单片机应用课程设计任务书
单片机应用课程设计说明书
学院名称:计算机与信息工程学院
班级名称:网工124
学生姓名:卞可虎
学号:2012211369
题目:双机间的串口双向通信设计指导教师:于红利
起止日期:2014.12.29至2015.1.4
目录
一、绪论 (1)
二、相关知识 (6)
2.1 双机通信介绍 (6)
2.2单片机AT89C51介绍 (6)
2.3 串行通信简介 (8)
2.3.1串行通信的特点 (8)
2.3.2串行通信技术标准 (9)
三、总体设计 (10)
3.1 设计需求 (10)
四、硬件设计 (10)
4.1 系统硬件电路设计 (10)
4.1.1整体电路设计 (10)
4.1.2 控制电路设计 (11)
4.1.3 复位电路 (11)
4.1.4 显示电路 (12)
五、软件设计 (12)
5.1发送端程序流程 (12)
5.2接收端程序流程 (13)
5.3按键程序 (14)
5.4串口通信程序 (15)
5.5数码管显示程序 (16)
六、Proteus软件仿真 (16)
七、结束语 (19)
参考文献 (20)
指导教师评语 (21)
成绩评定 (21)
附录:源程序 (22)
一、绪论
电子技术的飞速发展,单片机也步如一个新的时代,越来越多的功能各异的单片机为我们的设计提供了许多新的方法与思路。单片机之间的通信可以分为两大类:并行通信和串行通信。串行通信传输线少,长距离传输时成本低,且可以利用数据采集方便灵活,成本低廉等优点,在通信中发挥着越来越重要的作用。所以本系统采用串行通信来实现单片机之间可靠的,有效的数据交换。
对于一些类似复杂的后台运算及通信与高实时性前台控制系统、软件资源消耗大的系统、功能强大的低消耗系统、加密系统等等。如果合理使用多种不同类型的单片机组合设计,可以得到极高灵活性与性能价格比,因此,多种异型单片机系统设计渐渐成为一种新的思路,单片机技术作为计算机技术的一个重要分支,由于单片机体积小,系统运行可靠,数据采集方便灵活,成本低廉等优点,在通信中发挥着越来越重要的作用。但在一些相对复杂的单片机应用系统中,仅仅一个单片机资源是不够的,往往需要两个或多个单片机系统协同工作。这就对单片机通
信提出了更高要求。
二、相关知识
2.1 双机通信介绍
两台机器的通信方式可分为单工通信、半双工通信、双工通信,他们的通信原理及通信方式为:
单工通信:是指消息只能单方向传输的工作方式。单工通信信道是单向信道,发送端和接收端的身份是固定的,发送端只能发送信息,不能接收信息;接收端只能接收信息,不能发送信息,数据信号仅从一端传送到另一端,即信息流是单方向的。通信双方采用单工通信属于点到点的通信。根据收发频率的异同,单工通信可分为同频通信和异频通信。
半双工通信:这种通信方式可以实现双向的通信,但不能在两个方向上同时进行,必须轮流交替地进行。也就是说,通信信道的每一段都可以是发送端,也可以是接端。但同一时刻里,信息只能有一个传输方向。如日常生活中的例子有步话机通信等。
双工通信:双工通信是指在同一时刻信息可以进行双向传输,和打电话一样,说的同时也能听,边说边听。这种发射机和接收机分别在两个不同的频率上能同时进行工作的双工机也称为异频双工机。双工机的特点是使用方便,但线路设计较复杂,价格也较高。
2.2单片机AT89C51介绍
AT89C51是一个低功耗,高性能的8位单片机,片内含8k的可反复擦写1000次的Flash只读程序存储器,兼容标准MCS-51指令系统及80C51引脚结构,芯片内集成了通用8位中央处理器和ISP Flash存储单元,功能强大的微型计算机的AT89C51可为许多嵌入式控制应用系统提供高性价比的解决方案。
AT89C51有40个引脚,8k的片内程序存储器,256 bytes的随机存取数据存储器,32个外部双向输入/输出口,5个中断优先级2层中断嵌套中断,2个16位可编程定时计数器,2个全双工串行通信口,WDT电路,片内时钟振荡器。
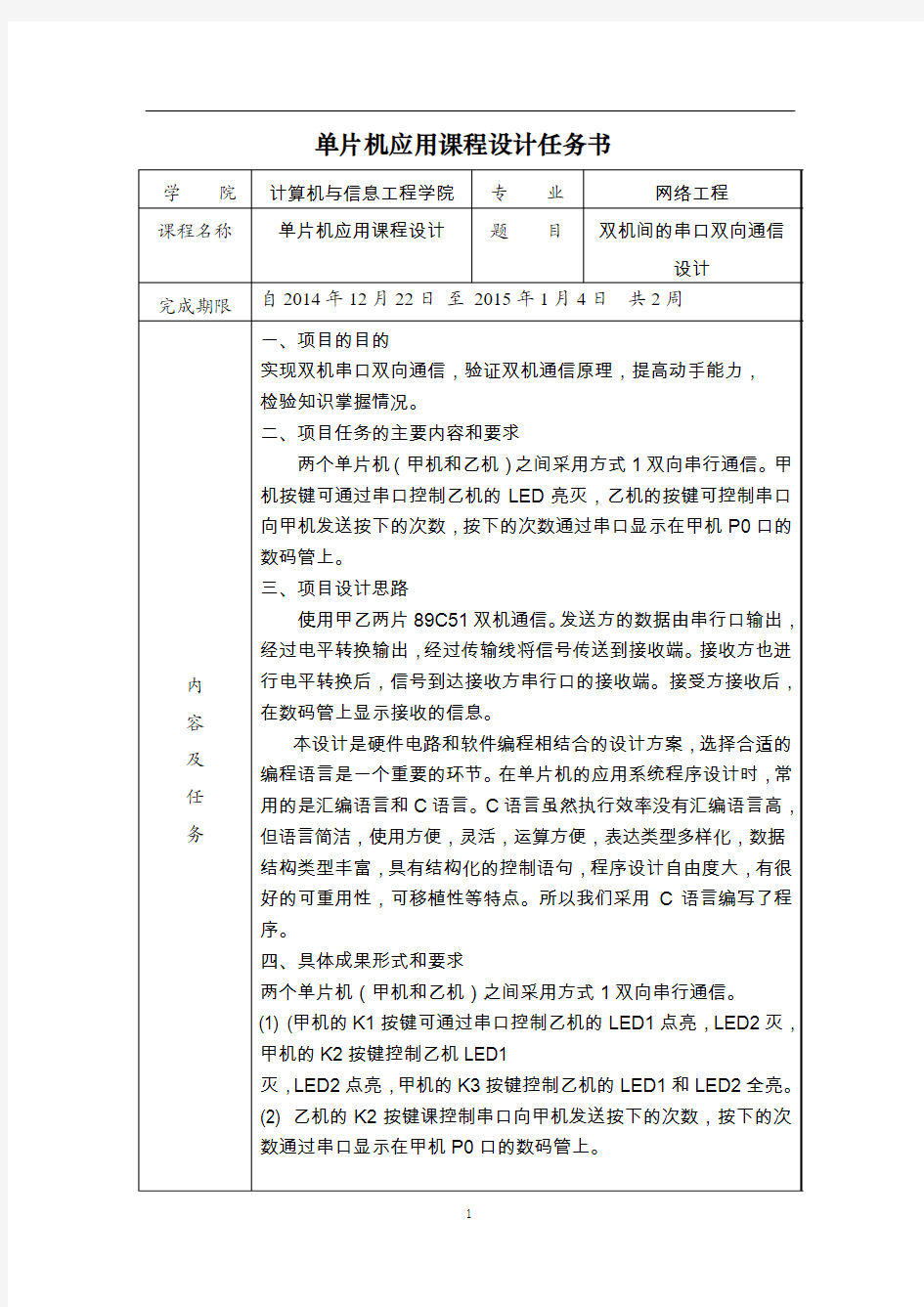
AT89C51芯片DIP双列直插式封装引脚如图1.1所示。
图1.1 AT89C51引脚排列
P0 口:P0口是一个8位的双向I/O口。作为输出口时,每位能驱动8个TTL逻辑电平。对P0端口写“1”时,引脚是高阻抗输入。当访问外部程序和数据存储器时,P0口也被作为低8位地址/数据复用。
P1 口:P1 口是一个具有内部上拉电阻的8 位双向I/O 口,P1 输出缓冲器可以驱动4 个TTL 逻辑电平。对P1 端口写“1”时,内部上拉电阻把端口拉高,此时是输入口使用。作为输入使用时,因为外部拉低的引脚由于内部电阻,将输出电流(IIL)。P3口亦作为AT89C51特殊功能(第二功能)使用,如表1.1所示.
