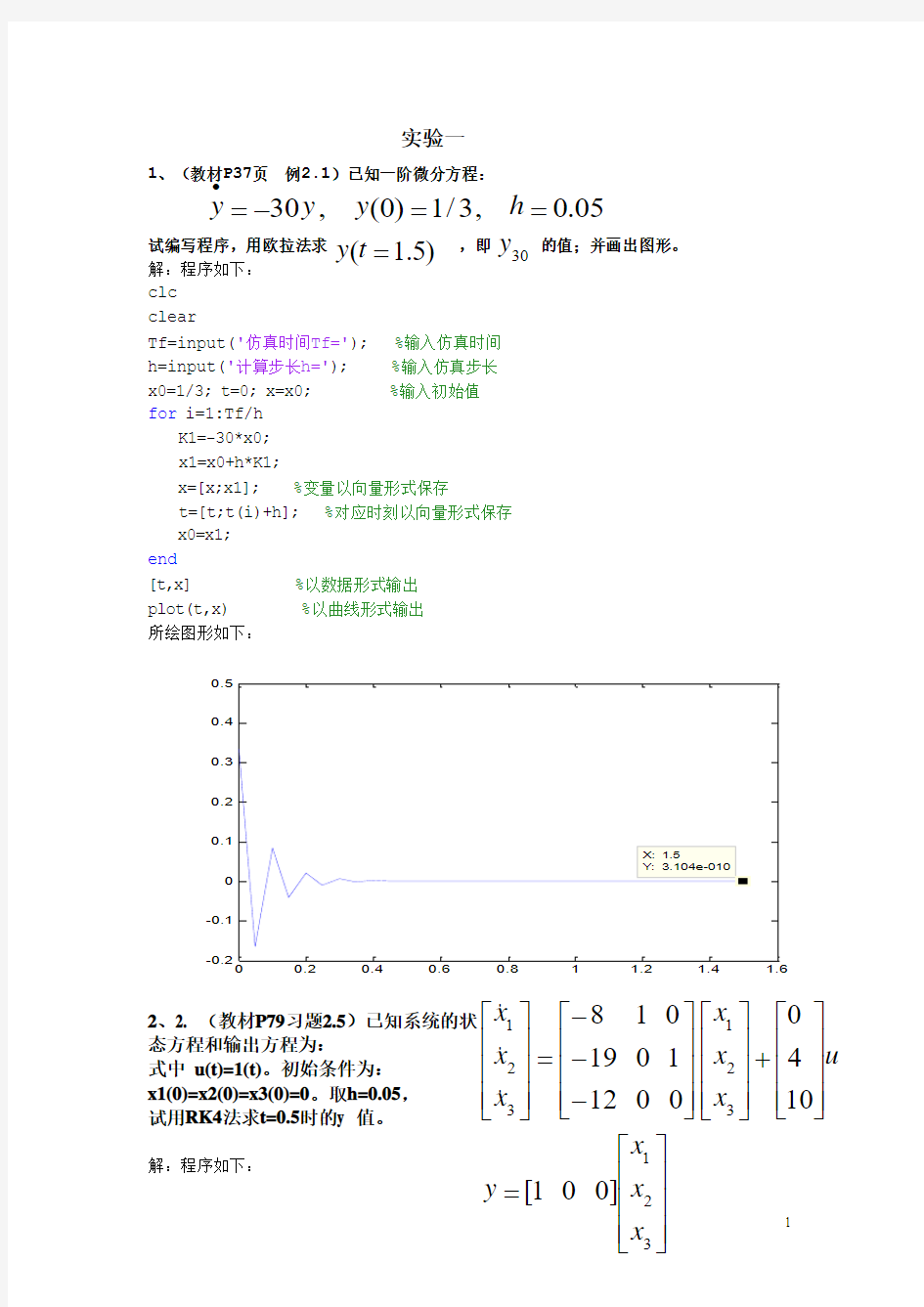
实验一 1、(教材P37页 例2.1)已知一阶微分方程:
试编写程序,用欧拉法求 ,即
的值;并画出图形。 解:程序如下: clc clear
Tf=input('仿真时间Tf='); %输入仿真时间 h=input('计算步长h='); %输入仿真步长 x0=1/3; t=0; x=x0; %输入初始值 for i=1:Tf/h K1=-30*x0; x1=x0+h*K1;
x=[x;x1]; %变量以向量形式保存
t=[t;t(i)+h]; %对应时刻以向量形式保存 x0=x1; end
[t,x] %以数据形式输出 plot(t,x) %以曲线形式输出 所绘图形如下:
00.20.40.60.81 1.2 1.4 1.6
-0.2
-0.1
0.1
0.2
0.3
0.4
0.5
X: 1.5
Y: 3.104e-010
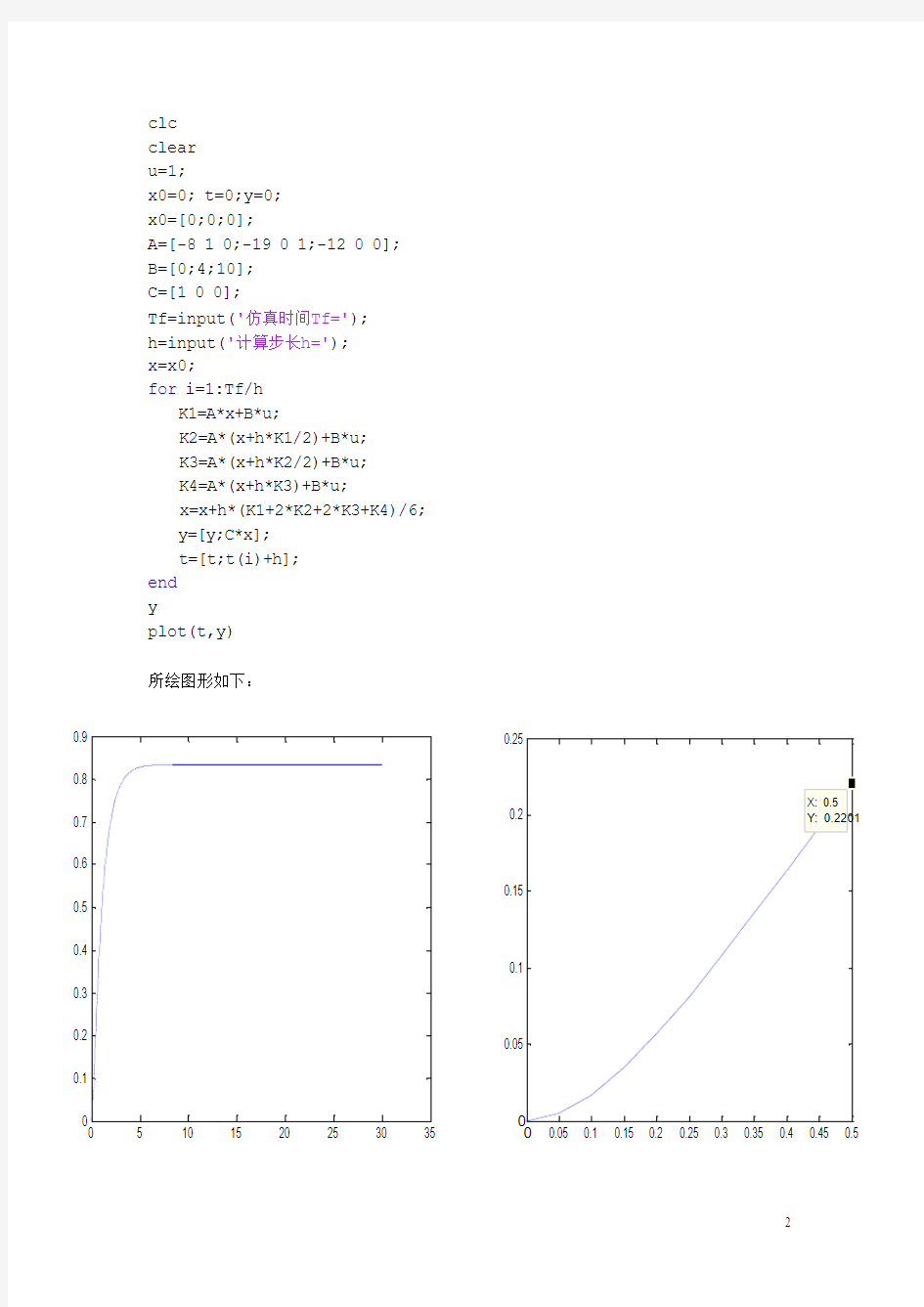
2、2. (教材P79习题2.5)已知系统的状 态方程和输出方程为: 式中 u(t)=1(t)。初始条件为: x1(0)=x2(0)=x3(0)=0。取h=0.05, 试用RK4法求t=0.5时的y 值。
解:程序如下:
05
.0,3/1)0(,
30==-=?
h y y y )5.1(=t y 30y ????=??
