基于PWM驱动的直流电机的测速与控制
【摘要】本文提出了一种测量PWM驱动的直流电机转速的方法,它是由软硬件两大部分构成的,硬件部分由直流电源模块,电机PWM驱动模块,速度检测模块,还有速度显示模块构成。而软件部分则由C语言编写而成,最后结果AT89C51单片机来实现功能。本设计中使用PWM驱动直流电机,然后通过光敏器件H21A3计算单位时间内由直流电机产生的脉冲数,将脉冲数送至单片机进行转速的计算,最后将结果送数码管显示出来。其中可以通过调节电机PWM驱动模块中的变阻器,对直流电机的转速进行调节,从而实现不同转速下PWM直流电机的测速。
【关键词】PWM 直流电机单片机 H21A3 脉冲计算
1.前言
直流电机由于具有体积小巧,使用方便,调速简单等优点,被广泛的应用在各类控制系统中。其中转速是直流电机的一个重要物理指标,定义为电机转轴单位时间内转过的圈数。转速测量的准确度直接影响着对直流电机的准确控制以及系统的风险性。目前市面上的转速测量仪器的种类很多,按其工作原理还有采样方式大体上可以分为机械式,光电式,电磁式还有频闪式等等[1],其中由于科学技术的发展,机械式测量电机转速已经逐渐的被市场淘汰,光电式测量转速因其实现简单,测量准确度高,已经成为了主流的测速技术之一。为此,本文提出了一种PWM驱动直流电机与转速测量系统的设计方法,为直流电机控制、测速以及应用提供一些借鉴。
2.整体方案
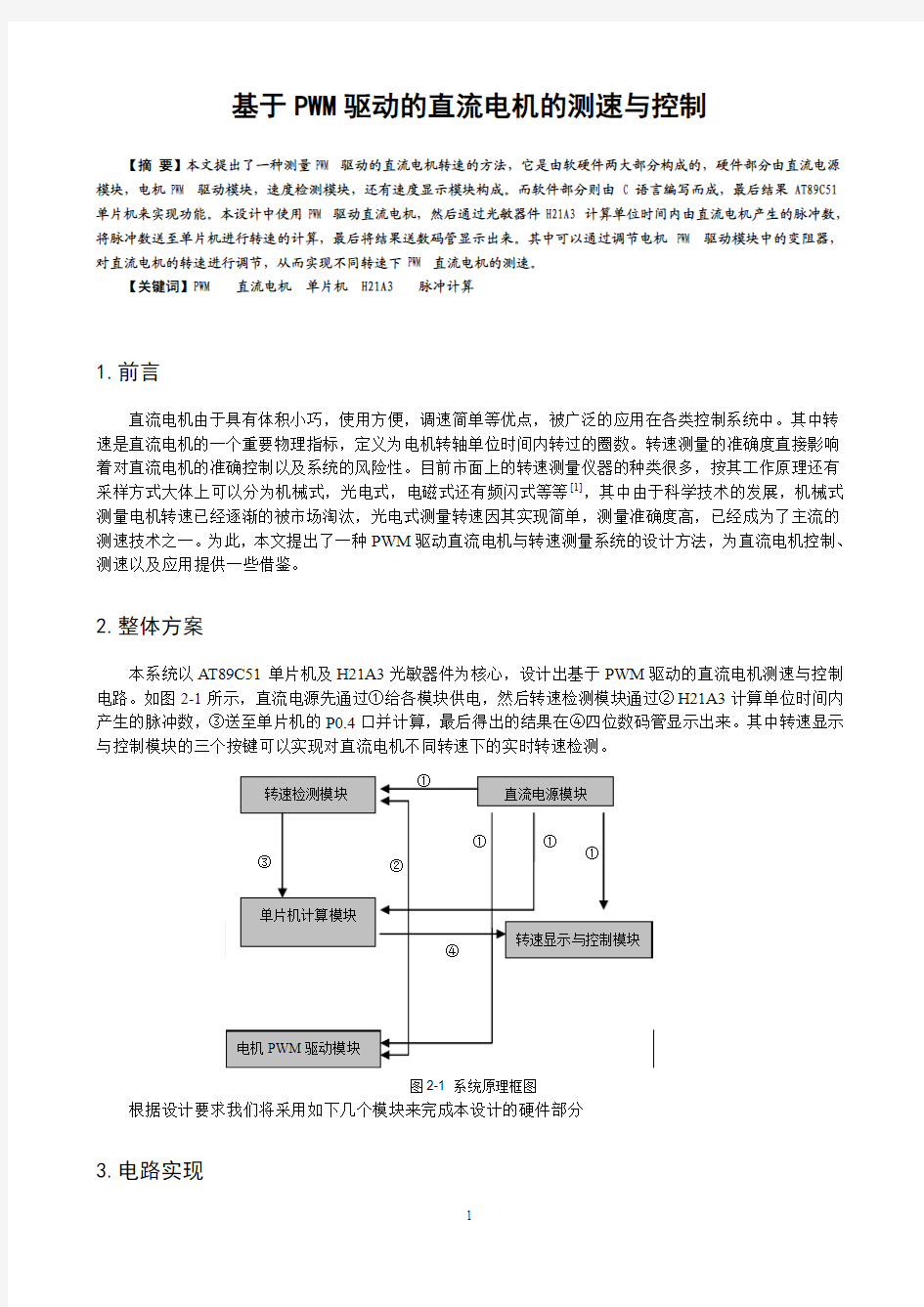
本系统以AT89C51单片机及H21A3光敏器件为核心,设计出基于PWM驱动的直流电机测速与控制电路。如图2-1所示,直流电源先通过①给各模块供电,然后转速检测模块通过②H21A3计算单位时间内产生的脉冲数,③送至单片机的P0.4口并计算,最后得出的结果在④四位数码管显示出来。其中转速显示与控制模块的三个按键可以实现对直流电机不同转速下的实时转速检测。
图2-1 系统原理框图
根据设计要求我们将采用如下几个模块来完成本设计的硬件部分
3.电路实现
3.1 直流电源模块
直流电源模块如图3-1所示
图3-1 直流电源模块
因为用分立元件组装而成的直流稳压电源具有组装,调试维修麻烦,所占的体积较大等缺点,所以在电子设备日益小型化微型化的今天,我们采用集成芯片组成的电路来代替分立元件组成的稳压电源电路。在本设计中,由于我们需要为单片机还有PWM驱动电路提供+12V +5V直流电源,所以我们选用7812,7815两种芯片,7812,7815是一种“三端稳压器”,之所以称为三端稳压器,是因为它总共有三个角,一个输入端,一个输出端,还有一个地端,它们的输出电压默认时是不可调的,因此稳压效果好。在图3-1中,我们使用三个大容量的电解电容,然后在直流稳压电路的输出端加三个小的普通电容,改善了直流稳压电路瞬态负载响应特性[2]。
3.2 电机PWM驱动模块
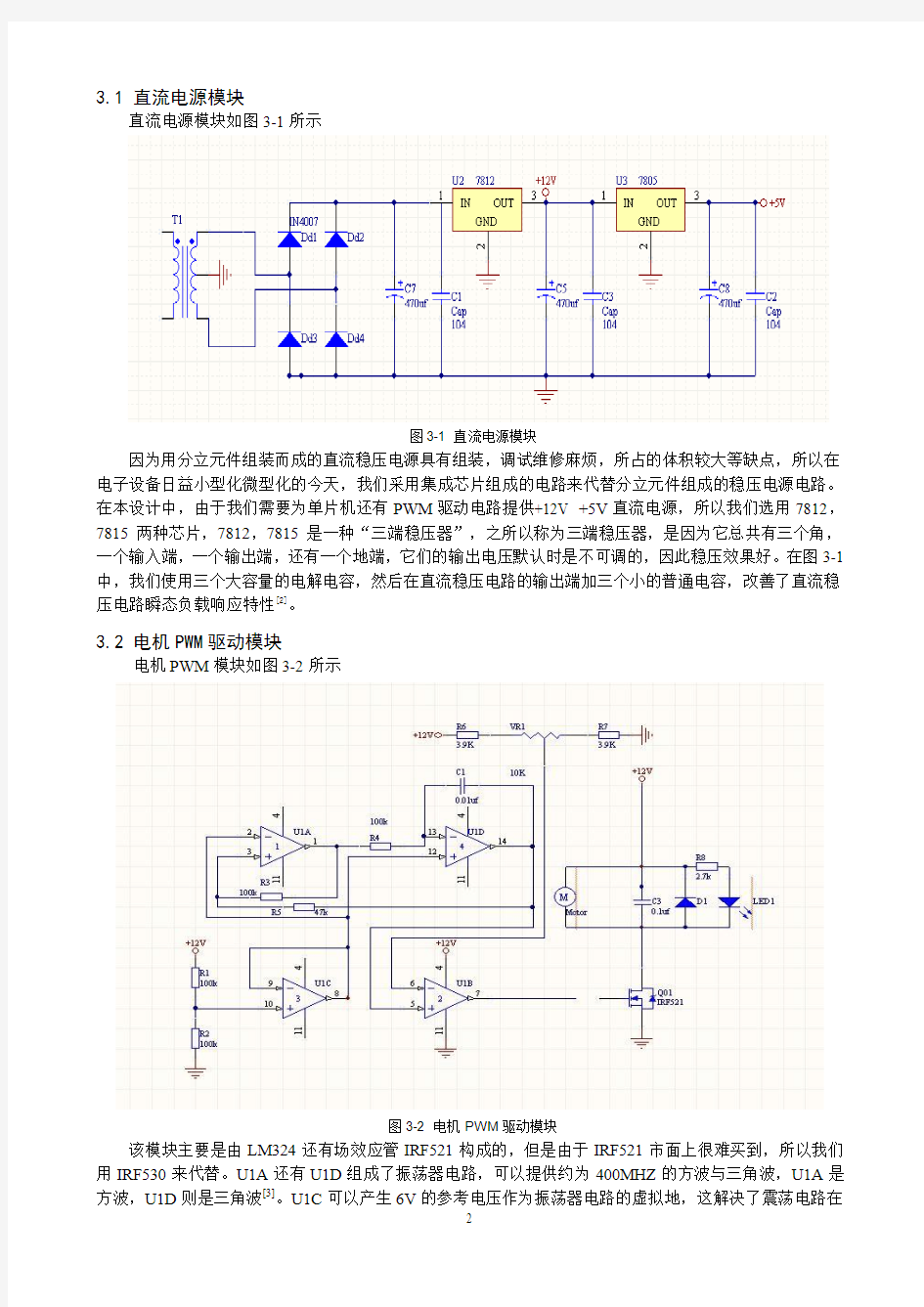
电机PWM模块如图3-2所示
图3-2 电机PWM驱动模块
该模块主要是由LM324还有场效应管IRF521构成的,但是由于IRF521市面上很难买到,所以我们用IRF530来代替。U1A还有U1D组成了振荡器电路,可以提供约为400MHZ的方波与三角波,U1A是
单电源情况下也能工作而不需要正负双电源的问题。U1B则起比较器的作用,它的反向输入端(6脚)接入电阻VR1,R6,R7,用来提供比较器的参考电压与U1D的输出端(14脚)的三角波形电压进行比较。当该电压波形的电压高于U1B的6脚电压时,U1B的7脚输出为高电平,反之,当该波形的电压低于U1B 的6脚电压时,U1B的7脚输出为低电平,所以我们可以知道,改变U1B的6脚电压,可以增加或者减少输出波形的宽度,实现PWM调制。电阻R6,R7可以用来控制VR1的范围,保证在调节VR1时可以实现输出的全开或者全关[3]。
因为市面上很难买到IRF521,所以我们使用场效应管IRF530来代替。在这里IRF530用作电流放大作用,来驱动负载。前面电路提供的不同宽度的信号通过G来控制IRF530的通断。LED1的亮度可以用来指示电路输出的脉宽。C3可以用来改善电路输出波形还有减轻电路的射频干扰。D1是用来防止电机的反电动势损坏场效应管IRF530.
