年级专业:14电气工程
学号:S14085207021 姓名:于尚民
授课教师:王晓寰
日期:2015.7.3
并网逆变器通常采用L滤波器,虽然结构和控制简单,但是随着功率级别的增加会地带来体积重量增大等问题。LCL滤波器使用用于功率较大的场合。高等电力电子课程所讲述的正是这种并网逆变器的控制策略。
电力电子变化的主要任务是通过控制使电力电子系统完成既定的点萌变换,并输出期望的电流、电压和功率。那么,对于电力电子系统的控制将显得十分的重要。一般采用双闭环控制,而控制所采用的反馈信号又根据不同的要求而不同。
本文是基于有源逆变系统来进行控制系统的设计。采用基于LCL滤波器的并网系统。主要讨论控制系统的结构、调节器设计和参数整定。一主要参数
有功功率:
电容:C=20
逆变器侧电感:
电网侧电感:
开关频率:
电网电压:
电网频率:
直流电源:U=800V
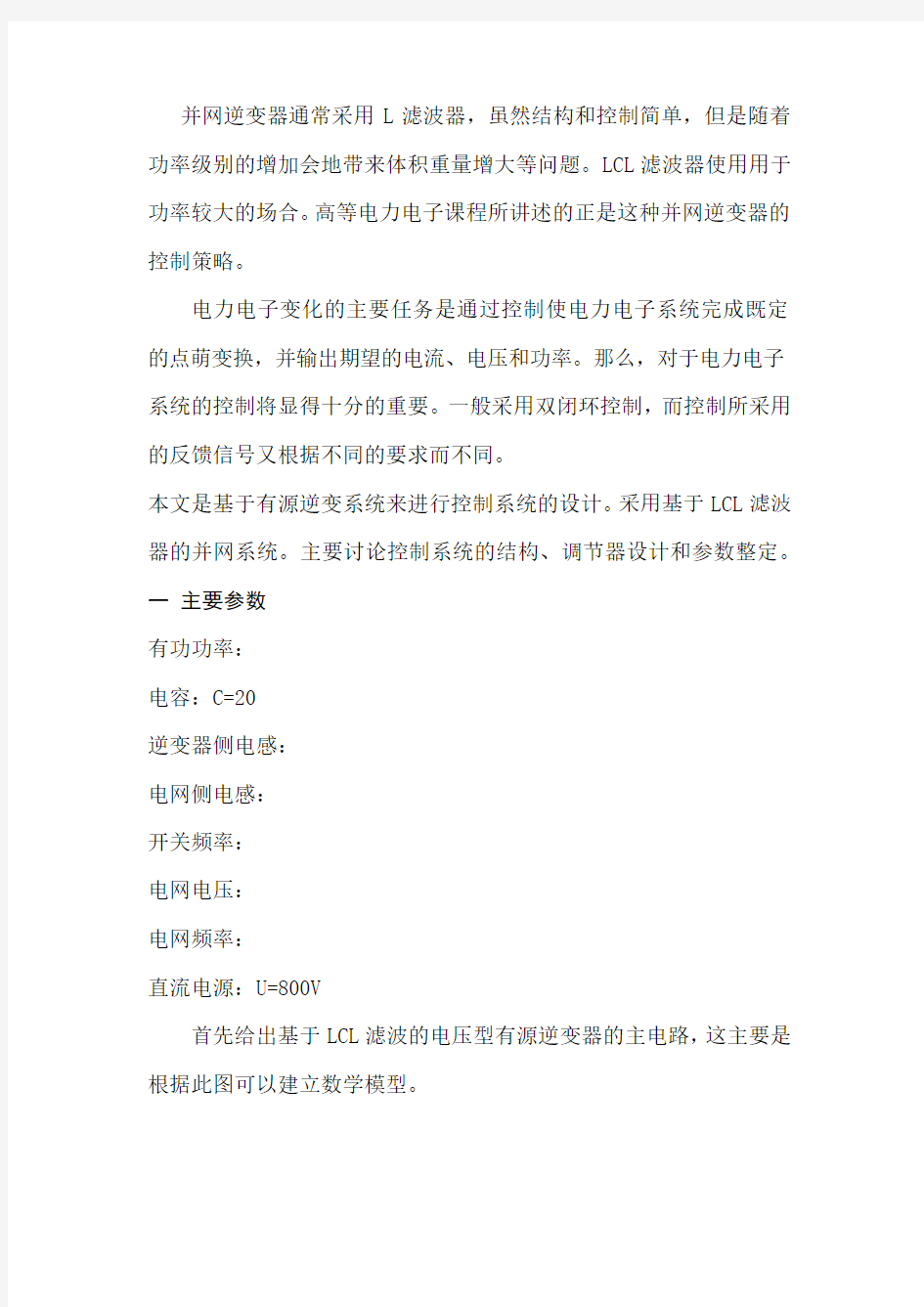
首先给出基于LCL滤波的电压型有源逆变器的主电路,这主要是根据此图可以建立数学模型。
图1 基于LCL滤波的电压型有源逆变器的主电路需要注意的是参数中将电感的等效内阻忽略,直流侧用直流电源代替。
二逆变器控制系统的内环结构
外环采用输出电流反馈。内环则有多种方式,下面主要基于电容电流和网侧电感电压反馈的单位调节器内环进行控制说明。
1基于电容电流反馈的单位调节器
图2 基于电容电流反馈的单位调节器结构框图
对上图进行简化后可得到开环传递函数
因为是单位调节器,即开环增益,如上式。
根据参数和开环传递函数可以画出闭环传递函数极点的根轨迹
图3 基于电容电流 反馈的单位调节器内环根轨迹
无论内环增益K 如何变化,基于电容电流 反馈的单位调节器内环控制始终是稳定的。
2基于网侧电感电压 反馈的单位调节器 与上述同理先画出结构框图
图4 基于网侧电感电压 反馈的单位调节器结构框图 对结构框图简化同样可以得到开环传递函数
画闭环传递函数极点根轨迹
4
Root Locus
Real Axi s
I m a g i n a r y A x i s
图5 基于网侧电感电压 反馈的单位调节器内环根轨迹 无论内化增益K 如何变化,基于网侧电感电压 反馈的单位调节器内环控制均不稳定。
综上所述,并不是任何反馈内环调节器都能使系统稳定,基于前面的分析,下述仿真内环控制将基于电容电流 反馈。 三 PI 参数的整定
课程中介绍两种方法,一是典型系统正定法,这种方法虽然简单直观,但需要考虑多环之间响应速度及频带相互这影响与协调,并且在实际整定时还需满足结构简化近似条件。在这个基础上提出了另一种整定方法,闭环极点配置法。
本文选用闭环极点配置法对PI 参数进行整定,电流外环采用PI 调节器,电容电流内环采用P 调节器。结构框图。
4
Root Locus Real Axi s
I m a g i n a r y A x i s
图6 电流双闭环系统控制框图
如果忽略电网电压的影响,只考虑电容电流与逆变器侧电压的关系以及电容电流与电网电流的关系,将得到如下关系式
通过上式可以将图6的结构框图改进
图7 电流双闭环系统改进的控制框图
因此,电容电流内环可以化简表示为
电流外环框图可以如图8所示
图8 电流外环控制框图
通过化简可以得到电流双闭环的传递函数如下式
其中,
可以看出电流双闭环系统是四阶系统,采用零极点配置法时。特征方程有两个主导共轭极点和两个非主导的共轭极点或者非主导的两个实轴的根。如式所示
主导极点与非主导极点的关系为,当时,
。
将配置极点的与电流双闭环的特征方程比较,可得到如下关系式。
当 时, 为最大值。可以将上式化简为
