电子精密机械设计
—凸轮设计
题目:
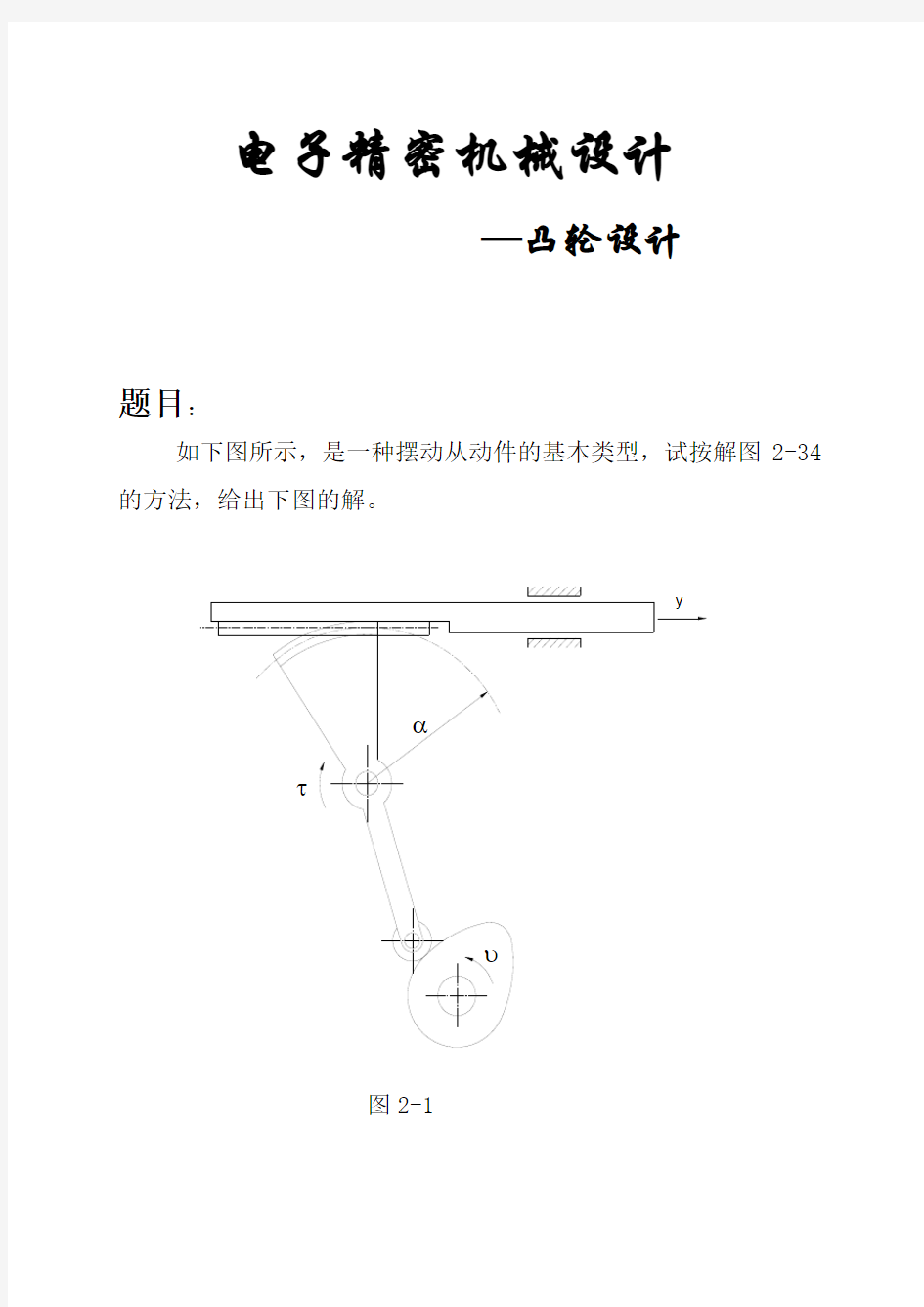
如下图所示,是一种摆动从动件的基本类型,试按解图2-34的方法,给出下图的解。
y
α
τ
υ
图2-1
分析:
由于执行构件与凸轮间是通过中间摆杆相连接,如上图所示,所以必须首先根据执行构件所要求的运动规律,求摆杆的运动规律。
由以上分析可知该题的解题步骤可分成四步:
一、 根据从动件运动规律,求摆杆的运动规律—角位移
τ、角
速度
τ 、角加速度τ
二、 求凸轮的理论廓线 三、 求凸轮轮廓的压力角
?及曲率半径ρ
四、 求凸轮实际轮廓坐标和加工坐标
解:
一、 根据从动件运动规律,求摆杆的运动规律—角位移
τ、角速
度
τ 、角加速度τ 1) 求摆杆的角位移τ
由图1可知a b C )
t (y τ*=,
其中,C b
=c b
b
j e θ,y(t)=S(T)*h ,
为已知量,取T sin221
T )T (S ππ
-
=,则y(t)为已知量,故a τ可求,又
b0b0a θτττ--= (2-1)
式中,b0τ
、
b0θ为已知量,因此τ可求。
2) 求摆杆的角速度τ 由式(2-1)可知a ττ =, a τ 可以求出。 3) 求摆杆的角加速度τ 因为a ττ =,其中a τ 可以求出,故τ
可求。 二、 求凸轮的理论廓线
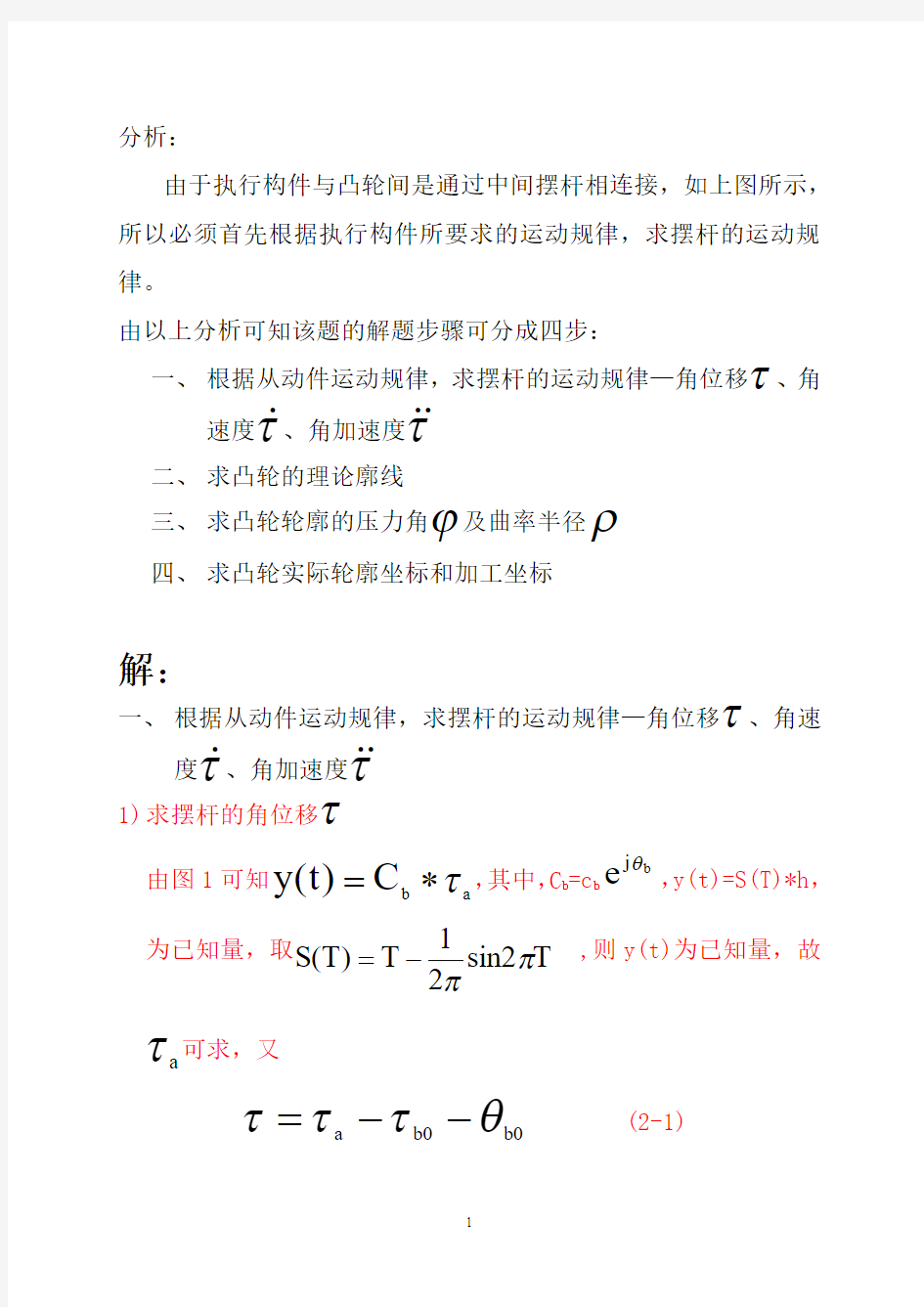
图2-2
在图2-2中,O 1是凸轮的转动中心,O b 为摆杆的摆动中心。起始位置是设计凸轮时,根据结构要求定出的。 故1
j 11
e
c C
ν=、
b0
j 202e
b B τ=、α
j 0303
e
p P =均为已
知量。
经过时间t ,凸轮转过
t ωθ=角,至图中双点划线位置,
这时摆杆从B 摆到B 、
,幅角为b τ。b τ可由式b0
a b θττ-=求得,故是已知量。因而,可从矢量B O '?21O 中求得凸轮的矢径
31P B O ='
,其方程式为
123C B P +=
或
1
j 1b
j 2j e c e b re υτα
+= (2-2)
凸轮的轮廓线方程式,可将3P 按ω-方向转过θ角求得
)
(j 34e
P P θ-=
即
)
1(j 1)
-b j(2)
(j 12j e
c e
b e
)C B (re θυθτθβ
--+=+=上式中,
2b 、1c 、b τ、1υ、θ均为已知量,将上式与矢
量三角形解法类型一的极坐标方程(2-24)相比较,则有
r p c =,βθ=c
2b b k =,θτθ-=b b 1a c k =,θυθ-=1a
故用CASE1的子程序解上式中的位置量即得凸轮理论廓线极
坐标r 、
β。
三、 求凸轮轮廓的压力角
?及曲率半径ρ
1) 求压力角
?
