素,则单点目标雷达回波信号可写成式(6)所示: ()()r n n s t wp t n PRT στ∞=-∞= -?-∑ (6) 其中,σ表示点目标的雷达散射截面,w 表示点目标天线方向图双向幅度加权,n τ表
合成孔径雷达概述 1合成孔径雷达简介 (2) 1.1 合成孔径雷达的概念 (2) 1.2 合成孔径雷达的分类 (3) 1.3 合成孔径雷达(SAR)的特点 (4) 2合成孔径雷达的发展历史 (5) 2.1 国外合成孔径雷达的发展历程及现状 (5) 2.1.1 合成孔径雷达发展历程表 (6) 2.1.2 世界各国的SAR系统 (9) 2.2 我国的发展概况 (11) 2.2.1 我国SAR研究历程表 (11) 2.2.2 国内各单位的研究现状 (12) 2.2.2.1 电子科技大学 (12) 2.2.2.2 中科院电子所 (12) 2.2.2.3 国防科技大学 (13) 2.2.2.4 西安电子科技大学 (13) 3 合成孔径雷达的应用 (13) 4 合成孔径雷达的发展趋势 (14) 4.1 多参数SAR系统 (15) 4.2 聚束SAR (15) 4.3极化干涉SAR(POLINSAR) (16) 4.4合成孔径激光雷达(Synthetic Aperture Ladar) (16) 4.5 小型化成为星载合成孔径雷达发展的主要趋势 (17) 4.6 性能技术指标不断提高 (17) 4.7 多功能、多模式是未来星载SAR的主要特征 (18) 4.8 雷达与可见光卫星的多星组网是主要的使用模式 (18) 4.9 分布SAR成为一种很有发展潜力的星载合成孔径雷达 (18) 4.10 星载合成孔径雷达的干扰与反干扰成为电子战的重要内容 (19) 4.11 军用和民用卫星的界线越来越不明显 (19) 5 与SAR相关技术的研究动态 (20) 5.1 国内外SAR图像相干斑抑制的研究现状 (20) 5.2 合成孔径雷达干扰技术的现状和发展 (20) 5.3 SAR图像目标检测与识别 (22) 5.4 恒虚警技术的研究现状与发展动向 (25) 5.5 SAR图像变化检测方法 (27) 5.6 干涉合成孔径雷达 (31) 5.7 机载合成孔径雷达技术发展动态 (33) 5.8 SAR图像地理编码技术的发展状况 (35) 5.9 星载SAR天线方向图在轨测试的发展状况 (37) 5.10 逆合成孔径雷达的发展动态 (38) 5.11 干涉合成孔径雷达的发展简史与应用 (38)
第四章 合成孔径雷达 合成孔径雷达(Synthetic Aperture Radar ,简称SAR )是成像雷达中应用最 多,也是本书讨论的重点。在前几章对雷达如何获取高的距离分辨率和横向分辨 的基础上,从本章开始用三章的篇幅对合成孔径雷达作较详细的讨论。 首先,结合工程实际介绍合成孔径雷达的原理。在前面的讨论中已经提到, 根据不同的要求,成像算法(特别是横向成像算法)有许多种,本章只介绍最简 单的距离-多普勒算法的原理,目的是由此联系到对合成孔径雷达系统的要求以 及工程实现方面的问题。 合成孔径雷达通常以场景作为观测对象,它与一般雷达有较大不同,我们将 在本章讨论合成孔径雷达有别于一般雷达的一些技术性能和参数。 4.1 条带式合成孔径雷达成像算法的基本原理 4.1所示,设X 轴为场景的中心 线,Q 为线上的某一点目标,载机以 高度H 平行于中心线飞行,离中心线 的最近距离B R 为 B R = (4.1) 当载机位于A 点时,它与Q 点的斜距 为 R = (4.2) 式中t X 为点目标Q 的横坐标。 当分析中心线上各个点目标的回波状况及成像算法时,可以在包括场景中心 线(即X 轴)和载机航线的平面里进行。至于场景里中心线外的情况将在后面 说明,这里暂不讨论。 一般合成孔径雷达发射线性调频(LFM )脉冲,由于载机运动使其到目标的 距离发生变化,任一点目标回波在慢时间域也近似为线性调频,而且包络时延也 几何示意图
随距离变化,即所谓距离徙动。合成孔径雷达成像算法的任务是从载机运动录取得到的快、慢时间域的回波数据,重建场景图像,它是二维匹配滤波问题。 严格考虑距离徙动的成像算法比较复杂,在实际应用中,一般均根据情况采用一些较简单的算法,这些将在第五章里系统介绍。在这里我们主要讨论分辨率较低,距离徙动影响可以忽略的最简单的情况,这时可采用简易的距离-多普勒基本算法。 所谓距离徙动的影响可以忽略不计是指雷达波束扫过某点目标的相干处理时间里,目标斜距变化引起的距离徙动值小于距离分辨单元长度的1/4~1/8,即场景中心线上所有点目标的回波(距离压缩后的)在慢时间域里均位于同一个距离单元。当然,因斜距改变引起的二次型相位变化还是需要考虑的,即系统的脉冲响应函数应考虑二次型相位。