P2 口:P2口是一个具有内部上拉电阻的8 位双向I/O 口,P2 输出缓冲器可以驱动4 个TTL逻辑电平。对P2 端口写“1”时,内部上拉电阻把端口拉高,此时是输入口使用。作为输入使用时,因为外部拉低的引脚由于内部电阻,将输出电流(IIL)。
P3 口:P3 口是一个具有内部上拉电阻的8 位双向I/O 口,P2 输出缓冲器能驱动4 个TTL逻辑电平。对P3 端口写“1”时,内部上拉电阻把端口拉高,此时是输入口使用。作为输入使用时,因为外部拉低的引脚由于内部电阻,将输出电流(IIL)。P3口亦作为AT89C51特殊功能(第二功能)使用,如表1.2所示.
P1引脚口第二功能如下:
P3引脚口第二功能如下:
ALE/PROG:在访问外部程序存储器或数据存储器时,ALE(地址锁存允许)输出脉冲用于锁存地址的低8位字节。一般情况下,ALE仍以时钟振荡频率的1/6输出固定的脉冲信号,因此它可对外输出时钟或用于定时目的。
PSEN:程序储存允许(PSEN)输出是外部程序存储器的读选通信号,当AT89C51由外部程序存储器取指令(或数据)时,每个机器周期两次PSEN有效,即输出两个脉冲,在此期间,当访问外部数据存储器,将跳过两次PSEN 信号。
EA/VPP:当外部访问允许,使CPU仅访问外部程序存储器(地址为0000H-FFFFH),EA端必须保持低电平(接地)。当加密位LB1被编程,复位时内部会锁存EA端状态。
例如EA端为高电平,接Vcc端,CPU则执行内部程序存储器的指令。2.3 串行通信简介
2.3.1串行通信的特点
在远程通信和计算机科学中,串行通信是指在计算机总线或其他数据通道上,每次传输一个位元数据,并连续进行以上单次过程的通信方式。与之对应的
是并行通信,它在串行端口上通过一次同时传输若干位元数据的方式进行通信。一位接一位地顺序传送。这样一个字节的数据要分8次由低位到高位按顺序一位位地传送。由此可见,串行通信的特点如下:1、节省传输线,这是显而易见的。尤其是在远程通信时,此特点尤为重要。这也是串行通信的主要优点;2、数据传送效率低。与并行通信比,这也这是显而易见的。这也是串行通信的一个重要缺点。
串行通信被用于长距离通信以及大多数计算机网络,在这些应用场合里,电缆和同步化使并行通信实际应用面临困难。凭借着其改善的信号完整性和传播速度,串行通信总线正在变得越来越普遍,甚至在短程距离的应用中,其优越性已经开始超越并行总线不需要串行化元件等缺点。
2.3.2串行通信技术标准
(1)数据传输率
比特率和波特率:比特率是指每秒传输的二进制位数,用bps(bit/s)表示。波特率是指每秒传输的符号数,若每个符号所含的信息量为1比特,则波特率等于比特率。在计算机中,一个符号的含义为高低电平,它们分别代表逻辑“1”和逻辑“0”,所以每个符号所含的信息量刚好为1比特,因此在计算机通信中,常将比特率称为波特率,即:1波特(B)=1比特(bit)=1位/秒(1bps)例如:电传打字机最快传输率为每秒10个字符/秒,每个字符包含11个二进制位,则数据传输率为:11位/字符×10个字符/秒=110位/秒=110波特(Baud)计算机中常用的波特率是:110、300、600、1200、2400、4800、9600、19200、28800、33600,目前最高可达56Kbps.
(2)发送时钟和接收时钟
在串行通信中,二进制数据以数字信号的信号形式出现,不论是发送还是接收,都必须有时钟信号对传送的数据进行定位。在TTL标准表示的二进制数中,传输线上高电平表示二进制1,低电平表示二进制0,且每一位持续时间是固定的,由发送时钟和接收时钟的频率决定。
接收时钟和发送时钟与波特率有如下关系:F=n×B这里F是发送时钟或接收时钟的频率;B是数据传输的波特率;n称为波特率因子。设发送或接收时钟的周期为Tc,频率为F的位传输时间为Td,则:Tc=1/F,Td=1/B得到:Tc=T/n在实际串行通信中,波特率因子可以设定。在异步传送时,n=1,16,64实际常采n=16,即发送或接收时钟的频率要比数据传送的波特率高n倍。在同步通信中波特率因子必等于1。
三、总体设计
3.1 设计需求
本设计需要用甲机三个开关控制乙机两个LED灯三种亮灭方式,用甲机的数码管显示乙机开关的点击次数,用反相器实现电路电平高低转换,使电路输入输出,用复位电路控制整个系统电路恢复原状态。发送方的数据由串行口输出,经过电平转换输出,经过传输线将信号传送到接收端。接收方也进行电平转换后,信号到达接收方串行口的接收端。接受方接收后,在数码管上显示接收的信息。
图3.1 系统框架图
四、硬件设计
4.1 系统硬件电路设计
4.1.1整体电路设计
将数码管与单片机U1的P0口连接构成系统的开关记数显式电路的部分;将开关与单片机P3接口连接组成系统的按键电路,用来对显示器的控制;LED 的段选端与单片机U2的P2口连接构成系统的LED显示系统;单片机左边部分电路与单片机构成系统的复位电路。
图4.1 系统电路图
4.1.2 控制电路设计
本系统将甲机的开关K2,K3分别连接两个反相器,并分别把两个开关连接甲机单片机引脚P1.0和P1.1;将K1连接引脚P3.2,三个开关另一端接地,此电路用甲机三个开关分别控制乙机两个LED灯的三种亮灭状况。开关控制电路设计图如图4.2所示。
图4.2控制电路设计图
4.1.3 复位电路
本设计将元器件如电路设计图4.3所示连接并与单片机的引脚相连,构成系统的复位电路。甲机点击复位电路开关,可以使乙机LED灯全灭,恢复未开启状态,乙机点击复位电路开关,使甲机数码管变为零。
图4.3 复位电路图
4.1.4 显示电路
本设计将LED数码显示管的段选端与甲机单片机的P0口相连,由于数码管采用的是动态显示,所以通过对P0的8位二进制数据的改变使数码显示管动态显示;将LED的位选端与单片机的P2口连接使LED数码显示管不断的到位选信号在与数选信号不断的配合下显示开关按键次数数据。系统显示部分电路设计图如图4.4所示。
图4.4 系统显示部分电路设计图
五、软件设计
5.1发送端程序流程
本系统是通过利用反相器实现高低电平的转换进行信息的输入输出,最后利用LCD亮灭实现甲机功能,用数码管记数实现乙机功能。具体过程如下:先初始化显示器,然后利用甲机开关按键发送信号,然后通过从机的应答,从机应答后,甲机发送数据实现发送端功能,设计流程图如图5.1所示:
图5.1发送端程序流程图
5.2接收端程序流程
乙机先把程序初始化,接受甲机的发送信号,接收未成功,重新接收,若接收成功从机发送接收完成信息,以及显示系统功能,设计流程图如图5.2所示:
图5.2接收端程序流程图
5.3按键程序
单片机读取按键值的方法有两种:查询方式和中断方式。查询方式是利用键盘程序不断查询是否有按键按下,有按下则进入相应按键的子程序进行数据处理,没有则一直循环查询;中断方式是将按键动作与单片机的中断系统联系起来,有按键按下时,就引起单片机中断,使系统进入中断处理程序。本设计中有3个按键,采用中断方式来处理读取按键值程序。
读取按键子程序如下:
while(1){
DelayMS(100);
if(K1==0){
Operation_NO=1;
}
if(K2==0){
Operation_NO=2;
}
if(K3==0){
Operation_NO=3;
}
switch(Operation_NO)
{case 1: Putc_to_S('A');
break;
case 2: Putc_to_S('B');
break;
case 3: Putc_to_S('C');
break;
