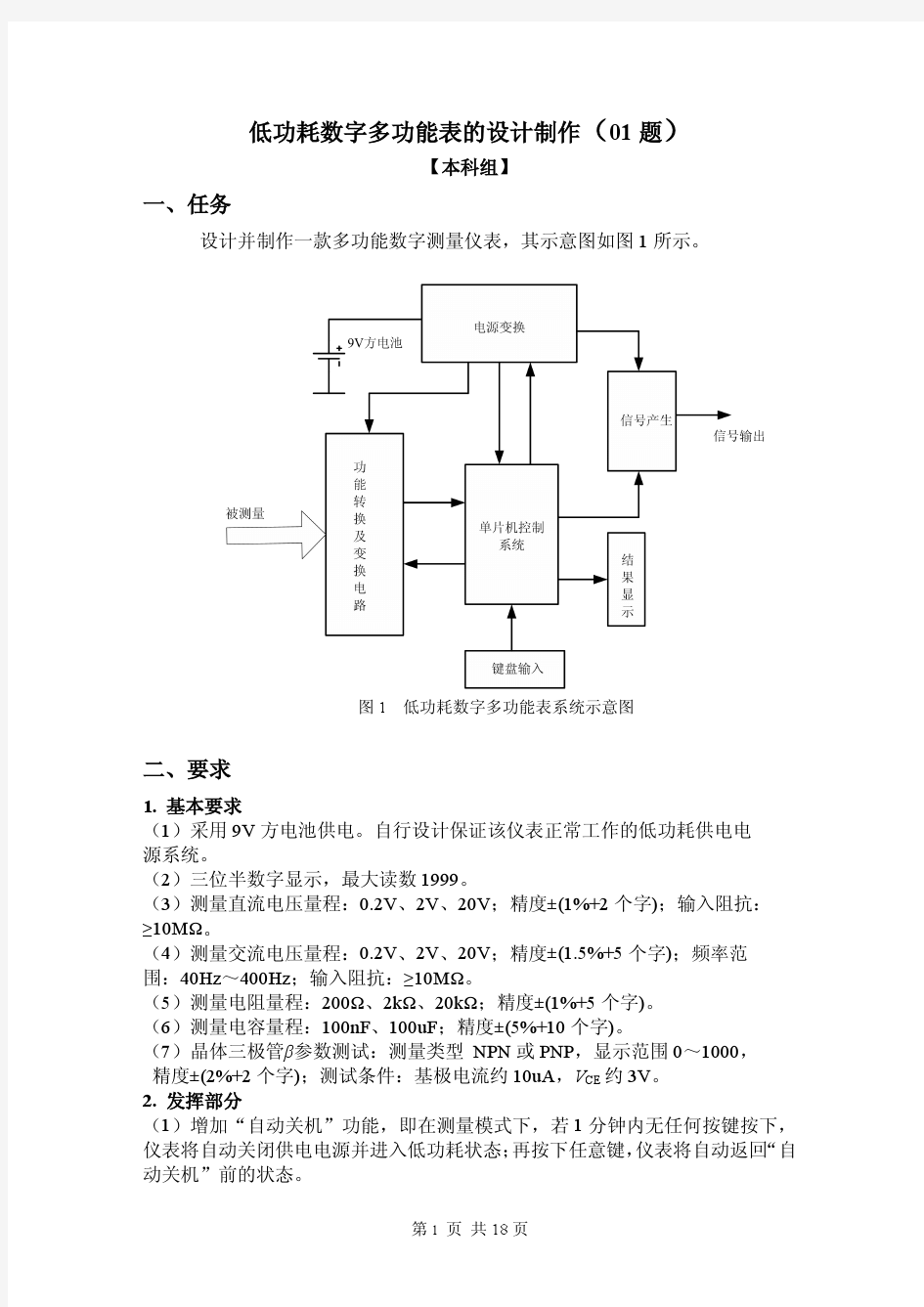
2013年全国大学生电子设计竞赛综合测评题 综合测评注意事项 (1)综合测评于2013年9月16日8:00正式开始,9月16日15:00结束。 (2)本科组和高职高专组优秀参赛队共用此题。 (3)综合测评以队为单位采用全封闭方式进行,现场不能上网、不能使用手机。 (4)综合测评结束时,制作的实物及《综合测评测试记录与评分表》由全国专家组委派的专家封存,交赛区保管。 波形发生器 使用题目指定的综合测试板上的555芯片和一片通用四运放324芯片,设计制作一个频率可变的同时输出脉冲波、锯齿波、正弦波Ⅰ、正弦波Ⅱ的波形产生电路。给出设计方案、详细电路图和现场自测数据波形(一律手写、3个同学签字、注明综合测试板编号),与综合测试板一同上交。 设计制作要求如下: 1、同时四通道输出、每通道输出脉冲波、锯齿波、正弦波Ⅰ、正弦波Ⅱ中的一种波形,每通道输出的负载电阻均为600欧姆。 2、四种波形的频率关系为1:1:1:3(3次谐波):脉冲波、锯齿波、正弦波Ⅰ输出频率范围为8kHz—10kHz,输出电压幅度峰峰值为1V;正弦波Ⅱ输出频率范围为24kHz—30kHz,输出电压幅度峰峰值为9V;脉冲波、锯齿波和正弦波输出波形应无明显失真(使用示波器测量时)。 频率误差不大于10%;通带内输出电压幅度峰峰值误差不大于5%。脉冲波占空比可调整。 3、电源只能选用+10V单电源,由稳压电源供给。不得使用额外电源。 4、要求预留脉冲波、锯齿波、正弦波Ⅰ、正弦波Ⅱ和电源的测试端子。 5、每通道输出的负载电阻600欧姆应标示清楚、置于明显位置,便于检查。 注意:不能外加555和324芯片,不能使用除综合测试板上的芯片以外的其他任何器件或芯片。 说明: 1、综合测评应在模数实验室进行,实验室应能提供常规仪器仪表、常用工具和电阻、电容、电位器等。
题目:开关稳压电源(E题) 摘要 本设计综合考虑题目基本部分和发挥部分的指标要求,系统采用简单的boost 升压电路作为DC-DC变换器主电路;PWM控制器采用低压型专用集成芯片UC3843; 主开关管采用IRF540;由内置12位A/D、D/A的高性能、低功耗单片机C8051F021组成系统测控与显示单元,采用液晶显示器作为系统的状态和运行数据显示屏。通过实际测试,作品的性能指标中,输出纹波完全达到了要求;电压调整率,整体效率,负载过流故障排除后自恢复功能,输出电压键控1V步进,电流、电压实时测量及数显功能等几项指标达均到了发挥部分要求;负载调整率也接近发挥部分指标要求。另外,系统还增加了实时输出功率数据显示和负载过流状态下的声、光报警等实用功能。
一、引言 为了满足题目发挥部分规定的电压调整率、负载调整率以及效率等几项指标要求,我们在设计中主要是尽量减少辅助控制电路的损耗。通过单片机和脉宽调制电路来稳定输出电压,并通过单片机的控制实现对整个电路的过流保护功能,排除过流故障后,电源能自动恢复为正常工作状态。同时,当输出电压与设定电压误差较大时,单片机能对输出电压进行一定调节,以提高负载调整率;通过单片机实现了输出电压的键盘设定和步进调整(步进为1V)。系统具有测量和数字显示输出电压、电流的功能。此外,还增加了实时输出功率测量与显示、在输出过流的时候系统发出声、光报警信号等功能。 二、方案论证与比较 1.DC-DC主回路拓扑方案论证 方案一:采用变压器升压的隔离型PWM直流-直流变换器电路,此电路效率较低,开关辐射/纹波较大,电路较复杂。 方案二:采用非隔离型BOOST升压电路,控制电路用专用集成芯片UC3843A,这种电路使用的外部原件最少、调试容易、成本低、效率高。因此,采用此种方案。 2. 控制方法及实现方案 方案一:采用电压型脉宽调制技术,产生频率固定,脉冲宽度可调整的方波脉冲,采用电压反馈环控制系统,它的反馈信息取自输出电压,用反馈电压调整控制器的输出脉冲宽度,改变脉冲占空比,实现开关电源的稳定。 方案二:采用电流型脉宽调制芯片,此技术与传统的仅有输出电压反馈的PWM系统相比增加了一个电感电流反馈。此反馈就做为PWM的斜坡函数,就不再需要锯齿波发生器,更重要的是使用电感电流反馈使系统的可靠性有了明显的改善,经比较具有如下优点: 1)使系统具有快速的瞬态响应及高速的稳定性。 2)输出电压精度很高。 3)具有内在的对功率开关管电流的控制及限流能力。 4)具有良好的并联运行能力。 可以看出方案二的控制性能明显优于方案一,所以采用方案二。 3. 提高效率的方法及实现方案 单片机系统及其它辅助电路的功耗对电源的整体效率有很大的影响。所以选用一款功耗低的单片机作为控制与显示单元电路。采用效率高、开关速度快、损耗小的MOS场效应管作为主开关管。选用快速、低损耗的肖特基二极管作为输出