PWM是通过控制固定电压的直流电源开关频率,从而改变负载两端的电压,进而达到控制要求的一种电压调整方法。PWM可以应用在许多方面,如电机调速、温度控制、压力控制等。在PWM驱动控制的调整系统中,按一个固定的频率来接通和断开电源,并根据需要改变一个周期内“接通”和“断开”时间的长短。通过改变直流电机电枢上电压的“占空比”来改变平均电压的大小,从而控制电动机的转速。因此,PWM又被称为“开关驱动装置”[5]。
用PWM脉宽调制方式来驱动直流电机还有实现调速的其中一个优点是电源的能量可以得到充分的利用,电路的转换效率会达到一个比较高的水平。比如当输出为50%的方波时,脉宽调制电路消耗的能量也差不多为50%,即几乎所有的能量都转换为负载功率输出。而我们如果采用常用的电阻降压调速时,要想使负载实现电源最大输出功率50%的功率时,电源就必须提供70%的输出功率,这其中20%的差额是损失在电阻的压降还有热耗上面的,相当于白白浪费了能量,所以我们在设计中使用PWM方式来驱动还有控制直流电机的运行,该PWM电路具有耗能低,调速灵敏,实时性好等优点。
当然,使用PWM脉宽调制来驱动电路也存在一些缺点,比如电路的构成会比较复杂,还会产生一些射频干扰。所以在制作本设计的时候将负载与控制器放在一起,否则它们之间的连线过长会对其他元件造成干扰,当然也可以增加滤波器的办法来解决干扰的问题[4]。
LM324简介如下图3-3所示,
图3-3 LM324简介
LM324为四运放集成电路,采用14脚双列直插塑料封装。,内部有四个运算放大器,有相位补偿电路。电路功耗很小,LM324工作电压范围宽,可用正电源3~30V,或正负双电源±1.5V~±15V工作。它的输入电压可低到地电位,而输出电压范围为O~Vcc。它的内部包含四组形式完全相同的运算放大器,除电源共用外,四组运放相互单独。每一组运算放大器可用如图所示的符号来表示,它有5个引出脚,其中“+”、“-”为两个信号输入端,“V+”、“V-”为正、负电源端,“Vo”为输出端。两个信号输入端中,Vi-(-)为反相输入端,表示运放输出端Vo的信号与该输入端的相位相反;Vi+(+)为同相输入端,表示运放输出端Vo的信号与该输入端的相位相同。
由于LM324四运放电路具有电源电压范围宽,静态功耗小,可单电源使用,价格低廉等特点,因此
3.3转速检测模块
3.3.1测速系统的设计
由于光电器件以及光电码盘具有响应精确、输出精度高以及使用寿命长等优点,故本设计中采用光电器件与光电码盘相结合来进行测速,其设计思想如图3-4所示。常见的光电器件有H21A3,TLP800,TLP507A 等等。因为市面上H21A3比较容易买到,所以我们在设计中选择H21A3。在光电器件的输出端得到的脉冲信号结果整形放大后送至单片机,然后在单片机里面进行运算处理,最后结果在数码管显示出来[7]。
图3-4 测速系统的设计思想
3.3.2 转速检测电路
本设计中H21A3的外观如图3-5所示
图3-5 H21A3外观
如图3-6所示,速度信号采样电路采用光电器件H21A3发光二极管LED 发出红外光,透过光电码盘的光栅照射H21A3的另一端,使其迅速的由截止状态变为导通。如此反复,形成光脉冲信号,经过T2放大,再由74LS04反向整形后送给单片机的P3.4口[8]。
图3-6 电机PWM 驱动模块电路
3.4 转速显示与控制模块
图3-7 转速显示模块电路
转速显示模块如图3-7所示,在本设计中我们使用集成4段8位数码管进行转速的显示,并采用动态显示驱动技术,动态驱动是将所有数码管的8个显示笔划"a,b,c,d,e,f,g,dp"的同名端连在一起,另外为每个数码管的公共极COM增加位选通控制电路,位选通由各W0,W1,W2,W3及K1,K2,K3,K4控制,当单片机输出字形码时,所有数码管都接收到相同的数字编码,但哪个数码管会显示出字形,取决于单片机对位选通电路的信号控制,所以我们只要将需要显示的数码管的选通信号置为高电平,该位就显示出字形,没有选通的数码管就不会亮。通过分时轮流控制各个数码管的的COM端,就使各个数码管轮流受控显示。在轮流显示过程中,每位数码管的点亮时间为1~2ms,如果我们使用延迟子程序,由于人的视觉特性以及二极管的余辉效应,尽管实际上各位数码管并非同时点亮,但只要我们程序设置的延时时间足够合理,数码管就不会有闪烁感[9].