值得注意的是,公式里的实际是框图系统中的,所以按照这个公式算出来的参数除以才是实际仿真中应该用的参数。经分析,将阻尼比 设置为0.6,计算系统的各个参数:
四仿真
搭建仿真模型如图9所示,以及控制模块如图10所示。
图9 搭建模型
图10 控制模型
仿真所观察的是电网侧的a 相的电压和电流如图11所示。
图11 电网侧a 相电压电流
从图11所示,可以得到电流与电压同相位,无功抑制较好。现在单独观察a 相电流波形如图12所示。
图12 电流波形
电流幅值为64.5
和所给定值一致,但是,在仿真开始阶段电流
ia
有振荡,这是由于调节器参数整定时出现误差,使的电流没有准确跟踪,这是以后改正的方面。
逆变电源广泛运用于各类:电力、通讯、工业设备、卫星通信设备、军用车载、医疗救护车、警车、船舶、太阳能及风能发电领域。 在电路中将直流电转换为交流电的过程称之为逆变,这种转换通常通过逆变电源来实现。这就涉及到在逆变过程中的控制算法问题。 只有掌握了逆变电源的控制算法,才能真正意义上的掌握逆变电源的原理和运行方式,从而方便设计。在本篇文章当中,将对逆变电源的控制算法进行总结,帮助大家进一步掌握逆变电源的相关知识。 逆变电源的算法主要有以下几种。 数字PID控制 PID控制是一种具有几十年应用经验的控制算法,控制算法简单,参数易于整定,设计过程中不过分依赖系统参数,鲁棒性好,可靠性高,是目前应用最广泛、最成熟的一种控制技术。它在模拟控制正弦波逆变电源系统中已经得到了广泛的应用。将其数字化以后,它克服了模拟PID控制器的许多不足和缺点,可以方便调整PID参数,具有很大的灵活性和适应性。与其它控制方法相比,数字PID具有以下优点: PID算法蕴涵了动态控制过程中过去、现在和将来的主要信息,控制过程快速、准确、平稳,具有良好的控制效果。 PID控制在设计过程中不过分依赖系统参数,系统参数的变化对控制效果影响很小,控制的适应性好,具有较强的鲁棒性。 PID算法简单明了,便于单片机或DSP实现。 采用数字PID控制算法的局限性有两个方面。一方面是系统的采样量化误差降低了算法的控制精度;另一方面,采样和计算延时使得被控系统成为一个具有纯时间滞后的系统,造成PID控制器稳定域减少,增加了设计难度。 状态反馈控制 状态反馈控制可以任意配置闭环控制系统的极点,实现了逆变电源控制系统极点的优化配置,有利于改善系统输出的动态品质,具有良好的瞬态响应和较低的谐波畸变率。但在建立逆变器的状态模型时将负载的动态特性考虑在内,因此状态反馈控制只能针对空载和已知的负载进行建模。由于状态反馈控制对系统模型参数的依赖性很强,使得系统的参数在发生变化时易导致稳态误差的出现和以及动态特性的改变。例如对于非线性的整流负载,其控制效果就不是很理想。 重复控制
湖北民族学院 毕业论文(设计)基于闭环控制的三相SVPWM逆变器设计 学生姓名:温伟林学号:0306513 系别:信息工程学院专业:电气工程及其自动化指导教师:曾仑明评阅教师: 论文答辩日期2010.5.29 答辩委员会主席杨庆
独创性声明 本人声明所呈交的学位论文是我个人在导师指导下进行的研究工作及取得的研究成果。尽我所知,除文中已经标明引用的内容外,本论文不包含任何其他个人或集体已经发表或撰写过的研究成果。对本文的研究做出贡献的个人和集体,均已在文中以明确方式标明。本人完全意识到本声明的法律结果由本人承担。 学位论文作者签名: 日期:年月日 学位论文版权使用授权书 本学位论文作者完全了解学校有关保留、使用学位论文的规定,即:学校有权保留并向国家有关部门或机构送交论文的复印件和电子版,允许论文被查阅和借阅。本人授权湖北民族学院可以将本学位论文的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。 保密□ ,在_____年解密后适用本授权书。 本论文属于 不保密□。 (请在以上方框内的“√”) 学位论文作者签名:指导教师签名: 日期:年月日日期:年月日
