
基于AT89S51单片机的步进电机控制系统
2009-08-20 09:31
步进电机的工作原理
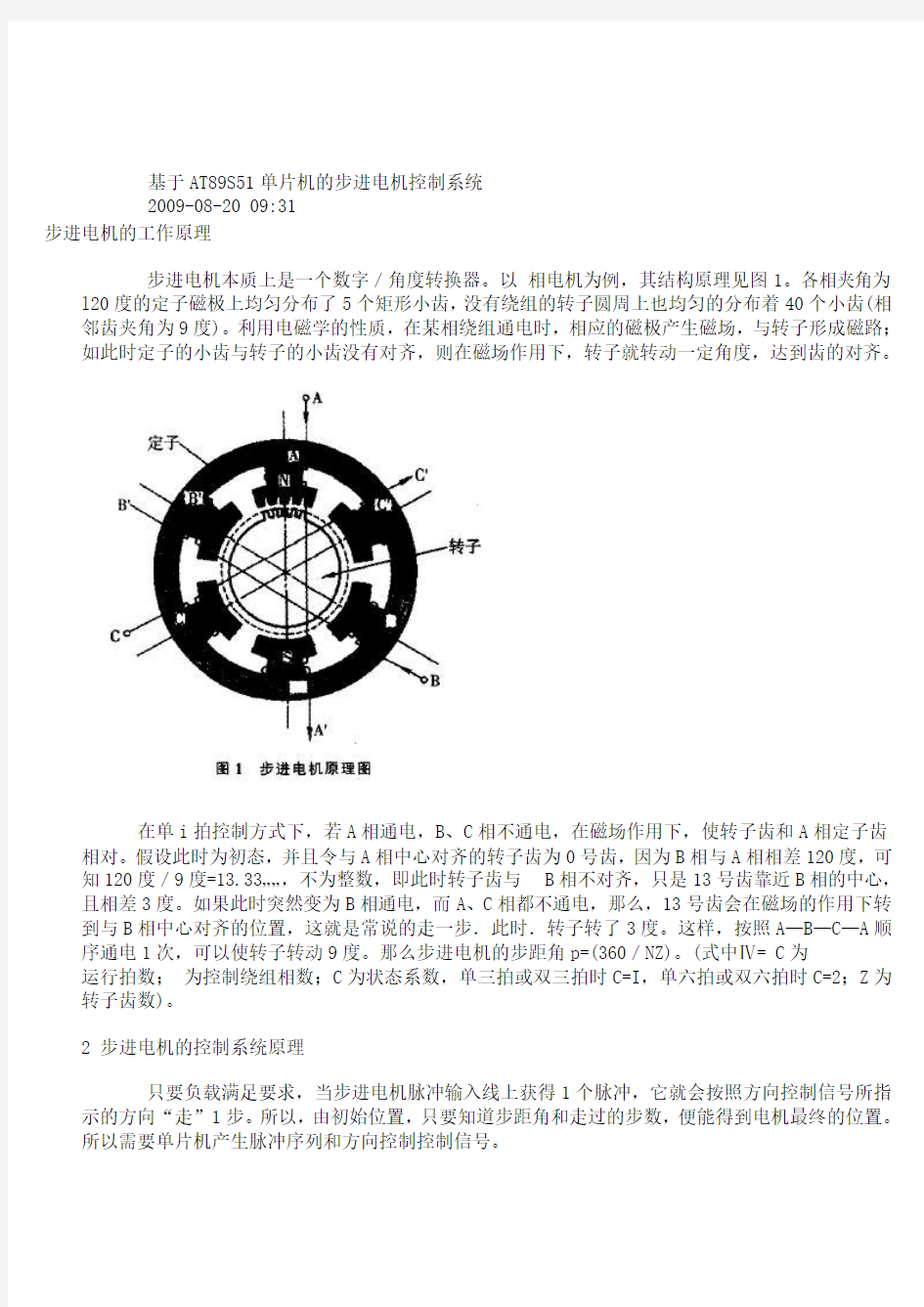
步进电机本质上是一个数字/角度转换器。以相电机为例,其结构原理见图1。各相夹角为l20度的定子磁极上均匀分布了5个矩形小齿,没有绕组的转子圆周上也均匀的分布着40个小齿(相邻齿夹角为9度)。利用电磁学的性质,在某相绕组通电时,相应的磁极产生磁场,与转子形成磁路;
如此时定子的小齿与转子的小齿没有对齐,则在磁场作用下,转子就转动一定角度,达到齿的对齐。
在单i拍控制方式下,若A相通电,B、C相不通电,在磁场作用下,使转子齿和A相定子齿相对。假设此时为初态,并且令与A相中心对齐的转子齿为0号齿,因为B相与A相相差120度,可知120度/9度=13.33……,不为整数,即此时转子齿与B相不对齐,只是13号齿靠近B相的中心,且相差3度。如果此时突然变为B相通电,而A、C相都不通电,那么,13号齿会在磁场的作用下转到与B相中心对齐的位置,这就是常说的走一步.此时.转子转了3度。这样,按照A—B—C—A顺序通电1次,可以使转子转动9度。那么步进电机的步距角p=(360/NZ)。(式中Ⅳ= C为
运行拍数;为控制绕组相数;C为状态系数,单三拍或双三拍时C=I,单六拍或双六拍时C=2;Z为转子齿数)。
2 步进电机的控制系统原理
只要负载满足要求,当步进电机脉冲输入线上获得1个脉冲,它就会按照方向控制信号所指示的方向“走”1步。所以,由初始位置,只要知道步距角和走过的步数,便能得到电机最终的位置。
所以需要单片机产生脉冲序列和方向控制控制信号。
2.1 脉冲序列信号
要步进电机可以“步进” 就得产生如图2所示的脉冲序列。此脉冲序列是用周期、脉冲高度、通断时间来表征的。数字电路中,脉冲高度由元件电平决定,如TTL电平为0~5V,COMS电平为0~10V。步进电机的每一步的响应。都需要一定的时间,即一个高脉冲要保留一定的时间,以便电机完全达到一定的位置。通断的时间可以利用延时在软件中实现,这决定了步进电机的实际工作速率。
2.2 方向控制信号
以三相步进电机为例,其存在3种工作方式,如下图:
如果以上述通电次序通电,则电机正转;反之,电机则反转。其他四相、五相、六相步进电机可以相似而得。利用AT89S51单片机的P1口中的P1.0,P1.1,P1.2分别控制三相电机的A、B、C三相绕组,由通断关系建立控制字表。
(1)三相单三拍
三相单三拍控制字表见表1。
(2)三相双三拍
三相双三拍控制字表见表2。
(3)三相六拍
三相六拍控制字表见表3。
以上所示.由上而下是正转时的控制数,由下而上是反转时的控制数。按选定的工作方式,选用对应表所示的控制数,就可以实现对步进电机的方向控制。
3 步进电机的单片机控制系统
该控制系统以AT89S51单片机为核心,配以相应的软硬件而成。
3.1 控制系统的硬件
因为步进电机工作时的驱动电流比单片机端口所能提供的要大得多.单片机要控制电机的运动就不能直接将端口与电机各相相连,必须使用一定的接口电路和驱动电路。接口电路一般为锁存器,也有使用可编程接口芯片,如8255。驱动器多选用大功率复合管。当然,考虑到实际使用中的干扰和电压安全,一般都要在单片机与驱动器之间使用必要的光电隔离器。原理图见图3。
由图3可得,若P1.2口输出为1时,发光二极管不会发光.此时光敏管处于截止状态,而达林顿管导通.所以C相通电:反之,P1.2输出为0时,由电路分析可知C相不通电。如按前面所示的表取控制数,按顺序执行,就可以使步进电机正常工作。
3.2 控制系统的软件
单片机的软件设计中,最重要的就是要解决步进电机运动中的转动方向和转动量(即步数)这两个参数。存单片机中,可以设置1个标志位,通过判断它的状态来决定转动方向,通过对转动量所在
的存储单元的按步减l来判断是否走完所需步数。另外,在软件设计中,如果以立即数方式来输出控制数,这在节拍数较多的时候或单片机还需要执行其他工作的情况下,会加大程序的长度和影响程序执行速度:这就要求程序设计中选用控制数表格和循环程序来设计软件,可以得到软件流程图见图4。
汇编程序如下:
STEP EQU 60H
CONTROL EQU 0200H
0RG 1000H
MOV R7,#STEP;
L00P0:MOV R2,#00H
M0V DPrrR.#C0NTR0L
JNB 00H,LOOP2
L00P1:M0V A.尺2
M0VC A.@A+DPrrR
JZ L00P0
M0V P1.A
CALL DEIA Y
INC 尺2
DJNZ R7.LOOP1
RET
L00P2:M0V A .尺2
ADD A .#07H
MOV R2.A
AJMP LOOPI
DELAY:? --?·
CONTROL:
DB 0lH ,03H ,02H,06H ,04H ,05H ,00H
DB 0lH,05H,04H,06H,02H,03H,OOH
这段程序中步进电机的步数是设定在程序中的。也没有写出延时程序;因为步数和延时长度是分别控制电机的运动精度和速度的两个重要参数,需要单独仔细考虑。一般电机的步数和速度可按照运动中比例关系得到。当然,如果考虑到步进电机本身的机械特性。可以知道电机的运动速度不能由静止突变为其最大运动速度;如果这样控制电机的速度,必然会造成此过程中出现失步的现象。同样,也不能使电机从其运动的最高速突变为静止状态——电机转子必然会在惯性力作用下,有一个减速过程。这样,在设计电机的运行速度时,就要利用必要的方法,来改变电机的启,停过程的速度,这在程序实现上是值得多加考虑和试验的。一般来说。变速控制主要采用改变控制方式、均匀地改变脉冲时间间隔、改变定时器参数中断这3种方法实现。
4 步进电机的细分驱动
简单地使用步进电机按步距角进行步距驱动,对整个圆周的最小分割一般在1/400到1/480之间.显然这对精度要求高的运动来说是不够的。
由前述的双拍工作方式得到提示:在AB通电时。转子小齿在平衡力下不是正对其中的某一相.而是处在AB之间:那么.如果A和B上通有不同的电压,则转子小齿就不是在中间平衡.而是在离电压大的一侧平衡。利用这样的关系。可以设计出使步距角变小的电机运动。正是由于这一功能,现在市场上已经推出不少细分电路的产品,对于使用者只要选择性价比高的产品就行了。
5 结束语
步进电机作为可以直接利用数字脉冲实现精确运动的执行部件,其运用范围相当广。本文讨论了基于AT98S51单片机的步进电机控制时的注意点,从硬件和软件上来实现对步进电机的控制;考虑到多相多拍时程序实现时的问题,指出编程优化的方法;还考虑了细分电路的意义。它们对实现单片机控制步进电机具有很重要的现实意义。
摘
自:https://www.doczj.com/doc/1816141698.html,/%B9%C8%B6%B9%B2%D0%CB%AA/blog/item/fb6f88f7d91b582b720eecc4.html
基于用单片机控制步进电机的课程设计
