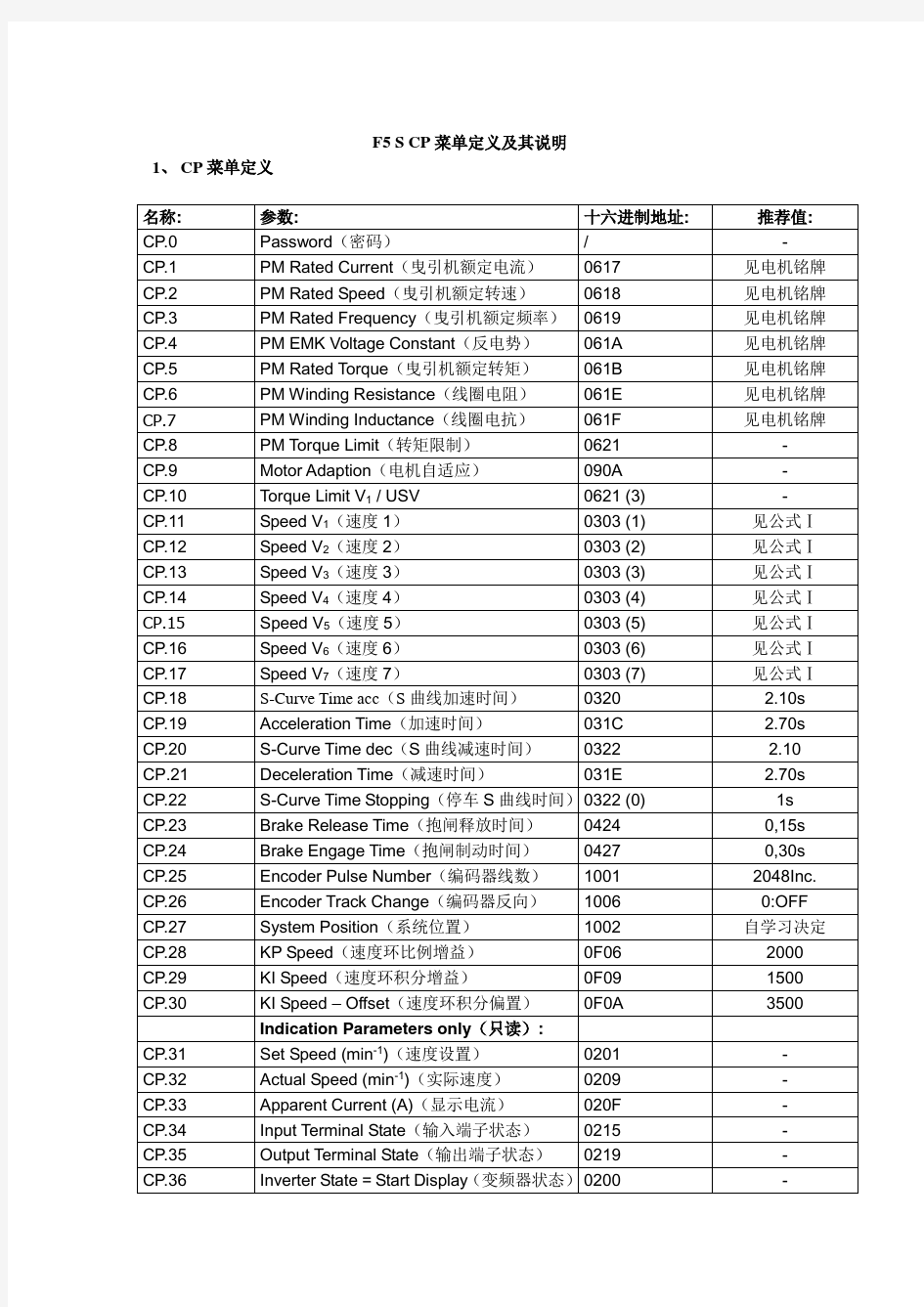
F5 S CP菜单定义及其说明1、CP菜单定义
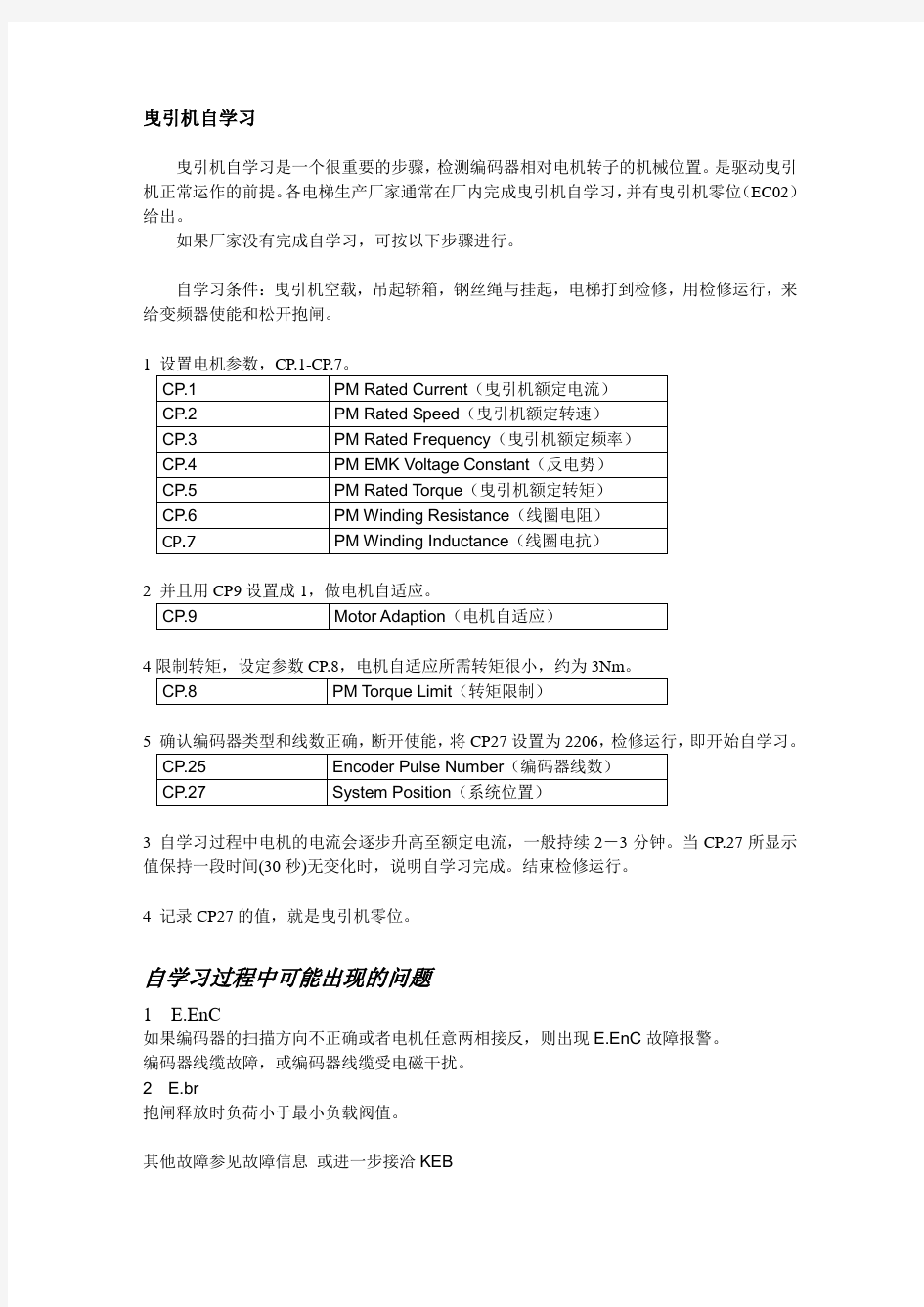
曳引机自学习
曳引机自学习是一个很重要的步骤,检测编码器相对电机转子的机械位置。是驱动曳引机正常运作的前提。各电梯生产厂家通常在厂内完成曳引机自学习,并有曳引机零位(EC02)给出。
如果厂家没有完成自学习,可按以下步骤进行。
自学习条件:曳引机空载,吊起轿箱,钢丝绳与挂起,电梯打到检修,用检修运行,来给变频器使能和松开抱闸。
4
即开始自学习。
3 自学习过程中电机的电流会逐步升高至额定电流,一般持续2-3分钟。当CP.27所显示值保持一段时间(30秒)无变化时,说明自学习完成。结束检修运行。
4 记录CP27的值,就是曳引机零位。
自学习过程中可能出现的问题
1 E.EnC
如果编码器的扫描方向不正确或者电机任意两相接反,则出现E.EnC故障报警。
编码器线缆故障,或编码器线缆受电磁干扰。
2 E.br
抱闸释放时负荷小于最小负载阀值。
其他故障参见故障信息或进一步接洽KEB
与电梯控制系统的时序配合