????
????+????????????????????---=??????????21321321]0 0 1[1040 0 0 121 0 190 1
8x x y u x x x x x x
clc clear u=1;
x0=0; t=0;y=0; x0=[0;0;0];
A=[-8 1 0;-19 0 1;-12 0 0]; B=[0;4;10]; C=[1 0 0];
Tf=input('仿真时间Tf='); h=input('计算步长h='); x=x0;
for i=1:Tf/h K1=A*x+B*u;
K2=A*(x+h*K1/2)+B*u; K3=A*(x+h*K2/2)+B*u; K4=A*(x+h*K3)+B*u;
x=x+h*(K1+2*K2+2*K3+K4)/6; y=[y;C*x]; t=[t;t(i)+h]; end y
plot(t,y)
所绘图形如下:
05101520253035
0.10.20.30.4
0.50.6
0.70.80.900.050.10.150.20.250.30.350.40.450.5
00.05
0.1
0.150.2
0.25
X: 0.5Y: 0.2201
3、已知系统的传递函数, 试求其状态方程及输出方程。 (教材P26页 习题1.7 )
解:程序如下: den=[1 3];
num=[1 3 3 1];
[A,B,C,D]=tf2ss(den,num) 运行结果如下: A =
-3 -3 -1 1 0 0 0 1 0 B =
1 0 0 C =
0 1 3 D =
4、已知线性定常系统的状态方程
及输出方程,试求系统的传递函数。 (教材P26页 习题1.8 ) 解:程序如下:
A=[-1 1 0;0 -1 0;0 0 -2];
B=[0;0;1];
C=[1 0 1];
[den,num]=ss2tf(A,B,C,D)
运行结果如下:
1
333
)(2
3
++++=s s s s s G ????
??????=??
????????+????????????????????--=??????????321321321]1 0 1[100 2- 0 0 0 1 0 0 1 1x x x y u x x x x x x
den =
0 1 2 1
num =
1 4 5 2
5、(教材P48页例2.4 )如图所示的直流电机拖动系统,试在SIMULINK环境下建立系统仿真模型:
1)采用欧拉法与四阶龙格库塔法进行仿真,并确定其步长的稳定区间,取不同步长比较仿真结果;
2)采用RK4研究外环PI控制器参数的改变(0.17 0.5 1 1.5),观其阶跃响应对系统动态参数的影响。
(1)、欧拉法
clc
clear
Tf=10; %输入仿真时间
h=input('计算步长h='); %输入仿真步长
P=[1 0.01 0.1 0;
0 0.85 1 0.17;
1 0.01 1 0;
0 0.051 1 0.15;
1 0.0067 70 0;
1 0.15 0.21 0;
0 1 130 0;
1 0.01 0.1 0;
1 0.01 0.0044 0]; %输入各环节参数
W0=zeros(9,1);W0(1,1)=1; %输入外部链接矩阵
W=zeros(9,9);W(2,1)=1;W(2,9)=-1;W(3,2)=1;W(4,3)=1;
W(4,8)=-1;W(5,4)=1;W(6,5)=1;W(6,7)=-0.212;W(7,6)=1;
W(8,6)=1;W(9,7)=1; %输入系统连接矩阵
A=diag(P(:, 1));B=diag(P(:, 2));
C=diag(P(:, 3));D=diag(P(:, 4)); %生成系数矩阵 Q=B-D*W;Q1=inv(Q); R=C*W-A; V=C*W0;
A1=Q1*R; B1=Q1*V; %生成闭环系数矩阵 C1=[0 0 0 0 0 0 1 0 0];
u=1; %阶跃输入幅值
x0=zeros(9,1); t=0;y=0; %设置初值 x=x0;
for i=1:Tf/h
K1=A1*x+B1*u; x=x+h*K1; y=[y;C1*x]; t=[t;t(i)+h]; end
plot(t,y)
计算步长h=0.011 计算步长h=0.012
0123456789100
51015
20
25
303540
012345678910
-2
-1.5-1-0.5
0.511.522.5x 10
50
四阶龙格库塔法: clc clear
Tf=input('仿真时间Tf='); %输入仿真时间 h=input('计算步长h='); %输入仿真步长 P=[1 0.01 0.1 0; 0 0.85 1 0.17; 1 0.01 1 0;
0 0.051 1 0.15; 1 0.0067 70 0; 1 0.15 0.21 0; 0 1 130 0;
1 0.01 0.1 0;
1 0.01 0.0044 0]; %输入各环节参数 W0=zeros(9,1);W0(1,1)=1; %输入外部链接矩阵
W=zeros(9,9);W(2,1)=1;W(2,9)=-1;W(3,2)=1;W(4,3)=1; W(4,8)=-1;W(5,4)=1;W(6,5)=1;W(6,7)=-0.212;W(7,6)=1; W(8,6)=1;W(9,7)=1; %输入系统连接矩阵 A=diag(P(:, 1));B=diag(P(:, 2));
C=diag(P(:, 3));D=diag(P(:, 4)); %生成系数矩阵 Q=B-D*W;Q1=inv(Q); R=C*W-A; V=C*W0;
A1=Q1*R; B1=Q1*V; %生成闭环系数矩阵 C1=[0 0 0 0 0 0 1 0 0];
u=1; %阶跃输入幅值
x0=zeros(9,1); t=0;y=0; %设置初值 x=x0;
for i=1:Tf/h
K1=A1*x+B1*u;
K2=A1*(x+h*K1/2)+B1*u; K3=A1*(x+h*K2/2)+B1*u; K4=A1*(x+h*K3)+B1*u;
x=x+h*(K1+2*K2+2*K3+K4)/6; y=[y;C1*x]; t=[t;t(i)+h]; end
plot(t,y)
仿真时间Tf=20 仿真时间Tf=5 仿真时间Tf=100 计算步长h=0.015 计算步长h=0.015 计算步长h=0.016
02468101214161820
510152025303540
00.51 1.52 2.53 3.54 4.55
510
1520253035
40020406080100120
-18
-16
-14-12
-10-8-6-4-202x 10
302
(2)、
clc
clear
Tf=input('仿真时间Tf='); %输入仿真时间
h=input('计算步长h='); %输入仿真步长
P=[1 0.01 0.1 0;
0.17 0.5 1 1.5;
1 0.01 1 0;
0 0.051 1 0.15;
1 0.0067 70 0;
1 0.15 0.21 0;
0 1 130 0;
1 0.01 0.1 0;
1 0.01 0.0044 0]; %输入各环节参数
W0=zeros(9,1);W0(1,1)=1; %输入外部链接矩阵
W=zeros(9,9);W(2,1)=1;W(2,9)=-1;W(3,2)=1;W(4,3)=1; W(4,8)=-1;W(5,4)=1;W(6,5)=1;W(6,7)=-0.212;W(7,6)=1; W(8,6)=1;W(9,7)=1; %输入系统连接矩阵
A=diag(P(:, 1));B=diag(P(:, 2));
C=diag(P(:, 3));D=diag(P(:, 4)); %生成系数矩阵
Q=B-D*W;Q1=inv(Q);
R=C*W-A; V=C*W0;
A1=Q1*R; B1=Q1*V; %生成闭环系数矩阵
C1=[0 0 0 0 0 0 1 0 0];
u=1; %阶跃输入幅值
x0=zeros(9,1); t=0;y=0; %设置初值
x=x0;
for i=1:Tf/h
K1=A1*x+B1*u;
K2=A1*(x+h*K1/2)+B1*u;
K3=A1*(x+h*K2/2)+B1*u;
K4=A1*(x+h*K3)+B1*u;
x=x+h*(K1+2*K2+2*K3+K4)/6;
y=[y;C1*x];
t=[t;t(i)+h];
end
plot(t,y)
仿真时间Tf=20 计算步长h=0.015
02468101214161820
5
10
15
20
25
30
仿真时间Tf=5 计算步长h=0.015