这种情况下的成像算法是比较简单的,可将回波信号先在快时间域作脉压匹配滤波,然后再对快时间域的每一个距离单元分别沿慢时间作方位压缩的匹配处理,于是得到场景的二维图像。在上面的图4.1中,我们提出只对中心线上的目标进行讨论,场景的二维图像当然包括场景里中心线以外的目标,这将在下一节里说明。 脉压匹配滤波可以在时域用回波数据与系统函数作卷积处理,也可以在频域作乘积处理,由于乘积的运算量小,同时时频域之间的傅里叶变换有FFT快速算法,频域计算用得更多。此外,由于场景有一定宽度,比发射脉冲宽度宽不少,而沿慢时间录取的数据长度一般也比波束扫过一个点目标的相干积累时间长得多,即时域信号长度比系统匹配函数长得多,这里应将信号分段处理后再加以拼接。 4.2合成孔径雷达回波的多普勒特性 信号有时域表示和频域表示,一般情况直接获取的是时域信号,通过傅里叶变换得到它的频谱。合成孔径雷达信号也是如此,快时间表示的发射信号是在时域生成,而慢时间回波则为载机运动过程中回波的变化序列。通过傅里叶变换,可以得到快时间频谱(距离谱)和慢时间频谱(多普勒谱或方位谱)。 合成孔径雷达信号有它的特殊性,它的回波为众多点目标回波的线性组合,而对一个点目标来说,其快、慢时间回波均为(或近似为)线性调频信号。对于
与光学图像相比,SAR图像视觉可读性较差,并且受到相干斑噪声及阴影、透视收缩、迎坡缩短、顶底倒置等几何特征的影响。因此对SAR雷达图像的图像增强与边缘检测将有别于一般的光学图像。 首先,图像增强技术是指按特定的需要突出一幅图像中的某些信息,同时削弱或去除某些不需要的信息,它是一种将原来不清晰的图像变得清晰或强调某些感兴趣的特征,抑制不感兴趣的特征,使之改善图像质量,丰富信息量,加强图像判读和识别效果的图像处理方法。从纯技术上讲,图像技术分为频域处理法和空域处理法。 空域图像增强是直接对图像中的像素进行处理,基本上是以灰度影射变化为基础的,所用的影射变换取决于增强的目的。具体来说,空域法包括点运算和模板处理,其中点运算时针对每个像素点进行处理的,与周围的像素点无关。空域增强方法大致分为3种,它们分别是用于扩展对比度的灰度变换、清除噪声的各种平滑方法和增强边缘的各种锐化技术。灰度变换主要利用点运算来修改图像像素的灰度,是一种基于图像变换的操作;而平滑和锐化都是利用模板来修改像素灰度,是基于图像滤波的操作。 频域处理法的基础是卷积定理。传统的频域法是将需要增强的图像进行傅里叶变换或者离散余弦变换,或者是小波变换,然后将其与一个转移函数相乘,再将结果进行反变换得到增强的图像。 在空域图像增强中,形态学的基本思想是使用具有一定形态的结构元素度量和提取图像中的对应形状,从而达到图像进行分析和识别的目的,利用不同的数学形态学变换滤波方法在对S AR图像直接进行平滑滤波的应用中取得较好的结果。算法简单,物理意义明显。 形态学的基本思想是使用具有一定形态的结构元素度量和提取图像中的对应形状,从而达到图像进行分析和识别的目的。由于形态学算子实质上是表达物体或形状的集合与结构元素之间的相互作用,结构元素的形态就决定了这种运算所提取的信号的形态信息。因此数学形态学对信号的处理具有直观上的简单性和数学上的严谨性,在描述信号形态特征上具有独特的优势。同时,形态学中的形态滤波器可借助于先验的几何特征信息,利用形态学算子有效地滤除噪声,又保留图像中的原有信息。因此在图像平滑滤波、分割、识别、形状描述等方面得到了广泛的应用,它最显著的特点是直接处理图像表面的几何形状,具有快速、健壮和精确的特性。 本文将开运算和闭运算的另外一种组合方法——交替顺序滤波运用到s AR图像增强处理中。它是用一系列不断增大的结构元素来执行开闭滤波。具体过程如下:本文开始使用的是一个2 ×2较小的结构元素,然后增加其大小,直到其大小与获得单个开闭滤波器最佳效果所用的3 ×3结构元素的大小相同为止。 在频域图像增强中,小波变换的时域与频域是具有多分辨率的时频分析方法,我们可以利用它的这个特性来对信号做高通滤波和低通滤波,得到原始信号的逼近信号和细节信号。对一幅图像sar进行基于小波变换的增强处理,主要步骤:1、对图像用mallat快速算法进行小波分解;2、选取增强系数;3、对处理后的小波系数进行小波逆变换,得到增强图像。多尺度积用于图像边缘检测。但小波变换各向同性的性质导致方向选择性差,不能有效地捕捉轮廓信息。 其次图像边缘检测边缘的种类分为两种,一种为阶跃性边缘,它两边的像素的灰度值有着显著的不同;另一种成为屋顶状边缘,它位于灰度值从增加到减少的变化转折点。边缘特征提取的常用方法有Sobel算子和Cannny算子,其中canny算子对高斯加性噪声有一定的抑制作用,提取的边缘方向和位置信息比较准确,但是SAR的噪声为Gamma分布的乘性噪声,
