图片简介:
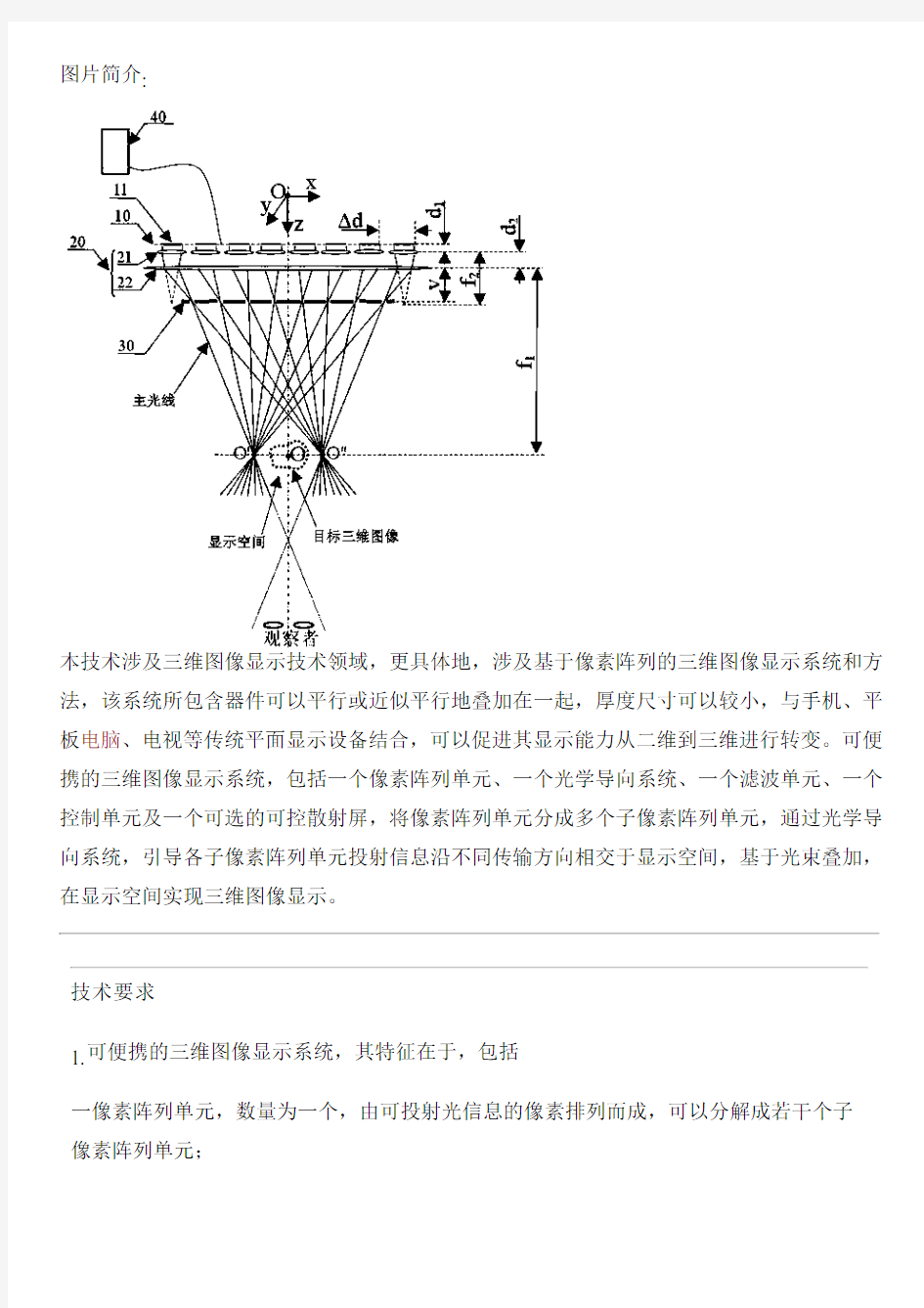
本技术涉及三维图像显示技术领域,更具体地,涉及基于像素阵列的三维图像显示系统和方法,该系统所包含器件可以平行或近似平行地叠加在一起,厚度尺寸可以较小,与手机、平板电脑、电视等传统平面显示设备结合,可以促进其显示能力从二维到三维进行转变。可便携的三维图像显示系统,包括一个像素阵列单元、一个光学导向系统、一个滤波单元、一个控制单元及一个可选的可控散射屏,将像素阵列单元分成多个子像素阵列单元,通过光学导向系统,引导各子像素阵列单元投射信息沿不同传输方向相交于显示空间,基于光束叠加,在显示空间实现三维图像显示。
技术要求
1.可便携的三维图像显示系统,其特征在于,包括
一像素阵列单元,数量为一个,由可投射光信息的像素排列而成,可以分解成若干个子
像素阵列单元;
一光学导向系统,数量为一个,调制上述像素阵列单元投射的光信息,将上述各子像素阵列单元投射的主光线会聚于不同空间位置,形成会聚光点阵列,并引导从上述各会聚光点出射的主光线沿不同传输方向投射至显示区域;
一滤波单元,数量为一个,置于上述像素阵列单元投射光信息的传输路径中,对上述子像素阵列单元投射的光信息进行空间滤波,获取窄带宽的子像素阵列单元投影信息;
一控制单元,数量为一个,由虚置目标图像,经主光线的反向追踪,获取像素阵列单元各像素需要显示的信息,并在系统工作时控制像素阵列单元各像素投射对应信息;
所述光学导向系统为棱镜阵列、小透镜阵列和转换透镜的组合,各子像素阵列单元投影信息经棱镜阵列中对应棱镜折射后,经小透镜阵列中对应小透镜和转换透镜会聚并引导会聚光点出射的主光线沿不同传输方向投射至显示区域。
2.根据权利要求1所述的可便携的三维图像显示系统,其特征在于,像素阵列单元由多个显示芯片拼接而成,各显示芯片即为相应的子像素阵列单元;该显示芯片是OLED微显示芯片或LED微显示芯片或透射式液晶微显示芯片。
3.根据权利要求1所述的可便携的三维图像显示系统,其特征在于,像素阵列单元为单个显示芯片,各子像素阵列单元分别为该单个显示芯片的一部分。
4.根据权利要求1所述的可便携的三维图像显示系统,其特征在于,像素阵列单元的像素是主动发光的像素或是被动发光的像素,像素阵列单元的像素是被动发光的像素时像素阵列单元包含有对应背光源。
5.根据权利要求1所述的可便携的三维图像显示系统,其特征在于,滤波单元由具有一定孔径的小孔组合而成,各小孔处于上述光学导向系统产生各会聚光点处,滤除上述各子像素阵列单元投射光信息的高频信息,保留各子像素阵列单元投射信息的低频部分通过。
6.根据权利要求1所述的可便携的三维图像显示系统,其特征在于,还包括可控散射屏,数量为一个,以在该三维显示系统中实现二维图像的显示,使系统同时具备三维显示和二维显示两种功能模式:三维显示模式下,该可控散射屏可以从光路中撤出或无散射地让上述像素阵列单元投射的光场通过,使系统三维显示的功能不受该可控显示屏的影响;二维显示模式下,该可控散射屏进入光路进行散射或可控地由非散射状态转换为散射状态,并以其散射面为二维显示区域进行二维图像显示。