作者:佚名来源:不详录入:Admin更新时间:2008-7-27 14:00:00点击数:3
【字体:
步进电机是机电控制中一种常用的执行机构,它的用途是将电脉冲转化为角位移,通俗地说:当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度(及步进角)。通过控制脉冲个数即可以控制角位移量,从而达到准确定位的目的;同时通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
一、步进电机常识
常见的步进电机分三种:永磁式(PM),反应式(VR)和混合式(HB),永磁式步进一般为两相,转矩和体积较小,步进角一般为7.5度或15度;反应式步进一般为三相,可实现大转矩输出,步进角一般为1.5度,但噪声和振动都很大。在欧美等发达国家80年代已被淘汰;混合式步进是指混合了永磁式和反应式的优点。它又分为两相和五相:两相步进角一般为1.8度而五相步进角一般为0.72度。这种步进电机的应用最为广泛。
二、永磁式步进电机的控制
下面以电子爱好者业余制作中常用的永磁式步进电机为例,来介绍如何用单片机控制步进电机。
图1是35BY型永磁步进电机的外形图,图2是该电机的接线图,从图中可以看出,电机共有四组线圈,四组线圈的一个端点连在一起引出,这样一共有5根引出线。要使用步进电机转动,只要轮流给各引出端通电即可。将COM端标识为C,只要AC、C、BC、C,轮流加电就能驱动步进电机运转,加电的方式可以有多种,如果将COM端接正电源,那么只要用开关元件(如三极管),将A、、B、轮流接地。
下表列出了该电机的一些典型参数:
表135BY48S03型步机电机参数
型号步距角相数电压电流电阻最大静转距定位转距转动惯量
35BY48S03 7.5 4 12 0.26 47 180 65 2.5
有了这些参数,不难设计出控制电路,因其工作电压为12V,最大电流为0.26A,因此用一块开路输出达林顿驱动器(ULN2003)来作为驱动,通过P1.4~P1.7来控制各线圈的接通与切断,电路如图3所示。
开机时,P1.4~P1.7均为高电平,依次将P1.4~P1.7切换为低电平即可驱动步进电机运行,注意在切换之前将前一个输出引脚变为高电平。如果要改变电机的转动速度只要改变两次接通之间的时间,而要改变电机的转动方向,只要改变各线圈接通的顺序。
图135BY48S03型步进电机外形图
图235BY48S03型步进电机的接线图
图3单片机控制35BY48S03型步进电机的电路原理图
三、步进电机的驱动实例
要求:控制电路如图3所示,开机后,电机不转,按下启动键,电机旋转,速度为25转/分,按下加1键,速度增加,按下减1键,速度降低,最高速度为100转/分,最低转带为25转/分,按下停止键,电机停转。速度值要求在数码管上显示出来。
1.要求分析
按上面的分析,改变转速,只要改变P1.0~P1.3轮流变低电平的时间即可达到要求,这个时间不应采用延时来实现,因为会影响到其他功能的实现。这里以定时的方式来实现。下面首先计算一下定时时间。按要求,最低转速为25转/分,而上述步进电机的步距角为7.5,即每48个脉冲为1周,即在最低转速时,要求为1200脉冲/分,相当于50ms/脉冲。而在最高转速时,要求为100转/分,即48000脉冲/分,相当于12.5ms/脉冲。可以列出下表
表1步进电机转速与定时器定时常数关系
速度单步时间(us) TH1 TL1 实际定时(us)
25 50000 76 0 49996.8
26 48077 82 236 48074.18
27 46296 89 86 46292.61
28 44643 95 73 44640.155
… … … … …
100 12500 211 0 12499.2
表中不仅计算出了TH1和TL1,而且还计算出了在这个定时常数下,真实的定时时间,可以根据这个计算值来估算真实速度与理论速度的误差值。
表中TH1和TL1是根据定时时间算出来的定时初值,这里用到的晶振是11.0592M。有了上述表格,程序就不难实现了,使用定时/计数器T1为定时器,定时时间到后切换输出脚即可。
2.程序实现
定义DSB-1A实验板的S1为启动键,S2为停止键,S3为加1键,S4为减1键,程序如下:
StartEnd bit 01H ;起动及停止标志
MinSpd EQU 25 ;起始转动速度
MaxSpd EQU 100 ;最高转动速度
Speed DATA 23H ;流动速度计数
DjCount DATA 24H ;控制电机输出的一个值,初始为11110 111
Hidden EQU 10H ;消隐码
Counter DATA 57H ;显示计数器
DISPBUF DATA 58H ;显示缓冲区
ORG 0000H
AJMP MAIN
ORG 000BH
JMP DISP
ORG 001BH
JMP DJZD
ORG 30H
MAIN:
MOV SP,#5FH
MOV P1,#0FFH
MOV A,#Hidden
MOV DispBuf,A
MOV DispBuf+1,A
MOV DispBuf+2,A
MOV DjCount,#11110111B
MOV SPEED,#MinSpd ;起始转动速度送入计数器CLR StartEnd ;停转状态
MOV TMOD,#00010001B ;
MOV TH0,#HIGH(65536-3000)
MOV TL0,#LOW(65536-3000)
MOV TH1,#0FFH;
MOV TL1,#0FFH
SETB TR0
SETB EA
SETB ET0
SETB ET1
LOOP: ACALL KEY ;键盘程序
JNB F0,m_NEXT1 ;无键继续
ACALL KEYPROC ;否则调用键盘处理程序
m_NEXT1:
MOV A,Speed
MOV B,#10
DIV AB
MOV DispBuf+5,B ;最低位
MOV B,#10
DIV AB
MOV DispBuf+4,B
MOV DispBuf+3,A
JB StartEnd,m_Next2
CLR TR1 ;关闭电机
JMP LOOP
ORL P1,#11110000B
m_Next2:
SETB TR1 ;启动电机
AJMP LOOP ;主程序结束
;---------------------------------------
D10ms:
……
;---------延时程序,键盘处理中调用
KEYPROC:
MOV A,B ;获取键值
JB ACC.2,StartStop ;分析键的代码,某位被按下,则该位为1 JB ACC.3,KeySty
JB ACC.4,UpSpd
JB ACC.5,DowS pd
AJMP KEY_RET
StartStop:
SETB StartEnd ;启动
AJMP KEY_RET
KeySty:
CLR StartEnd; ;停止
AJMP KEY_RET
UpS pd:
INC SPEED;
MOV A,SPEED
CJNE A,#MaxSpd,K1 ;到了最多的次数?