电子设计大赛心得 XX年的全国大学生电子设计大赛终于落下帷幕,真的很庆幸自己得以参加这样的比赛。虽然最后失手的结果让人感到无比遗憾,但正如老师所说的,此前长达一年的技能学习对知识,心态的锻炼才是我们最大的收获,我会朝着自己所爱坚定地走下去。 一年的技能特训以来,尤其这个暑假里,在实验里的一幕幕依然仿佛在眼前,这将是令人难忘的,令人永远怀念的一段时光,因为在这段日子里,我们不懈地努力,全身心地投入。一个闷热,单调的夏天,却是充满回忆,收益匪浅的收获的季节。 时间过得好快,依然很怀念曾经一起努力的日子。和师兄姐,姐弟们的相互调侃,请教师兄,听老师说教,一起讨论算法,叫外卖一块吃,通宵攻关,小组篮球赛,一起焊电路,近乎争吵的讨论,为找器件走遍整个实验室,被师兄笑菜鸟,卷在台下跟电脑主机睡……这一幕幕仿佛在昨天。 一路走过来,从只知道些课本的理论知识之外一无所知的菜鸟开始,上培训课,请教老师、师兄,上网查资料,自己动手实践、摸索,到激动地喊出“我搞出来啦!”这是一个美妙的过程。在三人小组里,我的角色是负责软件的编写,在刚开始时遇到很大困难,特别是串口的初始化、中断的设置和文件配置上有很多不明白的地方,但在两位指导老师还有师兄的帮助下,查参考资料,自己尝试,甚至巩老师手把手的调教下,一点点地深入了解了其工作原理。我真诚地感激帮助我的老师和师兄们,在认真观察了他们的编写、调试程序和探寻答案的过程后,我真正感叹自己确是菜鸟一个,我简直难以抑制自己的兴奋—--这些经验我像是在信手拈来!在硬件方面,我常常参予到硬件的选择和焊接中去,和队友一起沟通讨论其工作原理以便编写程序,遇到问题时同队友们由软硬件两个方向推敲,从而找到问题所在。我愰然发觉,一些在课本上看起来很容易的内容其实一点不简单,同样地,一些很难的理论知识应用起来其实也不是那么难。
编号: 毕业设计说明书 题目:水草清理装置水下机构 的设计 学院:机电工程学院 专业:机械设计制造及其自动化 学生姓名: 学号: 指导教师: 职称: 题目类型:?理论研究?实验研究?工程设计?工程技术研究?软件开发 2010年5 月24日
针对河道、水塘等水域具有航道窄、面积小,一般的大型水草收割机难以实现水草收割的现状,本文设计了一种结构紧凑,机构传动平稳,效率高,适合在中小尺度水域作业的小型水草收割机。 论文概述了水草收割机的发展背景、研究现状及分类;完成了水草收割机水下部分的机构设计,主要包括清除机构和定位机构;阐述了前置往复式切割器和旋转式升降台的总体设计方案、工作原理、参数计算以及试验校核;同时,为了防止二次污染,本文还另外设计了水草回收装置,通过传送带将水草运回船体;按照任务要求完成了装置总装图与各主要零部件图的绘制;最后,通过Solidworks软件的动画仿真验证了机构设计的合理性。 结果表明:所设计的小型水草收割机具有结构合理、紧凑,适应性强,切割效率高等优点。这种新型的水草收割机可在水下实现切割,捡拾、传送一体化连续作业方式,能够达到清除泛滥的水草,净化水质的目的。总的来说,是一种较为理想的水草收获机具。 关键词:小型水草收割机;水下机构设计;动画仿真
Waters such as rivers,ponds are generally with narrow waterway and small area,so general large aquatic weed harvesters can hardly harvest hydrophytes.To eliminate the current phenomenon, smaller aquatic weed harvester is designed in this paper.It has compact structure, smooth transmission and high efficiency ,at the same time ,it is suitable for working in the small and medium waters. This article summarizes the development background,research status and classification of the aquatic weed harvester.;the mechanism design of underwater part of the aquatic weed harvesters, including clear organization and positioning mechanism,is completed;the paper describes the overall design, working principle, parameter calculation and experimental check of front reciprocating cutter and rotating lift;meanwhile, in order to prevent secondary pollution, the paper also designs of the recovery agencies, the aquatic weeds will be shipped back to the hull through the conveyor belt;w hat’s more,the study also finishes the work of the main device assembly parts drawing.Finally, this pa per’s simulation result proves the rationality of the design with the animation of the software Solidworks. The results show that: the smaller aquatic weed harvester has many advantages of reasonable and compact structrue, high adaptability and high