} }
5.4串口通信程序
本系统采用晶振的频率为11.0592MHz,T1工作在模式2下,波特率为9600b/s,将上述公式变形并带入数据得T1的初值为0xFD。单片机主程序中串口中断的使用代码如下:
void main()
{P0=0x00;
SCON=0x50;
TMOD=0x20;
TH1=0xfd;
TL1=0xfd;
PCON=0x00;
RI=0;
TI=0;
TR1=1;
IE=0x90;
……
}
5.5数码管显示程序
本设计中显示驱动方式,数据通过74LS164的数据端送至数码管显示。先按照74LS164的时钟时序写入8段码,写完后送入数码管程序如下:
uchar Operation_NO=0;
uchar code DSY_CODE[]={0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90};
void DelayMS(uint ms)
{
uchar i;
while(ms--)
for(i=0;i<120;i++);
}
void Putc_to_S(uchar c)
{SBUF=c;
while(TI==0);
TI=0;
}
……
void Serial_INT() interrupt 4
{if(RI)
{RI=0;
if(SBUF>=0&&SBUF<=9) P0=DSY_CODE[SBUF];
else P0=0x00;
} }
六、Proteus软件仿真
用Keil软件编译程序生成可执行文件.hex文件后,在Proteus文件中在单片机里加入Keil软件中生成的hex文件,Hex文件烧入到单片机中后,开始运行电路图,点击开关K1,K2,K3,实现LED灯1,2的点亮。U2的K2开关点击次数可以再数码管显示,系统的电路及显示效果均到达设计要求,显示电路功能如下图5.1所示。
图6.1系统显示图
程序运行时,点击甲机按键K1,乙机的LED1灯亮,点击甲机按键K2,乙机LED2亮,点击甲机按键K3,乙机LED1,2灯都亮,系统效果图如图5.2所示
图6.2 开关控制LED灯亮灭图
点击乙机开关K2,每点击开关K2一次,甲机数码管就加一,点击甲机K2五次,数码管显示五,系统效果图如图5.3所示。
图6.3数码管显示开关按键次数图
七、结束语
通过此次课程设计,使我更加扎实的掌握了有关单片机方面的知识,在设计过程中虽然遇到了一些问题,但经过一次又一次的思考,一遍又一遍的检查终于找出了原因所在,也暴露出了前期我在这方面的知识欠缺和经验不足。
在课程设计过程中,我们不断发现错误,不断改正,不断领悟,不断获取。这次课程设计终于顺利完成了,在设计中遇到了很多问题,最后在老师的指导下,终于游逆而解。在今后的学习实践过程中,一定要不懈努力,不能遇到问题就想到要退缩,一定要不厌其烦的发现问题所在,然后一一进行解决,只有这样,才能成功的做成想做的事,才能在今后的道路上劈荆斩棘,收获喜悦!
回顾起此课程设计,至今我仍感慨颇多,从理论到实践,在这段日子里,可以说得是苦多于甜,但是可以学到很多很多的东西,同时不仅可以巩固了以前所学过的知识,而且学到了很多在书本上所没有学到过的知识。通过这次课程设计使我懂得了理论与实际相结合是很重要的,只有理论知识是远远不够的,只有把所学的理论知识与实践相结合起来,从理论中得出结论,才能真正为社会服务,从而提高自己的实际动手能力和独立思考的能力。
参考文献
[1]张毅刚,彭喜元,姜守达,乔立岩. 新编MCS-51单片机应用设计. 哈尔滨工业大学出版社. 2009.08
[2]李全利.单片机原理与接口技术.高等教育出版社.2009.01
[3]蔡明文,冯先成.单片机课程设计.华中科技出版社.2007.03
[4]范红刚,魏学海,任思璟.51单片机自学笔记.北京航空航天大学出版
社.2010.01
[5]许超,吴新杰,张丹. 基于Proteus和Keil的单片机课程教学改革.辽宁大学学报,2011.01
[6]石明江,顾亚雄,张禾.单片机原理与应用课程教学改革与实践.计算机教育出版社,2011.06
[7]李学军. 如何用MCS-51单片机扩展串口进行通讯. 宁夏机械,2003.02
学生签名:填表日期:年月日
#include
case RAA: if (ch==0xaa) gRecState=RLEN; else if (ch==0x55) gRecState=RAA; else gRecState=R55; break; case RLEN: gRecLen=ch; gRecCount=0; gRecState=RDATA; break; case RDATA: RecBuf[gRecCount]=ch; gRecCount++; if (gRecCount>=gRecLen) { gRecState=RCH; } break; case RCH: temp=0; for(i=0;i 专业方向课程设计报告 题目:单片机双机之间的串行通信设计 单片机双机之间的串行通信设计 一.设计要求: 两片单片机利用串行口进行串行通信:串行通信的波特率可从键盘进行设定,可选的波特率为1200、2400、4800和9600bit/s。 二、方案论证: 方案一:以两片51单片机作为通信部件,以4*4矩阵键盘作为数据输入接口,通过16个不同键值输入不同的信息,按照51单片机的方式3进行串口通信,从机采用中断 方式接收信息并按照通信协议改变波特率或者用I/O口输出、CD4511译码、数码管显示相关数据,整个系统的软件部分采用C语言编写。 方案二:整个系统的硬件设计与方案一样,但是通信方式采用方式一进行通信,主从机之间的访问采用查询方式,数据输出直接由单片机的译码程序输出译码数据,同时软件编写采用汇编语言。 两种方式从设计上来说各有特色,而且两种方式都应该是可行的。方案一中按照方式三通信可以输出九位数据而方式一只能输出八位数据,但就本题的要求来说方式一就可以了。主从机之间的交流采用中断方式是一种高效且保护单片机的选择,但是相比之下本人对查询方式的理解更好一些。数码管的显示若采用CD4511译码则直接输出数据就可以了,但是这样会增加硬件陈本,而且单片机的资源大部分都还闲置着,所以直接编写一段译码程序是比较好的做法。另外在软件编写上,采用C语言在后续设计中对硬件的考虑稍少一些,换言之采用汇编可以使自己对整个通信过程及单片机的部分结构有更清晰地认识所以综合考虑采用方案二。 三、理论设计: 采用AltiumDesigner绘制的原理图(整图) 本系统主要包括五个基本模块:单片机最小系统(包括晶振电路、电源、复位电路及相关设置电路)、4*4矩阵键盘、功能控制电路、数据显示电路、波特率更改指示电路。 本设计的基本思路是通过控制口选择将要实现的功能,然后矩阵键盘输入数据,单片机对数据进行处理(加校验码、设置功能标志位),然后与从机握手,一切就绪之后后就开始发送数据,然后从机对接收数据校验,回发校验结果,主机根据校验结果进行下一步动作,或者重发,或者进入下一 数据的发送过程,然后按照此过程不段循环,直到结束。 晶振电路提供脉冲,加上复位电路,将 EA接入高电电平选择片内程序存储器。 这是一个单片机能够工作的最低设置。 串口通讯—通信协议 所谓通信协议是指通信双方的一种约定。约定包括对数据格式、同步方式、传送速度、传送步骤、检纠错方式以及控制字符定义等问题做出统一规定,通信双方必须共同遵守。因此,也叫做通信控制规程,或称传输控制规程,它属于ISO'S OSI七层参考模型中的数据链路层。 目前,采用的通信协议有两类:异步协议和同步协议。