
第二章数学基础
2.1 引言
机器人操作手的研究涉及物体之间以及物体与操作手之间的关系。在这一章中,我们将研究描述这些关系所需的表示方法。在同样必须描述物体之间关系的计算机制图学领域中,已经解决了类似的表示方法问题。在该领域以及计算机视觉方面使用了齐次变换。这些变换以前Denavit用来描述连杆机构。而现在我们用这些变换来描述操作手。
我们将首先建立向量和平面的符号,再在这些符号基础上引入变换。这些变换主要由移动和转动所组成。接着将表明,这些变换也可以作为表示包括操作手在内的物体的坐标架。然后将引入逆变换。后一节叙述绕任一向量旋转的一般旋转变换。再介绍一种算法,以用来找出用任何已知变换表示的等效旋转轴和等效旋转角。伸张和缩放变换的一小节,连同透视变换一节也包含在本章中。这一章用一节关于变换方程的内容来作为结尾。
2.2 符号
在描述物体间关系时,我们将利用点向量、平面和坐标架。点向量用小写黑体印刷符号表示,平面用手写体印刷符号表示,坐标架则用大写黑体印刷符号表示。例如:
向量v, xl, x
平面∏, Θ
坐标架I, A, CONV
我们将把点向量、平面和坐标架作为具有关联数值的变量使用。例如,一个点向量就具有三个笛卡尔坐标分量。
如果希望相对于坐标架E来描述空间一个称为p的点我们将用一个称为v的向量,并将这一向量写成
E
V
前置的上标表示所定义的坐标架。
我们也可以利用向量w相对于例如H这样的不同坐标架,来描述相同的点p为
H
W
v和w是两个很可能具有不同分量的向量,虽然两个向量描述相同的点p,但v≠w。也可能存在这种情况,用一个向量a来描述在任一坐标架上面3英寸地方的一个点
F2a
1a
F
在这一情况中,向量是完全相同的,但是描述了不同的点,通常文中定义的坐标架是明显的,这时上标就不用。在许多情况中,向量的名称将与被描述的物体的名称相同,例如,销的末端可以用相对于坐标架BASE的向量tip来描述
B A SE
tip
如果文中相对于BASE描述向量是明显的,则我们可以简单地写为
tip
如果还希望相对于另一坐标架HAND 来描述这一点,则我们必须用另一向量来描述这一关系,例如
tv HAND
tv HAND
和tip 两者描述相同的物件,但有着不同的值。为了涉及到坐标架、向量或平面的
每一分量,我们添加下标来表示特定分量。例如,矢量
tv HAND
有分量
tv H A N D
x ,
tv H A N D
y ,
tv H A N D
z 。
2.3 向量
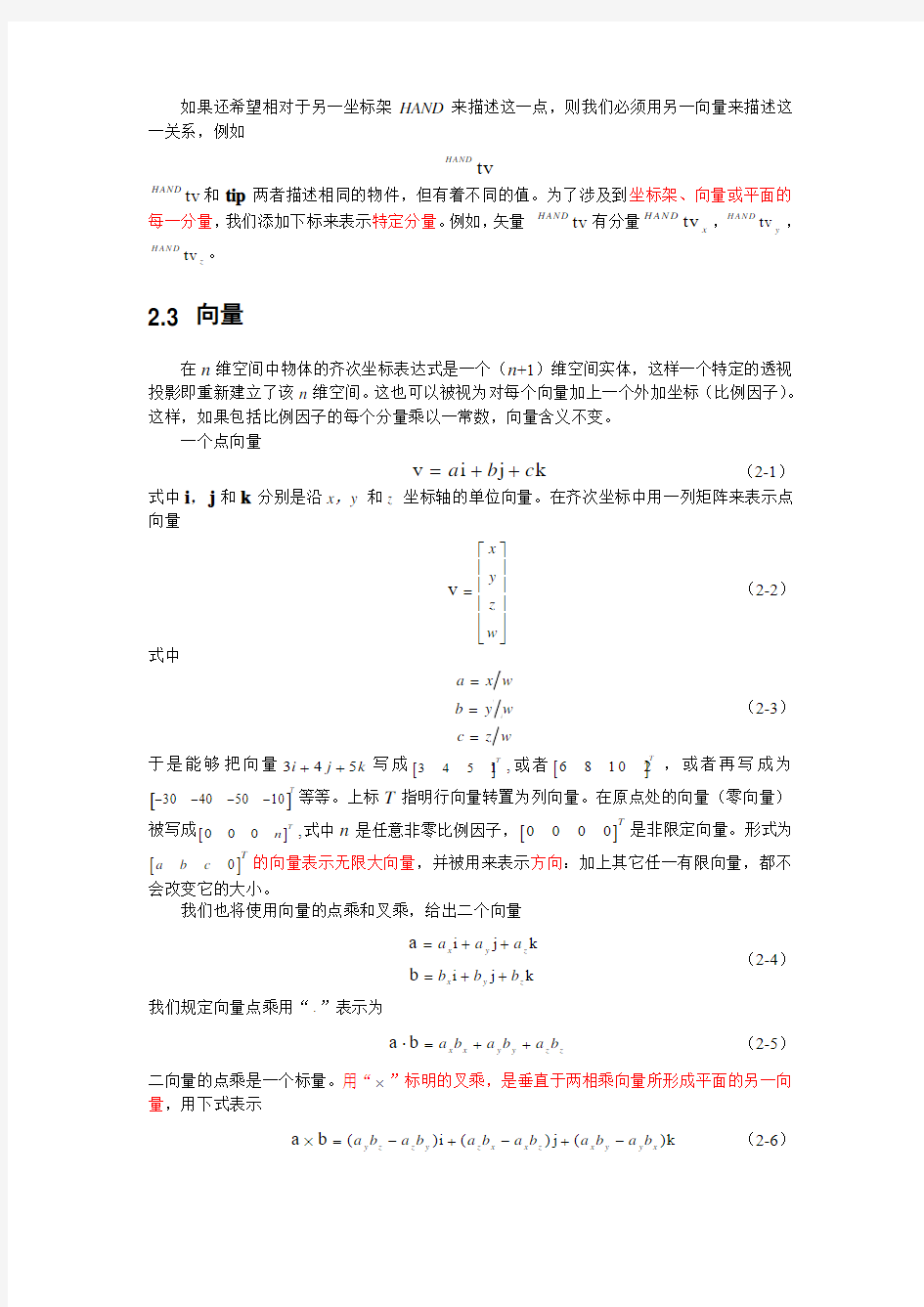
在n 维空间中物体的齐次坐标表达式是一个(n +1)维空间实体,这样一个特定的透视投影即重新建立了该n 维空间。这也可以被视为对每个向量加上一个外加坐标(比例因子)。这样,如果包括比例因子的每个分量乘以一常数,向量含义不变。
一个点向量
v i j k a b c =++ (2-1)
式中i ,j 和k 分别是沿x ,y 和z 坐标轴的单位向量。在齐次坐标中用一列矩阵来表示点向量
v
x y
z w ??????=??????
(2-2) 式中
a x w
b y w
c z w
=== (2-3) 于是能够把向量345i j k ++写成[]
3
45
1T
,或者[]6
810
2T
,或者再写成为
[]30
405010T
----等等。上标
T 指明行向量转置为列向量。在原点处的向量(零向量)
被写成[]
T
n ,式中n 是任意非零比例因子,[]0
0T
是非限定向量。形式为
[]0T
a
b
c
的向量表示无限大向量,并被用来表示方向:加上其它任一有限向量,都不
会改变它的大小。
我们也将使用向量的点乘和叉乘,给出二个向量
i j k i j k
a b x y z x y z a a a b b b =++=++ (2-4)
我们规定向量点乘用“?”表示为
a b x x y y z z a b a b a b =++? (2-5)
二向量的点乘是一个标量。用“?”标明的叉乘,是垂直于两相乘向量所形成平面的另一向量,用下式表示
()i ()j ()k a b y z z y z x x z x y y x a b a b a b a b a b a b =-+-+-? (2-6)
这一定义作为行列式展开更易于记忆
x
y z x
y
z a a a b b b ????
=??????
?i j k a b
(2-7) 2.4 平面
一个平面可以用一个行矩阵来表示
[],,,a b c d =P (2-8)
这样,如果点v 位于∏平面中,矩阵乘积
V
0=P
(2-9)
或展开为
0xa yb zc d ω+++= (2-10)
如果我们定义一常数
m = (2-11)
将方程2-10除以m ω得
x a
y b
z c
d
m m m m
ωωω+
+
=-
(2-12)
方程2-12左边是k z j y i x )/()/()/(ωωω++和k m c j m b i m a )/()/()/(++两向量的点乘,表示点k z j y i x )/()/()/(ωωω++沿向量k m c j m b i m a )/()/()/(++的指向的距离。
向量k z j y i x )/()/()/(ωωω++可被理解为是在法线方向上离原点距离为d m -的平面的一条外指法线。于是平行于,x y 平面,沿z 一个单位的平面P 可表示为
]1,1,0,0[-=P (2-13)
或 ]2,2,0,0[-=P (2-14)
或 ]100,100
,0,0[-=P (2-15) 点[]10,
20,1,1v =将落在这一平面中
[]1020
0,
0,100,
100011??????-=?????? (2-16)
或
[]510
0,
0,1,
100.50.5-????-?
?-=??-??-??
(2-17) 点[]0,
0,
2,
1v =位于平面上面
[]00
0,
0,2,
2221??????-=??????