efficiency to harvesting.The new aquatic weed harvesters can realize continuous integration mode such as harvesting,collecting and transmiting under water.It can achieve the goal to clear the flood hydrophytes and to purify water quality. In all,it is an ideal machine of harvesting aquatic weeds. Key words:small aquatic weed harvester;underwater mechanism design;animated simulation
全国大学生电子设计大赛应该怎么准备? 最主要的是学习什么课程::《电工电路基础》《低频电子线路》《数字电路》《高频电子线路》《电子测量》《智能仪器原理及应用》《传感器技术》《电机与电气控制》《信号与系统》《单片机接口原理及应用》等等。所要学习的科目当然不能定局,知识面越广越好,它是对各个科目综合运用的产物,而且要具有非常强的动手和创新能力,对一个人的动手能力有很大的促进作用.学起来不要急于求成,掌握一些基本电路及调试,焊接技术,Protel软件的使用,能制作机器人最好对机械结构方面也要懂些。很多东西只要学习了不一定什么时候就能用到,不要在学时表面感觉没用就不注重它,那样就犯了很大的错误了。在电子DIY学习过程中你会体会到很多乐趣的。要厚积勃发。 全国大学生电子设计大赛应该准备哪些模块? 主要可以针对以下几类准备模块:电源类、信号源类、无线电类、放大器类、仪器仪表类、控制类。 建议现在打好基础,做好知识储备: 1.数电,模电,单片机原理,C语言,这几个是必学的,重要,相当重要。 2.收集相关资料,比如芯片数据手册,应用笔记,源程序,制作实例,现在吧资料积累好了,到时候用起来很方便。 3.多跑电子市场,买些元件回来自己动手做一些东西,锻炼实践能力。 4.看往年电子设计大赛的题目,学习别人设计的长处,最好自己总结下,写成自己的东西。 5.找你们学校以前带电子设计竞赛的老师,告诉他你自己的想法,希望他能给你点建议或者帮助。 6.坚持,坚持,再坚持,克服困难,持之以恒! 这些最基本的东西学好了,等你正式参加比赛的时候,什么ARM,DSP,FPGA等用起来也就不是很困难了!切记,不要赶时髦,追新潮,最基本的东西全掌握了,新东西也不就那么神秘了!! 课程方面: 还要学单片机啊、嵌入式系统、数字电路、CPLD/FPGA设计、C语言、汇编、微机接口 模电要好好学,信号没多大用 CPLD/FPGA编程/模拟用QuartusII 单片机模拟用Proteus 模电模拟用Multisim 单片机编程用Keil,用的C语言和汇编 嵌入式还要用到Linux的内核 还有个画PCB板的,Protel 99SE,现在最新的叫“Altium Designer” 反正这些东西都会要用的,要学起来东西很多,建议你要用到什么看书吧~而且电子设计竞赛都是几个人一组,分工合作吧~ 在此留贴激励自己备战两年后的全国大学生电子设计大赛。在这两年完成自己技能的升级,能力的质变: 1.熟练PCB Layer Out规则(EDA 工具Protel99SE,OR CAD) 2.熟练基于VHDL、AHDL的CPLD、FPGA、GAL的内核设计 3.熟练基于Multisim的电路仿真分析 4.熟练基于MCS-51或其它系列的单片机程序设计(C/A混合编程) 5.熟练基于ASIC 的中小规模时序及组合数字电路设计 6.熟练基于ASIC 的通用模拟及高频通信电路设计 7.熟练基于ASIC 的DA/AD及传感器检测电路设计
摘要 本设计是关于贵州省六盘水市给水排水工程的管网设计,它包括给水排水系统、污水排水系统和雨水排水系统。设计的主要内容和深度应按照基本建设程序及有关的设计规定、规程确定。通常,给水管道系统的主要设计内容包括:设计基础数据(包括设计地区的面积、设计人口数、用水定额)的确定;给水管道系统的平面布置;给水管道系统设计流量计算和水力计算。污水系统采用完全分流制排水系统。污水排水系统的管网设计内容包括划分排水面积,布置管道系统;根据设计人口数和污水定额,计算污水设计流量;根据污水水力计算表进行污水管道的水力计算,确定管径、坡度、流速及埋设深度等设计参数;绘制污水管道平面图和纵剖面图。雨水排水系统的管网设计内容包括划分排水面积,进行雨水管渠定线,确定出水口的位置;划分设计管段,计算各管段设计流量;根据雨水水力计算表进行雨水管渠水力计算,确定管径、坡度、流速及埋设深度等设计参数;绘制雨水管道平面图和纵剖面图。 关键词:排水系统,管道布置,设计参数,水力计算