SAR 图像点目标仿真报告 徐一凡 1 SAR 原理简介 合成孔径雷达(Synthetic Aperture Radar ,简称SAR)是一种高分辨率成像雷达技术。它利用脉冲压缩技术获得高的距离向分辨率,利用合成孔径原理获得高的方位向分辨率,从而获得大面积高分辨率雷达图像。 SAR 回波信号经距离向脉冲压缩后,雷达的距离分辨率由雷达发射信号带宽决定: 2r r C B ρ= ,式中r ρ表示雷达的距离分辨率,r B 表示雷达发射信号带宽,C 表示光速。同样,SAR 回波信号经方位向合成孔径后,雷达的方位分辨率由雷达方位向的多谱勒带宽决定:a a a v B ρ= ,式中a ρ表示雷达的方位分辨率,a B 表示雷达方位向多谱勒带宽,a v 表示方位向SAR 平台速度。在小斜视角的情况下,方位分辨率近似表示为2 a D ρ=,其中D 为方位向合成孔径的长度。 2 SAR 的几何关系 雷达位置和波束在地面覆盖区域的简单几何模型如图1所示。此次仿真考虑的是正侧视的条带式仿真,也就是说倾斜角为零,SAR 波束中心和SAR 平台运动方向垂直的情况。 图1 雷达数据获取的几何关系 建立坐标系XYZ 如图2所示,其中XOY 平面为地平面;SAR 平台距地平面高H ,以速度V 沿X 轴正向匀速飞行;P 点为SAR 平台的位置矢量,设其坐标为(x,y,z); T 点为目标的位置矢量,设其坐标为(,,)T T T x y z ;由几何关系,目标与SAR 平台的斜距为: R PT == 由图可知:0,,0T y z H z ===;令x vs =?, 其中v 为平台速度,s 为慢时间变量(slow time ) ,
SAR 图像点目标仿真报告 徐一凡 1 SAR 原理简 介 合成孔径雷达 (Synthetic Aperture Radar . 简称 SAR)是一种高分辨率成像雷达技术。 它利用脉冲压缩技术获得高的距离向分辨率 . 利用合成孔径原理获得高的方位向分辨率 . 从 而获得大面积高分辨率雷达图像。 SAR 回波信号经距离向脉冲压缩后 . 雷达的距离分辨率由雷达发射信号带宽决定: r 2C B r . 式中 r 表示雷达的距离分辨率 . B r 表示雷达发射信号带宽 . C 表示光速。同 样.SAR 回波信号经方位向合成孔径后 . 雷达的方位分辨率由雷达方位向的多谱勒带宽决定: SAR 平台速度。在小斜视角的情况下 . 方位分辨率近似表示为 a D . 其中 D 为方位向合成 2 孔径的长度。 2 SAR 的几何关系 雷达位置和波束在地面覆盖区域的简单几何模型如图 1 所示。此次仿真考 虑的是正侧 视的条带式仿真 . 也就是说倾斜角为零 .SAR 波束中心和 SAR 平台运动方向垂直的情况。 图1 雷达数据获取的几何关系 建立坐标系 XYZ 如图 2 所示. 其中 XOY 平面为地平面; SAR 平台距地平面高 H.以速度 V 沿 X 轴正向匀速飞行; P 点为 SAR 平台的位置矢量 . 设其坐标为 (x,y,z) ; T 点为目标的位 置矢量 .设其坐标为 (x T , y T , z T ) ;由几何关系 .目标与 SAR 平台的斜距为: 由图可知: y 0, z H , z T 0 ;令 x v s . 其中 v 为平台速度 .s 为慢时间变量( slow v a a . 式中 B a a 表示雷达的方位分辨率 B a 表示雷达方位向多谱勒带宽 . v a 表示方位向 uuur R PT (x x T )2 (y y T )2 (z z T )2 (1)
Real and Synthetic Aperture Radar
Real Aperture Radar (RAR) flight direction
azimuth Synthetic Aperture Radar (SAR) flight direction
azimuth
1
Spatial Resolution (1)
2
距离分辨率 与真实孔径雷达距离向分辨率相同。但由于真实孔径 机载雷达一般用短脉冲来实现距离向分辨率,而合成孔 径雷达通常用带宽(脉冲频率的变化范围)为B的线性调 频脉冲来实现作用距离向的良好分辨率。
δr =
1 c cτ = 2 2B
Spatial Resolution (2)
For Real Aperture Radar (Side-looking Radar)
razimuth ?
λR
l cτ 2 sin θ
rground ? range =
For Synthetic Aperture Radar (SAR)
razimuth ?
