西安交通大学实验报告
成绩
共 7 页课程医学成像实验
系别生物医学工程实验日期 2012 年 12 月 XX日专业班级医电 01 班组别交报告日期 2013 年 01 月 02日姓名学号报告退发 (订正、重做)
同组者教师审批签字
实验名称 CT重建原理——投影数据采集实验1
一、实验目的以及要求
实验目的:利用CTSim模拟软件生成投影数据,为滤波反投影重建实验做准备。
实验基本要求:用CTSim程序完成实验模拟,分析评价结果。
二、实验内容
1、利用CTSim模拟软件生成椭圆的平行束投影数据;
2、利用CTSim模拟软件生成Shepp-Logan图的平行束投影数据;
3、对生成的投影数据进行初步评价。
三、实验步骤
A、完成CTSim模拟软件生成椭圆的平行束投影数据;
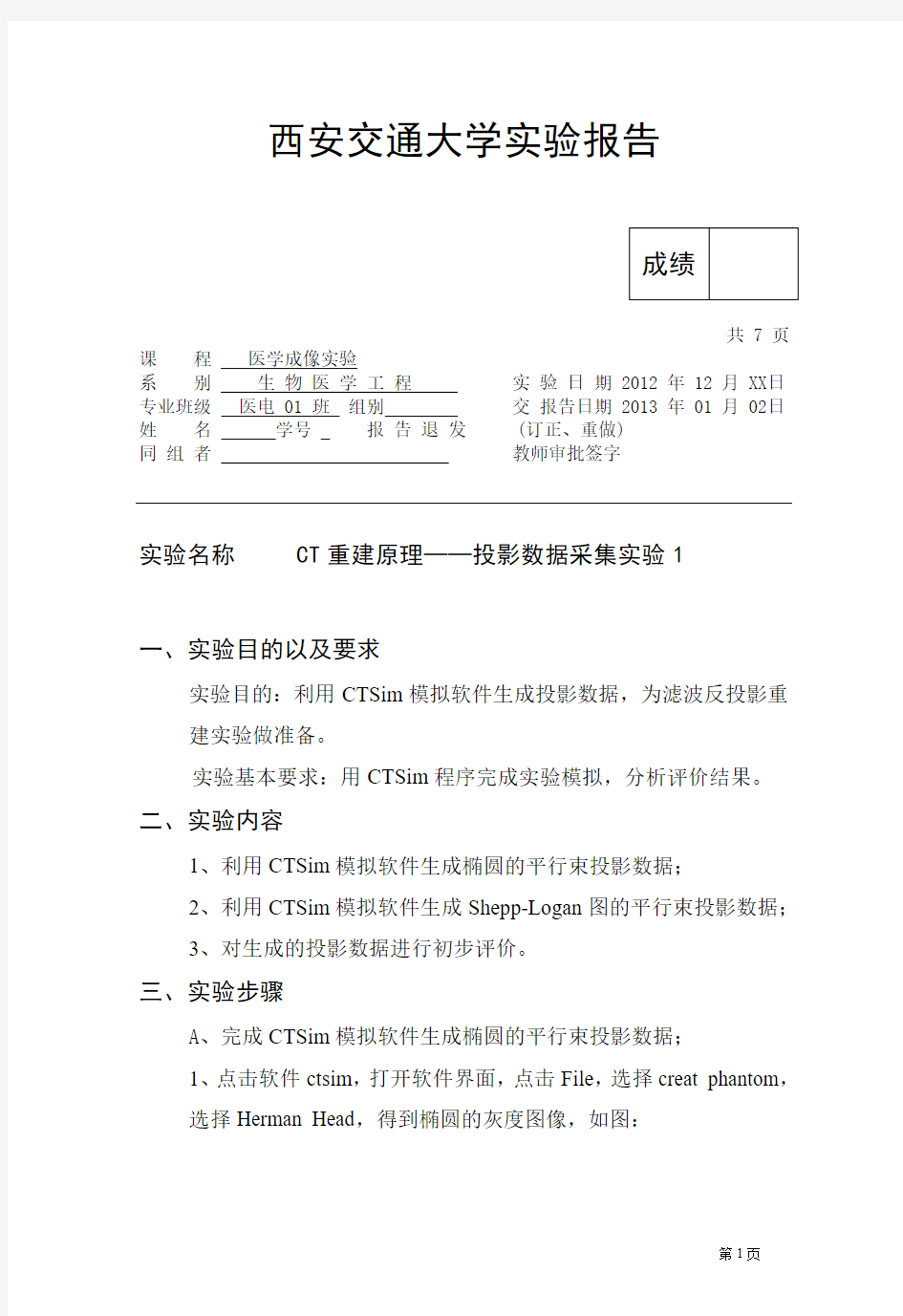
1、点击软件ctsim,打开软件界面,点击File,选择creat phantom,
选择Herman Head,得到椭圆的灰度图像,如图:
图1 软件界面图2 选择界面
图3 椭圆的原始数据
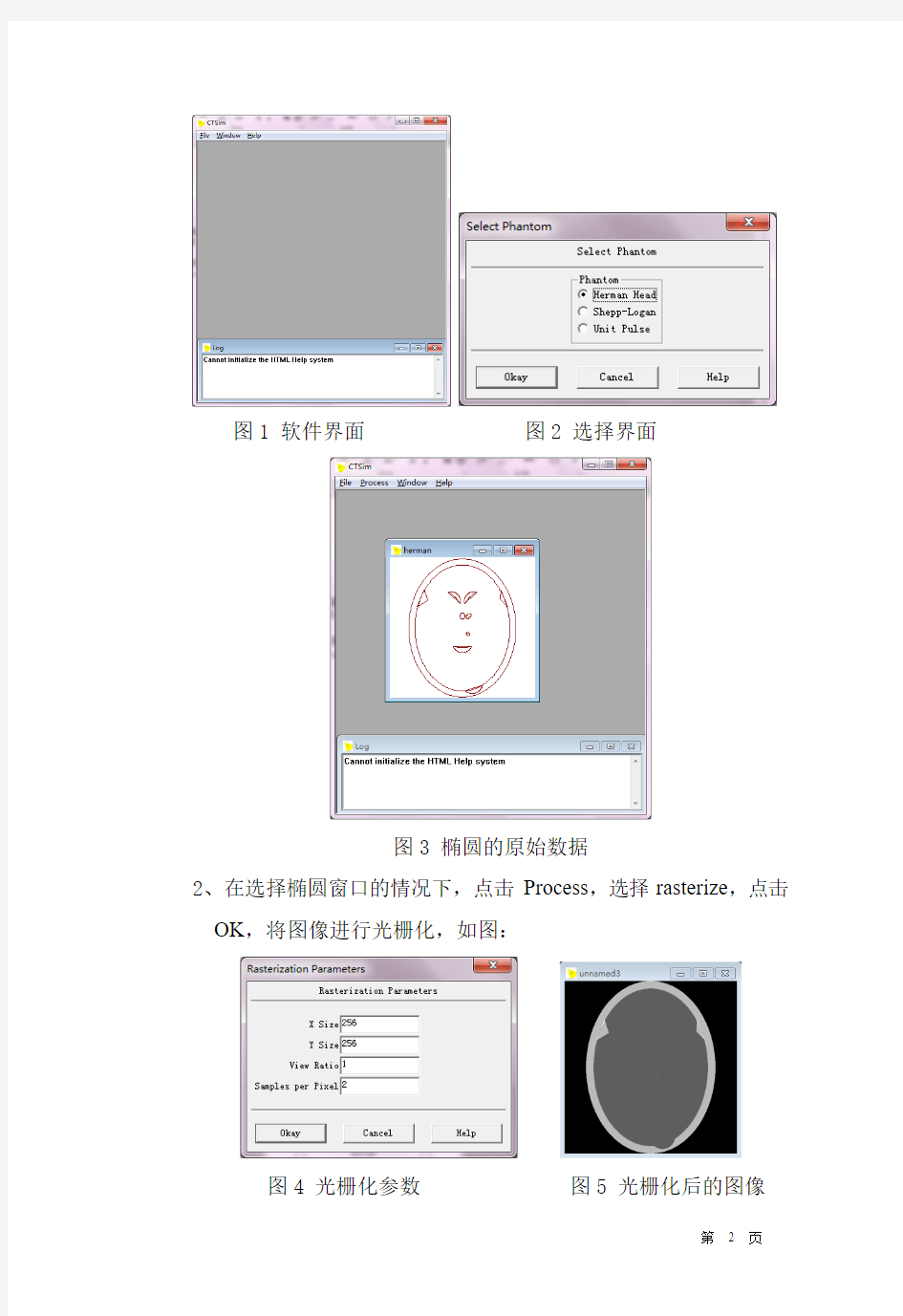
2、在选择椭圆窗口的情况下,点击Process,选择rasterize,点击
OK,将图像进行光栅化,如图:
图4 光栅化参数图5 光栅化后的图像
3、在选择unnamed3窗口,选择View,选择Auto Scale Parameters,
将Standard Deviation Factor参数改为0.02,点击OK,得到处理后图像,如图:
图6 光栅化参数图7 参数优化后图像
4、回到herman窗口,点击Process,选择Projection Paramaters,参数默认即可,点击ok,开始采集数据,如图:
图8 参数选择界面
5、得到投影参数后,在选择unnamed4窗口界面下,选择Analyze,
在选择Plot Histogram,得到平行束投影分析数据,如图:
图9 平行束投影后的数据图10 投影数据分析图
6、在选择平行束投影后数据窗口情况下,选择Reconstruct,选择Filtered Backprojection Parameters,选择默认参数即可,点击OK,得到重建数据,如图:
图11 参数选择界面图12 重建后的图像
7、可选择不同的View参数对重建后的图像进行参数的优化调整,得到最优的观察效果。
B、完成CTSim模拟软件生成Shepp-Logan图的平行束投影数据;
1、由于生成Shepp-Logan图的平行束投影数据和前面A中的步骤基本类似,只是选择的模拟图像不同而已,故在此不再一一列出步骤。
四、实验结果及分析
A、椭圆平行束投影
图13 椭圆平行束投影及其重建图像
图13 采用Projection方式图14 时域的采样参数时的数据采集过程
图15 椭圆投影数据的分析直方图
B、Shepp-Logan图的平行束投影
图16 Shepp-Logan图平行束投影及其重建图像
图17 数据采集过程图18 时域的采样参数
图19 Shepp-Logan图投影数据的分析直方图结果分析:
由图15和图19的投影数据的分析可知,它们的统计直方分布图还是有明显区别的,这是因为Shepp-Logan的图像更复杂,厚度更大,因此,X射线通过后的衰减程度也是不一样的。在椭圆的统计直方图数据中,只有在0.3处,有一个峰值,而在Shepp-Logan中,在
0.05到0.15之间有两个峰值。
同时,从重建中的图像中可以看出,与原来的图像相比较,还是存在一定的噪声干扰的,在后期的数据处理中应该加入一定滤波技术,使图像更加清楚地展示。
西安交通大学实验报告
成绩
共 17 页课程医学成像实验
系别生物医学工程实验日期 2012 年 12 月 XX日专业班级医电 01 班组别交报告日期 2013 年 01 月 02日姓名谭礼茂学号 10121019 报告退发 (订正、重做)
同组者教师审批签字
实验名称 CT重建原理——投影数据采集实验2
一、实验目的
对仿真数据与实际图像数据实现滤波反投影重建,加深对CT成像过程及原理的理解。
二、实验要求
用CTSim程序完成滤波反投影重建实验,分析评价结果。
三、实验内容
1、对人脑体模仿真数据与实际的CT图像数据进行滤波反投影重
建实验,比较直接反投影与R——L和S——L滤波方法的重建结果;
2、分析不同视角条件下各种重建的结果;
3、分析噪声对各种滤波反投影重建方法的影响,比较各种滤波反
投影重建方法的抗噪能力;
4、计算重建误差。
四、实验步骤
在第一次实验时,已经获得了图像的投影方式,并在实验报告中详细列出了操作的步骤,故在此不再重复。
1、在仿真软件中,有很多可以选择的选项,比如在扫描数据时,
选择Process,选择Projection Parameters,在这个对话框里面,Geometry选项是用来选择投影的方式的,一共有三种选择的方式,如图:
图1 投影方式的选择
2、同样在图像重建时,可以选择不同的滤波方式,重建的图像进行滤波,选择Reconstruct,选择Filted Backprojection,在对话框中有Filter选项,其中包含四种滤波方式可供选择,如图所示:
图2 滤波方式的选择
3、重建误差的计量可以使用软件自带的相减,在Image选项下面,点击subtract,可以获得重建后的图像与原始图像之间的差值,如图:
图3 图像之间的相减
五、实验结果
A、椭圆数据
1、首先,利用模拟软件进行椭圆的不同投影方式下的数据采集:
图4 采用软件自带的三种投影方式:平行束投影、等角投影和等线投影,得到的K空间的图像
2、三种不同的投影方式在同一种滤波方式:Bandlimit滤波,下
得到的重建图像以及重建误差,如图:
图5 投影数据(第一行)、重建图像(第二行)、重建误差(第三行)3、三种不同的投影方式在同一种滤波方式:hamming滤波,下得
到的重建图像以及重建误差,如图:
行)
4、三种不同的投影方式在同一种滤波方式:hanning滤波,下得到的重建图像以及重建误差,如图:
图7 重建图像(第一行)、重建误差(第二行)
5、三种不同的投影方式在同一种滤波方式:Cosine滤波,下得到的重建图像以及重建误差,如图:
图8 重建图像(第一行)、重建误差(第二行)
B、Shepp-Logan图
1、首先,利用模拟软件进行的不同投影方式下的数据采集:
图9图4 采用软件自带的三种投影方式:平行束投影、等角投影和等线投影,得到的K空间的图像
2、三种不同的投影方式在同一种滤波方式:Bandlimit滤波,下得到的重建图像以及重建误差,如图:
图10 重建图像(第一行)、重建误差(第二行)
到的重建图像以及重建误差,如图:
图11 重建图像(第一行)、重建误差(第二行)
4、三种不同的投影方式在同一种滤波方式:hanning滤波,下得到的重建图像以及重建误差,如图:
图12 重建图像(第一行)、重建误差(第二行)
的重建图像以及重建误差,如图:
图13 重建图像(第一行)、重建误差(第二行)
C 、在MATLAB 平台下,调用phantom 函数,获得标准图像,然后进行投影,并在无滤波、Ram-Lak 滤波重建、Shepp-Logan 滤波重建,(代码见附录程序1
)得到的结果如下图所示:
原始图
像
Ram-Lak 滤波重建
50
100
150
200
250
50100150200250
无滤波重建
50
100
150
200
250
50100
150200250
Shepp-Logan 滤波重建
50
100
150
200
250
50100150200250
图14 原始图像以及三种滤波情况下的重建图像
D 、利用MATLAB 平台,选用实际中CT 脑部图像,然后进行投影,并在无滤波、Ram-Lak 滤波重建、Shepp-Logan 滤波重建,(代码见附录程序2
)得到的结果如下图所示:
原始图像
Ram-Lak 滤波重建
100
200
300
400
500
100200300400
500
无滤波重建
100
200
300
400
500
100200300400
500
Shepp-Logan 滤波重建
100
200
300
400
500
100200300400
500
图15 原始图像以及三种滤波情况下的重建图像
E 、分析不同的视角条件下,投影并进行重建的图像情况,本次采用两种情况下的视角
a 、从0度到180度,间隔为10度,共18个视角;
b 、从0度到180度,间隔为2度,共90个视角。
同样分别采用三种滤波方式进行重建(代码见附录程序3)。 结果如下图所示:
原始图
像
无滤波重建
50
100150200250
50100150200
250
Ram-Lak 滤波重建
50
100
150
200
250
50100150200
250
Shepp-Logan 滤波重建
50
100150200250
50100150200
250
图16 a
情况下的重建图像
原始图
像
无滤波重建
50
100
150
200
250
50100150200
250
Ram-Lak 滤波重建
50
100
150
200
250
50100150200
250
Shepp-Logan 滤波重建
50
100
150
200
250
50100150200
250
图17 b 情况下的重建图像
F 、噪声测试,在实际测试中添加高斯白噪声(均值为0,方差为0.1),然后进行投影之后,滤波重建,这三种情况下的滤波效果均不理想(代码见附录程序4),然后,再选择添加Poisson 噪声,然后投影并在三种滤波情况下进行重建图像,并采用模拟图像和实际的CT 图像分别进行测试(代码见附录程序5)
,结果如下图所示:
original
无滤波重建
50
100
150
200
250
50100150200250
Ram-Lak 滤波重建
50
100
150
200
250
50100150200250
Shepp-Logan 滤波重建
50
100
150
200
250
50100
150200
250
图18 模拟图像的高斯白噪声测试
original
无滤波重建
100
200
300
400
500
100
200300400500
Ram-Lak 滤波重建
100
200
300
400
500
100200300400500
Shepp-Logan 滤波重建
100
200
300
400
500
100200300400500
图19 实际CT 图像的高斯白噪声测试
original
无滤波重建
50
100150200250
50100150200250
Ram-Lak 滤波重建
50
100
150
200
250
50100150200250
Shepp-Logan 滤波重建
50
100150200250
50100150
200
250
图20 模拟图像的Poisson 噪声测试
original
无滤波重建
100
200
300
400
500
100200300400500
Ram-Lak 滤波重建
100
200
300
400
500
100
200300400500
Shepp-Logan 滤波重建
100
200
300
400
500
100200300400500
图21 实际CT 图像的Poisson 噪声测试
六、结果分析
1、在没有噪声干扰或者噪声干扰很小的情况下,三种情况:无滤波、Ram-Lak 滤波重建、Shepp-Logan 滤波下的重建,无滤波重建得到的图像显示细节并没有另外两种优,后两种滤波重建得到的图像并没有很大的差异,如图14和图15所示。
2、不同的视角条件下,投影后重建的图像是有明显差异的,视角的间隔越小,最后重建得到的图像越优,如图16和图17所示。
3、在有噪声的干扰的情况下,首先测试高斯白噪声,结果表明,三种滤波方式均未能从噪声中很好地提取图像信息,如图18和图19所示,而在测试Poisson噪声情况下,无滤波重建显然不及后两种滤波投影优,而R-L和S-L均能达到理想的重建效果,但是相对来说,S-L的重建效果更有些,如图20和图21所示。
《计算方法》实验报告 姓名: 班级: 学号: 实验日期: 2011年10月26日