00.51 1.52 2.53 3.54 4.55
5
10
15
20
25
30
SIMULINK 仿真
0.0044
0.01s+1
0.10.01s+1
130s
0.210.15s+1
700.00167s+1
0.15s+10.051s
10.01s+1
0.17s+10.85s
0.10.01s+1
y1To Workspace
Saturation1
0.212
0.00440.01s+1
0.10.01s+1
130
s
0.21
0.15s+170
0.00167s+10.15s+10.051s
10.01s+1
0.17s+10.85s
0.10.01s+1
y1To Workspace
0.212
实验二
1、已知某四阶非线性系统结构框图如图1所示。当系统输入幅值为10的阶跃信号时,试仿真分析系统输出响应:
1)在SIMULINK 环境下建立仿真模型,输出仿真结果;
2)采用MATLAB 语言编程实现仿真程序,与1)进行结果比较;
3)在第一环节前加饱和非线性环节,分析限幅C1=6、2时系统的输出响应,并与没限幅前比较其超调、峰值时间及调节时间。
解:(1)SIMULINK 图形如下
1
0.1s+11
0.5s+11s s+0.785s+0.16
1
s
s+0.785s+0.16
10.1s+1
10.5s+1
1s
s+0.785s+0.16
10.1s+1
10.5s+1
10.1s+1
10.5s+1
1s
s+0.785s+0.16
Saturation1
Saturation
(2)
子程序:satura.m
function uc=satura(ur,s1)
%ur=1;s1=5;
if (ur>=s1)
uc=s1;
elseif (ur<=-1*s1)
uc=-1*s1;
else uc=ur;
end
子程序:dead.m
function uc=dead(ur,s1)
%ur=-1.5; s1=0.5;
if (abs(ur)>=s1)
if (ur>0)
uc=ur-s1;
else uc=ur+s1;
end
else uc=0;
End
主程序:
clc
clear
Tf=20; %输入仿真时间
h=0.01; %输入仿真步长
z=input('非线性标志向量z='); %输入非线性标志向量
c1=input('饱和非线性环节限幅c1=');%输入饱和非线性环节参数
a1=6;%输入死区非线性环节参数
P=[0.16 1 0.785 1;
0 1 1 0;
1 0.5 1 0;
1 0.1 1 0]; %输入各环节参数
A=P(:,1);B=P(:,2);C=P(:,3);D=P(:,4);
W0=zeros(4,1);W0(1,1)=1; %输入外部链接矩阵
W=zeros(4,4);W(1,4)=-1;W(2,1)=1;W(3,2)=1;W(4,3)=1;
for i=1:4
if(A(i)==0);
F(i)=1;
G(i)=h*C(i)/B(i);
H(i)=0.5*h*h*C(i)/B(i);
if (D(i)==0)
C1(i)=1;D1(i)=0;
else
C1(i)=1;D1(i)=D(i)/B(i); %求积分、比例积分环节离散系数
end
else
F(i)=exp(-h*A(i)/B(i));
if (D(i)==0)
G(i)=(1- F(i))*C(i)/A(i);
H(i)=h*C(i)/A(i)-G(i)*B(i)/A(i);
C1(i)=1;D1(i)=0;
else
G(i)=(1- F(i))*D(i)/A(i);
H(i)=h*D(i)/A(i)-G(i)*B(i)/A(i);
C1(i)=C(i)/D(i)-A(i)/B(i);
D1(i)=D(i)/B(i); %求惯性、比例惯性环节离散系数end
end
end
%F1=diag(F(:, 1));G1=diag(G(:, 1));H1=diag(H(:, 1)); %C2=diag(C1(:, 1));D2=diag(D1(:, 1));
%求各环节输入
Y=zeros(4,1);X=Y;y=zeros(1,4);r=10;Uk=zeros(4,1);
t=0:h:Tf; N=length(t); %求采样点个数
for k=1:N-1
Ub=Uk; %保存前一次输入
Uk=W*Y+W0*r; %求当前个环节输入v
for i=1:4;
if(z(i)~=0)
if(z(i)==1)
Uk(i,1)=satura(Uk(i,1),c1);
end
if(z(i)==2)
Uk(i,1)=dead(Uk(i,1),a1);
end
end
end
Udot=(Uk-Ub)/h; %求当前各环节输入导数
Uf=2*Uk-Ub; %求下一拍输入
%求各环节状态变量及输出
X=F'.*X+G'.*Uk+H'.*Udot;
Y=C1'.*X+D1'.*Uf;
for i=1:4;
if(z(i)~=0)
if(z(i)==3)
Y(i,1)=satura(Y(i,1),c1);
end
if(z(i)==4)
Y(i,1)=dead(Y(i,1),a1); end end end
y=[y;Y']; end
y4=y(:,4); plot(t,y4)
非线性标志向量z=[0 0 0 0] 饱和非线性环节限幅c1=6
02468101214161820
246810121416X: 2.74Y: 15.17
(3)
非线性标志向量z=[1 0 0 0] 饱和非线性环节限幅c1=6
02468101214161820
5
10
15
X: 3.12Y: 14.7
非线性标志向量z=[1 0 0 0] 饱和非线性环节限幅c1=2
2468101214161820
02
4
6
8
10
12
14
X: 4.91Y: 13.18
2、 某控制系统如图所示,选择增益K 的值,使系统阶跃响应的超调整量小于20%,且调节时间小于5 s 。(教材P80习题2.11)
解:SIMULINK 图形如下:
K(s+1)(s+1)(s+8)(s+20)
Zero-Pole
1
s +3.2s +3.56s 32Transfer Fcn
Step
Scope
1550(s+1)(s+1)
(s+8)(s+20)
Zero-Pole 1
s +3.2s +3.56s 32Transfer Fcn Step
Scope
670(s +1)(s +1)(s +8)(s +20)
Zero-Pole
1
s +3.2s +3.56s 32Trans fer Fcn
Step
Scope
3、某非线性系统如图所示,试求 时系统的动态特性。 (P52
)
(12)(t t r ?=2s +1s +2s +s 32Trans fer Fcn
Step
Scope
Saturation
5
Gain
页例题2.7)
解:SIMULINK 图形如下:
2s+1s +2s +s 32Transfer Fcn
Step
Scope
Saturation
1
Gain
2s +1s +2s +s 32Trans fer Fcn
Step Scope
MATLAB Function MATLAB Fcn
5Gain
2s +1s +2s +s 32T rans fer Fcn1
2s +1s +2s +s 32T rans
fer Fcn
Step1
Step
Scope
Saturation
5
Gain1
5
Gain
u y
fcn Embedded
MAT LAB Function
其中:
function y = fcn(u) %#eml if u>=1 y=1;
elseif u<=-1 y=-1; else y=u; end
4、考虑如图所示的单位反馈系统,试用双线性变换和根匹配法对其进行仿真(r(t)=1(t),T=0.05):
(1)通过“c2d ”指令将系统各环节进行离散化;
(2)通过“tools —Control Design – Model Discretize ”将连续系统离散化; (3)试绘制闭环频率特性曲线。
解:(1) t=0.05;
n1=[1 3.33];d1=[1 24];[nd1,dd1]=c2dm(n1,d1,t,'tustin') n2=[10];d2=[1 0];[nd2,dd2]=c2dm(n2,d2,t,'tustin') n3=[1];d3=[1 10 16];[nd3,dd3]=c2dm(n3,d3,t,'tustin') 运行结果: nd1 =
0.6770 -0.5730
dd1 =
1.0000 -0.2500
nd2 =
0.2500 0.2500
dd2 =
1 -1
nd3 =
1.0e-003 *