l 2 c 2 B sin θ
rground ?range =
3
Rr =
τc
2 cos γ
=
ground Range resolution
pulse length × speed of light 2 cos ( depression angle )
Range Resolution (2)
4
合成孔径雷达成像自聚焦算法的比较 【摘要】本文简要地分析和比较两类合成孔径雷达自聚焦算法的特点,并通过多点目标自聚焦成像对其进行验证,表明结论可靠。 【关键词】自聚焦算法;多点目标;孔径雷达 0 引言 SAR自聚焦算法的任务是首先要对经过处理后的未补偿的SAR信号进行相位误差估计,然后消除其相位误差。SAR自聚焦算法就其本质而言是一个二维估计问题,在公式(2)中的相位误差既是空变的又是不可分离的乘性噪声的事实使问题变得极为棘手。影响成像的几何线性,分辨率、图像对比度和信噪比的主要因素取决于相位误差的性质和大小,基于处理孔径上相位误差形式,表1给出两大类相位误差及其每一类对SAR成像的一般影响。 表1 相位误差的分类 1 几种实用的自聚焦算法的比较 一般来说,自聚焦算法可以划分为两类:基于模式算法和非参数算法。基于模式的自聚焦算法估计相位误差的模式展开系数。低阶模自聚焦仅能估计二阶相位误差,而更复杂的方法还可以估计高阶多项式相位误差。子孔径相关法(MD)和多孔经相关法(MAM)是针对低频相位误差补偿提出的基模自聚焦算法的范例。基于模式算法虽然执行起来相对简单而且算法高效。不过只能相位误差被正确估计的情况下才能保证这样的优越性。 第二类自聚焦算法,即非参数自聚焦算法,典型的有相位梯度自聚焦算法,基于最小熵准则和最大对比度准则的自聚焦方法,这些方法都不需要相位误差的先验知识。特别地,相位梯度自聚焦算法几种改进的算法。其中特征向量法是在PGA框架下运用了极大似然算子取代了原始的相位差算子核,改进的相位梯度自聚焦算法的策略通过选择一组高质量的目标以提供非迭代的PGA解。另一种方法是运用加权最小二乘法以实现相位误差最小化的PGA。适用范围扩大,计算高效。 在一些SAR应用中,相位误差显著依赖位置,空变的自聚焦的常用的方法是将大场景分成更小的子图像,每个子图像的误差近似不变的,因此,传统的空间不变的自聚焦程序可以应用到每个子图像。当重新聚焦时,个别的子图像拼接或镶嵌在一起产生完整的场景图像聚焦图像。 2 性能评价标准 第一个测试是检查在方位域一维的点目标响应。聚焦质量质量指标包括3dB
雷达成像技术实验报告 实验一 ——线性调频信号的匹配实验理论分析: 线性调频信号的一般表示形式为:s=exp(j*pi*k*t.^2),雷达发射信号脉冲线性调频信号,回波有一定的脉宽。雷达测距的分辨率受回波脉宽的影响,因此对接收信号进行脉冲压缩可以提高雷达测距分辨率。 脉冲压缩的思路是对接受信号做相关。对信号做相关,即使信号通过一匹配滤波器,匹配滤波器的冲激响应为s*(-t),系统传递函数S*(f) 。对于线性调频信号S(f)=exp(-j*pi*f.^2/k)。所以S*(f) =exp(j*pi*f.^2/k)。 可以有三种方法实现匹配滤波。 1.信号直接通过滤波器Hf=exp(j*pi*f.^2/k)。 2.对回波信号s(t)进行变换得到s*(-t),再将回波信号通过以s*(-t)为冲激响应的滤波器。 对回波信号s(t)进行变换得到S*(f),再将回波信号通过以S*(f)为系统传递函数的滤波器。 源程序: clear all Tu=10.e-6; Br=100.e6; fs=120.e6; ts=1/fs; kr=Br/Tu; N=round(fs*Tu); N=2^(round(log2(N))+1).*2; Tp=N/fs; t=(-Tp/2:ts:(Tp/2-ts))+14.e-6; s1=exp(j*pi*kr*(t-13.e-6).^2).*(abs(t-13.e-6) 雷达图像处理ENVI ENVI提供基本的雷达图像处理功能,包括雷达数据格式支持、雷达文件定标、消除天线增益畸变、斜距校正、入射角图像生成、斑点噪声压缩、合成彩色图像等。 多标准ENVI图像处理功能也可以用于处理雷达数据的处理,如图像显示功能、图像拉伸、颜色处理、图像分类、几何校正、图像配准、卷积滤波、图像融合等。 目前,大所述雷达成像系统都是侧视成像,这种雷达系统所测量的距离是目标物到平台一侧的距离(倾斜距离),基于这种几何系统获得的图像叫斜距图像。雷达斜距数据在侧向范围有系统几何畸变,实际上,由于入射角的变化使得垂直侧向范围的地距和像素大小发生变化。因此,要使用雷达图像,必须经过从斜距到地距的校正处理。 自适应滤波器被设计成对斑点噪声压缩的同时,对图像分辨率的减少是微笑的。自适应滤波器运用围绕每个像元值标准差来计算一个新的像元值。不同于传统的低通平滑滤波,自适应滤波器在抑制噪声的通透式保留了图像的高频信息和细节。 Lee滤波器用于平滑亮度各图像密切相关的噪声数据以及附加或倍增类型的噪声。 增强型Lee滤波器可以在保持雷达图像纹理信息的同时减少斑点噪声。 Frost滤波器能在保留边缘的情况下,减少斑点噪声。 增强型Frost滤波器可以在保持雷达图像纹理信息的同时减少斑 点噪声。 Gamma滤波器可以用于在雷达图像中保留边缘信息的同时减少斑点噪声。 Kuan滤波器用于在雷达图像中保留边缘的情况下,减少斑点噪声。 Local Sigma滤波器能很好地保留细节并有效地减少斑点噪声,及时是在对比度较低的区域。 Bit Error Filters比特误差误差滤波器可以消除图像中的”bit-error”噪声。 合成孔径雷达第一次作业 姓名:xxx 学号:xxx 一题目: 1.LFM信号分析:(1)仿真LFM信号;(2)观察不同TBP的LFM信号的频谱。