一、实验题目: 数值积分 二、实验目的: 1.熟悉matlab 编写及运行数值计算程序的方法。 2.进一步理解数值积分的基础理论。 3.进一步掌握应用不同的数值积分方法求解给定的积分并给出数据结果及误差分析。 三、实验内容: 1.分别用复合梯形求积公式及复合辛普森求积公式计算积分xdx x ln 10 ? , 要求计算精度达到410-,给出计算结果并比较两种方法的计算节点数. 2.用龙贝格求积方法计算积分dx x x ?+3 021,使误差不超过510-. 3.用3=n 的高斯-勒让德公式计算积分?3 1 sin x e x ,给出计算结果. 4.用辛普森公式(取2==M N ) 计算二重积分.5 .00 5 .00 dydx e x y ? ? - 四、实验结果: 1.(1)复合梯形法: 将区间[a,b]划分为n 等份,分点n k n a b h kh a x k ,2,1,0,,=-=+=在每个区间[1,+k k x x ](k=0,1,2,···n-1)上采用梯形公式,则得 )()]()([2)()(1 11 1 f R x f x f h dx x f dx x f I n n k k k b a n k x x k k ++===∑?∑? -=+-=+ 故)]()(2)([21 1 b f x f a f h T n k k n ++=∑-=称为复合梯形公式 计算步长和划分的区间 Eps=1E-4 h1=sqrt(Eps/abs(-(1-0)/12*1/(2+1))) h1 =0.0600 N1=ceil(1/h1) N1 =17 用复合梯形需要计算17个结点。 复合梯形: function T=trap(f,a,b,n) h=(b-a)/n;
电力电子电路分析与仿真 实验报告 学院:哈尔滨理工大学荣成学院 专业: 班级: 姓名: 学号: 年月日
实验1降压变换器 一、实验目的: 设计一个降压变换器,输入电压为220V,输出电压为50V,纹波电压为输出电压的0.2%,负载电阻为20欧,工作频率分别为220kHz。 二、实验内容: 1、设计参数。 2、建立仿真模型。 3、仿真结果与分析。 三、实验用设备仪器及材料: MATLAB仿真软件 四、实验原理图: 五、实验方法及步骤: 1.建立一个仿真模型的新文件。在MATLAB的菜单栏上点击File,选择New,再在弹出菜单中选择Model,这时出现一个空白的仿真平台,在这个平台上可以绘制电路的仿真模型。 2.提取电路元器件模块。在仿真模型窗口的菜单上点击Simulink调出模型库浏览器,在模型库中提取所需的模块放到仿真窗口。
3.仿真模型如图所示。 六、参数设置 七、仿真结果分析
实验2升压变换器 一、实验目的: 将一个输入电压在3~6V的不稳定电源升压到稳定的15V,纹波电压低于0.2%,负载电阻10欧,开关管选择MOSFET,开关频率为40kHz,要求电感电流连续。 二、实验内容: 1、设计参数。 2、建立仿真模型。 3、仿真结果与分析。 三、实验用设备仪器及材料: MATLAB仿真软件 五、实验原理图: 五、实验方法及步骤: 1.建立一个仿真模型的新文件。在MATLAB的菜单栏上点击File,选择New,再在弹出菜单中选择Model,这时出现一个空白的仿真平台,在这个平台上可以绘制电路的仿真模型。 2.提取电路元器件模块。在仿真模型窗口的菜单上点击Simulink调出模型库浏览器,在模型库中提取所需的模块放到仿真窗口。
信号与系统仿真实验报告1.实验目的 了解MATLAB的基本使用方法和编程技术,以及Simulink平台的建模与动态仿真方法,进一步加深对课程内容的理解。 2.实验项目 信号的分解与合成,观察Gibbs现象。 信号与系统的时域分析,即卷积分、卷积和的运算与仿真。 信号的频谱分析,观察信号的频谱波形。 系统函数的形式转换。 用Simulink平台对系统进行建模和动态仿真。 3.实验内容及结果 3.1以周期为T,脉冲宽度为2T1的周期性矩形脉冲为例研究Gibbs现象。 已知周期方波信号的相关参数为:x(t)=∑ak*exp(jkω),ω=2*π/T,a0=2*T1/T,ak=sin(kωT1)/kπ。画出x(t)的波形图(分别取m=1,3,7,19,79,T=4T1),观察Gibbs现象。 m=1; T1=4; T=4*T1;k=-m:m; w0=2*pi/T; a0=2*T1/T; ak=sin(k*w0*T1)./(k*pi); ak(m+1)=a0; t=0:0.1:40; x=ak*exp(j*k'*w0*t); plot(t,real(x)); 3.2求卷积并画图 (1)已知:x1(t)=u(t-1)-u(t-2), x2(t)=u(t-2)-u(t-3)求:y(t)=x1(t)*x2(t)并画出其波形。 t1=1:0.01:2; f1=ones(size(t1)); f1(1)=0; f1(101)=0; t2=2:0.01:3; f2=ones(size(t2)); f2(1)=0; f2(101)=0; c=conv(f1,f2)/100;
t3=3:0.01:5; subplot(311); plot(t1,f1);axis([0 6 0 2]); subplot(312); plot(t2,f2);axis([0 6 0 2]); subplot(313); plot(t3,c);axis([0 6 0 2]); (2)已知某离散系统的输入和冲击响应分别为:x[n]=[1,4,3,5,1,2,3,5], h[n]=[4,2,4,0,4,2].求系 统的零状态响应,并绘制系统的响应图。 x=[1 4 3 5 1 2 3 5]; nx=-4:3; h=[4 2 4 0 4 2]; nh=-3:2; y=conv(x,h); ny1=nx(1)+nh(1); ny2=nx(length(nx))+nh(length(nh)); ny=[ny1:ny2]; subplot(311); stem(nx,x); axis([-5 4 0 6]); ylabel('输入') subplot(312); stem(nh,h); axis([-4 3 0 5]); ylabel('冲击效应') subplot(313); stem(ny,y); axis([-9 7 0 70]); ylabel('输出'); xlabel('n'); 3.3 求频谱并画图 (1) 门函数脉冲信号x1(t)=u(t+0.5)-u(t-0.5) N=128;T=1; t=linspace(-T,T,N); x=(t>=-0.5)-(t>=0.5); dt=t(2)-t(1); f=1/dt; X=fft(x); F=X(1:N/2+1); f=f*(0:N/2)/N; plot(f,F)