同步协议又有面向字符和面向比特以及面向字节计数三种。其中,面向字节计数的同步协议主要用于DEC公司的网络体系结构中。 一、物理接口标准 1.串行通信接口的基本任务 (1)实现数据格式化:因为来自CPU的是普通的并行数据,所以,接口电路应具有实现不同串行通信方式下的数据格式化的任务。在异步通信方式下,接口自动生成起止式的帧数据格式。在面向字符的同步方式下,接口要在待传送的数据块前加上同步字符。 (2)进行串-并转换:串行传送,数据是一位一位串行传送的,而计算机处理数据是并行数据。所以当数据由计算机送至数据发送器时,首先把串行数据转换为并行数才能送入计算机处理。因此串并转换是串行接口电路的重要任务。 (3)控制数据传输速率:串行通信接口电路应具有对数据传输速率——波特率进行选择和控制的能力。 (4)进行错误检测:在发送时接口电路对传送的字符数据自动生成奇偶校验位或其他校验码。在接收时,接口电路检查字符的奇偶校验或其他校验码,确定是否发生传送错误。 (5)进行TTL与EIA电平转换:CPU和终端均采用TTL电平及正逻辑,它们与EIA采用的电平及负逻辑不兼容,需在接口电路中进行转换。 (6)提供EIA-RS-232C接口标准所要求的信号线:远距离通信采用MODEM时,需要9根信号线;近距离零MODEM方式,只需要3根信号线。这些信号线由接口电路提供,以便与MODEM或终端进行联络与控制。 2、串行通信接口电路的组成 为了完成上述串行接口的任务,串行通信接口电路一般由可编程的串行接口芯片、波特率发生器、EIA 与TTL电平转换器以及地址译码电路组成。其中,串行接口芯片,随着大规模继承电路技术的发展,通用的同步(USRT)和异步(UART)接口芯片种类越来越多,如下表所示。它们的基本功能是类似的,都能实现上面提出的串行通信接口基本任务的大部分工作,且都是可编程的。才用这些芯片作为串行通信接口电路的核心芯片,会使电路结构比较简单。 3.有关串行通信的物理标准 为使计算机、电话以及其他通信设备互相沟通,现在,已经对串行通信建立了几个一致的概念和标准,这些概念和标准属于三个方面:传输率,电特性,信号名称和接口标准。 1、传输率:所谓传输率就是指每秒传输多少位,传输率也常叫波特率。国际上规定了一个标准波特率系列,标准波特率也是最常用的波特率,标准波特率系列为110、300、600、1200、4800、9600和19200。大多数CRT终端都能够按110到9600范围中的任何一种波特率工作。打印机由于机械速度比较慢而使传输波特率受到限制,所以,一般的串行打印机工作在110波特率,点针式打印机由于其内部有较大的行缓冲 51串口通信协议(新型篇) C51编程:这是网友牛毅编的一个C51串口通讯程序! //PC读MCU指令结构:(中断方式,ASCII码表示) //帧:帧头标志|帧类型|器件地址|启始地址|长度n|效验和|帧尾标志 //值: 'n' 'y'| 'r' | 0x01 | x | x | x |0x13 0x10 //字节数: 2 | 1 | 1 | 1 | 1 | 1 | 2 //求和: ///////////////////////////////////////////////////////////////////// //公司名称:*** //模块名:protocol.c //创建者:牛毅 //修改者: //功能描述:中断方式:本程序为mcu的串口通讯提供(贞结构)函数接口,包括具体协议部分 //其他说明:只提供对A T89c51具体硬件的可靠访问接口 //版本:1.0 //信息:QQ 75011221 ///////////////////////////////////////////////////////////////////// #include 河北科技大学 课程设计报告 学生姓名:学号: 专业班级: 课程名称:微型计算机原理及应用技术学年学期:2 0 1 2 —2 0 1 3 学年第一学期 指导教师: 2 0 1 3 年1 月 课程设计成绩评定表 目录 一、设计题目 (1) 二、设计目的 (1) 三、设计原理及方案 (1) 1、8251A的基本性能 (1) 2、8251A的内部结构 (1) 3、8251外部引脚图 (2) 4、8251A的编程 (2) 5、8251A的初始化 (3) 四、实现方法 (5) 1、程序流程图如下: (5) 2、连线图 (5) 3、8251A操作过程流程图 (7) 4、试验程序(见附录) (7) 五、实施结果 (7) 六、改进意见及建议 (7) 七、个人所做贡献 (8) 八、设计体会 (8) 九、同组成员名单 (8) 十、附录 (9) 一、设计题目 双机通过两台试验箱串行通讯 二、设计目的 1、掌握8088/86实验串行口通信的方法。 2、了解实现串行通讯的硬环境、数据格式的协议、数据交换的协议。 3、学习串行口通讯程序编写方法。 三、设计原理及方案 1、8251A的基本性能 8251A是可编程的串行通信接口芯片,基本性能有: (1).两种工作方式:同步方式,异步方式。同步方式下,波特率为064K,异步方式下,波特率为0~19.2K。 (2).同步方式下的格式 每个字符可以用5、6、7或8位来表示,并且内部能自动检测同步字符,从而实现同步。除此之外,8251A也允许同步方式下增加奇/偶校验位进行校验。 (3).异步方式下的格式 每个字符也可以用5、6、7或8位来表示,时钟频率为传输波特率的1、16或64倍,用1位作为奇/偶校验。1个启动位。并能根据编程为每个数据增加1个、1.5个或2个停止位。可以检查假启动位,自动检测和处理终止字符。 (4).全双工的工作方式 (5).提供出错检测 2、8251A的内部结构 发送器由发送缓冲器和发送 控制电路两部分组成。接收器由接 收缓冲器和接收控制电路两部分 组成。数据总线缓冲器,读/写控 制电路,调制解调控制电路。 8251A 内部结构图 串口通信协议 什么是串口 串口是计算机上一种非常通用设备通信的协议(不要与通用串行总线Universal SerialBus或者USB混淆)。大多数计算机包含两个基于RS232的串口。串口同时也是仪器仪表设备通用的通信协议;很多GPIB兼容的设备也带有RS-232口。同时,串口通信协议也可以用于获取远程采集设备的数据。 串口通信的概念非常简单,串口按位(bit)发送和接收字节。尽管比按字节(b yte)的并行通信慢,但是串口可以在使用一根线发送数据的同时用另一根线接收数据。它很简单并且能够实现远距离通信。比如IEEE488定义并行通行状态时,规定设备线总常不得超过20米,并且任意两个设备间的长度不得超过2米;而对于串口而言,长度可达1200米。 典型地,串口用于ASCII码字符的传输。通信使用3根线完成:(1)地线,(2)发送,(3)接收。由于串口通信是异步的,端口能够在一根线上发送数据同时在另一根线上接收数据。其他线用于握手,但是不是必须的。串口通信最重要的参数是波特率、数据位、停止位和奇偶校验。对于两个进行通行的端口,这些参数必须匹配:a,波特率:这是一个衡量通信速度的参数。它表示每秒钟传送的bit的个数。例如300波特表示每秒钟发送300个bit。当我们提到时钟周期时,我们就是指波特率例如如果协议需要4800波特率,那么时钟是4800Hz。这意味着串口通信在数据线上的采样率为4800Hz。通常线的波特率为14400,28800和36600。波特率可以远远大于这些值,但是波特率和距离成反比。高波特率常常用于放置的很近的仪器间的通信,典型的例子就是GPIB设备的通信。 