ABSTRACT The design is on the LiuPanShui in Guizhou Province, drainage pipe network engineering design includes a water supply and drainage system, a sewage drainage system and a stormwater drainage system.Design of the main contents and depth should be in accordance with the basic constructive procedures and relevant designed rules and procedures. Usually, the main designed content of water supply pipeline system includes: basic designed data (including the area of the design area, designed population and water quota) determination; The layout of Water supply pipeline system; Design flow calculation and hydraulic calculation of Water supply piping system. Sewage system is completely separate and drainage system. The pipe network design content of the sewage drainage system includs the division of the drainage area, layout of piping systems; population and sewage fixed according to the design, calculation of sewage design flow; hydraulic calculation of the sewers, the sewage hydraulic computation to determine the diameter, slope, flow rate and buried depth of the design parameters; draw the sewage pipeline plan and profile maps. Stormwater drainage system pipe network designing content includs division of the drainage area for rainwater sewers, fixing line, determing the outlet location; dividing designed tube segment, calculating each pipe segment design discharge; rain hydraulic Computation conduct rainwater pipe channels cut to divert force calculation, and determine the diameter, slope, and flow rate and burial depth design parameters; draw rainwater pipeline plan and longitudinal section diagram. KEY WORDS:Drainage system, Piping layout, Design parameters, hydraulic calculation
2011 年全国大学生电子设计竞赛实验报告 一、实验目的 1、熟练掌握各种常用实验仪器的使用方法。 2、熟悉LM324运放的典型参数及应用。 3、掌握PDF 资料的查询与阅读方法。 4、掌握电子设计与调试的基本流程及方法。 二、实验内容 设计要求: 使用一片通用四运放芯片LM324组成电路框图见图1,实现下述功能: 1. 使用低频信号源产生100.1sin 2()i U f t V =∏,f 0 =500Hz 的正弦波信号,加至 加法器输入端。 2. 自制三角波产生器产生T=0.5ms (±5%),V p-p =4V 的类似三角波信号1o u ,并加至加法器的另一输入端。 3. 自制加法器,使其输出电压U i2 = 10U i1+U o1。 4. 自制选频滤波器,滤除1o u 频率分量,得到峰峰值等于9V 的正弦信号2o u ,2o u 用示波器观察无明显失真。 5.将1o u 和2o u 送入自制比较器,其输出在1K Ω负载上得到峰峰值为2V 的输出电压3o u 。 方案论证与数值计算: 由于电源只能选用+12V 和+5V 两种单电源,由稳压电源供给,而
LM324N具有宽的单电源或双电源工作电压范围,单电源:3-30V,双电源:1.5V-15V,经过试验我们选择双电源供电,所以进行电源的搭建
三角波发生部分: 方案一: 三角波发生器电路按照由方波经过积分电路得到,需要两个放大器,不满足实验要求。 方案二: 利用RC充放电模拟三角波,通过两个电位器分别来调节周期和峰峰值至实验要求的值。达到合理利用现有资源高效达到要求的目的。因此我们采用方案二。题目要求三角波发生器产生的周期为T=0.5ms,Vpp=4V的类似三角波。我们由公式T=2*R14*C1*ln(1+2*R3/R15)另外运放1端输出电压设为U,则Uo1=(R15/(R15+R1))*U。选取电容为较常见的47nf , 计算得R1=2R14;R14=0-5K,所以取R1为0-10k;得到R15=0-10K; 加法器部分