摘要 本文主要介绍了全数字化基于闭环控制的三相SVPWM逆变器系统的总体设计方案,包括逆变器主电路的设计和逆变器数字控制系统的软硬件设计两大部分。逆变器主电路的设计包括能抑制输入浪涌电流的整流电路设计、具有无损吸收电路且适用于高开关频率的三相逆变器开关电路设计、变压器设计、LC输出滤波器设计四个部分。逆变器控制系统在控制策略上采用的是电压型PWM逆变控制,并用TMS320LF2407A芯片及相应的驱动电路和高速数据采集电路等实现全数字化闭环控制。在进行数字控制系统软件设计时,特别对应用于本系统中的SVPWM控制算法、数字PI算法两种重要的数字信号处理算法作了较为详细的推导和分析,并在算法的基础上给出了控制系统主程序流程图。文中最后部分对适用于高电压大功率的三电平逆变器作了初步的探讨,并给出了三电平逆变器的Matlab模型和仿真结果。 关键词:逆变器,LC输出滤波器,SVPWM,数字PI算法,数字滤波
年级专业:14电气工程 学号:S14085207021 姓名:于尚民 授课教师:王晓寰 日期:2015.7.3
并网逆变器通常采用L滤波器,虽然结构和控制简单,但是随着功率级别的增加会地带来体积重量增大等问题。LCL滤波器使用用于功率较大的场合。高等电力电子课程所讲述的正是这种并网逆变器的控制策略。 电力电子变化的主要任务是通过控制使电力电子系统完成既定的点萌变换,并输出期望的电流、电压和功率。那么,对于电力电子系统的控制将显得十分的重要。一般采用双闭环控制,而控制所采用的反馈信号又根据不同的要求而不同。 本文是基于有源逆变系统来进行控制系统的设计。采用基于LCL滤波器的并网系统。主要讨论控制系统的结构、调节器设计和参数整定。一主要参数 有功功率: 电容:C=20 逆变器侧电感: 电网侧电感: 开关频率: 电网电压: 电网频率: 直流电源:U=800V 首先给出基于LCL滤波的电压型有源逆变器的主电路,这主要是根据此图可以建立数学模型。
图1 基于LCL滤波的电压型有源逆变器的主电路需要注意的是参数中将电感的等效内阻忽略,直流侧用直流电源代替。 二逆变器控制系统的内环结构 外环采用输出电流反馈。内环则有多种方式,下面主要基于电容电流和网侧电感电压反馈的单位调节器内环进行控制说明。 1基于电容电流反馈的单位调节器 图2 基于电容电流反馈的单位调节器结构框图 对上图进行简化后可得到开环传递函数 因为是单位调节器,即开环增益,如上式。 根据参数和开环传递函数可以画出闭环传递函数极点的根轨迹
图3 基于电容电流 反馈的单位调节器内环根轨迹 无论内环增益K 如何变化,基于电容电流 反馈的单位调节器内环控制始终是稳定的。 2基于网侧电感电压 反馈的单位调节器 与上述同理先画出结构框图 图4 基于网侧电感电压 反馈的单位调节器结构框图 对结构框图简化同样可以得到开环传递函数 画闭环传递函数极点根轨迹 4 Root Locus Real Axi s I m a g i n a r y A x i s