DEC SPEED ;是则减去1,保证下次仍为该值
K1:
AJMP KEY_RET
DowSpd:
DEC SPEED
MOV A,SPEED
CJNE A,#MAXSPD,KEY_RET ;不等(未到最大值),返回MOV SPEED,#MinSpd;
KEY_RET:
RET
KEY:
……获取键值的程序
RET
DjZd: ;定时器T1用于电机转速控制
PUSH ACC
PUSH PSW
MOV A,Speed
SUBB A,#MinSpd ;减基准数
MOV DPTR,#DjH
MOV C A,@A+DPTR
MOV TH1,A
MOV A,Speed
SUBB A,#MinSpd
MOV DPTR,#DjL
MOV C A,@A+DPTR
MOV TL1,A
MOV A,DjCount
CPL A
ORL P1,A
MOV A,DjCount
JNB ACC.7,d_Next1
JMP d_Next2
d_Next1:
MOV DjCount,#11110111B
d_Next2:
MOV A,DjCount
RL A
MOV DjCount,A ;回存
ANL P1,A
POP PSW
POP ACC
RETI
DjH: DB 76,82,89,95,100,106,110,115,119,123,12……DjL: DB 0,236,86,73,212,0,214,96,163,165
……
DISP: ;显示程序
POP PSW
POP ACC
……
RETI
BitTab: DB 7Fh,0BFH,0DFH,0EFH,0F7H,0FBH
DISPTAB:DB 0C0H,0F9H,0A4H,0B0H,99H,92H,82H,0F8H,80H,90H,88H,83H,0C6H,0A1H,86H,8EH,0FFH END
3.程序分析
本程序主要由键盘程序、显示器程序、步进电机驱动程序三部份组成,主程序首先初始化各变量,将显示器的高3位消隐,步进电机驱动的各引脚均输出高电平,然后调用键盘程序,并作判断,如果有键按下,则调用键盘处理程序,否则直接转下一步。下一步是将当前的转速值转换为BCD码,送入显示缓冲区;接着判断StartEnd这个位变量,是“1”还是“0”,如果是“1”,则开启定时器T1,否则关闭定时器
T1,为防止关闭时某一相线圈长期通电,因此,在关闭定时器T1时,将P1.0~P1.3均置高。至此,主程序的工作即结束。这里为简便起见,这里没有做高位“0”消隐的工作,即如果速度为10转/分,则显示值“010”,读者可以自行加入相关的代码来处理这一工作。
步进电机的驱动工作是在定时器T1的中断服务程序中实现的,由前述分析,每次的定时时间到达以后,需要将P1.0~P1.3依次接通,程度中用了一个变量DjCntr来实现这一功能,在主程序初始化时,该变量被赋予初值11110111B,进入到定时中断以后,将该变量取出送ACC累加器,并在累加器中进行左移,这样,该数值就变为1110 1111,然后将该数与P1相“与”,此时,P1.4即输出低电平,第二次进入中断时,先将该数取反,成为00010000,然后将该数与P1相“或”,这样,P1.4即输出高电平,关断了相应的线圈,然后将该数重新取出,并作左移,即1110,1111右移成为11011111,将该数与P1相“与”,这样P1.5即输出低电平,依次类推,P1.7~P1.4即循环输出低电平。当这一数据变为0111 1111后,需要作适当的改动,将数据重新变回11110111,进行第二次循环,相关代码,请读者自行分析。
定时时间又是如何确定的呢?这里用的是查表的方法,首先用Excel计算得出在每一种转速下的TH
值和TL值,然后,分别放入DjH和DjL表中,在进入T1中断程序之后,将速度值变量Speed送入累加器ACC,然后减去基数25,使其基数从0开始计数,然后分别查表,送入TH1和TL1,实现重置定时初值的目的。
看完这一部份内容以后,请读者自行完成以下工作:
1.更改程序,将S1定义为“启动/停止”,而S2定义为“方向”,按下S2,切换电机旋转方向。
2.更改程序,要求转速从1到100。
3.更改程序,实现首位无效零消隐。
能正传,反转,加速,减速
#include "reg52.h"
int delay();
void inti_lcd();
void show_lcd(int);
void cmd_wr();
void ShowState();
void clock(unsigned int Delay) ;
void DoSpeed(); //计算速度
//正转值
#define RIGHT_RUN 1
//反转值
#define LEFT_RUN 0
sbit RS=0xA0;
sbit RW=0xA1;
sbit E=0xA2;
char SpeedChar[]="SPEED(n/min):";
char StateChar[]="RUN STATE:";
char STATE_CW[]="CW";
char STATE_CCW[]="CCW";
char SPEED[3]="050";
unsigned int RunSpeed=50; //速度
unsigned char RunState=RIGHT_RUN; //运行状态
main()
{
/*定时器设置*/
TMOD=0x66; //定时器0,1都为计数方式;方式2;EA=1; //开中断
TH0=0xff; //定时器0初值FFH;TL0=0xff;
ET0=1;
TR0=1;
TH1=0xff; //定时器1初值FFH;TL1=0xff;
ET1=1;
TR1=1;
IT0=1; //脉冲方式
EX0=1; //开外部中断0:加速
IT1=1; //脉冲方式
EX1=1; //开外部中断1:减速
inti_lcd();
DoSpeed();
ShowState();
while(1)
{
clock(RunSpeed);
P0_1=P0_1^0x01;
}
}
//定时器0中断程序:正转
void t_0(void) interrupt 1
{
RunState=RIGHT_RUN;
P0_0=1;
P1=0x01;
cmd_wr();
ShowState();
}
//定时器1中断:反转
void t_1(void) interrupt 3
{
RunState=LEFT_RUN;
P0_0=0;
cmd_wr();
ShowState();
}
//中断0:加速程序
void SpeedUp() interrupt 0
{
if(RunSpeed>=12)
RunSpeed=RunSpeed-2;
DoSpeed();
P1=0x01;
cmd_wr();
ShowState();
}
//中断1:减速程序
void SpeedDowm() interrupt 2
{
if(RunSpeed<=100)
RunSpeed=RunSpeed+2;
DoSpeed();
P1=0x01;
cmd_wr();
ShowState();
}
int delay() //判断LCD是否忙{
int a;
start:
RS=0;
RW=1;
E=0;
for(a=0;a<2;a++);
E=1;
if(P1_7==0)
return 0;
else
goto start;
}
void inti_lcd() //设置LCD方式
{
P1=0x38;
cmd_wr();
delay();
P1=0x01; //清除
cmd_wr();
delay();
P1=0x0f;
cmd_wr();
delay();
P1=0x06;
cmd_wr();
delay();
P1=0x0c;
cmd_wr();
delay();
}
void cmd_wr() //写控制字{
RS=0;
RW=0;
E=0;
E=1;
}
void show_lcd(int i) //LCD显示子程序{
P1=i;
RS=1;
RW=0;
E=0;
E=1;
}
void ShowState() //显示状态与速度{
int i=0;
while(SpeedChar[i]!='\0')
{
delay();
show_lcd(SpeedChar[i]);
i++;
}
delay();
P1=0x80 | 0x0d;
cmd_wr();
i=0;
while(SPEED[i]!='\0')
{
delay();
show_lcd(SPEED[i]);
i++;
}
delay();
P1=0xC0;
cmd_wr();
i=0;
while(StateChar[i]!='\0')
{
delay();
show_lcd(StateChar[i]);
i++;
}
delay();
P1=0xC0 | 0x0A;
cmd_wr();
i=0;
if(RunState==RIGHT_RUN)
while(STATE_CW[i]!='\0')
{
delay();
show_lcd(STATE_CW[i]);
i++;
}
else
while(STATE_CCW[i]!='\0')
{
delay();
show_lcd(STATE_CCW[i]);
i++;
}
}