7.根据权利要求1所述的可便携的三维图像显示系统,其特征在于,光学导向系统不包含转换透镜,各子像素阵列单元投影信息经对应棱镜折射,沿不同传输方向进入对应小透镜,会聚并经滤波单元的低通滤波,沿不同传输方向投射至显示区域。
8.根据权利要求1所述的可便携的三维图像显示系统,其特征在于,光学导向系统的棱镜阵列由光栅器件或其它光偏转器件代替,其功能就是使不同子像素阵列单元投射的主光线具有不同的偏转角度。
9.三维图像显示方法,其特征在于可应用于权利要求1至8任一所述可便携的三维图像显示系统,以及在需要时实现三维显示模式和二维显示模式的转换,包括以下步骤:
S1.建立xyz轴坐标,在三维显示模式下,虚拟放置目标三维图像于以坐标系原点为中心的显示区域内,若系统引入了可选散射屏,需要关闭其散射功能;
S2.以虚置目标三维图像为源,基于光线追踪,根据各像素投射主光线经目标图像时所过各虚置物点的光强值,获取各像素所需投影信息;控制像素阵列单元投影所获取信息,在显示区域光线叠加复现目标三维图像光场,实现真实空间内的三维显示;
S3.置入了可控散射屏的系统在二维显示模式下,需激活二维散射屏的散射功能,并以该可控散射屏的散射面为二维显示区域;
S4.虚置目标二维图像于可控散射屏上,基于光线追踪,根据各像素投射主光线经虚置二维图像时所过各点的光强值,获取各像素需投影的信息;控制像素阵列单元投影所获取信息,在可控散射屏上散射显示目标二维图像。
技术说明书
可便携的三维图像显示系统和方法
技术领域
本技术涉及三维图像显示技术领域,更具体地,涉及系统厚度可以控制到较小尺寸的三维图像显示系统和方法。
背景技术
由于二维显示难以清楚准确表达第三维的深度信息,人们一直在致力于研究可显示立体场景的显示技术——三维图像显示技术。现有的各种三维显示技术,要么需要眼镜等辅助设备,要么系统的结构比较复杂,不适于三维技术在手机等便携式移动设备上的应用。本专利基于可叠加的几个面分布或近似面分布的器件阵列,通过设计简单的光学导向系统,实现投射光场的空间叠加,获得真实的三维图像显示。
由于系统结构简单,沿厚度方向其尺寸可以控制在较小范围,有可能将该专利技术结合到现有的手机、平板电脑等便携式设备上,在这些生活必需品上实现三维显示,推动三维技术真正走到人们的日常生活中来。
技术内容
本技术为实现结构简单、尺寸小巧的三维显示设备,提供可便携的三维图像显示系统和方法,其采用分辨率较高的像素阵列,通过光学导向系统的控制,将沿不同方向传输的各子像素阵列投影的光信息在空间进行叠加,实现显示区域内真实三维图像的显示,并根据需要,能可选地实现三维显示模式和二维显示模式间的切换。
为解决上述技术问题,本技术采用的技术方案是:可便携的三维图像显示系统,其中包括
一像素阵列单元,数量为一个,由可投射光信息的像素排列而成,可以分解成若干个子像素阵列单元;