https://www.doczj.com/doc/133857823.html,/ 逆变电源广泛运用于各类:电力、通讯、工业设备、卫星通信设备、军用车载、医疗救护车、警车、船舶、太阳能及风能发电领域。 在电路中将直流电转换为交流电的过程称之为逆变,这种转换通常通过逆变电源来实现。这就涉及到在逆变过程中的控制算法问题。 只有掌握了逆变电源的控制算法,才能真正意义上的掌握逆变电源的原理和运行方式,从而方便设计。在本篇文章当中,将对逆变电源的控制算法进行总结,帮助大家进一步掌握逆变电源的相关知识。 逆变电源的算法主要有以下几种。 数字PID控制 PID控制是一种具有几十年应用经验的控制算法,控制算法简单,参数易于整定,设计过程中不过分依赖系统参数,可靠性高,是目前应用最广泛、最成熟的一种控制技术。它在模拟控制正弦波逆变电源系统中已经得到了广泛的应用。将其数字化以后,它克服了模拟PID控制器的许多不足和缺点,可以方便调整PID参数,具有很大的灵活性和适应性。与其它控制方法相比,数字PID具有以下优点:
https://www.doczj.com/doc/133857823.html,/ PID算法蕴涵了动态控制过程中过去、现在和将来的主要信息,控制过程快速、准确、平稳,具有良好的控制效果。 PID控制在设计过程中不过分依赖系统参数,系统参数的变化对控制效果影响很小,控制的适应性好,具有较强的鲁棒性。 PID算法简单明了,便于单片机或DSP实现。 采用数字PID控制算法的局限性有两个方面。一方面是系统的采样量化误差降低了算法的控制精度;另一方面,采样和计算延时使得被控系统成为一个具有纯时间滞后的系统,造成PID控制器稳定域减少,增加了设计难度。 状态反馈控制 状态反馈控制可以任意配置闭环控制系统的极点,实现了逆变电源控制系统极点的优化配置,有利于改善系统输出的动态品质,具有良好的瞬态响应和较低的谐波畸变率。但在建立逆变器的状态模型时将负载的动态特性考虑在内,因此状态反馈控制只能针对空载和已知的负载进行建模。由于状态反馈控制对系统模型参数的依赖性很强,使得系统的参数在发生变化时易导致稳态误差的出现和以及动态特性的改变。例如对于非线性的整流负载,其控制效果就不是很理想。
SPWM波控制逆变器双闭环PID调节器的建模与仿真 随着电力行业的快速发展,逆变器的应用越来越广泛,逆变器的好坏会直 接影响整个系统的逆变性能和带载能力。逆变器的控制目标是提高逆变器输出 电压的稳态和动态性能,稳态性能主要是指输出电压的稳态精度和提高带不平 衡负载的能力;动态性能主要是指输出电压的THD(Total Hannonic Distortion) 和负载突变时的动态响应水平。在这些指标中对输出电压的THD 要求比较高,对于三相逆变器,一般要求阻性负载满载时THD 小于2%,非线性满载(整流性 负载)的THD 小于5%.这些指标与逆变器的控制策略息息相关。文中主要介绍 如何建立电压双环SPWM 逆变器的数学模型,并采用电压有效值外环和电压 瞬时值内环进行控制。针对UPS 单模块10 kVA 单相电压型SPWM 逆变器进行建模仿真。通过仿真,验证了控制思路的正确性以及存该控制策略下的逆变 器所具有的鲁棒性强,动态响应快,THD 低等优点。并以仿真为先导,将其思想移植到具体开发中,达到预期效果。 1 三电平逆变器单相控制模型的建立 带LC 滤波器的单相逆变器的主电路结构如图1 所示。图1 中L 为输出滤波 电感,C 为滤波电容,T1,T2,T3,T4 分别是用来驱动IGBT 的三电平的SPWM 波,U0 为输出负载两端的电压。在建立控制系统的仿真模型时,需要采集负 载两端的电压与实际要求的电乐值做比较,然后通过调节器可以得到所需要调 节的值。在此仿真模型中,驱动波形采用的是三电平的SPWM 波形,具体的 产生原理在这不做详细描述。在Matlah 的Simlink 库中SPWM 波的产生如图 2 所示,这里调制比设为0.8。 图1 三电平逆变器单相主电路 图2 四相SPWM 产生电路