程控增益放大器(B题) 程控增益放大器 摘要:本设计采用带通滤波器来选择输入信号带宽滤除杂质。以工作稳定、性能指标较高的STC89C52RC单片机作为微控制器核心来控制选择DDS模块的信号输出、放大器步进选择以及液晶显示。用两个AD603为放大电路核心组成级联放大电路,通过单片机控制DAC0832将数字量转化为模拟量来进行程控放大,提高了放大增益、扩展了通频带宽、而且具有良好的抗噪声系数。放大器带宽可以预置并显示,经测试本设计基本满足题目要求。 关键词:STC89C52RC AD603 程控放大器 AD9850 带通滤波 目录 1、引言: 1 2、方案设计: 1 2.1 总方案框图 1 2.2 DDS模块选择 1 2.3 滤波电路的选择 2 2.4 增益控制部分,放大器的选择 2 3、设计实现: 2
3.1 硬件设计 2 3.1.1 最小系统设计 3 3.1.2 滤波电路 3 3.1.4 放大电路 3 3.1.5 数模转换,电压输出电路 4 3.2软件设计 4 4、测试: 5 4.1、测试方法 5 4.2、测试条件 5 4.3、测试仪器 5 4.4、测试结果 6 5、结论及体会: 6 5.1 结论 6 5.2 体会 6 参考文献: 7 附录一: 8 1 最小系统和按键模块电路原理图 8
2 滤波电路原理图 8 3 自制DDS模块及其外围电路系统原理图 9 4 增益控制电路原理图 10 5 DAC8032数模转换电路图 11 附录二:主要源程序 12 1、引言: 放大器是电子系统中最基本的单元电路,放大器的增益又是其中一个重要的性能参数,随着电路控制的日益精细,对放大器增益的控制和调整也变得越来越细致。程控增益放大器与普通放大器的差别在于反馈电阻网络可变且受控于控制接口的输出信号。不同的控制信号,将产生不同的反馈系数,从而改变放大器的闭环增益。通过单片机用程序来控制放大的增益,通过键盘输入放大倍数,再利用单片机输出相应的数字信号,然后通过DA变换,换成模拟电压信号,使用这个电压信号来控制放大器的放大倍数,实现了程控增益放大。在灵活性方便性上远远优于传统的放大器。 2、方案设计: 2.1 总方案框图 Ui 本系统原理方框图如图2.1所示。本系统由DDS模块、51单片机、滤波电路、键
探头不得再移动。(30分) (2)将1角硬币更换成直径约25mm的镀镍钢芯1元硬币(第五套人民币1元硬币),重复要求(1)的探测过程。定位完成后,定位指针与硬币圆心之间的定位误差应控制在5mm以;探测定位速度越快越好,探测定位总时间不应超过2分钟。完成定位时给出声-光指示,此后探头不得再移动。(30分) (3)将硬币改为自制圆铁环(用Φ2铁丝绕制),铁环外直径4cm。重复要求(1)的探测过程,应使定位指针尽可能指向铁环圆心,定位误差应
控制在5mm以内;完成定位时给出声-光指示,此后探头不得再移 动,探测定位总时间应不超过3分钟。(30分) (4)其他自主发挥功能。(10分) (5) 3.说明 (1)金属物体探测定位装置探头采用AY-LDC1000板(由TI公司提供),可直接用AY-LDC1000板上的覆铜线圈,也可自制线圈;不得安装其 他传感与摄像装置。探测开始后,不得手动或遥控探测器。 (2)玻璃板可采用普通无色玻璃(玻璃边沿需贴上胶带以防划伤),也可用无色透明有机玻璃板;玻璃板长宽尺寸应大于50cm、厚度约 3mm。 (3)探头从“探头进入区”一侧进入时探头的起始位置和摆放方向,以及探测区域内的被测金属物体摆放位置均由测试专家在现场指定。 2014年TI杯大学生电子设计竞赛题 C题:锁定放大器的设计 1.任务 设计制作一个用来检测微弱信号的锁定放大器(LIA)。锁定放大器基本组成框图见图1。 信号通道
2.要求 (1)外接信号源提供频率为1kHz 的正弦波信号,幅度自定,输入至参考信 号R (t )端。R (t )通过自制电阻分压网络降压接至被测信号S (t )端,S (t )幅度有效值为 10μV ~1mV 。(5分) (2)参考通道的输出r (t )为方波信号,r (t )的相位相对参考信号R (t )可连续或 步进移相180度,步进间距小于10度。(20分) (3)信号通道的3dB 频带范围为900Hz ~1100Hz 。误差小于20%。(10分) (4)在锁定放大器输出端,设计一个能测量显示被测信号S (t )幅度有效值的 电路。测量显示值与S (t )有效值的误差小于10%。(15分) (5)在锁定放大器信号S (t )输入端增加一个运放构成的加法器电路,实现S (t ) 与干扰信号n (t )的1:1叠加,如图2所示。(5分) (6)用另一信号源产生一个频率为1050~2100Hz 的正弦波信号,作为n (t )叠 加在锁定放大器的输入端,信号幅度等于S (t )。n (t )亦可由与获得S (t )同样结构的电阻分压网络得到。锁定放大器应尽量降低n (t )对S (t )信号有效值测量的影响,测量误差小于10%。(20分) (7)增加n (t )幅度,使之等于10S (t ),锁定放大器对S (t )信号有效值的测量误 差小于10%。(20分) (8)其他自主发挥。(5分) (9)设计报告。(20分) 图2 锁定放大器叠加噪声电路图 S (t ) n (t )
毕业设计论文 作者学号 系部 专业 题目 指导教师 评阅教师 完成时间:
毕业设计(论文)中文摘要
毕业设计(论文)外文摘要