(2-18)
v P 实际是正数,表明点在平面之外,而在外指法线方向上。点[]0,
0,0,1
v =位于平
面之下
[]00
0,
0,1,
1101??????-=-??????
(2-19)
平面[]0,
0,0,
0是非限定的。
2.5 变换
空间变换H 是一个4?4矩阵,能够用来表示移动,转动。伸展和透视变换。给出一点u ,它的变换v 矩阵乘积表示为
v H u = (2-20)
从∏到 Θ 的相应平面变换为
1
- =H
Q P (2-21)
这是因为我们要求条件
v u =Q P (2-22)
在所有变换中不变。为了证实这一点,我们将公式2.20和2.21代入公式2.22的左边。由于1
-H H 为单位矩阵I ,故得
1
-H Hu =u P P (2-23)
2.6 移动变换
相应于用向量i j k a b c ++表示的移动变换H 是
H T ran s =100010(,,)0010
1a b
a b c c ??????=??????
(2-24) 给出向量(,,,)T
u x y z ω=,则得变换后的向量v 为
1000100010
1v a x b y
c z ω????????????=??????????
??
(2-25)
1x a x a y b y b
z c z c ωωωωωω++????????++?
???==????++????
????
v (2-26) 移动也可以解释为两个向量()()()i j k x y z ωωω++与i j k a b c ++之和。
如同点和平面一样,变换矩阵的每个元素,可乘以一非零常数而变换不变。现考虑将矢量232i j k ++移动,或是与437i j k -+相加
610042001033
90017210
11????????????-??????=??????????????????
(2-27) 如果把变换矩阵元素乘以5-,而将向量元素乘以2,我们得到
-605002040050156
-90005354-100
52--??????
??????-??????=??????
--??????-??????
(2-28) 这和上述向量[]6,
0,9,
1T
一致。点[]2,
3,
2,
1T
落在平面[]1,
0,0,
2-中
[]23
1,
0,0,
2021??????-=??????
(2-29)
正如我们已得到的一样,变换点是[]6,0,
9,
1T
。现在我们来计算变换后的平面。逆变
换是
1004010300170
1-????????-???? 而变换后的平面是
[][]10040103
1
00
61
00
200170
1-??????-=-??-????
(2-30) 变换后的点再次落在变换后的平面中
[]60
1
00
6091??????-=??????
(2-31)
2.7 转动变换
相应于绕,x y 或z 轴转过角度θ的变换是
R ot 10000
cos sin 0
(,)0sin cos 00
01θθθθθ????-?
?=??????
x (2-32) R ot cos 0sin 00
100
(,)sin 0cos 00001θθθθθ???
??
?=??-????
y (2-33) R ot cos sin 00sin cos 00
(,)00100
1θθθθθ-???
???=
??????
z (2-34) 让我们用例子来解释这些转动。给出一点u 732i j k =++,将它绕z 轴转90 至v ,其结果如何?将sin 1θ=和cos 0θ=代入公式2-34,得到变换为
301007710003
20010210
11--??????????????????=??????????????????
(2-35) 始点和终点如图2-1所示,点确实绕z 轴转过90
。现在让我们将v 绕y 轴转90
到w 。我们可从公式2-33得到变换,有
200103701007
31000210
11-??????????????????=??????-????????????
(2-36) y
这一结果如图2-2所示。如果将两个变换结合起来,我们有
v R ot =(,90)z u (2-37)
和 v R o t =(,90)y u (2-38)
将公式2-37的v 代入公式2-38得
w R ot =(,90)y R ot (,90)z u (2-39)
R ot (,90)y R ot (,90)z 0
01001000
1001000
-100000100
0100
1-?????????
???=????????????
(2-40) R ot (,90)y R ot (,90)z 00101
000
010000
1?????
?=??????
(2-41) 于是
w =200107710003
30100210
11???????????????
???=??????????????????
(2-42) 这与我们在前面所得到的一致。
如果我们颠倒转动的次序,首先绕y 轴转90
,再绕z 轴转90
,我们得到一不同位置 R ot (,90)z R ot (,90)y 0100001001001
00001000010
0010100010000
10
10
1--?????????????
?????==??????--????????????
(2-43)
且点u 变换至w 为
301007200103
71000210
11--??????????????????=??????--????????????
(2-44) 我们应该预料到这一点,因为矩阵相乘是不能交换的。
A B B A ≠ (2-45) 这一变换结果如图2-3所示.
现在我们将原先的转动与移动437i j k -+结合起来。我们从公式2-27得到移动,从公式2.41得到转动。矩阵表达式是
T ran s (4,3,7)-R ot (,90)y R ot (,90)z 10040
0100
1031000001701000
10
1????????-?
???=????????????
00141003
01070
1????-??=??????
(2-46) 且点w =732i j k ++变换至X 为
600147410033
100107210
11????????????-??????=??????????????????
(2-47) 其结果如图2-4所示。
y
图2-3 Rot(z,90)Rot(y ,90) y
图2-4 T rans(4,3,7)Rot(y,90)Rot(z,90)
2.8 坐标架
我们可以把齐次变换的元素理解为描述另一坐标架的四个向量。向量[]0
00
1T
位
于另一坐标架的原点。它的变换是和变换矩阵右边那一列相对应。考虑公式2.47中的变换
40
0140310030
70107010
11????????????--??????=??????????????????
(2-48) 可见零向量的变换是[]4,
3,7,
1T
-,即变换矩阵右边那一列。如果我们对沿,x y 和z 轴
的单位向量进行变换,可分别得到[]4,2,7,1T
-,[]4,3,8,1T
-和[]5,3,7,1T
-。这四个向量绘在图2-5上,并行成一个坐标架。
减去可以表示这一坐标架原点的向量,利用把它的比例因子降低至零使向量延长至无穷远,就形成了这些单位向量的方向。这一坐标架,x y 和z 轴的方向,分别是[]0,1,0,0T
,
[]
0,0,1,0T
和[]1,0,0,0T
。这些方向向量相应于变换矩阵的前三列。于是变换矩阵完全描述
了坐标架经转动和移动而离开参考坐标架后的原点位置和三坐标轴方向(见图2-5)。当一向量如在公式2.47中进行变换时,原向量可作为坐标架中所描述的向量,变换后的向量则是在参考坐标架中所描述的同一向量(见图2-6)。
2.9 相对变换
我们所描述的转动和移动,都是相对于固定参考坐标架得到的。因而在给出的例子中
T ran s (4,3,7)-R ot (,90)y R ot (,90)z 00041
003
01070
1????-?
?=??????
(2-49)
坐标架首先绕z 参考轴旋转90
,然后绕y 参考轴旋转90
,最后移动437i j k -+,如图
y
y
2-5所示。我们也可以按从左到右的相反顺序来解释过程如下:物体首先移动437i j k -+,然后将它绕着(当前)坐标轴(在这一情况下同于参考轴)旋转90 ,再将它绕新旋转的(当前)坐标轴旋转90 (见图2-7)。
通常,如果在一个表示坐标架的变换后面,乘上描述移动和(或)转动的第二个变换,我们得到相对于用第一个变换所描述的坐标架进行的移动和(或)转动。如果在坐标变换前面,乘以一个表示移动和(或)转动的变换,则得到相对于基础参考坐标架的移动和(或)转动。因此,给出坐标架C 以及相应于绕z 轴转90 和沿x 方向移10个单位的变换T ,当变换在基础坐标中发生时,我们得到一新的位置X ,X T C =
0010010101002010020100000110
0100001001000
10
10
1-????????????-??????=??????????????????
(2-50) 而当变换相对于坐标架而发生时,则得到新的位置Y ,Y C T =
y
01030100200101000110001101000
10000100001000
010
10
1--???????
?????--?
?????=???????
???????????
(2-51) 变换结果如图2-8所示。
2.10 物体
变换可用来描述物体的位置和方位(姿态)。如图2-9所示的物体,借助相对于固定在物体中的坐标架的六个点来描述。
如果将物体绕z 轴转90 ,然后绕y 轴转90 ,再在x 轴方向将它移动4个单位,我们可以将该变换描述为
T ran s (4,0,0)R ot (,90)y R ot (,90)z
00141000
01000001?????
?=????
??
(2-52) 变换矩阵表示原先与参考坐标架重合的坐标架所作的转动和移动,物体六个点将变换为
44664400141111111111111000000044
00004401000022001
1
1
1
1
10
11
1
1
1
1
1---????????????---??????=??????????????????
(2-53) 变换的结果如图2-10所示。
可以看到,图中所描述的物体,与其上借助变换描述的位置和方位的坐标架,具有恒定的关系。给出一个用图2-9中的参考坐标架来描述的物体,以及表示物体轴线位置和方位的变换,我们仅需要标记物体相对于坐标轴的关键外廓的方向和方位,就能够简单地重新构造物体的形象,而无需变换所有点。利用画出经变换了的坐标架,物体能够与新的轴线方向建立起联系。在给出的例子中,楔块的长轴沿着坐标架的y 轴放置,因为已变换了的y 轴是在z 方向,长轴将在变换后的状态中直立起来,等等。
2.11 逆变换
我们现在能够研究一种把已变换了的坐标架搬回原坐标架的逆变换。这是参考坐标架相对于变换后坐标架的简单描述。考虑在图2-10中所给出的例子,对于变换后的坐标架,参
考坐标架x 轴的方向是[]0,
0,
1,0
T
,y 轴和z 轴分别是[]10,0
0T
和
[]0,
1,0,
0T
,而原点的位置是[]0,
0,
4,
1T
-,于是逆变换是
-1
T 0
1000010
10040
1?????