逆变器的两种电流型控制方式 摘要:研究分析了逆变器的两种双环瞬时反馈控制方式——电流型准PWM控制方式和三态DPM电流滞环跟踪控制方式,介绍其工作原理,分析比较其动态和静态性能,并给出具体实现电路及系统仿真结果。 关键词:PWM逆变器功率变换器控制 On Two Types of Current Programmed Control Topologies for Inverters Abstract:This paper presents a comparative study on two types of current programmed instant control modes for inverters, PWM and hysteresis type.Principle, static and dynamic performance are discussed. Realization circuits and simulation results are presented. Keywords:PWM, Inverter, Power converter, Control 中图法分类号:TN86文献标识码:A文章编号:0219 2713(2000)12-642-03 电流型双环控制技术在DC/DC变换器中广泛应用,较单电压环控制可以获得更优良的动态和静态性能[3]。其基本思路是以外环电压调节器的输出作为内环电流给定,检测电感(或开关)电流与之比较,再由比较器的输出控制功率开关,使电感和功率开关的峰值电流直接跟随电压调节器的输出而变化。如此构成的电流、电压双闭环变换器系统瞬态性能好、稳态精度高,特别是具有内在的对功率开关电流的限流能力。逆变器(DC/AC变换器)由于交流输出,其控制较DC/DC变换器复杂得多,早期采用开关点预置的开环控制方式[1],近年来瞬时反馈控制方式被广泛研究,多种各具特色的实现方案被提出,其中三态DPM(离散脉冲调制)电流滞环跟踪控制方式性能优良,易于实现。本文将电流型PWM控制方式成功用于逆变器控制,介绍其工作原理,与电流滞环跟踪控制方式比较动态和静态性能,并给出仿真结果。 1三态DPM电流滞环跟踪控制方式 电流滞环跟踪控制方式有多种实现形式[1,2,4,5],其中三态DPM电流滞环跟踪控制性能较好且易于实现[1]。参照图1,它的基本工作原理是:检测滤波电感电流iL,产生电流反馈信号if。if与给定电流ig相比较,根据两个电流瞬时值之差来决定单相逆变桥的4个开关在下一个开关周期中的导通情况:ig-if>h时(h见图1,为电流滞环宽度,可按参考文献[1]P64式5 2选取)S1、S4导通,UAB=+E,+1状态;ig-if-h时S2、S3导通,UAB="-"E,-1状态;|ig-if|h时S1、S3或S2、S4导通,UAB="0,"0状态。两个D触发器使S1~S4的开关状态变化只能发生在周期性脉冲信号CLK(频率2f)的上升沿,也就是说开关点在时间轴上是离散的,且最高开关频率为f。 仿真和实验表明,iL正半周,逆变器基本上在+1和0状态间切换,而iL负半周,逆变器基本上在-1和0状态间切换,只有U0过零点附近才有少量的+1和-1之间的状态跳变,从而使输出脉动减小。 2电流型准PWM控制方式