目录 1 绪论 (1) 1.1J AVA语言的特点 (1) 1.2开发工具E CLIPSE介绍 (2) 1.3开发工具JDK介绍 (2) 1.4应用环境 (3) 2 系统需求分析 (3) 2.1需求分析 (3) 2.2可行性分析 (3) 3 系统概要设计 (4) 3.1游戏流程图 (4) 3.2设计目标 (5) 3.3系统功能模块 (5) 3.4系统数据结构设计 (7) 4 系统详细设计 (10) 4.1程序设计 (10) 4.2贪吃蛇游戏各功能界面截图 (13) 5 系统测试 (16) 5.1测试的意义 (16) 5.2测试过程 (16) 5.3测试结果 (17) 结论 (18) 致谢 (19) 参考文献 (19)
1 绪论 贪吃蛇是世界知名的益智类小游戏,选择这个题目一方面是为了将我们自己的所学知识加以运用;另一方面,我希望通过自己的所学知识把它剖析开来,通过自己的动手实践,真正的了解它的本质和精髓。希望通过这次实践,能从中提高自己的编程能力。并从中学会从零开始分析设计程序,达到学以致用,活学活用的目的。另外,通过本游戏的开发,达到学习Java技术和熟悉软件开发流程的目的。 本游戏的开发语言为Java,开发工具选用Eclipse。 Java是一种简单的,面向对象的,分布式的,解释型的,健壮安全的,结构中立的,可移植的,性能优异、多线程的动态语言。这里采用Java作为开发语言主要是基于Java的面向对象和可移植性。 Eclipse 是一个开放源代码的、基于 Java 的可扩展开发平台。就其本身而言,它只是一个框架和一组服务,用于通过插件组件构建开发环境。 1.1 Java语言的特点 1.1.1 简单性 Java与C++语言非常相近,但Java比C++简单,它抛弃了C++中的一些不是绝对必要的功能,如头文件、预处理文件、指针、结构、运算符重载、多重继承以及自动强迫同型。Java 实现了自动的垃圾收集,简化了内存管理的工作。 1.1.2 平台无关性 Java引进虚拟机原理,并运行于虚拟机,实现不同平台之间的Java接口。Java的数据类型与机器无关。 1.1.3 安全性 Java的编程类似C++,但舍弃了C++的指针对存储器地址的直接操作,程序运行时,内存由操作系统分配,这样可以避免病毒通过指针入侵系统。它提供了安全管理器,防止程序的非法访问。 1.1.4 面向对象 Java吸收了C++面向对象的概念,将数据封装于类中,实现了程序的简洁性和便于维护性,使程序代码可以只需一次编译就可反复利用。
1系统方案设计与论证 1.1设计要求 (1)设计一个可根据电源线的电参数信息分析用电器类别和工作状态的装置,电器电流范围 0.005A – 10.0A,用电器包括LED 灯、节能灯、USB 充电器(带负载)、无线路由器、机顶盒、电风扇、热水壶。 (2)可识别的电器工作状态总数不低于 7,电流不大于 50mA 的工作状态数不低于 5,同时显示所有可识别电器的工作状态。自定可识别的电器种类,包括一件最小电流电器和一件电流大于 8A 的电器,并完成其学习过程。 (3)实时指示用电器的工作状态并显示电源线上的电特征参数,响应时间不大于2s。特征参量包括电流和其他参量,自定义其他特征参量的种类、性质,数量自定。电器 的种类及其工作状态、参量种类可用序号表示。 (4)随机增减用电器或改变使用状态,能实时指示用电器的类别和状态。 (5)具有学习功能。清除作品存储的所有特征参数,重新测试并存储指定电器的特征参数。一种电器一种工作状态的学习时间不大于 1 分钟。 1.2设计基本思路 题目要求设计可根据电参数分析用电器类别的装置,区分用电器的方法可以是电流的 大小,电压电流的相位差。因此,装置采用ZMPT101B电压互感器、ZMCT103C电流 互感器采集电压电流信息,判断用电器类型,并经28027单片机程序控制在显示屏显示。该装置可以检测键盘的输入,处于学习、识别两种不同模式,存储信息的模块采 用AT24C64,存储用电器的信息。为完成便携终端信息的接收和提示,系统还加入蜂 鸣器和WIFI无线传输模块。 1.3系统框图 1.4方案比较与选择 (1)控制器 方案一:TMS320F28027是一种高效 32 位中央处理单元,具有分析和断点功能。可 以借助硬件进行实时调试。60MHz器件,3.3V 单电源集成型加电和欠压复位,两个内部 零引脚振荡器多达 22 个,复用通用输入输出 (GPIO) 引脚三个,32 位 CPU 定时器片载 闪存、SRAM、一次性可编程 (OTP) 内存。
2014年TI杯大学生电子设计竞赛题(多省联赛) A题:四旋翼飞行器 1.任务 设计制作一架能够自主飞行的四旋翼飞行器。 2.要求 四旋翼飞行器能够完成以下飞行动作: (1)飞行器能够根据起飞前预置的指令起飞,飞离地面高度应超过30cm,飞行距离(水平)应超过60cm,然后飞行器应能平稳降落。(30分) (2)飞行器能够根据指定(键盘设定)的飞行高度及降落地点(方向及距离)连续稳定地完成起飞、指定高度水平飞行、平稳降落等动作。(20分) (3)飞行器能够根据起飞前预置的指令垂直起飞,起飞后能够在50cm以上高度平稳悬停5s以上,然后再平稳缓慢降落到起飞地点;起飞与降落地点水平距离 不超过30cm。(30分) (4)其他自主发挥设计的飞行动作。(20分) (5)设计报告(20分) 项目主要内容分数 系统方案方案比较,方案描述 5 设计与论证飞行器姿态测量方法 飞行控制器控制方法与参数计算8 测试测试方法与测试结果 5 设计报告结构及规范性摘要,正文结构完整性、内容规范性 2 小计20 3.说明 (1)飞行器的姿态检测及飞行控制必须使用TI 公司的TIV A M4、C2000或MSP430等系列控制器。 (2)飞行器在完成每一项飞行动作期间不得以任何方式进行人为干预,如遥控等。 (3)飞行器的尺寸可自行选定。 (4)飞行方向以正北方向为0°、东北方向为45°、正东方向为90°等,以此类推;距离的单位为厘米(cm)。 (5)指定的降落地点是指降落地点距起飞地的水平距离及方向。 (6)平稳降落是指在降落过程中无明显的跌落、弹跳及着地后滑行等情况出现。 (7)能够完成要求(2)时,要求(1)可以免测。 (8)为确保安全,飞行器应在安全网中或在系留方式下工作(即以绳索将飞行器拴在地面固定物上)。
