集成学习综述
梁英毅
摘要 机器学习方法在生产、科研和生活中有着广泛应用,而集成学习则是机器学习的首要热门方向[1]。集成学习是使用一系列学习器进行学习,并使用某种规则把各个学习结果进行整合从而获得比单个学习器更好的学习效果的一种机器学习方法。本文对集成学习的概念以及一些主要的集成学习方法进行简介,以便于进行进一步的研究。
一、 引言
机器学习是计算机科学中研究怎么让机器具有学习能力的分支,[2]把机器学习的目标归纳为“给出关于如何进行学习的严格的、计算上具体的、合理的说明”。[3]指出四类问题的解决对于人类来说是困难的甚至不可能的,从而说明机器学习的必要性。
目前,机器学习方法已经在科学研究、语音识别、人脸识别、手写识别、数据挖掘、医疗诊断、游戏等等领域之中得到应用[1, 4]。随着机器学习方法的普及,机器学习方面的研究也越来越热门,目前来说机器学习的研究主要分为四个大方向[1]: a) 通过集成学习方法提高学习精度;
b) 扩大学习规模;
c) 强化学习;
d) 学习复杂的随机模型;
有关Machine Learning 的进一步介绍请参考[5, 1,3, 4, 6]。
本文的目的是对集成学习的各种方法进行综述,以了解当前集成学习方面的进展和问题。本文以下内容组织如下:第二节首先介绍集成学习;第三节对一些常见的集成学习方法进行简单介绍;第四节给出一些关于集成学习的分析方法和分析结果。
二、 集成学习简介
1、 分类问题
分类问题属于概念学习的范畴。分类问题是集成学习的基本研究问题,简单来说就是把一系列实例根据某种规则进行分类,这实际上是要寻找某个函数)(x f y =,使得对于一个
给定的实例x ,找出正确的分类。机器学习中的解决思路是通过某种学习方法在假设空间中找出一个足够好的函数来近似,这个近似函数就叫做分类器[7]。
y h f h
2、 什么是集成学习
传统的机器学习方法是在一个由各种可能的函数构成的空间(称为“假设空间”)中寻找一个最接近实际分类函数的分类器h [6]。单个分类器模型主要有决策树、人工神经网络、朴素贝叶斯分类器[6]等等。集成学习的思路是在对新的实例进行分类的时候,把若干个单个分类器集成起来,通过对多个分类器的分类结果进行某种组合来决定最终的分类[8,9],以取得比单个分类器更好的性能。如果把单个分类器比作一个决策者的话,集成学习的
方法就相当于多个决策者共同进行一项决策。
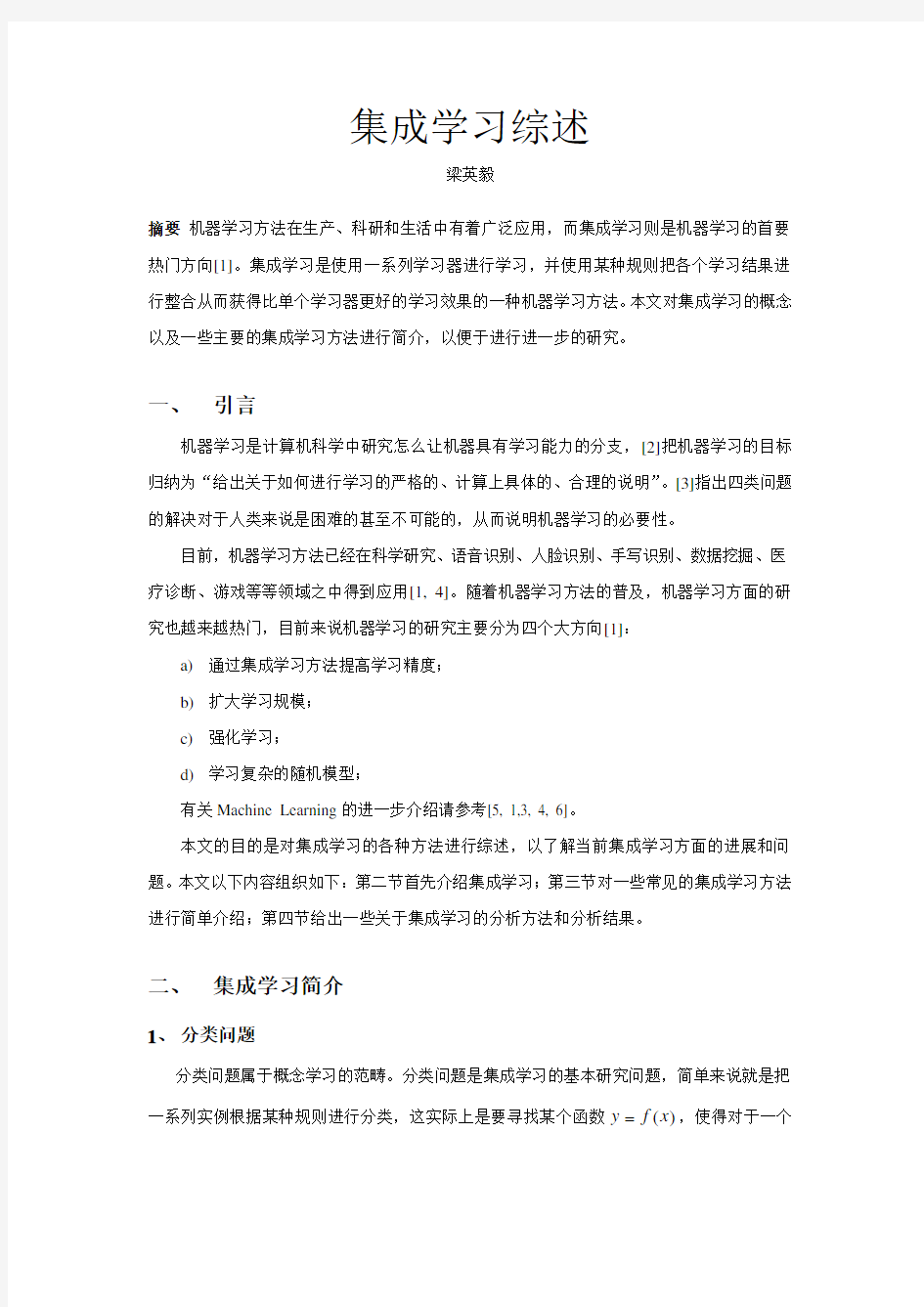
f 图表 1表示了集成学习的基本思想。图表 1中的集成分类器包括了N 个单一的人工神经网络分类器,对于同样的输入,N 个人工神经网络分别给出各自的输出(),然后这些输出通过整合以后得到集成分类器整体的输出结果作为最终分类。
n O O O ,,,21
L
图表 1 人工神经网络集成示意
在各种文献中集成学习(Ensemble Learning )也被称为committee 、classifier fusion 、combination 、aggregation 等等[9],但是他们都是指把一系列的学习器集成起来共同解决一个问题。
3、 为什么集成学习有效
Thomas G . Dietterich [8, 7]指出了集成学习有效可以归为三个方面的原因:统计上、计算
上和表示上:
a)统计上的原因
对于一般的学习任务,往往要搜索的假设空间十分巨大,但是能够用于训练分类器的训练集中实例个数不足够用来精确地学习到目标假设,这个时候学习的结果便可能是一系列满足训练集的假设,而学习算法之能够选择这些假设的其中之一作为学习到的分类器进行输出。然而通过机器学习的过拟合问题[6]我们看到,能够满足训练集的假设不一定在实际应用中有同样好的表现,这样学习算法选择哪个假设进行输出的时候就面临着一定的风险,把多个假设集成起来能够降低这种风险(这可以理解为通过集成使得各个假设和目标假设之间的误差得到一定程度的抵消)。
b)计算上的原因
已经证明了在人工神经网络学习和决策树学习中,学习到最好的人工神经网络或者是决策树是一个NP-hard问题[1 , 8],其他的分类器模型也面临着类似的计算复杂度的问题。这使得我们只能用某些启发式的方法来降低寻找目标假设的复杂度,但这样的结果是找到的假设不一定是最优的。通过把多个假设集成起来能够使得最终的结果更加接近实际的目标函数值。
c)表示上的原因
由于假设空间是人为规定的,在大多数机器学习的应用场合中实际目标假设并不在假设空间之中,如果假设空间在某种集成运算下不封闭,那么我们通过把假设空间中的一系列假设集成起来就有可能表示出不在假设空间中的目标假设。关于表示上的原因比较特别,进一步的说明可以参考[8, 9]。
4、集成学习有效的条件
虽然以上几方面的原因使得集成学习可能取得更好的学习效果,但是并不是所有的集成方式都有效的,集成学习有效的条件是每个单一的学习器错误率都应当低于0.5,否则集成的结果反而会提高错误率[11, 12, 9, 10]。
此外,进行集成学习的每个分类器还应当各不相同,这个要求可以这样理解:如果每个基本分类器分类结果差不多,则集成后的分类器整体和单个分类器做出的决策实际上没有什么差异,这样集成后的分类器就难以保证比单个分类器有更好的性能了。
三、 集成学习方法介绍
从前面对集成学习的介绍可以看出,考察一个集成学习方法的时候应该考虑以下几方面的问题:
a)基本分类器之间是什么关系?
b)怎么样生成多个不同的基本分类器?
c)如何把多个基本分类器的分类结果整合起来?