?=??-????
(2-54) 通过将它乘以变换T 得到一恒等变换,很容易证实变换的转置是正确的
100001000014010000101000
0010100401000
10
10
1??????????????????=??????-????????????
(2-55) 通常给出一带有元素的变换
T
1x x x x y y y y
z z z z n o a p n o a p n o a p ??????=??????
(2-56) 则其逆变换是
-1
T 0
1x y z x
y z x y z n n n o o o a a a -???
??-???=??
-?????
p n p o
p a (2-57) 式中p ,n ,o 和a 是四个列向量,而“?”表示向量点乘。将公式2-56后乘以公式2-57,很容易证实这一结果。
2.12 一般转动变换
我们以说明了绕x ,y 和z 轴旋转的转动变换(公式2-32,2-33和2-34)。这些变换都有一个简单的几何解释。例如,在绕z 轴转动的情况中,表示z 轴的那一列将保持不变,而表示x 和y 轴的列元素将如图2-11所示变化。
现在我们将研究绕过原点的任意向量k 转动的变换矩阵。对这一问题的完整讨论见[Hamilton]。为此,我们设想k 是坐标架C 的z 轴单位向量
C 00
00
1x x x y
y y z z n o a n o a n o a ??????=??????
(2-58) x y z a a a =++k i j k (2-59)
则绕向量k 的转动相当于绕坐标架C 的z 轴的转动。
R ot (,)θ=k R ot (,)z θc (2-60)
如果我们给出用参考坐标架描述的坐标架T ,我们就能够找到一坐标架X 以描述相对于坐标架C 的同一坐标架,即
=T C X (2-61)
式中X 描述T 相对于坐标架C 的位置。对X 求解得
=1-X C T (2-62)
绕k 转动T 即相当于绕坐标架C 中z 轴而转动X
R ot (,)θ=k T C R ot (,)z θX
(2-63)
R ot (,)θ=k T C R ot (,)z θ1-C T (2-64)
于是 R o t (,)θ=k C R o t (,)z θ1
-C (2-65)
但我们仅知道k ,坐标架C 的z 轴。展开公式2-65,我们将发现C R ot (,)z θ1-C 仅仅是k 的函数。
在(,)z θ1-R ot C 右乘上1-C ,我们得到
cos sin 000sin cos 000(,)0010000
10
1cos sin cos sin cos sin 0sin cos sin cos sin cos 0000
1x
y z x y z x y z x x y y z z x x y y z z x y z n n n o o o z a a a n o n o n o n o n o n o a a a θθθθθθθθθθθθθθθ
θθ
-?????
???????=
????????????
---???
?+++??=???
??
?
1-R ot C (2-66)
前面乘以
C 00
00
1x x x y y y z z n o a n o a n o a ??????=??????
(2-67) 我们可以得到C R ot (,)z θ=1
-C
cos sin sin cos cos sin sin cos cos sin sin cos 0x x x x x x x x x x y x
y x x y y x y x z x z x x z z x z x n n n o n o o o a a n n n o n o o o a a n n n o n o o o a a θθθθθθθθθθθθ-+++??
-+++??-+++?
?
cos sin sin cos cos sin sin cos cos sin sin cos 0
x y x y y x y x x y
y y y y y y y y y y z y z y y z y z z y
n n n o n o o o a a n n n o n o o o a a n n n o n o o o a a θθθθθθθθθθθθ-+++-+++-+++
y
cos sin sin cos 0cos sin sin cos 0
cos sin sin cos 00
1x z x z z x z x x z y z y z z y z y y z z z z z z z z z z z
n n n o n o o o a a n n n o n o o o a a n n n o n o o o a a θθθθθθθθθθθθ-+++??-+++??-+++??
(2-68) 利用下列关系进行简化:
C 的任何行或列和任何其它行或列的点乘等于零、因为向量是正交的; C 的任一行或列与其本身的点乘是1,因为各向量的单位值是1; z 单位向量是x 和y 向量的叉乘或
=?a n o (2-69)
它的分量是
x y z z y y z x x z z x y y x
a n o n o a n o n o a n o n o =-=-=- 简写成vers θ的versine ,被定义为vers (1cos )θθ=-,又,x x y y z z k a k a k a ===和。 我们得到(,)θ=Rot k
vers cos vers sin vers cos 0vers sin vers cos vers cos 0
vers sin vers sin vers cos 000
1x x y x z z x y x y
z y y z y x x z y y z x z z k k k k k k k k k k k k k k k k k k k k k k k k θθθθθθθθθθθθθθθθ
θθ
+-+??
?
?++-????-++?
??
?
(2-70) 这是一个重要的结果,在往后的进行之前,应彻底理解。
从这个一般转动变换中,我们能够得到每一个基本转动变换,例如(,)x θRot 是当
1x k =,0y k =和0z k =时的(,),k θRot 将这些k 值代入公式2.70,我们得到
10000
cos sin 0
(,)0sin cos 00
1x θθθθθ????-?
?=??????
R ot (2-71) 这与前述一致。
2.13 等效的旋转角和旋转轴
给出任一个转动变换,我们利用公式2-70求出一根轴,绕着它可如下述求出一等效转动的旋转角θ。给出这一转动变换R
00
00
1x x x y
y y z z z n o a n o a n o a ?????
?=??????
R (2-72) 我们可以令R 等于(,)θRot k
00
00
1x x x y y y z z z n o a n o a n o a ??
????=??????
vers cos vers sin vers cos 0vers sin vers cos vers cos 0
vers sin vers sin vers cos 000
1x x y x z z x y x y
z y y z y x x z y y z x z z k k k k k k k k k k k k k k k k k k k k k k k k θθθθθθθθθθθθθθθθ
θθ
+-+???
?++-????-++?
??
?
(2-73) 将公式2-73对角线各项总加,我们得到
2
2
2
1vers cos vers cos vers cos 1x y z x y z n o a k k k θθθθθθ+++=++++++ (2-74) 2
2
2
()vers 3cos 12cos x y z x y z n o a k k k θθθ++=+++=+ (2-75)
旋转角的余弦是
1cos (1)2
x y z n o a θ=
++- (2-76)
将公式2-73对角线两边的各对称项相减,我们得到
2sin z y x a a k θ-= (2-77)
2sin x z y a a k θ-= (2-78) 2sin y x z n o k θ-= (2-79)
将公式2-77~2-79平方相加,我们得到sin θ的表达式
2
2
2
2
()()()4sin z y x z y x o a a n n o θ-+-+-= (2.80)
旋转的正弦是
sin θ=±
(2-81)
我们规定绕向量k 的转动是正的,因而0180θ≤≤
,在这种情况中,公式2-81应取+号,且由此旋转角θ可唯一地确定为
tan (1)
x y z n o a θ=
++- (2-82)
k 的分量可以从公式2-77~2-79中得到
2sin z y x o a k θ-=
(2-83) 2sin x z
y a n k θ
-=
(2-84)
2sin y x
z n o k θ
-=
(2-85)
当旋转角非常小时,由于公式2-83~2-85中分子和分母两者的值小,旋转轴不能确切地定
出。如果得到的角很小,向量k 应当再标准化,以保证1=k 。当旋转角接近180
时,因
为正弦的值同样变得很小,向量k 也不能用公式2-83~2-85来很好确定[Klump]。但是在这种情况中,转动轴实际上是意义明确的。当150θ>
时,公式2-83~2-85的分母小于1。当
角度增加至180 时,分母和分子的值迅速减少,导致在确定k 时,存在相当大误差。在
180θ=
时,公式2-83~2-85出现了00的形式,从而对实际上意义明确的向量k 得不到
任何信息。如果转动角大于90 ,则 在确定k 时我们必须遵守另一不同的方法。由公式2-73的对角线元素相等,我们得到
2
vers cos x x k n θθ+= (2-86)
2
vers cos y y k o θθ+= (2-87)
2
vers cos z z k a θθ+= (2-88)
将cos θ和vers θ用公式2-76代入,并对k 的元素求解,我们进一步得到
x k = (2-89)
y k = (2-90)
z k = (2-91)
由公式2-89~2-91所定出k 的最大分量系与,x y n o 和z a 中的最大正值相对应。对于这一最大元素,其根的符号可以从公式2-77~2-79得到。因为旋转角θ正弦的符号必须是正的,故由公式2-77~2-79所定k 的分量符号,必须与这些公式左边的符号相同。于是我们可以将公式2-89~2-91与包含在公式2-77~2-79中的信息结合如下
sgn(x z y k o a =- (2-92)
sgn(y x z k a n =- (2-93)
sgn(z y x k n o =- (2-94)
式中,如果0e ≥,sgn()1e =±,如果0e ≤,sgn()1e =-。
仅有k 的最大元素是由相应于,x y n o 和z a 中的最大正值,用公式2-92~2-94来确定。其余元素则由公式2-73中对角线两边相对称的元素相加所形成的下列公式来更精确地确定。
2vers y x x y n o k k θ+= (2-95)
2vers z y y z o a k k θ+= (2-96)
2vers z x z x n a k k θ+= (2-97)
如果x k 最大,则
由公式2-95得 2v e r s
y x y x n o k k θ+= (2-98) 由公式2-97得 2v e r s
x z z x a n k k θ+= (2-99)
如果y k 最大,则
由公式2-95得 2v e r s y x x y n o k k θ+=
(2-100)
由公式2-96得 2v e r s
z y z y o a k k θ+= (2-101)
如果z k 最大,则
由公式2-97得 2v e r s x z x z a n k k θ+=
(2-102)
由公式2-96得 2v e r s
z y y z o a k k θ+=
(2-103)
(对这一问题的另一处理方法见[Whitney]) 例2.1
确定在公式2-41中给出的矩阵的等效旋转轴和等效旋转角。
0101000
(,90)(,90)01000
1y z ??????=??????