图3-8 按键控制电路
控制模块如图3-8所示,在设计中我们使用三个按键,分别接接至单片机的P3.2及P3.3两个外部中断口。
3.5单片机计算模块
3.5.1 单片机介绍
单片机计算模块电路如图3-9所示
图3-9 单片机计算模块电路
AT89C51是美国ATMEL公司生产的低电压,高性能CMOS 8位单片机,片内含4K BYTES 的可反复擦写的FLASH只读程序存储器和128 BYTES的随机数据存储器(RAM),器件采用ATMEL公司的高密度、非易失性存储技术生产,兼容标准的MCS-51单片机指令系统,单片机内置通用8位中央处理器(CPU)和FLASH存储单元,功能强大AT89C51单片机可以提供许多高性价比的应用场合,可灵活应用于各种控制领域。
如图3-9所示,单片机的接口资源分配如下:
在本设计中采用12MHZ的时钟震荡,P3.4口接收74LS04的输出脉冲数,脉冲数送至单片机内部,如果此时按下开始按键,则系统开始计算输入的脉冲数目,若在某一时刻按下按键确定按键,则停止计算脉冲,这时候系统里面储存着这段时间间隔还有脉冲数两个数据,通过公式计算获得最后的数据[10]。
4.软件编程
程序设计流程如图4-1所示,我们是利用C语言来控制单片机的运行,并使用了R0,R1,R2三组寄存器,以及T0,T1定时器还有计数器。
图4-1 程序设计流程
5.调试结果与结果分析
5.1电路测试
在电路的硬件制作过程中,由于福建两家大的电子城都没有IRF521,所以我们选用IRF530,但是其管子的特性不是很匹配,不能完全满足电路需要。我们先进行的是软件部分的仿真与测试,如图5-1所示,我们使用的是Keil 编译器,程序编译成功,没有语法错误。
图5-1 程序编译结果
然后我们使用PGM89 Flash 编程器将程序烧写到89C51单片机,其烧写的程序界面如图5-2所示,烧写成功。
图5-2 烧写程序成功
在进行硬件调试时,由于本设计是用万用板来实现的,且分立元件比较多,所以在电路测试的时候采用独立法进行测试,即对每个模块独立供电来进行测试。电源模块的输出电压为+11.9V还有+5.05V,基本满足系统供电的要求。在对速度检测模块进行测试的时候,各管脚的电压正常,使用遮光片测试时在示波器上面有脉冲波形,但是失真明显。数码管显示模块初始化时千位以及各位显示的是9,不能正常工作。而单片机计算模块由于四位数码管存在问题,所以测试不能成功。对PWM模块测试的时候,LM324各输出口工作正常,调节变阻器时,LM324比较器部分的输出在示波器上面有变化,可是用来反映PWM波的发光二极管不会亮,不能实现调速,测试不能完成。
5.2 试验分析
在对系统各模块进行测试的时候,由于万用板在制造时的固有缺陷,在使用时容易产生虚焊,焊点不饱满,接触不良等问题,导致模块输出波形失真。而PWM模块不能实现调速则是使用IRF530代替IRF521导致的结果。数码管初始化时显示的错误的值可能是因为电路某些部分存在短接,但是经过逐点检查,没有发现短路问题,但是发现取下单片机芯片时数码管显示仍然是错误的,所以可以初步排除单片机的影响,那剩下的则可能是管脚顺序接错了,经排查,证明数码管的1脚还有二脚接错了,重新连接,数码管初始化正常。
6.结束语
我们设计的电机PWM驱动和测速系统具有驱动平稳,测速精确度高,安装使用方便等优点。尤其是
以作为工业测量控制系统反馈原件使用。
参考文献
[1] 于梅、孙桥、薛淑英.转速计量检测技术的发展现状与存在的问题[J].计算技术,2003,11:38-39
[2] 电子爱好者进阶读本编写组.电子爱好者进阶读本[C].福建:福建科学技术出版社,2006:524-528
[3] 童诗白、华成英.模拟电子技术基础[C].北京:高等教育出版社,2001:421-427
[4] 傅劲松.电子制作实例集锦[C].福建:福建科学技术出版社,2006:141-143
[5] 刘水明、蒋良中、曹杰.排爆机器人PWM 调速模块的设计[J].机电工程,2006,23(2):19-20
[6] LM324简介.https://www.doczj.com/doc/0917712100.html,/question/34697553.html?si=1
[7] 李维军、韩小刚、李晋. 基于单片机用软件实现直流电机PWM调速系统[J].机电一体化,2004,5:49-51
[8] 陈遵银,葛银茂.基于光码盘传感器的直流电机测速[J].计量技术,2002,1:29
[9] 余孟尝.数字电子技术基础简明教程[C].北京:高等教育出版社,2005:147-150
[10] 张俊谟.单片机中级教程[C].北京:北京航空航天大学出版社,2002:65-110
The Speed of Detection and Control Based on the PWM DC motor Drive
Electronic and Information Engineering Department Major of Electronic Information Engineering 118542004044 Pinjie Wang Mentor Ruikun Wu
【Abstract】This paper presents a measurement to measure speed,that of PWM DC motor driven by PWM approach speed.It is composed of software part and hardware part.The hardware part is compositioned by DC power modules, PWM motor drive module, Speed detection module and Speeddisplay Module.The software part is compositioned by the SCM https://www.doczj.com/doc/0917712100.html,ing PWM to drive a continuous current dynamo in capital being designed, and then by the pulse number that the photosensitive component H21A3 computing unit time inner produces from the continuous current dynamo,The pulse number is sent to come out till the monolithic machine carrying out the rotation rate calculation, will finally give a numerical code display finally. Rheostat in being able to drive a module by adjusting electric motor PWM among them, PWM continuous current dynamo measuring is fast under the rotation rate carrying out adjustment on the continuous current dynamo rotation rate , realizing diversity thereby.