我们下面将以这三个问题为线索对现在主要的集成学习方法进行简单的介绍:
1、基本分类器之间的关系
按照基本分类器之间的种类关系可以把集成学习方法划分为异态集成学习和同态集成学习两种[10]。
a)异态集成学习
异态集成学习指的是使用各种不同的分类器进行集成,异态集成学习的两个主要代表是叠加法(Stack Generalization)[13]和元学习法(Meta Learning)[14]。
叠加法的思想是把基本学习器分布在多个层次上,用多层的学习器来完成学习任务[13]。第一层学习器按照一般学习器的方式来进行分类预测,然后第一层的预测结果作为第二层的输入由第二层再进行预测……
William W. Cohen等在[15]中利用叠加法的思想构造了一种新的串行学习算法,并且指出这种串行学习方法比不串行的单个学习器性能上有所改进。
[13] 中对叠加法进行了详细的介绍。
元学习法的思想是训练一个元分类器来对所有的基本学习器的输出进行处理,最终得到问题的输出。元学习法主要有仲裁法(arbiter)和合并法(combiner)两种,仲裁法是元分类器从所有基本分类器的输出中选择合理的结果作为输出,例如投票方式;合并法是用某种组合方法把所有基本分类器的输出合并成最终输出,Bagging、Boosting等集成方法都是属于合并法。
[14]中对元学习法给出了一个综述。
关于异态分类器的进一步资料可以参考[16]。
b)同态集成学习
同态集成学习是指集成的基本分类器都是同一种分类器,只是这些基本分类器之间的参数有所不同。同态集成的分类器包括有朴素贝叶斯集成、决策树集成[17]、人工神经网络集
成[18, 19, 20]、K-近邻集成等等[10],其中以决策树集成和人工神经网络集成居多。
2、不同的基本分类器的获得方式
基本分类器的多样性是评价集成学习算法的重要标准[10],因此如何获取不同的基本分类器对集成学习的效果有着重要影响。对于异态集成学习方法,基本分类器的不同来源于他们本身种类的不同;对于同态集成学习方法,基本分类器的不同来自于多种可能,以下把不同基本分类器的获取方式划分为五类,并分别予以说明:
a)基本分类器种类不同
如果一种集成学习方式采用异态集成的方案,则所得到的基本分类器很明显不同。但是由于有效的分类器基本模型并不多,因此进行异态集成学习的时候往往需要对于每一种分类器都给出若干不同的实例,这些同一种分类器的不同实例的产生需要用到下面几种获取方式。
b)对训练数据进行处理
i.Bagging
Bagging(Bootstrap AGGregatING)是Breiman在[21]中提出的,其思想是对训练集有放回地抽取训练样例,从而为每一个基本分类器都构造出一个跟训练集同样大小但各不相同的训练集,从而训练出不同的基本分类器。Bagging算法如图表2所示:
图表 2 Bagging算法示意
Bagging是基于对训练集进行处理的集成方法中最简单、最直观的一种。使用Bagging 算法的时候,理论上每个基本分类器的训练集中有63.2%的重复样例[21, 10]。
Breiman在[21]中同时指出,要使得Bagging有效,基本分类器的学习算法必须是不稳定
的,也就是说对训练数据敏感。基本分类器的学习算法对训练数据越敏感,Bagging的效果越好,因此对于决策树和人工神经网络这样的学习算法Bagging是相当有效的。另外由于Bagging算法本身的特点,使得Bagging算法非常适合用来并行训练多个基本分类器,这也是Bagging算法的一大优势。
那么使用Bagging算法的时候应该用多少个基本分类器合适呢?Breiman指出基本分类器数目应当随着分类种数增多而增加。
[22, 23] 给出了Bagging算法和其他集成算法的实验结果比较。关于Bagging的更多资料请参考[24, 25 , 23, 8, 16]等等。
ii.Boosting
Boosting最先由Robert T. Schapire在[26]中提出,其思想是对每那些容易分类错的训练实例加强学习,就好像一个人背英语单词一样,首先第一遍背完以后有一些容易记住的单词就记住了,还有一些不容易记住的,则第二遍的时候对那些不容易记住的单词多看几眼,第三遍又对第二遍还记不住的单词再多看几眼……具体实施的时候Boosting方法是这样进行的:首先给每一个训练样例赋予相同的权重,然后训练第一个基本分类器并用它来对训练集进行测试,对于那些分类错误的测试样例提高其权重(实际算法中是降低分类正确的样例的权重),然后用调整后的带权训练集训练第二个基本分类器,然后重复这个过程直到最后得到一个足够好的学习器。图表3给出了最常用的Boosting算法——由Yaov Freund和Schapire[27]共同提出的AdaBoost(Adaptive Boosting)算法的描述。
图表 3 AdaBoost算法
Boosting的基本目标是把一个弱学习器转化为一个任意高精度的学习器[26],什么是弱学习器呢?Schapire指出弱学习器是指一个学习效果比随机分类略好的学习器[26]。Boosting 方法为什么有效呢?近年的研究指出Boosting算法实际上是一个逐阶段最小化一个特定的误差函数的梯度下降过程[8]。
Boosting的原本目的是用于学习二值分类器,但是应用到训练多值分类器的方法也已经被研究过了[10]。与Bagging对于噪声容忍程度比较好不同,Boosting似乎对噪声容忍程度不高[8]。关于Boosting算法的实验结果比较可以参考[22, 23],进一步的资料可以参考[28, 9, 29, 17, 30, 32, 31]等。
iii.交叉验证
交叉验证法来自于K重交叉验证(K-fold Cross Validation)的测试方法,属于无放回抽抽样[1, 9, 10]。K重交叉验证的思想是把整个训练集合划分为互不相交的K等份,然后每次选定一份作为测试集,其他的K-1份作为训练集来进行学习,用这种思路可以训练出K个不同的基本分类器。跟Bagging一样,这种集成方法也适用于多个基本分类器并行进行训练。
c)对输入特征进行处理
这种方法的思想是对于具有多种输入特征的实例,通过抽取不同的输入特征子集分别进行训练,从而获得不同的分类器[10, 8, 9],把这些分类器的分类结果适当整合能够获得比任何一个基本分类器的分类精度都要高的分类器[7]。特征子集的选取又叫做集成特征选取(Ensemble Feature Selection),根据特征子集的选取方式不同,又有随机子空间法(随机抽取特征子集)和少量余留法(Input Decimation,只抽取和问题最相关的那些特征)[9];Alexey Tsymba 等在[33]中介绍了一种新的遗传搜索方法来选择输入特征子集,并指出这种方法虽然比一般方法耗时长,但是具有更佳的学习效果。
Dietterich在[1, 8]中通过两个项目中使用特征子集法的不同效果的比较指出这种方法在输入特征有大量冗余的情况下才有效。Hiroshi Mamitsuka等在[34]中也对特征子集的选取问题进行了实验研究。
d)对输出结果进行处理
Dietterich、Bakiri等在[35]中提出了一种纠错码方法来产生多个不同的基本分类器。这
种方法的基本原理是[35]在目标分类数目很多的情况下,采用某种编码方式对目标分类进行二进制编码,使得每个目标分类都分配到一个长度为L位的编码,并且保证不同的目标分类分到的编码之间的海明码距足够大,这样学习任务就转化为学习L个不同的二值分类,这样可以通过在相同的训练集上训练L个不同的二值分类器来完成,最后把每一个分类器的结果合起来找出编码值最接近这个结果的目标分类作为整个分类器的输出即可。
他们的具体做法是这样的:对于有K个目标分类的学习任务,按照编码要求计算出编码长度L,然后对于L个二值分类器的每一个做这样的处理:把所有的目标分类随机划分为A、B两部分,把划分到A的那些实例的标号改成0,其它实例的标号改成1,然后用更改标号以后的训练集来训练该二值分类器。重复这个过程L次则产生了L个不同的二值分类器。进行分类的时候对于每一个分类器的分类结果,如果是0,则给划分到对应这个分类器的A部分那些目标分类投一票,否则给其它目标分类投一票,最后看哪个目标分类得票最多来作为最终的分类结果。
在[35]里面他们通过用决策树和人工神经网络进行实验的结果说明纠错码这种集成方法不仅对于一系列难度比较大的多目标分类的问题能够有效改善基本分类器的分类精度,还有以下的优点:
i.对于训练集大小很小的情况这种方法仍然有效;
ii.不依赖于每一个目标分类的具体编码值。
同时他们也指出编码长度并不是越长越好,一种中等长度的编码会比很长的编码学习效果更好。这种方法的详细介绍请参见[1, 8, 9]等。
e)引入随机扰动
随机扰动法(Injecting Randomness)的思想是在每个基本分类器的学习过程之中引入随机扰动,使得学习出来的每个基本分类器都不同,这是用于进行人工神经网络集成学习的最常见方法[1]。只要基本学习器对随机扰动敏感,则随机扰动法能够有效地产生多个不同的基本分类器。对于人工神经网络,使用后向传递算法来进行学习的时候对于每个神经网络的初始权值都随机分配,则产生的基本分类器会有很明显的不同[1],而对于决策树,则可以在每个决策结点的特征选取的时候从某个特征子集(例如前20个导致熵增益最大的特征构成的集合)里面随机选取一个作为该结点的分类特征。
Dietterich等在[1, 22, 8]中给出了使用随机扰动法的各种实验结果,他们在其论文中并且指出在噪声相对比较低的情况下随机扰动法效果甚至会比AdaBoost算法要好,但是在噪声
比较高的情况下随机扰动法的效果并不令人满意。
随机扰动法除了对学习精度的改进以外还有一个很特别的优点,就是它可以很容易地跟前面介绍的其他集成方法结合起来,从而取得更好的学习效果。
3、 基本分类器分类结果的整合方式
现在我们有多个基本分类器的分类结果了,但是怎么根据这么多的分类结果来给出最终决策呢?Lei Xu 等在[36]中对分类器的整合问题进行了深入的研究,他们把基本分类器的整合方式归纳为三个层次:
a) 抽象层次:每个基本分类器只提供一个目标分类或者目标分类子集;
b) 排位层次:每个基本分类器提供一个可能的目标分类列表,其中的目标分类按照可
能性大小排列;
c) 度量层次:每个基本分类不仅提供分类结果,还提供每种分类结果的可能性。 本文中我们主要介绍抽象层次的整合方式,我们把这种整合方式归为四类,并分别进行说明:
a) 简单投票
投票法的基本思想是多个基本分类器都进行分类预测,然后根据分类结果用某种投票的原则进行投票表决,按照投票原则的不同投票法可以有一票否决、一致表决、少数服从多数、阈值表决等等[36, 16]。
一票否决的思想是当且仅当所有的分类器都把实例x 划分到类的时候才把i C x 划分到,否则拒绝这个实例;一致表决的思想是没有分类器反对把i C x 划分到的时候就把i C x 划分到;少数服从多数顾名思义就是当让各个基本分类器进行投票(加权或者不加权),得票数多的那个分类作为对应实例i C i C x 的最终分类;阈值表决是首先统计出把实例x 划分为和不划分为的分类器数目分别是多少,然后当这两者比例超过某个阈值的时候把i C i C x 划分到。
i C 此外,对于连续目标值的分类问题,还可以采用平均取值、加权求和、中位数、最大值等等方式进行整合[37]。
b)贝叶斯投票
简单投票法假设每个基本分类器都是平等的,没有分类能力之间的差别,但是这种假设并不总是合适的,在实际生活中,我们听取一个人的意见的时候会考虑到这个人过去的意见是否有用,贝叶斯投票法就是基于这种思想来提出的。贝叶斯投票法是基于每一个基本分类器在过去的分类表现来设定一个权值,然后按照这个权值进行投票,其中每个基本分类器的权值基于贝叶斯定理来进行计算[36, 8]。
虽然理论上贝叶斯投票法在假设空间所有假设的先验概率都正确的情况下能够获得最优的集成效果,但是实际应用中往往不可能穷举整个假设空间,也不可能准确地给每个假设分配先验概率,从而使得在实际使用中其他集成方法也会优于贝叶斯投票法。
c)基于D-S证据理论的整合方式
Lei Xu[36]、Ke Chen[38]和Ahmed Al-Ani[37]等先后提出了若干种基于D-S证据理论[77]的整合方式,这些整合方式的基本思想是通过识别率、拒绝率等一系列参数计算出每个目标分类的信任范围,从而最终推断出分类结果。关于基于D-S证据理论的整合方式的详细说明可以参考[36]和[37]。
d)对基于不同特征子集得到的基本分类器的整合
Ke Chen等在[38]中研究了基于不同特征子集所产生的基本分类器如何整合的问题。在他们的文章当中他们研究了线性整合、Winner-Take-All和证据推理几种整合方式。其中线性整合指的是使用各个基本分类器输出的线性组合来作为分类结果;Winner-Take-All指的是对于每一种输入模式都分别选定某一个基本分类器作为胜利者,把这个基本分类器的结果作为分类结果进行输出;证据推理用的就是前面说到的基于D-S证据理论的计算方法。
除此以外Mohamed S. Kamel和Nayer M. Wanas还讨论了数据相关性对于整合基本分类器的影响[39];在基本分类器个数问题上[18]中指出只拿多数基本分类器进行整合可能比拿全部基本分类器的结果进行整合效果更佳;关于基本分类器分类结果整合的更多资料请参考[40, 41, 42, 2, 16, 12, 36]。
4、其它的集成学习方法
上面介绍的集成学习方法都是离线集成学习方法,也就是说这些集成学习方法都是通过
给定一个训练集,学习以后输出一个集成的分类器。Alan Fern[43]和Alexey Tsymbal[44]等在文章中讨论了在线集成学习方法,其基本的原理是一边进行分类一边对某些基本分类器的参数进行更新,或者是添加新的基本分类器,从而实现整个分类器的动态集成。他们实现了两个在线集成学习算法并且应用到处理器的分支预测问题上面,通过比较实验结果他们指出基于Boosting的在线学习方法比基于Bagging的在线学习方法有更好的表现。
此外除了上面介绍的通用集成学习方法以外,还有一些跟特定基本分类器有关的集成学习方法[1, 9]。例如[1]中扼要介绍了一些跟人工神经网络有关的特殊集成学习算法,而Giorgio Valentini等则在[9]中对其它的特殊集成方式进行了介绍和讨论。
等[45]介绍了一种半指导的集成学习方法ASSEMBLE(Adaptive Bennet
P.
