总第201期2011年第3期
舰船电子工程
Ship Electr onic Eng ineering
V o l.31No.3
143
基于嵌入式Linux的以太网卡驱动设计与实现*
龙新辉1)陈俊杰1),2)
(东南大学仪器科学与工程学院1)南京210096)(东南大学常州研究院2)常州213164)
摘要介绍了以S3C2440与DM9000为硬件平台的网络设备驱动的设计和实现方案,重点阐述了网络设备驱动的架构,网络设备驱动程序的初始化,以及如何处理数据的接受,发送等相应事件处理。最后测试证明此网络设备驱动能够很好地实现网络包数据的传输,达到了较快的速度和较高的稳定性。
关键词嵌入式;L inux;网卡驱动;S3C2440;DM9000
中图分类号T P311
Design and I mplementation of Ethernet Driver
Based on Emb edded Linux
L o ng X inhui1)Chen Junjie1),2)
(Schoo l o f Instr ument Science and Eng ineer ing,Southeast U niv ersity1),Nanjing210096)
(Changzhou Academe,Southeast U niversit y2),Chang zhou213164)
A bstract Intro duced the net wo rk dev ice dr iver design and implementatio n based on the S3C2440and the DM9000,fo-cused on the netw or k device dr iver architectur e,and t he netwo rk device dr iv er initializatio n,as w ell as ho w to deal w ith the acceptance and sending of data,and the co rresponding event handling.F inal tested to pro ve the netw ork dev ice dr iver can be a very go od realizat ion of the netwo rk packet data transmission,to achieve a relativ ely r apid speed and hig h stability.
Key Words embedded,Linux,ethernet dr iv er,S3C2440,DM9000
Class Number T P311
1引言
要实现小型嵌入式设备的Internet接入, TCP/IP首先要解决的是底层硬件问题,即协议的物理层。Ethernet具有成熟的技术、低廉的网络产品、丰富的开发工具和技术支持,当现场总线的发展遇到阻碍时,以太网控制网络技术以其明显的优势得到了迅猛的发展,并逐渐形成了现场总线的新标准)Ethernet。考虑到国内局域网大部分是以太网、随着交换式网络、宽带网络的发展,基于以太网的嵌入式设备Inter net接入应用有着现实意义。
在现有嵌入式系统中大多数选用的是10M b/s 的以太网卡,其传输速率慢,已不能再适应现在人们的要求。而其它10/100M b/s网卡芯片或工艺复杂或成本较高,不适应工业制造。而DM9000是完全综合的,成本较低的单一快速以太网控制器芯片,具有通用的处理器接口。它被设计为低功耗、高处理性能,而其设计又非常简单,所以可以容易的完成不同系统的软件驱动开发。
本文阐述了一种基于Linux2.6操作系统平台和S3C2440与DM9000为硬件平台的网络设备驱动的硬软件设计方案。
2S3C2440与DM9000的接口电路2.1DM9000的介绍
DAV ICOM公司的DM9000快速以太网控制
*收稿日期:2010年10月15日,修回日期:2010年11月29日
基金项目:常州市科技攻关计划重点项目(编号:CE20090027);常州市科技攻关计划项目(编号:CE20092010)资助。
作者简介:龙新辉,男,硕士研究生,研究方向:无线传感网络。陈俊杰,男,博士,教授,博士生导师,研究方向:无线传感器网络、普适计算、RFID理论及应用技术等。
144 龙新辉等:基于嵌入式L inux 的以太网卡驱动设计与实现总第201期
处理器,合成了MAC 、PH Y 、MM U 。该处理器配备有标准10M/100M 自适应,16K 大容量的FIFO,4路多功能GPIO,掉电,全双工工作等功能。物理层支持以太网接口协议。由于数据有时是以猝发形式收到的,因此,DM9000还集成有接收缓冲区,以便在接收到数据时能把数据放到这个缓冲区中,然后由数据链路层直接从该缓冲区里取走数据。链路层通常包括操作系统中的设备驱动程序和计算机中对应的网络接口卡,它们一起处理与电缆的物理接口细节数据,它的缓冲区可用来暂时存储要发送或接收的帧。
2.2 S3C2440与DM9000的接口设计
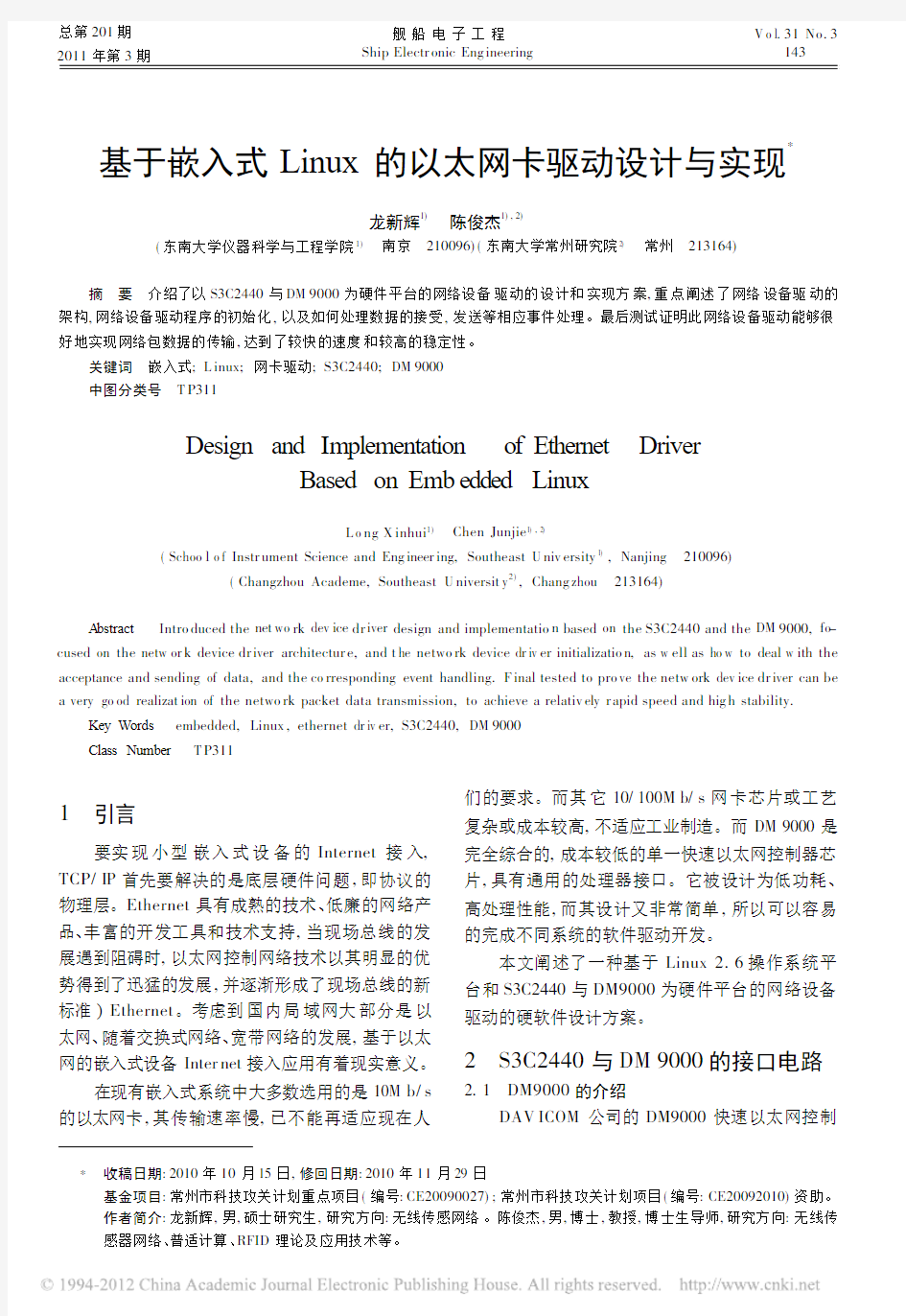
硬件上要完成DM 9000与ARM 芯片S3C2440三大总线连接,以及DM 9000与以太网水晶接头RJ45的连接。基于S3C2440与DM9000的逻辑连接如图1
所示。
图1 基于S3C2440与DM 9000的逻辑连接
具体电路设计时实现DM9000与S3C2440连接,必须对两者间的数据、地址、控制三大总线进行连接和转换。S3C2440是32位微处理器,有32根地址线,支持4GB 存储空间。其中0到40000000的1G 空间被划分为8块128M 空间,分别由NGCS0-NGCS7片选。DM9000为16位以太网控制芯片。对DM 9000读写操作,首先对DM9000正确寻址。AEN (地址允许)是输入引脚片选信号。SA4-SA9是地址总线4到9位,当AEN 低且SA9和SA8高,而SA7,SA6,SA5,SA4为低时,则DM9000被选中。
DM9000默认I/O 基址为300H 。CMD 引脚用于设置COMM AND 模式,CM D 为高时,选择数据端口。CM D 为低时,选地址端口。数据端口和地址端口的地址码由下式决定:
DM9000地址端口=高位片选地址+300H +0H DM9000数据端口=高位片选地址+300H +4H 其中,高位片选地址由S3C2440的N GCS3提供,即为:0x 10000000H.