一光学导向系统,数量为一个,调制上述像素阵列单元投射的光信息,将上述各子像素阵列单元投射的主光线会聚于不同空间位置,形成会聚光点阵列,并引导从上述各会聚光点出射的主光线沿不同传输方向投射至显示区域;
一滤波单元,数量为一个,置于上述像素阵列单元投射光信息的传输路径中,对上述子像素阵列单元投射的光信息进行空间滤波,获取窄带宽的子像素阵列单元投影信息;
一控制单元,数量为一个,由虚置目标图像,经主光线的反向追踪,获取像素阵列单元各像素需要显示的信息,并在系统工作时控制像素阵列单元各像素投射对应信息;
进一步的,所述的像素阵列单元可以由多个显示芯片拼接而成,各显示芯片即为相应的子像素阵列单元;该显示芯片可以是OLED微显示芯片、LED微显示芯片或透射式液晶微显示芯片等
进一步的,所述的像素阵列单元可以为单个显示芯片,各子像素阵列单元分别为该单个显示芯片的一部分;
进一步的,所述的像素阵列单元的像素可以是主动发光的像素,也可以是被动发光的像素,若为后者,像素阵列单元包含有对应背光源;
进一步的,所述的光学导向系统可以为小透镜阵列和转换透镜的组合,各子像素阵列单元投影信息经小透镜阵列中对应小透镜和转换透镜的依次调制,会聚成空间排列的光点阵列,且各会聚光点投射的主光线沿不同方向投射至显示区域;
进一步的,所述的系统,其中光学导向系统可以为小透镜阵列和转换透镜的组合,各子像素阵列单元投影信息经小透镜阵列中对应小透镜会聚成空间排列的光点阵列,各会聚光点投射的主光线再经转换透镜,沿不同传输方向投射至显示区域;
进一步的,所述的系统,可以可选地引入可控散射屏,数量为一个,以在该三维显示系统中实现二维图像的显示,使系统同时具备三维显示和二维显示两种功能模式:三维显示模式下,该可控散射屏可以从光路中撤出或无散射地让上述像素阵列单元投射的光场通过,使系统三维显示的功能不受该可控显示屏的影响;二维显示模式下,该可控散射屏进入光路进行散射或可控地由非散射状态转换为散射状态,并以其散射面为二维显示区域进行二维图像显示;
进一步的,所述的光学导向系统可以为棱镜阵列、小透镜阵列和转换透镜的组合,各子像素阵列单元投影信息经棱镜阵列中对应棱镜折射后,经小透镜阵列中对应小透镜和转换透镜会聚并引导会聚光点出射的主光线沿不同传输方向投射至显示区域;
进一步的,所述的光学导向系统也可以不包含转换透镜,各子像素阵列单元投影信息经对应棱镜折射,沿不同传输方向进入对应小透镜,会聚并经滤波单元的低通滤波,沿不同传输方向投射至像显示区域;
进一步的,所述的光学导向系统的棱镜阵列也可以由光栅器件或其它光偏转器件代替,其功能就是使不同子像素阵列单元投射的主光线具有不同的偏转角度。
进一步的,所述的光学导向系统可以为曲面分布的小透镜阵列,其中像素阵列单元、小透镜阵列、和滤波单元绕相同的球心分布于三个不同半径的圆球面上,各子像素阵列单元投影信息经小透镜阵列中对应小透镜会聚于滤波单元,低通滤波后,各子像素阵列单元投射的主光束导向显示区域;
进一步的,所述的滤波单元由具有一定孔径的小孔组合而成,各小孔处于上述光学导向系统产生各会聚光点处,滤除上述各子像素阵列单元投射光信息的高频信息,保留各子像素阵列单元投射信息的低频部分通过;