Kristin
Semi-Supervised EnsMBLE),他们对未标号数据的处理方式是依照某种规律赋予一个目标分类值,并且证明了这样的做法跟Boosting方法有类似的功能。
Guo等[GUO05]提出另外一种集成学习的思路,他们的做法不是通过学习多个 Yuhong
基本分类器来实现集成学习,而是只采用一个基本分类器,但是训练和测试这个基本分类器的时候使用成对的样例。他们在论文中指出对于大多数的机器学习应用来说,数据独立同分布的假设并不成立,从而从理论上指出利用数据的相关性可能可以通过增强假设的表示能力来改善学习效果。同时他们在文章中的实验数据表明这种集成学习的方式跟Boosting有相类似的效果。
另外,在集成学习中往往需要训练多个分类器,如果数据的输入特征数目太大,则会严重影响学习性能——而且这种额外的时间开销是不必要的,因此我们可以考虑只选取一部分输入特征作为正式的输入特征,在[10, 1]详细地讨论了各种特征选取的方法,Dietterich等在[1]中指出把特征选取和一般的集成学习算法结合起来以提高集成学习算法的学习规模,文中他们还给出了一些把特征选取跟集成学习结合起来的方法。
四、 集成学习的分析
1、Bias-Variance分解分析
Bias plus Variance分解分析法由[47]提出,在[46]和[10]中对这种分析方法进行了介绍。Bias plus Variance分解分析法把一个基于特定目标函数和训练集规模的分类错误分解成以下三项[46]:
a)一个偏置项(bias):衡量学习到的分类器的平均效果与实际目标函数的差距;
b)一个容差项(variance):衡量各个基本学习器之间的差别;
c)一个衡量使用最优贝叶斯分类器来近似目标函数的时候的最小分类错误程度。
Leo Breiman等认为Bagging和Boosting都能够通过减少容差项来降低错误率[32],而Freund等认为Boosting关注于从分类错误的实例中学习,从而还能够通过减少偏置项来降低错误率[27]。Eric Bauer等还进一步指出不仅Boosting在某些训练集上能够减少偏置项,而且在这些训练集上Bagging也能够减少偏置项[23]。
关于Bias plus Variance分解分析法的更详细的说明可以参考[47, 46, 10]。
2、实验比较
[46, 23, 25]等对各种流行的集成学习方法进行了实验比较,根据实验结果他们指出以下的一些结论:
a)Bagging方法得到的集成分类器几乎总是比单个分类器效果要好;
b)Boosting方法得到的集成分类器的效果可以明显优于Bagging方法得到的分类器和
单个分类器;
c)然而对于某些数据集Boosting的结果有可能比单个分类器的性能还低;
d)使用随机化人工神经网络的初始权值来进行集成的方法往往能够取得和Bagging同
样好的效果;
e)Boosting方法的效果至少有一定程度依赖于数据集,而Bagging方法对数据集的依
赖却没有那么明显。
具体的实验方法和详细实验数据可以参考[46, 23, 25]。
五、 结论
本文介绍了集成学习的基本概念、基本原理和主要的集成学习方法。虽然本文中介绍了不少关于集成学习的情况,但是为免导致本文内容繁杂结构零乱,还有相当多的内容没有覆盖到或者只是简单进行了介绍,关于这些内容更详细的说明可以参考[37, 33, 32, 31, CAR04, ESP04, KSM02]等以及本文后附录的参考文献。
评价集成学习方法的时候一般有三条基本标准[10]:学习精度、学习效率和基本分类器的多样性。前面介绍的Bagging、AdaBoost、随机扰动等方法都是目前集成学习中非常常用并且被实践证明有效的方法,基于决策树或者是人工神经网络的集成学习更是被应用到各种
场合。
集成学习现在还是机器学习中一个热门的研究方向,诸如AdaBoost等集成学习方法背后的具体机理,如何提高集成学习的学习效果,如何提高集成学习解决问题的规模,各种集成学习方法之间的具体关系,集成学习和数据复杂性之间的关系等等都是尚未完全解决的问题[1, 9, 2, 30, 16, 5]。
六、 参考文献
[1] T.G. Dietterich. Machine Learning Research: Four Current Directions. AI Magazine, 18(4):97--136, 1997
[2] Angluin, D. (1992). Computational learning theory: survey and selected bibliography. Proceedings of the twenty-fourth annual ACM symposium on Theory of computing (pp. 351--369). New York: ACM Press.
[3] Thomas G. Dietterich. Machine Learning. ACM Computing Surveys, 28(4es), December 1996. Available on the World-Wide Web at
https://www.doczj.com/doc/1e12975959.html,/pubs/citations/journals/surveys/1996-28-4es/a3-dietterich/
[4] Eric M., Dennis D.: Machine Learning for Science: State of the Art and Future Prospects. Science, Vol.293, 2001. pp2051-2055.
[5] Thomas G.D.: Fundamental Experimental Research in Machine Learning. Available at https://www.doczj.com/doc/1e12975959.html,/~tgd/publications/
[6] Tom M. Mitchell: Machine Learning. McGraw Hill, 1997.
[7] Thomas G. Dietterich. Ensemble learning. In The Handbook of Brain Theory and Neural Networks, Second Edition, 2002.
[8] T.G. Dietterich. Ensemble Methods in Machine Learning. In Multiple Classier Systems, Cagliari, Italy, 2000.
[9] G. Valentini and F. Masulli, "Ensembles of learning machines," in Neural Nets WIRN Vietri-02, Series Lecture Notes in Computer Sciences, M. Marinaro and R. Tagliaferri, Eds.: Springer-Verlag, Heidelberg (Germany), 2002,. Invited Review.
[10] ShiXin Yu: Feature Selection and Classifier Ensembles: A Study on Hyperspectral Remote Sensing Data (2003) Available at
http://143.129.203.3/visielab/theses/shixin/thesis_yu.pdf
[11] H.S. Seung, M. Opper, and H. Sompolinsky. Query by committee. In Proceedings of the Fifth Workshop on Computaional Learning Theory, pages 287--294, San Mateo, California, 1992. Morgan Kaufmann.
[12] Kittler, J., Hatef, M., Duin, R. P., and Matas, J. 1998. On Combining Classifiers. IEEE Trans. Pattern Anal. Mach. Intell. 20, 3 (Mar. 1998), 226-239.
[13] Wolpert, D.H. (1992), Stacked Generalization, Neural Networks, Vol. 5, pp. 241-259, Pergamon Press.
[14] Ricardo V., Youssef D.: A perspective view and survey of meta-learning. Artificial Intelligence Review, 18(2):77–95, 2002.
[15] William W. Cohen, Vitor R. Carvalho: Stacked Sequential Learning. IJCAI 2005: 671-676
[16] Dennis Bahler and Laura Navarro. Methods for Combining Heterogeneous Sets of Classifiers. In 17th Natl. Conf. on Artificial Intelligence (AAAI), Workshop on New Research Problems for Machine Learning, 2000.
[17] Kearns, M., & Mansour, Y. (1996). On the boosting ability of top-down decision tree learning algorithms. In Proceedings of the Twenty-Eighth Annual ACM Symposium on the Theory of Computing.
[18] Z.-H. Zhou, J. Wu, and W. Tang. Ensembling Neural Networks: Many Could Be Better than All. Artificial Intelligence, 2002, 137(1-2): 239-263.
[19] Z.H. Zhou, J.Wu, W.Tang, and Z.Q. Chen. Selectively Ensembling Neural Classifiers. In International Joint Conference on Neural Networks, volume 2, 2002.
[20] Hansen, L. K. and Salamon, P. 1990. Neural Network Ensembles. IEEE Trans. Pattern Anal. Mach. Intell. 12, 10 (Oct. 1990), 993-1001.
[21] Breiman, L. (1996a), Bagging Predictors, Machine Learning, Vol. 24, No. 2, pp. 123-140.
[22] Dietterich, T. G. (2000). An Experimental Comparison of Three Methods for Constructing Ensembles of Decision Trees: Bagging, Boosting, and Randomization. Machine Learning, 40, 139--157.
[23] E. Bauer and R. Kohavi. An Empirical Comparison of Voting Classification Algorithms: Bagging, Boosting, and Variants. To appear in Machine Learning (available at: https://www.doczj.com/doc/1e12975959.html,/ronnyk/vote.ps.gz), 1998.
[24] Oza, N. C. and Russell, S. 2001. Experimental comparisons of online and batch versions of bagging and boosting. In Proceedings of the Seventh ACM SIGKDD international Conference on Knowledge Discovery and Data Mining (San Francisco, California, August 26 - 29, 2001). KDD '01. ACM Press, New York, NY, 359-364.
[25] Richard Maclin and David Opitz. An empirical evaluation of bagging and boosting. In Proceedings of the Fourteenth National Conference on Artificial Intelligence, pages 546-551, 1997.
[26] Robert E. Schapire. The Strength of Weak Learnability. Machine Learning,
5(2):197--227, 1990.
[27] Freund, Y. & R.E. Schapire (1996), Experiments with a New Boosting Algorithm, in Proceedings of the Thirteenth International Conference on Machine Learning, pp.
148156, Morgan Kaufmann.
[28] R. E. Schapire. The Boosting Approach to Machine Learning: An Overview. In MSRI Workshop on Nonlinear Estimation and Classification, Berkeley, CA, Mar. 2001. See https://www.doczj.com/doc/1e12975959.html,/who/cocteau/nec/ and
https://www.doczj.com/doc/1e12975959.html,/~schapire/boost.html.
[29] Y. Freund and R. Schapire, Discussion of the Paper ‘Arcing Classifiers’ by Leo Breiman, The Annals of Statistics, vol. 26, no. 3, pp. 824-832, 1998.
[30] Y. Freund and R. Schapire. A Short Introduction to Boosting, J. Japan. Soc. for Artif. Intel. 14(5) (1999), 771-780. 11
[31] Breiman, L. (1998). Arcing Classifiers. The Annals of Statistics, 26(3), 801--849.
[32] Breiman,L. (1996) "Bias, Variance, and Arcing Classifiers", Technical Report 460, Statistics Department, University of California
[33] Alexey T., Mykola P., Padraig C.: Sequential Genetic Search for Ensemble Feature Selection. In Proceedings of the Nineteenth International Joint Conference on Artificial Intelligence (IJCAI-05)
[34] Hiroshi Mamitsuka. "Empirical Evaluation of Ensemble Feature Subset Selection Methods for Learning from a High-Dimensional Database in Drug Design," bibe, p. 253, Third IEEE Symposium on BioInformatics and BioEngineering (BIBE'03), 2003.