0.4960 0.9921 0.4960
dd3 =
1.0000 -1.5714 0.6032
10s Transfer Fcn4s+3.33s+24Transfer Fcn31s +10s+16
2Transfer Fcn1Step
57.66
(2)
(
s +3.33)(s +24)t u st i n Zer o -P ol e
1s +10s+162t u st i n Tr a nsf e r F cn1
10s t u st i n Tr a nsf e r F cn
St e p
Scope
57.66
Gai n
学院 专业 届别 课程 班级 姓名 学号 联系方式 指导老师2012年5月
计算机仿真技术的发展概述及认识 摘要:随着经济的发展和社会的进步,计算机技术高速发展,使人类社会进入了信息时代,计算机作为后期新秀渗入到人们生活中的每一个领域,给人们的生活带来了前所未有的变化。作为新兴的技术,计算机技术在人类研究的各个领域起到了只管至关重要的作用,帮助人类解决了许多技术难题。在科研领域,计算机技术与仿真技术相结合,形成了计算机仿真技术,作为人们科学研究的一种新型方法,被人们应用到各个领域,用来解决人们用纯数学方法或者现实实验无法解决的问题,对科研领域技术成果的形成有着积极地促进作用。 本文在计算机仿真技术的理论思想基础上,分析了计算机仿真技术产生的基本原因,也就是人们用计算机模拟解决问题的优点所在,讨论了模拟、仿真、实验、计算机仿真之间的联系和区别,介绍了计算机仿真技术的发展历程,并查阅相关资料介绍了计算机仿真技术在不同领域的应用,分析并预测了计算机仿真的未来发展趋势。经过查阅大量数据资料并加以分析对比,这对于初步认识计算机仿真技术具有重要意义。 关键词:计算机仿真;模拟;仿真技术;发展 Discussionand understanding of the development of computer simulation technology Abstract:In the field of scientific research, computer technology and simulation technology is the combination of computer simulation technology as a new method of scientific research applied to various fields, used to solve the problems of pure mathematical methods or practical experiments can not be solved, has a positive role in promoting the formation of scientific research and technological achievements. In the theory of computer simulation technology based on the idea of computer simulation technology to produce the basic reason people use computer simulation to solve the problem of the advantages of where to discuss the links and
中南大学 计算机仿真与建模 实验报告 题目:理发店的服务过程仿真 姓名:XXXX 班级:计科XXXX班 学号:0909XXXX 日期:2013XXXX
理发店的服务过程仿真 1 实验案例 (2) 1.1 案例:理发店系统研究 (2) 1.1.1 问题分析 (3) 1.1.2 模型假设 (3) 1.1.3 变量说明 (3) 1.1.4 模型建立 (3) 1.1.5 系统模拟 (4) 1.1.6 计算机模拟算法设计 (5) 1.1.7 计算机模拟程序 (6) 1实验案例 1.1 案例:理发店模拟 一个理发店有两位服务员A和B顾客随机地到达该理发店,每分钟有一个顾客到达和没有顾客到达的概率均是1/2 , 其中60%的顾客理发仅用5分钟,另外40%的顾客用8分钟. 试对前10分钟的情况进行仿真。 (“排队论”,“系统模拟”,“离散系统模拟”,“事件调度法”)
1.1.1 问题分析 理发店系统包含诸多随机因素,为了对其进行评判就是要研究其运行效率, 从理发店自身利益来说,要看服务员工作负荷是否合理,是否需要增加员工等考 虑。从顾客角度讲,还要看顾客的等待时间,顾客的等待队长,如等待时间过长 或者等待的人过多,则顾客会离开。理发店系统是一个典型的排队系统,可以用 排队论有关知识来研究。 1.1.2 模型假设 1. 60%的顾客只需剪发,40%的顾客既要剪发,又要洗发; 2. 每个服务员剪发需要的时间均为5分钟,既剪发又洗发则花8分钟; 3. 顾客的到达间隔时间服从指数分布; 4. 服务中服务员不休息。 1.1.3 变量说明 u :剪发时间(单位:分钟),u=5m ; v: 既剪发又理发花的时间(单位:分钟),v=8m ; T : 顾客到达的间隔时间,是随机变量,服从参数为λ的指数分布,(单位: 分钟) T 0:顾客到达的平均间隔时间(单位:秒),T 0=λ 1; 1.1.4 模型建立 由于该系统包含诸多随机因素,很难给出解析的结果,因此可以借助计算机 模拟对该系统进行模拟。 考虑一般理发店的工作模式,一般是上午9:00开始营业,晚上10:00左 右结束,且一般是连续工作的,因此一般营业时间为13小时左右。 这里以每天运行12小时为例,进行模拟。 这里假定顾客到达的平均间隔时间T 0服从均值3分钟的指数分布, 则有 3小时到达人数约为603 603=?人, 6小时到达人数约为1203 606=?人, 10小时到达人数约为2003 6010=?人, 这里模拟顾客到达数为60人的情况。 (如何选择模拟的总人数或模拟总时间)
控制系统计算机辅助设计 综合实验指导 实验名称:连续与离散系统校正实验,系统可控性与可观性实验,系统的simulink仿真实验 陈茜编 实验人:苏建聪 学号:200830810122 班级:08电气工程及其自动化1班 信息工程系
实验任务书 1. 有一个单位负反馈控制系统,如果控制对象的传递函数为 设计要求: ① 相角裕度≥45°; ② 当系统的输入信号是单位斜坡信号时,稳态误差ess ≤0.04。 ③ 要求绘制出校正后系统和未校正系统的Bode 图及其闭环系统的单位阶跃响应曲线,并进行对比。 2. 有一个单位负反馈控制系统,如果控制对象的传递函数为: 试设计一个串联滞后校正装置。 设计要求: ①相角裕度≥45°; ② 当系统的输入信号是单位斜坡信号时,稳态误差ess ≤0.04。 ③ 要求绘制出校正后系统和未校正系统的Bode 图及其闭环系统的单位阶跃响应曲线,并进行对比。 3. 有一个单位负反馈控制系统,如果控制对象的传递函数为 ()() 4+= s s k s G p 试设计一个串联超前滞后校正装置,设计要求: ①相角裕度≥45°; ② 当系统的输入信号是单位斜坡信号时,稳态误差ess ≤0.04。 ③ 要求绘制出校正后系统和未校正系统的Bode 图及其闭环系统的单位阶跃响应曲线,并进行对比。 4. 系统结构图如图所示,其中,采样周期Ts=0.01s ,被控对象()() 110+= s s s G ,()s G h 为 零阶保持器。用W 变换法设计一超前校正装置D(z),使系统相位裕度γ≥50°,校验设计后系统的性能指标。 5. 系统结构图如图所示,其中,采样周期Ts=0.01s ,被控对象1) s(0.2s k )(+= s G ο, () s G h 为零阶保持器。用对数频率法设计D(z),使系统开环增益k ≥30(1/s),截
计算机仿真实验报告 专业:电气工程及其自动化班级:09电牵一班学号:22 姓名:饶坚指导老师:叶满园实验日期:2012年4月30日 一、实验名称 三相桥式SPWM逆变电路仿真 二、目的及要求 1.了解并掌握三相逆变电路的工作原理; 2.进一步熟悉MA TLAB中对Simulink的使用及构建模块; 3.掌握SPWM原理及构建调制电路模块; 4.复习在Figure中显示图形的程序编写和对图形的修改。 三、实验原理与步骤、电路图 1、实验原理图