3 Linux 网卡驱动的软件设计
3.1 Linux 网络设备驱动程序的体系结构
Linux 网络设备驱动程序的体系结构可以划
分为四层,从上到下分别为dev_queue_x mit()ne -tif_r x()网络协议接口层、网络设备接口层,再就是提供实际功能的设备驱动功能层,以及网络设备。Linux 网络设备驱动程序的体系结构如图2
所示。
图2 L inux 网络设备驱动程序的体系结构
str uct device 是一个非常重要的数据结构,这个数据结构是系统中每一个设备的代表,它提供了多个设备方法,供操作系统或协议层调用。这其中就包括设备初始化时调用的init 函数、打开和关闭网络设备的open 和sto p 函数、处理数据包的发送的hard_start_xm it 函数等。
在这个数据结构体里面,主要成员变量是init
函数指针,这个函数指针初始化为设备驱动程序中提供用来初始化dev ice 结构的过程,实际上就是用来检测和驱动网络设备的。在进行检测前,每一个节点的init 函数都指向对应的初始化函数;检测时对每一个节点都分别用init 函数,如果成功则返回并将该节点保留。
在这个结构里面还定义了对硬件设备的打开和关闭函数指针(open 和clo se)、硬件头的建立函数指针(hard_header )、硬件上数据的传输函数指针(har d_start_x mit)
。
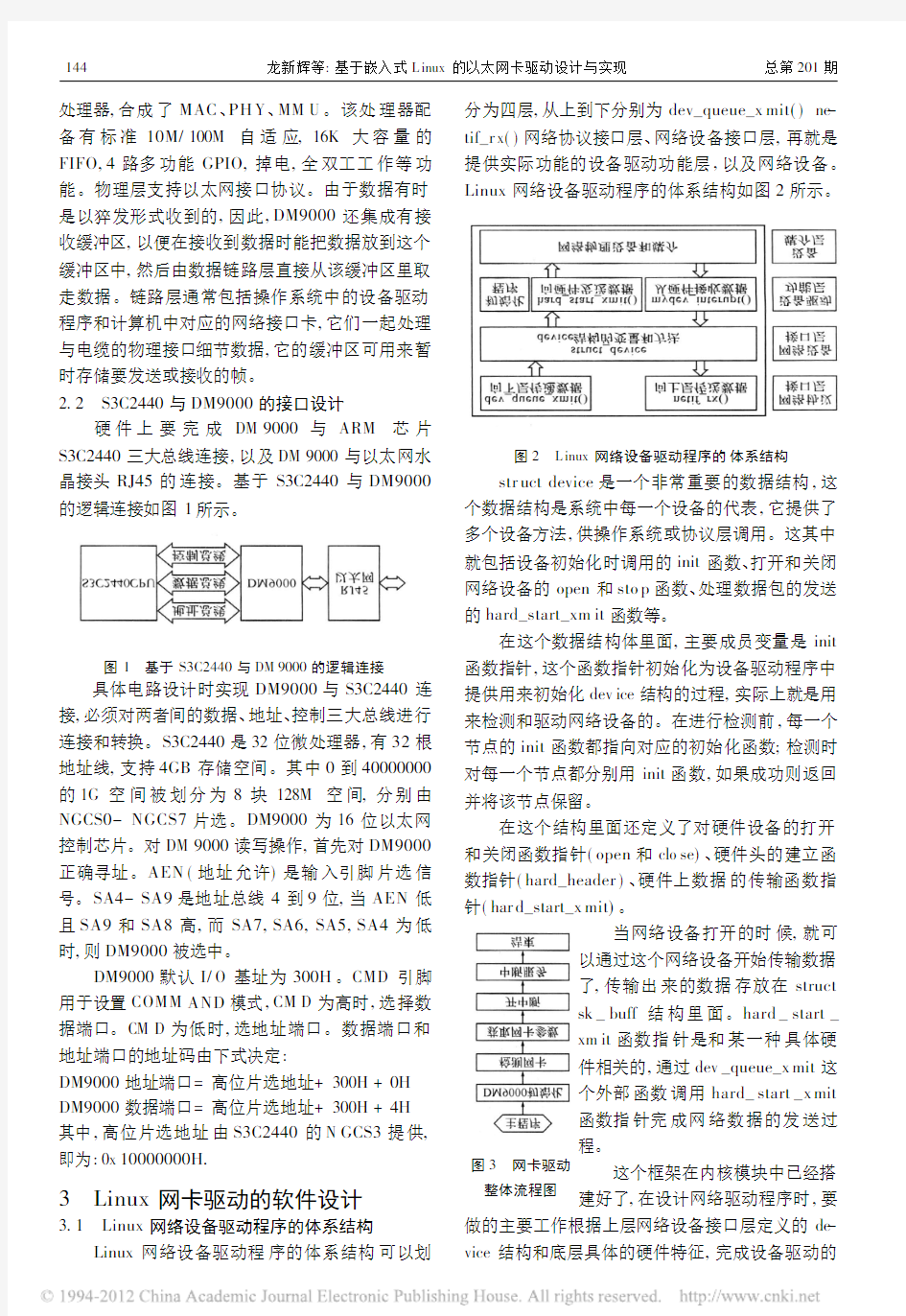
图3 网卡驱动整体流程图
当网络设备打开的时候,就可以通过这个网络设备开始传输数据了,传输出来的数据存放在struct sk _buff 结构里面。hard _start _xm it 函数指针是和某一种具体硬件相关的,通过dev _queue_x mit 这个外部函数调用hard_start _x mit 函数指针完成网络数据的发送过程。
这个框架在内核模块中已经搭建好了,在设计网络驱动程序时,要
做的主要工作根据上层网络设备接口层定义的de -vice 结构和底层具体的硬件特征,完成设备驱动的
2011年第3期舰船电子工程145
功能,具体主要步骤初始化硬件,接受数据包,发送数据包,调试驱动。如图3所示整体流程。3.2 DM 9000的初始化
由于需要通过M em ory 模式访问网卡设备,因此需要配置存储器控制寄存器模式。关联设备的初始化探测函数dm 9000_probe,在dm9000_probe 函数中主要是填充该设备的dev 结构。网络接口探测方式不同,所以不能在编译阶段进行dev 结构的设置。这样从dev y init 返回时,dev 结构中应该填充正确的值。dev 结构中包含相关的网卡操作函数指针,为上层调用网卡驱动提供方法。内核提供了eth_setup 函数,可处理以太网的某些缺省设置,在探测函数中还要分配net _device 的priv 字段,该字段所指向的数据项通常包含接口上的统计信息。用户可以在任何时刻通过调用ifconfig 获得统计数据,向内核注册网络设备驱动程序。3.3 数据的发送
如图4所示,当网卡接收到数据就会触发一次中断,在中断例程中调用接收包的函数dm9000_rx 。首先读取接收的状态和长度,使用dev_alloc_skb 分配一段足够大小的缓冲区,得到该包的网络协议ID 号,在一个申请好的sk_buff 的缓冲区中保留一块空间,这个空间一般是用做下一层协议的头空间;接着将网卡接收缓冲区中的数据读到skb 缓冲区中,再使用netif_rx 通知上层协定有新的封包传入。在一个封包传送完成后,必须将缓冲区释
放。
图4 数据帧的发送
3.4 数据的接收
当主机要发送数据时调用hard_star t_x mit 方法将数据放入外发队列,而此方法关联的函数就是
dm9000_send_packet 。内核处理后的每个数据包位于一个套接字缓冲区(str uct sk_buff)结构,核心处理的每个包包含在一个套接字缓冲区结构,输入输出缓冲区都是sk_buff 结构的链表,传递给har d _star t_xm it 的套接子缓冲区包含有物理包,它具有传输层的包头。接口不需要修改被发送的数据。实际的硬件接口是异步传输数据包的,硬件中有缓冲区以保存要外发的数据包,但是此缓冲空间非常有限。如图5所示,在此函数中首先通知上层表明硬件缓冲区已经用完不要再送封包下来,然后向网卡发命令表示要开始发送数据并且指明发送数据的长度,接着读Bust 寄存器判断当前网卡状态,如果主机中的发送缓冲区可用,则将skb 中数据发到网卡的缓冲区中,最后释放SKB 。如果网卡将数据发送成功,则会触发一次中断,在中断处理例程中将net_device_stats 结构体中的tx_packets(表示发送的包的个数)
元递增并通知上层可继续送包下来。
图5 数据帧的发送
4 软件调试与验证
4.1 测试环境
在调试过程中,可以先建立可下载的镜像文件。在目标板上先烧录bootloader 。通过boot -loader 将内核映像下载到目标板运行。而网络驱动是属于bootloader 的一部分所以会在下载过程中一同写入目标板。
1)主机环境。主机环境是在ubuntu 上运行
的Linux 的集成交叉开发环境及相关的测试用软件。
2)目标机环境。目标机的硬件环境是S3C2440开发板。
146龙新辉等:基于嵌入式L inux的以太网卡驱动设计与实现总第201期
由主机和目标机共同组成了网络驱动程序的测试环境,两者通过串口及网线相连,在调试网络驱动之前要通过串口加载程序。加载程序之后就可以针对以太网接口来进行相关测试工作。
4.2驱动程序测试
测试过程中在目标机上编写基于T CP协议的tcpServer()任务作为测试用程序,其功能是实现简单TCP服务器端程序。上位机运行相应的Client 客户端程序,由两端组成T CP的Client-Sever系统进行网络接口速度测试和可靠性测试,经测试,证明已经PING通实验板,可以进行数据传输,证明所开发的网络驱动程序实现了所有先期设计功能,并在速度上得到了验证,能够满足大批量数据传输工作。至此,初步调试过程结束,本方案取得了令人满意结果。
5结语
本文的方案实现了S3C2440与DM9000的以太网卡接口设计,使10M以太网大量数据的快速传输成为可能。采用该方案,除了可以充分利用PC机上各种资源,还可以实现嵌入式系统间的数据交换。该设计方案对大多数嵌入式设备的网络应用具有较高的通用性。
参考文献
[1]Ch-i H ung Chou,T sung-H sien Y ang.Standar d operat-
ing pr ocedures fo r embedded L inux systems[J].L inux Journal,2007,8(160):16~25
[2]M ichael Ba rr,Anthony M assa.Pr og ramming Embed-