前已述及,要求压力角?,首先要求凸轮轮廓的法线,
这就需要一凸轮矢径
4P 求导,令
φ
j 4e s P =
根据式(2-3),有
][)()1(1
)(24'+='=--?θγθτβj b j j e c e b re P
故得
)
1(1)
(2)(θγθτφ
θθτ-?
-?
??---=j b j b j e
jc e
b j e s (2-4)
式中,
1
12c b b b 、、、、、、γθτθτ?
?
均为已知量,故调用CASE1子程序可求解s 及φ。
将式(2-4)与矢量三角形解法类型一的极坐标方程(2-24)相比
较,则有(其中合并前两项且2
j
e
j π
=)
s p c =, φθ=c
2b )b 2
j(b b )(e
k --=+-θ
τθτπ
, θτθ-=b b θ
1a jc k =, θυθ-=1a 此处
φ表示凸轮在起始位置时矢径4P 的切线方向,而要计
算压力角,需求当凸轮与滚子相接触时的切线方向,它可由4
P 的切线方向逆时针转过
θ角而得到,即 )
(j j 43e s e P P θφθ+==
故其法线方向为
)
(j je
θφ+
而从动件的运动方向为2B 的速度方向,已知
b
j 22e
b B τ=
故其速度方向为
b
j je
τ
根据式(2-44),压力角为 b τθφψ-+=
2) 求曲率半径
ρ
对式(2-4)求导,得
)
1(12
)
(22
)
(2)()(s θγθτθτφ
φ
θθττ?-?
-?
?-?
???---=+j b j b b j b j j e
c e
b e
b j e s j e 上式两边除以
φ
j e
,得
)
1(12)(22)(2)()(s φθγφθτφθτθθττ?--?
--?
?
--?
??
?---=+j b j b b j b e c e b e b j s j 取此两边的虚部,得
)(sin c )()(sin b )()(cos b s 112b 22b b 2b φθυθφθτθ
τφθττφ---------= 解出s φ后,再由式?
??
?
?
===φ
φ
φ
ρs s s d ds 2
)
(求解曲率半径
ρ
四、 求凸轮实际轮廓坐标和加工坐标
若刀具半径与滚子半径相同,则由式(2-3)求出的滚子中心轨迹坐标,即加工坐标。若刀具半径与滚子半径不同,如下图3所示,则还需求加工坐标。
图
2-3
当滚子直径
d 小于刀具直径c d 时,设凸轮实际轮廓坐标
p
j p p e
r P β=,加工坐标为
c
j p c e
r P β=,则由图3中的矢
量三角形得
????
?--=-=φβ
βφβ
βj c j c
j c j j p
j p e
d d j r
e e
r e d j re e r 2
2 (2-5)
式中,滚子直径d 和加工轮廓的刀具直径c d 为已知量,理论轮廓
坐标r 、
β及其切线方向φ以求出,故可用CASE1子程序求出实
际轮廓坐标p r 、
p β、和刀具中心轨迹,即加工坐标c r 、c β。
将式(2-5)与矢量三角形解法类型一的极坐标方程(2-24)相比较,则有
求实际轮廓坐标p r 、
p β
p c r p =,p c βθ=
r k b =,βθ=b
2
d -d k c a =, φθ=a
求加工坐标c r 、
c β
c c r p =,c c βθ= r k b =,βθ=b
2
d k a =, φθ=a
当滚子直径
d 小于刀具直径c d 时,设凸轮实际轮廓坐标
p
j p p e
r P β=,加工坐标为
c
j p c e
r P β=,则由图3中的矢
量三角形(参考)得
????
?--=-=φβ
βφβ
βj c j c
j c j j p
j p e
d d j r
e e
r e d j re e r 2
2 (2-6)
式中,滚子直径d 和加工轮廓的刀具直径c d 为已知量,理论轮廓
坐标r 、
β及其切线方向φ以求出,故可用CASE1子程序求出实
际轮廓坐标p r 、
p β、和刀具中心轨迹,即加工坐标c r 、c β。
将式(2-6)与矢量三角形解法类型一的极坐标方程(2-24)相比较,则有
求实际轮廓坐标p r 、
p β
p c r p =,p c βθ=
r k b =,βθ=b
2
d -d k c a =, φθ=a
求加工坐标c r 、
c β
c c r p =,c c βθ= r k b =,βθ=b
2
d k a =, φθ=a
注:关于压力角的问题
经查《精密机械设计基础》 赵跃进等主编 北京理工大学出版社 有关摆动从动件:压力角<=
45
~35
原始数据
(1) 从动件起始位置:
00=y
(2) 从动件的最大升程:
)(45mm y h =
(3)从动件的运动规律:)2sin 21
()T (S T T ππ
-= (4) 传动件上摆杆半径:)(56mm a =
(5) 传动件下摆杆到滚子的半径:)(062
mm b =
(6) 凸轮旋转中心到传动件旋转中心的距离:
)(091mm c =
(7) 中心角:?=001h θ
(8)
?001b0=θ
(9) ?011a0=τ (10) ?0121=
γ (11) 滚子半径:
)(6mm d r =
(12) 加工刀具半径:
)(52mm d c =
五、 程序编制及其说明
#include
#include
double case1_thcout(double akb,double aka,double thb,double tha) {
return atan2(akb*sin(thb)+aka*sin(tha),akb*cos(thb)+aka*cos(tha)); }
double case1_pcout(double akb,double aka,double thb,double tha) {
double thcout;
thcout=atan2(akb*sin(thb)+aka*sin(tha),akb*cos(thb)+aka*cos(tha)); return akb*cos(thb-thcout)+aka*cos(tha-thcout); }
double case2_albout(double aka,double thc,double thb,double tha)
{
return -aka*sin(tha-thc)/sin(thb-thc);
}
double case2_alcout(double aka,double thc,double thb,double tha)
{
return aka*sin(tha-thb)/sin(thc-thb);
}
void main(void)
{
unsigned int i;
double a=65;
double yh=35;
double b2=60;
double c1=90;
double dr=6;
double dcut=25;
double con,ccn,thb0,gam,thh,PI=4.0*atan(1.0);
double t,y,psi,r,beta,rp,rc,betac,betap;
double rho,dphids,phi,ds,dta,dtb,ddta,ddtb,dth,ddy;
double th,ta,tb,dy,ta0;
con=atan(1.0)/45.0;
ccn=8.0*atan(1.0);
thb0=100*con;
ta0=110*con;
gam=120*con;
thh=100*con;
printf("THETA R BETA PSI RHO RP BETAP RC BETAC \n");
printf("_____________________________________________________________________ __________\n");
for(i=1;i<=71;i++)
{
t=(i-1.0)/70;
y=(t-sin(ccn*t)/ccn)*yh;
ta=ta0-y/a;
tb=ta-thb0;
if((i==1)||(i==71))
{
dta=0;
ddta=0;
}
else
{
dy=(1-cos(ccn*t))*yh;
ddy=ccn*sin(ccn*t)*yh;
dta=-dy/a;ddta=-ddy/a;
};
th=thh*t;
dth=thh;
r=case1_pcout(b2,c1,tb-th,gam-th);
beta=case1_thcout(b2,c1,tb-th,gam-th);
dtb=dta;
ddtb=ddta;
ds=case1_pcout((dtb-dth)*b2,dth*c1,tb-th+PI/2,gam-th+1.5*PI);
phi=case1_thcout((dtb-dth)*b2,dth*c1,tb-th+PI/2,gam-th+1.5*PI);
psi=phi+th-tb;
while((psi-ccn)>0)
{
psi=psi-ccn;
}
while((psi+ccn)<=0)
{
psi=psi+ccn;
}
dphids=ddtb*b2*cos(tb-th-phi)-(dtb-dth)*(dtb-dth)*b2*sin(tb-phi-th)-dth*dth*c1*sin(gam-th-phi);
if(fabs(dphids)<0.000001)dphids=0.00001;
rho=ds*ds/dphids;
if(fabs(rho)>9999)rho=9999;
rp=case1_pcout(r,dr/2,beta,phi+1.5*PI);