(3)观察不同过采样率下的DFT结果,注意频谱混叠情况。 2.脉冲压缩仿真:针对“基带LFM信号”:(1)实现无误差的脉冲压缩;(2)通过频域补0实现时域十倍以上的过采样率,得到光滑的时域波形,通过观察给出指标(IRW,PSLR);(3)阅读资料,按照公式实现3阶(-20dB),6阶(-40 dB)泰勒加权,观察加窗效果,分析指标(IRW,PSLR),并对比MATLAB TAYLORWIN 函数的一致性;(4)在3阶泰勒加权下实现15.30.45.60.90.135度QPE下的脉冲压缩,显示输出波形,观察记录QPE的影响。 3.一维距离向仿真:(1)输入参数:目标参数:RCS=1,分别位于10km,11km,11km+3m,11km+50m处。LFM信号参数:中心频率1.0GHz,脉冲宽度30us,带宽30MHz。 (2)输出:设计采样波门,仿真回波,完成脉冲压缩,检测各峰值位置,判断每个目标是否得以分辨,分析各出现在相应位置及幅度的原因。 二题目分析与解答: 1.问题分析:由基础知识知,决定LFM信号的主要参数有中心频率fc(此处仿真取fc=0),带宽B,脉冲宽度Tp, 调频斜率K,其中K=B/Tp。对LFM信号进行傅里叶变换时,不同的时宽带宽积(TBP)会对频谱有不同的影响。 主要程序段(源程序见附件): %参数设置 Tp=5e-6; B=10e6; K=B/Tp;Fs=2*B; Ts=1/Fs; N=Tp/Ts; TBP=Tp*B %波形产生 t=linspace(-Tp/2,Tp/2,N); St=exp(j*pi*K*t.^2); Phase=pi*K*t.^2; Fre=2*pi*K*t; f=linspace(-Fs/2,Fs/2,N); figure(2) plot(f*1e-6,fftshift(abs(fft(St))),'k'); xlabel('Frequency/MHz'); ylabel('Magnitude'); title('Frequence Response'); legend('TBP=50') fft_St=fftshift(abs(fft(St))); 合成孔径雷达成像几何机理分析及处理方法研究合成孔径雷达作为二十世纪出现的尖端对地观测技术,由于它具有全天时、全天候的成像能力并能穿透一些地物,在土地覆盖制图、生态和农业、固体地球科学、水文、海冰等众多领域有着广泛的应用。随着未来更高分辨率、多极化、多波段、更优化的干涉测量设计的SAR系统的出现,合成孔径雷达遥感技术将会在更多的领域扮演更重要的角色。 合成孔径雷达遥感技术在我国有着极大的潜在应用市场,对于某些特殊问题的解决,例如西部困难地区的地形图测绘及南方阴雨地区地形图的快速更新,它甚至是唯一可行的解决之道。由于有关几何处理、辐射定标等基础问题没有很好地解决,影响了这一技术在我国的大规模应用及产业化进程。 本文致力于解决SAR影像的几何问题及与地形有关的辐射问题,对合成孔径雷达图像的几何特性作了系统深入的研究,以对构像方程的分析及推导为中心,研究并解决了包括地理编码、目标定位、影像模拟、利用控制点进行空间轨道精确重建、地形辐射影响的消除等一系列问题。为了加强对合成孔径雷达图像的理解,首先对合成孔径雷达成像的技术本质从数学上进行了简明阐述。 从信号处理的角度,分析了脉冲压缩的工作原理,解释了匹配滤波器的构造。分析了多普勒频率的特征及其作用。 从理论上推导了SAR距离向和方位向分辨率所能达到的极限值,并且指出了他们在实际中的限制。从系统的角度,分析了SAR距离向和方位向模糊度的限制。 构像方程是所有几何处理的基础。为推导了SAR构像方程,在定量分析了地球摄动力对卫星轨道影响的基础上,提出了一套改进的SAR轨道参数模型,与国外已有的模型相比,该模型更加简洁而且具有极高的精度。 雷达数据处理步骤及效果展示 一、隧道衬砌质量检测数据处理步骤 1、打开软件RADAN,选择文件夹View→Customize→Directories; 2、打开文件File→Open(*.dzt); 3、扫描信息预编辑:选择一段扫描剖面,切除多余扫描信息Cut,保存特定扫描剖面; 4、文件测量方向反转:打开文件,选择File→Save As ,打勾,另存; 5、距离信息编辑:(1)编辑文件头的距离信息Edit→File Header, 扫描/米[scans/m], 米/标记[m/mark],(2)编辑用户标记,(3)距离归一化处理; 6、里程编辑:Edit→File Header →3D option→X start输入里程起点坐标; 7、水平幅度调整: Process→Horizontal scale(叠加stacking、抽道skipping、加密stretching); 8、调整地面反射信号位置:方法有两种,(1)Edit→File Header→position(ns),(2)Process→Correct Position→delta pos (ns); 9、介电常数调整:利用经验或钻孔获得介电常数,通过Edit→File Header→DielConstant调整; 10、增益调整: Process→Range Gain,增益点数易选5个; 11、水平滤波: Process→FIR Filter; 12、背景去除: Process→FIR Filter; 13、一维频率滤波 Process→IIR Filter; 14、反褶积、一维频率滤波: Process→Deconvolution; Process→IIR Filter; 15、文件拼接:选择File→Append files; 合成孔径雷达(SAR)的点目标仿真(附件带代码程序) 合成孔径雷达(SAR)的点目标仿真 一. SAR原理简介 合成孔径雷达(Synthetic Aperture Radar ,简称SAR)是一种高分辨率成像雷达技术。