[35] Thomas G. Dietterich and Ghulum Bakiri. Solving Multiclass Learning Problems via Error-Correcting Output Codes. Journal of Artificial Intelligence Research, 2:263--286, January 1995.
[36] Xu, L., et al, Methods of Combining Multiple Classifiers and Their Applications to Handwriting Recognition, IEEE Transactions on Systems, Man and Cybernetics (1992), May/June.
[37] Al-Ani, A. and Deriche, M. (2002) "A New Technique for Combining Multiple Classifiers using The Dempster-Shafer Theory of Evidence", JAIR, Volume 17, pages 333-361.
[38] K. Chen, L. Wang, and H. Chi. Methods of combining multiple classifiers with different features and their applications to text-independent speaker identification. Int. J. of Pattern Recognition and Artificial Intelligence, 1997.
[39] M. Kamel and N. Wanas, "Data Dependence in Combining Classifiers", Multiple Classifier Systems, 4th international workshop, MCS2003.
[40] Saso D?eroski, Bernard ?enko: Is Combining Classifiers with Stacking Better than Selecting the Best One? Machine Learning, Volume 54 , Issue 3, Pages: 255 - 273 , 2004
[41] Zhipeng Xie, Hsu, W., Li Lee, M.: Mode committee: a Novel Ensemble Method by
Clustering and Local Learning. Tools with Artificial Intelligence, 2004. ICTAI 2004. 16th IEEE International Conference on 15-17 Nov. 2004 Page(s):628 - 633
[42] Ji C. & Ma S. (1997), Combinations of Weak Classifiers. IEEE Transaction on Neural Networks, 8(1):32--42.
[43] Alan Fern and Robert Givan. Online Ensemble Learning: An Empirical Study. In Proceedings of the Seventeenth International Conference on Machine Learning, 2000.
[44] Tsymbal, A., Puuronen, S.: Bagging and Boosting with Dynamic Integration of Classifiers, Principles of Data Mining and Knowledge Discovery, Proc. PKDD 2000.
[45] Bennett, K. P., Demiriz, A., and Maclin, R. 2002. Exploiting unlabeled data in ensemble methods. In Proceedings of the Eighth ACM SIGKDD international Conference on Knowledge Discovery and Data Mining (Edmonton, Alberta, Canada, July 23 - 26, 2002). KDD '02. ACM Press, New York, NY, 289-296.
[46] Opitz, D. and Maclin, R. "Popular Ensemble Methods : an Empirical Study". J. Art. Intell. Research, 11, 169-198,1999.
[47] S. Geman, E. Bienenstock, and R. Doursat. 1992. Neural networks and the bias/variance dilemma. Neural Computation, 4:1--58.
[48] Esposito, R., Saitta, L.: A Monte Carlo Analysis of Ensemble Classification. In Proc. 23th International Conference on Machine Learning, Morgan Kaufmann (2004)
[49] YongSeog Kim, Street, W.N., Menczer, F.: Meta-evolutionary ensembles. Neural Networks, 2002. IJCNN '02. Proceedings of the 2002 International Joint Conference on Volume 3, 12-17 May 2002 Page(s):2791 - 2796
[50] Nigel Duffy, David P. Helmbold: Boosting Methods for Regression,
[51] Dong, Y. and Han, K. 2005. Boosting SVM classifiers by ensemble. In Special interest Tracks and Posters of the 14th international Conference on World Wide Web (Chiba, Japan, May 10 - 14, 2005). WWW '05. ACM Press, New York, NY, 1072-1073.
[52] Fürnkranz, J. 2002. Pairwise Classification as an Ensemble Technique. In Proceedings of the 13th European Conference on Machine Learning (August 19 - 23, 2002). T. Elomaa, H. Mannila, and H. Toivonen, Eds. Lecture Notes In Computer Science, vol. 2430. Springer-Verlag, London, 97-110.
[53] Miller, D.J., Lian Yan: Some Analytical Results on Critic-Driven Ensemble Classification. Neural Networks for Signal Processing IX, 1999. Proceedings of the 1999 IEEE Signal Processing Society Workshop 23-25 Aug. 1999 Page(s):253 - 262.
[54] R?tsch, G., Onoda, T., and Müller, K. 2001. Soft Margins for AdaBoost. Mach. Learn. 42, 3 (Mar. 2001), 287-320.
[55] N. Ueda, Optimal Linear Combination of Neural Networks for Improving Classification Performance, IEEE Transactions on Pattern Analysis and Machine Intelligence 22 (2000): 207-215.
[56] A. Krogh and J. Vedelsby. "Neural Network Ensembles, Cross Validation and Active Learning". In D.S. Touretzky G. Tesauro and T. K. Leen, editors, Advances in Neural Information Processing Systems, volume 7, pages 231--238. The MIT Press, 1995.
[57] Oliveira, L.S., Sabourin, R., Bortolozzi, F., Suen, C.Y.: Feature selection for ensembles:a hierarchical multi-objective genetic algorithm approach. In Proceedings of Seventh International Conference on Document Analysis and Recognition, 2003. pp. 676- 680.
[58] Y. Crammer and Y. Singer. On the learnability and design of output codes for multiclass problems. In Proceedings of thr Thirteenth Annual Conference on Computational Learning Theory, 2000.
[59] Huang, K., Yang, H., King, I., and Lyu, M. R. 2004. Learning large margin classifiers locally and globally. In Proceedings of the Twenty-First international Conference on Machine Learning (Banff, Alberta, Canada, July 04 - 08, 2004). ICML '04, vol. 69. ACM Press, New York, NY, 51.
[60] J. Chan, C. Huang and R. Defries "Enhanced algorithm performance for land cover classification from remotely sensed data using bagging and boosting," IEEE Transactions of Geoscience and Remote Sensing, vol. 39, pp. 693-695, 2001.
[61] Jin, R., Huan Liu: A Novel Approach to Model Generation for Heterogeneous Data Classification. The Nineteenth International Joint Conference on Artificial Intelligence ( IJCAI 2005 )Edinburgh, Scotland, 30 July - 5 Aug., 2005.
[62] Caruana, R., Niculescu-Mizil, A., Crew, G., and Ksikes, A. 2004. Ensemble selection from libraries of models. In Proceedings of the Twenty-First international Conference on Machine Learning (Banff, Alberta, Canada, July 04 - 08, 2004). ICML '04, vol. 69. ACM Press, New York, NY, 18.
[63] M.T. Rosenstein, Z. Marx, L.P. Kaelbling, and T.G. Dietterich. To appear, NIPS 2005 Workshop on Inductive Transfer: 10 Years Later, 2005.
[64] Blum, A., & Mitchell, T. (1998). Combining labeled and unlabeled data with co-training.
[65] Opitz, D. submitted. Feature selection for ensembles. In Proceedings of the Sixteenth National Conference on Artificial Intelligence. Randic, M. 1975. On characterization of molecular branching. Journal of American Chemical Society 97:6609--6615.
[66] Prem Melville and Raymond J. Mooney: Diverse Ensembles for Active Learning. Proceedings of the 21st International Conference on Machine Learning (ICML-2004), pp. 584-591, Banff, Canada, July 2004.
[67] Prem Melville: Creating Diverse Ensemble Classifiers. Ph.D. proposal, Department of Computer Sciences, University of Texas at Austin, October 2003. 54 pages. Also appears as Technical Report UT-AI-TR-03-306, Artificial Intelligence Lab, University of Texas at Austin, December 2003.
[68] Carlos H.E.,Mercedes F.R., Mamen O.G.: A comparison of ensemble methods for Multilayer Feedforward networks. In Proc. of International Joint Conference On Neural Networks (IJCNN'2003). USA: 20-07-2004
[69] Alexander B., Victor E., Eugene T.: Boosting Flexible Learning Ensembles with Dynamic Feature Selection. NIPS2003. Available at
https://www.doczj.com/doc/1e12975959.html,/isabelle/Projects/NIPS2003/.
[70] Isabelle A., Stephan B.: Ranking and Selection of Cases with Decision Trees:
a Geometric Method that Preserves Intelligibility. In Proceedings of the Nineteenth International Joint Conference on Artificial Intelligence (IJCAI-05)
[71] Hema R., Omid M., Rosie J.: InterActive Feature Selection. In Proceedings of the Nineteenth International Joint Conference on Artificial Intelligence (IJCAI-05)
[72] Peter F., Shaomin W.: Repairing Concavities in ROC Curves. In Proceedings of the Nineteenth International Joint Conference on Artificial Intelligence (IJCAI-05)
[73] Jonathan L., Tanzeem C., Nicky K., Gaetano B., Blake H.: A Hybrid Discriminative: Generative Approach for Modeling Human Activities. In Proceedings of the Nineteenth International Joint Conference on Artificial Intelligence (IJCAI-05)
[74] Shay C., Eytan R., Gideon D.: Feature Selection Based on the Shapley Value.In Proceedings of the Nineteenth International Joint Conference on Artificial Intelligence (IJCAI-05)
[75] Yuhong G., Russ G., Dale S., Learning Coordination Classifiers. In Proceedings of the Nineteenth International Joint Conference on Artificial Intelligence (IJCAI-05)
[76] Meir R., Ratsch G.: An Introduction to Boosting and Leveraging. LECTURE NOTES IN ARTIFICIAL INTELLIGENCE 2600: 118-183, 2002.
[77] 马少平, 朱小燕: 人工智能. 清华大学出版社, 2004.