ded Sy stems:W ith C and GN U Dev elo pment T o ols, 2nd Edition[M].O p Reilly M edia,Inc.,2007
[3]Daniel P.Bo vet,M arco Cesati.U nderstanding the
L inux K ernel,3nd Edition.O p Reilly,2006
[4]杜春雷.A RM体系架构与编程[M].北京:清华大学出
版社,2003
[5]Stev ens W R.T CP/IP详解卷1:协议[M].范建华,等
译.北京:机械工业出版社,2001
[6]DA V ICOM Semiconductor,Inc.DM9000A DA T A
SH EET
[7]Samsung Electr onics Co.L td.U ser p s M anual of
S3C2440[EB/O L]
[8]李亚锋,欧文盛.A RM嵌入式L inux系统开发从入门
到精通[M].北京:清华大学出版社,2007
(上接第121页)
f(x)作为适应度函数,交叉概率取65%,变异概率取4%,种群大小为100,遗传代数为1000,经过遗传算法优化系统效能参数,利用M atlab进行仿真计算,优化结果如表2所示。
5结语
本文把支持向量机方法引入到末敏弹命中概率预测中,充分利用训练样本的分布特性,根据部分训练样本构建判别函数,SVM算法最终转化为二次凸规划问题,得到的将是全局最优解,有效避免了神经网络易陷入局部极值的问题,同时通过非线性变换和核函数巧妙解决了高维数问题,使得其算法复杂度与样本维数无关,提高了训练学习速度;另外,它能根据有限的样本信息在模型的复杂性和学习能力之间寻求折中,保证其有较好的泛化性能,用于末敏弹效能评估是科学、有效、可靠的。最后,本文采用遗传算法对系统效能参数进行了优化,求解预测模型,获得了影响系统效能的几个主要因素的合理搭配,为末敏弹的系统效能研究提供了依据。
参考文献
[1]王颂康,朱鹤松.高新技术弹药[M].北京:兵器工业出
版社,2007
[2]成楚之.末端子弹技术发展的探讨[J].现代防御技术,
2006(1)
[3]刘荣忠.末敏弹结构动态响应和数能分析研究[D].南
京:南京理工大学博士学位论文,2006
[4]姜礼平,等.基于支持向量机和遗传算法的末敏弹系统
效能参数优化设计[J].海军工程大学学报,2007(2) [5]黄鹍,等.基于神经网络和遗传算法的末敏弹系统效能
参数优化设计[J].兵工学报,2004,25(3):257~260 [6]黄鹍,刘荣忠.末敏弹系统效能灵敏度分析[J].兵工学
报,2001,22(3):412~41
从软件工程的角度来说,嵌入式应用软件也有一定的生命周期,如要进行需求分析、系统设计、代码编写、调试和维护等工作,软件工程的许多理论对它也是适用的。 但和其他通用软件相比,它的开发有许多独特之处: ·在需求分析时,必须考虑硬件性能的影响,具体功能必须考虑由何种硬件实现。 ·在系统设计阶段,重点考虑的是任务的划分及其接口,而不是模块的划分。模块划分则放在了任务的设计阶段。 ·在调试时采用交叉调试方式。 ·软件调试完毕固化到嵌入式系统中后,它的后期维护工作较少。 下面主要介绍分析和设计阶段的步骤与原则: 1、需求分析 对需求加以分析产生需求说明,需求说明过程给出系统功能需求,它包括:·系统所有实现的功能 ·系统的输入、输出 ·系统的外部接口需求(如用户界面) ·它的性能以及诸如文件/数据库安全等其他要求 在实时系统中,常用状态变迁图来描述系统。在设计状态图时,应对系统运行过程进行详细考虑,尽量在状态图中列出所有系统状态,包括许多用户无需知道的内部状态,对许多异常也应有相应处理。 此外,应清楚地说明人机接口,即操作员与系统间地相互作用。对于比较复杂地系统,形成一本操作手册是必要的,为用户提供使用该系统的操作步骤。为使系统说明更清楚,可以将状态变迁图与操作手册脚本结合起来。
在对需求进行分析,了解系统所要实现的功能的基础上,系统开发选用何种硬件、软件平台就可以确定了。 对于硬件平台,要考虑的是微处理器的处理速度、内存空间的大小、外部扩展设备是否满足功能要求等。如微处理器对外部事件的响应速度是否满足系统的实时性要求,它的稳定性如何,内存空间是否满足操作系统及应用软件的运行要求,对于要求网络功能的系统,是否扩展有以太网接口等。 对于软件平台而言,操作系统是否支持实时性及支持的程度、对多任务的管理能力是否支持前面选中的微处理器、网络功能是否满足系统要求以及开发环境是否完善等都是必须考虑的。 当然,不管选用何种软硬件平台,成本因素都是要考虑的,嵌入式Linux 正是在这方面具有突出的优势。 2、任务和模块划分 在进行需求分析和明确系统功能后,就可以对系统进行任务划分。任务是代码运行的一个映象,是无限循环的一段代码。从系统的角度来看,任务是嵌入式系统中竞争系统资源的最小运行单元,任务可以使用或等待CPU、I/O设备和内存空间等系统资源。 在设计一个较为复杂的多任务应用系统时,进行合理的任务划分对系统的运行效率、实时性和吞吐量影响都极大。任务分解过细会不断地在各任务之间切换,而任务之间的通信量也会很大,这样将会大大地增加系统的开销,影响系统的效率。而任务分解过粗、不够彻底又会造成原本可以并行的操作只能按顺序串行执行,从而影响系统的吞吐量。为了达到系统效率和吞吐量之间的平衡折中,在划分任务时应在数据流图的基础上,遵循下列步骤和原则:
RedHat5.1下安装Realtek8168网卡驱动 1.先识别机器上的网卡型号: [root@localhost kernel]#kudzu --probe --class=network 2、使用命令查看kernel包是否都装全了,具体如下: [root@localhost kernel]# rpm -qa | grep kernel 如果装全了,会显示如下几个包: kernel-xen-devel-2.6.18-8.el5 kernel-devel-2.6.18-8.el5 kernel-2.6.18-8.el5 kernel-xen-2.6.18-8.el5 kernel-headers-2.6.18-8.el5 如果没有装全,就在redhat enterprise Linux 5.0第一个ISO的Server文件目录下可以找到对应的包,拷贝到某一具体目录下,进入目录后,用如下命令就可以进行安装: [root@localhost kernel]# rpm -ivh kernel-devel-2.6.18-8.el5.x86_64.rpm