它利用脉冲压缩技术获得高的距离向分辨率,利用合成孔径原理获得高的方位向分辨率,从而获得大面积高分辨率雷达图像。SAR回波信号经距离向脉冲压缩后,雷达的距离分辨率由雷达发射信号带宽决定:,式中表示雷达的距离分辨率,表示雷达发射信号带宽,表示光速。同样,SAR回波信号经方位向合成孔径后,雷达的方位分辨率由雷达方位向的多谱勒带宽决定:,式中表示雷达的方位分辨率,表示雷达方位向多谱勒带宽,表示方位向SAR平台速度。 二. SAR的成像模式和空间几何关系 根据SAR波束照射的方式,SAR的典型成像模式有Stripmap(条带式),Spotlight(聚束式)和Scan(扫描模式),如图2.1。条带式成像是最早研究的成像模式,也是低分辨率成像最简单最有效的方式;聚束式成像是在一次飞行中,通过不同的视角对同一区域成像,因而能获得较高的分辨率;扫描模式成像较少使用,它的信号处理最复杂。 图2.1:SAR典型的成像模式 这里分析SAR点目标回波时,只讨论正侧式Stripmap SAR,正侧式表示SAR波束中心和SAR平台运动方向垂直,如图2.2,选取直角坐标系XYZ为参考坐标系,XOY平面为地平面;SAR平台距地平面高h,沿X轴正向以速度V匀速飞行;P点为SAR平台的位置矢量,设其坐标为(x,y,z);T点为目标的位置矢量,设其坐标为;由几何关系,目标与SAR平台的斜距为: (2.1) 由图可知:;令,其中为平台速度,s为慢时间变量(slow time),假设,其中表示SAR平台的x 坐标为的时刻;再令,表示目标与SAR的垂直斜距,重写2.1式为: (2.2) 就表示任意时刻时,目标与雷达的斜距。一般情况下,,于是2.2式可近似写为: (2.3) 可见,斜距是的函数,不同的目标,也不一样,但当目标距SAR较远时,在观测带内,可近似认为不变,即。 第二章距离高分辨和一维距离像 雷达采用了宽频带信号后,距离分辨率可大大提高,这时从一般目标(如飞 机等)接收到的已不再是“点”回波,而是沿距离分布开的一维距离像。 雷达回波的性质可以用线性系统来描述,输入是发射脉冲,通过系统(目标) 的作用,输出雷达回波。系统的特性通常用冲激响应(或称分布函数)表示,从 发射波形与冲激响应的卷积可得到雷达回波的波形。 严格分析和计算目标的冲激响应是比较复杂的,要用到较深的电磁场理论, 不属于本书的范围。简单地说,雷达电波作用的目标的一些部件对波前会有后向 散射,当一些平板部分面向雷达时还会有后向镜面反射;这些是雷达回波的主要 部分;此外还有谐振波和爬行波等。因此,目标的冲激响应(分布函数)可以用 散射点模型近似,即目标可用一系列面向雷达的散射点表示,这些散射点位于后 向散射较强的部位。由于谐振波和爬行波的滞后效应,有时也会有少数散射点在 目标本体之外。如上所述,目标的散射点模型显然与雷达的视线向有关,例如当 飞机的平板机身与雷达射线垂直时有很强的后向镜面反射,而在偏离不大的角度 后,镜向反射射向它方,不为雷达所接收。目标的雷达散射点模型随视角的变化 而缓慢改变,且与雷达波长有关,分析和实验结果表明,在视角变化约10°的 范围里,可认为散射点在目标上的位置和强度近似不变。顺便提一下,前面曾提 到微波雷达对目标作ISAR成像,目标须转动3°左右,在分析时用散射点模型 是合适的。 虽然目标的散射点模型随视角 快得多。可以想像到,一维距离像是 三维分布散射点子回波之和,在平面 波的条件下,相当三维子回波以向量 和的方式在雷达射线上的投影,即相 同距离单元里的子回波作向量相加。 我们知道,雷达对目标视角的微小变 化,会使同一距离单元内而横向位置 2003年第17卷第1期 测试技术学报V ol.17 N o.1 2003(总第43期)JOURNAL OF TEST AND MEASUREMENT TECHNOLOGY (Sum N o .43)文章编号:1671-7449(2003)01-0015-04 高分辨率合成孔径雷达图像舰船检测方法 种劲松,朱敏慧 (中国科学院电子学研究所微波成像技术国家重点实验室,北京100080) 摘 要: 寻找针对高分辨率SA R 图像的舰船目标检测算法.利用K SW 双阈值分割技术,其效果比传统检 测方法好,有利于进一步的目标分类和识别.且必须根据SAR 图像分辨率来选择舰船检测算法. 关键词: 目标检测;图像分割;合成孔径雷达 中图分类号: T N 957.51 文献标识码:A 利用合成孔径雷达(SAR )图像进行舰船检测在海洋遥感科学家中得到高度重视,已经成为SAR 数据重要的海洋应用之一. 在SAR 图像舰船检测方面的研究很多,大多数是使用恒虚警(CFAR)算法[1~4] 针对中低分辨率(25m 以上)的SAR 图像进行的.CFAR 算法是对于给定的虚警概率,根据背景杂波的分布来给出分割阈值.这种方法属于单阈值图像分割,对于中低分辨率图像较适用. 由于SAR 图像逐渐发展到高分辨率,对于舰船目标的研究除了目标检测外,还必须考虑到检测方法是否有利于目标参数提取,从而有利于后续的目标分类和识别.在实际应用中发现,如果将CFAR 算法运用到RADARSAT 精细模式高分辨率图像(分辨率约为8m ),舰船目标的参数提取将很难进行. 本文的研究目的是寻找针对高分辨率SAR 图像的舰船目标检测算法,为此需要先分析高分辨率SAR 图像上舰船目标的特点.1 舰船目标在高分辨率SA R 图像上的特点 在中低分辨率的SAR 图像中,舰船目标是一个、几个或几十个象素组成的强目标,此时对舰船目标的检测问题是典型的点目标检测问题.而在高分辨率的SAR 图像中,舰船目标是具有一定尺寸和一定细节的硬目标,其象素数可达到几百个左右. 真实舰船的首部、中部和尾部的结构是不同的,因此同一舰船的不同部位在高分辨率SA R 图像上必然呈现出不同的灰度,即整个舰船目标的亮度分布是不均匀的.