b,数据位:这是衡量通信中实际数据位的参数。当计算机发送一个信息包,实际的数据不会是8位的,标准的值是5、7和8位。如何设置取决于你想传送的信息。比如,标准的ASCII码是0~127(7位)。扩展的ASCII码是0~255(8位)。如果数据使用简单的文本(标准ASCII码),那么每个数据包使用7位数据。每个包是指一个字节,包括开始/停止位,数据位和奇偶校验位。由于实际数据位取决于通信协议的选取,术语“包”指任何通信的情况。 c,停止位:用于表示单个包的最后一位。典型的值为1,1.5和2位。由于数据是在传输线上定时的,并且每一个设备有其自己的时钟,很可能在通信中两台设备间出现了小小的不同步。因此停止位不仅仅是表示传输的结束,并且提供计算机校正时钟同步的机会。适用于停止位的位数越多,不同时钟同步的容忍程度越大,但是数据传输率同时也越慢。 d,奇偶校验位:在串口通信中一种简单的检错方式。有四种检错方式:偶、奇、高和低。当然没有校验位也是可以的。对于偶和奇校验的情况,串口会设置校验位(数据位后面的一位),用一个值确保传输的数据有偶个或者奇个逻辑高位。例如,如果数据是011,那么对于偶校验,校验位为0,保证逻辑高的位数是偶数个。如果是奇 单片机原理与应用课程设计任务书 单片机原理与应用学年设计说明书 学院名称:计算机与信息工程学院 班级名称: 学生姓名: 学号:2012211369 题目:双机间的串口双向通信 指导教师 姓名: 起止日期:2014.12.29至2015.1.4 一、绪论 随着电子技术的飞速发展,单片机也步如一个新的时代,越来越多的功能各异的单片机为我们的设计提供了许多新的方法与思路。 对于一些场合,比如:复杂的后台运算及通信与高实时性前台控制系统、软件资源消耗大的系统、功能强大的低消耗系统、加密系统等等。如果合理使用多种不同类型的单片机组合设计,可以得到极高灵活性与性能价格比,因此,多种异型单片机系统设计渐渐成为一种新的思路,单片机技术作为计算机技术的一个重要分支,由于单片机体积小,系统运行可靠,数据采集方便灵活,成本低廉等优点,在通信中发挥着越来越重要的作用。 但在一些相对复杂的单片机应用系统中,仅仅一个单片机资源是不够的,往往需要两个或多个单片机系统协同工作。这就对单片机通信提出了更高要求。 单片机之间的通信可以分为两大类:并行通信和串行通信。串行通信传输线少,长距离传输时成本低,且可以利用数据采集方便灵活,成本低廉等优点,在通信中发挥着越来越重要的作用。所以本系统采用串行通信来实现单片机之间可靠的,有效的数据交换。 二、相关知识 2.1 双机通信介绍 两台机器的通信方式可分为单工通信、半双工通信、双工通信,他们的通信原理及通信方式为: 单工通信:是指消息只能单方向传输的工作方式。单工通信信道是单向信道,发送端和接收端的身份是固定的,发送端只能发送信息,不能接收信息;接收端只能接收信息,不能发送信息,数据信号仅从一端传送到另一端,即信息流是单方向的。通信双方采用单工通信属于点到点的通信。根据收发频率的异同,单工通信可分为同频通信和异频通信。 半双工通信:这种通信方式可以实现双向的通信,但不能在两个方向上同时进行,必须轮流交替地进行。也就是说,通信信道的每一段都可以是发送端,也可以是接端。但同一时刻里,信息只能有一个传输方向。如 ZHET 系统串口通讯协议 通 讯 技 术 手 册 型号:SYRDS1-485 (SYRDSSS1) SYRDL1-485 (SYRLSSS1) 玺瑞国际企业有限公司 SYRIS International Corp. 通讯技术手册 通讯协议(Protocol) 卡片阅读机模块(Reader Module)的通讯协议(Protocol)皆出自于SYRIS 的一种标准通讯协议,这种协议格式如下表: 1.SOH 和 END 都是一个字节的控制字符: SOH 控制器端定义为 <0x09> 模块端定义为 <0x0A> END 控制器及模块端均固定为 <0x0D> 其中 <0x> 为十六进制表示法. 2.TYPE 为模块型式编号,固定为一个字节,本型式编号固定为“A”. 3.ID为模块端的识别代码,这一字节的 ASCII 字符必须是在 1 <0x31> 到 8 <0x38> 的范围内,假如控制器端传送之ID值与模块地址编号相同时, 则该模块将会接收控制器端所传送的数据,而模块响应时,也会传回相同的地址编号. 4.FC是通讯功能码(Function Code)和资料(DATA)有相关性,固定为一个 字节,这些资料请参考通讯协议表及相关说明. 5.错误讯息判断代码(Error Code)为两个字节,第一个字节为固定为 <0x0E> ,第二个字节为错误代码,请参考错误讯息代码表. 6.8 BITS BCC是所有字符的检查字段,为二个字节,有关 8 BITS BCC 的 信息和范例程序,请参考附录A. 7.RS485传输协议请设定为”E,8,1”,速率为”19200”. 错误讯息代码表(Error Code Table) ※ Error Code #1固定为 <0x0E>. 双机串行通信的设计与实现 一、设计要求 1.单机自发自收串行通信。接收键入字符,从8251A的发送端发送,与同一个8251A的接收端接收,然后在屏幕上显示出来。 2.双机串行通信,在一台PC机键入字符,从8251A的发送端发送给另一台PC机,另一台PC机的8251A的接收端接收,然后在屏幕上显示出来。 二、所用设备 IBM-PC机两台(串行通信接口8251A两片,串行发送器MC1488和串行接收器MC1489各两片,定时器/计数器8253,终端控制器8259等),串口线一根 串行直连电缆用于两台台电脑通过串行口直接相连,电缆两 端的插头都是9 针的母插头: 三、硬件方案 1.设计思想 计算机传输数据有并行和串行两种模式。在并行数据传输方式中,使用8条或更多的导线来传送数据,虽然并行传送方式的速度很快,但由于信号的衰减或失真等原因,并行传输的距离不能太长,在串行通信方式中,通信接口每次由CPU得到8位的数据,然后串行的通过一条线路,每次发送一位将该数据放送出去。 串行通信采用两种方式:同步方式和异步方式。同步传输数据时,一次传送一个字节,而异步传输数据是一次传送一个数据块。 串口是计算机上一种非常通用设备串行通信的协议。大多数计算机包含两个基于RS232的串口。串口按位(bit)发送和接收字节。尽管比按字节(byte) 的并行通信慢,但是串口可以在使用一根线发送数据的同时用另一根线接收数据。典型地,串口用于ASCII码字符的传输。通信使用3根线完成:(1)地线,(2)发送,(3)接收。由于串口通信是异步的,端口能够在一根线上发送数据同时在另一根线上接收数据。其他线用于握手,但是不是必须的。串口通信最重要的参数是波特率、数据位、停止位和奇偶校验。对于两个进行通行的端口,这些参数必须匹配: RS-232(ANSI/EIA-232标准)是IBM-PC及其兼容机上的串行连接标准。可用于许多用途,比如连接鼠标、打印机或者Modem,同时也可以接工业仪器仪表。用于驱动和连线的改进,RS-232只限于PC串口和设备间点对点的通信。 IBM PC及其兼容机提供了一种有较强的硬件依赖性,但却比较灵活的串行口I/O的方法,即通过INT 14调用ROM BIOS串行通信口的例行程序。该例行程序。该例行程序包括将串行口初始化为指定的字节结构和传输速率,检查控制器的状态,读写字符等功能。 