R ot R ot (2-104) 我们首先由公式2-76确定cos θ
11cos (0001)2
2
θ=
++-=-
(2-105)
在由公式2-81确定sin θ
sin 2
θ=
=
(2-106)
于是
1
tan 120θ-==
(2-107)
因为θ>90
,我们确定相应于对角线中最大元素的最k 大分量。因为在这一例中所有对角线元素均相等,我们可以任取一个。我们将取由公式2-92给出的x k
x k == (2-108)
因为我们已经确定了x k ,现在我们可以分别用公式2-98和2-99确定y k 和z k
y k =
= (2-109)
z k =
= (2-110)
概括起来,则
(,90)(,90)(,120)y z =Rot Rot Rot k (2-111)
式中
=
+
+
k j (见图2-12) (2-112)
任何一组复合转动,总是等效于绕某一k 轴旋转的单一转动,我们将在后面应用这一重要结果。
2.14 伸展和缩放
虽然我们在操作中将不使用这些变形的变换,这里将它们包括进来,则是为了变换主题更为完整。
一变换T
000000
0000
1a
b c ?????
?=??????
T (2-113) 表示沿x 轴用因子a ,沿y 轴用因子b ,沿z 轴用因子c 均匀地伸展物体。对物体上任一点x y z ++i j k ,它的变换是
000000000100011ax a x by b y cz c z ??????????????????=??????????????????
(2-114) 此式说明了上述的伸展。于是用这样的变换,能够使立方体变成长方体。
下一变换S 将通过因子s 缩放任一物体
000000
0000
1s s s ?????
?=??????
S (2-115) 2.15 透视变换
考虑如图2-13所示物体用简单透镜形成的影像。
为了叙述方便,透镜的轴线沿y 轴给出,如果透镜的焦距为f (f 被视为正值),物体上的x y z ,,点成像在x y z '''、、上,y '表示成像的距离,并随着物体的距离y 而变化。如果我们将各点绘在垂直于y 轴且距离为y '的平面上(摄影机的胶片平面),则形成了透视影像。
我们将首先求出x y ''、和z '的值,然后引入透视变换,并表明由此可以得到相同的值。
基于射线穿过透视中心不偏斜的事实,我们可以写出
z z y y '
=
' (2-116) 和
x x y y '='
(2-117)
再基于平行于透镜轴的射线穿过焦点f 的事实,我们可以写出
z z f y f '='+ (2-118) 和
x x f y f
'=
'+ (2-119)
要注意x y ''、和z '是负值而f 是正值。消去公式2-116和2-118中的y ',我们得到
(
)
z z z y f f z '='+ (2-120)
y
对z '求解,得到结果
(1)
z z y f '=
-
(2-121)
通过公式2-117和2-119的运算,可以类似地得到
(1)
x x y f '=
-
(2-122)
为了得到成像距离y ',我们将公式2-116和2-118改写为
z y z y ='' (2-123)
和
z f z y f =''+ (2-124)
于是
y f y y f
='
'+ (2-125)
对y '求解我们得到结果
(1)
f y y f '=-
(2-126)
产生同一结果的齐次变换P 是
100001000
010100
1f
??
????
=??????-???
?
P (2-127) 对任一点x y z ++i j k 其变换为
1
000010000101100
11x
x y y
z z y f f
????
???
??
?????????=???????
?????????--???????
??
?
(2-128) 通过除以全因子(1)y f -得到的像点x y z '''、、为
1.矩阵和线性变换: 线性变换的定义: 线性映射(linear mapping)是从一个 向量空间V到另一个向量空间W的映射 且保持加法运算和数量乘法运算,而线性 变换(linear transformation)是线性空间V 到其自身的线性映射。 一个矩阵对应了一个线性变换这个说法, 就可以知道这个说法并不严谨。(基) 矩阵是对线性变换的表示;确定了定义域空间与目标空间的两组基,就可以很自然地得到该线性变换的矩阵表示。 两个矩阵相乘,表示了三个线性空间的变换。要想从第一个空间转换到第三个空间,则第一个变换的定义域空间U到目标空间 V1,第二个变换的定义域空间V2到目标 空间W,必须满足V1和V2是一个空间。 矩阵把v'i换成vi的换基矩阵与把vi 换成v'i的换基矩阵这两个矩阵是互逆的.
2恒等变换与伸缩变换 3矩阵对角化 条件: n个线性无关的特征向量;每个特征值的线性无关的特征向量的个数恰好等于该特征值的代数重数;充分条件n个特征值互不相等(充分条件); 代数重数:特征多项式的次数;几何重数:与某一个特征值λ相关联的线性无关的特征向量的最大个数。 所以对角化其实就是要用特征向量组成的基来代替标准基,描述线性变换,使得多个耦合的变量尽可能的解耦。 如果A为实对称阵,则其必可以正交相似对角化。其中U内的每个向量互相正交。即:u1.T=u1.I. 线性变换: 可以发现里面并不涉及矩阵维度的变化。其中中间的对角矩阵相当于对矩阵的每一列(t 特征向量)进行拉伸。两边的同维方阵使用的是同一组基,即上述的线性变换始终在一组基
里面,所以相当于在同一空间内做旋转。在一个n维空间里,标准正交基是唯一存在的,该n维空间里面所有的向量都可由该组正交基线性变换得到。 所以矩阵的对角化涉及到的运动包括:旋转和缩放。 A矩阵将一个向量从x这组基的空间旋转到x这组基的空间,并在每个方向进行了缩放。 4.SVD 证明:AA.T的特征向量组就是P矩阵: 2 ∑∑∑∑∑ T T T T T T T =?=?== A P V A V P AA P V V P P P 得证对A进行矩阵分解得到的P矩阵就是AA.T的特征向量组成的P矩阵。 SVD的一些应用 1.降维 左奇用于行数的压缩。右奇异矩阵可以用于列数即特征维度的压缩,也就是我们的PCA降维。 2.PCA使用SVD求解 PCA求解过程中的协方差矩阵为特征之间(列之间)的关系矩阵(m*m)。而SVD的右奇异矩阵也是关于特征之间(矩阵列之间)的关系,所以PCA里面的协方差矩阵可以通过SVD得到。 SVD有个好处,有一些SVD的实现算法可以不求先求出协方差矩阵,也能求出我们的右奇异矩阵。 3.奇异(乱入的) 若n阶方阵A的行列式不为零,即|A|≠0,则称A为非奇异矩阵或满秩矩阵 4.几何意义: 奇异值分解把线性变换清晰地分解为旋转、缩放、投影这三种基本线性变换。 其中,P为m*m矩阵,Q为n*n矩阵。 =∑。A矩阵的作用是将一个向量从Q 这组正交基向量的其中涉及的变换:AQ P 空间旋转到P这组正交基向量空间,并对每个方向进行了一定的缩放,缩放因子就是各个奇异值。如果Q维度比P大,则表示还进行了投影。
工业机器人常用坐标系介绍 坐标系:为确定机器人的位置和姿态而在机器人或空间上进行的位置指标 系统。 坐标系包含:1、基坐标系(Base Coordinate System) 2、大地坐标系(World Coordinate System) 3、工具坐标系(Tool Coordinate System) 4、工件坐标系(Work Object Coordinate System) 1、工具坐标系机器人工具座标系是由工具中心点TCP 与座标方位组成。 机器人联动运行时,TCP 是必需的。 1) Reorient 重定位运动(姿态运动)机器人TCP 位置不变,机器人工具沿座标轴转动,改变姿态。 2) Linear 线性运动机器人工具姿态不变,机器人TCP 沿座标轴线性移动。机器人程序支持多个TCP,可以根据当前工作状态进行变换。 机器人工具被更换,重新定义TCP 后,可以不更改程序,直接运行。 1.1.定义工具坐标系的方法:1、N(N=4)点法/TCP 法-机器人TCP 通过N 种不同姿态同某定点相碰,得出多组解,通过计算得出当前TCP 与机器人手腕中心点( tool0 ) 相应位置,座标系方向与tool0 一致。 2、TCPZ 法-在N 点法基础上,Z 点与定点连线为座标系Z 方向。 3、TCPX,Z 法-在N 点法基础上,X 点与定点连线为座标系X 方向,Z 点与定点连线为座标系Z 方向。 2. 工件坐标系机器人工件座标系是由工件原点与座标方位组成。 机器人程序支持多个Wobj,可以根据当前工作状态进行变换。 外部夹具被更换,重新定义Wobj 后,可以不更改程序,直接运行。
在学习数据挖掘的时候,我们一定要掌握一些数学基础,毕竟数据挖掘中涉及到了很多的算法。说到这里我们要给大家说一说数据挖掘的概念,数据挖掘就是从大量数据中获取隐含的、潜在的是有价值信息的过程,数据挖掘也是这些年计算机领域主要的研究内容。那么数据挖 掘需要什么数学基础呢?下面我们就为大家讲解一下这些知识。 首先给大家说一下数据挖掘的基本流程吧,数据挖掘的基本流程就是对原始数据进行填补遗漏、消除异常、噪声等处理,提高数据挖掘的有效性和准确性。然后使用特定的算法对原始 数据进行归纳抽象,去掉肮脏数据,最终得到一个关系模型。当新的数据加入数据集中时, 可以根据该关系模型决定新数据的分类和处理模式。同时,新数据也将带来对整体模型的变化,数据和模型处于动态对应的状态。看到这里,我们不难发现,数据挖掘就是一个典型的 数据建模的过程,这就需要我们使用一些工具、方法、理论知识来进行解决这些问题。 一般来说,数据挖掘需要的数据基础有很多,比如统计机器学习所需要的主要理论和技术:泛 函分析、覆盖数、描述长度理论与算法复杂度研究、与测度论、统计理论、VC维理论、非 线性规划技术、几何变换等等,下面我们就给大家说一下数据挖掘涉及到的数学基础。 我们先要给大家说的就是线性代数和统计学,在数据挖掘过程中,我们少不了建模,而在这 个建模过程中,我们需要掌握两个基础的数据学科,这两大数学学科就是线性代数和统计学。这两门学科代表了机器学习中最主流的两大类方法的基础。第一种是以研究函数和变换为重