注意:如果不装全这些包,在网卡编译时就会报错说找不到src目录文件。 用如下命令查看GCC是否安装,通常都装上的,还是检查一下比较好。 [root@localhost 2.6.18-8.el5]# whereis -b gcc gcc : /usr/bin/gcc /usr/lib/gcc /usr/libexec/gcc 3、将r8168-8.aaa.bb.tar.bz2解压出来变成r8168-8.aaa.bb文件夹形式,拷到U盘 在redhat下挂载U盘: 插入U盘 [root@localhost kernel]#mount /dev/sdb1 /mnt/usb 4.将r8168-8.aaa.bb文件夹拷都本地,如/home目录下 首先将u盘中的驱动程序包拷贝到/home目录下 [root@localhost media]# cp r8168-8\[1\].011.00.tar.bz2 /home/ [root@localhost media]# cd /home/ [root@localhost home]# ls r8168-8[1].011.00.tar.bz2 5.其次解压驱动程序包 [root@localhost home]# tar -vjxf r8168-8\[1\].011.00.tar.bz2
第31卷 第2期 2008年4月 电子器件 Ch in es e Jo u rnal Of Electro n Devi ces Vol.31 No.2Apr.2008 Design and Implementation of Audio Driver for Embedded Linux System YU Yue,YA O G uo -liang * (N ational A S I C S ystem Eng ine ering Center ,S outhe ast Unive rsity ,N anj ing 210096,China) Abstract:This paper intro duces the fundam ental principle and architecture of the audio system w hich con -sists of the CODEC UCB1400and the 805puls,and describes the design of audio dev ice dr iv er based on Audio Codec .97for Embedded Linux System.The paper focuses o n the implementatio n of the DM A trans -port and ioctl interface.T he audio dr iv e is running w ell in actual Embedded Linux system equipments.Key words:805plus;embedded Linux;Audio A C .97driver;DM A;ioctl interface EEACC :1130B 嵌入式Linux 系统中音频驱动的设计与实现 虞 跃,姚国良 * (东南大学国家专用集成电路系统工程中心,南京210096) 收稿日期:2007-07-09 作者简介:虞 跃(1982-),男,东南大学电子工程系国家专用集成电路工程技术研究中心硕士研究生,研究方向为嵌入式系统设计; 姚国良(1979-),男,东南大学电子工程系博士研究生,yuyueo@https://www.doczj.com/doc/1e13294212.html,. 摘 要:介绍了由805puls 处理器和U CB1400编解码芯片构成的音频系统体系结构及工作原理,接着阐述了嵌入式Linux 操作系统下基于A C .97协议标准的音频设备驱动程序的设计与实现。其中着重讲述了采用循环缓冲区进行音频数据的DM A 传输流程以及ioctl 接口的实现。此设计方案已在嵌入式L inux 系统中得到使用,运行效果良好。 关键词:805plus;嵌入式L inux ;AC .97音频驱动;DM A;ioctl 接口中图分类号:TP391 文献标识码:A 文章编号:1005-9490(2008)02-0709-03 嵌入式音频系统广泛应用于GPS 自动导航、PDA,3G 手机等移动信息终端,具备播放、录音功能的音频系统的应用使得移动信息终端上视听娱乐IP 电话、音频录制等成为可能,并推动了移动信息终端设备的发展。 在软件上,嵌入式操作系统的新兴力量Linux 的开源性,内核可定制等优点吸引了许多的开发者与开发商。它是个和U nix 相似、以核心为基础的、完全内存保护、多任务多进程的操作系统。支持广泛的计算机硬件,包括X86,A lpha,Sparc,M IPS,PPC,ARM ,NEC,MOT OROLA 等现有的大部分芯片[1]。 本文针对805puls 微处理器选用Philips 公司的编解码芯片(CODEC)U CB1400,构建了基于Au -dio Codec .97(AC .97)标准的音频系统。并介绍了该音频系统在Linux 操作系统2.4.19内核下驱动 程序的实现技术。 1 音频系统构架 1.1 微处理器805plus 805plus 是东南大学ASIC 系统工程技术研究中心和北京大学微处理器研究开发中心共同设计和开发的32bit 嵌入式微处理器,是采用H ar vard 结构的RISC 处理器。内部采用五级流水线结构,兼容16bit 和32bit 的指令系统805plus 嵌入式微处理器集成了存储接口EMI,时钟和功耗管理PM C,中断控制器INTC,通用定时器T IM ER,脉宽调制器PWM,实时时钟RT C,通用串口UA RT,LCD 控制器LCDC,AC .97控制器,同步外设接口SPI 。1.2 AC .97协议标准[2] AC'97协议标准是一套关于A C'97数字音频处理(AC'97Digital Controller)、AC '97数字串口(AC
CAN总线在嵌入式Linux下驱动程序的实现 时间:2009-11-05 09:41:22 来源:微计算机信息作者:黄捷峰蔡启仲郭毅锋田小刚 1 引言 基于嵌入式系统设计的工业控制装置,在工业控制现场受到各种干扰,如电磁、粉尘、天气等对系统的正常运行造成很大的影响。在工业控制现场各个设备之间要经常交换、传输数据,需要一种抗干扰性强、稳定、传输速率快的现场总线进行通信。文章采用CAN总线,基于嵌入式系统32位的S3C44B0X微处理器,通过其SPI接口,MCP2510 CAN控制器扩展CAN总线;将嵌入式操作系统嵌入到S3C44B0X微处理器中,能实现多任务、友好图形用户界面;针对S3C44B0X微处理器没有内存管理单元MMU,采用uClinux嵌入式操作系统。这样在嵌入式系统中扩展CAN设备关键技术就是CAN设备在嵌入式操作系统下驱动程序的实现。文章重点解决了CAN总线在嵌入式操作系统下驱动程序实现的问题。对于用户来说,CAN设备在嵌入式操作系统驱动的实现为用户屏蔽了硬件的细节,用户不用关心硬件就可以编出自己的用户程序。