14号中断的功能总结如下: 串行口服务(Serial Port Service——INT 14H) 00H —初始化通信口03H —读取通信口状态 01H —向通信口输出字符04H —扩充初始化通信口 02H —从通信口读入字符 (1)、功能00H:初始化通信口 入口参数:AH=00H DX=初始化通信口号(0=COM1,1=COM2,……) AL=初始化参数,参数的说明如下:波特率奇偶位停止位字的位数76543210 Fax: 1-703-709-0985 https://www.doczj.com/doc/1810823616.html, Allen-Bradley DF1 Serial Communication Interface API The DASTEC Corporation Allen-Bradley DF1 Serial Communication Interface API allows the user to implement bi-directional serial communications to exchange data between applications running on a Windows/WinCE-based system with other devices supporting the Allen-Bradley DF1 full-duplex serial protocol. The devices can be AB devices, other host computers or even other system applications using the API. The Allen-Bradley DF1 Serial Communication Interface API enables a system to acts as a client device to other Allen-Bradley peer devices, initiating read and write operations on behalf of the system applications. The API also allows the system to emulate an Allen-Bradley PLC to respond to read and write requests and thus acts as a “virtual PLC” to other AB peers. The API is available for different Windows/WinCE-based systems/platforms and can be used with C/C++ or Visual Basic. The API consists of two component functionalities, client side and server side. The client side functionality is implemented with a single API DLL. Server side functionality is implemented with a DLL/executable pair. Together these components manage all aspects of the protocol and data exchange including responding to peers with proper acknowledgements, error/success codes and protocol data byte ordering. The system application need only to deal with the data values exchanged in native byte order. The user can employ either the API’s client, server or both functionalities with minimal code implementation. 单片机应用课程设计任务书 单片机应用课程设计说明书 学院名称:计算机与信息工程学院 班级名称:网工124 学生姓名:卞可虎 学号:2012211369 题目:双机间的串口双向通信设计指导教师:于红利 起止日期:2014.12.29至2015.1.4 目录 一、绪论 (1) 二、相关知识 (6) 2.1 双机通信介绍 (6) 2.2单片机AT89C51介绍 (6) 2.3 串行通信简介 (8) 2.3.1串行通信的特点 (8) 2.3.2串行通信技术标准 (9) 三、总体设计 (10) 3.1 设计需求 (10) 四、硬件设计 (10) 4.1 系统硬件电路设计 (10) 4.1.1整体电路设计 (10) 4.1.2 控制电路设计 (11) 4.1.3 复位电路 (11) 4.1.4 显示电路 (12) 五、软件设计 (12) 5.1发送端程序流程 (12) 5.2接收端程序流程 (13) 5.3按键程序 (14) 5.4串口通信程序 (15) 5.5数码管显示程序 (16) 六、Proteus软件仿真 (16) 七、结束语 (19) 参考文献 (20) 指导教师评语 (21) 成绩评定 (21) 附录:源程序 (22) 一、绪论 电子技术的飞速发展,单片机也步如一个新的时代,越来越多的功能各异的单片机为我们的设计提供了许多新的方法与思路。单片机之间的通信可以分为两大类:并行通信和串行通信。串行通信传输线少,长距离传输时成本低,且可以利用数据采集方便灵活,成本低廉等优点,在通信中发挥着越来越重要的作用。所以本系统采用串行通信来实现单片机之间可靠的,有效的数据交换。 对于一些类似复杂的后台运算及通信与高实时性前台控制系统、软件资源消耗大的系统、功能强大的低消耗系统、加密系统等等。如果合理使用多种不同类型的单片机组合设计,可以得到极高灵活性与性能价格比,因此,多种异型单片机系统设计渐渐成为一种新的思路,单片机技术作为计算机技术的一个重要分支,由于单片机体积小,系统运行可靠,数据采集方便灵活,成本低廉等优点,在通信中发挥着越来越重要的作用。但在一些相对复杂的单片机应用系统中,仅仅一个单片机资源是不够的,往往需要两个或多个单片机系统协同工作。这就对单片机通 串口通讯协议 波特率9600,数据位8位,起始位1位,停止位2位,校验采用16位CRC校验,校验包括头部信息和数据。 