例:输入X2.10 X2.11,通过二进制编码选择3号速度,变频器CP.13所设置的速度。
付上建议值
CP.28速度环比例增益
KP值过大会导致稳速运行时的抖动。KP值过小则会导致
的给定值和实际值的偏差。在加、减速过程之后会出现振荡过程。
CP.29 速度环积分增益
KI值
CP.30速度环积分偏置
为避免起动时“反拉”现象,抱闸张开时候的倒拉现象,该参数设定以500为单位递增。最大值4095。
KEB软件Combivise自带有强大的内置示波器功能示波器
四通道,高分辨率,从变频器内部采集数据精确高速。如果有示波器观测速度可以通过速度的波形调整KP KI
KP,KI调节方法
问题:过度过程太长
解决方案:加大KP(CP.28); 减小KI(CP.29)
问题:速度超调过大
解决方案:加大KP(CP.28); 减小KI(CP.29)
问题:稳定运行有震荡
解决方案:加大KP(CP.28)
问题:速度超调过大
解决方案:加大KP(CP.28); 减小KI(CP.29)
问题:超润时间过长,动态速度大
解决方案:加大KI CP.29
问题:震荡
解决方案:减小KP(CP.28); 减小KI(CP.29)
调节曲线
●CP.18 电梯急加速而起动时,其强烈程度决定了乘客的舒适感,所以加速度是很重要的