【Key Word】PWM DC MOTO SCM H21A3 Pulse calculation
附录1
#include
#define uchar unsigned char //定义uchar 为无符号字符类型
#define uint unsigned int //定义uint 为无符号整型
uchar thous,hund,ten,one,k=2,flag=0; //千位、百位、十位、个位;k为系数
uchar code num[]={0x03,0x9f,0x25,0x0d,0x99,0x49,0x41,0x1f,0x01,0x09}; // 数码管显示段码uint time,count,count_time,speed; //time-转动时间,count-脉冲次数,count_time-200us次数,speed-速度// main() //主函数
{
While(1) //反复查询,直到Flag标志为1
{
TMOD=0x25; //TMOD为00100101定义T0以及T1的工作方式
TL0=0;
TH0=0; //初始化将脉冲计数器清空
TL1=0x47;
TH1=0x47; //定义定时器的时间间隔为200us
while(flag) //当确定中断产生时,Flag标志位为1,调用显示子程序display();
}
}
void start() interrupt 0 using 1 //0对应51单片机的int0中断服务,1是使用寄存器组R1
{
flag=0;
time=0;
TL0=0;
TH0=0;
TL1=0x47; //定时间隔200us
TH1=0x47;
TR0=1;
TR1=1; //开启计数器与定时器
}
void stop() interrupt 2 using 2 //2对应51单片机的int1,2是使用寄存器组R2
{
flag=1;
TR0=0;
TR1=0;
time=count_time*0.0002;//时间s //总的计数时间是200us的倍数
count=TH0<<8+TL0; //高八位左移加上低八位的数值即位总的脉冲数
void timer1() interrupt 3 using 0 //3对应51单片机的定时器T1的中断服务,0是使用寄存器组R0 {
count_time+=1; //定时器每过200us会产生一次溢出,每一次200us计数值自加个数一}
void delay(uint k)
{
uchar i,j;
for(i=0;i { for(j=0;j<250;j++); //功能是利用人眼的余光效应,使数码管看起来是同时点亮的} } void display() { uchar c; speed=count/time/k*60; //计算出四位速度值 thous=speed%10000/1000; hund=speed%1000/100; ten=speed%100/10; one=speed%10; //分别得出个,十,百,千位 for(c=0;c<5;c++) { P2=num[one]; P0=0x01; //选通个位输出 delay(10); P2=num[ten]; P2=0x02; //选通十位输出 delay(10); P2=num[hund]; P0=0x04; //选通百位输出 delay(10); P2=num[thous]; P0=0x08; //选通千位输出 delay(10); //延时的作用是使数码管看起来是一直亮着的 } } 附录2 附录3 单片机课程设计 基于单片机的转速测量系统设计 【摘要】介绍了一种基于AT89C51单片机平台,采用光电传感器实施电机转速测量的方法,硬件系统包括脉冲信号产生、脉冲信号处理和显示模块,并采用C语言编程,结果表明该方法具有简单、精度高、稳定性好的优点。介绍了该测速法的基本原理、实现步骤和软硬件设计 【关键词】转速测量; 单片机; 霍尔传感器;电机;脉冲。 1.概述 1.1 数字式转速测量系统的发展背景 目前国内外测量电机转速的方法很多,按照不同的理论方法,先后产生过模拟测速法(如离心式转速表、用电机转矩或者电机电枢电动势计算所得)、同步测速法(如机械式或闪光式频闪测速仪)以及计数测速法。计数测速法又可分为机械式定时计数法和电子式定时计数法。传统的电机转速检测多采用测速发电机或光电数字脉冲编码器,也有采用电磁式(利用电磁感应原理或可变磁阻的霍尔元件等)、电容式(对高频振荡进行幅值调制或频率调制)等,还有一些特殊的测速器是利用置于旋转体内的放射性材料来发生脉冲信号.其中应用最广的是光电式,光电式测系统具有低惯性、低噪声、高分辨率和高精度的优点.加之激光光源、光栅、光学码盘、CCD 器件、光导纤维等的相继出现和成功应用,使得光电传感器在检测和控制领域得到了广泛的应用。而采用光电传感器的电机转速测量系统测量准确度高、采样速度快、测量范围宽和测量精度与被测转速无关等优点,具有广阔的应用前景。 1.2 本设计课题的目的和意义 在工程实践中,经常会遇到各种需要测量转速的场合, 例如在发动机、电动机、卷扬机、机床主轴等旋转设备的试验、运转和控制中,常需要分时或连续测量和显示其转速及瞬时转速。要测速,首先要解决是采样问题。在使用模技术制作测速表时,常用测速发电机的方法,即将测速发电机的转轴与待测轴相连,测速发电机的电压高低反映了转速的高低。为了能精确地测量转速外,还要保证测量的实时性,要求能测得瞬时转速方法。因此转速的测试具有重要的意义。 这次设计内容包含知识全面,对传感器测量发电机转速的不同的方法及原理设计有较多介绍,在测量系统中能学到关于测量转速的传感器采样问题,单片机部分的内容,显示部分等各个模块的通信和联调。全面了解单片机和信号放大的具体内容。进一步锻炼我们在信号采集,处理,显示发面的实际工作能力。 直流电机测速 摘要 设计一种直流电机调速系统,以STC89C52 为控制核心,通过ULN2003 驱动电机,使用ST151 测量转速,实现了按键输入、电机驱动、转速控制、转速显示等功能。 关键词:直流电机, 80C51, ULN2003, 转速控制 第一章题目描述直流小电机调速系统: 采用单片机、ul n2003 为主要器件,设计直流电机调速系统,实现电机速度开环可调。 要求:1、电机速度分30r /m、60r /m、100r /m共3 档;2、通过按选择速度; 3、检测并显示各档速度。所需器件: 实验板(中号)、直流电机、STC89C52、电容(30pFⅹ2、10uF ⅹ2)、数码管(共阳、四位一体)、晶振(12M H z )、小按键(4 个)、ST151、电阻、发光二极管等。 第二章方案论述按照题给要求,我们最终设计了如下的解决方案:用户通过 键盘键入控制指令(开关),微控制器在收到指令 后改变输出的 PW M波,最终在 U LN2003 的驱动下电机转速发生改 变。通过 ST151 传感器测量电机扇叶的旋转情况,将转速显示在数码管上。 在程序主循环中实现按键扫描与转速显示,将定时器0 作为计数器,计数ST151 产生的下降沿,可算出转速,并送至数码管显示。 第三章硬件部分 设计 系统硬件部分包含输入模块、显示模块、控制模块、测速模块等。在硬件搭建前,先通过Pr ot eus Pr o 7. 5 进行硬件仿真实现。 1. 时钟电路 系统采用12M 晶振与两个30pF 电容组成震荡电路,接STC89C52 的 XTAL1 与 XTAL2 引脚,为微控制器提供时钟源 2. 按键电路 单片机原理及应用 课程设计报告书 题目:用单片机控制直流电动机并测量转速姓名:徐银浩 学号:1110702225 专业:电子信息工程 指导老师:沈兆军 设计时间:2014年 11月 信息工程学院 目录 1. 引言 (1) 1.1 设计意义 (1) 1.2 系统功能要求 (1) 2. 方案设计 (1) 3. 硬件设计 (3) 3.1 AT89C51最小系统 (3) 3.2 按键电路 (4) 3.3 A/D转换模块 (4) 3.4. D/A转换模块 (6) 3.5 电机转速测量电路 (7) 3.6 显示电路 (8) 3.7 总电路图 (10) 4. 软件设计 (111) 4.1 系统主程序设计 (12) 4.2 按键扫描程序设计 (12) 4.3 显示子程序 (12) 4.4 定时中断处理程序 (12) 4.5 A/D转换程序 (13) 5. 系统调试 (14) 6. 设计总结 (16) 7. 参考文献 (17) 8. 附录A;源程序 (18) 9. 附录B;电路原理总图、作品实物图片 (23) 用单片机控制直流电动机并测量转速 1 引言 1.1. 设计意义 电动机作为最主要的动力源,在生产和生活中占有重要地位。电动机的调速控制过去多用模拟法,随着计算机的产生和发展以及新型电力电子功率器件的不断涌现,电动机的控制也发生了深刻的变化,本系统利用直流电机的速度与施加电压成正比的原理,通过滑动变阻器向ADC0809输入控制电压信号,经AD后,输入到AT89C51中,AT89C51将此信号转发给DAC0832,通过功放电路放大后,驱动直流电机。 1.2.