帧定义: 主机发送事件数据定义 u16 const crc_table[256] = { 0x0000U, 0x1021U, 0x2042U, 0x3063U, 0x4084U, 0x50a5U, 0x60c6U, 0x70e7U, 0x8108U, 0x9129U, 0xa14aU, 0xb16bU, 0xc18cU, 0xd1adU, 0xe1ceU, 0xf1efU, 0x1231U, 0x0210U, 0x3273U, 0x2252U, 0x52b5U, 0x4294U, 0x72f7U, 0x62d6U, 0x9339U, 0x8318U, 0xb37bU, 0xa35aU, 0xd3bdU, 0xc39cU, 0xf3ffU, 0xe3deU, 0x2462U, 0x3443U, 0x0420U, 0x1401U, 0x64e6U, 0x74c7U, 0x44a4U, 0x5485U, 0xa56aU, 0xb54bU, 0x8528U, 0x9509U, 0xe5eeU, 0xf5cfU, 0xc5acU, 0xd58dU, 0x3653U, 0x2672U, 0x1611U, 0x0630U, 0x76d7U, 0x66f6U, 0x5695U, 0x46b4U, 0xb75bU, 0xa77aU, 0x9719U, 0x8738U, 0xf7dfU, 0xe7feU, 0xd79dU, 0xc7bcU, 0x48c4U, 0x58e5U, 0x6886U, 0x78a7U, 0x0840U, 0x1861U, 0x2802U, 0x3823U, 0xc9ccU, 0xd9edU, 0xe98eU, 0xf9afU, 0x8948U, 0x9969U, 0xa90aU, 0xb92bU, 0x5af5U, 0x4ad4U, 0x7ab7U, 0x6a96U, 0x1a71U, 0x0a50U, 0x3a33U, 0x2a12U, 0xdbfdU, 0xcbdcU, 0xfbbfU, 0xeb9eU, 0x9b79U, 0x8b58U, 0xbb3bU, 0xab1aU, 0x6ca6U, 0x7c87U, 0x4ce4U, 0x5cc5U, 0x2c22U, 0x3c03U, 0x0c60U, 0x1c41U, 0xedaeU, 0xfd8fU, 0xcdecU, 0xddcdU, 0xad2aU, 0xbd0bU, 0x8d68U, 0x9d49U, 0x7e97U, 0x6eb6U, 0x5ed5U, 0x4ef4U, 0x3e13U, 0x2e32U, 0x1e51U, 0x0e70U, 0xff9fU, 0xefbeU, 0xdfddU, 0xcffcU, 0xbf1bU, 0xaf3aU, 0x9f59U, 0x8f78U, 0x9188U, 0x81a9U, 0xb1caU, 0xa1ebU, 0xd10cU, 0xc12dU, 0xf14eU, 0xe16fU, 0x1080U, 0x00a1U, 0x30c2U, 0x20e3U, 0x5004U, 0x4025U, 0x7046U, 0x6067U, 0x83b9U, 0x9398U, 0xa3fbU, 0xb3daU, 0xc33dU, 0xd31cU, 0xe37fU, 0xf35eU, 0x02b1U, 0x1290U, 0x22f3U, 0x32d2U, 0x4235U, 0x5214U, 0x6277U, 0x7256U, 0xb5eaU, 0xa5cbU, 0x95a8U, 0x8589U, 0xf56eU, 0xe54fU, 0xd52cU, 0xc50dU, 0x34e2U, 0x24c3U, 0x14a0U, 0x0481U, 0x7466U, 0x6447U, 0x5424U, 0x4405U, 0xa7dbU, 0xb7faU, 0x8799U, 0x97b8U, 0xe75fU, 0xf77eU, 0xc71dU, 0xd73cU, 0x26d3U, 0x36f2U, 0x0691U, 0x16b0U, 0x6657U, 0x7676U, 0x4615U, 0x5634U, 0xd94cU, 0xc96dU, 0xf90eU, 0xe92fU, 0x99c8U, 0x89e9U, 0xb98aU, 0xa9abU, 0x5844U, 0x4865U, 0x7806U, 0x6827U, 0x18c0U, 0x08e1U, 0x3882U, 0x28a3U, 0xcb7dU, 0xdb5cU, 0xeb3fU, 0xfb1eU, 0x8bf9U, 0x9bd8U, 0xabbbU, 0xbb9aU, 0x4a75U, 0x5a54U, 0x6a37U, 0x7a16U, 0x0af1U, 0x1ad0U, 0x2ab3U, 0x3a92U, 0xfd2eU, 0xed0fU, 0xdd6cU, 0xcd4dU, 0xbdaaU, 0xad8bU, 0x9de8U, 0x8dc9U, 0x7c26U, 0x6c07U, 0x5c64U, 0x4c45U, 0x3ca2U, 0x2c83U, 0x1ce0U, 0x0cc1U, 0xef1fU, 0xff3eU, 0xcf5dU, 0xdf7cU, 0xaf9bU, 0xbfbaU, 0x8fd9U, 0x9ff8U, 0x6e17U, 0x7e36U, 0x4e55U, 0x5e74U, 0x2e93U, 0x3eb2U, 0x0ed1U, 0x1ef0U }; u16 crc16(u16 crc,const u8 *data, u32 len )len可以为u8,u16,u32 { while (len--) crc = crc_table[(crc >> 8 ^ *(data++)) & 0xffU] ^ (crc << 8); return crc; } 例:u8 *buf=”123456789”; 西安邮电大学 单片机课程设计报告书题目:双机通信系统 、系统整体设计 1. 系统设计思路 双机通信的实质就是解决两单片机串行通信问题。针对于89C52单片机全双工异步 串行通信口,我们采用单片机直接交叉互连的串行通信方式。 考虑到设计应用于短距离传输、两单片机具有相同的数据格式及电平且为使设计简 单,我们最终决定采用方式二单片机直接交叉连接的串行通信方式, 上位机发送的数据 由串行口 TXD 端输出,直接由下位机的串行口数据接收端 RXD 接攵。需要注意的是一定 要保证主从机相同的数据传输速率,即要求设置相同的波特率。电路分为数码管显示模 块,以及单片机工作的基本复位、晶振模块。 2. 系统设计原理 (1)串行通信 一个是数据传送,另一个是数据转换。所谓数 所谓数据转换就是指单片机在接收数据时,如 单片机在发送 数据时,如何把并行数据转换为 串行数据进行发送。单片机的串行通信使用的是异步串 行通信, 所谓异步就是指发送端 和接收端使用的不是同一个时钟。异步串行通信通常以字符(或者字节)为单位组成字 符帧传送。字符帧由发送端一帧一帧地传送, 接收端通过传输线一帧一帧地接收。 而对 于两个单片机之间的串行通信,由于具有相同的数据格式及电平且是短距离通信则不必 要使用一些电平转化芯片(如 max232等)便可直接实现串行通讯,需要注意的是两单 片机硬件要共地,软件中需要设置相同波特率 STC89C5单片机有一个全双工的异步串行通信口,串行结构如下: ①数据缓冲器(SBUF 接受或发送的数据都要先送到 SBUF 缓存。有两个,一个缓存,另一个接受,用同 一直接地址99H,发送时用指令将数据送到 SBUF 即可启动发送;接收时用指令将 SBUF 中接收到的数据取出。 ②串行控制寄存器(SCON SCO 用于串行通信方式的选择,收发控制及状态指示,各位含义如下: SM0,SM1串行接口工作方式选择位,这两位组合成 00, 01,10,11对应于工作方 式0、1、2、3。串行接口工作方式特点见下表1. 表1串行口工作方式表 串行数据通信要解决两个关键问题, 据传送就是指数据以什么形式进行传送。 何把接收到的串行数据转化为并行数据, 串口通讯—串口通信协议 所谓通信协议是指通信双方的一种约定。约定包括对数据格式、同步方式、传送速度、传送步骤、检纠错方式以及控制字符定义等问题做出统一规定,通信双方必须共同遵守。因此,也叫做通信控制规程,或称传输控制规程,它属于ISO'S OSI七层参考模型中的数据链路层。 目前,串口通信协议通常有两类:异步协议和同步协议。同步协议又有面向字符和面向比特以及面向字节计数三种。其中,面向字节计数的同步协议主要用于DEC公司的网络体系结构中。 