实验结果表明驱动程序的正确性,能提高整个系统的抗干扰能力,稳定性好,最大传输速率达到1Mb/s;硬件的错误检定特性也增强了CAN的抗电磁干扰能力。 2 系统硬件设计 系统采用S3C44B0X微处理器,需要扩展CAN控制器。常用的CAN控制器有SJA1000和MCP2510,这两种芯片都支持CAN2.0B标准。SJA1000采用的总线是地址线和数据线复用的方式,但是嵌入式处理器外部总线大多是地址线和数据线分开的结构,这样每次对SJA1000操作时需要先后写入地址和数据2次数据,而且SJA1000使用5V逻辑电平。所以应用MCP2510控制器进行扩展,收发器采用82C250。MCP2510控制器特点:1.支持标准格式和扩展格式的CAN数据帧结构(CAN2.0B);2.0~8字节的有效数据长度,支持远程帧;3.最大1Mb/s的可编程波特率;4.2个支持过滤器的接受缓冲区,3个发送缓冲区; 5.SPI高速串行总线,最大5MHz; 6.3~5.5V宽电压范围供电。MCP2510工作电压为3.3V,能够直接与S3C44B0X微处理器I/O口相连。为了进一步提高系统抗干扰性,可在CAN控制器和收发器之间加一个光隔6N137。其结构原理框图如图1: 图1.S3C44B0X扩展CAN结构框图图2.字符设备注册表 3 CAN设备驱动程序的设计 Linux把设备看成特殊的文件进行管理,添加一种设备,首先要注册该设备,增加它的驱动。设备驱动程序是操作系统内核与设备硬件之间的接口,并为应用程序屏蔽了硬件细节。在linux中用户进程不能直接对物理设备进行操作,必须通过系统调用向内核提出请求,
linux驱动开发的经典书籍 结构、操作系统、体系结构、编译原理、计算机网络你全修过 我想大概可以分为4个阶段,水平从低到高 从安装使用=>linux常用命令=>linux系统编程=>内核开发阅读内核源码 其中学习linux常用命令时就要学会自己编译内核,优化系统,调整参数 安装和常用命令书太多了,找本稍微详细点的就ok,其间需要学会正则表达式 系统编程推荐《高级unix环境编程》,黑话叫APUE 还有《unix网络编程》 这时候大概还需要看资料理解elf文件格式,连接器和加载器,cmu的一本教材中文名为《深入理解计算机系统》比较好 内核开发阅读内核源码阶段,从写驱动入手逐渐深入linux内核开发 参考书如下《linux device drivers》,黑话叫ldd 《linux kernel development》,黑话叫lkd 《understading the linux kernel》,黑话叫utlk 《linux源码情景分析》 这四本书为搞内核的必读书籍 最后,第三阶段和第四阶段最重动手,空言无益,光看书也不罩,不动手那些东西理解不了 学习linux/unix编程方法的建议 建议学习路径: 首先先学学编辑器,vim, emacs什么的都行。 然后学make file文件,只要知道一点就行,这样就可以准备编程序了。 然后看看《C程序设计语言》K&R,这样呢,基本上就可以进行一般的编程了,顺便找本数据结构的书来看。 如果想学习UNIX/LINUX的编程,《APUE》绝对经典的教材,加深一下功底,学习《UNP》的第二卷。这样基本上系统方面的就可以掌握了。 然后再看Douglus E. Comer的《用TCP/IP进行网际互连》第一卷,学习一下网络的知识,再看《UNP》的第一卷,不仅学习网络编程,而且对系统编程的一些常用的技巧就很熟悉了,如果继续网络编程,建议看《TCP/IP进行网际互连》的第三卷,里面有很多关于应用
linux下安装编译网卡驱动的方法 你还在为不知道linux下安装编译网卡驱动的方法而不知所措么?下面来是小编为大家收集的linux下安装编译网卡驱动的方法,欢迎大家阅读: linux下安装编译网卡驱动的方法 安装linux操作系统后发现没有网卡驱动,表现为 system → Administration → Network下Hardware列表为空。 以下为安装编译网卡驱动的过程,本人是菜鸟,以下是我从网上找的资料进行整理,并实际操作的过程,仅供借鉴。 一.检测linux系统内核版本和网卡类型,相关命令如下: uname -r 查看linux内核版本(uname -a 可显示所有信息)
lsmod 设备加载情况 ls /usr/share/hwdata 查看硬件设备 lspci 查看pci网卡设备ethernet controller 厂商和型号,modprobe **** ****为网卡型号,例如modprobe RTL8101E ,如果出错,说明模块不存在,该型号不识别 我在这一步时查找不到网卡型号,无奈只能由同时采购的其他相同型号预装win7的电脑下查看网卡型号,是个笨办法,嘿嘿…… 找到网卡型号后就到驱动之家下载了相应网卡的linux驱动,这些需要根据自己的实际情况下载,不多说了,重点是后面。 二.下载网卡驱动 Intel_e1000e-1.9.5.zip 为我下载的所需的网卡驱动,这个在linux下需自己编译. 三.安装网卡驱动
1.检测编译需要用到内核的源代码包和编译程序gcc。所以如果没有的话,要先装。 [root@localhost ~]# rpm -qa|grep kernel kernel-xen-2.6.18-8.el5 kernel-xen-devel-2.6.18-8.el5 kernel-headers-2.6.18-8.el5 [root@localhost ~]# rpm -qa|grep gcc gcc-c++-4.1.1-52.el5 libgcc-4.1.1-52.el5 gcc-4.1.1-52.el5 gcc-gfortran-4.1.1-52.el5 如果缺少kernel-xen-devel-2.6.18-8.el5,可以去安装光
linux驱动程序的编写 一、实验目的 1.掌握linux驱动程序的编写方法 2.掌握驱动程序动态模块的调试方法 3.掌握驱动程序填加到内核的方法 二、实验内容 1. 学习linux驱动程序的编写流程 2. 学习驱动程序动态模块的调试方法 3. 学习驱动程序填加到内核的流程 三、实验设备 PentiumII以上的PC机,LINUX操作系统,EL-ARM860实验箱 四、linux的驱动程序的编写 嵌入式应用对成本和实时性比较敏感,而对linux的应用主要体现在对硬件的驱动程序的编写和上层应用程序的开发上。 嵌入式linux驱动程序的基本结构和标准Linux的结构基本一致,也支持模块化模式,所以,大部分驱动程序编成模块化形式,而且,要求可以在不同的体系结构上安装。linux是可以支持模块化模式的,但由于嵌入式应用是针对具体的应用,所以,一般不采用该模式,而是把驱动程序直接编译进内核之中。但是这种模式是调试驱动模块的极佳方法。 系统调用是操作系统内核和应用程序之间的接口,设备驱动程序是操作系统内核和机器硬件之间的接口。设备驱动程序为应用程序屏蔽了硬件的细节,这样在应用程序看来,硬件设备只是一个设备文件,应用程序可以像操作普通文件一样对硬件设备进行操作。同时,设备驱动程序是内核的一部分,它完成以下的功能:对设备初始化和释放;把数据从内核传送到硬件和从硬件读取数据;读取应用程序传送给设备文件的数据和回送应用程序请求的数据;检测和处理设备出现的错误。在linux操作系统下有字符设备和块设备,网络设备三类主要的设备文件类型。 字符设备和块设备的主要区别是:在对字符设备发出读写请求时,实际的硬件I/O一般就紧接着发生了;块设备利用一块系统内存作为缓冲区,当用户进程对设备请求满足用户要求时,就返回请求的数据。块设备是主要针对磁盘等慢速设备设计的,以免耗费过多的CPU时间来等待。 1 字符设备驱动结构 Linux字符设备驱动的关键数据结构是cdev和file_operations结构体。