逆变器控制策略: 逆变器的控制目标是提高逆变器输出电压的稳态和动态性能。稳态性能主要是指输出电 压的稳态精度和提高带不平衡负载的能力;动态性能主要是指输出电压的THD 和负载突变时的动态响应水平。在这些指标中输出电压THD 要求比较高,对于三相逆变器,一般要求阻性负载满载时THD 小于2%,非线性满载(整流性负载)的THD 小于5%。 1、离网逆变器的控制性能要求主要是使其输出电压具有良好的控制抗扰性。 离网逆变器采用输出电容电流内环和输出电压外环的双闭环控制。 电流调节器可以实现快速加减速和电流限幅作用,同时使系统的抗电源扰动和负载扰动 的能力增强。 电压调节器主要是控制输出电压的稳定。 2、基于LC 滤波器的离网型逆变器 图2 基于LC 滤波的电压型离网逆变器主电路 图3 基于LC 的VSI 输出电压单闭环控制结构 图5 基于电容电流反馈的单位调节器内环控制结构 1VD 3VD 5VD 2VD 6VD 4VD 1 V 3V 5V 4V 6V 2V U V W dc C C R L dc u + -L i o i C i L u C u i u 调节 器 PWM K 1sL R +-i u o i C *u C u L i -1sC -C i ? ? ?C u L u *Cq u cq u PI P PWM K 1sL sC 1iq u C *i C i ????oq i +----
图14 基于同步坐标系的LC-VSI 双环控制结构 PI PI P P Inv.Park Trans Inv.Clarke Trans SPWM Generator Clarke Trans Park Trans Clarke Trans Park Trans *q s U *sd U sd U q s U *sd I *q s I q s I d s I a s I βs I A U βs U a s U B U A I B I 1 1ov T s +11 e T s +1 1oi T s +PI 1Ls 1Cs P 11 oi T s +11 ov T s +*Cq u C *i iq u oq i cq u C i +-+- + -+ -电流内环
SPWM波控制单相逆变器双闭环PID调节器的Simulink 建模与仿真 随着电力行业的快速发展,逆变器的应用越来越广泛,逆变器的好坏 会直接影响整个系统的逆变性能和带载能力。逆变器的控制目标是提高逆变器 输出电压的稳态和动态性能,稳态性能主要是指输出电压的稳态精度和提高带 不平衡负载的能力;动态性能主要是指输出电压的THD(Total Hannonic Distortion)和负载突变时的动态响应水平。在这些指标中对输出电压的THD 要 求比较高,对于三相逆变器,一般要求阻性负载满载时THD 小于2%,非线性满载(整流性负载)的THD 小于5%.这些指标与逆变器的控制策略息息相关。文中主要介绍如何建立电压双环SPWM 逆变器的数学模型,并采用电压有效值外 环和电压瞬时值内环进行控制。针对UPS 单模块10 kVA 单相电压型SPWM 逆变器进行建模仿真。通过仿真,验证了控制思路的正确性以及存该控制策略 下的逆变器所具有的鲁棒性强,动态响应快,THD 低等优点。并以仿真为先导,将其思想移植到具体开发中,达到预期效果。 1 三电平逆变器单相控制模型的建立 带LC 滤波器的单相逆变器的主电路结构如图1 所示。图1 中L 为输出 滤波电感,C 为滤波电容,T1,T2,T3,T4 分别是用来驱动IGBT 的三电平的SPWM 波,U0 为输出负载两端的电压。在建立控制系统的仿真模型时,需要 采集负载两端的电压与实际要求的电乐值做比较,然后通过调节器可以得到所 需要调节的值。在此仿真模型中,驱动波形采用的是三电平的SPWM 波形, 具体的产生原理在这不做详细描述。在Matlah 的Simlink 库中SPWM 波的产 生如图2 所示,这里调制比设为0.8.