实验报告 (理工类) 课程名称: 机器人创新实验 课程代码: 6003199 学院(直属系): 机械学院机械设计制造系 年级/专业/班: 2010级机制3班 学生姓名: 学号: 实验总成绩: 任课教师: 李炜 开课学院: 机械工程与自动化学院 实验中心名称: 机械工程基础实验中心
一、设计题目 工业机器人设计及仿真分析 二、成员分工:(5分) 三、设计方案:(整个系统工作原理和设计)(20分) 1、功能分析 工业机器人由操作机(机械本体)、控制器、伺服驱动系统和检测传感装置构成,是一种仿人操作、自动控制、可重复编程、能在三维空间完成各种作业的机电一体化自动化生产设备。特别适合于多品种、变批量的柔性生产。它对稳定、提高产品质量,提高生产效率,改善劳动条件和产品的快速更新换代起着十分重要的作用。机器人技术是综合了计算机、控制论、机构学、信息和传感技术、人工智能、仿生学等多学科而形成的高新技术,是当代研究十分活跃,应用日益广泛的领域。机器人应用情况,是一个国家工业自动化水平的重要标志。机器人并不是在简单意义上代替人工的劳动,而是综合了人的特长和机器特长的一种拟人的电子机械装置,既有人对环境状态的快速反应和分析判断能力,又有机器可长时间持续工作、精确度高、抗恶劣环境的能力,从某种意义上说它也是机器的进化过程产物,它是工业以及非产业界的重要生产和服务性设备,也是先进制造技术领域不可缺少的自动化设备。 本次我们小组所设计的工业机器人主要用来完成以下任务: (1)、完成工业生产上主要焊接任务; (2)、能够在上产中完成油漆、染料等喷涂工作; (3)、完成加工工件的夹持、送料与转位任务; (5)、对复杂的曲线曲面类零件加工;(机械手式数控加工机床,如英国DELCAM公司所提供的风力发电机叶片加工方案,起辅助软体为powermill,本身为DELCAM公司出品)
本科实验报告 课程名称:计算机数值方法 实验项目:方程求根、线性方程组的直接解 法、线性方程组的迭代解法、代数插值和最 小二乘拟合多项式 实验地点:行勉楼 专业班级: ******** 学号: ********* 学生姓名: ******** 指导教师:李誌,崔冬华 2016年 4 月 8 日
y = x*x*x + 4 * x*x - 10; return y; } float Calculate(float a,float b) { c = (a + b) / 2; n++; if (GetY(c) == 0 || ((b - a) / 2) < 0.000005) { cout << c <<"为方程的解"<< endl; return 0; } if (GetY(a)*GetY(c) < 0) { return Calculate(a,c); } if (GetY(c)*GetY(b)< 0) { return Calculate(c,b); } } }; int main() { cout << "方程组为:f(x)=x^3+4x^2-10=0" << endl; float a, b; Text text; text.Getab(); a = text.a; b = text.b; text.Calculate(a, b); return 0; } 2.割线法: // 方程求根(割线法).cpp : 定义控制台应用程序的入口点。// #include "stdafx.h" #include"iostream"
心得体会 使用不同的方法,可以不同程度的求得方程的解,通过二分法计算的程序实现更加了解二分法的特点,二分法过程简单,程序容易实现,但该方法收敛比较慢一般用于求根的初始近似值,不同的方法速度不同。面对一个复杂的问题,要学会简化处理步骤,分步骤一点一点的循序处理,只有这样,才能高效的解决一个复杂问题。
Matlab通信原理仿真 学号: 2142402 姓名:圣斌
实验一Matlab 基本语法与信号系统分析 一、实验目的: 1、掌握MATLAB的基本绘图方法; 2、实现绘制复指数信号的时域波形。 二、实验设备与软件环境: 1、实验设备:计算机 2、软件环境:MATLAB R2009a 三、实验内容: 1、MATLAB为用户提供了结果可视化功能,只要在命令行窗口输入相应的命令,结果就会用图形直接表示出来。 MATLAB程序如下: x = -pi::pi; y1 = sin(x); y2 = cos(x); %准备绘图数据 figure(1); %打开图形窗口 subplot(2,1,1); %确定第一幅图绘图窗口 plot(x,y1); %以x,y1绘图 title('plot(x,y1)'); %为第一幅图取名为’plot(x,y1)’ grid on; %为第一幅图绘制网格线 subplot(2,1,2) %确定第二幅图绘图窗口 plot(x,y2); %以x,y2绘图 xlabel('time'),ylabel('y') %第二幅图横坐标为’time’,纵坐标为’y’运行结果如下图: 2、上例中的图形使用的是默认的颜色和线型,MATLAB中提供了多种颜色和线型,并且可以绘制出脉冲图、误差条形图等多种形式图: MATLAB程序如下: x=-pi:.1:pi; y1=sin (x); y2=cos (x); figure (1); %subplot (2,1,1); plot (x,y1); title ('plot (x,y1)'); grid on %subplot (2,1,2); plot (x,y2);
大学物理仿真实验报告 姓名: 学号: 班级:
实验-----利用单摆测量重力加速度 实验目的 利用单摆来测量重力加速度 实验原理 单摆的结构参考图1单摆仪,一级近似的周期公式为 由此通过测量周期摆长求重力加速度 实验仪器 单摆仪、摆幅测量标尺、钢球、游标卡尺 实验内容 一.用误差均分原理设计一单摆装置,测量重力加速度g. 设计要求: (1)根据误差均分原理,自行设计试验方案,合理选择测量仪器和方法. (2)写出详细的推导过程,试验步骤.