参数。它会导致传动系统承受较大的动态负荷,给机械部件造成冲击。每个人对此的感受是不同的,与他们的年龄,体格,精神状态有关。
经验值: 0.5...0.8 m/s3 适合养老院,医院,公寓0.8...1.2 m/s3 适合办公楼,银行等。
●CP.19 根据舒适感决定。
经验值: 0,5...0,8 m/s2 适用于养老院、医院和住宅。0,8...1,2 m/s2 适用于办公楼、银行等。
●加减速时间参数是加减速1000转的时间,各段相应的时间可按照以下公式计算。
t= CP.19 * △n / 1000 △t= CP.21 * △n / 1000
●加速时间应该大于S型曲线加速时间,减速时间也应该大于S曲线减速时间。
●通过加大CP.21可以缩短爬行距离,CP.21每次增加量不可超过0.05秒,避免冲顶。
调试过程中发现几个问题.
井道自学习中确认多的数据是井道的实际数据而不是电机的数据.
根据编码器反馈脉冲所得的数据是电机数据应该考虑绕法和减速比换算成实际轿箱
的距离和位置
编码器故障问题
首先确认接地编码器线应该双端保证接地良好,防止与电源线并敷对重和平衡系数对调试的影响
当对重侧超出轿箱很多的时候启动