2、电路原理(采用双极性控制方式) U、V和W三相的PWM控制通常公用一个三角波载波Uc,三相的调制信号Uru、Urv和Urw依次相差120°。 电路工作过程(U相为例):当Uru>Uc时,上桥臂V1导通,下桥臂V4关断,则U相相对于直流电源假想中点N’的输出电压Uun’=Ud/2。当Uru 对电路模型进行封装如下图示: 其中Subsystem1为主电路,Subsystem2为负载,Subsystem3为检测电路,Subsystem4为输入信号,Subsystem5为调制电路,Scope 为示波器,Repeating Sequence为三角载波。 各子系统电路分别如下所示: Subsystem1 Subsystem2 Subsystem3 计算机仿真技术的发展概述及认识 摘要:随着经济的发展和社会的进步,计算机技术高速发展,使人类社会进入了信息时代,计算机作为后期新秀渗入到人们生活中的每一个领域,给人们的生活带来了前所未有的变化。作为新兴的技术,计算机技术在人类研究的各个领域起到了只管至关重要的作用,帮助人类解决了许多技术难题。在科研领域,计算机技术与仿真技术相结合,形成了计算机仿真技术,作为人们科学研究的一种新型方法,被人们应用到各个领域,用来解决人们用纯数学方法或者现实实验无法解决的问题,对科研领域技术成果的形成有着积极地促进作用。 本文在计算机仿真技术的理论思想基础上,分析了计算机仿真技术产生的基本原因,也就是人们用计算机模拟解决问题的优点所在,讨论了模拟、仿真、实验、计算机仿真之间的联系和区别,介绍了计算机仿真技术的发展历程,并查阅相关资料介绍了计算机仿真技术在不同领域的应用,分析并预测了计算机仿真的未来发展趋势。经过查阅大量数据资料并加以分析对比,这对于初步认识计算机仿真技术具有重要意义。 关键词:计算机仿真;模拟;仿真技术;发展 一、引言 计算机仿真技术是以多种学科和理论为基础,以计算机及其相应的软件为工具,通过虚拟试验的方法来分析和解决问题的一门综合性技术。计算机仿真(模拟)早期称为蒙特卡罗方法,是一门利用随机数实验求解随机问题的方法。其原理可追溯到1773年法国自然学家G.L.L.Buffon为估计圆周率值所进行的物理实验。根据仿真过程中所采用计算机类型的不同,计算机仿真大致经历了模拟机仿真、模拟-数字混合机仿真和数字机仿真三个大的阶段。20世纪50年代计算机仿真主要采用模拟机;60年代后串行处理数字机逐渐应用到仿真之中,但难以满足航天、化工等大规模复杂系统对仿真时限的要求;到了70年代模拟-数字混合机曾一度应用于飞行仿真、卫星仿真和核反应堆仿真等众多高技术研究领域;80年代后由于并行处理技术的发展,数字机才最终成为计算机仿真的主流。现在,计算机仿真技术已经在机械制造、航空航天、交通运输、船舶工程、经济管理、工程建设、军事模拟以及医疗卫生等领域得到了广泛的应用。 二、基本概念 模拟:(Simulation)应用模型和计算机开展地理过程数值和非数值分析。不是去求系统方程的解析解,而是从系统某初始状态出发,去计算短暂时间之后接着发生的状态,再以此为初始状态不断的重复,就能展示系统的行为模式。模拟是对真实事物或者过程的虚拟。模拟要表现出选定的物理系统或抽象系统的关键特性。模拟的关键问题包括有效信息的获取、关键特性和表现的选定、近似简化和假设的应用,以及模拟的重现度和有效性。可以认为仿真是一种重现系统外在表现的特殊的模拟。 仿真:(Emulation)利用模型复现实际系统中发生的本质过程,并通过对系统模型的实验来研究存在的或设计中的系统,又称模拟。即使用项目模型将特定于某一具体层次的不确定性转化为它们对目标的影响,该影响是在项目仿真项目 通信对抗原理仿真大作业题目 基本要求:仿真大作业分组完成,每个组3~5人,至少选择4个题目,并且在每一类中至少选择一个题目。利用MATLAB完成计算机仿真,并且撰写仿真实验报告。大作业完成情况将作为评价平时成绩的依据。 第一类:测频方法仿真 1.FFT法数字测频技术仿真。仿真模拟通信信号或者数字通信信号三种以上, 基于FFT法进行载波频率测量。画出信号的时域、频域波形,给出FFT法测量的结果。进一步在0-20dB信噪比条件给出不同信噪比下的测量曲线,分析信噪比与测量误差的关系。 2.互相关法数字测频技术仿真。仿真模拟通信信号或者数字通信信号三种以上, 基于互相关法进行载波频率测量。画出信号的时域、频域波形,给出测量结果。进一步在0-20dB信噪比条件给出不同信噪比下的测量曲线,分析信噪比与测量误差的关系。 3.相位差分法数字测频技术仿真。仿真模拟通信信号或者数字通信信号三种以 上,基于相位差分法法进行载波频率测量。画出信号的时域、频域波形,给出测量结果。进一步在0-20dB信噪比条件给出不同信噪比下的测量曲线,分析信噪比与测量误差的关系。 第二类:测向方法仿真 4.相位干涉仪测向方法仿真。仿真模拟通信信号或者数字通信信号两种以上, 基于相位干涉仪测向方法,对不同方向到达的通信信号进行测向。画出信号的时域、频域波形,给出到达方向测量结果。进一步在0-20dB信噪比条件给出不同信噪比下的测量曲线,分析信噪比、到达角与测量误差的关系。 5.到达时差测向方法仿真。仿真模拟通信信号或者数字通信信号两种以上,基 于到达时差测向方法,对不同方向到达的通信信号进行测向。画出信号的时域、频域波形,观察相关函数,给出测量结果。进一步在0-20dB信噪比条件给出不同信噪比下的测量曲线,分析信噪比、到达角与测量误差的关系。6.多普勒测向方法仿真。仿真模拟通信信号或者数字通信信号两种以上,基于 多普勒测向方法,对不同方向到达的通信信号进行测向。画出信号的时域、频域波形,给出测量结果。进一步在0-20dB信噪比条件给出不同信噪比下的测量曲线,分析信噪比、到达角与测量误差的关系。 7.沃森-瓦特测向方法仿真。仿真模拟通信信号或者数字通信信号两种以上,基 于沃森-瓦特测向方法,对不同方向到达的通信信号进行测向。画出信号的时域、频域波形,给出测量结果。进一步在0-20dB信噪比条件给出不同信噪比下的测量曲线,分析信噪比、到达角与测量误差的关系。 第三类:信号处理技术仿真 8.信号带宽和幅度测量方法仿真。仿真模拟通信信号或者数字通信信号三种以 上,基于FFT法进行信号带宽、信号相对幅度测量。画出信号的时域、频域 得分 评分人 填空题: (20分,每题2 分) 单选题:(10分,每题1分) A.任何虚页都可装入主存中任何实页的位置 B. 一个虚页只装进固定的主存实页位置 《计算机系统结构》期末考试试卷(A ) 得分 注:1、共100分,考试时间120分钟。 2、此试卷适用于计算机科学与技术本科专业。 1、."启动I/O"指令是主要的输入输出指令,是属于( A. 目态指令 B.管态指令 C.目态、管态都能用的指令 D.编译程序只能用的指令 2、 输入输出系统硬件的功能对 (B )是透明的 A.操作系统程序员 B.应用程序员 C.系统结构设计人员 D.机器语言程序设计员 3、 全相联地址映象是指(A ) C. 组之间固定,组内任何虚页可装入任何实页位置 D.组间可任意装入,组内是固定装入 4、( C ) 属于MIMD 系统结构 A.各处理单元同时受一个控制单元的管理 B.各处理单元同时受同个控制单元送来的指令 C.松耦合多处理机和多计算机系统 D. 阵列处理机 5、多处理机上两个程序段之间若有先写后读的数据相关,则( B ) A.可以并行执行 B.不可能并行 C.任何情况均可交换串行 D.必须并行执行 6、 计算机使用的语言是(B ) A.专属软件范畴,与计算机体系结构无关 B.分属于计算机系统各个层次 C.属于用以建立一个用户的应用环境 D. 属于符号化的机器指令 7、 指令执行结果出现异常引起的中断是( C ) A.输入/输出中断 B.机器校验中断 C.程序性中断 D.外部中断 &块冲突概率最高的 Cache 地址映象方式是(A ) A.直接 B .组相联 C .段相联 D .全相联 9、 组相联映象、LRU 替换的Cache 存储器,不影响 Cache 命中率的是(B ) A.增大块的大小 B .增大主存容量 C .增大组的大小 D .增加Cache 中的块数 10、 流水处理机对全局性相关的处理不 包括(C ) A.猜测法 B.提前形成条件码 C.加快短循环程序的执行 D.设置相关专用通路 课程:虚拟现实题目:沸腾的水壶 班级:数媒0902 学号:0305090206 姓名:沈玉婷 日期:2012.12 1、绪论 1.1 虚拟现实动画简介 虚拟现实动画就是用虚拟现实的技术以动画的形式表现出来(这是建立在虚拟现实及动画技术的基础上出现的)。我们以了解什么是虚拟现实及动画的意思后就能全面理解虚拟现实动画的概念。 1.2 关于虚拟现实技术 虚拟现实(Virtual Reality,简称VR;又译作灵境、幻真)是近年来出现的高新技术,也称灵境技术或人工环境。虚拟现实是利用电脑模拟产生一个三维空间的虚拟世界,提供使用者关于视觉、听觉、触觉等感官的模拟,让使用者如同身历其境一般,可以及时、没有限制地观察三度空间内的事物。 