系统功能要求 单片机扩展有A/D转换芯片ADC0809和D/A转换芯片DAC0832。 通过改变A/D输入端可变电阻来改变A/D的输入电压,D/A输入检测量大小,进而改变直流电动机的转速。 手动扩展。在键盘上设置两个按键——直流电动机加速键和直流电动机减速减。在手动状态下,每按一次键,电动机的转速按照约定的速率改变。 用显示器LED或LCD显示数码移动的速度,及时形象地跟踪直流电动机转速的变化情况。 2 方案设计 为了使用单片机对电动机进行控制,对单片机的基本要求应有足够快点速度;有捕捉功能。总体设计方案如图所示 北京工业大学 课程设计报告 学院:___电控学院___专业:_电子科学与技术__班级:_120231_组号_16_ 题目:1_直流电机测速___2_小型温度控制系统_姓名:__王宁______学号:__12023110____ 指导教师:___杨旭东__成绩___________ 目录 一、前言﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍3 (一)设计题目﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍3(二)课题背景 (3) 二、设计要求 (3) (一)设计任务 (3) (二)设计框架图 (4) (三)参考元器件﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍4 (四)设计要求 (4) 1、电源模块 (4) 2、信号处理模块 (4) 3、功率放大模块 (4) (五)发挥部分 (5) 三、设计原理 (5) (一)设计原理说明 (5) (二)电源模块 (5) 1、方案选择 (5) 2、原理分析 (6) (三)变送器模块 (9) 1、方案选择............................................................................................... - 9 - 2、原理分析 (10) (四)驱动器 (11) 1、方案选择 (11) 2、原理分析 (11) 四、系统调试及实物图 (11) (一)调试顺序说明 (11) (二)电源模块调试 (11) (三)变送器模块调试 (12) (四)驱动器模块调试 (12) 五、实物图﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍﹍13 六、实验中问题分析及解决 (14) (一)稳压电源电路板 (14) (二)变送器电路板 (14) (三)驱动电路板 (15) 七、数据与误差分析 (15) (一)稳压电源电路板 (15) (二)变送器电路板 (16) (三)驱动器模块电路板 (16) 八、附录 (17) (一)系统电路的工作原理图 (17) (二)元器件识别方法和检测方法 (17) (三)参考资料 (18) 九、心得体会 (19) 目录 绪论 (2) 第1章参数计算与设备选型 (3) 1.1控制芯片 (3) 1.2测速发电机 (4) 1.3模数转化器件——ADC0809 (6) 第2章系统设计 (9) 2.1 系统方框图 (9) 2.2 硬件设计 (10) 2.2.1 直流测速发电机 (10) 2.2.2 ADC0809与单片机连接 (10) 2.2.3 数码管 (11) 2.2.4 综合接线图 (11) 2.3 软件设计 (12) 2.3.1 程序设计思路说明 (12) 2.3.2 总程序控制流程图 (13) 2.3.3 ADC0809工作流程图及程序 (14) 2.3.4显示部分工作流程图及程序 (15) 第3章结论 (18) 参考文献 (19) 绪论 在现代工业自动化高度发展的时期,几乎所有的工业设备都离不开电机,形形色色的电机在不同领域发挥着很重要的作用。与之而来的问题是,如何更好地控制电机,对于不同的场合,对电机的控制要求是不同的,但大部分都会涉及到直流电机的转速测量,从而利用转速来实施对直流电机的控制。 直流电机转速作为直流电机的一项重要技术指标,在各个应用场合都有重要的研究价值,例如在发动机,电动机,机床主轴等旋转设备的试验运转和控制中,常需要分时或连续测量,显示其转速及瞬时速度等,转速是其他大部分技术参数的计算来源,因此,准确测量直流电动机的转速具有重要的研究意义和理论价值。 目前,对直流电动机的速度检测方法很多,从整体上可分为模拟检测和数字检测方法。 模拟检测:即利用测速电机作为发电机,通过检测反电势E的大小和极性可得到转速N和电机转向,采用这种方法直接可以得到转速N和输出电压的特性曲线,直观,但也有很多不足,比如在高速和低速情况下实际输出偏离理想特性。 数字检测技术:即通过分析数字信号产生的一系列脉冲间接获取电机转速。如光电旋转编码器是将检测圆盘划分为等距的三个同心圆,最外环和次外环分别用等距的黑白条纹分开,且最外环和次外环的缝隙位置相位差为90度,用于判断电机的转速,最内环只有一个黑条纹,用作定位脉冲或者是复位脉冲,利用光电编码器输出的脉冲可以计算转速,具体的又可分为M法,T法和M\T法。 此外,市场上已经有了技术成熟的电机测速装置,如利用霍尔元件设计制作的直流电机测速仪等,凭借其精度高,稳定性好等优势占有重要的一席之地。 而本次微机控制原理课程设计的任务是直流电机速度的测量与显示。主要要求是通过测速直流发电机作为传感器,检测直流电机的转速,并输出与转速相关的电压,通过ADC0809芯片将测速发电机输出电压转换成电压的数字信号。控制芯片采用AT89C51将采集转换后的数字信号进行处理,得到转速,并通过四位数码管予以显示。整体上能够完成从转速检测到数据处理到显示的一整套功能。 可实现功能: 1 可控制左右旋转 2 可控制停止转动 3 有测速功能,即时显示在液晶上 4 有速度档位选择,分五个档次,但不能精确控速 5 档位显示在液晶上 用到的知识: 1 用外部中断检测电机送来的下降沿,在一定时间里统计 脉冲个数,进行算出转速。 2 通过改变占空比可改变电机速度,占空比的改变可以通过改变定时器的重装初值来实现。 3 要想精确控制速度,还需要用自动控制理论里的PID算法,但参数难以选定,故在此设计中没有涉及! #include<> #define uchar unsigned char #define uint unsigned int sbit PW1=P1^0 ; sbit PW2=P1^1 ; ; write_data('0'+shi); write_data('0'+ge); } /******延时函数********/ void delay(uint z) { uint x,y; for(x=z;x>0;x--) for(y=110;y>0;y--) ; } /************写指令************/ void write_com(uchar com) { lcdrs=0; Da=com; delay(1); lcden=1; delay(1); lcden=0; } /************写数据**********/ void write_data(uchar date) { lcdrs=1; Da=date; delay(1); lcden=1; delay(1); lcden=0; } /************液晶初始化**********/ void lcd_init() { lcden=0; write_com(0x38) ; //初始化 write_com(0x0c) ; //打开光标 0x0c不显示光标 0x0e光标不闪,0x0f光标闪 write_com(0x01) ; //清显示 write_com(0x80+0x40); write_data('0'); 设计名称:直流电机调速及速度系统设计院系:工学院电气与信息工程系专业班级:自动化 小组组号: 小组成员: 日期: 一、方案比较、设计与分析 1、稳压电源 直流稳压电源通过MC34063芯片所构成降压电路,把输入的24V的直流电压降为12V的直流稳压电源,为所有的电路模块和系统提供所需要的电源电压该电路的仿真图如图3所示。 图1 直流稳压电源 2、电机调速模块 脉冲宽度调制(PWM)是一种对模拟信号电平进行数字编码的方法。通过高分辨率计数器的使用,方波的占空比被调制用来对一个具体模拟信号的电平进行编码。PWM通过控制固定电压的直流电源开关频率,从而改变负载两端的电压,进而达到控制要求的一种电压调整方法。PWM可以应用在许多方面,如电机调速、温度控制、压力控制等。在PWM驱动控制的调整系统中,按一个固定的频率来接通和断开电源,并根据需要改变一个周期内“接通”和“断开”时间的长短即通过改变直流电机电枢上电压的“占空比”来改变平均电压的大小,从而达到控制电动机转速的目的。 图2 占空比仿真波形 图 3 电机调速电路图 3、测速模块 方案一:霍尔传感器测量方案 霍尔传感器是利用霍尔效应进行工作的,其核心元件是根据霍尔效应原理制成的霍尔元件霍尔转速传感器其引脚封装如图3所示。在直流电机扇叶两端放置固定的互相垂直的感应接收装置A和B,在电机的扇叶上贴上磁片HA和HB,当电 机转动的时候就会产生速度感应信号。 