(3)用自制的单摆装置测量重力加速度g,测量精度要求△g/g < 1%. 可提供的器材及参数: 游标卡尺、米尺、千分尺、电子秒表、支架、细线(尼龙线)、钢球、摆幅测量标尺(提供硬白纸板自制)、天平(公用). 假设摆长l≈70.00cm;摆球直径D≈2.00cm;摆动周期T≈1.700s; 米尺精度△米≈0.05cm;卡尺精度△卡≈0.002cm;千分尺精度△千≈0.001cm;秒表精度△秒≈0.01s;根据统计分析,实验人员开或停秒表反应时间为0.1s左右,所以实验人员开,停秒表总的反应时间近似为△人≈0.2s. 二.对重力加速度g的测量结果进行误差分析和数据处理,检验实验结果是否达到设计 要求. 三.自拟实验步骤研究单摆周期与摆长,摆角,悬线的质量和弹性系数,空气阻力等因素 的关系,试分析各项误差的大小. 四.自拟试验步骤用单摆实验验证机械能守恒定律. 实验数据 摆线长+小球直径L=91.50cm
D(平均)=(1.750+1.752+1.744+1.740+1.749+1.748)÷6=1.7 47m R=D/2=0.850cm l=L-R=91.05cm t=95.91s,周期数n=50,周期T=1.92s 所以g=9.751 2ΔT/t=0.0022,ΔL/l=0.0005,所以Δg/g=0.27%,Δg=0.026 所以: g=(9.751±0.026) 实验结论与误差分析: 结论:g=(9.751±0.026),Δg/g=0.27%<1%,所以达到设计要求。 误差分析: 1.若θ>5°(即角度过大)因为T 与θ相关,当θ越大时T也越大,所以θ偏大,测量 值比值偏小。
简单计算器 姓名: 周吉祥 实验目的:模仿日常生活中所用的计算器,自行设计一个简单的计算器程序,实现简单的计算功能。 实验内容: (1)体系设计: 程序是一个简单的计算器,能正确输入数据,能实现加、减、乘、除等算术运算,运算结果能正确显示,可以清楚数据等。 (2)设计思路: 1)先在Visual C++ 6.0中建立一个MFC工程文件,名为 calculator. 2)在对话框中添加适当的编辑框、按钮、静态文件、复选框和单 选框 3)设计按钮,并修改其相应的ID与Caption. 4)选择和设置各控件的单击鼠标事件。 5)为编辑框添加double类型的关联变量m_edit1. 6)在calculatorDlg.h中添加math.h头文件,然后添加public成 员。 7)打开calculatorDlg.cpp文件,在构造函数中,进行成员初始 化和完善各控件的响应函数代码。 (3)程序清单:
●添加的public成员: double tempvalue; //存储中间变量 double result; //存储显示结果的值 int sort; //判断后面是何种运算:1.加法2.减法3. 乘法 4.除法 int append; //判断后面是否添加数字 ●成员初始化: CCalculatorDlg::CCalculatorDlg(CWnd* pParent /*=NULL*/) : CDialog(CCalculatorDlg::IDD, pParent) { //{{AFX_DATA_INIT(CCalculatorDlg) m_edit1 = 0.0; //}}AFX_DATA_INIT // Note that LoadIcon does not require a subsequent DestroyIcon in Win32 m_hIcon = AfxGetApp()->LoadIcon(IDR_MAINFRAME); tempvalue=0; result=0; sort=0; append=0; }
中南大学系统仿真实验报告 指导老师胡杨 实验者 学号 专业班级 实验日期 2014.6.4 学院信息科学与工程学院
目录 实验一MATLAB中矩阵与多项式的基本运算 (3) 实验二MATLAB绘图命令 (7) 实验三MATLAB程序设计 (9) 实验四MATLAB的符号计算与SIMULINK的使用 (13) 实验五MATLAB在控制系统分析中的应用 (17) 实验六连续系统数字仿真的基本算法 (30)
实验一MATLAB中矩阵与多项式的基本运算 一、实验任务 1.了解MATLAB命令窗口和程序文件的调用。 2.熟悉如下MATLAB的基本运算: ①矩阵的产生、数据的输入、相关元素的显示; ②矩阵的加法、乘法、左除、右除; ③特殊矩阵:单位矩阵、“1”矩阵、“0”矩阵、对角阵、随机矩阵的产生和运算; ④多项式的运算:多项式求根、多项式之间的乘除。 二、基本命令训练 1.eye(m) m=3; eye(m) ans = 1 0 0 0 1 0 0 0 1 2.ones(n)、ones(m,n) n=1;m=2; ones(n) ones(m,n) ans = 1 ans = 1 1
3.zeros(m,n) m=1,n=2; zeros(m,n) m = 1 ans = 0 0 4.rand(m,n) m=1;n=2; rand(m,n) ans = 0.8147 0.9058 5.diag(v) v=[1 2 3]; diag(v) ans = 1 0 0 0 2 0 0 0 3 6.A\B 、A/B、inv(A)*B 、B*inv(A) A=[1 2;3 4];B=[5 6;7 8]; a=A\B b=A/B c=inv(A)*B d=B*inv(A) a = -3 -4 4 5 b = 3.0000 -2.0000 2.0000 -1.0000
大物仿真实验报告 大学物理仿真实验报告 实验名称:测量刚体的转动惯量 实验目的: 1.用实验方法验证刚体转动定律,并求其转动惯量; 2.观察刚体的转动惯量与质量分布的关系 3.学习作图的曲线改直法,并由作图法处理实验数据。 实验原理: 1.刚体的转动定律 具有确定转轴的刚体,在外力矩的作用下,将获得角加速度β,其值与外力矩成正比,与刚体的转动惯量成反比,即有刚体的转动定律: M = Iβ (1) 利用转动定律,通过实验的方法,可求得难以用计算方法得到的转动惯量。 2.应用转动定律求转动惯量 待测刚体由塔轮,伸杆及杆上的配重物组成。刚体将在砝码的拖动下绕竖直轴转动。设细线不可伸长,砝码受到重力和细线的张力作用,从静止开始以加速度a下落,其运动方程为mg –t=ma,在t时间内下落的高度为h=at2/2。刚体受到张力的力矩为Tr和轴摩擦力力矩Mf。由转动定律可得到刚体的转动运动方程:Tr - Mf = Iβ。绳与塔轮间无相对滑动时有a = rβ,上述四个方程得到: m(g - a)r - Mf = 2hI/rt2 (2) Mf与张力矩相比可以忽略,砝码质量m比刚体的质量小的多时有a< 计算方法实验报告格式 小组名称: 组长姓名(班号): 小组成员姓名(班号): 按贡献排序情况: 指导教师评语: 小组所得分数: 一个完整的实验,应包括数据准备、理论基础、实验内容及方法,最终对实验结果进行分析,以达到对理论知识的感性认识,进一步加深对相关算法的理解,数值实验以实验报告形式完成,实验报告格式如下: 一、实验名称 实验者可根据报告形式需要适当写出. 二、实验目的及要求 首先要求做实验者明确,为什么要做某个实验,实验目的是什么,做完该实验应达到什么结果,在实验过程中的注意事项,实验方法对结果的影响也可以以实验目的的形式列出. 