点的代数方法,而另一种是以研究统计模型和样本分布为重点的统计方法。这两个学科侧重 虽有不同,但是常常是共同使用的,对于代数方法,往往需要统计上的解释,对于统计模型,其具体计算则需要代数的帮助。以代数和统计为出发点,继续学习的话,就很容易会发现需 要更多的数学。而这些数学基础都是我们需要掌握的知识。 在这篇文章中我们给大家讲述了数据挖掘的知识以及数据挖掘需要的数学基础。如果想要走 进数据分析行业的话,还是需要了解这些知识的,由于篇幅原因我们就给大家讲到这里了, 在下一篇文章中我们继续给大家讲述更多有用的知识。
第3章机器人学的数学基础 在机器人操作手工作时,我们需要在其特定三维工作空间中掌握各个物体之间的几何关系,这些物体包括操作手组成自身的各个活动杆件、底座、末端执行器、抓持工具、待抓取物体、障碍物等,它们之间的三维空间几何关系可用两个非常重要的特性来描述:位置和姿态。 3.1 位置和姿态表示 为了精确描述各个连杆或物体之间的位置和姿态关系,我们首先定义一个固定的坐标系,并以它作为参考坐标系,所有静止或运动的物体就可以统一在同一个参考坐标系中进行比较。该坐标系统通常被称为世界坐标系。基于此共同的坐标系描述机器人自身及其周围物体,是机器人在三维空间中工作的基础。通常,我们对每个物体或连杆都定义一个本体坐标系,又称局部坐标系,每个物体与附着在该物体上本体坐标系是相对静止的,即其相对位置和姿态是固定的。 因此,每个物体之间位置和姿态的关系就可以用它们自身的本体坐标系之间的位姿关系来确定了,本体坐标系原点之间的关系代表了它们的位置关系,本体坐标系各个坐标轴方向之间的关系代表了方位关系。图3-1表示了机器人手臂及其周围物体在世界坐标系∑w中及各自本体坐标系中的位置和姿态。 z y x z ∑W y z x x zzzzzz x y y x p z z y \ 图 3-1 机器人手臂及其周围物体的位置和姿态 3.1.1 位置描述
建立坐标系之后,三维空间中的任何一点都可以用一个具有三个分量的位置矢量来进行定位。例如, 图3-1中立方体的质心p 在世界坐标系中的表示是: ????? ?????=wz wy wx w p p p p 下标w 代表了世界坐标系,因为位置矢量p 在不同坐标系中数值表示不同。以上就是典型的基于笛卡尔坐标系的三维空间位置矢量的描述方法。当采用不同的坐标系表示时,会有不同的位置描述方法。例如 基于圆柱坐标系的空间矢量表示方法,基于球坐标系的空间矢量表示方法等。 3.1.2 方位描述 机器人手臂工作时,不但要考虑所抓取的物体的质心的位置,还要考虑空间中该物体的姿态,既方位。空间中的物体,不但要考虑它的位置,还要考虑它的方位。空间物体通常用自身本体坐标系的坐标原点表示位置,坐标轴的方向代表方位。物体的相对位置和方位通常用它们各自的本体坐标系之间的关系来表示。相对位置关系用局部坐标系的坐标原点之间的关系表示,方位关系用各自本体坐标系的坐标轴单位方向矢量之间的关系来表示。常用的方位描述包括旋转矩阵表示法,固定角表示法,欧拉角表示法,等效轴角表示法,欧拉参数表示法等。我们主要介绍旋转矩阵方位描述法,并简介固定角表示法,其它方法参考教科书。 A. 旋转矩阵描述法 一个本体坐标系{B}相对于另一个参考坐标系{A}的姿态描述,用这个本体坐标系{B}的三个坐标轴的单位方向向量分别在参考坐标系的{A}三个坐标轴上的投影值,共9个投影分量所组成的矩阵(称作旋转矩阵)来表示两个坐标系之间的方位关系,这种方位描述方法称作旋转矩阵方位描述法。具体解释如下: B Z A z B Y {A} {B} A Y A X B X
第六章模糊数学基础6.1概述 6.1.1传统数学与模糊数学 6.1.2不相容原理 6.2 模糊集合与隶属度函数 6.2.1 模糊集合及其运算 6.2.2 隶属度函数 6.3 模糊逻辑与模糊推理 6.3.1模糊逻辑 6.3.2模糊语言 6.3.3 模糊推理
第六章 模糊数学基础 6.1 概述 6.1.1 传统数学与模糊数学 6.1.2 不相容原理 1965年,美国自动化控制专家扎德(L. A. Zadeh )教授首先提出用隶属度函数 (membership function)来描述模糊概念,创立了模糊集合论,为模糊数学奠定了基础。 不相容原理:“随着系统复杂性的增加,我们对其特性作出精确而有意义的描述的能力会随之降低,直到达到一个阈值,一旦超过它,精确和有意义二者将会相互排斥”。这就是说,事物越复杂,人们对它的认识也就越模糊,也就越需要模糊数学。不相容原理深刻的阐明了模糊数学产生和发展的必然性,也为三十多年来模糊数学的发展历史所证实。 6.2 模糊集合与隶属度函数 6.2.1 模糊集合及其运算 一、模糊集合(Fuzzy Sets )的定义 传统集合中的元素是有精确特性的对象,称之为普通集合。例如,“8到12之间的实数”是一个精确集合C ,C ={实数r |8≤r ≤12},用特征函数μC (r )表示其成员,如图6.1(a)所示。 ??? ? ?≤≤=其它 , , 012 81)(r r C μ 在模糊论域上的元素符合程度不是绝对的0或1,而是介于0和1之间的一个实数。例如,“接近10的实数”是一个模糊集合F ={r |接近10的实数},用“隶属度(Membership)” μF (r )作为特征函数来描述元素属于集合的程度。 1 812 1 107.2911 0.750.275 12.8 r r μC (r ) μF (r ) (a) (b) 图6.1 普通集合与模糊集合的对比
授课章节 工业机器人运动学的数学基础 授课形式 讲授 授课时间 第 周 周 ( 月 日) 第 至 节 教学目标 知识目标:了解空间点、向量、坐标系及刚体的表示。 能力目标:能用数学模型表示空间点、向量、坐标系及刚体。 素质目标:提高自学意识 教学重点 空间点、向量、坐标系及刚体的表示 教学难点 空间点、向量、坐标系及刚体的数学模型 教 学 过 程 方法手段 时间分配 导入 为了描述机器人末端执行器位置和姿态与关节变量空间之间的关系,通常需要以数学形式来对机器人的运动进行分析研究,其中矩阵常用来表示空间点、 空间向量、坐标系平移、旋转以及变换,还可以表示 坐标系中的物体和其他运动元件。 3分钟 介绍 重点讲解及任务分析 一、 空间点的表示 如图所示,空间点P 在空间中的位置,可以用它的相对于参考坐标系的三个坐标来表示: x y z P a i b j c k =++ 二、空间向量的表示 向量可以由三个起始和终止的坐标来表示。如果一个向量起始于点A ,终止于点B ,那么它可以表示为()()()AB x x y y z z P B A i B A j B A k =-+-+-。特殊情况下,如果一个向量起始于原点(如图4-1-2所示),则有: x y z P a i b j c k =++ 42分钟(视频、PPT 、动 画)
三、坐标系的表示 一个中心位于参考坐标系原点的坐标系由三个向量表示,通常 着三个向量相互垂直。 四、刚体的表示 在外力作用下,物体的形状和大小(尺寸)保持不变,而且内部各部分相对位置保持恒定(没有形变),这种理想物理模 型称之为刚体。增加刚体的定义: 体上任意两点的连线在平动中是平行且相等的。 刚体上任意质元的位置矢量不同,相差一恒矢量,但各质元的位移、速度和加速度却相同。因此,常用“刚体的质心” 来研究刚体的平动。 一个物体在空间的表示可以这样实现:通过在它上面固连一个坐标系,再将该固连的坐标系在空间表示出来。由于这个 坐标系一直固连在该物体上,所以该物体相对于坐标系的位姿 是已知的。因此,只要这个坐标系可以在空间表示出来,那么 这个物体相对于固定坐标系的位姿也就已知了 练 习 作 业
东北大学 研究生考试试卷 考试科目:数学模型 课程编号: 阅卷人: 考试日期:2012.12 姓名:数学模型 学号: 注意事项 1.考前研究生将上述项目填写清楚 2.字迹要清楚,保持卷面清洁 3.交卷时请将本试卷和题签一起上交 东北大学研究生院
数学模型在机器人技术中的应用 1 绪论 数学模型是根据对研究对象所观察到的现象及实践经验,归结成的一套反映其内部因素数量关系的数学公式、逻辑准则和具体算法,用来描述和研究客观现象的运动规律的算法模型. 数学模型的历史可以追溯到人类开始使用数字的时代. 随着人类使用数字,就不断地建立各种数学模型,以解决各种各样的实际问题. 数学模型的应用几乎渗透到我们生活的各个方面. 随着计算机技术的迅速发展,数学的应用不仅在工程技术、自然科学等领域发挥着越来越重要的作用,而且以空前的广度和深度向经济、金融、生物、医学、环境、地质人口、交通等新的领域渗透. 不论是用数学方法在科技和生产领域解决哪类实际问题,还是与其他学科相结合形成交叉学科,首要的和关键的一步是建立研究对象的数学模型并加以计算求解. 建立数学模型是沟通摆在面前的实际问题与数学工具之间联系的一座必不可少的桥梁. 人们常常把数学建模和计算机技术在知识经济时代的作用比喻为如虎添翼.数学模型同样在机器人技术领域取得了令人瞩目的不凡成就. 机器人是自动执行工作的机器装置. 它既可以接受人类智慧,又可以运行预先编排的程序,又可以根据以人工智能技术制定的原则纲领行动. 它的任务是协助或取代人类的工作,例如生产业、建筑业或者是危险的工作. 机器人技术是为社会经济发展产生了一个重大影响的一门科学技术,机器人技术的发展是生产力发展需求的必然结果,也是人类自身发展的必然结果. 机器人的设计生产同样离不开对数学模型的应用,数学模型的应用在机器人技术领域产生了深远和重大的影响.