betap=case1_thcout(r,dr/2,beta,phi+1.5*PI);
rc=case1_pcout(r,(dr-dcut)/2,beta,phi+1.5*PI);
betac=case1_thcout(r,(dr-dcut)/2,beta,phi+1.5*PI);
beta=beta/con;
psi=psi/con;
betap=betap/con;
betac=betac/con;
if((i>1)&&(fmod((i-1),5)<0.0001))
{
printf("\n");
}
printf("%3d %8.4f %8.4f %8.4f %10.4f %8.4f %8.4f %8.4f %8.4f\n",i-1,r,beta,psi,rho,rp,be tap,rc,betac);
}
printf("_____________________________________________________________________ __________\n");
}
计算结果:
THETA R BETA PSI RHO RP BETAP RC BETAC
_______________________________________________________________________________
0 89.4773 80.9409 -19.0591 -89.4773 86.4773 80.9409 98.9773 80.9409
1 89.4767 79.512
2 -19.1037 -84.1698 86.4767 79.5138 98.9767 79.5079
2 89.4726 78.0827 -19.235
3 -79.5099 86.4726 78.0890 98.9726 78.0655
3 89.4615 76.6517 -19.4495 -75.4318 86.4616 76.6657 98.9613 76.6130
4 89.4400 75.2184 -19.7414 -71.8733 86.4403 75.2431 98.9394 75.1501
5 89.4048 73.7820 -20.1051 -68.7772 86.4053 73.8203 98.9032 73.6761
6 89.3525 72.3419 -20.5343 -66.0923 86.353
7 72.3966 98.8493 72.1907
7 89.2802 70.8975 -21.0218 -63.7727 86.2823 70.9711 98.7743 70.6938
8 89.1848 69.4480 -21.5603 -61.7779 86.1883 69.5430 98.6750 69.1850
9 89.0636 67.9929 -22.1420 -60.0722 86.0690 68.1117 98.5484 67.6644
10 88.9139 66.5317 -22.7592 -58.6238 85.9220 66.6763 98.3914 66.1319
11 88.7334 65.0641 -23.4038 -57.4047 85.7449 65.2365 98.2016 64.5875
12 88.5200 63.5897 -24.0680 -56.3900 85.5357 63.7916 97.9766 63.0316
13 88.2717 62.1082 -24.7440 -55.5575 85.2926 62.3412 97.7142 61.4642
14 87.9870 60.6195 -25.4243 -54.8874 85.0139 60.8850 97.4127 59.8859
15 87.6643 59.1235 -26.1018 -54.3618 84.6982 59.4227 97.0706 58.2968
16 87.3027 57.6204 -26.7695 -53.9651 84.3447 57.9544 96.6867 56.6977
17 86.9012 56.1102 -27.4213 -53.6831 83.9523 56.4799 96.2603 55.0889
18 86.4595 54.5932 -28.0510 -53.5035 83.5206 54.9995 95.7909 53.4713
19 85.9772 53.0699 -28.6532 -53.4155 83.0494 53.5134 95.2783 51.8456
20 85.4546 51.5407 -29.2229 -53.4099 82.5387 52.0220 94.7228 50.2125
21 84.8919 50.0062 -29.7556 -53.4792 81.9888 50.5257 94.1250 48.5730
22 84.2900 48.4671 -30.2470 -53.6175 81.4005 49.0252 93.4859 46.9282
23 83.6498 46.9242 -30.6934 -53.8209 80.7746 47.5211 92.8068 45.2791
24 82.9727 45.3784 -31.0913 -54.0871 80.1124 46.0142 92.0892 43.6269
25 82.2605 43.8307 -31.4375 -54.4159 79.4154 44.5053 91.3352 41.9727
26 81.5149 42.2819 -31.7291 -54.8093 78.6855 42.9955 90.5470 40.3181
27 80.7382 40.7333 -31.9632 -55.2714 77.9248 41.4855 89.7274 38.6643
28 79.9330 39.1859 -32.1373 -55.8093 77.1355 39.9764 88.8791 37.0129
29 79.1021 37.6408 -32.2486 -56.4328 76.3203 38.4692 88.0055 35.3653
30 78.2482 36.0991 -32.2946 -57.1552 75.4821 36.9648 87.1099 33.7231
31 77.3748 34.5620 -32.2726 -57.9940 74.6237 35.4641 86.1962 32.0879
32 76.4852 33.0304 -32.1801 -58.9713 73.7485 33.9681 85.2682 30.4614
33 75.5829 31.5054 -32.0140 -60.1153 72.8598 32.4774 84.3300 28.8452
34 74.6715 29.9879 -31.7717 -61.4619 71.9609 30.9927 83.3860 27.2410
35 73.7550 28.4788 -31.4500 -63.0562 71.0556 29.5147 82.4404 25.6503
36 72.8371 26.9787 -31.0458 -64.9561 70.1474 28.0437 81.4977 24.0748
37 71.9217 25.4883 -30.5559 -67.2364 69.2398 26.5799 80.5624 22.5161
38 71.0126 24.0080 -29.9771 -69.9943 68.3367 25.1235 79.6389 20.9756
39 70.1138 22.5380 -29.3061 -73.3589 67.4416 23.6742 78.7316 19.4547
40 69.2288 21.0786 -28.5399 -77.5042 66.5579 22.2319 77.8447 17.9548
41 68.3613 19.6297 -27.6757 -82.6699 65.6893 20.7959 76.9822 16.4770
42 67.5148 18.1910 -26.7112 -89.1938 64.8389 19.3656 76.1479 15.0224
43 66.6925 16.7622 -25.6445 -97.5667 64.0101 17.9402 75.3451 13.5917
44 65.8976 15.3427 -24.4750 -108.5251 63.2058 16.5185 74.5770 12.1856
45 65.1327 13.9318 -23.2029 -123.2207 62.4288 15.0995 73.8462 10.8044
46 64.4006 12.5287 -21.8299 -143.5466 61.6820 13.6820 73.1547 9.4482
47 63.7033 11.1325 -20.3595 -172.8194 60.9677 12.2646 72.5043 8.1167
48 63.0430 9.7420 -18.7972 -217.3579 60.2882 10.8460 71.8960 6.8092
49 62.4211 8.3561 -17.1507 -290.6930 59.6455 9.4251 71.3304 5.5245
50 61.8389 6.9738 -15.4300 -427.3788 59.0413 8.0009 70.8076 4.2611