太阳能光伏并网控制逆变器工作原理及控制方法摘要:太阳能光伏发电是21世纪最为热门的能源技术领域之一,是解决人类能源危机的重要手段之一,引起人们的广泛关注。本文介绍了太阳能光伏并网控制逆变器的工作过程,分析了太阳能控制器最大功率跟踪原理,太阳能光伏逆变器的并网原理及主要控制方式。 1 引言: 随着工业文明的不断发展,我们对于能源的需求越来越多。传统的化石能源已经不可能满足要求,为了避免面对能源枯竭的困境,寻找优质的替代能源成为人们关注的热点问题。可再生能源如水能、风能、太阳能、潮汐能以及生物质能等能源形式不断映入人们的眼帘。水利发电作为最早应用的可再生能源发电形式得到了广泛使用,但也有人就其的环境问题、安全问题提出过质疑,况且目前的水能开发程度较高,继续开发存在一定的困难。风能的利用近些年来也是热点问题,但风力发电存在稳定性不高、噪音大等缺点,大规模并网对电网会形成一定冲击,如何有效控制风能的开发和利用仍是学术界关注的热点。在剩下的可再生能源形式当中,太阳能发电技术是最有利用价值的能源形式之一。太阳能储量丰富,每秒钟太阳要向地球输送相当于210亿桶石油的能量,相当于全球一天消耗的能量。我国的太阳能资源也十分丰富,除了贵州高原部分地区外,中国大部分地域都是太阳能资源丰富地区,目前的太阳能利用率还不到1/1000。因此在我国大力开发太阳能潜力巨大。 太阳能的利用分为“光热”和“光伏”两种,其中光热式热水器在我
国应用广泛。光伏是将光能转化为电能的发电形式,起源于100多年前的“光生伏打现象”。太阳能的利用目前更多的是指光伏发电技术。光伏发电技术根据负载的不同分为离网型和并网型两种,早期的光伏发电技术受制于太阳能电池组件成本因素,主要以小功率离网型为主,满足边远地区无电网居民用电问题。随着光伏组件成本的下降,光伏发电的成本不断下降,预计到2013年安装成本可降至1.5美元/Wp,电价成本为6美分/(kWh),光伏并网已经成为可能。并网型光伏系统逐步成为主流。本文主要介绍并网型光伏发电系统的系统组成和主要部件的工作原理。 2 并网型光伏系统结构 图1所示为并网型光伏系统的结构。并网型光伏系统包括两大主要部分:其一,太阳能电池组件。将太阳传送到地球上的光能转化成直流电能;其二,太阳能控制逆变器及并网成套设备,负责将电池板输出直流电能转为电网可接受的交流能量。根据功率的不同太阳能逆变器的输出形式可为单相或者三相;可带隔离变压器,也可不配隔离变压器。
电机电子系统计算机控制与仿真 学院:信息工程学院 专业班级:电机与电器 学生姓名:仪轩杏 学号:406107016001 指导老师:张景明
异步电机的双闭环控制 1 引言 矢量控制是目前交流电机的先进控制方式,一般将含有矢量变换的交流电机控制都称之为矢量控制,实际上只有建立在等效直流机模型上,并按转子磁场准确定向的控制,电机才能获得最优的动态性能。 2 基本原理 矢量控制的基本思路是以产生相同的旋转磁动势为准则,将异步电机在静止三相坐标系上的定子交流电流通过坐标变换等效成同步旋转坐标系上的直流电流,分别加以控制,以达到直流电机的控制效果。 异步电机在两相同步旋转坐标系上的数学模型为: 11sm s s e s m e m sm st e s s s e m m st rm m e m r r s r rm rt s m m s r r r rt u R pL L pL L i u L R pL L pL i u pL L R pL L i u L pL L R pL i ωωωωωωωω+--?????? ??????+??????=?????? -+-??? ??? +?????? 00000000 sm s m sm st s m st rm m r rm rt m r rt L L i L L i L L i L L i ψψψψ??????????????????=?????????????????? ()e p m st sm sm rt T n L i i i i =- 当两相同步旋转坐标系按转子磁链定向时,应有,0rm r rt ψψψ==,即得 m e p st r r L T n i L ψ= 1m r sm r L i pT ψ= + m s st r r L i T ωψ= 其中,w e 为同步转速,w r 为转子角频率,w s 为转差角速度,T r 为转子时间常数,n p 为极对数,R s 、R r 为定子、转子电阻,L s 、L r 、L m 为定子、转子电感及定转子之间的互感,p 为微分算子,ψr 为转子磁链。