void clock(unsigned int Delay) //1ms延时程序
{ unsigned int i;
for(;Delay>0;Delay--)
for(i=0;i<124;i++);
}
void DoSpeed()
{
SPEED[0]=(1000*6/RunSpeed/100)+48;
SPEED[1]=1000*6/RunSpeed%100/10+48;
SPEED[2]=1000*6/RunSpeed%10+48;
}
ULN2003A
帮忙识别一款步进电机
浏览次数:996次悬赏分:100|解决时间:2008-12-28 14:47 |提问者:gaosch
我有一款步进电机,其实是一块板子,是沈飞电子公司产的,上面有一个步进电机和一个直流电机,步进电机上面有这样的表示:PM42S-0480-SKA9
3873滚珠丝杠电机选型计算 设计要求: 夹具加工件重量:W1=300kg 提升部位重量:W2=100kg 行走最大行程:S= 1200mm 最大速度:V=20000mm/min 使用寿命:Lt=20000h 滑动阻力:u=0。01 电机转数:N=1333RPM 运转条件: v(m/min) 加速下降时间:T1=0.75S 匀速下降时间T2=3S 减速下降时间T3=0.75S t(sec) 加速上升时间T4=0.75S 匀速上升时间T5=3S 减速上升时间T6=0.75S 匀速下降3s 1,螺杆轴径,导程,螺杆长度选定 a:导程(l) 由电机最高转数可得
L大于或等于V/N=20000/1333=15mm 即导程要大于15mm,根据THK样本得导程16mm 即L=16mm b:轴负荷计算 1,加速下降段 a1=V/T=20000/60X0.75=444(mm/s2)=0.444m/s2 f=u(W1+W2)xG=0.01(300+100)x9.8=40N F1=(W1+W2)xG-f-(W1+W2)xa1=(300+100)x9.8-40-(300+100)x0.444=3702N 2,匀速下降段 F2=(W1+W2)xG-f=(300+100)x9.8-40=3880N 3减速下降段 F3=(W1+W2)xG-f+(W1+W2)xa1=(300+100)x9.8-40+(300+100)x0.444=4058N 4 加速上升段 F4=(W1+W2)xG+f+(W1+W2)xa1=(300+100)x9.8+40+(300+100)x0.444=4137N 5,匀速上升段 F5=(W1+W2)xG+f=(300+100)x9.8+40=3960N
含电动机电路分析(计算题) 1.如图所示,电源电动势E =8 V ,内电阻为r =0.5 Ω,“3 V ,3 W”的灯泡L 与电动机M 串联接在电源上,灯泡刚好正常发光,电动机刚好正常工作,电动机的线圈电阻R 0=1.5 Ω.求: (1)通过电动机的电流; (2)电动机的机械效率。 1、解析(1)A R U I L L 1== (2)电动机两端的电压 U = E -Ir -U L = 4V 电动机消耗的电功率 P= UI = 4W 电动机的输出功率 P 出= P -I 2R 0 = 2.5W 电动机的机械效率 %100?=P P 出η= 62.5% 2.如图所示,电路中的电阻R =10 Ω,电动机的线圈电阻r =1 Ω,加在电路两端的电压U =100 V .已知电流表读数为30 A ,则通过电动机线圈的电流为多少?电动机输出功率为多少? 2、解析 R 中的电流I 1=U R =10 A , 电动机中的电流I 2=I -I 1=20 A , 输入功率P =I 2U =2×103 W , 电热功率P 热=I 2r 2=400 W , 输出功率P 出=P -P 热=1 600 W. 3.如图所示,电源的电动势E =7.5 V ,内阻r =1.0 Ω,定值电阻R 2=12 Ω,电动机M 的线圈的电阻R =0.50 Ω.闭合开关S ,电动机转动稳定后,电压表的示数U 1=4 V ,电阻R 2消耗的电功率P 2=3.0 W .求电动机转动稳定后: (1)电路的路端电压. (2)通过电动机的电流. 3、解:(1)路端电压等于R 2两端的电压,由R U P 2 =得 V .06 V 120.3222=?===R P U U (2)电源的电动势E = U 2+Ir , 由此得干路电流 A 5.1 A 0 .10.65.72=-=-= r U E I 通过R 2的电流A 5.0 A 120.6222===R U I 通过电动机的电流I 1 = I -I 2 =(1.5-0.5)A=1.0 A
标准编号标准名称 GB12350-2009 电动机的安全要求 GB/T22670-2008 变频器供电三相笼型感应电动机试验方法 GB/T22672-2008 小功率同步电动机试验方法 GB/T23640-2009 往复式内燃机(RIC)驱动的交流发电机 GB/T22714-2008 交流低压电机成型绕组匝间绝缘试验规范 GB/T22715-2008 交流电机定子成型线圈耐冲击电压水平 GB/T22717-2008 电机磁极线圈及磁场绕组匝间绝缘试验规范 GB/T22718-2008 高压电机绝缘结构耐热性评定方法 GB/T22719.1-2008 交流低压电机散嵌绕组匝间绝缘第1部分:试验方法GB/T22719.2-2008 交流低压电机散嵌绕组匝间绝缘第2部分:试验限值 GB/T22720.1-2008 旋转电机电压型变频器供电的旋转电机Ⅰ型电气绝缘结构的鉴别和型式试验 GB10068-2008 轴中心高为56 mm及以上电机的机械振动振动的测量、评定及限值 GB10069.3-2008 旋转电机噪声测定方法及限值第3部分: 噪声限值GB755-2008 旋转电机定额和性能 GB/T7060-2008 船用旋转电机基本技术要求 GB/T12351-2008 热带型旋转电机环境技术要求 GB/T12665-2008 电机在一般环境条件下使用的湿热试验要求 GB/T2900.25-2008 电工术语旋转电机 GB/T13002-2008 旋转电机热保护 GB/T997-2008 旋转电机结构型式、安装型式及接线盒位置的分类(IM代码) JB/T10922-2008 高原铁路机车用旋转电机技术要求 JB/T2728.1-2008 电机用气体冷却器第1部分:一般规定 JB/T2728.2-2008 电机用气体冷却器第2部分:穿片式气体冷却器技术要求JB/T2728.3-2008 电机用气体冷却器第3部分:挤片式气体冷却器技术要求JB/T2728.4-2008 电机用气体冷却器第4部分:绕片式气体冷却器技术要求JB/T2728.5-2008 电机用气体冷却器第5部分:绕簧式气体冷却器技术要求JB/T8439-2008 使用于高海拔地区的高压交流电机防电晕技术要求 GB/T17948.6-2007 旋转电机绝缘结构功能性评定成型绕组试验规程绝缘结构热机械耐久性评定 GB/T17948.5-2007 旋转电机绝缘结构功能性评定成型绕组试验规程多因子功能性评定50MVA、15kV及以下电机绝缘结构热、电综合应力耐久性 GB/T21205-2007 旋转电机整修规范 GB/T21209-2007 变频器供电笼型感应电动机设计和性能导则
一、电动机的选择 1、空气压缩机电动机的选择 1.1电动机的选择 (1)空压机选配电动机的容量可按下式计算 P=Q(Wi+Wa) ÷1000ηηi2 (kw) 式中P——空气压缩机电动机的轴功率,kw Q——空气压缩机排气量,m3/s η——空气压缩机效率,活塞式空压机一般取0.7~0.8(大型空压机取大值,小型空压机取小值),螺杆式空压机一般取0.5~0.6 ηi——传动效率,直接连接取ηi=1;三角带连接取ηi=0.92 Wi——等温压缩1m3空气所做的功,N·m/m3 Wa——等热压缩1m3空气所做的功,N·m/m3 Wi及Wa的数值见表 Wi及Wa的数值表(N·m/m3) 1.2空气压缩机年耗电量W可由下式计算 W= Q(Wi+Wa)T ÷1000ηηiηmηs2 (kw·h) 式中ηm——电动机效率,一般取0.9~0.92 ηs ——电网效率,一般取0.95 T ——空压机有效负荷年工作小时
2、通风设备电动机的选择 (1)通风设备拖动电动机的功率可按下式计算 P=KQH/1000ηηi (kw) 式中K——电动机功率备用系数,一般取1.1~1.2 Q——通风机工况点风量,m3/s H——通风机工况点风压轴流式通风机用静压,离心式通风机用全压,Pa η——通风机工况点效率,可由通风机性能曲线查得 ηi——传动效率,联轴器传动取0.98,三角带传动取0.92 (2)通风机年耗电量W可用下式计算 W=QHT/1000ηηiηmηs 式中ηm——电动机效率, ηs ——电网效率,一般取0.95 T ——通风机全年工作小时数 3、矿井主排水泵电动机的选择 (1)电动机的选择 排水设备拖动电动机的功率可按下式计算 P=KγQH/1000η (kw) 式中K——电动机功率备用系数,一般取1.1~1.5 γ——矿水相对密度,N/m3 Q ——水泵在工况点的流量,m3/s H ——水泵在工况点的扬程,m