VR是一项综合集成技术,涉及计算机图形学、人机交互技术、传感技术、人工智能等领域,它用计算机生成逼真的三维视、听、嗅觉等感觉,使人作为参与者通过适当装置,自然地对虚拟世界进行体验和交互作用。使用者进行位置移动时,电脑可以立即进行复杂的运算,将精确的3D世界影像传回产生临场感。该技术集成了计算机图形(CG)技术、计算机仿真技术、人工智能、传感技术、显示技术、网络并行处理等技术的最新发展成果,是一种由计算机技术辅助生成的高技术模拟系统。概括地说,虚拟现实是人们通过计算机对复杂数据进行可视化操作与交互的一种全新方式,与传统的人机界面以及流行的视窗操作相比,虚拟现实在技术思想上有了质的飞跃。 2、需求分析 随着CAD技术的发展,人们就开始研究立体声与三维立体显示相结合的计算机系统。目的在于建立一种新的用户界面,使用户可以置身于计算机所表示的三维空间资料库环境中,并可以通过眼、手、耳或特殊的空间三维装置在这个环境中"环游",创造出一种"亲临其境"的感觉。 虚拟现实是人们通过计算机对复杂数据进行可视化、操作以及实时交互的环境。与传统的计算机人――机界面(如键盘、鼠标器、图形用户界面以及流行的Windows等)相比,虚拟现实无论在技术上还是思想上都有质的飞跃。传统的人――机界面将用户和计算机视为两个独立的实体,而将界面视为信息交换的媒介,由用户把要求或指令输入计算机,计算机对信息或受控对象作出动作反馈。虚拟现实则将用户和计算机视为一个整体,通过各种直观的工具将信息进行可视化,形成一个逼真的环境,用户直接置身于这种三维信息空间中自由地使用各种信息,并由此控制计算机。目前,虚拟现实技术已经遍布我们生活中的每一个行业,城市规划中的应用、旅游景观的应用、医学中应用、娱艺教中的应用、军事与航天中的应用、室内设计中的应用、房产开发中的应用、工业仿真中的应用、应急推演中的应用。由此可知,虚拟 计算机系统结构期末考试试题及其答案 《计算机系统结构》期末考试试卷A 卷第 2 页 共 24 页 计算机科学系《计算机系统结构》期末考试试卷(A 卷) 2、此试卷适用于计算机科学与技术本科专业。 一 单选题:(10分,每题1分) 1、 ."启动I/O"指令是主要的输入输出指 令,是属于( B ) A.目态指令 B.管态指令 C.目态、管态都能用的指令 D.编译程序只能用的指令 2、 输入输出系统硬件的功能对(B )是透 明的 A.操作系统程序员 B.应用程序员 C.系统结构设计人员 D.机器语言程序设计员 3、 全相联地址映象是指(A ) A.任何虚页都可装入主存中任何实页的位置 B.一个虚页只装进固定的主存实页位置 C.组之间固定,组内任何虚页可装入任何实页位 置 D.组间可任意装入,组内是固定装入 4、( C ) 属于MIMD系统结构 A.各处理单元同时受一个控制单元的管理 B.各处理单元同时受同个控制单元送来的指令 C.松耦合多处理机和多计算机系统 D.阵列处理机 5、多处理机上两个程序段之间若有先写 后读的数据相关,则(B ) A.可以并行执行 B.不可能并行 C.任何情况均可交换串行 D.必须并行执行 6、计算机使用的语言是(B) A.专属软件范畴,与计算机体系结构无关 B.分属于计算机系统各个层次 C.属于用以建立一个用户的应用环境 D.属于符号化的机器指令 7、指令执行结果出现异常引起的中断是 (C ) A.输入/输出中断 B.机器校验中断 C.程序性中断 D.外部中断 《计算机系统结构》期末考试试卷A卷第 3 页共 24 页 五、(10分)已知系统的传递函数为6 168682)(232+++++=s s s s s s G 。 语言建立系统传递函数模型,并求: ⑴ 该系统的单位阶跃响应;(2分) ⑵ 输入函数为u(t)时的响应;(3分) (u(t)正弦信号,周期2秒,仿真时间8秒,采样周期0.1); (3) 输入函数为u(t)时的响应;(3分) (u(t)方波输入信号,周期10秒,仿真时间20秒,采样周期0.05) (4) 绘出系统的波德图(Bode )。(2分) 解答: num=[2 8 6]; den=[1 8 16 6]; sys=tf(num,den); t=0:0.1:8; y1=step(sys,t); u=sin(t*pi); y2=lsim(sys,u,t); subplot(2,2,1);plot(t,y1); grid; title('阶跃响应曲线'); xlabel('响应时间'); ylabel('响应值'); hold on; subplot(2,2,2);plot(t,y2); grid on ; title('对sin(t)的响应曲线'); xlabel('响应时间'); ylabel('响应值'); t=0:0.05:20 u=square(pi/5*t) y3=lsim(sys,u,t); subplot(2,2,3);plot(t,y3) grid on ; title('对方波信号的响应曲线'); xlabel('响应时间'); ylabel('响应值'); subplot(2,2,4);bode(sys); grid ;title('bode 图'); 运行结果: 六、(10分)设二阶动力学系统的传递函数如下,假设将无阻尼固有频 率固定为ωn =1 rad/s ,将阻尼比的值分别设置成ζ=0,0.1,0.2,0.3,…, MATLAB 语言编程,分析在这些阻尼比ζ的取值下该系统的阶跃响应。 2222)(n n n s s s G ω?ωω++= 解答:wn=1; kesi=[0:0.1:1,2,3,4,5]; figure('color',[1 1 1]); hold on for i=kesi num=wn.^2 den=[1,2*i*wn,wn.^2]; step(num,den); 第0章绪论 0-1 什么是仿真?它所遵循的基本原则是什么? 答: 仿真是建立在控制理论、相似理论、信息处理技术和计算机技术等理论基础之上的,以计算机和其他专用物理效应设备为工具,利用系统模型对真实或假想的系统进行试验,并借助专家经验知识、统计数据和信息资料对试验结果进行分析和研究,进而做出决策的一门综合性的试验性科学。 它所遵循的基本原则是相似原理。 0-2 仿真的分类有几种?为什么? 答: 依据相似原理来分:物理仿真、数学仿真和混合仿真。 物理仿真:就是应用几何相似原理,制作一个与实际系统相似但几何尺寸较小或较大的物理模型(例如飞机模型放在气流场相似的风洞中)进行实验研究。 数学仿真:就是应用数学相似原理,构成数学模型在计算机上进行研究。它由软硬件仿真环境、动画、图形显示、输出打印设备等组成。 混合仿真又称数学物理仿真,它是为了提高仿真的可信度或者针对一些难以建模的实体,在系统研究中往往把数学仿真、物理仿真和实体结合起来组成一个复杂的仿真系统,这种在仿真环节中有部分实物介入的混合仿真也称为半实物仿真或者半物理仿真。 0-3 比较物理仿真和数学仿真的优缺点。 答: 在仿真研究中,数学仿真只要有一台数学仿真设备(如计算机等),就可以对不同的控制系统进行仿真实验和研究,而且,进行一次仿真实验研究的准备工作也比较简单,主要是受控系统的建模、控制方式的确立和计算机编程。数学仿真实验所需的时间比物理仿真大大缩短,实验数据的处理也比物理仿真简单的多。 与数学仿真相比,物理仿真总是有实物介入,效果直观逼真,精度高,可信度高,具有实时性与在线性的特点;但其需要进行大量的设备制造、安装、接线及调试工作,结构复杂,造价较高,耗时过长,灵活性差,改变参数困难,模型难以重用,通用性不强。 0-4 简述计算机仿真的过程。 答: 第一步:根据仿真目的确定仿真方案 根据仿真目的确定相应的仿真结构和方法,规定仿真的边界条件与约束条件。 第二步:建立系统的数学模型 对于简单的系统,可以通过某些基本定律来建立数学模型。而对于复杂的系统,则必须利用实验方法通过系统辩识技术来建立数学模型。数学模型是系统仿真的依据,所以,数学模型的准确性是十分重要。 实验一 熟悉MATLAB 工作环境 16电气5班 周树楠 20160500529 一、实验目的 1.熟悉启动和退出MATLAB 软件的方法。 2.熟悉MATLAB 软件的运行环境。 3.熟悉MATLAB 的基本操作。 二、实验设备及条件 计算机一台(带有MATLAB6.0以上的软件境)。 三、实验内容 1.练习下面指令: cd,clear,dir,path,help,who,whos,save,load 。 2.建立自己的工作目录MYBIN 和MYDATA ,并将它们分别加到搜索路径的前面或者后面。 3.求23)]47(*212[÷-+的算术运算结果。 4.M 文件的建立,建立M 文件,求出下列表达式的值: ?? ????