三维图像显示方法,包括以下步骤:
S1.建立xyz轴坐标,在三维显示模式下,虚拟放置目标三维图像于以坐标系原点为中心的显示区域内,若系统引入了可选散射屏,需要关闭其散射功能;
S2.以虚置目标三维图像为源,基于光线追踪,根据各像素投射主光线经目标图像时所过各虚置物点的光强值,获取各像素所需投影信息;控制像素阵列单元投影所获取信息,在显示区域光线叠加复现目标三维图像光场,实现真实空间内的三维显示;
S3.置入了可控散射屏的系统在二维显示模式下,需激活二维散射屏的散射功能,并以该可控散射屏的散射面为二维显示区域;
S4.虚置目标二维图像于可控散射屏上,基于光线追踪,根据各像素投射主光线经虚置二维图像时所过各点的光强值,获取各像素需投影的信息;控制像素阵列单元投影所获取信息,在可控散射屏上散射显示目标二维图像。
与现有技术相比,有益效果是:本技术通过现有平板显示技术可以提供的多个子像素阵列单元的拼接,获取大分辨率的像素阵列单元,比如OLED微显示芯片的组合,通过光学导向系统和低通滤波,空间叠加这些子像素阵列单元投影的光场,生成分布于三维空间的真实三维图像。由于可以控制光学导向系统的几何尺寸,该技术可以和现有平板显示技术结合,在手机、Ipad等普及的电子设备上实现双目可视的真三维图像显示,推动三维显示技术在实用化领域的发展。
附图说明
图1是本技术实施例1可便携的三维图像显示系统光路示意图。
图2是本技术实施例1可便携的三维图像显示系统结构示意图。
图3是本技术实施例1可便携的三维图像显示系统工作原理分析图。
图4是本技术实施例2可便携的三维图像显示系统光路示意图。
图5是本技术实施例3引入了可控散射屏的可便携的三维图像显示系统二维图像显示示意图。
图6是本技术实施例4可便携的三维图像显示系统示意图
图7是本技术实施例5采用曲面像素阵列单元的可便携的三维图像显示系统示意图
10:像素阵列单元11:子像素阵列单元
20:光学导向系统21:小透镜阵列
22:转换透镜23:棱镜阵列
30:滤波单元40:控制单元
50:可控散射屏
具体实施方式
附图仅用于示例性说明,不能理解为对本专利的限制;为了更好说明本实施例,附图某些部件会有省略、放大或缩小,并不代表实际产品的尺寸;对于本领域技术人员来说,附图中某些公知结构及其说明可能省略是可以理解的。本技术采用高分辨率的像素阵列,通过其投影图像传输方向的引导,以结构简单、尺寸小巧的系统结构实现真实三维图像显示。
实施例1
可便携的三维图像显示系统,采用小透镜阵列21和转换透镜22组合而成光学导向系统20的三维图像显示系统光路结构如图1所示:像素阵列单元10由平面矩形排列的M×N个OLED微显示芯片组成(沿x向以M=8为例),每个该OLED微显示芯片即为本专利中的子像素阵列单元11,其分辨率为m×n,像素间距为δd,沿矩形边线方向上相邻子像素阵列单元11的间距为Δd。系统滤波单元30由具有一定通光孔径的M×N个小孔组合而成。