51 61.2975 5.5938 -13.6476 -747.0438 58.4771 6.5723 70.3270 3.0168
52 60.7974 4.2151 -11.8184 -2101.8374 57.9541 5.1387 69.8878 1.7892
53 60.3389 2.8365 -9.9593 4737.9070 57.4731 3.6996 69.4888 0.5752
54 59.9219 1.4570 -8.0891 1451.3136 57.0345 2.2550 69.1286 -0.6284
55 59.5460 0.0757 -6.2276 1072.2078 56.6385 0.8049 68.8056 -1.8254
56 59.2104 -1.3082 -4.3953 1080.0290 56.2845 -0.6504 68.5180 -3.0195
57 58.9140 -2.6953 -2.6125 1507.7408 55.9719 -2.1102 68.2640 -4.2146
58 58.6556 -4.0862 -0.8989 6683.8559 55.6994 -3.5738 68.0420 -5.4144
59 58.4333 -5.4811 0.7274 -1664.6419 55.4655 -5.0403 67.8501 -6.6224
60 58.2453 -6.8804 2.2499 -638.5025 55.2680 -6.5086 67.6867 -7.8420
61 58.0894 -8.2841 3.6545 -367.6284 55.1047 -7.9776 67.5498 -9.0758
62 57.9630 -9.6921 4.9294 -247.9119 54.9728 -9.4464 67.4378 -10.3262
63 57.8636 -11.1042 6.0652 -182.5574 54.8694 -10.9139 67.3485 -11.5952
64 57.7882 -12.5202 7.0549 -142.3523 54.7914 -12.3790 67.2799 -12.8842
65 57.7337 -13.9395 7.8936 -115.6011 54.7353 -13.8408 67.2297 -14.1942
66 57.6970 -15.3619 8.5787 -96.7721 54.6976 -15.2983 67.1953 -15.5257
67 57.6746 -16.7866 9.1090 -82.9403 54.6748 -16.7507 67.1740 -16.8791
68 57.6630 -18.2132 9.4850 -72.4296 54.6630 -18.1972 67.1629 -18.2544
69 57.6587 -19.6410 9.7084 -64.2195 54.6587 -19.6370 67.1587 -19.6514
70 57.6581 -21.0695 9.7821 -57.6581 54.6581 -21.0695 67.1581 -21.0695 _______________________________________________________________________________ Press any key to continue
3-1 什么样的构件叫凸轮什么样的机构是凸轮机构凸轮机构的功用是什么 答:凸轮是一个具有曲线轮廓或凹槽的构件。 凸轮机构一般是由凸轮,从动件和机架三个构件组成的高副机构。凸轮通常作连续等速转动,从动件根据使用要求设计使它获得一定规律的运动,凸轮机构能实现复杂的运动要求,广泛用于各种自动化和半自动化机械装置中。 凸轮机构主要作用是使从动杆按照工作要求完成各种复杂的运动,包括直线运动、摆动、等速运动和不等速运动。 3-2 滚子从动件的滚子半径大小对凸轮工作有什么影响若某一凸轮机构的滚子损坏后,是否可以任取一滚子来代替为什么 答:对于滚子从动件的凸轮机构,滚子半径的大小常常影响到凸轮实际轮廓曲线的形状,设计时要选择合适的滚子半径T r ,否则会出现运动失真的情况。 对于滚子从动件的凸轮机构,如果滚子损坏不能任取一滚子代替。因为如果选取滚子与原有滚子尺寸不同,从动件的运动规律会发生变化;如果希望从动件的运动规律不变,需要选取与原有凸轮相匹配的的滚子,或者修改凸轮,即凸轮在原理论廓线不变的情况下,作其法向等距曲线并使之距离等于新滚子半径得到新的实际轮廓曲线,重新加工凸轮,后者较繁琐,不宜采取。 3-3 凸轮压力角越小越好吗为什么 ' 答:凸轮压力角越小越好。 凸轮机构压力角:推杆在与凸轮的接触点上所受的正压力与推杆上该点的速度方向所夹的锐角。压力角越大,将造成所受的正压力越大,甚至达到无穷大而出现自锁,因而,从减小推力,避免自锁,使机构具有良好的受力状况来看,压力角越小越好。 3-4 为什么平底直动从动件盘形凸轮机构的凸轮轮廓曲线一定要外凸滚子直动从动件盘形凸轮机构的凸轮轮廓曲线却允许内凹,而且内凹段一定不会出现运动失真 答:对于平底直动从动件盘形凸轮机构,只有凸轮廓线外凸,才能保证凸轮轮廓曲线上的所有点都能与从动件平底接触;对于滚子直动从动件盘形凸轮机构,凸轮实际廓线是沿理论廓线,以滚子半径为间距,作其法向等距曲线得到的,当凸轮轮廓曲线内凹时,实际廓线各点的曲率半径为对应理论廓线各点曲率半径与滚子半径之和,因而不管滚子半径多大,实际廓线各点的曲率半径都大于零,所以可以正常运动并且不会出现失真现象。 3-5 何谓凸轮压力角压力角的大小对机构有何影响用作图法求题3-5图中各凸轮由图示位置逆转45°时,凸轮机构的压力角,并标在题3-5图中。 答:从动件所受作用力F 与受力点速度ν间所夹的锐角称为凸轮机构的压力角,用α表示。 αα cos sin F F F F y x == 由上述关系式知,压力角α愈大,有效分力Fy 愈小,有害分力Fx 愈大。当α角大到某一数值时,必将会出现F y 凸轮机构练习题 Company number:【WTUT-WT88Y-W8BBGB-BWYTT-19998】 凸轮机构练习题 一、单项选择题(从给出的A、B、C、D中选一个答案) 1 与连杆机构相比,凸轮机构最大的缺点是。 A.惯性力难以平衡 B.点、线接触,易磨损 C.设计较为复杂 D.不能实现间歇运动 2 与其他机构相比,凸轮机构最大的优点是。 A.可实现各种预期的运动规律 B.便于润滑 C.制造方便,易获得较高的精度 D.从动件的行程可较大 3 盘形凸轮机构的压力角恒等于常数。 A.摆动尖顶推杆 B.直动滚子推杆 C.摆动平底推杆 D.摆动滚子推杆 4 对于直动推杆盘形凸轮机构来讲,在其他条件相同的情况下,偏置直动推杆与对心直动推杆相比,两者在推程段最大压力角的关系为关系。 A.偏置比对心大 B.对心比偏置大 C.一样大 D.不一定 5 下述几种运动规律中,既不会产生柔性冲击也不会产生刚性冲击,可用于高速场合。 A.等速运动规律 B.摆线运动规律(正弦加速度运动规律) C.等加速等减速运动规律 D.简谐运动规律(余弦加速度运动规律) 6 对心直动尖顶推杆盘形凸轮机构的推程压力角超过许用值时,可采用措施来解决。 A.增大基圆半径 B.改用滚子推杆 C.改变凸轮转向 D.改为偏置直动尖顶推杆 7.()从动杆的行程不能太大。 A. 盘形凸轮机构 B. 移动凸轮机构 C. 圆柱凸轮机构 8.()对于较复杂的凸轮轮廓曲线,也能准确地获得所需要的运动规律。 A 尖顶式从动杆 B.滚子式从动杆 C. 平底式从动杆 9.()可使从动杆得到较大的行程。 A. 盘形凸轮机构 B 移动凸轮机构 C. 圆柱凸轮机构 10.()的摩擦阻力较小,传力能力大。 A 尖顶式从动杆 B. 滚子式从动杆 C 平底式从动杆 11.()的磨损较小,适用于没有内凹槽凸轮轮廓曲线的高速凸轮机构。 A. 尖顶式从动杆 B.滚子式从动杆 C. 平底式从动杆 12.计算凸轮机构从动杆行程的基础是()。 A 基圆 B. 转角 C 轮廓曲线 凸轮机构习题解答复习与练习题参考答案 一、单项选择题 1 B 2 A 3 C 4 D 5 B 6 A 7.A 8. A 9. C 10 .B 11. C 12. A 13. .B 14. .B 15 . A 16. B 17 . C 18 .B 19 .A 20 .B 21 .B 22 .C 其他答案在文后: 一、单项选择题(从给出的A 、B 、C 、D 中选一个答案) 1 与连杆机构相比,凸轮机构最大的缺点是。 A .惯性力难以平衡 B .点、线接触,易磨损 C .设计较为复杂 D .不能实现间歇运动 2 与其他机构相比,凸轮机构最大的优点是。 A .可实现各种预期的运动规律 B .便于润滑 C .制造方便,易获得较高的精度 D .从动件的行程可较大 3 盘形凸轮机构的压力角恒等于常数。 A .摆动尖顶推杆 B .直动滚子推杆 C .摆动平底推杆 D .摆动滚子推杆 4 对于直动推杆盘形凸轮机构来讲,在其他条件相同的情况下,偏置直动推杆与对心直动推杆相比,两者在推程段最大压力角的关系为关系。 A .偏置比对心大 B .对心比偏置大 C .一样大 D .不一定 5 既不会产生柔性冲击也不会产生刚性冲击,可用于高速场合。 A .等速运动规律 B .摆线运动规律(正弦加速度运动规律) C .等加速等减速运动规律 D .简谐运动规律(余弦加速度运动规律) 6 对心直动尖顶推杆盘形凸轮机构的推程压力角超过许用值时,可采用措施来解决。 A .增大基圆半径 B .改用滚子推杆 C .改变凸轮转向 D .改为偏置直动尖顶推杆 7.