图像中舰船目标由两类点组成.亮度图1 RADARSAT 精细模式舰船图像及其三维细节Fig .1 S hip image of RADARSAT fine m od e and the details 比较高的点是角反射或点 反射(由舰船的上层建筑、 舰桥、桅杆等引起)的结 果,亮度稍低的点是漫反 射的结果(由甲板等引 起).亮度高的点组成强 峰,亮度较低的点组成弱 峰.强峰和弱峰的分布可 以作为目标特征用于目标 分类识别. 图1示出Radarsat 精细模式图像中的舰船目 收稿日期:2002-07-01 作者简介:种劲松(1969-),女,副研究员,博士,主要从事合成孔径雷达图像处理与解译的研究. 技 术创新 《微计算机信息》(管控一体化)2009年第25卷第2-3期 360元/年邮局订阅号:82-946 《现场总线技术应用200例》 图像处理 合成孔径雷达图像船舶检测分析系统 An Ship Detection And Analysis System Based On Synthetic Aperture Radar Image (1.中国科学院电子学研究所;2.中国科学院研究生院) 黄洲 1,2 齐向阳 1 HUANG Zhou QI Xiang-yang 摘要:近年来,通过海洋运输的危险品越来越频繁,海洋生态环境形式严峻。远洋及近海船舶导航、检测、监测任务繁重。本文 设计了基于CFAR 算法的SAR 图像船舶检测系统以支持船舶检测、监测任务。该系统包括全自动海岸线检测模块,全自动或半自动远洋及近海船舶检测模块。通过RADASAT SAR 图像验证系统的检测与分析是有效的。关键词:合成孔径雷达图像;船舶检测;海岸线检测;形状分析 中图分类号:TP216 文献标识码:A Abstract:Within today's increasing worldwide travel and transport of dangerous goods the need of vessel traffic services,ship routing and monitoring of ship movements on sea and along coastlines becomes more time consuming and an important responsibility for coastal authorities.This paper describes the architecture of a ship detection prototype based on a CFAR methodology to support these monitoring tasks.The system ’s architecture comprises a fully-automatic coastline detection tool,a tool for fully or semiautomatic ship detection in off -shore areas and a semi -automatic tool for ship detection within harbour -areas.Experimental results based on RADASAT image show the system is efficient. Key words:Synthetic Aperture Radar Image;ship detection;shape analysis;coastline detection 文章编号:1008-0570(2009)02-3-0298-03 1引言 自1978年第一颗海洋卫星发射升空以来,合成孔径雷达(Synthetic Aperture Radar,简称SAR)卫星为人们提供了丰富的海洋信息数据。同时,SAR 具有全天候、 全天时、多波段、多极化和多视角的观测能力。因此SAR 在海洋遥感的应有具有巨大的潜力。 近年来,利用SAR 图像进行海洋船舶目标检测与监视的研究成为最重要的SAR 海洋应用之一。目前,加拿大遥感中心的科学家开发了RADARSAT 卫星的海洋监测工作站,包括船只检测模块、油膜检测模块、海洋特征模块等。我国领海广阔,开展SAR 图像舰船目标检测与分析的研究具有重要意义。本文描述了检测系统的架构及工作流程,同时给出了SAR 图像海岸线检测、船舶检测及形状分析的方法,目标是获取海洋SAR 图像中船舶面积、重心位置、主轴方向角、长宽比等信息。这些信息可以为海洋部门对海域水运交通的监测和管理。 2系统设计与实现 为了保证系统的兼容性和稳定性,选择VC++为开发平台, 充分利用面向对象技术的特点。系统架构流程如图1a 所示,包括:海岸线检测、船舶检测、特征分析。 2.1海岸线检测 海岸线检测阶段的输入数据是SAR 图像,输出为海面图像。由于研究的目的是检测船舶目标,陆地信息不必进行处理,因此需要屏蔽掉陆地信息。利用海岸线检测算法确定海岸线,得到二值化的海岸线图像,其中陆地为0,海面为1。当进行陆地屏蔽时,将海岸线图像与输入的SAR 图像进行逻辑与操作,结果图像为SAR 海面图像,其中仅含有海面信息。 1987年,Kass M 等人提出了检测图像中物体的边界的活动轮廓算法(Active Contours),也称Snake 算法。1995年,Ravikanth Malladi ,James Sethian 和Baba Vemuri 根据1988年 Stanley Osher 和James Sethian 给出的界面传播理论, 提出了“水平截集”(Level Set)算法。此算法沿袭了活动轮廓法的特点。