一、物理接口标准 1、串行通信接口的基本任务 (1)实现数据格式化:因为来自CPU的是普通的并行数据,所以,接口电路应具有实现不同串行通信方式下的数据格式化的任务。在异步通信方式下,接口自动生成起止式的帧数据格式。在面向字符的同步方式下,接口要在待传送的数据块前加上同步字符。 (2)进行串-并转换:串行传送,数据是一位一位串行传送的,而计算机处理数据是并行数据。所以当数据由计算机送至数据发送器时,首先把串行数据转换为并行数才能送入计算机处理。因此串并转换是串行接口电路的重要任务。 (3)控制数据传输速率:串行通信接口电路应具有对数据传输速率——波特率进行选择和控制的能力。 (4)进行错误检测:在发送时接口电路对传送的字符数据自动生成奇偶校验位或其他校验码。在接收时,接口电路检查字符的奇偶校验或其他校验码,确定是否发生传送错误。 (5)进行TTL与EIA电平转换:CPU和终端均采用TTL电平及正逻辑,它们与EIA采用的电平及负逻辑不兼容,需在接口电路中进行转换。 (6)提供EIA-RS-232C接口标准所要求的信号线:远距离通信采用MODEM 时,需要9根信号线;近距离零MODEM方式,只需要3根信号线。这些信号线由接口电路提供,以便与MODEM或终端进行联络与控制。 2、串行通信接口电路的组成 为了完成上述串行接口的任务,串行通信接口电路一般由可编程的串行接口芯片、波特率发生器、EIA与TTL电平转换器以及地址译码电路组成。其中,串行接口芯片,随着大规模继承电路技术的发展,通用的同步(USRT)和异步(UART)接口芯片种类越来越多,如下表所示。它们的基本功能是类似的,都能实现上面提出的串行通信接口基本任务的大部分工作,且都是可编程的。采用这些芯片作为串行通信接口电路的核心芯片,会使电路结构比较简单。 综合实验报告 实验题目:双机串行通信设计与实现 学生班级:电子 学生姓名: 学生学号: 指引教师: 实验时间: .9.12-.9.17 题目:双机串行通信设计与实现 班级:电子14-2 姓名:陈俊臣 摘要 串行通信是单片机一种重要应用。本次课程设计就是要运用单片机来完毕一种系 统实现双片单片机串行通信。通信成果实用数码管进行显示数码管采用查表方式显示。两个单片机之间采用RS232进行双机通信。在通信过程中使用通信合同进行通信。 双机通信实质就是解决两单片机串行通信问题。针对于89C51单片机全双工异步串行通信口,咱们采用单片机直接交叉互连串行通信方式。考虑到本设计应用于短距离传播、两单片机具备相似数据格式及电平且为使设计简朴,咱们最后决定本系统采用方式一单片机直接交叉连接串行通信方式,上位机发送数据由串行口TXD端输出,直接由下位机串行口数据接受端RXD接受。本设计硬件电路分为数码管显示模块、单片机工作基本复位电路以及晶振模块。编程采用C语言加以实现。通信成果使用数码管进行显示,数码管采用查表方式显示,两个单片机之间采用RS-232进行双向通信。 目录 1 引言------------------------------------------------------- 2 设计原理及规定--------------------------------------------- 2.1设计规定和原理-------------------------------------------- 2.2串行通信概述与分类----------------------------------- 2.3串行通信和并行通信区别------------------------------- 2.4 MCS-51串行接口基本特点----------------------------- 3器件简介 3.1器件简朴概述----------------------------------------- 3.2 器件重要功能特性-------------------------------------- 3.3 芯片引脚简介---------------------------------------- 4系统设计 4.1设计规定-------------------------------------------- 4.2设计方案-------------------------------------------- 4.3硬件设计-------------------------------------------- 4.4软件设计------------------------------------------- 4 电路仿真图---------------------------------------------------- 5心得------------------------------------------------------------ 成绩: 课程设计报告书 所属课程名称单片机原理与接口技术 题目双机串行通信 分院机电学院 专业、班级机械设计制造及其自动化B0902学号0612090218 学生姓名史强 指导教师周春明 2012年7月13日 目录 1课程设计任务书 (1) 2总体设计 (2) 3硬件系统设计 (3) 4程序设计 (6) 5程序调试及结果分析 (11) 6总结 (13) 7参考文献 (14) 辽东学院 一课程设计任务书 课程设计题目:双机串行通信 课程设计时间:自2012 年7月2日起至2012 年7月13日。课程设计要求: 1.通过本次课题设计,应用《单片机原理及其接口技术》等所学相关知识及查阅资料,完成简易双机串行通信设计,以达到理论与实践更好的结合、进一步提高综合运用所学知识和设计的能力的目的。 2.两片单片机之间进行串行通信,发送端将0~f循环发送到接收端,并在接 收端显示。接收完成后,led灯亮。 学生签名:史强 2012 年7月13日 课程设计评阅意见 评阅教师: 2012年月日 二总体设计 2.1 设计目的 通过本次课题设计,应用《单片机原理及其接口技术》等所学相关知识及查阅资料,完成简易双机串行通信设计,以达到理论与实践更好的结合、进一步提高综合运用所学知识和设计的能力的目的。 通过本次设计的训练,可以使我在基本思路和基本方法上对基于MCS-51单片机的嵌入式系统设计有一个比较感性的认识,并具备一定程度的设计能力。 2.2 设计任务 两片单片机之间进行串行通信,发送端将0~f循环发送到接收端,完成后在接收端的led 灯亮。 2.3 设计方法 本次设计,对于两片89C51,采用RS232进行双机通信。发送方的数据由串行口TXD段输出。接受方接收后,灯亮。为提高抗干扰能力,还可以在输入输出端加光耦合进行光电隔离。 软件部分,通过通信协议进行发送接收,主机先送AAH给从机,当从机接收到AAH后,向主机回答BBH。主机收到BBH后就把数码表TAB[16]中的10个数据送给从机,并发送检验和。从机收到16个数据并计算接收到数据的检验和,与主机发送来的检验和进行比较,若检验和相同则发送00H给主机;否则发送FFH 给主机,重新接受。从机收到16个正确数据后送到一个数码管显示。单片机双机之间的串行通信设计
串口通信协议
51串口通信协议(新型篇)
微机原理课程设计报告-双机串行通信
USB基本知识与通信协议书范本
双机间的串口双向通信(DOC)
系统串口通讯协议
双机串行通信的设计与实现
AB DF1串口通讯协议API接口
双机间的串口双向通信2.0
串口通讯协议
双机通信课程设计
串口通讯—通信协议
双机串行通信的设计与实现样本
双机通信课程设计
相关主题
文本预览