监督学课程综述 作者:周保同 学校:安徽电大合肥分校 专业:10春-行政管理(专科) 学号:1034001417136 指导教师:赵立锦 2012年5月
目录 目录 (1) 内容摘要 (2) 前言 (2) 一、本课主要内容和基本原理 (2) 二、基本原理应用 (3) 三、学习体会及收获 (4) 结束语 (5) 参考文献 (5)
监督学课程综述 内容摘要 监督学所要讲解的主要内容包括以下几个方面:监督学概述、监督思想与理论、中国监察制度的演进、当代中国监督运行机制等,还包括各类机关的监督。这些机关有人民代表大会、检察机关、人民法院、人民政府等。监督学则是从防范公共权力滥用的视角来研究公共权力。监督学主要是讲解与监督相关的一些理论、思想和制度等。他还是研究监督历史、方式与方法,并揭示其发展规律的门综合性科学。监督学的研究涉及政治学、行政学、法学、管理学和经济学等多学科的理论与方法。这就决定了它是一门综合性、边缘性和交叉性的学科。同时,从理论上深刻了解政府决策失误、不依法行政的制度原因及其危害性,能够从监督的视角提出完善我国廉政监督与勤政监督的政策性建议与制度构想。 关键词:监督学监察廉政 前言 监督学是指司法机关、社会组织、和公民以及专门的监督机关,依法对政府和行政人员所进行的以验证他们是否履行职责行为的合法性、公平性和有效性的监察。通过国家监督权、公民权利和社会道德对公共权力的制约是监督学的实质。由此,把握公共权力的来源、特点和运行机制是是学好监督学的关键。同时,监督学又从系统性的角度拓展了刑法、行政法调整的空间。监督学与刑法、行政法具有很大的互补性。刑法与行政法是监督活动的重要依据和实现手段,也是监督工作法治化的体现。如职务犯罪的认定是刑法的重要内容,同时也是监督学研究的对象;对行政行为的司法审查是行政监督的重要方式。监督制度的重要价值以及监督实践的客观需要,不断地推动着监督学学科的迅速发展,自我丰富和自我创新;而监督学学科体系的日臻完善,又为监督制度的法治化、规范化和科学化,提供了强有力的理论支撑和方法指引。监督学与行政学有交互,但是它的范围要远远大于行政学研究的范围。另外,构建完善的行政管理体系,强化依法行政的理念,提升政府的行政效能,是实现有效监督的重要路径,监督机制是行政管理过程中的重要环节。 一、本课主要内容和基本原理 1. 监督学概述:了解监督与腐败的涵义与特征。明白监督的功能主要包含四个:校正功能、制约功能、预防功能和反馈功能。监督的基本原则是依法监督原则、独立监督原则、全面监督原则、分类监督原则和过程监督原则。其中还要学习监督学的研究对象和其与其它相关学科的关系以及其现状。 2.监督思想与监督理论:中国古代与近代的监督思想、当代中国的监督思想、国外监督
机器视觉技术发展现状 人类认识外界信息的80%来自于视觉,而机器视觉就是用机器代替人眼来做 测量和判断,机器视觉的最终目标就是使计算机像人一样,通过视觉观察和理解 世界,具有自主适应环境的能力。作为一个新兴学科,同时也是一个交叉学科,取“信息”的人工智能系统,其特点是可提高生产的柔性和自动化程度。目前机器视觉技术已经在很多工业制造领域得到了应用,并逐渐进入我们的日常生活。 机器视觉是通过对相关的理论和技术进行研究,从而建立由图像或多维数据中获机器视觉简介 机器视觉就是用机器代替人眼来做测量和判断。机器视觉主要利用计算机来模拟人的视觉功能,再现于人类视觉有关的某些智能行为,从客观事物的图像中提取信息进行处理,并加以理解,最终用于实际检测和控制。机器视觉是一项综合技术,其包括数字处理、机械工程技术、控制、光源照明技术、光学成像、传感器技术、模拟与数字视频技术、计算机软硬件技术和人机接口技术等,这些技术相互协调才能构成一个完整的工业机器视觉系统[1]。 机器视觉强调实用性,要能适应工业现场恶劣的环境,并要有合理的性价比、通用的通讯接口、较高的容错能力和安全性、较强的通用性和可移植性。其更强调的是实时性,要求高速度和高精度,且具有非接触性、实时性、自动化和智能 高等优点,有着广泛的应用前景[1]。 一个典型的工业机器人视觉应用系统包括光源、光学成像系统、图像捕捉系统、图像采集与数字化模块、智能图像处理与决策模块以及控制执行模块。通过 CCD或CMOS摄像机将被测目标转换为图像信号,然后通过A/D转换成数字信号传送给专用的图像处理系统,并根据像素分布、亮度和颜色等信息,将其转换成数字化信息。图像系统对这些信号进行各种运算来抽取目标的特征,如面积、 数量、位置和长度等,进而根据判别的结果来控制现场的设备动作[1]。 机器视觉一般都包括下面四个过程:
工业机器人文献综述 生产力在不断进步,推动养科技的进步与革新,以建立更加合理 的生产关系。自工业革命以来,人力劳动己经逐渐被机械所取代,而这种变革为人类社会创造出巨大的财富,极大地推动了人类社会的进步时至今天,机电一体化,机械智能化等技术应运而生并己经成为时代的主旋律。 1.工业机器人的发展: 1.1 机器人概念的诞生 机器人技术一词虽然出现的较晚,但这一概念在人类的想象中却早已出现。自古以来,有不少科学家和杰出工匠都曾制造出具有人类特点或具有动物特征的机器人雏形。我国西周时期的能工巧匠就研制出了能歌善舞的伶人,这是我国最早的涉及机器人概念的文章记录,此外春秋后期鲁班制造过一只木鸟,能在空中飞行,体现了我国劳动人民的智慧。机器人一词由捷克作家--卡雷尔.恰佩克在他的讽刺剧《罗莎姆的万能机器人》中首次提出,剧中描述了一机器奴仆Robot。此次Robot被沿用下来,中文译成机器人。1942年美国科幻作家埃萨克.阿西莫夫在他的科幻小说《我.机器人》中提出了“机器人三大定律”,这三大定律后来成为学术界默认的研发原则。现代机器人出现于20世纪中期,当计算机技术出现,电子技术的进步,数控机床的出现及与机器人相关的控制技术和零件加工技术的成熟,为现代机器人的发展打下了基础。 1.2 国内机器人的发展史 在我国目前采用工业机器人的行业主要有汽车行业、摩托车、电 器、工程机械、石油化工等行业。我国作为亚洲第三大的工业机器人需求国,对于工业机器人的需求量在逐年增加,从而吸引了大批工业机器人的制造商,加快了我国工业机器人技术的发展第一阶段是20世纪80年代,我国为t跟踪国际机器人技术的道路,当时以原机械工业部为主,航天工业部等部门联合组织国内的相关研究单位开展了工业机器人的研究,先后推出了弧焊、点焊、喷漆等多种工业机器人。直到90年代,通过国家863计划等的K77,我国具备t独!)设计不}}生产工业机器人的能力,培养了一批高水平的研究生产队伍进入21世纪,中国的工业机器人发展进入t一个崭新的阶段,其中最大的特点是以企业为主体,以市场为导向、赢利为目标的机器人产业开发群体止在形成。尽管国外大的工业机器人公司为了占领中国不断扩大的市场,加大了其在中国的经销力度,但是中国的机器人企业以自己独有的市场信息优势、售前售后的服}}c势、针对中国企业的工艺特点的专门化设计优势努力争取自己的市场地位随养全球经济的一体化发展,世界制造中心向中国转移的趋势,中国工业机器人的产业会快速的发展起来,特别重要的是研制单位必须和需求紧密结合,让机器人走进工厂,实现真止的产业化。 经过20多年的探索,我国的工业机器人自动化技术取得t长足的发展,但是与世界发达国家相比,还有不小的差距;机器人应用工程起步也较晚,应用领域窄,生产线系统技术落后随养我国制造业-尤其是汽车行业的发展,对工业机器人的需求日益增长,工业机器人的拥有量远远不能满足需求量。尤其是基础零部件和元器件生产和制造、机器人可靠性以及成木等问题,都存在很多问题。尤其在大负载工业机器人方而,不仅产品长期大量依靠从国外引进,在维护、更新改造方而对国外的依赖也相当严重。 1.3国内外工业机器人的发展方向
安徽广播电视大学专科毕业论文 《公共行政学》课程综述 初稿 姓名:田露露 分校:宿州分校 专业:行政管理专科 年级:17春 学号: 指导老师: 日期:2019年04月
《公共行政学》课程综述 目录 内容摘要------------------------------------------------第3页 一、公共行政学的主要内容-----------------------------第3页 二、理论联系实际--------------------------------------第4页 三、学习体会-------------------------------------------第5页 四、结束语----------------------------------------------第6页参考文献-------------------------------------------------第7页
内容摘要:公共行政学,产生于19世纪末20世纪初的美国,是现代工业的产物。在我国公共行政就是政府行政,而行政,顾名思义,就是指政府处理政务,也就是处理社会公共事务。公共行政学就是一门研究公共行政组织及对公共事务管理活动的科学。公共行政是对国家的治理,就是治国安邦,一个国家的公共行政决定了一个国家的治理水平,善政才有善治,也是为国家的政治,经济,文化和社会发展提供保证,它的核心问题是如何管理好国家,如何使人民安居乐业,如何使社会快速地发展,并依法处理政务的有效性、公平性、民主性,这正是公共行政学所要研究的内容。它包含了:行政领导、行政决策等等一些内容。行政领导是指在公共组织中,领导个人或领导集体,依法行使行政权力,运用各种方法和手段,有效地影响部属,以实现行政目标的行为过程。行政决策是指在处理政务时,领导者从公共利益出发,本着公平、公正的原则依照法律和有关规定而做出决定的行政行为。 关键词:公共行政学、政府、行政、公共行政 一、课程主要内容 《公共行政学》主要讲述了行政组织、行政决策、行政监督等内容。其中还较为系统地讲授和分析公共行政学含义、形成与发展的过程、公共行政职能、公共行政组织、公共行政领导、公共行政决策、公共行环境、公共行政监督等发展的趋势和内容。课程立足于理论分析的同时还注重紧密联系实际,突出了学科应用性的特点。 公共行政就是政府行政,是以国家行政机关为主的公共管理组织,是国家行政机构依法管理社会公共事务的有效活动,具有公共性.政治性.法制性.民主性.公平性.和高效性的特点。公共行政与行政环境的关系是辨证的关系,公共行政必须适应行政环境,行政环境制约、决定公共行政;公共行政对行政环境有改造作用。虽然一般行政环境即自然地理、政治、经济、文化和国际环境对公共行政的作用十分重要的,但是,具体环境的作用也不容忽视。组织环境组织文化对公共组织形成团体凝聚力有十分重要的作用。