图2为该系统的系统结构示意图(以M×N=4×4为例)。平面分布的小透镜阵列21距离像素阵列单元10距离为d1,该小透镜的焦距为f2。经对应小透镜和转换透镜22,各子像素阵列单元11投射的主光线会聚于滤波单元30上的对应小孔处。这里的主光线,即通常意义上像素沿像素所在平面垂向上发出的光线,若是平面显示芯片,即是垂直于芯片面投射出来的直射光线,此解释在下面各实施例中通用。滤波单元30的小孔、小透镜阵列21的小透镜和M×N个OLED微显示芯片采用相同的排列结构。经小孔的低通滤波,窄带宽的子像素阵列单元投影信息从对应小孔投射向O点附近的显示区域。显示区域中心O和转换透镜22的中心焦点重合。转换透镜22焦距为f1,它和小透镜阵列21的距离为d2,和滤波单元的距离为v。
为了让图示更清晰,我们在xz平面内沿x方向以m=5为例来说明系统的工作原理,如图3,其中只画出了一个子像素阵列11和其对应的小透镜。当然,实际上OLED微显示芯片x向的分辨率m远远大于5。从子像素阵列11的5个像素点P1、P2、P3、P4和P5投射出的主光线经小透镜和变换透镜22汇聚于滤波单元30的小孔1处,经其有限的通光孔径,以零频为中心频率的窄带宽信息被导向显示空间,对应的5条主光线分别过O'、O2、O3、O4和O"五个基点。对任意像素点,比如P2,连接小孔1中心点和对应基点O2的直线,该直线和虚置目标三维图像相交各物点光强值的和即为该像素P2在系统工作时需要投影的光强值。采用同样方法,控制单元40可以获取二维分布的像素阵列10上所有像素需要投射的光强值,也即是像素阵列10的投影信息。系统工作时,控制单元40控制像素阵列10投影已经获取的投影信息,实现三维图像的显示。对任意显示物点,该点由通过M×N个小孔传输过来的M×N条主光线会聚而成,且相邻两条主光线的夹角由相邻小孔间距和(f1-v)比值的反正弦函数值确定。合理确定系统参数,该夹角值可以很小,可以保证显示的三维图像具有连续的运动视差,实现真实意义上的三维图像显示。由几何关系,可以确定观察者可以看到整个显示物体的区域为图1中观察者所处的角范围内。
实施例2
可便携的三维图像显示系统,采用小透镜阵列21和转换透镜22组合而成光学导向系统20的三维图像显示系统光路结构如图4所示:像素阵列单元10由平面矩形排列的M×N个矩形OLED微显示芯片拼接而成(这里以沿x向M=8为例),每个该OLED微显示芯片即为本专利中的子像素阵列单元11,其分辨率为m×n,沿矩形边线方向上相邻子像素阵列单元11的间距为Δd。系统滤波单元30由具有一定孔径的M×N个小孔组合而成。平面分布的小透镜阵列21距离像素阵列10距离为d1,该小透镜的焦距为f2。经对应小透镜,各子像素阵列单元11的主光线会聚于滤波单元30上的对应小孔处。滤波单元30的小孔、小透镜阵列21的小透镜和M×N个OLED微显示芯片采用相同的排列结构。经小孔滤波,子像素阵列单元11投影信息再经转换透镜22导向点O'和O"间的显示区域。显示区域中心O位于转换透镜22的焦点上。转换透镜22焦距为f1,它和小透镜阵列21的距离为d2。该实施例和实施例1原理相同,只是光学器件的位置设计有所不同,系统的工作原理和方法解释可参考实施例1。