图4 霍尔元件封装图 优点:采用霍尔传感器是通过对磁场的感应,从而产生电信号脉冲的元件,霍尔 元件的感应灵敏,能够比较准确的反映直流电机的转速,而且改元件的体积较小, 方便使用。 方案二:光电传感器采集速度数据 转速信号由光电传感器拾取,使用时应先在直流电机的扇叶上做好光电标记,具体 办法可以是:将一片白色的纸板作为光电标记,然后将光电传感器(光电头) 固定 在正对光电标记的某一适当距离处。当直流电机转动时,光电头每照到一次白色 的纸板,光电传感器就会产生一个脉冲信号,从而达到计数的目的。 #include XI`AN TECHNOLOGICAL UNIVERSITY 课程名称直流电机测速调速实验 专业:电气工程及其自动化 班级: 姓名: 学号: 指导教师:秦刚 成绩: 2016年7月11 日 计算机控制系统课程设计 ——直流电机测速调速系统 一、选定题目:电机速度控制系统 二、设计目的和要求: 计算机控制技术的课程设计是一个综合运用知识的过程,它不仅需要微型机控制理论、程序设计方面的基础知识,而且还需要具备一定的生产工艺知识。课程设计包括确定控制任务、系统总体方案设计、硬件系统设计、控制软件的设计等,以便使学生掌握计算机控制系统设计的总体思路和方法。 三、功能需求: 1、基本功能: (1)该系统使用实验箱的直流电机、1602 液晶、 DA、键盘等模块完成设计; (2)直流电机通过DA模块使用PWM方式进行驱动及调速; (3)能够通过 1602 液晶显示当前转速及 PWM占空比;(4) 通过按键控制电机的启动和停止。 2、扩展功能: (1)能够通过按键手动输入目标转速(转/秒),启动电机后控制电机稳定 在目标转速; (2)使用 1602 液晶实时显示目标转速、当前转速及启停状态(on/off )。 四、实验思路: 本直流电机调速系统以单片机系统为依托,根据 PWM调速的基本原理,控制电动机的转速为依据,实现对直流电动机的调速,并通过单片机控制速度的变化。本设计的直流电机调速系统主要是由硬件和软件两大部分组成。硬件部分是前 提,是整个系统执行的基础,它主要为软件提供程序运行的平台。而软件部分, 是对硬件端口所体现的信号,加以采集、分析、处理,最终实现控制器所要实现 的各项功能,达到控制器自动对电机速度的有效控制。 用51 来产生 PWM波就必须要用软件编程的方法来模拟。方法大概可以分为软件延时和定时器产生两种方法。本次课程设计我们采用定时器产生PWM方波。 定时器产生PWM:这种方法利用了定时器溢出中断,在中断服务程序改变电 平的高低,在程序较复杂、多操作时仍能输出较准确的pwm波形。 五、实验设备: 单片机开发实验仪一台; AT89C51; LCD1602; DA数模转换; 按键; 光电开关 六、实验原理: 1、硬件框图: 硬件部分主要由电位器、模数转换模块、51 单片机、显示模块、驱动电路 和无刷直流电机组成。其功能框图如下: 一、概述 该课程设计是关于直流电动机转速的测量。转速是电动机极为重要的一个状态参数,一般是指电机转子的每分钟转数,通常用r/min 表示。本次课程设计选用光电测速法,测量电路由光电转换电路,整形电路,晶体振荡电路,分频电路,倍频电路,时序控制电路和计数、译码、驱动、显示电路构成,电机转速的测量范围为600r/min~30000r/min ,测量的相对误差 1%,并用5位LED 数码管显示出相应的电机转速。 本次课设需满足以下设计要求: 1根据技术指标,设计各部分电路并确定元器件参数; 2.用5位LED 数码管显示出相应的电机转速; 3.画出电路原理图(元器件标准化,电路图要规范化)。 二、方案论证 本课程设计是设计电机转速测量系统,采用光电测速方案,将转速信号转化为脉冲信号,然后用数字系统内部的时钟来对脉冲信号的频率进行测量,方案中包括光电转换电路,整形电路,闸门电路,晶体振荡电路,分频电路,倍频电路,控制电路和计数、译码、驱动、显示电路。原理方框图如图1所示: 在电动机转轴上安装一个圆盘,在圆盘上打6个均匀小孔。当电动机旋转时光源通过小孔投射到光敏三极管上,就产生了一序列的脉冲信号,光敏三极管产生的脉冲信号频率与电机转速成正比。脉冲信号经过整形电路转变成方波,再用二倍频电路使整形后的信号频率变为原来的二倍。再由晶体振荡电路输出的信号经过215分频电路, 光电转换电路 整 形 电 路 闸 门 电 路 计数、译码、驱动、显示 电路 输入 信号 晶体振荡器 电路 分 频 电 路 控 制 电 路 图1 电机转速测量系统原理框图 产生1Hz的基准信号,再经过10分频,便可产生一个0.1Hz的基准信号,该基准信号用来控制闸门电路,把经过倍频的光电转换后的信号计数并显示出来 三、电路设计 1.光电转换电路 在该部分可以用发光元件作为光的发射部分,可以选择发光二极管作发光元件,接收部分则要选择光敏三级管作为接受部件。其原理是用光敏三极管接收发光二极管通过小孔发射过来的光信号。在电机的转轴上安装上已打好6个均匀小孔的圆盘,让发光二极管与光敏三极管通过小孔相对,这样电机每转动一周,光线就会相应通过小孔6次,因为光电转换器受光一次就会产生一个脉冲,所以说电机在每转一周后就会相应的产生了6个脉冲。光电转换电路原理如图2所示: 图2 光电转换电路原理图 图中R1和R2为两个为350Ω限流电阻,LED持续发出的光被带孔圆盘间歇性阻断,变成间断的光信号,而光敏三极管将接收到的光信号转化成电信号,作用于之后的系统。 2.整形电路 整形电路用555定时器构成施密特触发器,利用施密特触发器,将输入的信号进行整形,输出为方波。2和6管脚连在一起接输入信号,从3管脚输出,输入信号与 输出信号反相,在5管脚接入10nF的滤波电容,当输入电压v i ﹤1/3Vcc时,v o 输出 为高电平,当输入电压v i ﹥2/3Vcc时,v o 输出为低电平。整形电路接法及输出波形如 图3和图4所示: 直流电机调速与测速系统设计 【摘要】直流电机具有宽广的调速范围,平滑的无级调速特性。利用PWM 脉冲信号的占空比决定输出到直流电机的平均电压的大小。通过调节占空比,可以实现调节输出电压的目的,而且输出电压可以实现无级连续调节。以AT89S51单片机为核心的直流电机调速与测速系统的设计方法,给出了系统的主电路结构,以及驱动电路设计和系统软件设计。充分利用了单片机的优点,具有频率高、响应快的特点。 【关键词】直流电机;单片机;调速测速;PWM;占空比 直流电机是工业生产中常用的驱动设备,具有良好的起动、制动性能。早期直流电动机的控制均以模拟电路为基础,采用运算放大器、非线性集成电路以及少量的数字电路组成。控制系统的硬件部分复杂、功能单一,调试困难。采用单片机控制系统,使得许多控制功能及算法可以采用软件技术来完成,为直流电动机的控制提供了更大的灵活性,并使系统能达到更高的性能。 1.基于单片机的PWM直流调速原理 PWM(脉冲宽度调制Pulse Width Modulation)简称脉宽调制,是利用微处理器的数字输出来对模拟电路进行控制的一种技术,广泛应用在测量、功率控制与变换等许多领域中。脉宽调制是一种模拟控制方式,其根据相应载荷的变化来调制晶体管基极的偏置,改变晶体管导通时间。是利用微处理器的数字输出来对模拟电路进行控制的一种非常有效的技术。 PWM可以应用在许多方面,如电机调速、温度控制、压力控制等。在PWM 驱动控制的调整系统中,按一个固定的频率来接通和断开电源,并根据需要改变一个周期内“接通”和“断开”时间的长短。通过改变直流电机电枢上电压的“占空比”来改变平均电压的大小,从而控制电动机的转速。因此,PWM又被称为“开关驱动装置”。PWM的占空比决定输出到直流电机的平均电压。所以通过调节占空比,可以实现调节输出电压无级连续调节。 2.调速和测速系统的主体电路设计 整个系统由输入电路、PWM调制、测速电路、驱动电路、控制部分及显示等部分组成,PWM调制选用AT89S51单片机通过软件实现频率和占空比的调节。 2.1 直流电机调速的设计方案 驱动电路用光耦隔离保护电路,控制部分由单片机和外围电路组成,实现各种控制要求,外围电路主要完成对输入信号的采集、操作、对速度进行控制,显示部分采用四位共阳数码管。系统方框图如图1所示。 本科实验报告 课程名称:微机原理及接口技术 课题项目:直流电机测速实验 专业班级:电科1201 学号:2012001610 学生姓名:王天宇 指导教师:任光龙 2015年 5 月24 日 直流电机测速实验 一、实验目的 1.掌握8254的工作原理和编程方法 2.了解光电开关,掌握光电传感器测速电机转速的方法。 二、实验内容 光电测速的基本电路有光电传感器、计数器/定时器组成。被测电机主轴上固定一个圆盘,圆盘的边缘上有小孔。传感器的红外线发射端和接收端装在圆盘的两侧,电机带动圆盘转到有孔的位置时,红外线光通过,接收管导通,输出低电平。红外线被挡住时,接收截止,输出高电平。用计数器/定时器记录在一定时间内传感器发出的脉冲个数,就可以计算车电机的转速, 三、线路连接 线路连接:8254计数器/定时器0和2作为定时器,确定测速时间,定时器0的CLK0连1MHZ脉冲频率,OUT0作为定时器2的输入,与CLK2相连,输出OUT2与8255的PA0端相连。