三、算法描述(实验原理与基础理论) 数值实验本身就是为了加深对基础理论及方法的理解而设置的,所以要求将实验涉及到的理论基础,算法原理详尽列出. 四、实验内容 实验内容主要包括实验的实施方案、步骤、实验数据准备、实验的算法以及可能用到的仪器设备. 五、程序流程图 画出程序实现过程的流程图,以便更好的对程序执行的过程有清楚的认识,在程序调试过程中更容易发现问题. 六、实验结果 实验结果应包括实验的原始数据、中间结果及实验的最终结果,复杂的结果可以用表格 形式列出,较为简单的结果可以与实验结果分析合并出现. 七、实验结果分析 实验结果分析包括对对算法的理解与分析、改进与建议. 数值实验报告范例 为了更好地做好数值实验并写出规范的数值实验报告,下面给出一简单范例供读者参考. 数值实验报告 小组名称: 小组成员(班号): 按贡献排序情况: 指导教师评语: 小组所得分数: 一、实验名称 误差传播与算法稳定性. 二、实验目的 1.理解数值计算稳定性的概念. 2.了解数值计算方法的必要性. 3.体会数值计算的收敛性与收敛速度. 三、实验内容 计算dx x x I n n ? += 1 10 ,1,2,,10n = . 四、算法描述 由 dx x x I n n ? += 1 10 ,知 dx x x I n n ?+=--101110,则 土木工程与力学学院交通运输工程系 实 验 报 告 课程名称:交通仿真实验 实验名称:基于VISSIM的城市交通仿真实验 专业:交通工程 班级: 1002班 学号: U201014990 姓名:李波 指导教师:刘有军 实验时间: 2013.09 ---- 2013.10 实验报告目录 实验报告一: 无控交叉口冲突区设置与运行效益仿真分析 实验报告二: 控制方式对十字交叉口运行效益影响的仿真分析实验报告三: 信号交叉口全方式交通建模与仿真分析 实验报告四: 信号协调控制对城市干道交通运行效益的比较分析实验报告五: 公交站点设置对交叉口运行效益的影响的仿真分析实验报告六: 城市互通式立交交通建模与仿真分析 实验报告七: 基于VISSIM的城市环形交叉口信号控制研究 实验报告成绩 实验报告一: 无控交叉口冲突区设置与运行效益仿真分析 一、实验目的 熟悉交通仿真系统VISSIM软件的基本操作,掌握其基本功能的使用. 二、实验内容 1.认识VISSIM的界面; 2.实现基本路段仿真; 3.设置行程时间检测器; 4.设置路径的连接和决策; 5.设置冲突区 三、实验步骤 1、界面认识: 2、(1)更改语言环境—(2)新建文件—(3)编辑基本路段—(4)添加车流量 3、(1)设置检测器—(2)运行仿真并输出评价结果 4、(1)添加出口匝道—(2)连接匝道—(3)添加路径决策—(4)运行仿真 5、(1)添加相交道路—(2)添加车流量—(3)设置冲突域—(4)仿真查看 四、实验结果与分析 时间; 行程时间; #Veh; 车辆类别; 全部; 编号: 1; 1; 3600; 18.8; 24; 可知:检测器起终点的平均行程时间为:18.8; 五、实验结论 1、检测器设置的地点不同,检测得到的行程时间也不同。但与仿真速度无关。 2、VISSIM仿真系统的数据录入比较麻烦,输入程序相对复杂。 实验报告二: 控制方式对十字交叉口运行效益影响的仿真分析 一、实验目的 掌握十字信号交叉口处车道组设置、流量输入、交通流路径决策及交通信号控制等仿真操作的方法和技巧。 二、实验内容 1.底图的导入 2.交叉口专用车道和混用车道的设置方法和技巧 3.交通信号设置 4.交叉口冲突区让行规则设置 一、系统描述 1.1.系统背景 本系统将基于下面的卫星屏幕快照创建一个模型。当前道路网区域的两条道路均为双向,每个运动方向包含一条车道。Tapiolavagen路边有一个巴士站,Menninkaisentie路边有一个带五个停车位的小型停车场。 1.2.系统描述 (1)仿真十字路口以及三个方向的道路,巴士站,停车点;添加小汽车、公交车的三维动画,添加红绿灯以及道路网络描述符; (2)创建仿真模型的汽车流程图,三个方向产生小汽车,仿真十字路口交通运行情况。添加滑条对仿真系统中的红绿灯时间进行实时调节。添加分析函数,统计系统内汽车滞留时间,用直方图进行实时展示。 二、仿真目标 1、timeInSystem值:在流程图的结尾模块用函数统计每辆汽车从产生到丢弃的,在系统中留存的时间。 2、p_SN为十字路口SN方向道路的绿灯时间,p_EW为十字路口EW方向道路的绿灯时间。 3、Arrival rate:各方向道路出现车辆的速率(peer hour)。 三、系统仿真概念分析 此交通仿真系统为低抽象层级的物理层模型,采用离散事件建模方法进行建模,利用过程流图构建离散事件模型。 此十字路口交通仿真系统中,实体为小汽车和公交车,可以源源不断地产生;资源为道路网络、红绿灯时间、停车点停车位和巴士站,需要实施分配。系统中小汽车(car)与公共汽车(bus)均为智能体,可设置其产生频率参数,行驶速度,停车点停留时间等。 四、建立系统流程 4.1.绘制道路 使用Road Traffic Library中的Road模块在卫星云图上勾画出所有的道路,绘制交叉口,并在交叉口处确保道路连通。 4.2.建立智能体对象 使用Road Traffic Library中的Car type模快建立小汽车(car)以及公共汽车(bus)的智能体对象。 4.3.建立逻辑 使用Road Traffic Library中的Car source、Car Move To、Car Dispose、 合肥工业大学 计算机与信息学院 实验报告 课程:虚拟现实与仿真技术 专业班级:计算机科学与技术11-2班 学号: 姓名:谢云飞 实验一 一.实验名称 从3Dmax8中导出mesh并添加mesh到场景。 二.实验过程或实验程序(增加的代码及代码注解) 启动3Dmax 1.在安装有3Dmax8的计算机上,可以使用两种不同的方法来启动3Dmax8: (1)在桌面上双击“3Dmax8”图标 (2)点击“开始”菜单,在“程序”中的选择“3Dmax8” 2.观察3Dmax8主窗口的布局。3Dmax8主要由若干元素组成:菜单栏、工具栏、以及停靠在右边的命令面板和底部的各种工具窗口 使用3Dmax8建模并导出mesh 导出mesh的步骤如下: 1.启动3Dmax8 2.在停靠在右边的命令面板中,点击几何体按钮 3.选择标准几何体 4.在对象类型中选择对象(如:长方体),在“前”视口中,通过单击鼠标左键,创建出模型 5.在工具栏中单击“材质编辑器”按钮,通过上步操作,可开启“材质编辑器”对话框 6.在“材质编辑器”对话框中,点击漫反射旁方形按钮,进入到“材质/贴图浏览器” 7.在“材质/贴图浏览器”中选择位图,鼠标左键双击位图 8.弹出选择位图图像文件对话框,从本地电脑中选择一张图片 9.选择好图片,在材质编辑器对话框中,点击将材质指令给选定对象 10.点击菜单栏上的oFusion按钮,在弹出的菜单栏中选择Export Scene 11.选择文件夹并输入文件名qiu,点击保存,在弹出的对话框中勾选Copy Textures,点击Export按钮,此时mesh文件已成功导出 导出的mesh文件放入到指定位置 1.找到mesh文件,把mesh文件放到当前电脑的OgreSDK的models中,以我的电脑为例,OgerSDK放在C盘中 2.打开C盘,找到OgreSDK,打开OgreSDK,找到media,打开media文件夹,找到models,打开models文件夹,将mesh文件复制到此文件夹中 3.