实施例3
引入可控散射屏50的可便携的三维图像显示系统,采用小透镜阵列21和转换透镜22组合而成光学导向系统20的三维图像显示系统如图5:像素阵列单元10由M×N个OLED微显示芯片(这里以只画出一个)组成,该OLED微显示芯片即为本专利的子像素阵列单元11,其分辨率为m×n。系统滤波单元30由具有一定通光孔径的M×N个小孔组合而成。经对应小透镜和转换透镜22,各子像素阵列单元11投射的主光线会聚于滤波单元30上的对应小孔处。滤波单元30的小孔、小透镜阵列21的小透镜和M×N个OLED微显示芯片采用相同的排列结构。经小孔低通滤波,子像素阵列单元11投影信息从对应小孔投射向激活的可控散射屏50。可控散射屏50距离滤波单元距离为D,该D值要保证从各小孔投射出来的主光线在二维散射面上无间隙地覆盖可控散射屏。
为了让图示更清晰,我们在y垂面内沿x方向以m=5为例来说明系统的工作原理,如图5,其中只画出了一个子像素阵列11和一个小透镜。当然,实际上OLED微显示芯片的分辨率远远大于5。从子像素阵列11的5个像素点P1、P2、P3、P4和P5投射出的主光线经小透镜和变换透镜22汇聚于滤波单元30的小孔1处,经小孔1有限通光孔径的低通滤波,获得的以基频为中心频率的窄带宽信息被导向可控散射屏,对应的5条主光线分别过达到可控散射屏50上的Q1、Q2、Q3、Q4和Q5五个基点。虚置目标二维图像于可控散射屏50的散射面上。对任意像素点,比如P2,其投射主光线与可控散射屏50交点Q2处虚置二维图像像点的强度,即为系统在进行二维显示时像素P2需要投影的光强值。同理,控制单元40可以获取像素阵列单元10上所有像素的投影光强值,也即是像素阵列10的投影信息。系统工作于二维显示模式时,激活可控散射屏50的散射功能,控制单元40控制像素阵列单元10投射已经获取的投影信息,实现二维图像在可控散射屏50散射面上的显示。散射的主光线使显示的二维图像在较大视角范围内可视,实现系统从三维显示向二维显示的转换。此时,三维显示系统同时具有二维显示的功能,但,由于可控散射屏50的引入,显示系统沿z像厚度增加了D。
实施例4
可便携的三维图像显示系统,采用棱镜阵列23、小透镜阵列21和转换透镜22组合而成的光学导向系统20的三维图像显示系统光学结构如图6所示:像素阵列单元10由平面排列的M×N个矩形OLED微显示芯片组成(这里x向以M=7为例),每个该OLED微显示芯片即为本专利中的子像素阵列单元11,其分辨率为m×n,沿矩形边线方向上相邻子像素阵列单元11的间距为Δd。系统滤波单元30由具有一定通光孔径的M×N个小孔组合而成。平面分布的小透镜阵列21距离像素阵列单元10距离为d1,该小透镜的焦距为f2。这里定义从各子像素阵列单元11中心点像素投射的主光束为中心主光束。