国内外相关技术的现状发展趋势世界上许多地区正面临着最严重的缺水。据世界银行的统计,全球80%的国家和地区都缺少民用和工业用淡水。随着资源成本不断上升和环保意识逐渐增强,许多企业开始运用绿色技术,降低碳排放,尽量减少废物产生。其中水处理技术就是其中非常重要的一项绿色技术。 根据联合国统计,到2025年,三分之二的世界人口可能会面临水资源短缺,因此水处理技术将会越来越得到重视,这包括了高效率的水资源管理和污水处理。例如:在北美尤其在加拿大,水管理及污水处理设施的面临的问题十分急切。63%的目前运行的设施都在超期运行,他们的平均运行时间已经达到18.3年。其中52%污水处理设施在超期运行。在美国的干旱地区,对海水淡化技术的需求越来越高。海水淡化技术主要局限在于效率,而随着淡水的短缺,这些局限逐渐被淡化和忽视。水处理技术的发展拥有巨大的前景,许多国家都在实施水处理的政策和项目。根据全球知名增长咨询公司的预测,至2010年,全球水资源管理和污水处理技术市场规模预计将达到3,500亿美元。 目前先进的水管理和污水处理技术及其发展趋势包括了循环用水、反渗透海水淡化和臭氧化等。例如,反渗透海水淡化技术正在迅速占领的大型设施市场,而这一领域过去主要以热工过程设备为主。
处理效率的提升和渗透膜价格的回落,促使反渗透海水淡化市场在过去5年中迅速发展,现在应用反渗透海水淡化技术的已不再是小规模的工厂,大型反渗透海水淡化厂已是司空见惯。 在污水处理方面,澳大利亚的研究人员在生物发电领域提出了一种新的旋转生物电化学接触器,这项技术能够将已经运用于污水处理行业30年的旋转生物污水处理技术的效率提高15%;此外,一种能够处理高污染废水的技术也已经问世,这种技术能够处理污染物浓度超过300,000ppm的污水,而处理成本仅有原先通过储存和化学处理方法的十分之一。这种技术目前被认为是最简单、最易于使用及经济的处理技术. 中国目前同样也面临巨大的淡水短缺和水污染的问题。作为一个人均拥有水资源量最小的国家,必须采取措施以避免未来严重危机的发生。中国北方缺水问题极度严重,因此国家启动了浩大的“南水北调”工程,整个工程耗资达到几十亿美元,预计2050年建成。污水问题同样困扰着中国,估计有3亿人口的饮用水是被污染的。2004年至2008年,污水排放量年增长率达到18%,从482亿吨增长至572亿吨。预计在2010年,中国的污水排放将达到640亿吨。中国持续的工业化、城市化进程和经济的快速增长,是导致污水排放量连年上升的主要原因;而与此相对的是,中国的污水处理厂却基本上未能实现满负荷的运行。以2008年为例,中国污水处理厂的处理污
《监督学》课程综述 摘要 监督学是行政学专业十分重要的一门专业课程。本文将对这门课程的主要内容进行综述,并将结合自己的工作实践,将其知识应用到本职工作中得出了很深刻体会。在这一过程中认识到进一步完善具有中国特色的监督制度,充分发挥监督机关在推进廉政勤政建设中的职能作用是构建我国反腐倡廉战略体系的关键所在。在以后的工作中会将学习到的知识理论全部应用到实践中,更好的提升自己从而更好的为国家和人民服务。此外,通过学习这门课程有了一些深刻的体会和收获。 关键词:监督学;廉政;反腐败
目录 摘要................................................................ I 前言.. (1) 一、《监督学》课程的主要内容 (1) 二、《监督学》理论知识与实际的结合 (2) 三、学习《监督学》这一课程的体会 (3) 参考文献 (4)
前言 我们看一下全书的章节设置及主要内容便知《监督学》这一课程尝试从预防腐败、构建多元化政府模式和发挥多主体监督职能的三维视角,分析把握监督的功能定位,在例行分析监督现状的基础上,从多元监督的全景视角审视其内在的原因,力图揭示监督的内在规律和有效监督的实现路径,提出完善我国监督制度与机制的一些设想。 一、《监督学》课程的主要内容 《监督学》这门课程总共分为十一章,第一章介绍了监督的基本内涵和特征和监督的功能和监督的分类,明确监督与腐败的涵义和特征。讲述了腐败产生的根源与条件从而进一步阐述监督的校正、制约、预防和反馈功能。讲述监督主体与监督客体、监督与被监督关系、监督形式和监督阶段的分类方式。讲述监督的基本原则。第二章监督思想与监督理论,对中外主要监督思想的形成与发展,不同监督理论对监督制度的影响以及监督制度建构的理论基础。讲述中国古代与近代与当代中国的监督思想,以及国外监督思想综述和中外监督思想的比较分析,从人民主权、议行合一、三权分立、利益多元等方面讲述了监督理论。第三章中国监察制度的演进,讲述了中国古代监察机关的领导体制与职权,阐述了中国古代监察制度的特点,对中国近代监察制度从中华民国的监察制度至革命根据地和解放区的监察制度以及当代中国监察制度中香港和台湾澳门地区的监察制度。第四章国外反腐败与监督制度讲述了国际反腐败运动,现状与特点的分析及国际间反腐败合作体系的基本架构。简述了多个国家的监督模式。第五章当代中国监督运行机制,叙述了我国监督运行体系的基本架构,对廉政监督与效能监督的基本内涵和监督制度完善的主要做法加以讲述和说明。从廉政监督的基本架构、基本战略、预警机制、防范机制和问责机制简述了廉政监督的运行机制。对效能监督的运行机制加以说明。第六章人民代表大会的监督:人民代表大会监督概述讲述了人民代表大会监督的涵义和特征、地位和作用还有人民代表大会监督制度的基本架构。对人民代表大会监督的范围、内容与方式详细说明。第七章中国共产党的党内监督,对党内监督进行概述,讲述了党内监督的涵义与性质,党内监督的方式与手段以及党的监督条规建设。对党组织监督的意义和特点。说明了党的纪律检查机关的监督说明:纪检机关的地位与作用、纪检机关的监督对象与内容、纪检机关监督权与监督方式。第八章检察机关的法律监督,简述检察机关在监督体系中的地位与功能,对检察机关监督概述包含了检察机关监督的概念、性质以及内容和方式。对职务犯罪职务犯罪的概念与范围、贪污罪、贿赂罪、挪用公款罪等罪行的认定和侦查监督的主要内容与方式和监督工作的完善。第九章人民法院的审判监督介绍了审判监督的概念和特点以及如何掌握行政诉讼与行政赔偿。对审判监督的概念和特征、功能和方式的概述。还概述了审级监督制度的理论基础、二审监督制度、再审监督制度和死刑复核制度对行政行为的概念与分类,违法与无效行政行为的认定等行政诉讼制度的讲解。第十章各级政府的行政监督,概述了行政监督的概念和特征、对象和范围以及行政监督机关的领导体制和监督对象的法律责任。进一步探讨层级监督的含义和层级存在的问题和制度完善对行政监察制度的概述和审计监督的制度及与其他监督机关的关系,和行政复议制度的说明。第十一章社会民主监督:概述了社会民主监督在国家监督体系中的功能和协
机器视觉的辅助驾驶系统的视频中行人 实时检测识别研究文献综述 1机器视觉发展 国外机器视觉发展的起点难以准确考证,其大致的发展历程是:20世纪50年代提出机器视觉概念,20世纪70年代真正开始发展,20世纪80年代进入发展正轨,20世纪90年代发展趋于成熟,20世纪90年代后高速发展。在机器视觉发展的历程中,有3个明显的标志点,一是机器视觉最先的应用来自“机器人”的研制,也就是说,机器视觉首先是在机器人的研究中发展起来的;二是20世纪70年代CCD图像传感器的出现,CCD摄像机替代硅靶摄像是机器视觉发展历程中的一个重要转折点;三是20世纪80年代CPU、DSP等图像处理硬件技术的飞速进步,为机器视觉飞速发展提供了基础条件。 国内机器视觉发展的大致历程:真正开始起步是20世纪80年代,20世纪90年代进入发展期,加速发展则是近几年的事情。中国正在成为世界机器视觉发展最活跃的地区之一,其中最主要的原因是中国已经成为全球的加工中心,许许多多先进生产线己经或正在迁移至中国,伴随这些先进生产线的迁移,许多具有国际先进水平的机器视觉系统也进入中国。对这些机器视觉系统的维护和提升而产生的市场需求也将国际机器视觉企业吸引而至,国内的机器视觉企业在与国际机器视觉企业的学习与竞争中不断成长。 未来机器视觉的发展将呈现下列趋势: (1)技术方面的趋势是数字化、实时化、智能化 图像采集与传输的数字化是机器视觉在技术方面发展的必然趋势。更多的数字摄像机,更宽的图像数据传输带宽,更高的图像处理速度,以及更先进的图像处理算法将会推出,将会得到更广泛的应用。这样的技术发展趋势将使机器视觉系统向着实时性更好和智能程度更高的方向不断发展。 (2)产品方面:智能摄像机将会占据市场主要地位 智能摄像机具有体积小、价格低、使用安装方便、用户二次开发周期短的优点,非常适合生产线安装使用,越来越受到用户的青睐,智能摄像机所采用的许多部件与技术都来自IT行业,其价格会不断降低,逐渐会为最终用户所接受。因此,
重庆理工大学 毕业设计(论文)文献综述题目机器人行走机构设计 二级学院重庆汽车学院 专业机械设计制造及其自动化班级 姓名学号 指导教师系主任 时间
评阅老师签字:
机器人行走机构 吴俊 摘要:行走机器人是机器人学中的一个重要分支。行走机构可以是轮式的、履带式的 和腿式的等,能适应地上、地下、水中、空中、宇宙等作业环境的各种移动机构。本 文从国内外的研究状况着手,介绍了行走机器人的发展历史,研究现状和发展趋势。本文还介绍了国内最新的研究成果。 关键字:机器人行走机构发展现状应用 Keyword:robot travelling mechanism developing current situation application 一,前言 行走机器人是机器人学中的一个重要分支。关于行走机器人的研究涉及许多方面,首先,要考虑移动方式,可以是轮式的、履带式的和腿式的等;其次,必须考虑 驱动器的控制,以使机器人达到期望的行为;第三,必须考虑导航或路径规划。因此,行走机器人是一个集环境感知、动态决策与规划、行为控制与执行等多种功能于一体 的综合系统。机器人的机械结构形式的选型和设计,应该根据实际需要进行。在机器 人机构方面,应当结合机器人在各个领域及各种场合的应用,开展丰富而富有创造性 的工作。对于行走机器人,研究能适应地上、地下、水中、空中、宇宙等作业环境的 各种移动机构。当前,对足式步行机器人、履带式和特种机器人研究较多,但大多数 仍处于实验阶段,而轮式移动机器人由于其控制简单,运动稳定和能源利用率高等特点,正在向实用化迅速发展,从阿波罗登月计划中的月球车到美国最近推出的NASA 行星漫游计划中的六轮采样车,从西方各国正在加紧研制的战场巡逻机器人、侦察车 到新近研制的管道清洗检测机器人,都有力地显示出行走机器人正在以其使用价值和 广阔的应用前景而成为智能机器人发展的方向之一。 二、课题国内外现状 多足步行机器人是一种具有冗余驱动、多支链、时变拓扑运动机构, 是模仿多足 动物运动形式的特种机器人, 是一种足式移动机构。所谓多足一般指四足及四足其以上, 常见的多足步行机器人包括四足步行机器人、六足步行机器人、八足步行机器人等。 步行机器人历经百年的发展, 取得了长足的进步, 归纳起来主要经历以下几个 阶段: 第一阶段, 以机械和液压控制实现运动的机器人。 第二阶段, 以电子计算机技术控制的机器人。 第三阶段, 多功能性和自主性的要求使得机器人技术进入新的发展阶段。 三、研究主要成果 国内多足步行机器人的研究成果[1]: 1991年,上海交通大学马培荪等研制出JTUWM[1]系列四足步行机器人。JTUWM-III是模仿马等四足哺乳动物的腿外形制成,每条腿有3个自由度,由直流伺服
天津广播电视大学13秋行政管理专业专科 毕业论文 《公共行政学》课程综述 姓名:陈晨 学号:1312001450984 分校:红桥分校 专业:行政管理 指导老师:王恕 时间: 2015年10月
目录 一、内容摘要 (1) 正文: 二、《公共行政学》的主要内容和基本原理介绍 (2) 三、行政监督原理在实践中的运用 (4) 四、学习体会和收获 (5) 参考文献 (7)