怎样正确选择电动机的功率? 来源:电动车高速电机,高速无刷电机,电动车配件-宁波市鄞州恒泰机电有限公司 电动机的功率.应根据生产机械所需要的功率来选择,尽量使电动机在额定负载下运行。选择时应注意以下两点:(1>如果电动机功率选得过小.就会出现“小马拉大车”现象,造成电动机长期过载.使其绝缘因发热而损坏.甚至电动机被烧毁。 (2)如果电动机功率选得过大.就会出现“大马拉小车”现象.其输出机械功率不能得到充分利用,功率因数和效率都不高,不但对用户和电网不利。而且还会造成电能浪费。 要正确选择电动机的功率,必须经过以下计算或比较: (1)对于恒定负载连续工作方式,如果知道负载的功率(即生产机械轴上的功率)Pl(kw).可按下式计算所需电动机的功率 P(kw):P=P1/n1n2式中n1为生产机械的效率;n2为电动机的效率。即传动效率。 按上式求出的功率,不一定与产品功率相同。因此.所选电动机的额定功率应等于或稍大于计算所得的功率。 例:某生产机械的功率为3.95kw.机械效率为70%、如果选用效率为0.8的电动机,试求该电动机的功率应为多少
kw? 解:P=P1/ n1n2=3.95/0.7*0.8=7.1kw 由于没有7.1kw这—规格.所以选用7.5kw的电动机。(2)短时工作定额的电动机.与功率相同的连续工作定额的电动机相比.最大转矩大,重量小,价格低。因此,在条件许 可时,应尽量选用短时工作定额的电动机。 (3)对于断续工作定额的电动机,其功率的选择、要根据负载持续率的大小,选用专门用于断续运行方式的电动机。负载持续串Fs%的计算公式为 FS%=tg/(tg+to)×100%式中tg为工作时间,t。为停止时间min;tg十to为工作周期时间min。 此外.也可用类比法来选择电动机的功率。所谓类比法。就是与类似生产机械所用电动机的功率进行对比。具体做法是:了解本单位或附近其他单位的类似生产机械使用多大功率的电动机,然后选用相近功率的电动机进行试车。试车的目的是验证所选电动机与生产机械是否匹配。验证的方法是:使电动机带动生产机械运转,用钳形电流表测量电动机的工作电流,将测得的电流与该电动机铭牌上标出的额定电流进行对比。如果电功机的实际工作电流与铭脾上标出的额定电流上下相差不大.则表明所选电动机的功率合适。如果电动机的实际工作电流比铭牌上标出的额定电流低70%左右.则表明电动机的功率选得过大(即“大马拉
含电动机电路的计算专题练习 班级姓名成绩 1.“220V、5.5kW”的电动机,线圈电阻为0.4Ω,它在正常工作时的电流为__ _ ___A,1s 钟内产生的热量是__ ____J,1s内有___ ___J的电能转化为机械能。 2.一个直流电动机所加电压为U,电流为 I,线圈内阻为 R,当它工作时,下述说法中错误的是() A 电动机的输出功率为U2/R B 电动机的发热功率为I2R C 电动机的输出功率为IU- I2R D 电动机的功率可写作IU= I2R= U2/R 3.一台电阻为2Ω的电动机,接在110V电路中工作时,通过电动机的电流为10A,则这台电动机消耗的电功率为______ ,发热功率为______ ,转化成机械功率为______ ,电动机的效率为______。4.如图电路中,电阻R = 2Ω,电动机内阻r = 4Ω,电压U AB = 60 V,电 压表示数为50V,则电动机消耗的电功率为,电动机输出的 机械功率为(电动机机械损耗不计)。 5.一只电炉的电阻丝和一台电动机线圈电阻相同,都为 R。设通过它们的 电流相同(电动机正常运转),则在相同的时间内,下述说法中不正确的是():A.电炉和电动机产生的电热相等 B.电动机消耗的功率大于电炉消耗的功率 C.电炉两端电压小于电动机两端电压 D.电炉和电动机两端电压相等 6.一台电动机的输出功率是10kW,这表明该电动机工作时( ). (A)每秒消耗10kw电能(B)每秒对外做10kw功 (C)每秒消耗10kJ电能(D)每秒对外做10kJ功 7.一台电动机的电阻为4Ω,在220V的额定电压下运行时,发热消耗的电功率为400W.若电动机工作5min,则电流做功_____ ___J. 8.电动机的线圈阻值为R,电动机正常工作时,两端的电压为U,通过的电流为I,工作时间为t,下列说法中正确的是( ). (A)电动机消耗的电能为UIt (B)电动机消耗的电能为I2Rt (C)电动机线圈产生的热量为I2Rt (D)电动机线圈产生的热量为U2t/R 9. 某一用直流电动机提升重物的装置,如图所示,重物的质量m=50千克,电路的电压是110伏,不计各处磨擦,当电动机以V=0.9m/s的恒定速度向上提升重物时,电路中的电流强度I=5安,由此可知,电动机线圈的电阻R= 欧(g取10m/s2) 10.有一个直流电动机,把它接入0.2伏电压的电路中,电机不转,测得流过 电动机的电流是0.4安;若把电动机接入2.0伏电压的电路中,电动机正常 工作,工作电流是1.0安,求电动机正常工作时的输出功率多大?如果在电 动机正常工作时,转子突然被卡住,电动机的发热功率多大?
三相异步电动机基本知识 1电机概述 电机的型式很多,但其工作原理都基于电磁感应定律和电磁力定律。因此,电机构造的一般原则是:用适当的有效材料(导磁和导电材料)构成能互相进行电磁感应的磁路和电路,以产生电磁功率和电磁转矩,达到转换能量形态的目的。 为了减少激磁电流和旋转磁场在铁心中产生的涡流和磁滞损耗,铁心有0.5mm厚的 硅钢片叠压而成。硅钢片绝缘层的作用?笼型转子结构简单、制造方便。对要求启动电流小、启动转矩大的电机,可以采用绕线式电机。 按电机功能来分,可分为: ①发电机——把机械能转换成电能; ②电动机——把电能转换成机械能; ③变压器、变频机、变流机、移相器——分别用于改变电压、频率、电流相位。 ④控制电机——作为控制系统中的元件。 又可按以下方法分类: 下面主要讲述高压中大型三相异步电机 S=ns-n/ns 2电机型号、结构及分类 2.1分类
a)按中心高分类 可分为微型电机、小型电机、中型电机、大型电机。一般来说,H80以下的称为 微型电机(也叫分马力电机,功率在1kW以下),H80?H315的称为小型电机,H355?H630的称为中型电机,H710?H1000的称为大型电机。 b)按防护等级分类 基本上可分为开启式、防护式和封闭式电机。开启式电机的常用结构是IP11,防护式电机的常用结构是和IP22、IP23,封闭式电机的常用结构是IP44和IP54。 IP是International Protection的意思,紧跟其后的第一个数字表示电机防护固体的能力(0-无防护;1-防护大于50mm的固体;2-防护大于12mm的固体;3-防护大于2.5mm 的固体;4-防护大于1mm的固体;5-防尘。),第二个数字表示电机防水的能力(0-无防护电机;1-防滴电机;2-15°防滴电机;3-防淋水电机;4-防溅水电机;5-防喷水电机;6-防海浪电机;7-防浸水电机;8-潜水电机)。 请参考标准GB4942.1-85《电机外壳防护分级》。 c)按安装方式分类 总体上可分为卧式电机和立式电机。 卧式电机的典型结构是IMB3,其余派生结构有IMB35、IMB5等。立式电机的典型结构是IMV1(把IMB5立起来装即可,轴伸朝下),其余派生结构有IMV15(把IMB35 立起来装即可,轴伸朝下)等。 IM 即International Mounting。 请参考标准GB997-2008《电机结构及安装型式代号》。(IEC60034-7:2001) 旋转电机的结构形式、安装形式及接线盒位置---IM代码。 结构形式:有关固定用构件、轴承装置和轴伸等电机部件的构成形式。 1根据负载类型选择不同的冷却方式
电机功率的正确选择 电机的功率.应根据生产机械所需要的功率来选择,尽量使电机在额定负载下运行。选择时应注意以下两点: (1>如果电机功率选得过小.就会出现“小马拉大车”现象,造成电机长期过载.使其绝缘因发热而损坏.甚至电机被烧毁。 (2)如果电机功率选得过大.就会出现“大马拉小车”现象.其输出机械功率不能得到充分利用,功率因数和效率都不高(见表),不但对用户和电网不利。而且还会造成电能浪费。 要正确选择电机的功率,必须经过以下计算或比较: (1)对于恒定负载连续工作方式,如果知道负载的功率(即生产机械轴上的功率)Pl(kw).可按下式计算所需电机的功率P(kw): P=P1/n1n2 式中n1为生产机械的效率;n2为电机的效率。即传动效率。按上式求出的功率,不一定与产品功率相同。因此.所选电机的额定功率应等于或稍大于计算所得的功率。 例:某生产机械的功率为3.95kw.机械效率为70%、如果选用效率为0.8的电机,试求该电机的功率应为多少kw? 解:P=P1/ n1n2=3.95/0.7*0.8=7.1kw 由于没有7.1kw这—规格.所以选用7.5kw的电动机。 (2)短时工作定额的电机.与功率相同的连续工作定额的电动机相比.最大转矩大,重量小,价格低。因此,在条件许可时,应尽量选用短时工作定额的电机。 (3)对于断续工作定额的电机,其功率的选择、要根据负载持续率的大小,选用专门用于断续运行方式的电机。负载持续串Fs%的计算公式为FS%=tg/(tg+to)×100%式中tg为工作时间,t。为停止时间min;tg十to为工作周期时间min。 此外.也可用类比法来选择电机的功率。所谓类比法。就是与类似生产机械所用电机的功率进行对比。具体做法是:了解本单位或附近其他单位的类似生产机械使用多大功率的电机,然后选用相近功率的电机进行试车。试车的目的是验证所选电机与生产机械是否匹配。验证的方法是:使电机带动生产机械运转,用钳形电流表测量电动机的工作电流,将测得的电流与该电机铭牌上标出的额定电流 进行对比。如果电机的实际工作电流与铭脾上标出的额定电流上下相差不大.则表明所选电机的功率合适。如果电机的实际工作电流比铭牌上标出的额定电流低70%左右.则表明电机的功率选得过大(即“大马拉小车”应调换功率较小的电动机。如果测得的电机工作电流比铭牌上标出的额定电流大40%以上.则表明电动机的功率选得过小(即"小马拉大车"),应调换功率较大的电机. 表: 负载情况空载1/4负载1/2负载3/4负载满载 功率因数0.2 0.5 0.77 0.85 0.89 效率0 0.78 0.85 0.88 0.895