本人此刻还不是什么驱动工程师,连入门都谈不上,但我坚信在未来的3-5年我肯定能成为我想像中的人,因为我马上就要进入这一行工作了。写下这个日志来记录我是怎么最后成为我想像中的人才的,呵呵。 《Linux驱动工程师》这个东西是我在大二的时候看到有一篇讲如何学习嵌入式的,点击这里下载PDF,里面讲到嵌入式分为四层:硬件,驱动,系统,应用程序;还说linux驱动最难然后工资也最高就冲着他这句话我就决定我大学毕业的时候要去做这个linux驱动工程师,随后我就先后买了51单片机,ARM7,ARM9还有一大堆的视频教程准备来进行学习。我还跟我旁边那个哈工大哥们说:“我们学校像我这样的人很少,你们学校呢?”他说:“太少了,不过我们学校都是做这种板子卖的人比较多!”。行,你们牛!即使是买了这些东西,从大二到现在都快毕业了但感觉还是没有入门。回想一下我都学过什么啊:1:自己在ARM9上写bootloader(主要锻炼了三方面的知识:C语言应该写了有近万行的代码,ARM9的外设的基本操作方法如UART,LCD,TOUCH,SD,USB,ETHERNET...,makefile);2:移植和学习linux驱动。下面我说一下我学习Linux驱动的一个思路这也是我在面试的时候自我介绍中最重要的部分;1:硬件知识学习Linux驱动首先得了解这个驱动对应的硬件的一些基本原理和操作方法比如LCD你得了解它的场同步,行同步,像素时钟,一个像素的表示模式,还有就是这个LCD是怎么把图像显示在屏幕上的。如果是USB,SD卡就得了解相关协议。可以通过spec(协议)、datasheet来了解,这就是传说中的Linux驱动开发三件宝之二,还有一个就是linux相关源码。2:了解linux驱动框架linux下的每一类驱动差不多都是一个比较完善的子系统,比如FLASH的驱动它就属于MTD子系统从上到下分为四层:设备节点层,设备层,原始设备层,最下面的与具体硬件相关的硬件驱动层,通常要我们自己来实现就是最下面这个与具体硬件相关那部分代码。3:了解这个驱动的数据流。这个过程与第二个过程紧密相关,如果了解了驱动的框架差不多这个过程也算了解了。比如flash.在/dev/目录下有对应flash的字符设备文件和块设备文件,用户对这些文件进行读、写、ioctl操作,其间通过层层的函数调用最终将调用到最下面的硬件驱动层对硬件进行操作。了解这个过程我相信在调试驱动的时候是很有帮助。3:分析与硬件相关通常需要我们实现的那部分源代码。4:三板子上将驱动调试出来。每次调试都会出问题,但我买的板子提供的资料比较全调试过程中遇到的问题都比较浅显,即使是浅显的问题也要把它记录下来。(这个是我上次在华为面试的时候,那个人问我你调试驱动遇到过什么问题吗?你是如何解决的。当时我学习还没有到调试驱动这一步,所以那次面试也惨败收场)。 好像说了这么多,还没有进入正题《工作的选择》。在年前去了龙芯,实习2.8K,转正3.5k,环境还是不错,经理很好,头儿也很帅都是中科院的硕士。不过去了两周我就没去了身边的人都不太理解,我也一度有过后悔的时候,从龙芯出来应该是1月6号,也就是从那个时候开始我就没有再找工作,转而学习linux驱动。一直到上周日。上周日的晚上我就开始投简历一开始要找linux驱动,在智联里面输入linux驱动出来500来个职位,点开一看没有一个自己符合要求的,差不多都要3-5年经验本科,有时候好不容易有个实习的关键字在里面,一看要求硕士,严重打击了我的信心,哎不管了随便投,最后又投了一下嵌入式关键字的职位。最后就瞎申请,看看职位要求差不多就申请。周一来了,这周一共来了6个面试,创下了我求职以来的历史新高。周一下午面了一家感觉还不错不过到现在也没有给我一个通知,估计当时我要了4500把他给要跑了,这家是做测量的不是Linux驱动,差不多是把ARM当单片机用。周二上午一家也是要招linux驱动面了估计不到二分钟,他
2011年研发二部工作 周报月报 作者:赵玉武 时间:2012-6-13
目录 一、整理漏扫系统的结构 (1) 1、整理NetScan目录中的程序。 (1) 2、整理proftpd目录中内容(插件的检测信息)。 (4) 3、整理proxyd目录中的安管(安管平台)。 (8) 二、熟悉Nessus的工作原理 (8) 1、Nessus扫描引擎的工作原理... 错误!未定义书签。 三、整理运行的整个流程.............. 错误!未定义书签。 1、通过客户端下发策略,上传到服务器上。错误!未定 义书签。 2、服务端:接收客户端下发的策略。错误!未定义书签。 3、服务端进行身份的认证....... 错误!未定义书签。
一、整理漏扫系统的结构 网卡是Linux服务器中最重要网络设备。据统计,Linux网络故障有35%在物理层、25%在数据链路层、10%在网络层、10%在传输层、10%在对话、7%在表示层、3%在应用层。由此可以看出,网络故障通常发生在网络七层模型的下三层,即物理层、链路层和网络层。对应于实际网络也就是使用的网络线缆、网卡、交换机、路由器等设备故障。Linux的网络实现是模仿FreeBSD的,它支持FreeBSD 的带有扩展的Sockets(套接字)和TCP/IP协议。它支持两个主机间的网络连接和Sockets通讯模型,实现了两种类型的Sockets:BSD Sockets和INET Sockets。它为不同的通信模型和服务质量提供了两种传输协议,即不可靠的、基于消息的UDP传输协议和可靠的、基于流的传输协议TCP,并且都是在IP网络协议上实现的。INET sockets 是在以上两个协议及IP协议之上实现的。 由于交换机、路由器通常独立于Linux或者其他操作系统。网卡设置故障是造成Linux 服务器故障最主要原因。可能因为硬件的质量或性能、磨损老化、人为误操作、不正确的网络设置、管理问题、Linux软件的BUG、系统受到黑客攻击和Linux病毒等原因造成。 Linux 服务器网卡故障排除的思路是:应当遵循先硬件后软件的方法。因为硬件如果出现物理损坏那么如何设定网卡都不能解决故障。解决问题的方法可以从自身Linux计算机的网卡查起,如果确定硬件没有问题了,再来考虑软件的设定。 1、网卡的选择 一般来说,2.4版本以后的 Linux可以支持的网卡芯片组数量已经很完备了,包括著名厂商如:Intel 以及使用广泛的 RealTek, Via 等网卡芯片都已经被支持,所以使用者可以很轻易的设定好他们的网