()从动杆的行程不能太大。 A. 盘形凸轮机构 B. 移动凸轮机构 C. 圆柱凸轮机构 8.()对于较复杂的凸轮轮廓曲线,也能准确地获得所需要的运动规律。 A 尖顶式从动杆 B. 滚子式从动杆 C. 平底式从动杆 9.()可使从动杆得到较大的行程。 A. 盘形凸轮机构 B 移动凸轮机构 C. 圆柱凸轮机构 10.()的摩擦阻力较小,传力能力大。 A 尖顶式从动杆 B. 滚子式从动杆 C 平底式从动杆 11. ()的磨损较小,适用于没有内凹槽凸轮轮廓曲线的高速凸轮机构。 A. 尖顶式从动杆 B. 滚子式从动杆 )。 C. 平底式从动杆 12.计算凸轮机构从动杆行程的基础是( A 基圆 B. 转角 C 轮廓曲线 )。 13.凸轮轮廓曲线上各点的压力角是( A. 不变的 B. 变化的 )。 14.凸轮压力角的大小与基圆半径的关系是( A 基圆半径越小,压力角偏小 15.压力角增大时,对()。 B. 基圆半径越大,压力角偏小 A. 凸轮机构的工作不利 C. 凸轮机构的工作无影响 B. 凸轮机构的工作有利 1.图示凸轮机构从动件推程运动线图是由哪两种常用的基本运动规律组合而成?并指出有无冲击。如果有冲击,哪些位置上有何种冲击?从动件运动形式为停-升-停。 (1) 由等速运动规律和等加速等减速运动规律组合而成。 (2) 有冲击。 (3) ABCD 处有柔性冲击。 2. 有一对心直动尖顶从动件盘形凸轮机构,为改善从动件尖端的磨损情况,将其尖端改为滚子,仍使用原来的凸轮,这时该凸轮机构中从动件的运动规律有无变化?简述理 由。 (1) 运动规律发生了变化。 (见下图 ) (2)采用尖顶从动件时,图示位置从动件的速度v O P 2111=ω,采用滚子从动件时,图示位置的速度 '='v O P 2111ω,由于O P O P v v 1111 22≠'≠',;故其运动规律发生改变。 3. 在图示的凸轮机构中,画出凸轮从图示位置转过60?时从动件的位置及从动件的位移s。 总分5分。(1)3 分;(2)2 分 (1) 找出转过60?的位置。 (2) 标出位移s。 4. 画出图示凸轮机构从动件升到最高时的位置,标出从动件行程h ,说明推程运动角和回程运动角的大小。 总分5分。(1)2 分;(2)1 分;(3)1 分;(4)1 分 (1) 从动件升到最高点位置如图示。 (2) 行程h 如图示。 (3)Φ=δ0-θ (4)Φ'=δ' 0+θ 5.图示直动尖顶从动件盘形凸轮机构,凸轮等角速转动,凸轮轮廓在推程运动角Φ=? 从动件行程h=30 mm,要求: (1)画出推程时从动件的位移线图s-?; (2)分析推程时有无冲击,发生在何处?是哪种冲击? - 总分10分。(1)6 分;(2)4 分 (1)因推程时凸轮轮廓是渐开线,其从动件速度为常数v=r0?ω,其位移为直线, 如图示。 如图(a )所示的凸轮机构推杆的速度曲线由五段直线组成。要求:在题图上画出推杆的位移 曲线、加速度曲线;判断哪几个位置有冲击存在,是刚性冲击还是柔性冲击;在图示的 F 位置, 凸轮与推杆之间有无惯性力作用,有无冲击存在 a A I A 2 I 2 、 图 【分析】要正确地根据位移曲线、速度曲线和加速度曲线中的一个画出其余的两个,必须对 常见四推杆的运动规律熟悉。至于判断有无冲击以及冲击的类型,关键要看速度和加速度有无突 变。若速度突变处加速度无穷大,则有刚性冲击;若加速度的突变为有限值,则为柔性冲击。 解:由图(a )可知,在0A 段内(0<5^2),/因推杆的速度v=0,故此段为推杆的近休段,推杆的 位移及加速度均为零。在 AB 段内(n /2 3"因)v>0,故为推杆的推程段。且在 AB 段内,因速 度线图为上升的斜直线,故推杆先等加速上升,位移曲线为抛物线运动曲线,而加速度曲线为正 的水平直线段;在 BC 段内,因速度曲线为水平直线段,故推杆继续等速上升,位移曲线为上升 的斜直线,而加速度曲线为与 5轴重合的线段;在 CD 段内,因速度线为下降的斜直线,故推杆 继续等减速上升,位移曲线为抛物线,而加速度曲线为负的水平线段。在 DE 段内(3 n/2 <5<,2n ) 因v<0,故为推杆的回程段,因速度曲线为水平线段,故推杆做等速下降运动。其位移曲线为下 降的斜直线,而加速度曲线为与 穷大。综上所述作出推杆的速度 由推杆速度曲线和加速度曲线知,在 大和正无穷大。故 凸轮机构在 D 和E 处有刚性冲击。而在 故在这几处凸轮机构有柔性冲击。 在F 处有正的加速度值,故有惯性力,但既无速度突变, 击存在。 【评注】本例是针对推杆常用的四种运动规律的典型 题。 5轴重合的线段,且在 D 和E 处其加速度分别为负无穷大和正无 v 及加速度a 线图如图(b )及(C )所示。 D 及E 处,有速度突变,且相应的加速度分别为负无穷 A ,B ,C 及D 处加速度存在有限突变, 也无加速度突变,因此, F 处无冲 解题的关键是对常用运动规律的位 移、速度以及加速度线图熟练,特别是要会作常用运动规律的位移、速度以及加速度线图。 对于图(a )所示的凸轮机构,要求: (1) (2) (3) (4) 写出该凸轮机构的名称; 在图上标出凸轮的合理转向。 画出凸轮的基圆; 画出从升程开始到图示位置时推杆的位移 S ,相对应的凸轮转角 ,B 点的压力角 (5) 画出推杆的行程Ho 第九章凸轮机构及其设计 第一节凸轮机构的应用、特点及分类 1.凸轮机构的应用 在各种机械,特别是自动机械和自动控制装置中,广泛地应用着各种形式的凸轮机构。 例1内燃机的配气机构 当凸轮回转时,其轮廓将迫使推杆作往复摆动,从而使气阀开启或关闭(关闭是借弹簧的作用),以控制可燃物质在适当的时间进入气缸或排出废气。至于气阀开启和关闭时间的长短及其速度和加速度的变化规律,则取决于凸轮轮廓曲线的形状。 例2自动机床的进刀机构 当具有凹槽的圆柱凸轮回转时,其凹槽的侧面通过嵌于凹槽中的滚子迫使推杆绕其轴作往复摆动,从而控制刀架的进刀和退刀运动。至于进刀和退刀的运动规律如何,则决定于凹槽曲线的形状。 2.凸轮机构及其特点 (1)凸轮机构的组成 凸轮是一个具有曲线轮廓或凹槽的构件。凸轮通常作等速转动,但也有作往复摆动或移动的。推杆是被凸轮直接推动的构件。因为在凸轮机构中推杆多是从动件,故又常称其为从动件。凸轮机构就是由凸轮、推杆和机架三个主要构件所组成的高副机构。 (2)凸轮机构的特点 1)优点:只要适当地设计出凸轮的轮廓曲线,就可以使推杆得到各种预期的运动规律,而且机构简单紧凑。 2)缺点:凸轮廓线与推杆之间为点、线接触,易磨损,所以凸轮机构多用在传力不大的场合。 3.凸轮机构的分类 凸轮机构的类型很多,常就凸轮和推杆的形状及其运动形式的不同来分类。 (1)按凸轮的形状分 1)盘形凸轮(移动凸轮) 2)圆柱凸轮 盘形凸轮是一个具有变化向径的盘形构件绕固定轴线回转。移动 凸轮可看作是转轴在无穷远处的盘形凸轮的一部分,它作往复直线移动。圆柱凸轮是一个在圆柱面上开有曲线凹槽,或是在圆柱端面上作 出曲线轮廓的构件,它可看作是将移动凸轮卷于圆柱体上形成的。盘形凸轮机构和移动凸轮机构为平面凸轮机构,而圆柱凸轮机构是一种 空间凸轮机构。盘形凸轮机构的结构比较简单,应用也最广泛,但其推杆的行程不能太大,否则将使凸轮的尺寸过大。 (2)按推杆的形状分 1)尖顶推杆。这种推杆的构造最简单,但易磨损,所以只适用于作用力不大和速度较低的场合(如用于仪表等机构中)。 2)滚子推杆。滚子推杆由于滚子与凸轮轮廓之间为滚动摩擦,所以磨损较小,故可用来传递较大的动力,因而应用较广。 第三章配气机构习题二答案 一、填空题 1.发动机的配气机构由气门组和气门传动组两部分组成。 2.发动机凸轮轴的布置形式包括凸轮轴上置、中置式和下置式三种。 3.曲轴与凸轮轴之间的传动方式为齿轮传动、链条传动和齿形带传动。 4.配气机构按气门布置形式可分为顶置式式和侧置式式两种。 5.顶置式气门配气机构的气门传动组由正时齿轮、凸轮轴、挺杆、推杆、调整螺钉、摇臂、摇臂轴等组成。 6.CA6102发动机凸轮轴上的凸轮是顶动挺杆的,偏心轮是推动汽油泵的,螺旋齿轮是驱动机油泵和分电器的。 二、解释术语1.气门间隙:发动机在冷态下时,在气门关闭的状态下,气门杆尾部与摇杆之间留有一定的间隙。 三、判断题(正确打√、错误打×) 1.排气门的材料一般要比进气门的材料好些。(√) 2.进气门头部直径通常要比排气门的头部大,而气门锥角有时比排气门的小。(√) 3.CA1092型汽车发动机凸轮轴的轴向间隙,可通过改变隔圈的厚度进行调整,其间隙的大小等于隔圈厚度减去止推凸缘的厚度。(√) 4.顶置式气门可由凸轮轴上的凸轮压动摇臂顶开,其关闭是依靠气门弹簧实现的。(√) 5.在冷态下,气门脚及其传动机件之间无间隙或间隙过小,热态时,气门会因温度升高而膨胀,势必关闭不严,造成漏气。(√ ) 6.汽车运行中如发现气门响声过大,应及时调整气门间隙,并使间隙值符合原厂家规定。(√ ) 四、选择题 1.安装不等距气门弹簧时,向着气缸体或气缸盖的一端应该是(A)。 A.螺距小的 B、螺距大的 2.下述各零件中不属于气门组的是(C )。 A.气门弹簧 B.气门座 C.摇臂轴 D.气门导管 3. 气门、气门弹簧、气门弹簧座、气门导管等组成( A )。 A、气门组 B、配气机构 C、气门驱动组 D、顶置气门组 五、问答题 1.气门导管的作用是什么? 保证气门作直线往复运动,与气门座正确贴合(导向作用);在气缸体或气缸盖与气门杆之间起导热作用。 2.为什么有的配气机构中采用两个套装的气门弹簧? 气门弹簧长期在交变载荷下工作,容易疲劳折断,尤其当发生共振时,断裂的可能性更大。所以在一些大功率发动机上采用两根直径及螺距不同、螺旋方向相反的内、外套装的气门弹簧。