GB755-87旋转电机基本技术要求-hnxxsgx(1)
GB755-87旋转电机基本技术要求-hnxxsgx(1)
旋转电机基本技术要求GB 755-87 中华人民共和国国家标准 UDC 621.313 旋转电机 基本技术要求GB 755-87 General requirements for rotating electrical machines代替GB 755-81 本标准参照采用IEC34-1(1983)《旋转电机定额和性能》。 1适用范围 本标准适用于各种类型的旋转电机(以下简称电机),但控制电机及牵引电机除外。 各类型电机凡有本标准未规定的附加要求时,应在该类型电机的标准中作补充规定。 某些类型电机如在本标准的某些条文上有特殊要求时,应在该类型电机的产品标准中作特殊规定。
2术语定义 本标准所用的一般术语的定义按GB 2900.25《电工名词术语电机》的规定。 本标准专用的术语的定义如下: 2.1定额 由制造厂对符合指定条件的电机所规定的,并在铭牌上标明的电量和机械量的全部数值及其持续时间和顺序。 2.2定额值 定额中的某一量值。 2.3额定输出功率 定额中的输出功率值。 2.4负载 表示电机在某一瞬间供给一个电路或一台机械所需要的电量或机械量的全部数值。 2.5空载(运行) 电机处于无功率输出的旋转状态(他均处于其正常运行条件)。 2.6满载 对电机在额定输出运行时所规定的负载的最大值。 2.7满载功率
对电机在额定输出运行时所规定的功率最大值。 注:这一概念也适用于转矩、电流和转速等。2.8断能停转 切断全部电能或机械能的输入,并完全停止运动。 2.9工作制 电机承受负载情况的说明,包括起动、电制动、空载、断能停转以及这些阶段的持续时间和先后顺序。 2.10工作制类型 在规定持续时间内由一种或多种恒定负载所组成的连续、短时或周期工作制;或者是负载和转速通常在允许运行范围内变化的非周期工作制。 2.11热稳定 电机发热部件的温升在一小时内的变化不超过2k的状态。 2.12负载持续率 负载时间(包括起动和电制动)与工作周期的持续时间之比,以百分数表示。 2.13堵转转矩 电动机在额定电压、额定频率和转子堵住时测得的最小转矩。
步进电机的计算与选型 对于步进电动机的计算与选型,通常可以按照以下几个步骤: 1) 根据机械系统结构,求得加在步进电动机转轴上的总转动惯量eq J ; 2) 计算不同工况下加在步进电动机转轴上的等效负载转矩eq T ; 3) 取其中最大的等效负载转矩,作为确定步进电动机最大静转矩的依据; 4) 根据运行矩频特性、起动惯频特性等,对初选的步进电动机进行校核。 1. 步进电动机转轴上的总转动惯量eq J 的计算 加在步进电动机转轴上的总转动惯量eq J 是进给伺服系统的主要参数之一,它对选择电动机具有重要意义。eq J 主要包括电动机转子的转动惯量、减速装置与滚珠丝杠以及移动部件等折算到电动机转轴上的转动惯量等。 2. 步进电动机转轴上的等效负载转矩eq T 的计算 步进电动机转轴所承受的负载转矩在不同的工况下是不同的。通常考虑两种情况:一种情况是快速空载起动(工作负载为0),另一种情况是承受最大工作负载。 (1)快速空载起动时电动机转轴所承受的负载转矩eq1T eq1amax f 0T =T +T +T (4-8) 式中 amax T ——快速空载起动时折算到电动机转轴上的最大加速转矩,单位为N ·m ; f T ——移动部件运动时折算到电动机转轴上的摩擦转矩,单位N ·m ; 0T ——滚珠丝杠预紧后折算到电动机转轴上的附加摩擦转矩,单位为N ·m 。 具体计算过程如下: 1)快速空载起动时折算到电动机转轴上的最大加速转矩: amax eq 2T =J =60eq m a J n t πε (4-9) 式中 eq J ——步进电动机转轴上的总转动惯量,单位为2kg m ?; ε——电动机转轴的角加速度,单位为2/rad s ; m n ——电动机的转速,单位r/min ; a t ——电动机加速所用时间,单位为s ,一般在0.3~1s 之间选取。 2)移动部件运动时折算到电动机转轴上的摩擦转矩: f T =2F i πη摩h P (4-10)
A.请问如何选变频器,比如我的电机功率5.5千瓦,4级的1470转 型号:WGB2-5.5KW/3是什么意思 答: 1.看功率选就行,电机5.5Kw,选变频器就选6Kw的。必须多一点。这样变 频器不爱坏! 2.220V单相进线,380V三相出线 3.选变频器要看你用的场合,一般你选5.5KW就行,要是用到机床,提升机 等地方就要增加了。 4.我决的主要问题是在选电机上,因为它要考虑负载 变频器的选型,注意两点就OK了 1.电机的额定电流 2.电机的功率 2.电机的极数 补充知识,Other answer: 1.变频器一般向下兼容两个功率等级, 比如7.5kw的变频器兼容3.7kw到7.5kw之间的电机, 但是只有当7.5kw的变频器带7.5kw的电机,发挥性能才是最佳的, 一般来说,随着变频器带的电机功率越来越小,性能会逐渐变差。 所以为保证性能,一般不用变频器带两个功率等级以下的电机。 2.电机的容量是变频器的50%-100%的都可以用,选容量大一些儿的不易出现过载,可以提高启动转矩,尤其是起重上用 B.变频器选型风机用电机功率28KW 电流55A ----question 要求是风机专用变频器,比如西门子mm430就是,然后再选择功率,可以选择大于等于这个输出功率和输出电流的变频器即可。 C.变频器如何控制电机功率 电机在变频器的控制下以低频率运行时,变频器的输出电压会随着频率的降低而降低,但电机定子阻值不变,为什嬷电流却和工频运行时差不多,与频率有关系吗?望各位高手赐教,不胜感激! 问题补充: 比如V/F控制时以10赫兹运行,变频器的输出电压只有75~80伏左右,但电流却和工频时差不多,为什么? Answer: 1.变频器控制的电机基本都是交流电机,交流电机转速是由电压频率决定的,国内都是50HZ,所以普通电机转速都是50转/秒。也就是3000转/分,有一定误差。变频器原理就是先把交流变成直流,然后再用单片机控制6个晶闸管把直流再变回交流,根据你的设定值来决定这6个晶闸管开关的速度,来输出不同频率的交流电,从而控制电机转速。 所以电压应该不会变,只是频率变了。电压不变电流也就不会变。 2.当电机转矩一定时,电机的输出功率与转速成正比,当频率降低时,电机的输出功率自然降低。
电机选型-总结版 电机选型需要计算工作扭矩、启动扭矩、负载转动惯量,其中工作扭矩和启动扭矩最为重要。 1工作扭矩T b计算: 首先核算负载重量W,对于一般线形导轨摩擦系数μ=0.01,计算得到工作力F b。 水平行走:F b=μW 垂直升降:F b=W 1.1齿轮齿条机构 一般齿轮齿条机构整体构造为电机+减速机+齿轮齿条,电机工作扭矩T b的计算公式为: T b=F b?D 2 其中D为齿轮直径。 1.2丝杠螺母机构 一般丝杠螺母机构整体构造为电机+丝杠螺母,电机工作扭矩T b 的计算公式为: T b=F b?BP 2πη 其中BP为丝杠导程;η为丝杠机械效率(一般取0.9~0.95,参考下式计算)。 η=1?μ′?tanα1+μ′ tanα
其中α为丝杠导程角;μ’为丝杠摩擦系数(一般取0.003~0.01,参考下式计算)。 μ=tanβ 其中β丝杠摩擦角(一般取0.17°~0.57°)。 2启动扭矩T计算: 启动扭矩T为惯性扭矩T a和工作扭矩T b之和。其中工作扭矩T b 通过上一部分求得,惯性扭矩T a由惯性力F a大小决定: F a=W?a 其中a为启动加速度(一般取0.1g~g,依设备要求而定,参考下式计算)。 a=v t 其中v为负载工作速度;t为启动加速时间。 T a计算方法与T b计算方法相同。 3 负载转动惯量J计算: 系统转动惯量J总等于电机转动惯量J M、齿轮转动惯量J G、丝杠转动惯量J S和负载转动惯量J之和。其中电机转动惯量J M、齿轮转动惯量J G和丝杠转动惯量J S数值较小,可根据具体情况忽略不计,如需计算请参考HIWIN丝杠选型样本。下面详述负载转动惯量J的计算过程。 将负载重量换算到电机输出轴上转动惯量,常见传动机构与公式如下:
含电动机电路的计算 一、知识点梳理 知识点一:电功的计算公式 W=UIt=Pt=I 2Rt=U 2t/R (对于纯电阻电路)。 知识点二:电功率的计算公式:P=W/t=UI=I 2R=U 2/R 。 知识点三:含电动机电路的计算公式:P P P =+输入热输出。 二、重难点突破 考点1. 电功 1.W=UIt=Pt ,即电流在某段电路上所做的功,等于这段电路两端电压、电路中的电流和通电时间的乘积。 2.W =I 2Rt=U 2t/R (对于纯电阻电路)。 例1.图是某款电热水龙头的电路原理图。R 1、R 2为电热丝,通过旋转手柄可使扇形开关S 同 时接触两个相邻触点,实现冷水、温水、热水挡之间的切换。当开关同时接触2、3触点 变式训练:下图是一种煲汤用的电热锅工作原理图,其中温控器的作用是每当水沸腾后能自动断电一段时间。电热锅的部分参数如下表所示。 (1)三脚插头上标着E 的导线和_______相连,插座上相应的导线和________相连。 (2)调节切换开关可以使电热锅处于“关、高温、自动、保温”四种工作状态,则原理图中的切换开关连接触点“_______ ”时为保温档。小明发现,当电热锅处于保温档正常工作时,不论加热多长时间,都不能使锅内的汤水沸腾,原因可能是________________________ 。 (3)该电热锅处于高温档正常工作时,使4.5L 的水温度升高54℃需要42min ,那么电热锅的效率为多少?[c 水=4.2×103J/(kg·℃)]
考点2. 电功率 1.P=W/t=UI,即电功率等于用电器两端的电压和通过它的电流的乘积,该公式是电功率的普适公式,适用于所有的用电器。 2.导出式:P=I2R,P=U2/R。这两个公式只适用于纯电阻电路,即能将电能全部转化为内能的用电器。 例2.在某一温度下,两个电路元件甲和乙中的电流与电压的关系如下图所示。由图可知,元 变式训练:甲、乙两只灯泡,其I﹣U关系图象如图所示.现将甲、乙两灯串联在电路中,当甲灯两端的电压为2V时,乙灯消耗的功率是() A.1.2W B.0.8W C.2W D.3W
GB15703-1995隔爆型电机基本技术要求 1 主题内容与适用范围 本标准规定了隔爆型电机型式和分类、技术要求、检验规则以及标志的要求。 本标准适用于各种用途的隔爆型电机。各种用途的隔爆型电机如有本标准未规定的附加要求时,应在该种电机的标准中作补充规定。 某些用途的隔爆型电机,如对本标准的条款有特殊要求时,应在该种电机的标准中作特殊规定。 本标准未作规定者应符合GB3836.2和GB755的规定。 2 引用标准 GB3836.1 爆炸性气体环境用防爆电气设备通用要求 GB3836.2 爆炸性气体环境用防爆电气设备隔爆型电气设备“d” GB3836.3 爆炸性气体环境用防爆电气设备增安型电气设备“e” GB755—87 旋转电机基本技术要求 GB4942.1—85 电机外壳防护分级 GB531—83 橡胶邵尔式A型硬度试验方法 GB1410—89 固体电工绝缘材料绝缘电阻体积电阻系数和表面电阻系数的试验方法GB2423.4—81 电工电子产品基本环境试验规程试验Db:交变湿热试验方法 GB 12351—90 热带型旋转电机环境技术要求 GB 11020—89 测定固体电气绝缘材料暴露在引燃源后燃烧性能的试验方法 GB 2900.25—82 电工名词术语电机 GB 2900.35—83 电工名词术语爆炸性环境用防爆电气设备 3 型式和分类 3.1 隔爆型电机类别、级别及温度组别 3.1.1 隔爆电机分为Ⅰ类和Ⅱ类 a.Ⅰ类:煤矿用电机; b.Ⅱ类:工厂用电机。 3.1.2 隔爆型电机的级别,对Ⅱ类隔爆型电机按其适用于爆炸气体混合物最大试验安全间隙分为A、B、C三级。 3.1.3 隔爆型电机的温度组别是根据电机允许最高表面温度而分组的。 a.Ⅰ类电机表面可能堆积粉尘时,允许最高表面温度为150℃;不会堆积或采取措施可防止堆积粉尘时,则允许最高表面温度为450℃。 b.Ⅱ类电机按其最高表面温度分为T1~T6六组,其各组允许最高表面温度见表1。 表1
范例(1)TOP
负荷系数表负荷条件TOP 如何选择电机的计算公式 范例(2)TOP
电动机扭距计算 电机的“扭矩”,单位是N?m(牛米) 计算公式是T=9549 * P / n 。 P是电机的额定(输出)功率单位是千瓦(KW) 分母是额定转速n 单位是转每分(r/min) P和n可从电机铭牌中直接查到。 如果没有时间限制1000W的电动机可以拖动任何重量的物体 1.1KW的电机输出扭矩为7.2N*m,要是不经过减速要提升1T的东西是不可能的。很简单的道理你可以用P=FV/1000计算出你可以达到的最大升降速度,这里要根据你的传动装置考虑效率进去。F 单位是N,V单位是m/s,P千瓦。注意单位换算。计算下来最大升降速度为0.11m/s。 电动机的名牌上有功率P,有转速n,有功率因数cosφ一般为0.85-0.9左右,设效率为η一般为0.9左右, 设电机扭矩T 则,T=9550*P/n T---扭矩Nm P--功率KW n---转速r/min Tsav=0.5T(Ts+Tcr), Tsav:平均启动扭矩。Ts最初启动扭矩。Tcr:牵入扭矩。 电机负荷的计算方法 一、计算折合到电机上的负载转矩的方法如下: 1、水平直线运动轴: 9.8*μ·W·PB TL= 2π·R·η(N·M) 式PB:滚珠丝杆螺距(m) μ:摩擦系数 η:传动系数的效率 1/R:减速比 W:工作台及工件重量(KG) 2、垂直直线运动轴: 9.8*(W-WC)PB
TL= 2π·R·η(N·M) 式WC:配重块重量(KG) 3、旋转轴运动: T1 TL= R·η(N·M) 式T1:负载转矩(N·M) 二:负载惯量计算 与负载转矩不同的是,只通过计算即可得到负载惯量的准确数值。不管是直线运动还是旋转运动,对所有由电机驱动的运动部件的惯量分别计算,并按照规则相加即可得到负载惯量。由以下基本公式就能得到几乎所有情况下的负载惯量。 1、柱体的惯量 D(cm) L(cm) 由下式计算有中心轴的圆柱体的惯量。如滚珠丝杆,齿轮等。 πγD4L (kg·cm·sec2)或πγ·L·D4(KG·M2) JK= 32*980 JK= 32 式γ:密度(KG/CM3) 铁:γ〧7.87*10-3KG/CM3=7.87*103KG/M3 铝:γ〧2.70*10-3KG/CM3=2.70*103KG/M3 JK:惯量(KG·CM·SEC2)(KG·M2) D:圆柱体直径(CM)·(M) L:圆柱体长度(CM )·(M) 2、运动体的惯量 用下式计算诸如工作台、工件等部件的惯量 W PB 2 JL1= 980 2π(KG·CM·SEC2) PB 2 =W 2π(KG·M2) 式中:W:直线运动体的重量(KG) PB:以直线方向电机每转移动量(cm)或(m) 3、有变速机构时折算到电机轴上的惯量 1、电机 Z2 J JO Z1 KG·CN:齿轮齿数 Z1 2 JL1= Z2 *J0 (KG·CM·SEC2)(KG·M2) 三、运转功率及加速功率计算 在电机选用中,除惯量、转矩之外,另一个注意事项即是电机功率计算。一般可按下式求得。 1、转功率计算 2π·Nm·TL P0= 60 (W) 式中:P0:运转功率(W) Nm:电机运行速度(rpm) TL:负载转矩(N·M) 2、速功率计算
初中电动机专题练习(含详细答案) 一.计算题(共26小题) 1.(2019?杭州一模)如图为某品牌运动果汁杯及其铭牌参数。运动果汁杯内置一个电动机,电动机通过金属杆带动刀片旋转,将水果打成果汁。此款运动果汁杯以额定功率工作时,一次打汁时间是48秒,充满电后可以打汁20次,20次后指示灯闪烁提示电量不足,需要充电。则: (1)电动机正常工作时,通过线圈的电流约为安。(保留1位小数,下同) (2)在打汁时,电动机线圈电阻为0.1欧,电动机输出的机械功率是多少? (3)此款运动果汁杯,当电池容量低于%时需要充电(电池容量“5100mAh”是指当工作电流为5100毫安,能持续供电1小时)。 2.(2019?杭州)如图是一电动机提升物体的示意图,电源电压为120伏。电动机将一个质量为50千克的物体1秒内匀速上提0.9米,电路中的电流为5安培,(g取10牛/千克) (1)求该电动机工作1秒钟所产生的电热。 (2)求电动机线圈阻值。 (3)当该重物上升到一定高度时,电动机的转子突然被卡住,为什么这种情况 下电动机容易烧坏? 3.(2018?富阳区模拟)如图是真空吸盘吊车吊运玻璃的示意图,起吊玻璃时先将吸盘压在玻璃上,然后启动抽气机将吸盘内的空气抽出,就可以利用大气压将玻璃吸起,然后启动电动机牵引滑轮组上的绳子就可以将吸盘和玻璃吊起,吊起后,水平横粱上的滑轨还可以将滑轮组水平移动将玻璃放到合适的位置。 已知吸盘重为60牛,每个滑轮重40牛,在某次吊装过程中,吊车用0.2米/秒的速度将一块重为400牛的玻璃吊高2米,然后又用时15秒水平移动了3米,不计抽气管和绳重,不计绳子、滑轮的摩擦,请根据信息回答下列问题: (1)吊车在整个起吊玻璃过程中对玻璃做了多少功? (2)电动机需要对绳子提供多少牛的拉力? (3)在吊车将玻璃吊高2米的过程中,电动机对绳子做功的功率为多大? (4)该滑轮组的机械效率为多大?