2006年2月电工技术学报Vol.21 No.2 第21卷第2期TRANSACTIONS OF CHINA ELECTROTECHNICAL SOCIETY Feb. 2006 电压电流双闭环控制逆变器并联系统的 建模和环流特性分析 肖岚1李睿2 1南京航空航天大学自动化学院南京 210016 2浙江大学电气工程学院杭州 310027 摘要传统的基于功率差的逆变器并联控制方法是由电力系统中同步电机并网理论演变而来 通过分别改变各并联模块输出电压的幅值和相位来分别控制各模块输出无功和有功功率平衡 但该并联均流方案应用于电压电流双闭环反馈控制逆变器并联系统时有较大的控制误差本文建 立了考虑环流因素的电压电流双环控制逆变器闭环系统电路模型依据传递函数推导出并联系统 有功环流和无功环流与输出电压幅值和相位的关系建立基于等效输出阻抗和求解微分方程的环流特性分析方法 给出了逆变器输出有功环流和无功环流与输出电压幅值和相位之间的定量关系 提出了相应的并联均流控制方案 仿真结果证实有功和无功环流均受输出电压幅值和相位影响 实验结果证明所提控制方案有较好的均流效果 关键词并联逆变器环流输出阻抗建模 中图分类号TM464 Modeling and Circulating-Current Characteristics Analysis of Voltage and Current Double Closed-Loop Controlled Inverter Paralleling System Xiao Lan1Li Rui2 1Nanjing University of Aeronautics & Astronautics Nanjing 210016 China 2Zhejiang University Hangzhou 310027 China Abstract Traditional power difference based paralleling control technology of inverters is evolved from the grid-connection theory of the synchronous generators in utility system, in which the sharing of the active and reactive power in each module is controlled and balanced by adjusting the phase and amplitude of the output voltage respectively. When used in paralleling inverters which adopt voltage and current double closed-loop control strategy, this method however, results in relatively large control error. This paper establishes the circuit model of the voltage and current double closed-loop controlled inverter with the consideration of the circulating-current. The active and reactive power’s relationship with the amplitude and phase of the output voltage is deduced from the transfer function. The circulating-current characteristic analysis method is established based on equivalent output impedance model and differential equations calculation. The quantitative relationship between the output power and the output voltage is given, and the corresponding paralleling control technology is proposed. The simulation result verifies that both the active and reactive power are affected by the amplitude and the phase of the output voltage. Experimental results verify that the proposed control scheme has good load-sharing effect. Keywords Parallel, inverter, circulating current, output impedance, modeling 国家自然科学基金资助项目 50337030航空科学基金资助项 目 01F52032 收稿日期 2005-02-18改稿日期2005-07-05 万方数据