将导出mesh文件附带的材质文件放到OgreSDK的scripts (C:\OgreSDK\media\materials\scripts)中 4.将导出mesn文件时同时导出的图片放到OgreSDK的textures (C:\OgreSDK\media\materials\textures)中 (完整)交通仿真实验报告 编辑整理: 尊敬的读者朋友们: 这里是精品文档编辑中心,本文档内容是由我和我的同事精心编辑整理后发布的,发布之前我们对文中内容进行仔细校对,但是难免会有疏漏的地方,但是任然希望((完整)交通仿真实验报告)的内容能够给您的工作和学习带来便利。同时也真诚的希望收到您的建议和反馈,这将是我们进步的源泉,前进的动力。 本文可编辑可修改,如果觉得对您有帮助请收藏以便随时查阅,最后祝您生活愉快业绩进步,以下为(完整)交通仿真实验报告的全部内容。 土木工程与力学学院交通运输工程系 实 验 报 告 课程名称:交通仿真实验 实验名称:基于VISSIM的城市交通仿真实验 专业:交通工程 班级: 1002班 学号: U201014990 姓名:李波 指导教师: 刘有军 实验时间: 2013。09 -——- 2013.10 实验报告目录 实验报告一: 无控交叉口冲突区设置与运行效益仿真分析 实验报告二: 控制方式对十字交叉口运行效益影响的仿真分析 实验报告三: 信号交叉口全方式交通建模与仿真分析 实验报告四: 信号协调控制对城市干道交通运行效益的比较分析 实验报告五: 公交站点设置对交叉口运行效益的影响的仿真分析 实验报告六: 城市互通式立交交通建模与仿真分析 实验报告七: 基于VISSIM的城市环形交叉口信号控制研究 实验报告成绩 实验报告一: 无控交叉口冲突区设置与运行效益仿真分析 一、实验目的 熟悉交通仿真系统VISSIM软件的基本操作,掌握其基本功能的使用。 二、实验内容 1。认识VISSIM的界面; 2.实现基本路段仿真; 3.设置行程时间检测器; 4.设置路径的连接和决策; 5。设置冲突区 三、实验步骤 1、界面认识: 2、(1)更改语言环境—(2)新建文件—(3)编辑基本路段-(4)添加车流量 3、(1)设置检测器—(2)运行仿真并输出评价结果 4、(1)添加出口匝道—(2)连接匝道-(3)添加路径决策-(4)运行仿真 5、(1)添加相交道路—(2)添加车流量-(3)设置冲突域—(4)仿真查看 四、实验结果与分析 哈尔滨理工大学实验报告 控制系统仿真 专业:自动化12-1 学号:1230130101 姓名: 一.分析系统性能 课程名称控制系统仿真实验名称分析系统性能时间8.29 地点3# 姓名蔡庆刚学号1230130101 班级自动化12-1 一.实验目的及内容: 1. 熟悉MATLAB软件的操作过程; 2. 熟悉闭环系统稳定性的判断方法; 3. 熟悉闭环系统阶跃响应性能指标的求取。 二.实验用设备仪器及材料: PC, Matlab 软件平台 三、实验步骤 1. 编写MATLAB程序代码; 2. 在MATLAT中输入程序代码,运行程序; 3.分析结果。 四.实验结果分析: 1.程序截图 得到阶跃响应曲线 得到响应指标截图如下 2.求取零极点程序截图 得到零极点分布图 3.分析系统稳定性 根据稳定的充分必要条件判别线性系统的稳定性最简单的方法是求出系统所有极点,并观察是否含有实部大于0的极点,如果有系统不稳定。有零极点分布图可知系统稳定。 二.单容过程的阶跃响应 一、实验目的 1. 熟悉MATLAB软件的操作过程 2. 了解自衡单容过程的阶跃响应过程 3. 得出自衡单容过程的单位阶跃响应曲线 二、实验内容 已知两个单容过程的模型分别为 1 () 0.5 G s s =和5 1 () 51 s G s e s - = + ,试在 Simulink中建立模型,并求单位阶跃响应曲线。 三、实验步骤 1. 在Simulink中建立模型,得出实验原理图。 2. 运行模型后,双击Scope,得到的单位阶跃响应曲线。 四、实验结果 1.建立系统Simulink仿真模型图,其仿真模型为 物理仿真实验报告1 物理仿真实验报告 受迫振动 班级应物01 姓名赵锦文 学号10093020 一、实验简介 在本实验中,我们将研究弹簧重物振动系统的运动。在这里,振动中系统除受弹性力和阻尼力作用外,另外还受到一个作正弦变化的力的作用。这种运动是一类广泛的实际运动,即一个振动着的力学体系还受到一个作周期变化的力的作用时的运动的一种简化模型。如我们将会看到的,可以使这个体系按照与施加力相同的频率振动,共振幅既取决于力的大小也取决于力的频率。当力的频率接近体系的固有振动频率时,“受迫振动”的振幅可以变得非常大,这种现象称为共振。共振现象是重要的,它普遍地存在于自然界,工程技术和物理学各领域中.共振概念具有广泛的应用,根据具体问题中共振是“利”还是“害”,再相应地进行趋利避害的处理。 两个相互耦合的简谐振子称为耦合振子,耦合振子乃是晶体中原子在其平衡位置附近振动的理想模型。 本实验目的在于研究阻尼振动和受迫振动的特性,要求学生测量弹簧重物振动系统的阻尼常数,共振频率。 二、实验原理 1.受迫振动 砝码和挂钩 弹簧 弹簧 振荡器 图13.1 受迫振动 质量M 的重物按图1放置在两个弹簧中间。静止平衡时,重物收到的合外力为0。当重物被偏离平衡位置时,系统开始振动。由于阻尼衰减(例如摩擦力),最终系统会停止振动。振动频率较低时,可以近似认为阻力与振动频率成线性关系。作用在重物上的合力: x M x Kx x x k x k F 21=--=---=ββ 其中k1, k2是弹簧的倔强系数。 K = k1+ k2是系统的等效倔强系数。 x 是重物偏离平衡位置的距离, β 是阻尼系数。 因此重物的运动方程可表示为: 22 0=++x x x ωγ 其中 γβ=M and ω02 =K M 。 在欠阻尼状态时(ωγ0>),方程解为: ) cos(22 0 φγωγ+-=-t Ae x t A, φ 由系统初始态决定。方程的解是一个幅度衰减的谐振动,如图2所示。 T 图13.2 衰减振动 振动频率是: f T = =-11202 2π ωγ (13.1) 如果重物下面的弹簧1k 由一个幅度为a 的振荡器驱动,那么这个弹簧作用于重物的力是) cos (1x t a k -ω。此时重物的运动方程为: M t a k x x x cos 212 0ωωγ= ++ . 方程的稳态解为: ) cos(4)(2 2 2 22 1θωω γωω-+-= t M a k x (13.2) 其中 )2(tan 2 201 ωωγω θ-=-。图13.3显示振动的幅度与频率的关系。 南京信息工程大学实验(实习)报告 一、实验目的: 用最小二乘法将给定的十个点拟合成三次多项式。 二、实验步骤: 用matlab编制以函数为基的多项式最小二乘拟合程序,并用于对下列数据作三次多项式最小二乘拟合(取权函数wi=1) x -2.5 -2 -1.5 -1 -0.5 0 0.5 1 1.5 2 y -2.30 -1 -0.14 -0.25 0.61 1.03 1.75 2.75 4.42 6.94 给定直线方程为:y=1/4*x3+1/2*x2+x+1 三、实验结论: 最小二乘法:通过最小化误差的平方和寻找数据的最佳函数匹配。利用最小二乘法可以简便地求得未知的数据,并使得这些求得的数据与实际数据之间误差的平方和为最小。