机器学习方法有哪些 数学基础 有无数激情满满大步向前,誓要在机器学习领域有一番作为的同学,在看到公式的一刻突然就觉得自己狗带了。是啊,机器学习之 所以相对于其他开发工作,更有门槛的根本原因就是数学。每一个 算法,要在训练集上最大程度拟合同时又保证泛化能力,需要不断 分析结果和数据,调优参数,这需要我们对数据分布和模型底层的 数学原理有一定的理解。所幸的是如果只是想合理应用机器学习, 而不是做相关方向高精尖的research,需要的数学知识啃一啃还是 基本能理解下来的。至于更高深的部分,恩,博主非常愿意承认自 己是『数学渣』。 基本所有常见机器学习算法需要的数学基础,都集中在微积分、线性代数和概率与统计当中。下面我们先过一过知识重点,文章的 后部分会介绍一些帮助学习和巩固这些知识的资料。 微积分 微分的计算及其几何、物理含义,是机器学习中大多数算法的求解过程的核心。比如算法中运用到梯度下降法、牛顿法等。如果对 其几何意义有充分的理解,就能理解“梯度下降是用平面来逼近局部,牛顿法是用曲面逼近局部”,能够更好地理解运用这样的方法。 凸优化和条件最优化的相关知识在算法中的应用随处可见,如果能有系统的学习将使得你对算法的认识达到一个新高度。 线性代数 大多数机器学习的算法要应用起来,依赖于高效的计算,这种场景下,程序员GG们习惯的多层for循环通常就行不通了,而大多数 的循环操作可转化成矩阵之间的乘法运算,这就和线性代数有莫大 的关系了
向量的内积运算更是随处可见。 矩阵乘法与分解在机器学习的主成分分析(PCA)和奇异值分解(SVD)等部分呈现刷屏状地出现。 概率与统计 从广义来说,机器学习在做的很多事情,和统计层面数据分析和发掘隐藏的模式,是非常类似的。 极大似然思想、贝叶斯模型是理论基础,朴素贝叶斯 (Na?veBayes)、语言模型(N-gram)、隐马尔科夫(HMM)、隐变量混合 概率模型是他们的高级形态。 常见分布如高斯分布是混合高斯模型(GMM)等的基础。 典型算法 绝大多数问题用典型机器学习的算法都能解决,粗略地列举一下这些方法如下: 处理分类问题的常用算法包括:逻辑回归(工业界最常用),支持向量机,随机森林,朴素贝叶斯(NLP中常用),深度神经网络(视频、图片、语音等多媒体数据中使用)。 处理回归问题的常用算法包括:线性回归,普通最小二乘回归(OrdinaryLeastSquaresRegression),逐步回归(StepwiseRegression),多元自适应回归样条(MultivariateAdaptiveRegressionSplines) 处理聚类问题的常用算法包括:K均值(K-means),基于密度聚类,LDA等等。 降维的常用算法包括:主成分分析(PCA),奇异值分解(SVD)等。 模型融合(modelensemble)和提升(boosting)的算法包括:bagging,adaboost,GBDT,GBRT 其他很重要的算法包括:EM算法等等。
《机器人基础》教学大纲A 1 课程的基本描述 课程名称:机器人基础The Basic of Robot Technology 课程编号:0102E07W 课程性质:专业方向课适用专业:机械电子工程、机械设计制造及其自动化教材选用:机器人技术基础,柳洪义编著,冶金工业出版社,2002 总学时:30 理论学时:24 实验学时: 6 课程设计:无 学分: 2 开课学期:7 前导课程:高等数学、电工技术、电子技术、C语言程序设计、工程测试与信息处理、计算机控制技术 后续课程:计算机集成制造技术 2 教学定位 2.1 能力培养目标 《机器人基础》是机械、控制、电气和电子工程、计算机科学等领域相互交叉渗透的一门学科。主要内容包括:机器人相关主要部件及子系统简介;物体空间位置的表示;机器人的运动学正、逆解;机器人及作业的静力学分析及力控制技术;机器人作业路径规划及驱动控制系统的规划设计等。 本课程的教学目的是使学生对机器人技术有一个明确的概念。掌握机器人运动学、静力学、动力学计算及运动规划设计方法,对工业机器人的机械结构及驱动系统的运动控制设计有一般性的了解。了解机器人传感器、机器人控制、机器人编程、机器人的应用等,建立机器人系统的完整概念。 本课程注重理论联系实际,在讲清基本概念的同时,以适当的机器人系统实例,结合在工程应用中的实际,通过学生自己动手编制程序、操作和实验,掌握必要的知识,为学生将来运用机器人技术的理论和知识解决工程实际问题打下坚实的基础。 2.2 课程的主要特点 本课程是机械设计制造及其自动化专业的选修课。机器人技术融合了机械、电子技术、计算机及控制技术等多门学科,但由于教学对象是机械设计制造及自动化专业的学生,学时较少,教学内容的取舍上应尽可能结合机电控制的特点。
机器学习的数学体系和相关书籍 最近被一篇JMLR的论文折磨得欲仙欲死,想想还是数学没学好,翻出以前看过的一个博客,希望对想做机器学习的有点帮助。 特别是我们系的新生,你们刚入学某系老师肯定会告诉你统计现在多么牛逼,多么交叉学科,应用广泛。 但是他们什么都不懂,除了告诉你几个八十年代的名词和一些误人子弟的“心得”。 这篇博客主要写了机器学习的数学体系,统计里面很多,如Bayesian,statistical learning之类的都没涉及,还有一些computational concern,approximation以及optimization 之类的都没涉及,有空写一写。From: https://www.doczj.com/doc/1b14496556.html,/default.aspx 1. 线性代数(Linear Algebra):我想国内的大学生都会学过这门课程,但是,未必每一位老师都能贯彻它的精要。这门学科对于Learning是必备的基础,对它的透彻掌握是必不可少的。我在科大一年级的时候就学习了这门课,后来到了香港后,又重新把线性代数读了一遍,所读的是Introduction to Linear Algebra (3rd Ed.) by Gilbert Strang. 这本书是MIT的线性代数课使用的教材,也是被很多其它大学选用的经典教材。它的难度适中,讲解清晰,重要的是对许多核心的概念讨论
得比较透彻。我个人觉得,学习线性代数,最重要的不是去熟练矩阵运算和解方程的方法——这些在实际工作中MATLAB可以代劳,关键的是要深入理解几个基础而又重要的概念:子空间(Subspace),正交(Orthogonality),特征值和特征向量(Eigenvalues and eigenvectors),和线性变换(Linear transform)。从我的角度看来,一本线代教科书的质量,就在于它能否给这些根本概念以足够的重视,能否把它们的联系讲清楚。Strang的这本书在这方面是做得很好的。而且,这本书有个得天独厚的优势。书的作者长期在MIT讲授线性代数课(18.06),课程的video在MIT的Open courseware网站上有提供。有时间的朋友可以一边看着名师授课的录像,一边对照课本学习或者复习。 https://www.doczj.com/doc/1b14496556.html,/OcwWeb/Mathematics/18-06Spring-200 5/CourseHome/index.htm 2. 概率和统计(Probability and Statistics): 概率论和统计的入门教科书很多,我目前也没有特别的推荐。我在这里想介绍的是一本关于多元统计的基础教科书:Applied Multivariate Statistical Analysis (5th Ed.) by Richard A. Johnson and Dean W. Wichern 这本书是我在刚接触向量统计的时候用于学习的,我在香港时做研究的基础就是从此打下了。实验室的一些同学也借用这本书学习向量统计。这本书没有特别追求数学上的深度,而是以通俗易懂的方式讲述主要的基本概念,读起来很舒服,内容也很
数学基础 许多概念与表达式涉及到几何矢量及其运算。矢量的代数描述及其运算将利用矩阵这个工具。在许多科技著作中并不区分矢量与矩阵的概念。然而,在理论力学中这两种数学量必须加以区分。为此本章简要介绍本课程将要涉及到的有关内容,涉及 (1)几何矢量及其导数,相应的运算; (2)矢量及其导数代数描述,它们的矩阵表达,相应的运算。 本章内容及学习要求: 1.1 矩阵 1.1.1 矩阵的定义与运算 (1)矩阵的基本概念 矩阵(列阵)的定义, 矩阵的转置,矩阵用列阵分块表示。 方阵,单位阵,对称阵与反对称阵。 如果对于n阶方阵A,其元素满足A ij=A ji (i, j = 1, , n),即有 则称方阵A为对称阵。