GATE0和GATE2均接+5V,8354计数器/定时器1作为计数器,,输入CLK1与直流电机计数端连接,GATE1与8254的PC0相连。电机DJ端与+5V~0V模拟开关SW1相连。如下图所示。 四、编程提示 8254计数器/定时器1作为计数器记录脉冲个数,计数器/定时器0和2作为定时器,组成10~60秒定时器,测量脉冲个数,算出点击每分钟的转速并显示在屏幕上, 8255的PA0根据OUT2的开始和结束时间,通过PC0向8254计数器/定时器1发出开始和停止计数信号。 五、流程图 六、实验程序: DATA SEGMENT IOPORT EQU 0D880H-0280H IO8255K EQU IOPORT+283H IO8255A EQU IOPORT+280H IO8255C EQU IOPORT+282H IO8254K EQU IOPORT+28BH IO82542 EQU IOPORT+28AH IO82541 EQU IOPORT+289H IO82540 EQU IOPORT+288H MESS DB 'STRIKE ANY KEY,RETURN TO DOS!', 0AH, 0DH,'$' COU DB 0 COU1 DB 0 COUNT1 DB 0 COUNT2 DB 0 COUNT3 DB 0 COUNT4 DB 0 DATA ENDS CODE SEGMENT 实验四直流电机测速实验 一、实验目的: (1)掌握8254的工作原理和编程方法; (2)了解光电开关,掌握用光电传感测量电机转速的方法。 二、实验内容: 光电测速的基本电路由光电传感器,计数器/定时器组成。被测电机主轴上 固定一个圆盘,圆盘的边缘上有小孔。传感器的红外发射端和接收端装在圆盘的两侧,电机带动圆盘转到有孔的位置时,红外光通过,接收管导通,输出低电平。红外光被挡住时,接收截止,输出高电平。用计数器/定时器记录在一定时间内 传感器发出的脉冲个数,就可以计算出电机的转速。 三、线路连接: 线路连接如图4.5所示,8254计数器/定时器0和2作为定时器,确定测速时间,定时器0的CLK0连1MHZ脉冲频率,OUT0作为定时器2的输入,与CLK2 相连,输出OUT2与8255的PA0端相连。GATE0和GATE2均接+5V,8254计数器/ 定时器1作为计数器,输入CLK1与直流电机计数关连接,GATE1与8255的PC0相连。电机DJ端与+5V~0V模拟开关SW1相连。 四、编程提示: 8255计数器/定时器1作为计数器,记录脉冲个数,计数器/定时器0和2 作为定时器,组成10~60秒定时器,测量脉冲个数,算出电机每分钟的转速并显示在屏幕上。 8255的PA0根据OUT2的开始和结束时间,通过PC0向8254计数器/定时器1发出开始和停止计数信号。 五、流程图 如图4.6所示 图 4.6直流电机测速程序流程图 六,编写源程序如下: DATASEGMENT IOPORTEQU0D880H-0280H IO8255KEQUIOPORT+283H;8255控制口 IO8255AEQUIOPORT+280H;8255A口 IO8255CEQUIOPORT+282H;8255C口 IO8254KEQUIOPORT+28BH;8254控制 IO82542EQUIOPORT+28AH;8254计数器2 IO82541EQUIOPORT+289H;8254计数器1 IO82540EQUIOPORT+288H;8254计数器0 MESSDB'STRIKEANYKEY,RETURNTODOS!',0AH,0DH,'$' COUDB0 单片机综合实训报告 专业:详详细细 姓名:xxxxx 学号:小行星 联系方式:详详细细 指导教师:粗粗糙糙 时间:2013年6月14日—6月28日 摘要 在电气时代的今天,电机在工农业生产与人们日常生活中都起着十分重要的作用。直流电机作为最常见的一种电机,具有非常优秀的线性机械特性、较宽的调速范围、良好的起动性以及简单的控制电路等优点,因此在社会的各个领域中都得到了十分广泛的应用。 随着单片机技术的日新月异,使得许多控制功能及算法可以采用软件技术来完成,为直流电动机的控制提供了更大的灵活性,并使系统能达到更高的性能。采用单片机构成控制系统,可以节约人力资源和降低系统成本,从而有效的提高工作效率。 在工程实践中,经常会遇到各种需要测量转速的场合, 例如在发动机、电动机、卷扬机、机床主轴等旋转设备的试验、运转和控制中,常需要分时或连续测量和显示其转速及瞬时转速。要测速,首先要解决是采样问题。在使用模技术制作测速表时,常用测速发电机的方法,即将测速发电机的转轴与待测轴相连,测速发电机的电压高低反映了转速的高低。为了能精确地测量转速外,还要保证测量的实时性,要求能测得瞬时转速方法。因此转速的测试具有重要的意义。 本文介绍了一种基于AT89C51 单片机平台,采用光电传感器实施电机转速测量的方法,硬件系统包括脉冲信号产生、脉冲信号处理和显示模块,并采用C 语言编程,结果表明该方法具有简单、精度高、稳定性好的优点。介绍了该测速法的基本原理、实验步骤和软硬件设计 这次设计内容包含知识全面,对传感器测量发电机转速的不同的方法及原理设计有较多介绍,在测量系统中能学到关于测量转速的传感器采样问题,单片机部分的内容,显示部分等各个模块的通信和联调。全面了解单片机和信号放大的具体内容。进一步锻炼我们在信号采集,处理,显示发面的实际工作能力。 关键词 单片机AT89C51 直流电机转速测量光电传感器电机脉冲 单片机课程设计报告书 题目:电机测速系统 院系名称:自动化学院 学生姓名: 专业名称:自动化 班级:自动XXXX班 时间:20XX年X月X日至 X月XX日 电机测速系统 一、设计目的 随着科技的飞速发展,计算机应用技术日益渗透到社会生产生活的各个领域,而单片机的应用则起到了举足轻重的作用。在工程实践中,经常会遇到各种需要测量转速的场合,例如在发动机、电动机、机床主轴等旋转设备的试验运转和控制中,常需要分时或连续测量、显示其转速及瞬时速度。为了能精确地测量转速,还要保证测量的实时性,要求能测得瞬时转速。因此设计一种较为理想的电机测速控制系统是非常有价值的。 二、设计要求 1.用按键控制电机起停; 2.电机有两种速度,通过按键来改变速度; 3.通过数码管显示每分钟或每秒的转速。 四、设计方案及分析(包含设计电路图) 1. STC89C52单片机介绍 STC89C52是一种带8K字节闪烁可编程可檫除只读存储器(FPEROM-Flash Programmable and Erasable Read Only Memory )的低电压,高性能COMOS8的微处理器,俗称单片机。该器件采用ATMEL搞密度非易失存储器制造技术制造,与工业标准的MCS-51指令集和输出管脚相兼容。 (1)单片机最小系统 单片机最小系统电路如图所示,由主控器STC89C52、时钟电路和复位电路三部分组成。单片机STC89C52作为核心控制器控制着整个系统的工作,而时钟电路负责产生单片机工作所必需的时钟信号,复位电路使得单片机能够正常、有序、稳定地工作。 图单片机最小系统 (2)晶振电路 (3)复位电路 机电学院 电子课程设计报告题目:直流电机测速器 专业班级:应用电子技术111 姓名: 时间:2013.12.9 ~2013.12.27 指导教师: 完成日期:2013年12月27日 直流电机测速器设计任务书 1.设计目的与要求 设计一个电动机测速器,要认真并准确地理解有关要求,独立完成系统设计,要求所设计的电路具有以下功能: (1)测量电动机六秒钟所转的圈数,显示电动机转速; (2)3个数码管显示电动机转速(转/分); (3)转速超出所测范围时,进行灯光报警。 2.设计内容 (1)画出电路原理图; (2)元器件及参数选择; (3)电路仿真; (4)搭接所设计的电路完成设计功能。 3.编写设计报告 写出设计的全过程,附上有关资料和图纸,有总结体会。 4.答辩 在规定时间内,完成叙述并回答问题。 目录 1引言 (1) 2 总体设计方案 (1) 2.1 设计思路 (1) 2.2 总体设计框图 (2) 3 设计原理分析 (2) 3.1 传感器电路 (2) 3.2 计数电路 (3) 3.3 显示电路 (5) 3.4 定时电路 (6) 3.5报警电路 (7) 3.6总体电路 (7) 3.7仿真电路 (8) 3.8调试图 (9) 4 总结与体会 (9) 参考文献 (10) 附录1 (11) 直流电机测速器 摘要:在工程实践中,经常会遇到各种需要测量转速的场合,测量转速的方法分为模拟式和数字式两种。模拟式采用测速发电机为检测元件,得到的信号是模拟量。数字式通常采用光电编码器,霍尔元件等为检测元件,得到的信号是脉冲信号。电机在运行过程中,需要对其进行监控,转速是一个必不可少的一个参数。本系统就是对电机转速进行测量,显示电机的转速,并观察电机运行的基本状况。本设计主要用霍尔传感器、LED数码显像管、555定时器、及74LS93组成的计数器构成。