最小二乘法还可用于曲线拟合。 一般地。当测量数据的散布图无明显的规律时,习惯上取n次代数多项式。 程序运行结果为: a = 0.9731 1.1023 0.4862 0.2238 即拟合的三次方程为:y=0.9731+1.1023x+0.4862*x2+0.2238*x3 -2.5 -2-1.5-1-0.5 00.51 1.52 2.5 -4-20246 81012 x 轴 y 轴 拟合图 离散点 y=a(1)+a(2)*x+a(3)*x.2+a(4)*x.3 结论: 一般情况下,拟合函数使得所有的残差为零是不可能的。由图形可以看出最小二乘解决了残差的正负相互抵消的问题,使得拟合函数更加密合实验数据。 优点:曲线拟合是使拟合函数和一系列的离散点与观测值的偏差平方和达到最小。 缺点:由于计算方法简单,若要保证数据的精确度,需要大量的数据代入计算。 《电磁场与电磁波》课程 仿真实验报告 学号U201213977 姓名唐彬 专业电子科学与技术 院(系)光学与电子信息学院2014 年12 月 3 日 1.实验目的 学会HFSS仿真波导的步骤,画出波导内场分布图,理解波的传播与截止概念。 2.实验内容 在HFSS中完成圆波导的设计与仿真,要求完成电场、磁场、面电流分布、传输曲线、色散曲线和功率的仿真计算。 3.仿真模型 (1)模型图形 (2)模型参数 (3)仿真计算参数 根据圆波导主模为TE 11, 1111 '=1.841 c f a p ==为半径, a=1mm,代入公式得截止频率f=8.8GHz,因此设置求解频率为11GHz,起始频率为9GHz,终止频率为35GHz。 4.实验结果及分析 4..1电场分布图 图形分析:将垂直于Z周的两个圆面设为激励源,利用animate选项可以发现,两个圆面上的电场强度按图中的颜色由红变蓝周期性变化,图形呈椭圆形,且上底面中心为红色时,下底面中心为蓝色。即上底面中心的电场强度最大时,下底面中心的电场强度为最小。这是由于波的反射造成的。对于圆波导的侧面,由动态图可知电场强度始终处于蓝绿色,也就是一直较小。这说明电场更多的是在两底面,即两激励源之间反射,反射到侧面上的电场较少。 4..2磁场分布图 图形分析:根据电场与磁场的关系式——课本式(9.46)可知,电场的大小是磁场大小的c倍(c为真空中的光速),电场方向与磁场方向处处垂直,在图中也可看出,波导中磁场的最大值出现在侧面,两底面的中心的颜色为蓝绿色,且底面的两边为双曲线的形状,这就是磁场与电场相互垂直的结果。另一方面,根据图中各个颜色代表的场强大小也可以近似验证,电场与磁场的大小的确是c倍的关系。而且在导体中的电磁波,磁场与电场还存在相位差,这一点也可从两者的动态图中验证该结论。 运动控制仿真实验报告 姓名:班级:学号: ——晶闸管三相全控桥式整流仿真实验 ——实用 Buck 变换仿真实验 晶闸管三相全控桥式整流仿真实验(大电感负载) 原理电路: R2 晶闸管三相可控整流仿真实验2原理电路框图 输入三相交流电,额定电压380伏(相电压220伏),额定频率50Hz,星型联接。输入变压器可省略。为便于理解电路原理,要求用6只晶闸管搭建全控桥。 实验内容: 1、根据原理框图构建Matlab仿真模型。所需元件参考下表: 仿真元件库:Simulink Library Browser 示波器Simulink/sink/Scope 要观察到整个仿真时间段的结果波形必须取消对输出数据的5000点限制。 要观察波形的FFT结果时,使能保存数据到工作站。仿真结束后即可点击仿真模型左上方powergui打开FFT窗口,设定相关参数:开始时间、分析波形的周期数、基波频率、最大频率等后,点Display即可看到结果。 交流电源SimPowerSystems/Electrical Sources/AC Voltage Source 设定频率、幅值、相角,相位依次滞后120度。 晶闸管SimPowerSystems/Power Electronics/Thyristor 6脉冲触发器SimPowerSystems/Extra Library/Control Blocks/Synchronized 6-Pulse Generator 设定为50Hz,双脉冲 利用电压检测构造线电压输入。Block端输入常数0. 输出通过信号分离器分为6路信号加到晶闸管门极,分离器输出脉冲自动会按顺序从1到6排列,注意按号分配给主电路对应晶闸管。 电阻、电容、电感SimPowerSystems/Elements/Series RLC Branch 设定参数 负载切换开关SimPowerSystems/Elements/Breaker 设定动作时间 信号合成、分离Simulink/Signal Routing/Demux,Mux 电流傅立叶分解SimPowerSystems/Extra Library/Discrete Measurements/Discrete Fourier 设定输出为50Hz,基波 有效值SimPowerSystems/Extra Library/Discrete Measurements/Discrete RMS value 设定为50Hz 位移功率因数计算Simulink/User-Difined Functions/Fcn 将度转换为弧度后计算余弦 本科生实验报告 填写说明 1、适用于本科生所有的实验报告(印制实验报告册除外); 2、专业填写为专业全称,有专业方向的用小括号标明; 3、格式要求: ①用A4纸双面打印(封面双面打印)或在A4大小纸上用蓝黑色水笔书写。 ②打印排版:正文用宋体小四号,1.5倍行距,页边距采取默认形式(上下2.54cm,左 右2.54cm,页眉1.5cm,页脚1.75cm)。字符间距为默认值(缩放100%,间距:标准); 页码用小五号字底端居中。 ③具体要求: 题目(二号黑体居中); 。 实验一数控车床操作加工仿真实验 一、实验目的 1、掌握手工编程的步骤。 2、掌握数控加工仿真系统的操作流程。 二、实验内容 1、了解数控仿真软件的应用背景。 2、掌握手工编程的步骤。 3、掌握SEMENS 802Se T 数控加工仿真操作流程。 三、实验设备 1、AUTO CAD 2014。 2、南京宇航数控加工仿真软件。 四、实验操作步骤 1、实验试件 试件的形状、尺寸如图1-1所示 2、加工采用的刀具参数 刀具及相关参数如表1-1所示 3、工序卡片根据零件材料、加工精度、加工路线、刀具参数表和切削用量等内容,确定加 工工序卡,如表1-2所示。 4、程序 5、加工仿真操作步骤 五、加工视窗 Yhcnc 输出信息 消息模式 欢迎使用YHCNC, 更多资料请登录https://www.doczj.com/doc/1e15655100.html, 2017-03-29 15:20 。。。 评分模式 欢迎使用YHCNC, 更多资料请登录https://www.doczj.com/doc/1e15655100.html, 2017-03-29 15:20 。。。 六、思考题 1、数控加工中的误差来源有哪些? 答:计算方法实验报告格式
交通仿真实验报告
交通运输系统仿真实验报告
虚拟现实与仿真实验报告
(最新整理)交通仿真实验报告
控制系统仿真实验报告
物理仿真实验报告1
计算方法实验报告 拟合
HFSS波导仿真实验报告参考模板
运动控制仿真实验报告
数控机床仿真实验报告模板参考
相关主题
文本预览