电机选型计算书 PZY 电机(按特大型车设计即重量为2500吨) 一、提升电机 根据设计统计提升框架重量为:2200kg,则总提升重量为G=2500+2200=4700kg 。设计提升速度为5-5.5米/分钟,减速机效率为0.95。 则提升电机所需要的最小理论功率: P=386.444495 .0605.58.94700=??? 瓦。 设计钢丝绳绕法示意图: 如图所示F=1/2*G ,V2=2*V1 即力减半,速度增加一 倍,所以F=2350 kg 。 根据设计要求选择电机功率应P >4444.386瓦,因为所有车库专用电机厂家现有功率P >4444.386瓦电机最小型号 5.5KW ,所以就暂定电机功率P=5.5KW ,i=60。 钢丝绳卷筒直径已确定为260mm ,若使设备提升速度到 5.5m/min 即0.09167m/s ;
由公式: D πων= 可求知卷筒转速: r D 474.1326 .014.311=?==πνω 查电机厂家资料知:电机功率:P=5.5KW 速比: i=60电机输出轴转速为ω=25r ,扭矩为M=199.21/kg ·m ,输出轴径d=φ60mm 。 则选择主动链轮为16A 双排 z=17,机械传动比为: 25474.13i 1' ==z z 54.31474 .131725z 1=?= 取从动轮16A 双排z=33; 1).速度校核: 所选电机出力轴转速为ω=25r ,机械减速比为33/17,得提升卷筒转速: r 88.1233 17251=?=ω 综上可知:提升钢索自由端线速度: min)/(52.1026.088.1214.3m D =??==πων 则提升设备速度为:v=10.52/2=5.26m/min 。 2).转矩校核: 设备作用到钢索卷筒上的力为:G/2=2350kg 。
怎样正确选择电动机? 电动机的功率.应根据生产机械所需要的功率来选择,尽量使电动机在额定负载下运行。选择时应注意以下两点: (1)如果电动机功率选得过小.就会出现“小马拉大车”现象,造成电动机长期过载.使其绝缘因发热而损坏.甚至电动机被烧毁。 (2)如果电动机功率选得过大.就会出现“大马拉小车”现象.其输出机械功率不能得到充分利用,功率因数和效率都不高(见表),不但对用户和电网不利。而且还会造成电能浪费。 要正确选择电动机的功率,必须经过以下计算或比较: (1)对于恒定负载连续工作方式,如果知道负载的功率(即生产机械轴上的功率)Pl(kw).可按下式计算所需电动机的功率P(kw): P=P1/n1n2 式中 n1为生产机械的效率;n2为电动机的效率。即传动效率。 按上式求出的功率,不一定与产品功率相同。因此.所选电动机的额定功率应等于或稍大于计算所得的功率。 例:某生产机械的功率为3.95kw.机械效率为70%、如果选用效率为0.8的电动机,试求该电动机的功率应为多少kw? 解:P=P1/ n1n2=3.95/0.7*0.8=7.1kw 由于没有7.1kw这—规格.所以选用7.5kw的电动机。 (2)短时工作定额的电动机.与功率相同的连续工作定额的电动机相比.最大转矩大,重量小,价格低。因此,在条件许可时,应尽量选用短时工作定额的电动机。 (3)对于断续工作定额的电动机,其功率的选择、要根据负载持续率的大小,选用专门用于断续运行方式的电动机。负载持续串Fs%的计算公式为 FS%=tg/(tg+to)×100% 式中 tg为工作时间,t。为停止时间min;tg十to为工作周期时间min。 此外.也可用类比法来选择电动机的功率。所谓类比法。就是与类似生产机械所用电动机的功率进行对比。具体做法是:了解本单位或附近其他单位的类似生产机械使用多大功率的电动机,然后选用相近功率的电动机进行试车。试车的目的是验证所选电动机与生产机械是否匹配。验证的方法是:使电动机带动生产机械运转,用钳形电流表测量电动机的工作电流,将测得的电流与该电动机铭牌上标出的额定电流进行
各种电机额定电流的计算 1、电机电流计算: 对于交流电三相四线供电而言,线电压是380,相电压是220,线电压是根号3相电压 对于电动机而言一个绕组的电压就是相电压,导线的电压是线电压(指A相 B相 C相之间的电压,一个绕组的电流就是相电流,导线的电流是线电流 当电机星接时:线电流=相电流;线电压=根号3相电压。三个绕组的尾线相连接,电势为零,所以绕组的电压是220伏当电机角接时:线电流=根号3相电流;线电压=相电压。绕组是直接接380的,导线的电流是两个绕组电流的矢量之和 功率计算公式 p=根号3 UI乘功率因数是对的 用一个钳式电流表卡在A B C任意一个线上测到都是线电流 三相的计算公式: P=1.732×U×I×cosφ (功率因数:阻性负载=1,感性负载≈0.7~0.85之间,P=功率:W) 单相的计算公式: P=U×I×cosφ 空开选择应根据负载电流,空开容量比负载电流大20~30%附近。P=1.732×IU×功率因数×效率(三相的) 单相的不乘1.732(根号3) 空开的选择一般选总体额定电流的1.2-1.5倍即可。
经验公式为: 380V电压,每千瓦2A, 660V电压,每千瓦1.2A, 3000V电压,4千瓦1A, 6000V电压,8千瓦1A。 3KW以上,电流=2*功率;3KW及以下电流=2.5*功率 2功率因数(用有功电量除以无功电量,求反正切值后再求正弦值)功率因数cosΦ=cosarctg(无功电量/有功电量) 视在功率S 有功功率P 无功功率Q 功率因数cosΦ 视在功率S=(有功功率P的平方+无功功率Q 的平方)再开平方 而功率因数cosΦ=有功功率P/视在功率S 3、求有功功率、无功功率、功率因数的计算公式,请详细说明下。(变压器为单相变压器) 另外无功功率的降低会使有功功率也降低么?反之无功功率的升高也会使有功功率升高么? 答:有功功率=I*U*cosφ即额定电压乘额定电流再乘功率因数 单位为瓦或千瓦 无功功率=I*U*sinφ,单位为乏或千乏. I*U 为容量,单位为伏安或千伏安. 无功功率降低或升高时,有功功率不变.但无功功率降低时,电流要降低,线路损耗降低,反之,线路损耗要升高. 4、什么叫无功功率?为什么叫无功?无功是什么意思?