本文重点是测量速度并在3位LED数码管上显示电机六秒钟所转圈数,及超过预定值时经行的灯光报警。 关键词:霍尔元件,小直流电机,定时 1引言 在工程实践中,经常会遇到各种需要测量转速的场合, 例如在发动机、电动机、卷扬机、机床主轴等旋转设备的试验、运转和控制中,常需要分时或连续测量和显示其转速及瞬时转速。 目前国内外测量电机转速的方法很多,按照不同的理论方法,先后产生过模拟测速法(如离心式转速表、用电机转矩或者电机电枢电动势计算所得)、同步测速法(如机械式或闪光式频闪测速仪)以及计数测速法。计数测速法又可分为机械式定时计数法和电子式定时计数法。传统的电机转速检测多采用测速发电机或光电数字脉冲编码器,也有采用电容式(对高频振荡进行幅值调制或频率调制)等,还有一些特殊的测速器是利用置于旋转体内的放射性材料来发生脉冲信号。本文将介绍利用电磁式(利用电磁感应原理或可变磁阻的霍尔元件等)来获取脉冲信号经行测速。 2总体设计方案 2.1设计思路 科信学院 课程设计说明书(2012/2013学年第二学期) 课程名称:单片机应用课程设计 题目:简易小直流电机测速 专业班级:10级自动化三班 学生姓名:师鑫源 学号:100412309 指导教师:苗敬利高敬格王巍杨怡君 设计周数:两周 设计成绩: 2013年6月27日 目录 摘要.......................................................................................................... ............................ (3) 1、课程设计目的 (4) 2、课程设计要求 (4) 3、课程设计器材 (4) 4、课程设计正文 (5) 4.1系统分析与实施 (5) 4.2硬件部分 (5) 4.2.1 STC90C52AD功能参数介绍 (5) 4.2.2时钟电路设计 (6) 4.2.3按键电路设计 (8) 4.2.4显示电路设计 (8) 4.2.5复位电路设计 (9) 4.2.6检测电机转速的电路设计 (10) 4.3系统硬件调试 (12) 4.3.1.调试方案 (12) 4.3.2.仿真调试结果 (12) 4.3.3硬件调试结果 (12) 4.4 软件设计 (14) 4.4.1软件系统分析 (14) 4.4.2 系统软件设计 (17) 4.4.3 系统软件实施与调试 (23) 5、课程设计总结 (23) 6、课程设计经验 (24) 7、参考文献 (24) 附录一、protel软件绘制的工作原理图 (11) 附录二、PROTUES软件绘制的仿真图 (13) 摘要 姓名-学号 成绩 分组序号 同组人员(签名) 本人贡献排名 指导教师(签名) 摘要 本设计基于单片机STC90C516RD+为核心,以小型直流电机为对象,以L9110芯片为驱动核心,通过4个按键,实现直流电机的启动,速度和方向的控制,并通过液晶LCD1602显示出来。对直流电机进行速度测量的原理,采用了PWM技术对电机进行控制,通过对占空比的计算达到精确调速的目的。实时测量电机的实际转速,并显示出来。 采取传统的调速系统主要有以下的缺陷:模拟电路容易随时间飘移,会产生一些不必要的热损耗,以及对噪声敏感等。而用PWM技术后,避免上述的缺点,实现了数字式控制模拟信号,可以大幅度减低成本和功耗。并且PWM调速系统开关频率较高,仅靠电枢电感的滤波作用就可以获得平滑的直流电流,低速特性好;同时,开关频率高,快响应特性好,动态抗干扰能力强,可获很宽的频带;开关元件只需工作在开关状态,主电路损耗小,装置的效率高,具有节约空间、经济好等特点。 关键词:单片机;PWM;直流电机;L9110; 目录 一、设计任务 (4) 二、设计方案 (4) 1、设计思路 (4) 2、基本原理与总体设计框图 (5) 三、系统硬件设计 (6) 1、 STC90C51最小系统 (6) (1) STC90C516RD+芯片 (6) (2)系统时钟电路 (6) (3)复位电路 (7) (4)最小系统原理图 (7) 2、直流电机设计部分 (8) (1)直流电机的基本结构 (8) (2)直流电机的工作原理 (8) (3)直流电机PWM调速原理 (9) 3、电机驱动及测速模块 (11) 4、液晶显示部分 (11) 5、独立按键模块 (12) 四、系统软件设计 (13) 1、电机控制流程图 (14) 2、显示程序流程图 (15) 3、定时中断流程图 (15) 五、调试与结果 (16) 六、心得体会 (17) 参考文献 (18) 附录一元器件清单 (19) 附录二程序清单 (20) 数字电路课程设计报告书课设名称:直流电机测速 姓名:张赫 学号:10020113 学院:电控学院 专业:自动化 指导老师: 完成日期:2012年3月 目录 一、题目名称及设计任务的选择 (1)题目名称 (2)设计任务的选择 二、设计任务及设计要求 (1)设计任务 (2)设计要求 (3)参考元件 三、设计思路及设计原理 (1)设计流程图 (2)主要芯片说明 (3)实验原理 四、对设计方案的论证和比较 五、电路所涉及的参数计算 六、调试过程中的问题及解决方案 七、心得体会 八、附录 (1)二极管的简易测试机管脚判别 (2)电阻色环的识别及其色环对应表 (3)题目所用电子元件清单 九、实验照片 十、参考文献 一、题目名称及设计任务的选择 (1)题目名称 根据本专业的课程要求及需要和自己的兴趣,我们在此次课程设计中所选的题目是直流电机测速。 (2)设计任务的选择 现代社会对电机的应用越来越广泛,利用电机可以带动很多的机器进行运转,这些机器为我们生产出必需的生活,工作和学习用品,可以说电机对我们的生活产生了很大的影响。如果通过此次课程设计实践能设计出一个能对直流电机进行调速和测速的电路那我们将会受益匪浅,这是我们选择此题目的一个原因。 另外通过此次课设可以增进对电路的设计、操作和分析的技能,本题目涉及NE555定时器、计数器和逻辑与非们的应用,它们在以后的应用十分广泛,通过此次实践如果能把它们熟练掌握,这将为我以后的电子设计竞赛打下一定的基础。 综合以上我们决定做这个题目。 二、设计任务及设计要求 (1)设计任务 此次试验我们将要设计一个能对直流电动机运行速度进行调速和测速的电路。 (2)设计要求 本题目的设计要求包括基本要求和扩展要求。 基本要求是设计一个脉宽调速电路,实现对直流电机转速的控制。 利用光电脉冲转换、整形、门控电路和计数电路测出直流电机的转速,并显示在数码管上。要求转速可达到300转/分以下,越低越好。 科信学院 课程设计说明 (2012/2013学年第二学期) 课程名称:单片机应用课程设计 简易小直流电机测速 专业班级:10级自动化三班 学生姓名:师鑫源 学号: 100412309 指导教师:苗敬利高敬格王巍杨怡君 设计周数:两周 设计成绩: 2013年6月27日 摘要..................... 1、课程设计目的.......... 2、课程设计要求........ 3、课程设计器材.......... 4、课程设计正文........... 4.1 系统分析与实施..... 4.2 硬件部分........... 4.2.1 STC90C52AD 4.2.2 时钟电路设计 4.2.3 按键电路设计 4.2.4 显示电路设计 4.2.5 复位电路设计 4.2.6 检测电机转速的电路设计.. 4.3 系统硬件调试...................... 4.3.1. 调试方案.................. 4.3.2. 仿真调试结果............... 4.3.3 硬件调试结果................ 4.4 软件设计......................... 4.4.1 软件系统分析................ 4.4.2 系统软件设计................ 4.4.3 系统软件实施与调试.......... 5、课程设计总结......................... 6、课程设计经验......................... 7、参考文献............................. 附录一、protel 软件绘制的工作原理图附录 二、P ROTUE软件绘制的仿真图… 功能参数介绍 摘要10 12 12 12 12 14 14 17 23 23 24 24 .11 13直流电机测速
课程设计实验报告-直流电机测速 (1)
单片机控制直流电机并测速(电压AD、DA转换以及pwm按键调速正转反转)
北京工业大学大二下直流电机测速实验报告
基于单片机的直流电机转速测量与显示(DOC)
直流电机测速并显示
直流电机测速系统
直流电机+PWM+测速显示(1)
计算机控制系统课程设计直流电机测速调速系统
直流电机转速测量系统的设计
直流电机调速与测速系统设计
微机原理实验报告直流电机测速实验
微机原理直流电机测速实验
单片机直流电机测速系统实训报告
直流电机测速系统课程设计
直流电机测速器
简易小直流电机测速
直流电机调速测速按键显示
直流电机测速
简易小直流电机测速
相关主题
文本预览