如果A ij=-A ji (i, j = 1, …, n),即有 (1.1-4)则称方阵A为反对称阵。显然,对于反对称阵,有 (i=1, …, n)(1.1-5)例如,在如下的方阵中 ,, 方阵A与C为对称阵,B为反对称阵。此外,C也为三阶单位阵,可表为I3。 (2)矩阵的基本运算 两矩阵相等,矩阵与矩阵的相加(减),标量与矩阵的乘积;矩阵与矩阵的乘积。 (3)矩阵运算的性质 矩阵运算的结合律与交换律 (4)矩阵的可逆运算 满秩方阵(非奇异阵)与逆矩阵,正交阵,一些有用的公式 满秩方阵(非奇异阵)与逆矩阵 对于方阵A,如果存在一个同阶的方阵B,两方阵的积为单位阵,即有 则称方阵A为满秩方阵或非奇异阵。 方阵B为方阵A的逆矩阵,记为A-1。即有 (1.1-19)可以证明以下等式成立 (1.1-20)
(1.1-21)正交阵 满足如下等式的非奇异阵A称为正交阵: (1.1-22)对于正交阵,有 (1.1-23)例如,矩阵 , 互为逆矩阵,因为。考虑到,故它们又是互为正交阵。 一些有用的公式 矩阵与单位阵的运算: 矩阵的转置运算: 矩阵的可逆运算: 矩阵的转置与可逆运算: 1.1.2 矩阵的导数 (1)矩阵对时间的导数 矩阵时间导数的定义,矩阵时间导数的基本运算 矩阵时间导数的定义
工业机器人技术专业教学标准 专业名称工业机器人技术专业 专业代码 560309 招生对象普通高中毕业生/中等职业学校毕业生 学制与学历三年 专科 就业面向 本校工业机器人技术专业面向汽车制造业、机械装备制造业、电工电子及其它制造业的从事工业机器人安装、调试与维护、工业机器人销售等工作的人才。 初始岗位:工业机器人销售员、工业机器人维修工、工业机器人机械安装员、工业机器人电气安装员、工业机器人机械调试员、工业机器人电气调试员。 发展岗位:工业机器人编程工程师、工业机器人机械安装工程师、工业机器人电气安装工程师、工业机器人市场营销策划师。 培养目标与规格 一、培养目标 本专业主要面向智能制造装备、汽车、机械加工、食品、新能源等行业,以及工业机器人制造企业、系统集成企业,主要从事自动化成套装备中工业机器人工作站的现场编程、调试维护、人机界面编程、系统集成等生产技术岗位,以及工业机器人销售和售后服务岗位,掌握工业机器人编程操作、维护管理、调试维修等专业知识与技能,具有职业岗位(群)所需的基础知识及专业技能、具有较强综合职业能力,服务于生产一线的高素质技术技能型人才。
二、培养规格 (一)素质结构 1. 思想政治素质 具有科学的世界观、人生观和价值观,践行社会主义荣辱观;具有爱国主义精神:具有责任心和社会责任感;具有法律意识。 2. 文化科技素质 具有合理的知识结构和一定的知识储备;具有不断更新知识和自我完善的能力;具有持续学习和终身学习的能力;具有一定的创新意识、创新精神及创新能力;具有一定的人文和艺术修养:具有良好的人际沟通能力。 3. 专业素质 掌握工业机器人编程操作、维护管理、调试维修等专业知识与技能,具有职业岗位(群)所需的基础知识及专业技能、具有较强综合职业能力;具有一定的数理与逻辑思维;具有一定的工程意识和效益意识。 4. 职业素质 具有良好的职业道德与职业操守;具有较强的组织观念和集体意识。 5. 身心素质 具有健康的体魄和良好的身体素质;拥有较积极的人生态度;具有良好的心理调适能力。 (二)知识结构 1. 工具性知识 工具性知识包括英语、计算机基础等。 2. 人文社会科学知识 人文社会科学知识包括政治学、社会学、法学、经济学、管理学、思想道德、职业道德、沟通与演讲等。 3. 自然科学知识
从今天开始,我将开设一个机器学习数学基础的系列。主要介绍机器学习中经常用到的那些数学知识,方便大家入门。一说起数学,有人会觉得很难。其实在这个系列中,我将会以最直白的语言来向你解释这些数学名词,大家不用担心,即使你是零基础,一样可以看得懂。 ?向量 我们从向量开始说起,什么是向量?它其实就是用括号括起来的一堆数,只不过这些数都是竖着写的。比如: 它们就分别是1维、2维和3维的向量。我们一般用小写粗体来表示向量,如x。如果我们写 它代表什么含义呢?“∈”这个符号读作属于,R表示实数集,而n表示维度。也就是说向量有几个元素,就是几维的向量。整个式子表示:向量x有n个维度,每个元素的取值都在实数集中。 ?范数 范数,又叫做L-p范数。它是这么定义的: 看上去很复杂,其实也容易理解,我们一点点来看。上面的式子是说,对于给定的一个n维向量w,它的范数就是向量w中的各个元素的绝对值的p次方之和,再开p次的根号(1/p 就相当于开p次根号)。根据p的取值不同,范数的结果也就不同。我们常用的p值为12,∞等等。 1. L1范数 我们先来看p值为1时的范数,我们称之为L1范数。把p=1代入上面的式子,得到:
可能上面的式子还不够直观,我们再举个例子来看。假设我们有二维向量w=(x,y),那 么w的L1范数就是|x|+|y|。当范数值固定时,我们还可以画出由所有的点(x,y)构成的图像。这里不妨假设|x|+|y|=1(当然你可以假设为任意值k,这里假设为1只是为了画图方便),我们大概用手画一下它的图像: 图1 那么图像为什么是这样子的呢?我们可以研究下公式|x|+|y|=1,其中x和y的正负性是未知的,我们就可以分情况来讨论: ① x>0,y>0。公式化简为x+y=1,它原本的图像是过图1中A、B两点的直线,但现在约束 条件是x、y均大于0.所以它最后的图像就是AB线段。 ② x>0,y<0。公式化简为x-y=1,它原本的图像是过图1中A、D两点的直线。但现在有了 约束条件,所以它最后的图像就是AD线段。 ③ x<0,y>0。公式化简为-x+y=1,它原本的图像是过图1中B、C两点的直线。但在约束条 件下,它最后的图像为BC线段。 ④ x<0,y<0。公式化简为-x-y=1,它原本的图像是过图1中C、D两点的直线。但在约束条 件下,它最后的图像变成CD线段。 综合以上的4种情况,|x|+|y|=1最后的图像就是由AB、AD、BC、CD一共4条线段构成。 另外,我们也把L1范数称为曼哈顿距离。为什么呢,我们画个图来看下:
第一课课程导言 1.1 导言 大纲 ?涵盖由浅入深的一系列机器学习技术 ?将会学到: o PCA, MDS, K-mean, 基于频谱的聚类方法,贝叶斯分类,boosting, logistic回归,决策树,EM算法,隐马尔可夫模型,卡尔曼滤波…… ?讲述算法、理论、应用背后的故事 ?将会既有趣又辛苦 时间安排 ?03.04 介绍 ?03.11 分类 ?03.18 聚类 ?03.25 隐马尔可夫与卡尔曼滤波 原则 ?简即美 ?在理论性和应用性上达到平衡 先修课程 ?概率论 o分布、密度、边界…… ?统计基础 o矩、经典分布、回归…… ?算法 o动态规划、基本数据结构、复杂度…… ?编程 o C/C++, Java, Matlab…… ?将会提供一些背景知识,但课程步调还是会比较快 ?处理抽象数学概念的能力 参考书 ?Machine Learning
o by Tom Mitchell ?Pattern Classsification (2nd Edition) o by Duda, Hart and Stork ?Information Theory, Inference, and Learning Algorithm o by David MacKay ?Statistical Inference o by George Casella and Roger L. Berger ?Pattern Recogniation and Machine Learning o Christopher M.Bishop ?And more … ?以上均为可选参考书目,每人都会有自己的学习方法 网络资源 ?https://www.doczj.com/doc/1b14496556.html,/home/zhx/csmath/ 享受之! ?机器学习在科学、工作及其它领域正变得无所不在 ?本课程将提供应用机器学习、开发新方法的基础 1.2 机器学习单元概况 Call for editing 1.3 什么是机器学习? 大纲 ?背景 ?什么是机器学习 ?机器学习对于计算机科学和技术有何帮助 当今计算机科学的最大挑战 ?数据,数据,数据…… o需要大量乏味的重复的工作才能创建数字化的世界?需要寻找新的交互方式,创造新类型的媒体
人工数学建模和机器学习的优缺点进行介绍和比较 【导语】本文对传统的人工数学建模和机器学习的优缺点进行了介绍和比较,并介绍了一种将二者优点相结合的方法——解耦表示学习。之后,作者利用DeepMind 发布的基于解耦表示学习的beta-V AE 模型,对医疗和金融领域的两个数据集进行了探索,展示了模型效果,并提供了实验代码。 这篇文章会对传统数学建模与机器学习建模之间的联系进行讨论。传统数学建模是我们在学校里都学过的建模方法,该方法中,数学家们基于专家经验和对现实世界的理解进行建模。而机器学习建模则是另一种完全不同的建模方式,机器学习算法以一种更加隐蔽的方式来描述一些客观事实,尽管人类并不能够完全理解模型的描述过程,但在大多数情况下,机器学习模型要比人类专家构建的数学模型更加精确。当然,在更多应用领域(如医疗、金融、军事等),机器学习算法,尤其是深度学习模型并不能满足我们需要清晰且易于理解的决策。 本文会着重讨论传统数学建模和机器学习建模的优缺点,并介绍一个将两者相结合的方法——解耦表示学习(Disentangled Representation Learning)。 如果想在自己的数据集上尝试使用解耦表示学习的方法,可以参考Github 上关于解耦学习的分享,以及Google Research 提供的关于解耦学习的项目代码。 深度学习存在的问题 由于深度学习技术的发展,我们在许多领域都对神经网络的应用进行了尝试。在一些重要的领域,使用神经网络确实是合理的,并且获得了较好的应用效果,包括计算机视觉、自然语言处理、语音分析和信号处理等。在上述应用中,深度学习方法都是利用使用线性和非线性转换对复杂的数据进行自动特征抽取,并将特征表示为“向量”(vector),这一过程一般也称为“嵌入”(embedding)。之后,神经网络对这些向量进行运算,并完成相应的分类或回归任务: 从特征提取和准确度来看,这种“嵌入”的方法非常有效,但在许多方面也存在不足:
1. 线性代数 (Linear Algebra): 我想国内的大学生都会学过这门课程,但是,未必每一位老师都能贯彻它的精要。这门学科对于Learning是必备的基础,对它的透彻掌握是必不可少的。我在科大一年级的时候就学习了这门课,后来到了香港后,又重新把线性代数读了一遍,所读的是 Introduction to Linear Algebra (3rd Ed.) by Gilbert Strang. 这本书是MIT的线性代数课使用的教材,也是被很多其它大学选用的经典教材。它的难度适中,讲解清晰,重要的是对许多核心的概念讨论得比较透彻。我个人觉得,学习线性代数,最重要的不是去熟练矩阵运算和解方程的方法——这些在实际工作中MATLAB可以代劳,关键的是要深入理解几个基础而又重要的概念:子空间(Subspace),正交(Orthogonality),特征值和特征向量(Eigenvalues and eigenvectors),和线性变换(Linear transform)。从我的角度看来,一本线代教科书的质量,就在于它能否给这些根本概念以足够的重视,能否把它们的联系讲清楚。Strang的这本书在这方面是做得很好的。 而且,这本书有个得天独厚的优势。书的作者长期在MIT讲授线性代数课(18.06),课程的video在MIT的Open courseware网站上有提供。有时间的朋友可以一边看着名师授课的录像,一边对照课本学习或者复习。 https://www.doczj.com/doc/1b14496556.html,/OcwWeb/Mathematics/18-06Spring-2005/CourseHome/index.htm 2. 概率和统计 (Probability and Statistics): 概率论和统计的入门教科书很多,我目前也没有特别的推荐。我在这里想介绍的是一本关于多元统计的基础教科书: Applied Multivariate Statistical Analysis (5th Ed.) by Richard A. Johnson and Dean W. Wichern 这本书是我在刚接触向量统计的时候用于学习的,我在香港时做研究的基础就是从此打下了。实验室的一些同学也借用这本书学习向量统计。这本书没有特别追求数学上的深度,而是以通俗易懂的方式讲述主要的基本概念,读起来很舒服,内容也很实用。对于Linear regression, factor analysis, principal component analysis (PC A), and canonical component analysis (CCA)这些Learning中的基本方法也展开了初步的论述。 之后就可以进一步深入学习贝叶斯统计和G raphical models。一本理想的书是 Introduction to Graphical Models (draft version). by M. Jordan and C. Bishop. 我不知道这本书是不是已经出版了(不要和Learning in Graphical Models混淆,那是个论文集,不适合初学)。这本书从基本的贝叶斯统计模型出发一直深入到复杂的统计网络的估计和推断,深入浅出,statistical learning的许多重要方面都在此书有清楚论述和详细讲解。MIT内部可以access,至于外面,好像也是有电子版的。 3. 分析 (Analysis):
第二版:统计分析机器学习吐血整理最强指南 这是浩彬老撕自己的学习书单,希望能够帮助大家更好更快地理解数据科学,同时也希望继续完善自己。 #关于这份学习清单#我会按照基础到入门给出详细推荐,并且附上个人点评。同时尽量做到各个资料在内容上并不重复(即使内容上有重复,也会在难度上做出区分),希望可以以最直接的方式告诉大家应该怎么选择。Ps:这是第一版学习指南,由于最近时间比较紧张,预计在第二版中会加入业务材料的推荐和更多的学习索引,欢迎关注。 第一版概述:第一版学习指南,主要是基本的学习框架和学习路径,通过第一版书单,相信大家能够建立统计分析/机器学习的整体理论认知。第二版概述:增加了非统计/CS童鞋的入门书籍,增加了机器学习的外文资料介绍,增加了更多行业实践资料,调整了部分书籍的推荐顺序。预计第三版更新:(1)可视化内容;(2)社交网络分析内容;(3)统计分析/机器学习杂谈读物; 0.非相关专业的简单入门统计分析/机器学习已经不仅仅只是相关专业人士的私藏,现在有更多跨专业的童鞋也希望学习相关知识来提供自身领域的能力,因此这里简单给大家介绍几本简单的入门材料。 0.1 基本《谁说菜鸟不会数据分析》系列豆瓣评分:7.3-7.5
分别是入门篇,工具篇和SPSS篇。该系列书籍是彩印的,同时入门篇提供了数据分析的基本概念和简单的Excel使用技巧,工具篇和SPSS篇提供了对工具的入门掌握,整个系列的好处是直观简单,能够帮助非相关的专业人士快速建立起对基本概念的认知和基本的数据分析思想,硬要说“缺点”则是过于简单,但对于入门同学来说,这个层面刚刚好。 三本书的内容其实在数据分析基本概念这部分都是存在部 分重复,因此可以根据需要先买一本(建议黄色入门篇),如果你还记得多年前学过的基本分析知识,更具现在的工具使用情况可以考虑工具篇(现在的你需要经常Excel,想学习写一份简单的分析报告)或SPSS篇(现在的你,被期望使用一些统计分析方法,有一些稍深入一点的见解)0.2 深入浅出系列统计学,深入浅出数据分析(豆瓣评分8.2,/豆瓣评分7.6)毕竟是基本入门,浩彬老撕认为只选一个系列就足够了。如果你确实想看得更多旁敲侧击,可以看看《深入浅出统计学》,以及《深入浅出数据分析》。相比于《菜鸟》系列,浩彬老撕认为《深入浅出系列》内容稍多,但是行文逻辑相比于《菜鸟》略有发散,个人更建议《菜鸟》系列。 1.先验知识由于统计学概率论甚至到机器学习会对数学基础有一定要求,所以这里给出一些先验知识的内容推荐,主要是矩阵方面。1.1 课程 可汗学院公开课:线性代数课程
人工智能与数学 源起 在20世纪50年代,计算机开始大规模生产并进入商业领域。尽管那时候计算机的运算 能力还十分有限,即便是最强大的计算机与现在的智能手机相比也有天渊之别,但这丝毫没 有影响科学家丰富的想象力。 科学家设想:计算机是不是也可以和人类一样进行推理,具有和人类一样的认知能力? 要知道当时计算机的智力尚不及老鼠的百亿分之一。而提出这个设想的就是天才的科学家图灵,他在1950年提出的"图灵测试"也成为一个关于判断机器是否能够思考的著名试验。 1956年8月,在美国达特茅斯学院,十几位年轻的科学家聚在一起,搞了一个讨论班,参加的人有: 约翰?麦卡锡(John McCarthy), 数学博士; 马文?明斯基(Marvin Minsky), 数学博士、人工智能与认知学专家; 克方德?香农(Claude Shannon ), 信息论的创始人; 艾伦?纽厄尔(Allen Newell), 计算机科学家; 赫伯特?西蒙(Herbert Simon ), 政治学博士; 阿瑟?萨缪尔(Arthur Samuel), IBM的程序员; 与会者在近两个月时间里,讨论一个天马行空的主题:用机器来模仿人类学习以及其他 方面的智能。虽然在会议上大家没有达成普遍的共识,却为会议讨论的内容起了一个响亮的 名字:人工智能(Artificial Intelligence, Al ) 因此,1956年也就成为人工智能元年。 文献中没有留下当时全体与会者的合影,无法确认除了上面几位名传青史的科学家,还 有谁参加了这次“达特茅斯论剑”,就连是谁先提出了“人工智能”这个新词,也无从考证。在与会者之一所罗门诺夫存放会议文档的网站上,有一张会议室窗口朝外拍的照片,这或许 在暗示着什么:当时大家对于人工智能的了解,就如看这窗外的风景,只看到很小的局部, 外面的广阔天空,期待着人们进一步的探索。 演进 人工智能的研究者在“推理机、知识库”的路走不通之后,开始转向概率统计的建模、 学习和计算,建立概率模型,从数据中“找出蛛丝马迹"并从中学习,然后对真实世界中的事 件做出决策和预测。 人工智能和其他技术融合起来,生成了很多“子学科”,例如: 计算机视觉(包括模式识别、图像处理等);