由于两簧的结构、质量不一致,自然振动频率也因而不同,从而减少了共振的机会,既延长了簧的工作寿命,又保证了气门的正常工作(当一弹簧断折的情况下)。 ③气门重叠角为30°曲轴转角。④进、排气门的开、闭时刻相对于上下止点来说都是早开、迟闭。 3.气门弹簧起什么作用?为什么在装配气门弹簧时要预先压缩? 保证气门及时落座并紧密贴合,防止气门在发动机振动时发生跳动,破坏其密封性。气门弹簧安装时预先压缩产生的安装预紧力是用来克服气门关闭过程中气门及其传动件的惯性力,消除各传动件之间因惯性力作用而产生的间隙,实现其功用的。 凸轮机构考试复习与练习题 一、单项选择题(从给出的A、B、C、D中选一个答案) 1 与连杆机构相比,凸轮机构最大的缺点是。 A.惯性力难以平衡B.点、线接触,易磨损 C.设计较为复杂D.不能实现间歇运动 2 与其他机构相比,凸轮机构最大的优点是。 A.可实现各种预期的运动规律B.便于润滑 C.制造方便,易获得较高的精度D.从动件的行程可较大 3 盘形凸轮机构的压力角恒等于常数。 A.摆动尖顶推杆B.直动滚子推杆 C.摆动平底推杆D.摆动滚子推杆 4 对于直动推杆盘形凸轮机构来讲,在其他条件相同的情况下,偏置直动推杆与对心直动推杆相比,两者在推程段最大压力角的关系为关系。 A.偏置比对心大B.对心比偏置大 C.一样大D.不一定 5 下述几种运动规律中,既不会产生柔性冲击也不会产生刚性冲击,可用于高速场合。 A.等速运动规律B.摆线运动规律(正弦加速度运动规律) C.等加速等减速运动规律D.简谐运动规律(余弦加速度运动规律) 6 对心直动尖顶推杆盘形凸轮机构的推程压力角超过许用值时,可采用措施来解决。 A.增大基圆半径B.改用滚子推杆 C.改变凸轮转向D.改为偏置直动尖顶推杆 7.()从动杆的行程不能太大。 A. 盘形凸轮机构 B. 移动凸轮机构 C. 圆柱凸轮机构 8.()对于较复杂的凸轮轮廓曲线,也能准确地获得所需要的运动规律。 A 尖顶式从动杆 B.滚子式从动杆 C. 平底式从动杆 9.()可使从动杆得到较大的行程。 A. 盘形凸轮机构 B 移动凸轮机构 C. 圆柱凸轮机构 10.()的摩擦阻力较小,传力能力大。 A 尖顶式从动杆 B. 滚子式从动杆 C 平底式从动杆 11.()的磨损较小,适用于没有内凹槽凸轮轮廓曲线的高速凸轮机构。 A. 尖顶式从动杆 B.滚子式从动杆 C. 平底式从动杆 12.计算凸轮机构从动杆行程的基础是()。 A 基圆 B. 转角 C 轮廓曲线 13.凸轮轮廓曲线上各点的压力角是()。 申请上海同济大学工程硕士学位论文 空间凸轮机构在汽车开关的应用 院系:机械与动力工程学院 工程领域:车辆工程 上海同济大学汽车学院 2013年8月 School of Mechanical Engineering Shanghai Jiaotong University Shanghai,P.R.China June, 2013 学位论文原创性声明 本人郑重声明:所呈交的学位论文,是本人在导师的指导下,独立进行研究工作所取得的成果。除文中已经注明引用的内容外,本论文不包含任何其它个人或集体已经发表或撰写过的作品成果。对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标明。本人完全意识到本声明的法律结果由本人承担。 学位论文作者签名: 日期:年月日 学位论文版权使用授权书 本学位论文作者完全了解学校有关保留、使用学位论文的规定,同意学校保留并向国家有关部门或机构送交论文的复印件和电子版,允许论文被查阅和借阅。本人授权上海交通大学可以将本学位论文的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。 保密□在年解密后适用本授权书。 本学位论文属于 不保密□。 (请在以上方框内打“√”) 学位论文作者签名:指导教师签名: 日期:年月日日期:年月日 空间凸轮机构在汽车线控换档开关的应用 摘要 碎着汽车电子技术的飞速发展,汽车上的电子装置越来越多。汽车的电子化、智能化、网络化也逐渐成为现代汽车发展的重要标志。今天,汽车电子技术已经成为汽车发展的技术支撑和汽车产品竞争力的关键。随着世界汽车工业尤其是汽车电子工业的飞速发展,在航空领域相当成熟的线控操纵技术也逐渐的在汽车领域得到了应用。以SBW(线控排挡)技术为代表的一系列X-By-Wire 技术正在成为各大OEM 角逐的竞技场。同时,伴随着节能减排、电动车、混合动力车等等环保节能理念的深入人心以及各大OEM 在这些领域的巨量投资,作为新能源汽车配套的线控技术,必然会迎来一个大发展的时期。SBW 是通过总线技术将换挡信号传送至执行机构同时接受执行反馈的一种换挡技术。 而控换档就是以机电系统代替传统的机械为连接换档杆和变速箱的传输控制信号。驻车(P),倒车档(R),空档(N)和前进档(D)之间的转换通过电子信号控制完成。线控换档系统由换挡选择模块、换档电控单元、换挡执行模块、停车控制ECU、停车执行机构和档位指示灯等组成。在该系统中,驾驶者通过换档杆的传感器将换档信号传递给电控单元,电控单元处理信号后将指令发给换档电机,实现前进档、倒档和空档的切换。其停车控制ECU会根据换挡选择模块的换挡指令,控制停车执行机构。 第六讲凸轮机构及其设计 (一)凸轮机构的应用和分类 一、凸轮机构 1.组成:凸轮,推杆,机架。 2.优点:只要适当地设计出凸轮的轮廓曲线,就可以使推杆得到各种预期的运动规律,而且机构简单紧凑。缺点:凸轮廓线与推杆之间为点、线接触,易磨损,所以凸轮机构多用在传力不大的场合。 二、凸轮机构的分类 1.按凸轮的形状分:盘形凸轮圆柱凸轮 2.按推杆的形状分 尖顶推杆:结构简单,能与复杂的凸轮轮廓保持接触,实现任意预期运动。易遭磨损,只适用于作用力不大和速度较低的场合 滚子推杆:滚动摩擦力小,承载力大,可用于传递较大的动力。不能与凹槽的凸轮轮廓时时处处保持接触。 平底推杆:不考虑摩擦时,凸轮对推杆的作用力与从动件平底垂直,受力平稳;易形成油膜,润滑好;效率高。不能与凹槽的凸轮轮廓时时处处保持接触。 3.按从动件的运动形式分(1)往复直线运动:直动推杆,又有对心和偏心式两种。(2)往复摆动运动:摆动推杆,也有对心和偏心式两种。 4.根据凸轮与推杆接触方法不同分: (1)力封闭的凸轮机构:通过其它外力(如重力,弹性力)使推杆始终与凸轮保持接触,(2)几何形状封闭的凸轮机构:利用凸轮或推杆的特殊几何结构使凸轮与推杆始终保持接触。①等宽凸轮机构②等径凸轮机构③共轭凸轮 (二)推杆的运动规律 一、基本名词:以凸轮的回转轴心O为圆心,以凸轮的最小半径r0为半径所作的圆称为凸轮的基圆,r0称为基圆半径。推程:当凸轮以角速度转动时,推杆被推到距凸轮转动中心最远的位置的过程称为推程。推杆上升的最大距离称为推杆的行程,相应的凸轮转角称为推程运动角。回程:推杆由最远位置回到起始位置的过程称为回程,对应的凸轮转角称为回程运动角。休止:推杆处于静止不动的阶段。推杆在最远处静止不动,对应的凸轮转角称为远休止角;推杆在最近处静止不动,对应的凸轮转角称为近休止角 二、推杆常用的运动规律 1.刚性冲击:推杆在运动开始和终止时,速度突变,加速度在理论上将出现瞬时的无穷大值,致使推杆产生非常大的惯性力,因而使凸轮受到极大冲击,这种冲击叫刚性冲击。 2.柔性冲击:加速度有突变,因而推杆的惯性力也将有突变,不过这一突变为有限值,因而引起有限 凸轮机构练习题 一、单项选择题(从给出的A、B、C、D中选一个答案) 1 与连杆机构相比,凸轮机构最大的缺点是。 A.惯性力难以平衡B.点、线接触,易磨损 C.设计较为复杂D.不能实现间歇运动 2 与其他机构相比,凸轮机构最大的优点是。 A.可实现各种预期的运动规律B.便于润滑 C.制造方便,易获得较高的精度D.从动件的行程可较大 3 盘形凸轮机构的压力角恒等于常数。 A.摆动尖顶推杆B.直动滚子推杆 C.摆动平底推杆D.摆动滚子推杆 4 对于直动推杆盘形凸轮机构来讲,在其他条件相同的情况下,偏置直动推杆与对心直动推杆相比,两者在推程段最大压力角的关系为关系。 A.偏置比对心大B.对心比偏置大 C.一样大D.不一定 5 下述几种运动规律中,既不会产生柔性冲击也不会产生刚性冲击,可用于高速场合。 A.等速运动规律B.摆线运动规律(正弦加速度运动规律) C.等加速等减速运动规律D.简谐运动规律(余弦加速度运动规律) 6 对心直动尖顶推杆盘形凸轮机构的推程压力角超过许用值时,可采用措施来解决。 A.增大基圆半径B.改用滚子推杆 C.改变凸轮转向D.改为偏置直动尖顶推杆 7.()从动杆的行程不能太大。 A. 盘形凸轮机构 B. 移动凸轮机构 C. 圆柱凸轮机构 8.()对于较复杂的凸轮轮廓曲线,也能准确地获得所需要的运动规律。 A 尖顶式从动杆 B.滚子式从动杆 C. 平底式从动杆 9.()可使从动杆得到较大的行程。 A. 盘形凸轮机构 B 移动凸轮机构 C. 圆柱凸轮机构 10.()的摩擦阻力较小,传力能力大。 A 尖顶式从动杆 B. 滚子式从动杆 C 平底式从动杆 11.()的磨损较小,适用于没有内凹槽凸轮轮廓曲线的高速凸轮机构。 A. 尖顶式从动杆 B.滚子式从动杆 C. 平底式从动杆 12.计算凸轮机构从动杆行程的基础是()。 A 基圆 B. 转角 C 轮廓曲线 13.凸轮轮廓曲线上各点的压力角是()。 第9章凸轮机构及其设计的重点知识 2.推杆的运动形式 基本概念:基圆、基圆半径、推程、行程、推程运动角、回程、回程运动角、休止、远 3.凸轮轮廓曲线设计 设计原理:反转法原理 设计方法: (1)画出基圆及基圆起始位置,取合适的坐标系; (2)根据反转法原理,求出推杆反转时角时的理论廓线方程式。 (3)根据几何关系求出实际廓线方程式。 4.主要参数的选择 ●压力角 从减少推杆和避免自锁的观点来看,压力角愈小愈好。 ●基圆半径 在满足压力角小于许用压力角的条件下,尽可能使基圆半径小些,以使凸轮机构的尺寸不至过大。在实际的设计工作中,还需考虑到凸轮机构的结构、受力、安装、强度等方面的要求。 ●滚子推杆滚子半径 为了避免凸轮廓线变尖和失真现象,滚子半径应小于理论廓线的最小曲率半径。设计时应尽量使滚子半径小些。但考虑到强度、结构等限制,通常按经验公式确定滚子半径,设计中验算理论廓线的最小曲率半径。 ●平度推杆平底尺寸 作图或计算得推杆平底中心至推杆平底与凸轮廓线的接触点间的最大距离后,利用经验公式计算平底的尺寸。另外,平底推杆凸轮机构有时也会产生失真现象。 凸轮机构的习题参考 1.设计一偏置移动滚子从动件盘形凸轮机构。已知凸轮以等角速度w顺时针转动,基圆半径r b=50mm,滚子半径r r=10mm, 凸轮轴心偏于从动件轴线右侧,偏距e=10mm.从动件运动规律如下:当凸轮转过120°时,从动件以简谐运动规律上升30mm;当凸轮接着转过30°时,从动件停歇不动;当凸轮再转过150°时,从动件以等加速减速运动返回原处;当凸轮转过一周中其余角度时,从动件又停歇不动。 2.在图3.13所示的凸轮机构中,已知摆杆AB在起始位置时垂直于OB,l OB=40mm, l AB=80mm,滚子半径r r=10mm,凸轮以等角速度w顺时针转动。从动件运动规律如下:当凸 机械设计专升本章节练习题含答案——凸轮机构 第5章凸轮机构 1.从动件的运动规律:等速,等加速等 减速,余弦加速度,正弦加速度 2.动力特性:刚性冲击,柔性冲击 3.设计原理:反转法,比例尺,等分 基圆,偏置从动件压力角与自锁条件 4.基本参数:基圆半径,滚子半径, 平底尺寸 【思考题】 5-1 凸轮机构的应用场合是什么?凸轮机构的组成是什么?一般见什么办法保证凸轮与 从动件之间的接触? 5-2 凸轮机构分成哪几类?凸轮机构有什么特点? 5-3 为什么滚子从动件是最常见的从动件型式? 5-4 凸轮机构从动件的常见运动规律有那些? 各有什么特点? 5-5 图解法绘制凸轮轮廓的原理是什么?为什么要采用这种原理? 5-6 什么情况下要用解析法设计凸轮的轮廓? 5-7 设计凸轮应注意那些问题? 5-8 从现有的机器上找出两个凸轮机构应用实例,分析其类型和运动规律? A级能力训练题 1.在凸轮机构的几种基本的从动件运动规律中, 运动规律使凸轮机构产生刚性冲击,运动规律产生柔性冲击,运动规律则没有冲击。 2.在凸轮机构的各种常见的推杆运动规律中, 只宜用于低速的情况,宜用于中速,但不宜用于高速的情况,而可在高速下应用。 3.设计滚子推杆盘形凸轮轮廓线时,若发现凸轮 轮廓线有变尖现象,则在尺寸参数的改变上应采取的措施是或。 4.移动从动件盘形凸轮机构,当从动件运动规律 一定时,欲同时降低升程的压力角,可采用的措施是。若只降低升程的压力角,可采用方法。 5.凸轮的基圆半径是从到的最短 距离。 6.设计直动滚子推杆盘形凸轮机构的工作廓线 时,发现压力角超过了许用值,且廓线出现变尖现象,此时应采用的措施是_______________________________________ 一、填空 1.凸轮机构主要是由_凸轮_、_从动件_和固定机架三个基本构件所组成。 2.按凸轮的外形,凸轮机构主要分为_盘形__凸轮和_柱体_凸轮两种基本类型。 3.从动杆与凸轮轮廓的接触形式有_尖顶_、_滚子_和平底三种。 4.以凸轮最小半径r0所作的圆称之为基圆,r0称为凸轮的基圆半径 7.凸轮机构从动杆等速运动的位移为一条__斜直线__线。 10、在凸轮机构一个运动循环中,从动件重复升、停、降、停的过程。 11、在等速度运动图中,位移和转角成正比关系,其图线为一条直线。 12、从动件的上升或下降运动速度v为常数时的运动规律,称为匀速运动规律。 13、凸轮机构在远休行程中,凸轮所对应的转角称之为远休角用字母表示。 14、平底式从动杆与凸轮的接触面较大,易于形成油膜,所以润滑较好,摩擦较小,常用于没有凹形曲线的凸轮上作高速传动 二、选择 10.凸轮机构的移动式从动杆能实现_c______。 a 匀速、平稳的直线运动 b 简偕直线运动c各种复杂形式的直线运动 11.凸轮与从动件接触处的运动副属于__a_____。 a 高副 b 转动副 c 移动副 12. 要使常用凸轮机构正常工作,必须以凸轮__c_____。 a 作从动件并匀速转动 b 作主动件并变速转动 c 作主动件并匀速转动 13.在要求__a_____的凸轮机构中,宜使用滚子式从动件。 a 传力较大 b 传动准确、灵敏 c 转速较高 凸轮机构从动件作等速规律运动时会产生__a__冲击。 A. 刚性 B. 柔性 C. 刚性和柔性 14、__a__对于较复杂轮廓曲线的凸轮,也能准确地获得所需的运动规律。 A. 尖顶式从动件 B. 滚子式从动件 C. 平底式从动件 三、判断 1.凸轮机构广泛用于自动化机械中。( 对) 2.圆柱凸轮机构中,凸轮与从动杆在同一平面或相互平行的平面内运动。( 错) 3.平底从动杆不能用于具有内凹槽曲线的凸轮。(对) 4.凸轮机构从动件的运动规律是可按要求任意拟订的。(对)5.凸轮在机构中经常是主动件。( 对 ) 7.从动件的运动规律就是凸轮机构的工作目的。( 对 ) 8.凸轮机构也能很好的完成从动件的间歇运动。( 对 ) 四,已知基圆半径为20mm的盘形凸轮,逆时针转90。时,通过凸轮轴心的滚子直径为8mm的滚子从动杆等速上升30mm,停歇180。后,凸轮继续转动,转过90。,从动件又等速下降30mm,试画出从动件的位移运动曲线。 凸轮机构习题 一、填空题 1)凸轮机构从动件按余弦加速度规律运动时,在运动开始和终止的位置,加速度有突变,会产生柔性冲击。 2)根据从动件凸轮廓线保持接触方法的不同,凸轮机构可分为力封闭和几何形状封闭两大类型。写出两种几何形状封闭的凸轮机构槽道凸轮和等径凸轮。 3)为了使凸轮廓面与从动件底面始终保持接触,可以利用从动件自身的重力,弹簧力,或依靠凸轮上的几何形状来实现。 4)凸轮机构的主要优点为只要适当地设计出凸轮廓线,就可以是从动件可以各种预期的运动规律。主要缺点为从动件与凸轮之间是高副(点接触、线接触),易磨损,所以凸轮机构多用在传力不大的场合。 5)为减小凸轮机构的推程压力角,可将从动杆由对心改为偏置,正确的偏置方向是将从动杆偏在凸轮转动中心的正偏置侧。 6)凸轮机构的从动件按等加速等减速运动规律运动,在运动过程中,加速度将发生突变,从而引起柔性冲击。 7)当凸轮机构的最大压力角超过许用压力角时,可采取以下措施来减小压力角增大基圆半径、改变偏置方向。 9)平底垂直于导路的直动杆盘形凸轮机构,其压力角等于 0 。 10)在凸轮机构推杆的四种常用运动规律中,等速运动运动规律有刚性冲击;等加速等减速、余弦加速度运动规律有柔性冲击;正弦加速度运动规律无冲击。 11)凸轮机构推杆运动规律的选择原则为首先要满足机器的工作要求,同时还应使机器具有良好的动力特性和使所设计的凸轮便于加工。 12)设计滚子推杆盘形凸轮机构凸轮廓线时,若发现工作廓线有变尖现象时,则尺寸参数上应采取的措施是适当增大基圆半径或适当减小滚子半径。 二、选择题及简答 1)滚子从动件盘形凸轮的理论廓线和实际廓线之间的关系为(d) a)两条廓线相似b)两条廓线相同 c)两条廓线之间的径向距离相等d)两条廓线之间的法向距离相等 2)何谓凸轮机构的压力角?其在凸轮机构的设计中有何重要意义?一般是怎样处理的? 3)设计直动推杆盘形凸轮机构时,在推杆运动规律不变的条件下,要减小推程压力角,可采用哪两种措施? 空间凸轮精密测量及数字化逆向工程关键技术的研究 摘要 本文以空间凸轮为研究对象,从工程实际出发,以三坐标测量机和计算 机运动仿真技术为工具,对空间凸轮的精密测量方法、从动件的运动规律反 求方法及廓面误差检测方法进行了较深入的理论分析和实验研究。 对空间凸轮机构及其运动规律进行了分析和研究。介绍了空间凸轮机构 的常用类型、空间凸轮轮廓设计、压力角简化算法及常用运动规律。为空间 凸轮的精密测量、从动件运动规律反求及误差检测研究奠定了基础。 重点研究了空间凸轮的精密测量问题。提出了一种空间凸轮快速、精密 测量方法及测球半径补偿方法,系统地论述了该测量方法的原理,给出了测 球半径补偿的数学表达式,并基于WinMeil平台编制了可实现实时测球半 补偿的空间凸轮专用测量程序。解决了空间凸轮快速、精密测量的难题,为 空间凸轮机构从动件运动规律的反求及轮廓误差检测奠定了基础。 详细探讨了空间凸轮机构从动件运动规律反求问题。提出了一种基于计 算机运动仿真的运动规律反求方法,并详细探讨了该方法的理论基础,推导 出了从动件运动规律的数学表达式。计算机仿真技术的高效性与精确性保证 了本方法能够实现空间凸轮机构从动件运动规律的快速、准确反求。该方法 的提出为空间凸轮机构从动件运动规律的反求设计提供了新思路,同时也为 其它机构的正向与逆向设计指明了新方向与新方法。 系统分析了空间凸轮轮廓误差检测问题。以空间凸轮的精密测量为基 础,提出了一种简单实用的空问凸轮轮廓误差检测方法,并讨论了数据匹配 问题。最后,以此作为理论基础,采用Visual c++6.0作为开发工具,编制 _『空间凸轮轮廓面加工误差检测软件。 基于上述空间凸轮精密测量方法、运动规律反求方法及轮廓面误差检测 方法的研究结论,分别进行了实验验证及分析。实验结果表明,上述方法正 确可行。证明了本文所提出的理论及方法的正确性,具有重要的理论意义和 实际应用价值。 