毕业设计(论文) 题目:从社会历史发展比较西方个人主义与中国集体主义 2014年5月8日
毕业设计(论文)诚信声明书 本人声明:本人所提交的毕业论文《 》是本人在指导教师指导下独立研究、写作的成果,论文中所引用他人的无论以何种方式发布的文字、研究成果,均在论文中加以说明;有关教师、同学和其他人员对本文的写作、修订提出过并为我在论文中加以采纳的意见、建议,均已在我的致谢辞中加以说明并深致谢意。 本论文和资料若有不实之处,本人承担一切相关责任。 论文作者:(签字)时间:年月日 指导教师已阅:(签字)时间:年月日
郑州旅游职业学院毕业设计(论文) 摘要 东西方各个国家都拥有深厚文明历史和强大经济实力,所以东西方文化在许多方面存在差异。随着东西方交往在广度和深度上的不断加强, 它们之间的相互依赖关系程度也在不断加强,人们开始意识到东西方文化间的相互影响正在成为一个引导国际生活模式的十分重要的力量,因此,对文化差异的研究也变得更为重要。个人主义和集体主义是理解东西方文化的一个重要因素,被广泛地用于解释人们在行为上的文化差异,揭示了两种文化的主要差异。在我们仅仅了解文化中看得见的一部分时,往往忽视了藏于表面之下的另一更大的部分,这很容易使人从看到的那部分轻易得出一个其实并不完全正确的判断,或形成一种僵化的思维模式和偏见,或产生过于绝对化的看法,有时甚至产生文化有优劣之分的看法。因此研究文化的差异是一件看似简单却不容易的事情。个人主义与集体主义的差别,是西方文明与中华文明存在差异的一个主要标志,也是一个重要的基础性差异,由此导致了双方在政治制度、社会形态、哲学、宗教、科学等等各个方面的差异。分析西方的个人主义和中国的集体主义可以揭示两种文化的实质以及两种社会所面临问题的根源,帮助我们更好地了解中西方的社会和文化,更加有效地避免文化冲突。中西方个人主义和集体主义价值观的差异也可促使异质文化取长补短、交汇融合。因此研究中西方价值观中的西方个人主义和中国集体主义的差异就显得尤为重要。 关键词:文化;个人主义;集体主义
2013年全国大学生电子设计竞赛 简易旋转倒立摆及控制装置(C题) 【本科组】 摘要: 通过对该测控系统结构和特点的分析,结合现代控制技术设计理念实现了以微控制器MC9S12XS128系列单片机为核心的旋转倒立摆控制系统。通过采集的角度值与平衡位置进行比较,使用PD算法,从而达到控制电机的目的。其工作过程为:角位移传感器WDS35D通过对摆杆摆动过程中的信号采集然后经过A/D采样后反馈给主控制器。控制器根据角度传感器反馈信号进行PID数据处理,从而对电机的转动做出调整,进行可靠的闭环控制,使用按键调节P、D的值,同时由显示模块显示当前的P、D值。 关键字: 倒立摆、直流电机、MC9S12XS128单片机、角位移传感器WDS35D、PD算法
目录 一、设计任务与要求 (3) 1 设计任务 (3) 2 设计要求 (3) 二系统方案 (4) 1 系统结构 (4) 2 方案比较与选择 (4) (1)角度传感器方案比较与选择 (4) (2)驱动器方案比较与选择 (5) 三理论分析与计算 (5) 1 电机的选型 (5) 2 摆杆状态检测 (5) 3 驱动与控制算法 (5) 四电路与程序设计 (6) 1 电路设计 (6) (1)最小系统模块电路 (6) (2)5110显示模块电路设计 (6) (3)电机驱动模块电路设计 (6) (4)角位移传感器模块电路设计 (6) (5)电源稳压模块设计 (7) 2 程序结构与设计 (8)
五系统测试与误差分析 (8) 测试方案 (8) 测试使用仪器 (8) 测试结果与误差分析 (9) 6 结论 (10) 参考文献 (10) 附录1 程序清单(部分) (11) 附录2 主板电路图 (13) 附录3 主要元器件清单 (13) 一、设计任务与要求 1 设计任务 设计并制作一套简易旋转倒立摆及控制装置。旋转倒立摆的结构如图1所示。电动机A固定在支架B上,通过转轴F驱动旋转臂C旋转。摆杆E通过转轴D固定在旋转臂C 的一端,当旋转臂C在电动机A驱动下作往复旋转运动时,带动摆杆E在垂直于旋转臂C 的平面作自由旋转。如下图所示 2 设计要求 基本要求:①摆杆从处于自然下垂状态开始,驱动电机带动旋转臂作往复旋转使摆杆摆动,并尽快使摆角达到或超过﹣60°~+60°;②从摆杆处于下垂状态开始,尽快增大摆杆的摆动幅度,直至完成圆周运动;③在摆杆处于自然下垂状态下,外力拉起摆杆至接近165°位置,外力撤出同时,启动控制旋转臂使摆杆保持倒立状态时间不少于5s;期间旋转臂的转动不大于90°。 发挥部分:①从摆杆处于自然下垂状态开始,控制旋转臂作往复旋转运动,尽快使摆杆摆起倒立,保持倒立时间不少于10s;②在摆杆保持倒立状态下,施加干扰后摆杆能继续保持倒立或2s内回复倒立状态;③在摆杆保持倒立状态的前提下,旋转臂作圆周运动,并尽快使单方向转过角度达到或超过360°。
南京林业大学 第二组