内容摘要 公共行政学,在我国也称为行政管理学或是行政学,是一门研究公共行政组织及其对公共事务管理活动的科学。公共行政学这门课程是政治学、管理学、法学、经济学、社会学、心理学和人类文化学等学科的交叉学科。学习公共行政学能够让我们提高国家各级行机构的效率和能量,使国家的行政活动走向科学、规范、民主与法制,尽快把我国建设成为现代化的强国。
一、《公共行政学》的主要内容和基本原理介绍 公共行政学全书共分为十六章内容。 第一章介绍公共行政含义,指公共组织(政府)的行政,即公共组织对社会公共事务的管理。具有公共性、公共性、法则性、民主性、公平性、高效性特点的交叉与综合性学科。 第二章主要介绍行政环境是指直接或间接影响公共行政的各种内外部因素的总和。它具有复杂性、约束性、多样性、和不稳定性,的特点。行政环境与公共行政的关系是辨证的关系,公共行政必须适应行政环境,行政环境制约、决定公共行政;公共行政对行政环境有改造作用。虽然一般行政环境即自然地理、政治、经济、文化和国际环境对公共行政的作用是十分重要的,但是,具体环境的作用也不容忽视。组织环境组织文化对公共组织形成团体凝聚力有十分重要的作用。 第三章介绍政府职能的含义.特点和类型。政府职能是指政府在社会中所扮演的角色和所起的作用。政府职能有普遍性.强制性.系统性.不可代替性和服务性等特点。论述政府在资源配置方面失效,以及政府干预的限度。划分了政府职能的类型,论述了政府的基本职能内容。 第四章主要介绍行政体制就是政府体制。它有政治性.稳定性.系统性.滞后性和继承性等特点。行政体制可分为中央政府体制.地方政府体制.中央与地方权利关系体制和行政区划体制。科学的行政体制的作用在于规范公共行政管理,提高行政效率,促进社会全面发展,
采矿工程学科前沿与进展 ——深部技术开采及发展趋势 姓名: 班级:采矿1101班 学号:1111104007
深部技术开采及发展趋势 随着浅部资源的逐渐消耗殆尽,矿产资源开发向深部发展将成为一种趋势。根据矿床开采工作所面临的地压问题,可按开采深度将矿山分为以下几类。 开采深度小于300m,称浅井开采。在此深度内采矿时,一般地压显现不严重,即使发生地压活动,也属静压问题,易于处理。 开采深度300~800m,称为中深井开采。根据矿体赋存条件、矿岩的物理力学性质,在掘进或开采过程中,可能发生轻度岩爆,如岩石弹射等现象。 开采深度超过800m,为深井开采。在此深度内具有二类变形特征的岩石会发生频繁的岩爆,影响作业安全。 与浅井或中深井开采相比,深井(含超深井)开采这一特殊环境将带来一系列安全问题,主要包括岩爆(即在压力作用下,岩石发生爆裂的现象)、高温、采场闭合和地震活动等,其中尤以岩爆为丰要危害。 预计随着浅部资源町供开发量的减少,深部资源勘探技术发展获得更多深部可开采资源,这一比例将会呈逐步减小的趋势。当代露天采矿工艺的技术发展趋势是开采工艺的综合化。采剥工艺的选择,贵在因地制宜。对于范围广阔、能力巨大的大型矿山,针对不同开采深度、不同地段、不同开采对象的特点,采用不同开采工艺,并组成综合工艺,以实现优化开采效果,已成为现代露天矿山的发展趋势。将机械化、自动化、通信、计算机及优化理论等多学科交叉应用,通过研究、开发,实现露天开采生产的自动调度,生产计划和过程的优化,开拓运输系统和采装系统的优化将是露天开采常用的计划、生产管理手段;在未来几年,数字矿山技术将会得到普及。2.2 地下开采工艺地下开采虽然产量比例小,但数量多,西方国家有地下矿 365 座(2002 年数据),其中多为小型但却高效的矿山。尽管如此,许多地下矿山十分巨大并装备有非常精致的设备和较高的自动化水平。对传统主要采矿方法的不断改进是地下开采工艺的发展趋势。如大间距集中化无底柱参数的进一步扩展,充填采矿技术中新的充填材料和充填工艺的研究,自然崩落法技术的完善与应用范围的扩展等等;针对特定矿体改进的采矿技术将会不断出现。由于易采资源耗竭,勘探深度的加深,将越来越多地开采深部矿体和难采矿体,深井开采技术、复杂难采矿体开采技术将是今后几年研究的重点,在理论研究和系统开采技术方面都将取得突破。深井开采的岩爆、矿震、冲击地压等动力灾害是深部开采中面临的突出问题,除此之外,安全技术、地质构造、采场布置与采矿方法、降温与通风、采场支护、超深竖井掘进、钢绳提升和无绳提升等都是深部开采面临的关键问题。 对此,深部开采岩爆、矿震、冲击地压等动力灾害控制、预报与防治技术,深部开采的采、掘技术,深部开采通风与降温技术将在对正在或逐步进行的深井矿山开采技术研究及理论研究的基础上获得快速发展。难采矿开采面临一系列特殊的技术难题。如松散破碎矿体顶板与围岩稳定性控制技术,流砂含水层覆盖的
国开监督学形考 2019年1月国开(中央电大)行管专科《监督学》期末考试试题及答案说明:1.试卷号:2528;2.适用专业及层次:行政管理、专科;3.该课程考试方式为闭卷、考试时间90分钟、形考手段纸质(30%)、终考手段为纸质(70%)。 一、多项选择题1.监督的主要特征是(ABCD)。 A.监督主体的多样性 B.监督对象的特定性 C.监督内容的广泛性 D.监督依据的法定性2.人民代表大会对审判机关和检察机关的执法监督包括以下方面(ABCD)。 A.对审判机关行使职权情况进行监督 B.对检察机关行使职权情况进行监督 C.对司法程序进行监督 D.对具体案件进行监督3.党内监备的对象包括(ABCD)。 A.党的各级领导机关 B.党的领导干部 C.党员 D.党的领导机关之外的其他组织4.二审法院审理后,对上诉、抗诉案件,可以有以下几种处理方式(ACD)。 A.裁定驳回上诉、抗诉,维持原判 B.上诉不加刑 C.依法直接改判 D.裁定撤销原判决,发回重审5.社团监督的意义体现在以下方面(ABC)。 A.社团监督是公权力机关外部监督的组成部分 B.社团监督是公民监督的组织化,能更有效地维护公民利益和社会公共利益,更强有力地制约公共权力的行使 C.社团监督中的参与机制可以弥补公权力机关内部监督的局限 D.社团监督可以优化立法二、填空题6.腐败是一种______异化的社会现象。 公权力7.全国人民代表大会常务委员会有权撤销同______和法律相抵触的行政法规。
宪法8.党的地方各级纪律检查委员会在______党的委员会和上级纪律检查委员会双重领导下进行工作。 同级9.______是我国刑事诉讼中一个独立的诉讼阶段,是人民检察院对侦查终结的案件进行全面审查,作出提起公诉或不起诉的审查决定的诉讼活动。 审查起诉10.审判机关的刑事审判监督是指人民法院通过对国家机关及其工作人员在职务行为过程中的犯罪行为予以定罪量刑,从而实现监督______权的目的的一种司法监督形式。 行政11.行政复议职权是基于行政系统内部的______关系而设置的一种职权。 层级监督12.针对法律本身及其在实施过程中出现的不足和问题,政协可以通过形成______案和报告等形式向有关机关特别是立法机关提出建议,要求对宪法和法律进行修正。 建议13.舆论是______思想和意见的公开表达。 公众14.______作为第一部世界性反腐败公约,为反腐败的国际合作提供了法律依据和准绳。 《联合国反腐败公约》15.瑞典的议会监察专员一般从具有杰出法律知识和秉性正直、社会威望较高的无党派人士中选出,只有 ______有权罢免监察专员。 议会三、名词解释16.行政赔偿制度:是指国家行政机关及其工作人员,违法行使职权,侵犯公民、法人和其他组织的合法权益并造成损害,由国家承担责任对受害人予以赔偿的法律制度。 17.舆论监督:是指公民、法人或者其他组织利用言论、出版、新闻等方面的权利对国家机关及其工作人员的活动实施的监督,方式有批评、建议、评论、揭露违法和腐败行为等。随着社会的发展与进
基于机器视觉的工件识别和定位文献综述 1.前言 1.1工业机器人的现状与发展趋势 机器人作为一种最典型的应用范围广、技术附加值高的数字控制装备,在现代先进生产制造业中发挥的作用越来越重要,机器人技术的发展将会对未来生产和社会发展起到强有力的推动作用。《2l 世纪日本创建机器人社会技术发展战略报告》指出,“机器人技术与信息技术一样,在强化产业竞争力方面是极为重要的战略高技术领域。培育未来机器人产业是支撑2l 世纪日本产业竞争力的产业战略之一,具有非常重要的意义。” 研发工业机器人的初衷是为了使工人能够从单调重复作业、危险恶劣环境作业中解脱出来,但近些年来,工厂和企业引进工业机器人的主要目的则更多地是为了提高生产效率和保证产品质量。因为机器人的使用寿命很长,大都在10 年以上,并且可以全天后不间断的保持连续、高效地工作状态,因此被广泛应用于各行各业,主要进行焊接、装配、搬运、加工、喷涂、码垛等复杂作业。伴随着工业机器人研究技术的成熟和现代制造业对自动生产的需要,工业机器人越来越被广泛的应用到现代化的生产中。 现在机器人的价格相比过去已经下降很多,并且以后还会继续下降,但目前全世界范围的劳动力成本都有所上涨,个别国家和地区劳动力成本又很高,这就给工业机器人的需求提供了广阔的市场空间,工业机器人销量的保持着较快速度的增长。工业机器人在生产中主要有机器人工作单元和机器人工作生产线这两种应用方式,并且在国外,机器人工作生产线已经成为工业机器人主要的应用方式。以机器人为核心的自动化生产线适应了现代制造业多品种、少批量的柔性生产发展方向,具有广阔的市场发展前景和强劲生命力,已开发出多种面向汽车、电气机械等行业的自动化成套装备和生产线产品。在发达国家,机器人自动化生产线已经应用到了各行各业,并且已经形成一个庞大的产业链。像日本的FANUC、MOTOMAN,瑞典的ABB、德国的KUKA、意大利的COMAU 等都是国际上知名的被广泛用于自动化生产线的工业机器人。这些产品代表着当今世界工业机器人的最高水平。 我国的工业机器人前期发展比较缓慢。当将被研发列入国家有关计划后,发展速度就明显加快。特别是在每次国家的五年规划和“863”计划的重点支持下,我国机器人技术的研究取得了重大发展。在机器人基础技术和关键技术方面都取得了巨大进展,科技成果已经在实际工作中得到转化。以沈阳新松机器人为代表的国内机器人自主品牌已迅速崛起并逐步缩小与国际品牌的技术差距。 机器人涉及到多学科的交叉融合,涉及到机械、电子、计算机、通讯、控制等多个方面。在现代制造业中,伴随着工业机器人应用范围的扩大和机器人技术的发展,机器人的自动化、智能化和网络化的程度也越来越高,所能实现的功能也越来越多,性能越来越好。机器人技术的内涵已变为“灵活应用机器人技术的、具有实在动作功能的智能化系统。”目前,工业机器人技术正在向智能机器和智能系统的方向发展,其发展趋势主要为:结构的模块化和可重构化;控制技术的开放化、PC 化和网络化;伺服驱动技术的数字化和分散化;多传感器融合技术的实用化;工作环境设计的优化和作业的柔性化以及系统的网络化和智能化等方面。 1.2机器视觉在工业机器人中的应用 工业机器人是FMS(柔性加工)加工单元的主要组成部分,它的灵活性和柔性使其成为自动化物流系统中必不可少的设备,主要用于物料、工件的装卸、分捡和贮运。目前在全世界有数以百万的各种类型的工业机器人应用在机械制造、零件加工和装配及运输等领域,