-+=++=+= 545.0212),1ln(21 185sin 2222 1i x x x z e z o 其中 5.利用MATLAB的帮助功能分别查询inv、plot、max、round函数的功能和用法。 四、运行环境介绍及注意事项 1.运行环境介绍 打开Matlab软件运行环境有图1-1所示的界面 图1-1 MATLAB的用户界面 操作界面主要的介绍如下: 指令窗( Command Window ),在该窗可键入各种送给 MATLAB 运作的指令、函数、表达式,并显示除图形外的所以运算结果。 历史指令窗( Command History ),该窗记录已经运行过的指令、函数、表达式;允许用户对它们进行选择复制、重运行,以及产生 M 文件。 工作空间浏览器( Workspace Browser ),该窗口罗列出 MATLAB 工作空间中所有的变量名、大小、字节数;并且在该窗中,可对变量进行观察、编辑、提取和保存。 其它还有当前目录浏览器( Current Directory Browser )、 M 文件编辑 / 调试器(Editor/Debugger )以及帮助导航/ 浏览器(Help Navigator/Browser )等,但通常不随操作界面的出现而启动。 利用 File 菜单可方便对文件或窗口进行管理。其中 File | New 的各子菜单, M-file ( M 文件)、 Figure (图形窗口)、或 Model ( Simulink 编辑界面)分别可创建对应文件或模块。 Edit 菜单允许用户和 Windows 的剪切板交互信息。 2.在指令窗操作时应特别注意以下几点 1)所有输入的指令、公式或数值必须按下回车键以后才能执行。例如: >>(10*19+2/4-34)/2*3 (回车) ans= 234.7500 2)所有的指令、变量名称都要区分字母的大小写。 3)%作为MATLAB注释的开始标志,以后的文字不影响计算的过程。 4)应该指定输出变量名称,否则MATLAB会将运算结果直接存入默认的输出变量名ans。 5)MATLAB可以将计算结果以不同的精确度的数字格式显示,可以直接在指令视窗键入不同的数字显示格式指令。例如:>>format short (这是默认的) 6)MATLAB利用了↑↓二个游标键可以将所输过的指令叫回来重复使用。按下↑则前一次输入的指令重新出现,之后再按Enter键,即再执行前一次的指令。 Mersenne Twister随机数发生器及随机性测试 一、实验目的 用MATLAB实现Mersenne Twister随机数发生器,并对其随机性进行测试。二、实验原理 伪随机数的产生,首先是选取种子,然后是在此种子基础上根据具体的生成算法计算得到一个伪随机数,然后利用此伪随机数再根据生成算法递归计算出下二个伪随机数,直到将所有不重复出现的伪随机数全部计算出来。这个伪随机数序列就是以后要用到的伪随机数序列。上面的计算过程可以一次性计算完毕,也可以使用一次递归计算一次,每次生成的伪随机数就是这个伪随机数序列中的一个,不过不管怎么样,只要确定了种子,确定了生成算法,这个序列就是确定的了。所谓种子,就是一个对伪随机数计算的初始值。 Mersenne Twister算法是一种随机数产生方法,它是移位寄存器法的变种。该算法的原理:Mersenne Twister算法是利用线性反馈移位寄存器(LFSR)产生随机数的,LFSR的反馈函数是寄存器中某些位的简单异或,这些位也称之为抽头序列。一个n位的LFSR能够在重复之前产生2^n-1位长的伪随机序列。只有具有一定抽头序列的LFSR才能通过所有2^n-1个内部状态,产生2^n - 1位长的伪随机序列,这个输出的序列就称之为m序列。为了使LFSR成为最大周期的LFSR,由抽头序列加上常数1形成的多项式必须是本原多项式。一个n阶本原多项式是不可约多项式,它能整除x^(2*n-1)+1而不能整除x^d+1,其中d能整除2^n-1。例如(32,7,5,3,2,1,0)是指本原多项式x^32+x^7+x^5+x^3+x^2+x+1,把它转化为最大周期LFSR就是在LFSR小邓第32,7,5,2,1位抽头。利用上述两种方法产生周期为m的伪随机序列后,只需要将产生的伪随机序列除以序列的周期,就可以得到(0,1)上均匀分布的伪随机序列了。 伪代码如下: // 建立624位随机序列数组 int[0..623] MT int index = 0 //初始化随机序列数组 function initializeGenerator(int seed) { MT[0] := seed for i from 1 to 623 { MT[i] := last 32 bits of(1812433253 * (MT[i-1] xor(right shift by 30 bits(MT[i-1]))) + i) // 0x6c078965 } } 实验七 基于Simulink 的简单电力系统仿真实验 一. 实验目的 1) 熟悉Simulink 的工作环境及SimPowerSystems 功能模块库; 2) 掌握Simulink 的的powergui 模块的应用; 3) 掌握发电机的工作原理及稳态电力系统的计算方法; 4)掌握开关电源的工作原理及其工作特点; 5)掌握PID 控制对系统输出特性的影响。 二.实验内容与要求 单机无穷大电力系统如图7-1所示。平衡节点电压044030 V V =∠?。负荷功率10L P kW =。线路参数:电阻1l R =Ω;电感0.01l L H =。发电机额定参数:额定功率100n P kW =;额定电压440 3 n V V =;额定励磁电流70 fn i A =;额定频率50n f Hz =。发电机定子侧参数:0.26s R =Ω,1 1.14 L mH =,13.7 md L mH =,11 mq L mH =。发电机转子侧参数:0.13f R =Ω,1 2.1 fd L mH =。发电机阻尼绕组参数:0.0224kd R =Ω,1 1.4 kd L mH =,10.02kq R =Ω,11 1 kq L mH =。发电机转动惯量和极对数分别为224.9 J kgm =和2p =。发电机输出功率050 e P kW =时,系统运行达到稳态状态。在发电机输出电磁功率分别为170 e P kW =和2100 e P kW =时,分析发电机、平衡节点电源和负载的电流、电磁功率变化曲线,以及发电机转速和功率角的变化曲线。 G 发电机节点 V 负 荷 l R l L L P 图 7.1 单机无穷大系统结构图 输电线路 三.实验步骤 1. 建立系统仿真模型 同步电机模块有2个输入端子、1个输出端子和3个电气连接端子。模块的第1个输入端子(Pm)为电机的机械功率。当机械功率为正时,表示同步电机运行方式为发电机模式;当机械功率为负时,表示同步电机运行方式为电动机模式。在发电机模式下,输入可以是一个正的常数,也可以是一个函数或者是原动机模块的输出;在电动机模式下,输入通常是一个负的常数或者是函数。模块的第2个输入端子(Vf)是励磁电压,在发电机模式下可以由励磁模块提供,在电动机模式下为一个常数。 在Simulink仿真环境中打开Simulink库,找出相应的单元部件模型,构造仿真模型,三相电压源幅值为4403,频率为50Hz。按图连接好线路,设置参数,建立其仿真模型,仿真时间为5s,仿真方法为ode23tb,并对各个单元部件模型的参数进行修改,如图所示。 、数值计算,编程完成以下各题(共20分,每小题5 分) 1、脉冲宽度为d,周期为T的矩形脉冲的傅里叶级数如下式描述: d[i.^= sin(^d/T)cos(^:n.) T n」n rd /T 当n =150,d..「T =1;4,- 1/2 :::.::: 1/2,绘制出函数f(.)的图形。 解: syms n t; f=((si n(n *pi/4))/( n*pi/4))*cos(2*pi* n*t); s=symsum(f, n,1,150); y=(1+2*s)/4; x=-0.5:0.01:0.5; Y=subs(y,'t',x); plot(x,Y) 2 0 05x2 5 ■ 5 2、画出函数f (x)二(sin 5x) e .- 5x cos1.5x 1.5x 5.5 x 在区间[3, 5]的图形,求出该函数在区间[3, 5]中的最小值点X min和函数的最小值f min . 解:程序如下 x=3:0.05:5; y=(si n(5*x).A2).*exp(0.05*x.A2)-5*(x.A5).