关键词:空间凸轮,精密测量,运动仿真,运动规律,反求设计,误差检测RESEARCH oN THE KEY TECHNIQUES FoR EXACT MEASUREMENT AND DIGITAL REVERS ENGINEERING oF SPA TIAL CAMS ABSTRACT Focusing on the spatial cams,the dissertation,starting with the practica processing,analyzes and experiments research the precision measuremen for spatial cams,the reverse design of follower motion specifications and contou error inspection of spatial cams deeply by coordinate measure machine and emulation. The spatial cam mechanisms and their motion speciation are analyzed and studied intensively.The commonly used spatial earn mechanisms,the design of spatial cam contours,the simplified algorithm of pressure angle and common used motion speciation are presented.The groundwork isestablished for the study of the precision measurement for spatial cams,the reverse design of follower motion specifications and the error inspection of spatial cams. The exact measurement method for spatial cams isstudied intensivel 习 题 6-6 在摆动从动件盘形凸轮机构中,从动件行程角max 30o ψ=,0120o Φ=,'0120o Φ=, 从动件推程、回程分别采用等加速等减速和正弦加速度运动规律,试写出摆动从动件在各行程的位移方程式。 解:(1)推程的位移方程式为 ()2 0max 02max 0max 00202 022 2?ψψ?ψψψ?????Φ?=??≤≤ ? Φ???? Φ? =-Φ-≤≤Φ?Φ? 代入数值得 ()2220230 060120240130-120 60120240o o o o o o o o o ??ψ?ψ?????=??=≤≤? ????? ?=?-≤≤?? (2)回程的位移方程式为 ()max 0''0001 21sin 3602o s s T T T πψψ?π ??????=?-+ Φ+Φ≤≤??? ?ΦΦ?????? =-Φ+Φ? 代入数值得: o 2401360360301sin 240120212012024030 30sin 3 24036042o o o o o o o o o o o o ?ψ?π???π ????-=?-+-??? ???? ?-=-+≤≤ 6-7 图中所示为从动件在推程的部分运动曲线,其0o s Φ≠,'0o s Φ≠,试根据s 、v 和a 之 间的关系定性的补全该运动曲线,并指出该凸轮机构工作时,何处有刚性冲击?何处有柔性冲击? 解:如图所示。 (1)AB段的位移线图为一条倾斜直线,因此,在这一段应为等速运动规律,速度线图为一条水平直线,其加速度为零。 (2)BC段的加速度线图为一条水平直线。因此,在这一段应为等加速运动规律,其速度线图为一条倾斜的直线,位移线图为一条下凹的二次曲线。 (3)CD段的速度线图为一条倾斜下降的斜直线。因此,在这一段应为等减速运动规律,其加速度线图为一条水平直线,位移线图为一条上凸的二次曲线。 该凸轮在工作时,在A处有刚性冲击,B、C、D处有柔性冲击。 6-8 对于图中的凸轮机构,要求: 1)写出该凸轮机构的名称; 2)在图上标出凸轮的合理转向; 3)画出凸轮的基圆; 4)画出从升程开始到图示位置时推杆的位移s,相对应的凸轮转角?,B点的压力角α;5)画出推杆的行程H。 解:1)偏置直动滚子推杆盘形凸轮机构。 2)为使推程压力角较小,凸轮应该顺时针转动。 凸轮机构 一、填空 1.凸轮机构主要是由_______、_______和固定机架三个基本构件所组成。 2.按凸轮的外形,凸轮机构主要分为_______凸轮和_______凸轮两种基本类型。 3.从动杆与凸轮轮廓的接触形式有_______、_______和平底三种。 4.以凸轮的理论轮廓曲线的最小半径所做的圆称为凸轮的_______。 5.凸轮理论轮廓曲线上的点的某点的法线方向(即从动杆的受力方向)与从动杆速度方向之间的夹角称为凸轮在该点的_______。 6.随着凸轮压力角α增大,有害分力F2将会_______而使从动杆自锁“卡死”,通常对移动式从动杆,推程时限制压力角α_______。 7.凸轮机构从动杆等速运动的位移为一条_______线,从动杆等加速等减速运动的位移曲线为一条_______线。 8.等速运动凸轮在速度换接处从动杆将产生_______冲击,引起机构强烈的振动。 9.凸轮机构的移动式从动杆能实现_______。 (a 匀速、平稳的直线运动 b 简偕直线运动 c各种复杂形式的直线运动 10.从动杆的端部形状有_______、_______和平底三种。 11.凸轮与从动件接触处的运动副属于_______。 (a 高副 b 转动副 c 移动副) 12. 要使常用凸轮机构正常工作,必须以凸轮_______。 ( a 作从动件并匀速转动 b 作主动件并变速转动 c 作主动件并匀速转动)13.在要求_______的凸轮机构中,宜使用滚子式从动件。 ( a 传力较大 b 传动准确、灵敏 c 转速较高) 14.使用滚子式从动杆的凸轮机构,为避免运动规律失真,滚子半径r与凸轮理论轮廓曲线外凸部分最小曲率半径ρ最小之间应满足_______。 凸轮机构综合练习题 一、填空题 1.在凸轮机构的几种基本的从动件运动规律中,_________运动规律使凸轮机构产生刚性冲击,___________________运动规律产生柔性冲击,________________运动规律则没有冲击。 2.在凸轮机构的各种常用的推杆运动规律中,_____________只宜用于低速的情况,__________宜用于中速,但不宜用于高速的情况;而______________可在高速下应用。 3.设计滚子推杆盘形凸轮机构的凸轮廓线时,若发现凸轮廓线有变尖现象,则在尺寸参数的改变上应采用的措施是_______________或___________________。 4.凸轮的基圆半径是从______到_______的最短距离。 5.滚子移动从动件盘状凸轮,它的实际廓线是理论廓线的________曲线。 6.维持凸轮与从动杆高副接触封闭的方法有_________、__________。 7.凸轮的基圆半径越小,则凸轮机构的压力角越_____,而凸轮机构的尺寸越______。 8.设计凸轮机构,若量得其中某点的压力角超过许用值,可以用__________________的方法使最大压力角减小。 9.移动从动件盘形凸轮机构,当从动件运动规律一定时,欲同时降低升程和回程的压力角,可采用的措施是_______________。若只降低升程的压力角,可采用____________的方法。 10.写出两种既无刚性冲击、又无柔性冲击的运动规律_____________________、 __________。 11.凸轮轮廓的形状是由________________决定的。 12.平底垂直于导路的直动推杆盘形凸轮机构中,其压力角等于___________。 13.在设计直动滚子推杆盘形凸轮机构的工作廓线时,发现压力角超过了许用值,且廓线出现变尖现象,此时应用采用的措施是。 14.凸轮机构中的压力角是和所夹的锐角。 15.设计滚子从动件盘形凸轮机构时,滚子中心的轨迹称为凸轮的廓线;与滚子相包络的凸轮廓线称为廓线。 16. 用作图法绘制直动从动件盘形凸轮廓线时,常采用法。即假设凸轮,从动件作的复合运动。 二、选择题 1.当凸轮机构的从动件推程按等加速等减速规律运动时,在推程开始和结束位置存在。 A.存在刚性冲击; B.存在柔性冲击; C.不存在冲击。 2.为使凸轮机构的结构紧凑和受力条件好,设计时应满足。 A.α≤[α], r b≥[r b]; B.α>[α], r b<[r b] ; C.α≤[α], r b<[r b]; D. α>[α], r b>[r b]。 3.若增大凸轮机构的推程压力角α,则该凸轮机构的凸轮基圆半径将,从动件上所受有害分力将。 A.增大; B. 减小; C. 不变。 4.设计凸轮廓线时,若减小凸轮的基圆半径,则廓线曲率半径将。 A.变大; B. 变小; C. 不变。凸轮机构练习题
凸轮机构习题解答复习与练习题参考答案
第9章凸轮机构及其设计(有答案)
凸轮机构及其设计习题解答
第九章凸轮机构及其设计
第三章 配 气 机 构 习题二答案
凸轮机构习题解答
空间凸轮机构在汽车开关的应用
机械原理 凸轮机构及其设计
凸轮机构练习题
第9章凸轮机构习题解答
机械设计专升本章节练习题含答案——凸轮机构
凸轮习题答案
凸轮机构习题
空间凸轮精密测量及数字化逆向工程关键技术的研究
第6章凸轮--习题及答案(全)
机械基础中凸轮机构练习题资料
凸轮机构综合练习题
相关主题
文本预览