在此算法中,需要给出初始轮廓线,且对初始轮廓线位置的要求比活动轮廓法要求的低。在迭代计算中,二维的轮廓线被映射到三维的曲面中,如图1b 所示,控制三维曲面运动,以达到控制二维曲线运动的目的。 水平截集算法在SAR 图像海岸线检测领域得到广泛应用。 图1a 系统架构流程图b 水平截集法原理示意图 2.2船舶检测 SAR 图像海面舰船目标检测属于雷达背景杂波环境下的目标检测。一般地说,舰船主要由金属制成,而且其上的建筑构成许多角反射器,使得舰船成为一种极强的雷达反射器,在 SAR 图像上表现成非常亮的目标。 所以只要我们选择合适的阈值,所有人眼能看见的舰船目标,都可以检测出来。 双参数CFAR 检测算法采用滑动的局部窗口(如图2a 所示),使得算法可以适应局部背景杂波的变化。双参数CFAR 检测需要3个滑动窗口:目标窗口、保护窗口、背景窗口。保护窗口 黄洲:在读硕士研究生 298-- 第6卷 第3期 信 息 与 电 子 工 程 Vo1.6,No.3 2008年6月 INFORMATION AND ELECTRONIC ENGINEERING Jun.,2008 文章编号:1672-2892(2008)03-0167-05 线性调频连续波合成孔径雷达成像算法 杨 蒿,蔡竟业 (电子科技大学 通信与信息工程学院140教研室,四川 成都 610054) 摘 要:线性调频连续波(LFMCW)合成孔径雷达(SAR)因体积小,重量轻,成本相对低,成为 近来研究的热点。连续波SAR 的回波信号通常经过相干解调处理。针对其独特的应用背景和信号模 型,对现有的各种成像处理算法进行了讨论和比较,总结出其优缺点及应用范围。并对LFMCW- SAR 今后的发展提出了展望。 关键词:线性调频连续波;合成孔径雷达;成像算法 中图分类号:TN958 文献标识码:A Linear Frequency Modulated Continuous Wave-Synthetic Aperture Radar Imaging Algorithm YANG Hao,CAI Jing-ye (School of Communication and Information Engineering,UESTC,Chengdu Sichuan 610054,China ) Abstract:Linear Frequency Modulated Continuous Wave(LFMCW)-Synthetic Aperture Radar(SAR) has become a focus in recent researches,due to its compactness and low cost. This paper analyses and compares various imaging algorithms,based on the special application background and signal model derived from its dechirped raw data. Then the advantages,disadvtanges and application fields of the algorithms are presented. Future development of LFMCW SAR is prospected. Key words:Linear Frequency Modulated Continuous Wave;Synthetic Aperture Radar;imaging algorithm 目前机载对地观测受到越来越广泛的关注,其应用领域不仅涵盖搜索救援、区域监测、灾害监视与控制等民用方面,还包括小型无人机对地侦察等军事领域。合成孔径雷达与光电成像设备相比可以全天候、全天时工作,如在云雨雾等恶劣气候及夜晚条件下工作,而且具有实时大面积连续成像能率[1]。但是,传统的脉冲SAR 由于其设备复杂,体积大,重量重,成本相对较高等缺陷限制了其应用层面,特别是不能安装到小型飞机如直升机和无人机上完成一些紧急任务,也不适于低成本的民用项目[2]。因此,LFMCW ?SAR [3]以其紧凑、低耗、相对便宜且高分辨力的优点逐渐发展起来[4?10]。连续波SAR 概念自1988年被提出,并应用于飞机高度计之后,特别是连续波SAR 在发射能量一定的前提下,与脉冲SAR 相比拥有更低的发射功率,并且具有更好的隐蔽性,发射机也可以使用全固态设计,使得系统具备了高可靠性和较少维护的优点[11?14]。同时,连续波SAR 接收机前端通过相干混频处理得到差频信号,在成像带较窄的情况下,可以大大降低信号带宽,从而降低对信号高速采集与处理的需求。 本文描述了LFMCW ?SAR 的去调频信号模型,在该信号模型的基础上,讨论针对去调频信号的各种成像处理算法,对各种算法进行了比较总结,最后对未来LFMCW ?SAR 的发展进行了展望。 1 LFMCW ?SAR 的信号模型 LFMCW ?SAR 接收到的回波信号经去斜、下变频后可表示为: 2 022444(,;)exp (j )exp [j ()()]exp [j ()]c r r a r t r t c t c r k k S t t r C r t r r r r c c c λπππ=????? (1) 收稿日期:2007-11-22;修回日期:2008-01-08雷达图像处理(ENVI)
合成孔径雷达成像
合成孔径雷达成像几何机理分析及处理方法研究
雷达数据处理步骤及效果展示
合成孔径雷达(SAR)的点目标仿真(附件带代码程序)
雷达成像技术-第二章
高分辨率合成孔径雷达图像舰船检测方法
合成孔径雷达图像船舶检测分析系统
线性调频连续波合成孔径雷达成像算法
相关主题
文本预览