简易小车(C题) 摘要:本设计以设计题目的要求为目的,采用STC单片机(STC12C5604AD)作为智能小车的控制和检测核心,实现小车的路线识别、快慢速行驶等功能,采用SRWF-501无线通信模块实现两辆小车的无线通讯,选择正确的行进路线超车等功能。采用反射式光电传感器(ITR200001-T)感知与木工板面颜色有较大差别的胶带边框作为引导。运用高电压大电流的全桥驱动芯片L298N作为电机驱动芯片,驱动电机采用直流减速电机,电机控制方式为单向PWM控制。整个电路设计简单,可靠性高。 关键词:智能控制光电检测无线通讯 PWM脉宽调制智能小车 Simple Intelligentized Electric Motors Automobile Abstract :This design that focus on the competition task as the purpose, based on the single chip, STC12C5604AD, which is the center of controlling and detection of the intelligent car, to achieve the function of track identification and alterable speed. The design is used the wireless model SRWF-501 to realize two intelligent cars’ wireless communication and choosing the right movement track to overtake. To use the reflected photoelectric sensor and the rubber belt frame which has an obvious distinguish with the wood board as the guidance. The drive dynamo apply the style of direct current and ability of slowing down, the way of controlling dynamo is controlling of PWM. The whole circuit has a clear and simple design and also high quality. Key word: intelligently control, reflecting-infrared sensors, wireless communication ,PWM, intelligent automobile
2017年全国大学生电子设计竞赛 XXXXXXXXXXXXX(X题) 【本科组】 2017年9月7日
摘要 本系统以飞思卡尔单片机MC9S12XS128作为主控制芯片,通过数字摄像头OV7620采集靶面图像,进行图像信息的处理,得到靶面上弹着点的位置信息,并在OLED上显示弹着点的环数、方位。同时为了方便摄像头的图像的校准,设计了激光三点定位装置。另外设计了以步进电机和直流减速电机驱动的二维激光头移动调节架,通过按键控制可实现激光点在靶面上的移动、自动中心打靶、定位打靶。 关键词:激光打靶单片机数字摄像头步进电机 Abstract This system adopts the Freescale MCU(MC9S12XS128) as the core processing chip, target surface image are gained by the digital camera OV7620, the spot position information on the target is got after the image information processing, the ring number and location are displayed on the OLED. At the same time , in order to facilitate the image of the calibration of cameras, the laser at 3 o 'clock positioning device is designed. In addition , step motor and DC gear motor are designed to drive 2D position control frame, it can be realized through the key control that the laser spot on the target mobile, automatic target and hit the bull 's-eye, automatic positioning. Key words: laser-shooting microcomputer digital camera step motor 电子设计大赛论文报告格式 **设计报告内容: 1.封面:单独1页(见样件) 2.摘要、关键词:中文(150~200字)、英文;单独1页 3.目录:内容必要对应页码号 4.设计报告正文: 一、前言: 二、总体方案设计: 包括方案比较、方案论证、方案选择 (以方框图的形式给出各方案,并简要说明) 三、单元模块设计: