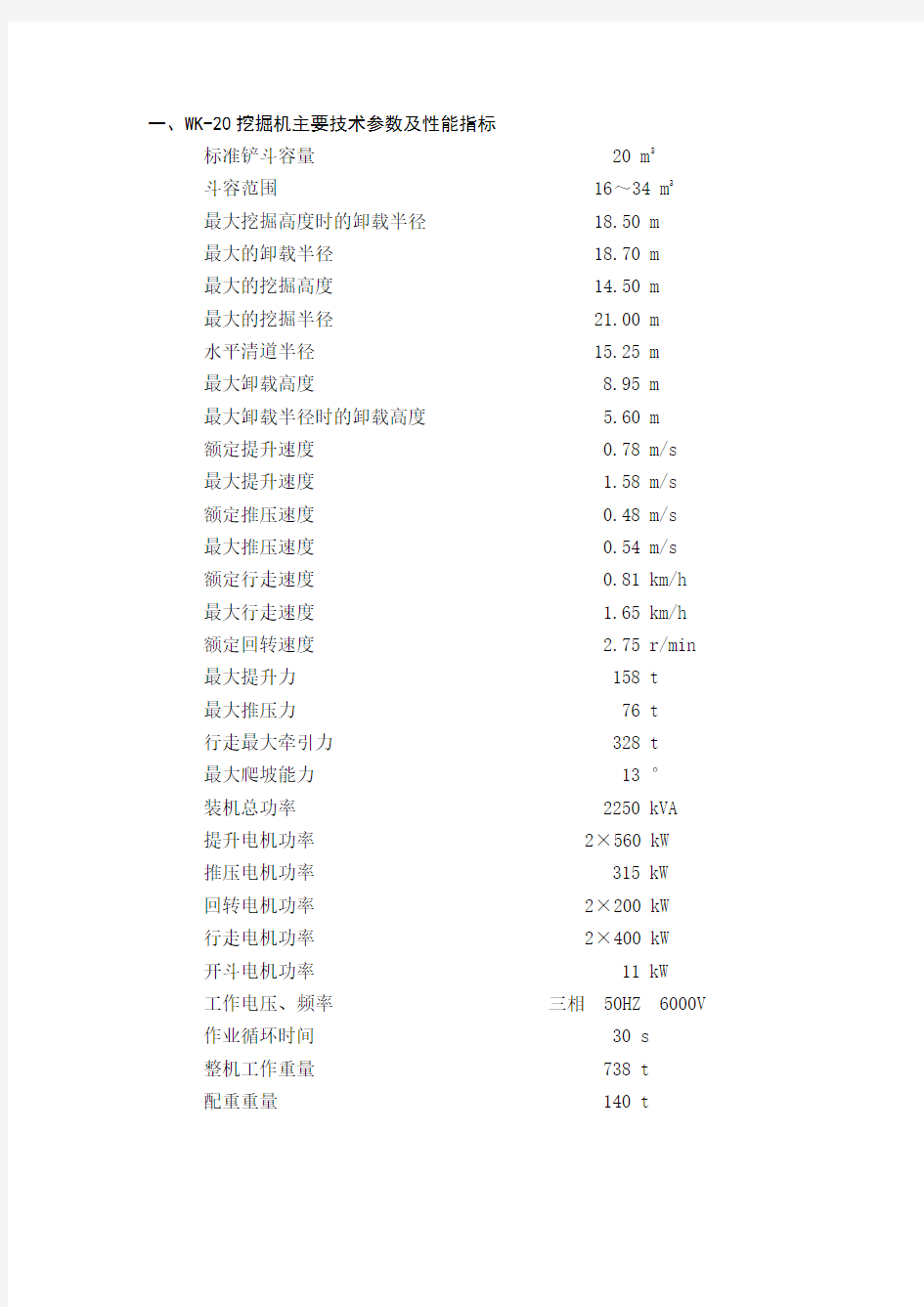
一、WK-20挖掘机主要技术参数及性能指标
标准铲斗容量 20 m3
斗容范围 16~34 m3
最大挖掘高度时的卸载半径 18.50 m
最大的卸载半径 18.70 m
最大的挖掘高度 14.50 m
最大的挖掘半径 21.00 m
水平清道半径 15.25 m
最大卸载高度 8.95 m
最大卸载半径时的卸载高度 5.60 m
额定提升速度 0.78 m/s
最大提升速度 1.58 m/s
额定推压速度 0.48 m/s
最大推压速度 0.54 m/s
额定行走速度 0.81 km/h
最大行走速度 1.65 km/h
额定回转速度 2.75 r/min
最大提升力 158 t
最大推压力 76 t
行走最大牵引力 328 t
最大爬坡能力 13 °
装机总功率 2250 kVA
提升电机功率 2×560 kW
推压电机功率 315 kW
回转电机功率 2×200 kW
行走电机功率 2×400 kW
开斗电机功率 11 kW
工作电压、频率三相 50HZ 6000V 作业循环时间 30 s
整机工作重量 738 t
配重重量 140 t
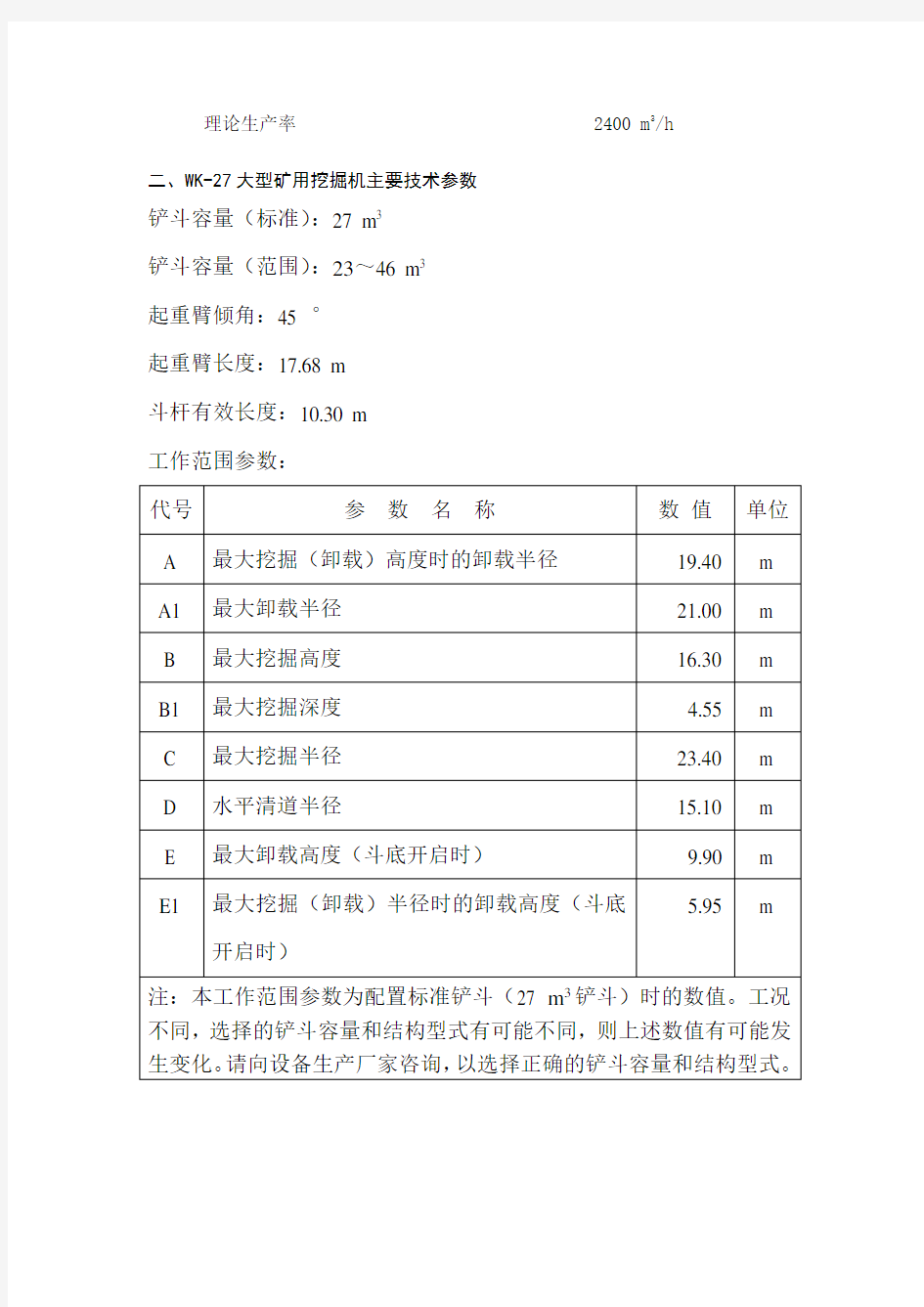
理论生产率 2400 m3/h
二、WK-27大型矿用挖掘机主要技术参数
铲斗容量(标准):27 m3
铲斗容量(范围):23~46 m3
起重臂倾角:45 °
起重臂长度:17.68 m
斗杆有效长度:10.30 m
工作范围参数:
一般几何尺寸参数:
工作重量和履带对地平均比压
配重重量:165 t
最大提升力:2150 kN
最大提升速度:1.23 m/s
最大推压力:790 kN
最大推压速度:0.63 m/s
回转力矩:2845332 N·m
回转速度:2.40 r/min
履带最大牵引力:3750 kN
最大行走速度:1.73 km / h
挖掘循环周期(90°回转角):32 s 连续爬坡角度:7°
最大爬坡角度:12°
理论生产率:3030 m3 / h
电气系统参数
三、WK-35大型矿用挖掘机主要技术参数
铲斗容量(标准):35 m3
铲斗容量(范围):25~54 m3
起重臂倾角:45 °
起重臂长度:17.68 m
斗杆有效长度:10.30 m
工作范围参数:
一般几何尺寸参数:
工作重量和履带对地平均比压
配重重量:228 t
最大提升力:2150 kN
提升速度:0.82~1.60 m/s
最大推压力:850 kN
推压速度:0.58~0.65 m/s
回转力矩:3510598 N·m
回转速度:2.69 r/min
履带最大牵引力:4520 kN
行走速度:0.76~1.08 km / h
挖掘循环周期(90°回转角):30 s
连续爬坡角度:7°
最大爬坡角度:12°
理论生产率:4200 m3 / h
电气系统参数
四、WK-55挖掘机主要技术参数和性能参数
标准铲斗容量:55 m3;
斗容范围:36~76 m3;
最大提升力:2890 kN;
提升速度(额定~最大):0.76~1.58 m/s;
最大推压力:1127 kN;
推压速度(额定~最大):0.67~0.75 m/s;
回转速度:2.54 r/min;
行走最大牵引力:5860 kN;
行走速度(额定~最大):0.80~1.60 km/h;
最大连续爬坡角度:15 %
履带接地比压:~362 kPa;
理论作业循环时间(回转70°): 30 s
理论生产率:6600 m3/h。
工作尺寸
最大的挖掘半径 23.85 m
最大的挖掘高度 18.10 m
最大的卸载半径 20.40 m
最大卸载高度 10.06 m
最大挖掘深度 1.93 m
最大卸载高度时的卸载半径 19.50 m 最大卸载半径时的卸载高度 6.35 m 最大挖掘高度时的挖掘半径 22.05 m 最大挖掘半径时的挖掘高度 10.20 m 水平清道半径 16.90 m 司机水平视线高度: 10.10 m ;
几何尺寸
起重臂长度:20177 mm
起重臂倾角:45°
斗杆有效长度:10410 mm
设备总宽度:~14033 mm
机棚司机室总长度:14300 mm
A形架最大高度:14350 mm
履带板宽度:2210 mm
履带装置总宽度:10488 mm
履带装置总长度:11700 mm
履带装置高度:3036 mm 3010
底架距地高度:660 mm
配重块距地高度:2421 mm
配重箱距地高度:3180 mm
电气参数
电气系统:交流变频+PLC控制
供电电压及频率:6000V AC 50Hz
主变压器容量:3000 kVA
辅助变压器容量:450 kVA
提升电机(两台)峰值功率:2×1390 kW= 2780 kW;
提升电机(两台)额定功率:2×1115 kW= 2230 kW;
额定电压:690 VAC
额定频率:24 Hz
额定电流:1113 A
最大电流:1388 A
最大转矩:28038 N·m
额定转速:473 r/min
弱磁升速:990 r/min;
回转电机(三台)峰值功率:3×575 kW= 1725 kW;回转电机(三台)额定功率:3×450 kW= 1350 kW;
额定电压:690 VAC
额定频率:48.7 Hz
额定电流:469 A
最大电流:603 A
最大转矩:5730 N·m
额定转速:965 r/min;
推压电机(壹台)峰值功率: 937 kW;
推压电机(壹台)额定功率: 750 kW;
额定电压:690 VAC
额定频率:34.9 Hz
额定电流:740 A
最大电流:922 A
最大转矩:12974 N·m
额定转速:690 r/min
弱磁升速:774 r/min;
行走电机(两台)峰值功率:2×742 kW= 1484 kW;行走电机(两台)额定功率:2×595 kW= 1190 kW;
额定电压:690 VAC
额定频率:29.8 Hz
额定电流:613 A
最大电流:742 A
最大转矩:12000 N·m
额定转速:592 r/min
弱磁升速:1172 r/min。
开斗电机功率 15 kW 整机工作重量:~1480 t。
其中:机器净重~1285 t;平衡重195 t。
一、WK-20挖掘机主要技术参数及性能指标 标准铲斗容量 20 m3 斗容范围 16~34 m3 最大挖掘高度时的卸载半径 18.50 m 最大的卸载半径 18.70 m 最大的挖掘高度 14.50 m 最大的挖掘半径 21.00 m 水平清道半径 15.25 m 最大卸载高度 8.95 m 最大卸载半径时的卸载高度 5.60 m 额定提升速度 0.78 m/s 最大提升速度 1.58 m/s 额定推压速度 0.48 m/s 最大推压速度 0.54 m/s 额定行走速度 0.81 km/h 最大行走速度 1.65 km/h 额定回转速度 2.75 r/min 最大提升力 158 t 最大推压力 76 t 行走最大牵引力 328 t 最大爬坡能力 13 ° 装机总功率 2250 kVA 提升电机功率 2×560 kW 推压电机功率 315 kW 回转电机功率 2×200 kW 行走电机功率 2×400 kW 开斗电机功率 11 kW 工作电压、频率三相 50HZ 6000V 作业循环时间 30 s 整机工作重量 738 t 配重重量 140 t
理论生产率 2400 m3/h 二、WK-27大型矿用挖掘机主要技术参数 铲斗容量(标准):27 m3 铲斗容量(范围):23~46 m3 起重臂倾角:45 ° 起重臂长度:17.68 m 斗杆有效长度:10.30 m 工作范围参数:
一般几何尺寸参数:
工作重量和履带对地平均比压 配重重量:165 t 最大提升力:2150 kN 最大提升速度:1.23 m/s 最大推压力:790 kN 最大推压速度:0.63 m/s 回转力矩:2845332 N·m 回转速度:2.40 r/min 履带最大牵引力:3750 kN 最大行走速度:1.73 km / h 挖掘循环周期(90°回转角):32 s 连续爬坡角度:7° 最大爬坡角度:12° 理论生产率:3030 m3 / h
挖掘机型号参数大全 质斗比是指挖掘机的质量与斗容之比。这个值显示了挖掘机的效率和工艺水准,一般来说,这个值越低挖掘机就越有效率。在同等质量情况下,这个值越低越好。相反的这个值越高,就越说明挖掘机的无效质量就越多,效率就越差。 制造商1制造商型号整机质量(kg) 标准斗容(m3) 标准斗容(m9) 质斗比 阿特拉斯Atlas 3306LC 31500 1.90 1.90 16579 阿特拉斯Atlas 2606LC 25000 1.50 1.50 16667 阿特拉斯Atlas 2006LC 18000 1.00 1.00 18000 阿特拉斯Atlas 2306LC 22000 1.20 1.20 18333 邦立重机Bonny CE400-6 40000 2.00 2.00 20000 邦立重机Bonny CE650-6 66000 4.00 4.00 16500 邦立重机Bonny CE1000-6 102000 6.00 6.00 17000 邦立重机Bonny CE460-5 46000 2.50 2.50 18400 邦立重机Bonny CE460-6 46000 2.50 2.50 18400 邦立重机Bonny CE400-5 39000 2.00 2.00 19500 邦立重机Bonny CE420-6 40000 1.80 1.80 22222 邦立重机Bonny CE220-6 23000 1.00 1.00 23000 斗山中国Doosan SL015 770 0.05 0.05 16383 斗山中国Doosan SL018-VT 770 0.04 0.04 19250 斗山中国Doosan DH225LC-7 21500 0.73~1.24 0.98 21939 斗山中国Doosan DH300LC-7 29600 1.30 1.30 22769 斗山中国Doosan DH258LC-7 24600 0.81~1.29 1.05 23429 斗山中国Doosan DH370LC-7 37500 1.20-2.01 1.60 23438 斗山中国Doosan SL035 2700 0.11 0.11 24545 斗山中国Doosan DH500LC-7 46900 0.93-2.86 1.90 24684 斗山中国Doosan DH220LC-7 21400 0.5~1.18 0.80 26750 斗山中国Doosan DH150LC-7 13900 0.28-0.75 0.51 27255 斗山中国Doosan DH80-7 7830 0.28 0.28 27964 斗山中国Doosan DH55-5 5250 0.18 0.18 29830 斗山中国Doosan DH300LC-7 29600 0.95 0.95 31158 斗山中国Doosan DH35 3240 0.10 0.10 32400 斗山中国Doosan DX300LC 29600 0.63~1.3 0.87 34023 斗山中国Doosan DH60-7 5500 0.13~0.2 0.16 34375 斗山中国Doosan DH420LC-7 41200 1.1.44~2.18 1.15 35826 斗山中国Doosan SL030 2700 0.07 0.07 36986 斗山中国Doosan SL010 770 0.02 0.02 38500 斗山中国Doosan DH55GOLD 5250 0.09-0.175 0.13 40385 福田雷沃LOVOL FR85-7 8500 0.36 0.36 23611 福田雷沃LOVOL FR65-7 6200 0.22 0.22 28182 福田雷沃LOVOL FR60-7 5730 0.20 0.20 28650 福田雷沃LOVOL FR39-7 3960 0.12 0.12 33000 福田雷沃LOVOL FR35-7 3980 0.12 0.12 33167 福田雷沃LOVOL FR230 23000 0.3-1.4 0.85 27059
液压挖掘机工作装置在ADAMS中的运动 仿真解析 姓名:XXX 部门:XXX 日期:XXX
液压挖掘机工作装置在ADAMS中的运动仿真解析虚拟样机技术在使用过程中为液压挖掘机设计提供了有效的方法 和手段,在使用过程中受到了条件限制,较少的单位会对运行学进行仿真研究,降低了色剂方案可行性。文章基于动力学仿真软件ADAMS建立起了挖掘机工作装置虚拟系统,更好的完成了前期处理工作,使得建模正确性更高。 液压缸顺序工作的运动仿真分析 1.1.基于尺寸确定 当液压的挖掘机工作装置尺寸以及基本结构都确定下来之后,该挖掘机的工作范围也基本确定下来。简单理解就是挖掘机铲斗齿尖轨迹的包络图得以确定。在包括图中,有些部分区间靠近的比较紧密,有的会深入到挖掘机停点底部下,这一个位置虽然还可以挖掘到,但是在挖掘过程中会引起土壤坍塌,从而影响机械运行稳定,使得施工安全性受到影响。在以上动臂液压缸、斗杆液压缸和铲斗液压缸运动仿真分析过程中,选择的挖掘机工作顺序和方式一般都是在装置范畴内,这里讲解的顺序指的是,挖掘工作进行时,各个油缸都是根据一定顺序进行收缩或者伸出。例如:挖掘进行时,需要先下降动动臂,再收回斗杆,这个动作完成之后,在使用铲斗进行挖掘。 1.2.顺序工作运动仿真实现的路线 仿真路线是,在斗杆液压缸、动臂液压缸、铲斗液压缸上进行设置,一般在不同的时间段内,它的运动驱动函数都不同,需要进行调节处理,使得各缸在相应的工作极限范围内相互运行,这样就可以获得挖掘机的工作范围。可以在液压缸移动副约束处添加移动驱动,改变运动方式, 第 2 页共 5 页
将其更换成位移运动方式。运动的函数输入时,需要注意相匹配的的STEP函数。对液压缸进行STEP函数值设置时,应该满足运动函数需求。当完成了函数值输入之后,在运行状态下可以启动ADAMS软件的仿真模块。 1.3.仿真过程 当工作面从最初的范围逐渐移动时,一般最初的指的是停机状态下。可以适当的对斗杆、铲斗液压缸进行调整,将其保持在全缩的状态中,逐渐对动臂液压缸拉伸,将其缩小到CD弧线上。这个伸缩过程需要得到弧线支撑,基于保障弧线运动轨迹基础上做好控制工作。其中在进行一次姿态调整之后,作业范围会缩小,而且包络图中的各个点会逐渐深入挖掘机的底部,在这个范围上可以实现挖掘,但是可能出现塌陷实现,导致机械无法正常施工。因此,一般除了有条件的挖沟作业之外进行使用,其他施工一般都不会使用。可以在模型中建立起一个处于回转中心轴的三维坐标,将坐标点确定为(608,.0,0.0,1254.3306),这样就可以测量出方向移动值,可以得出这个位置的位移,这样便可以达到最大高度值,其实这个测量方法比较简单,也比较容易掌握。根据曲线变化得出,从得到的曲线中得出最终的数值,可以查看到最大值,平均值以及最小值等。 工作装置模型的运动学仿真分析 2.1.参数范围 运动学仿真中的参数范围确定一般都包含速度、位移以及加速度,这些参数会有一个变化范围。在进行运动学仿真分析中,需要基于ADAMS/Solver求解,就可以得出代数方程。因此,在进行仿真系统自由度确认时,一般自由度的必须为零。如果这个时候会考虑到物体的惯性 第 3 页共 5 页
工程机械租赁合同书 甲方:内蒙古中鑫再生资源有限公司(承租方) 乙方:(承租方) 为了国家建设,根据工程需要,明确双方的权利和义务,经双方协商后签定如下租赁承包协议: 一、甲方自2009 年 8 月 27 日至 2009 年 10 月 27 日租赁乙方挖掘机 PC220-7 型 1 台,承包土石方,预期 2 月。 二、付款方式及工作时间: 1、乙方机械进场签合同,工作5日内甲方首付16500.00元整,其余款到月结清,每天租金为1100.00元整,甲方负责单程托运费300.00元整,本租金不含税收票据。工作时间不往下月累计。由于乙方的机械或司机原因造成的工时不足,按时扣费。 2、每月工作时间为 330 小时,每天工作时间 11 小时,超出时间按加班计算,加班费 100 元/小时,如遇下雨或因甲方原因出现停工致使工作时间街接不上照常算作工作日。 3、在租赁期间内,甲方未征的乙方同意,不得擅自在
所租设备上增加或拆除任何零部件。 三、甲乙双方责任 1、乙方机械进入甲方工地,甲方负责乙方施工人员的食宿,并共同负责机械的安全,保证工程完工后机械人员安全离场。 2、甲方只供柴油,其余付油由乙方负责。如油料不合格乙方有权拒绝使用,如甲方强行使用油料,造成机械损坏,应由甲方修理。如挖斗破损,由甲方协助乙方焊接好。 3、施工工地如甲方属于证照不健全、出现电缆、光缆、水道、军事设施等影响施工,导致乙方机械人员被有关部门扣留甲方负责协调。 4、如果出现甲方资金不能按合同付款,乙方有权停机,停机期间照算工作日,停机两天再不付款,乙方有权把机械拖走,造成的一切损失由甲方负责。 5、乙方机手应听从甲方工地人员的指挥和安排,认真工作,合理施工,不听甲方指挥人员的指挥,甲方有权解除合同,费用乙方自负。但甲方不得强行机手进行危险作业,否则乙方机手有权拒绝。 6、乙方应确保机械正常作业,圆满完成任务。 7、甲方应确保乙方每月有 2 天的维修保养机械时间。 8、由于乙方机械手违章作业不听指挥造成的事故一切
目录 摘要.......................................................... (1) 第一章绪论 (1) 1.1 小型挖掘机的进展现 状 (2) 1.2 小型挖掘机工作装置简介 (3) 第二章总体方案设计 (3) 2.1 工作装置构成及工作原理 (3) 2.2 工作装置坐标设定 (6) 2.3 工作装置各部分方案选择 (6) 2.3.1 动臂种类选择 (6) 2.3.2 动臂油缸布置方案选择 (8) 2.3.3 铲斗与铲斗油缸的连接方案选择 (8) 2.3.4 铲斗结构形式及斗齿的安装形
式 (8) 2.4 设计差不多参数以及设计作业范围 (9) 第三章工作装置运动学分析 (9) 3.1 动臂的运动分析 (9) 3.2 斗杆的运动分析 (11) 3.3 铲斗的运动分析 (12) 3.4 专门工作位置计算 (11) 3.4.1 最大挖掘半径 (11) 3.4.2 最大挖掘深度 (14) 3.4.3最大卸载高度 (15) 3.4.4 最大挖掘高度 (16) 3.5 工作范围包络图 (16) 第四章差不多尺寸的确定 (18)
4.1 斗形参数的选择 (18) 4.2 动臂机构参数的选择 (18) 4.3 斗杆机构差不多参数的选择 (20) 4.4 连杆机构差不多参数的选择 (21) 第五章工作装置结构受力分析与校核 (26) 5.1 挖掘阻力分析 (26) 5.1.1 铲斗挖掘切向阻力计算 (27) 5.1.2 斗齿侧向力分析 (28) 5.2 工作装置结构强度校核的工况介绍 (28) 5.2.1 斗杆结构强度校核的工况介绍 (28) 5.2.2 动臂结构强度校核的工况介绍 (29) 5.3 斗杆的力学分析 (29) 5.3.1 斗杆工况1受力计算及内力图的绘
第二章挖掘装置运动学及动力学分析 2.1 挖掘装置的结构及工作特点 挖掘装载机反铲工作装置的结构,其基本型式见图 2-1 所示。 图2-1反铲结构简图 工作特点:反铲工作装置主要用于挖掘停机面以下的土壤,其挖掘轨迹决定于各液压缸的运动及其相互配合的情况。当采用动臂液压缸工作进行挖掘时(斗杆、铲斗液压缸不工作可以得到最大的挖掘半径和最大的挖掘行程,此时铲斗的挖掘轨迹系以动臂下铰点 C 为中心,斗齿尖 V 至 C 的距离|CV|为半径而作的圆弧线,其极限挖掘高度和挖掘深度(不是最大挖掘深度,分别决定于动臂的最大上倾角和下倾角(动臂对水平线的夹角,也即决定于动臂液压缸的行程由于这种挖掘方式时间
长,并且稳定条件限制了挖掘力的发挥,实际工作中基本上不采用。 当仅以斗杆液压缸工作进行挖掘时,铲斗的挖掘轨迹系以动臂与斗杆的铰点 F 为中心,斗齿尖 V 至 F 的距离|FV|为半径所作的圆弧线,同样,弧线的长度与包角决定于斗杆液压缸的行程 。当动臂位于最大下倾角时,可以得到最大挖掘深度,并且有较大的挖掘行程,在较硬的土质条件下工作时,能够保证装满铲斗,故中小型挖掘机构在实际工作中常以斗杆挖掘进行工作。 反铲装置如果仅以铲斗液压缸工作进行挖掘时,挖掘轨迹则为以铲斗与斗杆的铰点 Q 为中心,该铰点 Q 至斗齿尖 V 的距离 |QV|为半径所作的圆弧线。同理,圆弧线的包角( 铲斗的转角及弧长决定于铲斗液压缸的行程(|GH|–|GH|)。显然,以铲斗液压缸进行挖掘时的挖掘行程较短,如使铲斗在挖掘行程结束时能够装满土壤,需要有较大的挖掘力以保证能够挖掘较大厚度的土壤。所以,一般挖掘机构的斗齿最大挖掘力都在采用铲斗液压缸工作时实现。用铲斗液压缸进行挖掘常用于清除障碍,挖掘较松软的土壤以提高生产率,因此在一般土方工程机械中(土壤多为Ⅲ级土以下,转斗挖掘最常采用。在实际挖掘中,往往需要采
编号:____________ 工程机械租赁合同书 甲方: __________________________ 乙方: __________________________ 签订日期: ____ 年____ 月_____ 日 甲方:(承租方) 乙方:(出租方) 为了国家建设,根据工程需要,明确双方的权利和义务,经双方协商后签定如下租赁承包协议:一、甲方自__________ 至____________ 租赁乙方______________________________ 。
二、租赁方式及租赁单价: 1、本租赁方式采用按月租赁的方式,甲方需在乙方机械场________ 天内支付一半租金,其余租金 在租赁到期时一次性付清。 2、美国卡特牌挖掘机: 3、在租赁期间内,甲方未征的乙方同意,不得擅自在所租设备上增加或拆除任何零部件,如有此行为,一切损失由乙方承担。 三、甲乙双方责任 1、乙方机械进入甲方工地,甲方负责乙方施工人员的食宿,并共同负责机械的安全,保证工程完工后机械人员安全离场。 2、甲方只供柴油,其余付油由乙方负责。如油料不合格乙方有权拒绝使用,如甲方强行使用油料,造成机械损坏,应由甲方修理。如挖斗破损,由甲方协助乙方焊接好。 3、施工工地如甲方属于证照不健全、出现电缆、光缆、水道、军事设施等影响施工,导致乙方机械人员被有关部门扣留,甲方负责协调。 4、如果出现甲方资金不能按合同付款,乙方有权停机,停机期间照算工作日,停机两天再不付款,乙方有权把机械拖走,造成的一切损失由甲方负责。 5、乙方机手应听从甲方工地人员的指挥和安排,认真工作,合理施工,不听甲方指挥人员的指挥,甲方有权解除合同,费用乙方自负。但甲方不得强行机手进行危险作业,否则乙方机手有权拒绝。 6、乙方应确保机械正常作业,圆满完成任务。 7、甲方应确保乙方每月有______ 天的维修、保养机械时间。 8、由于乙方机械手违章作业不听指挥造成的事故一切费用由乙方承担。 四、甲乙双方如发生纠纷,应在同等互利的原则下协商解决,如协商不妥,可在甲方当地仲裁委员会解决。 五、本合同未经公证处公证,但经双方签字后享有法律的同等效力。 六、本合同一式两份,双方各一份,双方签字后生效。 甲方签字: 地址: 电话:身份证号码:年月日地址: 乙方签字:
( 安全技术 ) 单位:_________________________ 姓名:_________________________ 日期:_________________________ 精品文档 / Word文档 / 文字可改 液压挖掘机工作装置在ADAMS中的运动仿真解析(2021版) Technical safety means that the pursuit of technology should also include ensuring that people make mistakes
液压挖掘机工作装置在ADAMS中的运动仿 真解析(2021版) 虚拟样机技术在使用过程中为液压挖掘机设计提供了有效的方法和手段,在使用过程中受到了条件限制,较少的单位会对运行学进行仿真研究,降低了色剂方案可行性。文章基于动力学仿真软件ADAMS建立起了挖掘机工作装置虚拟系统,更好的完成了前期处理工作,使得建模正确性更高。 液压缸顺序工作的运动仿真分析 1.1.基于尺寸确定 当液压的挖掘机工作装置尺寸以及基本结构都确定下来之后,该挖掘机的工作范围也基本确定下来。简单理解就是挖掘机铲斗齿尖轨迹的包络图得以确定。在包括图中,有些部分区间靠近的比较紧密,有的会深入到挖掘机停点底部下,这一个位置虽然还可以挖
掘到,但是在挖掘过程中会引起土壤坍塌,从而影响机械运行稳定,使得施工安全性受到影响。在以上动臂液压缸、斗杆液压缸和铲斗液压缸运动仿真分析过程中,选择的挖掘机工作顺序和方式一般都是在装置范畴内,这里讲解的顺序指的是,挖掘工作进行时,各个油缸都是根据一定顺序进行收缩或者伸出。例如:挖掘进行时,需要先下降动动臂,再收回斗杆,这个动作完成之后,在使用铲斗进行挖掘。 1.2.顺序工作运动仿真实现的路线 仿真路线是,在斗杆液压缸、动臂液压缸、铲斗液压缸上进行设置,一般在不同的时间段内,它的运动驱动函数都不同,需要进行调节处理,使得各缸在相应的工作极限范围内相互运行,这样就可以获得挖掘机的工作范围。可以在液压缸移动副约束处添加移动驱动,改变运动方式,将其更换成位移运动方式。运动的函数输入时,需要注意相匹配的的STEP函数。对液压缸进行STEP函数值设置时,应该满足运动函数需求。当完成了函数值输入之后,在运行状态下可以启动ADAMS软件的仿真模块。
工程机械(挖掘机工、装载机工)技术比武方案 一、组织机构 组长:杨安成 副组长:张芝季 成员:赵春波 杨忠学 领导小组下设协调组和评委组 协调组成员:卿大平 赵贤柱 郑世黔 戴朝忠龙喜 孙祥林 郑元友 刘志友 马家明 评委组长:马启华 评委成员:欧阳范刚 徐昌迪 张池平 二、比武方式 技术比武包括理论知识考试和实际操作考试两部分,理论考试 统一一套试题,实际操作挖掘机工和装载机工各一套操作试题。理 各占50%计入综合成绩确定最后的名次。 (-)参赛选手范围:集团公司所属各单位的挖掘机工和装载机 工。 (二)参赛知识范围:以《冶金职业技能鉴走》和《职业技能鉴 定》为依据。高级工技能题量占50% ,技师及其以上技能题量占 张应全 殷昭和 陈刚 梁恩炳张潮周宝国 唐晓武 论成绩前12名进入后 的实际操作考试。理论知识和实际操作考试 参赛范
50%o 四、比武内容 (-)理论考试部分 理论知识考试采用闭卷笔试的方法,满分100分,考试时间120分钟,考试内容包括: 1、基础知识 概述、总体结构及构造、用途、分类。 1.2挖掘机、装载机的工作装置、类别、工作原理、组成及作用。 1.3挖掘机的回转装置。 1.4行走装置。 1.5发动机的工作原理及基本结构。 1?5丄概述。 1.5.2基本术语。 1.53发动机工作原理。 1.5.4发动机的基本结构。 1.6液压系统、液压原理的基本油路,主要液压系统及功能。 1.7电气系统基础知识,主要电气设备的基本原理及电路与控制电路。 2、专业知识 2?1挖掘机、装载机的操作与施工。 2丄1挖机、铲车的控制与操作。
第五章挖掘机械 第一节概述 一、用途 挖掘机学是用来进行土、石方开挖的一种工程机械,按作业特点分为周期性作业式和连续性作业式两种,前者为单斗挖掘机,后者为躲斗挖掘机。由于单斗挖掘机是挖掘机械的一个主要机种,也是各类工程施工中普遍使用的机械,可以挖掘VI级以下的土层和爆破后的岩层,因此,本章着重介绍单斗挖掘机。 但都挖掘机的主要用途是:在筑路工程中用来开挖堑壕,在建筑工程中用来开挖基础,在水利工程中用来开挖沟渠、运河和疏通河道,在采石场、露天采矿等工程中用于矿石的剥离和挖掘等;此外还可对碎石、煤等疏松物料进行装载作业;更换工作装置后还可以进行起重、浇筑、安装、打桩、夯土和拔桩等工作。 二、分类及表示方 单斗挖掘机可以按一下几个方面来分类: (1)安动力装置分为电驱动式、内燃机驱动式、复合驱动式等: (2)按传动装置分为机械传动式、半液压传动式、全液压传动式; (3)按行走机构分为履带式、轮胎式、汽车式; (4)按照工作装置在水平面可回转的范围分为全回转式(360°)和非回转式(270°)。 挖掘机的类代号用字母W表示,主参数为整机的机重。如WL Y表示轮胎式液压挖掘机,WY100表示机重为10t的履带式液压挖掘机。不同厂家,挖掘机的代号表示方法各不相同。 三、挖掘机械的工作过程 单斗挖掘机的工作装置主要有正铲、反铲、拉铲和抓斗等形式(图5-1),它们都属于循环作业式机械。每个工作循环包括挖掘、回转、卸料和返回四个过程。 (一)机械式单斗内挖掘机的工作过程 正铲挖掘机(图5-2)的工作装置由动臂2、斗杆5和铲斗1组成。 正铲的工作过程为 (1)挖掘过程:先将铲斗放下到工作面底部(Ⅰ),然后提升铲斗,同时使斗杆向前推压(有的小型挖掘机依靠动臂下降的重力来施压),完成挖掘(Ⅱ→Ⅲ)。 (2)回转过程:先将铲斗向后退出工作面(Ⅳ),然后回转,使动臂带着铲斗转到卸料的位置(Ⅴ)。同时可适当调整斗的伸出度和高度适应卸料要求,以提高工效。 (3)卸料过程:开启斗底卸料(Ⅵ)。 (4)返回过程:回转挖掘机转台,使动臂带着控斗返回挖掘面,同时放下铲斗,斗底在惯性最用下自动关闭(Ⅵ→Ⅰ)。 机械传动式正铲挖掘机适宜挖掘和装载停机面以上的Ⅰ~Ⅳ级土壤和松散物料。 机械传动的反铲挖掘机(图5-3)的工作装置由动臂5、斗杆4和铲斗2组成。动臂由前支架7支持。 反铲的工作过程为: (1)先将铲斗向前伸出,让动臂带着铲斗落在工作面上(Ⅰ) (2)先将斗向着挖掘机方向拉转,于是它就在动臂和铲斗等重力以及牵引索的拉力作用下完成挖掘(Ⅱ)。 (3)将铲斗保持Ⅱ所示状态连同动臂一起提升到Ⅲ所示状态,再回转至卸料处进行卸料。 反铲有斗底可开启式(Ⅵ)与不可开启式(Ⅴ)两种。
工程机械(装载机、挖掘机)租赁合同承租方:(以下简称乙方) 出租方:(以下简称甲方) 根据合同法的有关规定,按照平等互利的原则,为明确甲、乙双方的权利义务,经双方协商一致,特签订本合同。 一、设备的使用地点及工程情况 二、租赁设备概况 设备名称: 规格型号: 数量(台): 随机人员(人数): 机手补助: 租赁金额: 三、设备的所有权 本合同所列的所有租赁设备的所有权属于出租方,承租方对租赁设备机械只享受租赁期间的使用权,没有对设备的转租权。承租方不得以任何理由对设备进行抵押,否则造成的全部后果由承租方承担。 四、甲方的基本责任
1.提供技术型良好的设备。 2.设备进入乙方施工现场后,甲方机手服从乙方施工管理人员的高度与指挥,并遵守乙方施工现场的规章制度。 3.甲方机手应该按照设备操作规程施工。 五、乙方的基本职责 1.为甲方机手提供食宿。 2.乙方负责设备在施工现场的看护并保证设备、人员的安全。由乙方原因造成的设备损坏或丢失,由乙方负责赔偿。 3.乙方不得强迫甲方机手违章作业和超负荷作业。 4.乙方在交货地点检查验收租赁机械设备,同时将签收盖章后的机械租赁收据交给甲方。 5.乙方对甲方进入施工现场的机手要进行安全培训。 六、结算方式及相关事宜 1.租赁期间:自年月日至年月日,开始计算租金。如乙方提交使用,则从使用日期开始计算租金,租赁期满,乙方将设备交给甲方后,办理退场手续。如乙方继续租用需签订续租合同,续租不足一个月时,租赁费按实际天数计算。 2.结算方式:设备租赁费按包月计算,首月万元/月,次月万元/月,第三月万元/月,第四月万元/月,第五月
万元/月,第六月万元/月,第七月万元/月,第八月 万元/月,乙方在甲方确认设备后向甲方支付首月租金万元,并且完全支付进场和返程押金万元,到期末付租金,甲方有权停机或将设备撤场,所造成的的损失由乙方承担。本设备按月计算。如使用不足一个月,按整月计算。超过一个月,超出部分按天计算( 元/天)。 3.运费的承担:设备的进场费用由乙方承担,退场费用由甲方承担。如租期不足三月,则退场费用由乙方承担,乙方应在备的退场前五日内通知甲方。 4.工作时间:每月工作时间不得超过小时,超出部分按小时折合一天计算机械租金和机手加班费。 5.油料提供:乙方负责提供在租赁期间内设备运行所需的符合运行标准的油料,否则造成的停机损失由乙方承担。 6.设备维修:乙方应协助甲方机手做好设备的维修工作,所付的维修费用以甲方机手签字为准,每月每台维修费超过元以上的部分由甲方承担,元以下的部分由乙方承担。另乙方承担斗齿、滤芯等低值易耗品的费用。 7.设备因故障造成的停工每月累计不超过天(维修时累计小时折合成一天),若超出三天,则超出的天数不计租赁费。 8.设备租赁期间,乙方如需转移工地施工,必须征得甲方书面同
挖掘机液压工作运动分析 专业:自动化 班级:T1123-5 学号:20110230534 姓名:王光辉
挖掘机的工作特点及机械与液压的基本原理分析 一.挖掘机的工作机构 机构如图所示: 挖掘机的组成和工作原理 (1)组成 发动机:柴油机,提供动力; 底盘:包括离合器,变速器,后桥行走装置和机架,支撑整机质量和将动力传给行走机构的液压操作机构; 机架:整机的骨架,使整机成为整体。 电气系统:包括发动机的电启动部分,照明系统,控制系统和发电机等。 (2)工作原理 启动柴油机(主离合器)→变速器→中央传动系统→左右转向离合器→左右最终传动装置→行走机构,左右驱动轮→履带操纵系统→操纵挖斗工作 二.挖斗的运动过程分析 1.挖掘—通过对铲斗,斗杆及它们的复合动作,实现铲斗的破土和装土。 2.满斗回转—铲斗装满土后,动臂提升,同时进行平台回转到卸土位置。
3.卸土—平台回转到位后制动,由斗杆调节卸土半径,铲斗翻转卸土。 4.回位—铲斗卸土,转台反转,动臂,斗杆配合,回到挖掘位置 三.课堂中所包含的挖掘机的机械与液压 机构图如下: 挖掘机机械与液压包括:液压变力矩,联轴器总成,行星齿轮式动力换挡变速器,中央传动,转向离合和转向制动器,终转动和行走系统,挖斗的控制系统等。 图中的机构图中包含: 1.挖掘机的机械部分 平面连杆机构:挖掘机的工作离不开平面连杆机构,图中的斗杆与机械臂,连杆与铲斗液压杆和摇臂等都是构成连杆机构。 凸轮机构:当发动机工作时,曲轴通过齿轮驱动凸轮轴旋转的那个凸轮轴转到凸轮突起部分顶起挺杆时,通过推杆和调整器螺丝使摇臂绕摇臂轴转动,压缩气门弹簧, 压下气门使其开启。而后,气门变回在弹簧的张力作用下而使气门关闭。 2.联接: (1).螺纹联接:挖掘机的各个部分都是通过螺纹精密联接的,各个工作部件都是可以拆分的,使得检修方便。 (2).键连接:在发动机的飞轮上,采用了键的联接,此种联接方式简单,工作的可靠性较高,拆装方便。 (3).铆接:挖掘机的驾驶舱是采用铁皮铆接而成的,此种联接方式为不可拆联接,其特点是精密性好,为驾驶员提供了较好的工作环境。 (4)焊接:焊接在挖掘机的上面运用极其广泛,一些大的不能一次成型的部件就是采用焊接的方式进行制造的,其中有缝焊接和角焊接两种。
厂家名称及主要工程机械产品 美国 卡特匹勒公司(Caterpillar) 推土机、铲运机、装载机、300和325系列挖掘机、平地机、滩铺机、搅拌机,压实机械 阿里斯公司(Allis) 推土机、铲运机、平地机、 约翰.迪尔(John! .Deere) 推土机、装载机、铲运机、平地机 德莱赛公司(Dresser) 推土机、装载机、平地机、压路机、凿岩机械 凯斯公司(Case) 推土机、装载机、挖掘机 特雷克斯公司(Terex) 铲运机等 格鲁夫公司(Grove) 起重机等 英格索兰(Ingersoll-Rand) 压实机械、凿岩机械、空压机等 日本 小松制作所(Komatsu) 挖掘机、推土机、铲运机、平地机等 三菱重工业公司装载机、挖掘机、平地机、滩铺机、拌和机、铣削机 川崎重工业公司装载机等 古河矿业公司(Furukawa) 装载机、凿岩机械等 日立建机有限公司EX系列挖掘机等 久保田公司X系列挖掘机 神户制钢所装载机、起重机等 新卡特匹勒一三菱公司装载机、推土机、铲运机等 多田野公司起重机等 德国 利伯赫尔公司(Liebherr) 挖掘机、推土机、装载机、起重机等 O&K(奥轮斯坦.科佩尔) 挖掘机、装载机、平地机 德马克公司(Demag) H系列挖掘机、起重机、滩浦机等 哈诺马克(Hanomag) 推土机、装载机等 克虏伯(Krupp) 起重机、挖掘机、凿岩机械等 宝马公司(Bomag) 压实机械等 英 JCB公司装载机、平地机等 法 波克兰公司(Poclain) 挖掘机等 捷 ZTS集团装载机等
意 菲亚特.阿里斯Fiat.allis 装载机等 荷 VME集团装载机 韩 大宇重工业公司DH系列挖掘机、装载机、推土机 三星重工业公司履带式装载机、平地机、专用起重机、推土机、压路机现代重工业公司挖掘机等 瑞典 沃尔沃建机 阿特拉斯科普柯
挖掘机实训报告 1 2020年4月19日
实习单位简介 邯郸市亚盛中等专业学校是由邯郸市亚盛工程机械有限公司独资筹建,经邯郸市教育局批准成立、河北省教育厅备案的一所综合性全日制中等职业学校。开设专业有旅游服务、服装裁剪与设计、珠宝鉴定(与北京中教动力国际文化交流中心联办)、机电一体化、机械加工、数控技术、焊接技术。 “近水楼台”的优势使亚盛公司成为了我校第一级实训和就业单位,到当前为止,为亚盛公司培养的近200名员工在本校就读。借助亚盛公司广泛的社会影响,我校还与上海龙工集团、青岛特汽集团、北京精海仪有限公司、天津热工有限公司、邯郸市内燃机厂、邯郸市发达集团、邯郸市恒瑞冶金材料有限公司、邯郸市民生经贸有限公司、邯郸市熙平物流公司、邯郸市华夏长城环境工程有限公司、海后机修厂、邯郸市红宝石有限公司、邯郸市碧海舟锅炉制造有限公司等多家企业建立了良好的合作关系,成为了我校第二级实习和就业单位。 学校副教授级教师3人、中级职称教师5人,其中有参加过全国第一台联合收割机设计的机械专家,有邯郸市压力容器焊接比赛第一名获得者的焊接专家等。 邯郸市亚盛中等专业学校是河北省中小企业职业技能鉴定工作分站,可作5大类、180余个工种的初、中、高级职业资格鉴定,由 2 2020年4月19日
农业部劳动人事司颁发资格证书。邯郸市亚盛中等专业学校是邯郸市复兴区中小企业人才教育培训基地和创业辅导中心。 一、实习目的 经过接触和参加实际工作,充实和扩大自己的知识面,培养综合应用的能力,为以 后课程以及日后走上工作岗位打下基础。 二、实习内容 当你坐在驾驶室的时候,你左手那个操作杆是用来控制挖机的小臂和转的,往左是开小臂,往右是收;往前是向右转,往左是左转;然后是右边的那个操作杆了,眼睛看着前面!这个操作杆是用来控制挖斗和大臂的,往左是开斗,往右是收,往前是降大臂,往后是抬大臂;然后就是行走了,当驱动轮在前的时候你往前推就是后退,往后拉就是前进,驱动轮在后的话相反就好了! 范例装沙: 1、学员要按教练的示范动作装砂,掌握挖砂、甩方的基本动作要领。 2、学员动作操作一定要做规范,注意二臂是否收到规范位置、铲斗是否端平、是否将沙土甩到最远位置,动作不要求太快,应以动作规范为准则。 3 2020年4月19日
工程机械(装载机、挖掘机)租赁合同 承租方:(以下简称乙方) 出租方:(以下简称甲方) 根据合同法的有关规定,按照平等互利的原则,为明确甲、乙双方的权利义务,经双方协商一致,特签订本合同。 一、设备的使用地点及工程情况 二、租赁设备概况 设备名称: 规格型号: 数量(台): 随机人员(人数): 机手补助: 租赁金额: 三、设备的所有权 本合同所列的所有租赁设备的所有权属于出租方,承租方对租赁设备机械只享受租赁期间的使用权,没有对设备的转租权。承租方不
得以任何理由对设备进行抵押,否则造成的全部后果由承租方承担。 四、甲方的基本责任 1.提供技术型良好的设备。 2.设备进入乙方施工现场后,甲方机手服从乙方施工管理人员的高度与指挥,并遵守乙方施工现场的规章制度。 3.甲方机手应该按照设备操作规程施工。 五、乙方的基本职责 1.为甲方机手提供食宿。 2.乙方负责设备在施工现场的看护并保证设备、人员的安全。由乙方原因造成的设备损坏或丢失,由乙方负责赔偿。 3.乙方不得强迫甲方机手违章作业和超负荷作业。 4.乙方在交货地点检查验收租赁机械设备,同时将签收盖章后的机械租赁收据交给甲方。 5.乙方对甲方进入施工现场的机手要进行安全培训。 六、结算方式及相关事宜 1.租赁期间:自年月日至年月 日,开始计算租金。如乙方提交使用,则从使用日期开始计算租金,租赁期满,乙方将设备交给甲方后,办理退场手续。如乙方继续租用
需签订续租合同,续租不足一个月时,租赁费按实际天数计算。 2.结算方式:设备租赁费按包月计算,首月万元/月,次月万元/月,第三月万元/月,第四月万元/月,第五月万元/月,第六月万元/月,第七月万元/月,第八月万元/月,乙方在甲方确认设备后向甲方支付首月租金万元,并且完全支付进场和返程押金万元,到期末付租金,甲方有权停机或将设备撤场,所造成的的损失由乙方承担。本设备按月计算。如使用不足一个月,按整月计算。超过一个月,超出部分按天计算( 元/天)。 3.运费的承担:设备的进场费用由乙方承担,退场费用由甲方承担。如租期不足三月,则退场费用由乙方承担,乙方应在备的退场前五日内通知甲方。 4.工作时间:每月工作时间不得超过小时,超出部分按小时折合一天计算机械租金和机手加班费。 5.油料提供:乙方负责提供在租赁期间内设备运行所需的符合运行标准的油料,否则造成的停机损失由乙方承担。 6.设备维修:乙方应协助甲方机手做好设备的维修工作,所付的维修费用以甲方机手签字为准,每月每台维修费超过元以上的部分由甲方承担,元以下的部分由乙方承担。另乙方承担斗齿、滤芯等低值易耗品的费用。
日立挖掘机60价格及基本参数 编辑:https://www.doczj.com/doc/0715858864.html, 挖掘机代理商信息网,找日立挖掘机各地区代理商上挖掘机代理商信息网 日立60挖掘机价格 日立60挖掘机价格每个省不同,这个还涉及到付款条件,这个要当地代理商报价 日立60挖掘机价基本参数 介绍
产品特点: ZX60是日立6吨小型挖掘机,也是日立系列挖机中的经典机型之一。标配铲斗斗容0.22方,比较适合管线的挖掘,边坡的修整,以及农林等行业的小型施工。 规格 整机工作重量(kg) 纠错:5850 铲斗容量(m3) 纠错:0.22 动臂长度(mm) 纠错:3.49 斗杆长度(mm) 纠错:1.6(补强版) 原产地 纠错:安徽合肥 性能 接地比压(Kpa) 纠错:33 回转速度(rpm) 纠错:9.3 行走速度(Km/h) 纠错:2.5/4.5 爬坡能力(%) 纠错:70/35° 铲斗挖掘力(kN) 纠错:41.4 斗杆挖掘力(kN) 纠错:28.4 发动机 发动机型号 纠错:五十铃ISUZU CC-4JG1 额定功率(Kw/rpm)
纠错:40.5/2100 总排量(行程总容积)(L) 纠错:3.059 气缸数 纠错:4 缸径×行程(mm×mm) 纠错: 冷却方式 纠错:水冷 备注 纠错:直喷 液压系统 主泵类型 纠错:变量柱塞泵×2+齿轮泵×2 主溢流设定压力(Mpa) 纠错:24.5 主泵最大流量(L/min) 纠错: 行走液压马达型式 纠错:变量斜盘式柱塞马达×2 回转液压马达型式 纠错:轴向柱塞马达×1 工作液压油路(Mpa) 纠错: 行走液压回路(Mpa) 纠错: 回转液压回路(Mpa) 纠错: 控制液压回路(Mpa) 纠错: 先导油路(MPa) 纠错: 动臂油缸-个数×缸径×行程(mm) 纠错: 斗杆油缸-个数×缸径×行程(mm) 纠错: 铲斗油缸-个数×缸径×行程(mm) 纠错:
沃尔沃挖掘机型号大全 1、EC140B Prime性能参数(0.5-0.93m3) EC140B Prime 性能参数 发动机Volvo D4D 额定功率转速35 r/s (2 100 r/min) ISO 9249/SAE J1349 net 69 kW (94 metric hp) 挖掘力87.3 kN 铲斗容积0.55 - 0.93 m3 最大挖掘距离8.8 m 最大挖掘深度 6.0 m 底盘处的举升能力 3.9 t 举升距离/高度 6.0 / 1.5 m 运行重量13.4 - 15.6 t
EC210B 性能参数 发动机Volvo D6D 额定功率. r/s (r/min) 32 (1 900) ...ISO 9249/DIN 6271. kW (hp) 107 (143) 铲斗容积. m30.75 – 1.55 最大挖掘距离. m 9.9 底盘处的举升能力. t 6.6 – 7.1 举升距离/高度. m 6.0 / 1.5 运行重量. t 20.9 – 22.3 挖掘力 SAE. kN 130.4 挖掘力 ISO. kN 147.1
EC210B Prime 性能参数 发动机Volvo D6E 额定功率转速30 r/s (1 800 r/min) ISO 9249/SAE J1349 net 110 kW (150 metric hp) 挖掘力130.4 kN 铲斗容积0.92 m3 最大挖掘距离9.9 m 最大挖掘深度 6.7 m 底盘处的举升能力7.0 t 举升距离/高度 6.0 / 1.5 m 运行重量20.4-23.7 t
EC290B 性能参数 发动机Volvo D7D 额定功率. r/s (r/min) 32 (1 900) ...ISO 9249/DIN 6271. kW (hp) 143 (192) 铲斗容积. m30.95-2.1 最大挖掘距离. m 10.7 最大挖掘深度. m 7.3 底盘处的举升能力. t 10.8 举升距离/高度. m 6.0 / 1.5 运行重量. t 28.5-30.0 挖掘力 SAE. kN 172.6 挖掘力 ISO. kN 198.4
2020-2021年 工程机械之挖掘机行业专题报告
目录 核心观点及市场若干争论点的解释 复盘:两轮周期的差异表现 探析:两轮周期差异背后的原因 展望:未来挖机行业怎么走? 投资策略——聚焦龙头
? 一、核心观点及市场争论点解释 核心观点及市场争论点解释 核心观点 市场争论点的解释
?1.1 核心观点 前言:之所以聚焦挖机专题,是因为在国内外挖掘机均是工程机械价值量第一的品类,研究清楚 挖机,对于探究龙头企业业绩增长意义重大。通过更换不同的附属装置,挖掘机可以兼有推土机 、装载机、起重机等功能,对其他工程机械和人工均有一定替代性,65%-70%的土石方作业是由挖 掘机完成的。 ◆时过境迁,对比前后两轮挖机行业的高潮期,其行业生态发生了本质性变化。 1.从行业层面表现来看:①本轮复苏周期持续时间更久,且景气度仍在延续;②吨位结构方面 向两头发展(小挖、大挖),中挖销售绝对量及品类占比均在萎缩;③三一、徐工等国内龙头企业领衔国产替代,国产品牌已然崛起。 2.从企业股价表现来看:本轮复苏周期整机龙头与零部件龙头α效应显著,高业绩支撑下三一 重工、恒立液压等企业超额收益明显。 ◆探析原因,我们认为两轮上行周期差异化的表现主要系需求结构、客户结构及竞争生态不同 所致:①需求结构的变化影响行业韧性与产品吨位结构;②客户结构的变化影响行业竞争格局与长期行业有序发展;③竞争生态的转变驱动龙头企业在市场竞争中强者恒强。 ◆展望未来,挖机行业仍有望不俗表现,龙头企业α属性进一步凸显。政策托底&机器换人带来 的新增需求+国产机全球化加速带来的出口需求+使用寿命&环保趋严带来的更新需求,2020年挖机行业有望保持个位数以上正增长,龙头企业则依靠创新驱动,建立更深的品牌护城河,蓄力上行。 ◆投资策略:聚焦龙头企业,坚定看好挖机板块核心标的,挖机龙头企业三一重工、挖机核心零 部件液压件龙头企业恒立液压、挖机属具破碎锤龙头艾迪精密(备注:从工程机械整体行业角度来讲,我们也坚定看好徐工机械和中联重科,但由于徐工机械挖机不在上市公司体内,中联重科收入来源主要系起重机和混凝土机械,挖机占比仍较少,本篇报告聚焦挖机行业分析,在此先不做讨论) ◆风险提示:宏观经济大幅下滑;基建补短板不及预期;海外市场拓展不及预期,市场竞争加剧