*cos(1.5*x)+1.5*abs(x+5.5)+x.A2.5; mix_where=fi nd(y==mi n(y)); xmin=x(mix_where); hold on; plot(x,y); plot(xmi n,min (y),'go','li newidth',5); str=strcat('(' ,nu m2str(xmi n),',' ,nu m2str(mi n(y)),')'); text(xmi n,min (y),str); Ylabel('f(x)') 经过运行后得到的图像截图如下: 运行后的最小值点X min =4.6 , f m in = -8337.8625 3、画出函数f (x) = cos2x「e^'x — 2.5 X在口,3]区间的图形, 解该非线 并用编程求性方程 f (x) = 0的一个根,设初始点为X o = 2 . 解: x=1:0.02:3; x0=2; y=@(x)(cos(x).A2).*exp(-0.3*x)-2.5*abs(x); fplot(y,[1,3]); Xlabel('x') Ylabel('f(x)') X仁fzero('(cos(x).A2).*exp(-0.3*x)-2.5*abs(x)',x0) 运行后求得该方程的一个根为z=0.3256 。 4、已知非线性方程组如下,编程求方程组的解,设初始点为[1 0.5 -1]. 《控制系统数字仿真》课程 大作业 姓名: 学号: 班级: 日期: 同组人员: 目录 一、引言 (2) 二、设计方法 (2) 1、系统数学模型 (2) 2、系统性能指标 (4) 2.1 绘制系统阶跃响应曲线、根轨迹图、频率特性 (4) 2.2 稳定性分析 (6) 2.3 性能指标分析 (6) 3、控制器设计 (6) 三、深入探讨 (9) 1、比例-微分控制器(PD) (9) 2、比例-积分控制(PI) (12) 3、比例-微分-积分控制器(PID) (14) 四、设计总结 (17) 五、心得体会 (18) 六、参考文献 (18) 一、引言 MATLAB语言是当今国际控制界最为流行的控制系统计算机辅助设计语言,它的出现为控制系统的计算机辅助分析和设计带来了全新的手段。其中图形交互式的模型输入计算机仿真环境SIMULINK,为MATLAB应用的进一步推广起到了积极的推动作用。现在,MATLAB语言已经风靡全世界,成为控制系统CAD领域最普及、也是最受欢迎的软件环境。 随着计算机技术的发展和应用,自动控制理论和技术在宇航、机器人控制、导弹制导及核动力等高新技术领域中的应用也愈来愈深入广泛。不仅如此,自动控制技术的应用范围现在已发展到生物、医学、环境、经济管理和其它许多社会领域中,成为现代社会生活中不可或缺的一部分。随着时代进步和人们生活水平的提高,在人类探知未来,认识和改造自然,建设高度文明和发达社会的活动中,控制理论和技术必将进一步发挥更加重要的作用。作为一个自动化专业的学生,了解和掌握自动控制的有关知识是十分必要的。 利用MATLAB软件及其SIMULINK仿真工具来实现对自动控制系统建模、分析与设计、仿真,能够直观、快速地分析系统的动态性能和稳态性能,并且能够灵活的改变系统的结构和参数,通过快速、直观的仿真达到系统的优化设计,以满足特定的设计指标。 二、设计方法 1、系统数学模型 美国卡耐尔基-梅隆大学机器人研究所开发研制了一套用于星际探索的系统,其目标机器人是一个六足步行机器人,如图(a)所示。该机器人单足控制系统结构图如图(b)所示。 要求: (1)建立系统数学模型; (2)绘制系统阶跃响应曲线、根轨迹图、频率特性; (3)分析系统的稳定性,及性能指标; (4)设计控制器Gc(s),使系统指标满足:ts<10s,ess=0,,超调量小于5%。 精品文档 一、数值计算,编程完成以下各题(共20 分,每小题 5 分) 1、脉冲宽度为 d ,周期为 T 的矩形脉冲的傅里叶级数如下式描述: f ( )d 2 sin( n d / T ) cos( 2 n ) [1 n d / T T n 1 当 n 150, d T 1 4, 1 / 2 1 / 2 ,绘制出函数 f ( ) 的图形。 解: syms n t; f=((sin(n*pi/4))/(n*pi/4))*cos(2*pi*n*t); s=symsum(f,n,1,150); y=(1+2*s)/4; x=-0.5:0.01:0.5; Y=subs(y,'t',x); plot(x,Y) 2、画出函数 f ( x) (sin 5x) 2 e0.05x25x5 cos1.5x 1.5 x 5.5x5在区间[3, 5] 的图形,求出该函数在区间[3, 5]中的最小值点x m in和函数的最小值 f m in. 解:程序如下 x=3:0.05:5; y=(sin(5*x).^2).*exp(0.05*x.^2)-5*(x.^5).*cos(1.5*x)+1.5*abs(x+5.5)+x.^2.5; mix_where=find(y==min(y)); xmin=x(mix_where); hold on; plot(x,y); plot(xmin,min(y),'go','linewidth',5); str=strcat('(',num2str(xmin),',',num2str(min(y)),')'); text(xmin,min(y),str); Ylabel('f(x)') 经过运行后得到的图像截图如下: 运行后的最小值点x m in =4.6, f m in= -8337.8625 3、画出函数 f ( x)cos 2 x e 0 .3 x 2.5 x 在[1,3]区间的图形,并用编程求解该非线性方程 f ( x )0 的一个根,设初始点为x02. 解: x=1:0.02:3; x0=2; y=@(x)(cos(x).^2).*exp(-0.3*x)-2.5*abs(x); fplot(y,[1,3]); Xlabel('x') Ylabel('f(x)') X1=fzero('(cos(x).^2).*exp(-0.3*x)-2.5*abs(x)',x0) 运行后求得该方程的一个根为z=0.3256 。 4、已知非线性方程组如下,编程求方程组的解,设初始点为[1 0.5 -1]. x 2x 72 x 5 z 23 yz30 《计算机仿真》上机实验报告 姓名: 学号: 2012104021 专业:测控 班级: 12级 实验一常微分方程的求解及系统数学模型的转换一.实验目的 通过实验熟悉计算机仿真中常用到的Matlab指令的使用方法,掌握常微分方程求解指令和模型表示及转换指令,为进一步从事有关仿真设计和研究工作打下基础。 二. 实验设备 个人计算机,Matlab软件。 三. 实验准备 预习本实验有关内容(如教材第2、3、5章中的相应指令说明和例题),编写本次仿真练习题的相应程序。 四. 实验内容 1. Matlab中常微分方程求解指令的使用 题目一:请用MATLAB的ODE45算法分别求解下列二个方程。要求:1.编写出Matlab 仿真程序;2.画出方程解的图形并对图形进行简要分析;3.分析下列二个方程的关系。 1.2. 1.function fun=funl(t,x) fun=-x^2; [t,x]=ode45('fun1',[0,20],[1]); figure(1);plot(t,x); grid 2.function fun=fun2(t,x) fun=x^2; [t,x]=ode45('fun2',[0,20],[-1]); figure(2);plot(t,x); grid 题目二:下面方程组用在人口动力学中,可以表达为单一化的捕食者-被捕食者模式(例如,狐狸和兔子)。其中1x 表示被捕食者, 2x 表示捕食者。如果被捕食者有无限的食物,并且不会出现捕食者。于是有1'1x x ,则这个式子是以指数形式增长的。大量的被捕食者将会使捕食者的数量增长;同样,越来越少的捕食者会使被捕食者的数量增长。而且,人口数量也会增长。请分别调用ODE45、ODE23算法求解下面方程组。要求编写出Matlab 仿真程序、画出方程组解的图形并对图形进行分析和比较。 1.ODE45计算机仿真技术的发展概述及认识
通信对抗原理大作业题目
系统结构期末考试试题及答案
江南大学数媒0902基于虚拟现实技术大作业报告
计算机系统结构期末考试试题及其答案
武汉理工大学-计算机仿真实验作业答案
计算机仿真技术与CAD习题答案
计算机仿真实训实验报告实验1-4
计算机仿真期末大作业Mersenne Twister随机数发生器及随机性测试
计算机仿真实验-基于Simulink的简单电力系统仿真参考资料
《计算机仿真技术》试题(含完整答案)
控制系统数字仿真大作业.
《计算机仿真技术》试题(含完整答案).docx
计算机仿真实验报告实验
相关主题
文本预览