参考: 韦东山视频第10课第一节内核启动流程分析之编译体验 第11课第三节构建根文件系统之busybox 第11课第四节构建根文件系统之构建根文件系统韦东山书籍《嵌入式linux应用开发完全手册》 其他《linux设备驱动程序》第三版 平台: JZ2440、mini2440或TQ2440 交叉网线和miniUSB PC机(windows系统和Vmware下的ubuntu12.04) 一、交叉编译环境的选型 具体的安装交叉编译工具,网上很多资料都有,我的那篇《arm-linux- gcc交叉环境相关知识》也有介绍,这里我只是想提示大家:构建跟文件系统中所用到的lib库一定要是本系统Ubuntu中的交叉编译环境arm-linux- gcc中的。即如果电脑ubuntu中的交叉编译环境为arm-linux-
二、主机、开发板和虚拟机要三者互通 w IP v2.0》一文中有详细的操作步骤,不再赘述。 linux 2.6.22.6_jz2440.patch组合而来,具体操作: 1. 解压缩内核和其补丁包 tar xjvf linux-2.6.22.6.tar.bz2 # 解压内核 tar xjvf linux-2.6.22.6_jz2440.tar.bz2 # 解压补丁
cd linux_2.6.22.6 patch –p1 < ../linux-2.6.22.6_jz2440.patch 3. 配置 在内核目录下执行make 2410_defconfig生成配置菜单,至于怎么配置,《嵌入式linux应用开发完全手册》有详细介绍。 4. 生成uImage make uImage 四、移植busybox 在我们的根文件系统中的/bin和/sbin目录下有各种命令的应用程序,而这些程序在嵌入式系统中都是通过busybox来构建的,每一个命令实际上都是一个指向bu sybox的链接,busybox通过传入的参数来决定进行何种命令操作。 1)配置busybox 解压busybox-1.7.0,然后进入该目录,使用make menuconfig进行配置。这里我们这配置两项 一是在编译选项选择动态库编译,当然你也可以选择静态,不过那样构建的根文件系统会比动态编译的的大。 ->Busybox Settings ->Build Options
Linux下8019网卡驱动程序 福建鑫诺通信有限公司陈光平(chenggp_fj@https://www.doczj.com/doc/1e13294212.html,) 本文以S3C44B0的CPU为例,详细解析了linux下RTL8019网卡驱动程序工作原理,其间知识大多来源互联网络,特别是浙大潘纲的论文,在此不一一列出,此文目的只是让嵌入式linux爱好者得到更多网卡驱动的资料,并获得交流机会,不足之处请指正 (一)、硬件相关部份 1、CPU与网卡的连接方式 (s3c44B0 CPU) (RTL 8019网卡) CPU与网卡接线图 上图为S3c44b0CPU和网卡的接线图,此接法并非固定,如接法不同,则牵涉到很多相应的改动,下面会详细分析不同之处 从硬件部门得到:网卡在CPU的存储空间上接BANK4,即0x08000000(看44B0手册)外部中断号为:EXTINT3 (irqs.h文件获得值为22) 上面两个值可以查CPU手册,或询问硬件设计人员 由上图可以知道以下数据: (1)、网卡与CPU地址线连接错开8位(A0接A8) (2)、总共连线,其实4根就足够用了,因为每根线可以译码4个地址空间,总共是16个地址空间,每个地址空间对应一个寄存器地址,而8019总共就是16个寄存器(3)、一般是跳线模式,不使用9346芯片 1-1 基地址算法 首先8019的基地址是300H(见RTL8019芯片资料:选择IO总线地址),但是有些硬件已在芯片中做过了偏移,比如我们的网卡已做了处理,基址已偏移到0x08000000, 那么因为网卡A0接CPU的A8,表示基地址左移8位,下一个寄存器reg0的地址就是:0x08000100(0000,0000,0001 0001,0000,0000) 还不理解的话我们看另一种接法:
Linux下查看网卡驱动和版本信息 查看网卡生产厂商和信号 查看基本信息:lspci 查看详细信息:lspci -vvv # 3个小写的v 查看网卡信息:lspci | grep Ethernet 查看网卡驱动 查看网卡驱动信息:lspci -vvv # 找到网卡设备的详细信息,包括网卡驱动 # lsmod 列出加载的所有驱动,包括网卡驱动 查看网卡驱动版本 查看模块信息:modifo
description: Intel(R) PRO/1000 Network Driver author: Intel Corporation,
嵌入式linux android驱动工程师面试题总汇 1.嵌入式系统中断服务子程序(ISR)收藏中断是嵌入式系统中重要的组成部分,这导致了很多编译开发商提供一种扩展—让标准C支持中断。具代表事实是,产生了一个新的关键字__interrupt。下面的代码就使用了__interrupt关键字去定义了一个中断服务子程序(ISR),请评论一下这段代码的。 2.C语言中对位的操作,比如对a的第三位清0,第四位置1.本来应该会的,一犯晕写反了,以后注意! #define BIT3 (1<<3) #define BIT4 (1<<4) a &= ~BIT3;a |= BIT4; 3.考到volatile含义并举例: 理解出错,举了很具体的例子,连程序都搬上去了,有些理解不深的没举出来…… volatile表示这个变量会被意想不到的改变,每次用他的时候都会小心的重新读取一遍,不适用寄存器保存的副本。 volatile表示直接存取原始地址 例: 并行设备的硬件寄存器(状态寄存器) 在多线程运行的时候共享变量也要时时更新 一个中断服务子程序中访问到的的非自动变量(不太清楚,正在查找资料ing……) 4.要求设置一绝对地址为0x67a9的整型变量的值为0xaa66
当时我的写法: #define AA *(volatile unsigned long *)0xaa66AA = 0x67a9; 答案: int *ptr =(int *)0xaa66; *ptr = 0x67a9; 我感觉自己写的应该不算错吧(自我感觉,还请达人指正),我写的适合裸机下用,当做寄存器用,而答案就是适合在操作系统下的写法。 1. linux内核里面,内存申请有哪几个函数,各自的区别? 2. IRQ和FIQ有什么区别,在CPU里面是是怎么做的? 3. int *a; char *b; a 和b本身是什么类型? a、b里面本身存放的只是一个地址,难道是这两个地址有不同么? 4.xx的上半部分和下半部分的问题: 讲下分成上半部分和下半部分的原因,为何要分?讲下如何实现? 5.内核函数mmap的实现原理,机制? 6.驱动里面为什么要有并发、互斥的控制?如何实现?讲个例子? 7. spinlock自旋锁是如何实现的? 8.任务调度的机制? 【二、本人碰到】