《公共行政学》课程综述 学校: 姓名: 学号: 班级: 指导教师: 目录 内容摘要 目录 一、公共行政学的主要内容 (3) 二、行政监督原理在实践中的运用 (4) 三、学习体会和收获 (6) 参考文献
《公共行政学》课程综述 内容摘要:(250字左右)………………………………………………… ………………………………………………… 关键词:公共行政学;内容;原理;体会(不超过5个) 公共行政学,在我国也称为行政管理学或是行政学,是一门研究公共行政组织及其对公共事务管理活动的科学。公共行政学这门课程是政治学、管理学、法学、经济学、社会学、心理学和人类文化学等学科的交叉学科。学习公共行政学能够让我们提高国家各级行机构的效率和能量,使国家的行政活动走向科学、规范、民主与法制。 一、公共行政学的主要内容 公共行政学第一章讲述了公共行政的含义。公共行政就是政府行政,具有公共性.政治性.法制性.民主性.公平性.和高效性的特点。第二章主要介绍行政环境是指直接或间接影响公共行政的各种内外部因素的总和。它具有复杂性、约束性、多样性、和不稳定性,的特点。行政环境与公共行政的关系是辨证的关系,公共行政必须适应行政环境,行政环境制约、决定公共行政;公共行政对行政环境有改造作用。虽然一般行政环境即自然地理、政治、经济、文化和国际环境对公共行政的作用是十分重要的,但是,具体环境的作用也不容忽视。组织环境组织文化对公共组织形成团体凝聚力有十分重要的作用。第三章介绍政府职能的含义.特点和类型。政府职能是指政府在社会中所扮演的角色和所起的作用。政府职能有普遍性.强制性.系统性.不可代替性和服务性等特点。论述政府在资源配置方面失效,以及政府干预的限度。划分了政府职能的类型,论述了政府的基本职能内容。第四章主要介绍行政体制就是政府体制。它有政治性.稳定性.系统性.滞后性和继承性等特点。行政体制可分为中央政府
监督学心得体会 篇一:监督学课程综述 范文仅供参考格式。不许抄袭,否则直接判不及格《监督学》课程综述 姓名: 学校: 专业: 11秋专行政 学号:指导教师: 目录 内容摘要 (2) 正文 一、《监督学》的主要内容 (3) 二、理论联系实际 (4) 三、学习体会 (5) 参考文献 (6) 内容摘要 《监督学》介绍了中外监督思想和监督理论,中国监察制度的演进和当代中国的监督运行机制,分别阐述了人民
代表大会监督、中国共产党党内监督、司法机关监督、政府行政监督、社会民主监督等具体监督方式及国外反腐败与监督制度等,旨在为研究和推动我国的民主政治建设打下一定的基础,以达到比较和对照、启发和借鉴的效果。随后,文章论述了协商民主理论对于中国民主政治发展具有的积极推动作用,首先它能推进政治结构分化,提升政治主体能力;其次是扩大公民参与,重塑政治运行过程;再次是有利于推动政治关系和谐。最后,在学习研究的基础上,作者认识到进一步完善具有中国特色的监督制度,充分发挥监督机关在推进廉政勤政建设中的职能作用是构建“标本兼治、综合治理、惩防并举、注重预防”的反腐倡廉战略体系的关键所在。 《监督学》课程综述 一、《监督学》的主要内容 腐败来源于公共权力的滥用,权力本身即倾向于腐败,没有监督的权力则必然产生腐败。人类在社会实践中试图将公共权力置于有效监督之下,从而达到预防和惩治腐败的目的,在这一过程中积累了大量反腐败斗争的成功经验,形成了丰富的监督思想和各类监督理论,如用一种权力制约另一种权力、用公民权利限制政府权力等。 第一章、监督学概述主要谈到了权力的涵义和特征;腐败的涵义、特征与产生根源;监督的涵义和特征;监督的功能主要有:预防功能、制约功能、校正功能、救济功能;监
基于机器视觉的产品识别检测技术研究 摘要:机器视觉检测系统采用CCD照相机将被检测的目标转换成图像信号,传送给图像处理系统,根据像素分布和亮度、颜色等信息,转变成数字化信号,图像处理系统对这些信号进行各种运算来抽取目标特征,如面积、数量、位置,再根据预设的允许度和其他条件输出结果,包括尺寸、个数、合格/不合格、标识有无等,实现自动识别功能。机器视觉的研究是从20世纪60年代中期开始70年代已形成几个重要研究分支:目标制导的图像处理、图像处理和分析的并行运算、序列图像分析和运动参量求值、视觉知识的表示、视觉系统的知识库等。 关键词:机器视觉;CCD相机;图像处理;产品检测。
引言 机器视觉就是用机器代替人眼来做测量和判断,它是一项综合技术,其中包括数字图像处理技术、控制技术、电光源照明技术、光学成像技术、传感技术、模拟与数字视频技术等,机器视觉更强调实用性,要求能够适应工业生产中恶略的环境,要有通用的工业接口。电视摄像技术的成熟与计算机技术的发展使得机器视觉研究成为可能,它作为早期人工智能的一部分,由于技术条件的限制进展缓慢。后来在随着计算机技术的快速发展,机器视觉的研究得到了迅速发展在国外,机器视觉的应用普及主要体现在半导体及电子行业,机器视觉系统在产品检测方面已经得到了广泛的应用。在中国机器视觉技术应用开始与90年代,目前国内机器视觉大多为外国品牌,不过随着机器视觉的应用,国内公司技术上已经逐渐成熟。与此同时,随着配套基础设施建设的完善,技术、资金的积累,各行各业对机器视觉技术的工业自动化、智能化需求开始广泛出现。国内高校校、研究所和企业在这个领域进行了积极探索和大胆尝试,这都将促进工业检测自动化技术向智能化发展。
攀爬机器人文献综述 攀爬机器人文献综述 对攀登机器人结构点性能计算和实验的研究 摘要 本文介绍了并联攀爬机器人性能的运动学和动力学研究,从而避免结构框架上的节点。为了避免结构节点,攀爬并联机器人可以取得某种确定的动作。一系列的动作组合起来,可以方便沿着结构节点的攀登运动。必须对并联攀爬机器人的姿态予以研究,因为在其独特的配置下,姿势能够驱动机器人。此外,需要对执行机构为了避免机构节点而产生的力进行评估。因此本文的目的要表明,Stewart–Gough 并行平台能够作为攀爬机器人,与其他机器人相反,并行攀爬机器人能后轻易而优雅地避免结构节点。为了支持第一部分中描述的模拟结果,实验测试平台已经发展到围绕结构节点对并联攀爬机器人地动力性能进行研究。获得的结果非常有趣,显示了潜在的在工业中使用平行S-G机器人作为攀岩机器人的存在。 关键词:爬壁机器人、动力学、并联机器人、奇点
一简介 当需要在一些危险或者难以到达的地方执行任务时,具有在不同结构上攀爬和滑行能力的机器人是非常重要的,比如在检查和维修金属桥梁、通信天线以及深入核工业结构内部过程中使用的机器人。通常,这些类型的金属结构是由聚合在一起的杆构成,是一种联合机械,每一个都可以描述为棱柱元素变截面和尺寸的扩展。所有这些元素组合产生晶格不同的几何结构,其中结构性因素在不同点的结合称为结构节点。这类结构的尺寸和形状取决于它应用的设计。在这一类型设置中不同任务的机器人化已经被广泛地记载在文献中。在许多情况下,有人提出使用连接机构和多腿机器人来实现位移的随即移动。另外,许多这些机器人是被设计用来在墙壁或管道攀爬和工作。一些建议的解决方案在机械上是非常复杂的,需要在运动控制方面有高水平的发展和阐述。一种用来给双层底部板件焊接的机器人正在研制当中。该型机器人是由一种有选择顺应性装配机器手臂配置的四足机器组成。该机器人通过抓住加强筋移动,但由于其几何结构不能移动通过结构节点。Balaguer提出了一种能够在复杂的三维金属基结构的爬壁机器人。该机器人采用“毛毛虫“的概念来取代这些结构,并实时生成控制设计从而确保稳定的自我支持。Longo建议一个城市侦察双足机器人。这种机器人能够在表面上实现交替移动,并且小到足以穿越密闭空间。Minor and Rossman 提出了一种有腿的机器人,能够通过移动其身体从而产生推力。这些机器人的结构让它们沿着管道和梁结构,并通过内爬管道,但机器人不能够避免节点。在本篇论文中提出的机器人能够围绕结构节点移动。 对于位移和攀爬金属结构的最优解问题在理论上是基于一种原理,动力执行机构是机器人结构的一部分,直接连接到并联机器人地末端,并用一种几何技巧克服了用于微小运动时的障碍。此外,机器人要轻便,机械结构简单,具有大的载荷和高速运转能力。这些条件基本都是由并联机器人实现。基于这个原因,用一种改进的的并联机器人作为攀爬机器人完全是有可能的。 基本上,并联机器人用于攀登必须用适当的夹具系统改变两个环中的一个,并取代另一个环,并通过预先设定的位移方向实现几何构型的动作。对并联机器人而言,这个过程简单且自然。
对《公共行政学》的课程综述 作者:赵化宁 学校:池州电大 专业:行政管理 学号:1034001413001 指导教师: 2011年 11 月 目录 内容摘要第 1页 一、《公共行政学》的主要内容和基本原理介绍第 2页 二、“行政领导”理论在实践中的运用第 5页 三、学习该课程的体会和收获第 7页参考文献第 8页 内容摘要 公共行政是对国家的治理。公共行政是政府行政 , 是政府对国家的治理。一个国家的公共行政决定了一个国家的治理水平 , 善政才有善治。公共行政就是治国安邦 , 它的核心问题是如何管理好国家 , 本文从三个方面对该课程做了综述,首先,对《公共行政学》的主要内容和基本原理做了介绍。其次, 分析了“行政领导”理论在实践中的运用。以贵池区殷汇镇为例,近年来,镇政府在区委、区政府和镇党委的领导下,团结带领全镇人民,扎实苦干、开拓创新、与时俱进,全镇综合经济实力进一步增强。最后,谈了学习该课程的体会和收获, 学习和研究公共行政学的目的就是提高和完善政府的管理 , 尽快把我国建设成为现代化的强国。
对《公共行政学》的课程综述 公共行政是对国家的治理。公共行政是政府行政 , 是政府对国家的治理。一个国家的公共行政决定了一个国家的治理水平 , 善政才有善治。公共行政就是治国安邦 , 它的核心问题是如何管理好国家 , 如何使社会全面快速地发展 , 使人民安居乐业。公共行政就是为国家的政治 , 经济 , 文化和社会发展提供保证 , 就是执行国家意志和实现公共利益。依法处理政务的有效性、公平性、民主性的规律, 这是公共行政学所要研究的内容。行政领导是指在公共组织中,领导个人或领导集体, 依法行使行政权力,运用各种方法,实现行政目的的行为过程。公共利益必须由政府予以贯彻执行才能实现 . 只有政府才能满足人民群众的有关社会稳定 , 社会公平 , 社会安全的需要。 一、《公共行政学》的主要内容和基本原理介绍 公共行政学全书共分为十六章内容。 第一章介绍公共行政含义,指公共组织(政府的行政,即公共组织对社会公共事务的管理。具有公共性、公共性、法则性、民主性、公平性、高效性特点的交叉与综合性学科。 第二章主要介绍行政环境是指直接或间接影响公共行政的各种内外部因素的总和。它具有复杂性、约束性、多样性、和不稳定性 , 的特点。行政环境与公共行政的关系是辨证的关系, 公共行政必须适应行政环境,行政环境制约、决定公共行政; 公共行政对行政环境有改 造作用。虽然一般行政环境即自然地理、政治、经济、文化和国际环境对公共行政的作用是十分重要的, 但是, 具体环境的作用也不容忽视。组织环境组织文化对公共组织形成团体凝聚力有十分重要的作用。 第三章介绍政府职能,是指政府在社会中所扮演的角色和所起的作用。政府职能有普遍性 . 强制性 . 系统性 . 不可代替性和服务性等特点。论述政府在资源配置