以从C1点发出的中心主光束为例,经棱镜阵列23中对应棱镜的折射,会和来自其它像素的主光束平行地入射小透镜阵列21中的对应小透镜。假设转换透镜22不存在,则平行入射的主光线,包含来自于C1点的中心主光线,被该小透镜会聚于F点。且中心主光线会和来自于其它子像素阵列单元11的中心主光线会聚于远处的OI点。图6中将OI点的位置人为放置于O点附近,以利于图的清晰观察。置入转换透镜22后,主光线的会聚点被折射到滤波单元30的小孔1处,子像素阵列投射信息经该小孔低通滤波,投射到以O点为中心的显示区域。O点是置入转换透镜22后各中心主光线的会聚点,也是OI点关于转换透镜22的像点。
为了使各中心主光线会聚于一点,需要根据系统中光学器件的几何关系,设计棱镜阵列23中各棱镜的折射功能,使来源于不同子像素阵列11的平行入射主光线偏转不同角度。图6所示结构中,中心处的子像素阵列不需要对应棱镜。
对比与实施例1,本实施例中,由于棱镜阵列23的引入,可以控制系统显示区域和系统主体结构间的距离。特别是当该距离变小时,可以降低系统对转换透镜22数值孔径的要求,拉近观察者和系统间的距离,获得更大的观察视角。但对显示物点来说,由于相邻两条主光线的夹角变大,为了保证高质量的连续的运动视差,系统要求子像素阵列间距Δd的值要更小。该实施例的图像显示原理和方法可参考实施例1。
在本实施例中,光学导向系统20也可以不包含转换透镜22,此时显示区域以OI为中心,滤波单元30各小孔的位置也应相应发生变化,移动到实际的主光线汇聚点,如F点。
在本实施例中,光学导向系统20的棱镜阵列23也可以由光栅器件或其它光偏转器件代替,其功能就是使不同子像素阵列单元投射主光线具有不同偏转角度。
实施例5
可便携的三维图像显示系统,采用同心球面分布的曲面像素阵列单元10、同心球面分布的小透镜阵列21作为光学导向系统20,以及由同心球面分布的多个具有一定通光孔径的小孔组合而成的滤波单元30,如图7。对应子像素阵列单元11、小透镜和小孔的数量为相同的M×N.三个同心球以O点为球心,显示区域位于绕O点的球形区域。各子像素阵列单元11(截面内以5个为例)投射信息经小透镜阵列21对应小透镜会聚于滤波单元30对应小孔处,低通滤波后来自不同子像素阵列11的主光束沿不同方向导向显示区域。当相邻子像素阵列11间的角间距δθ足够小时,可显示区域可以观察到具有连续位移视差的三维图像。投射信息的获取和三维图像的显示,采用原理可参考实施例1。由于采用的曲面的光学器件分布,该实施例中,系统的厚度值将变大,但结构简单,在电视等电器上有应用的前景。
在上述实例中,采用的转换透镜22都是对光线其会聚作用的凸透镜。
显然,本技术的上述实施例仅仅是为清楚地说明本技术所作的举例,而并非是对本技术的实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动。这里无需也无法对所有的实施方式予以穷举。凡在本技术的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本技术权利要求的保护范围之内。