对一个具有四个按键的按键驱动的分析 源代码: /*Headers-------------------------------------------------*/ #include
本讲主要概述Linux设备驱动框架、驱动程序的配置文件及常用的加载驱动程序的方法;并且介绍Red Hat Linux安装程序是如何加载驱动的,通过了解这个过程,我们可以自己将驱动程序放到引导盘中;安装完系统后,使用kudzu自动配置硬件程序。 Linux设备驱动概述 1. 内核和驱动模块 操作系统是通过各种驱动程序来驾驭硬件设备,它为用户屏蔽了各种各样的设备,驱动硬件是操作系统最基本的功能,并且提供统一的操作方式。正如我们查看屏幕上的文档时,不用去管到底使用nVIDIA芯片,还是ATI芯片的显示卡,只需知道输入命令后,需要的文字就显示在屏幕上。硬件驱动程序是操作系统最基本的组成部分,在Linux内核源程序中也占有较高的比例。 Linux内核中采用可加载的模块化设计(LKMs ,Loadable Kernel Modules),一般情况下编译的Linux内核是支持可插入式模块的,也就是将最基本的核心代码编译在内核中,其它的代码可以选择是在内核中,或者编译为内核的模块文件。 如果需要某种功能,比如需要访问一个NTFS分区,就加载相应的NTFS模块。这种设计可以使内核文件不至于太大,但是又可以支持很多的功能,必要时动态地加载。这是一种跟微内核设计不太一样,但却是切实可行的内核设计方案。 我们常见的驱动程序就是作为内核模块动态加载的,比如声卡驱动和网卡驱动等,而Linux最基础的驱动,如CPU、PCI总线、TCP/IP协议、APM(高级电源管理)、VFS等驱动程序则编译在内核文件中。有时也把内核模块就叫做驱动程序,只不过驱动的内容不一定是硬件罢了,比如ext3文件系统的驱动。 理解这一点很重要。因此,加载驱动时就是加载内核模块。下面来看一下有关模块的命令,在加载驱动程序要用到它们:lsmod、modprob、insmod、rmmod、modinfo。 lsmod
换了linux系统后发现无线不能使用,很是苦恼,于是在网上找到各位大神的做法,终于成功安装。下面给大家介绍一下。本例以安装Fedora 14无线网卡驱动为例。参考文章 https://www.doczj.com/doc/1e13294212.html,/Linux/2011-05/35366.htm。 首先在https://www.doczj.com/doc/1e13294212.html,/support/802.11/linux_sta.php 上下载32位的驱动, 下载完成之后进入到下载的文件夹下 #cd ~/Downloads 按照readme的做法,新建一个文件夹,并且将该压缩文件移动到新建的文件夹当中 #mkdri hybrid_wl #mv hybrid-portsrc-x86_32-v5.60.48.36.tar.gz hybrid_wl/ 进入文件夹,进行解压, #cd hybrid_wl/ #tar -zxvf hybrid-portsrc-x86_32-v5.60.48.36.tar.gz 由于自述文件当中的做法是指定解压目录,因此为了保险,再把这个压缩文件移动到上一级目录 #mv hybrid-portsrc-x86_32-v5.60.48.36.tar.gz ../ 根据自述文件的说法(The cards with the following PCI Device IDs are supported with this driver.),查看支持的版本 # lspci -n | grep 14e4 0c:00.0 0280: 14e4:4315 (rev 01) BRCM PCI PCI DellProduct Name Vendor ID Device ID Product ID ------------- ---------- --------- ----------- 4311 2.4 Ghz 0x14e4 0x4311 Dell 1390 4311 Dualband 0x14e4 0x4312 Dell 1490
嵌入式Linux下3G模块的驱动和应用 1、开发资源 1.1、硬件资源: ZTE-mf637u(中国联通) ZTE-mu351(中国移动) 1.2、软件资源: 1.2.1、usb-modeswitch-1.1.3 libusb-0.1.12.tar.gz usb-modeswitch-1.1.3.tar.bz2 1.2.2、ppp-2.4.4 libpcap-0.9.8.tar.gz ppp-2.4.4.tar.gz 1.2.3、wvdial 1.2.3.1、wvdial-1.54.0(arm-linux-gcc 3.4.1) zlib-1.2.5.tar.bz2 openssl-0.9.7g.tar.gz openssl-0.9.7g-fix_manpages-1.patch wvstreams-4.0.1.tar.bz2
wvstreams-4.0.1-tcl84-1.patch wvdial-1.54.0.tar.gz 1.2.3.2、wvdial_1.60.4(arm-linux-gcc 4.2.2) zlib-1.2.5.tar.bz2 openssl-0.9.8n.tar.gz openssl-0.9.8n-fix_manpages-1.patch wvstreams-4.6.1.tar.gz wvdial_1.60.4.tar.gz 2、Linux开发环境 2.1、主机环境 2.1.1、主机linux系统 Fedora Core 6 2.1.2、主机编译环境 2.1.2.1、gcc -v Using built-in specs. Target: i386-redhat-linux Configured with: ../configure --prefix=/usr --mandir=/usr/share/man --infodir=/usr/share/info --enable-shared --enable-threads=posix --enable-checking=release --with-system-zlib --enable-__cxa_atexit --disable-libunwind-exceptions --enable-libgcj-multifile