
0引言
在交通流的视频检测中,运动车辆的检测和跟踪是一个重要的研究领域,跟踪的过程其实就是在图像序列中目标匹配的过程,通常的匹配准则包括图像的轮廓、重心、面积、不变矩、Hausdorff距离等形态特征和数学特征[1-2]。
由于系统实时性和鲁棒性的要求,一般都采用运动车辆的特征匹配进行跟踪,在获得好的目标特征前,必须精确的提取出运动车辆。
由于背景图像的动态变化,如天气、光照等干扰因素的影响,使得运动车辆的检测变得非常复杂。前人已经对背景模型的建立作了大量的研究,提出了许多背景消除算法:其中有基于统计模型的方法,如高斯分布模型[3-4]、混合高斯分布模型[5,7]、非参数化模型[6]等;基于预测的方法,如卡尔曼滤波[8]方法等。
由于实际场景的复杂性,这些算法都存在一些问题,为了适用于本系统实时性的要求,减少算法的计算量,本文只采集背景的亮度空间进行背景建模,描述像素点的统计特征,对背景模型及时进行更新。1背景建模和车辆特征采集
1.1混合高斯分布模型原理
本文使用混合高斯分布模型来表征图像帧中每一个像素点的特征,为了克服特征跟踪中图像受周围环境(如建筑阴影、路灯),路面的反射、阴影,下雨、下雪等天气变化的影响,提供一种实时性强、处理速度快、适应环境变化的改进的自适应混合高斯模型,仅使用协方差矩阵中的亮度分量,因为噪声的干扰对色度信息影响比较大,而对亮度信息影响比较小,牺牲色度信息,整个交通流信息检测系统的实时性大大提高,却对目标提取的影响不大。
1.2建模过程
以下所叙述的每一个像素处理都是在一系列固定摄像机下,从高分辨率CCD摄像机取得R、G、B颜色空间图像序列(当然包括噪声信号),用中值滤波对图像滤波除噪。对处理过的图像序列进行颜色空间的转化,将R、G、B颜色空间转化成亮度空间,
即
+/3。
输入视频图像序列{1,2,…,??êó?μí????D£?′|àíμú的值,
其中第
-1582-
-1583
-
,
=
1
2
1/2
当前像素点
,1
,
(决定了背景分布模型个数)
一般取经验值一般取范围[0.01,0.001]之间,
我们这里取的一般取
值范围[3,5],
=4,
初始化权重
=0.05。
读取图像的亮度空间,将第一帧图像每一个像素点的亮度值作为混合高斯的均值,
方差给一个较
=,1
+
=1如果∣=0其它可能
(2)
式中:取值比较大,适应环境变化的能力
比较强,改变的背景很快的融入到背景模型中,但容易受噪声
影响。如果
,
则其面积
=
?úμ??ùóDμ?£??éò?í¨1y???????ˉ??óò
μ????y?D?μ£?à′?D?????ˉ??±êê?·?ê?·?3μá?μè?éè?òò??£?í¨1y?D?????ˉ3μá?μ??í?è£??ì2a??μt3μá??£
2
基于相似性算子的跟踪
2.1
联合的相似性算子
当车辆重叠或者运动速度过快的时候,对目标的数学特
征进行匹配,能有效的提高跟踪的精度。
相邻两帧+1帧,第
个目标的重心位置相
似度为
,
=
+1
=1/
,
=1/
,
+1
=1/
,
+
1
+1
=1/
,+
1
+1
+1
+1
oí????±êoí
μú
,=
,1,+,1,
=
,2
,+
,2,
+1,1,1
+1,1,1
+1,1,
+1,2
,2
+1,2
,2
+1,2
,
是目标左上角的相似度,
,是目标右下角的相似度,g
,2
是正的参数,当两个目标有相
同的最小外接矩形时,分别达到大值1/g
,2
。
相邻两帧+1,第
个目标的灰度和方差的
相似度为
,=
,
+,
=
+1
+1
是一个正的常
数,当两个目标有相同的灰度均值和方差的时候,达到其最大
值1/g
,
,
,
,
,
,
2.2多运动车辆的匹配
匹配情况:对于
个目标,如果能搜索到使相似
度算子取得最大值的
,,
≥
(是相似度算子门限值),则目标i 和j 是同一个目标。
目标驶出:对于个目标,如果能搜索到使相似
度算子取得最大值的
,,
<,
则在+1帧中出现的目标
帧中没有出现的
话,即出现了新目标,采集如上部分内容所介绍的各种参数,
保存在结构体中。如图2所示,是目标跟踪和匹配的过程。
图2(a )中出现两个新目标,
建立两个特征向量组
和
。图2(b )中又出现了一个新目标,建立3
个特征向量组
、
、
,使用相似性算子对图2(a )和(b )
目标的特征
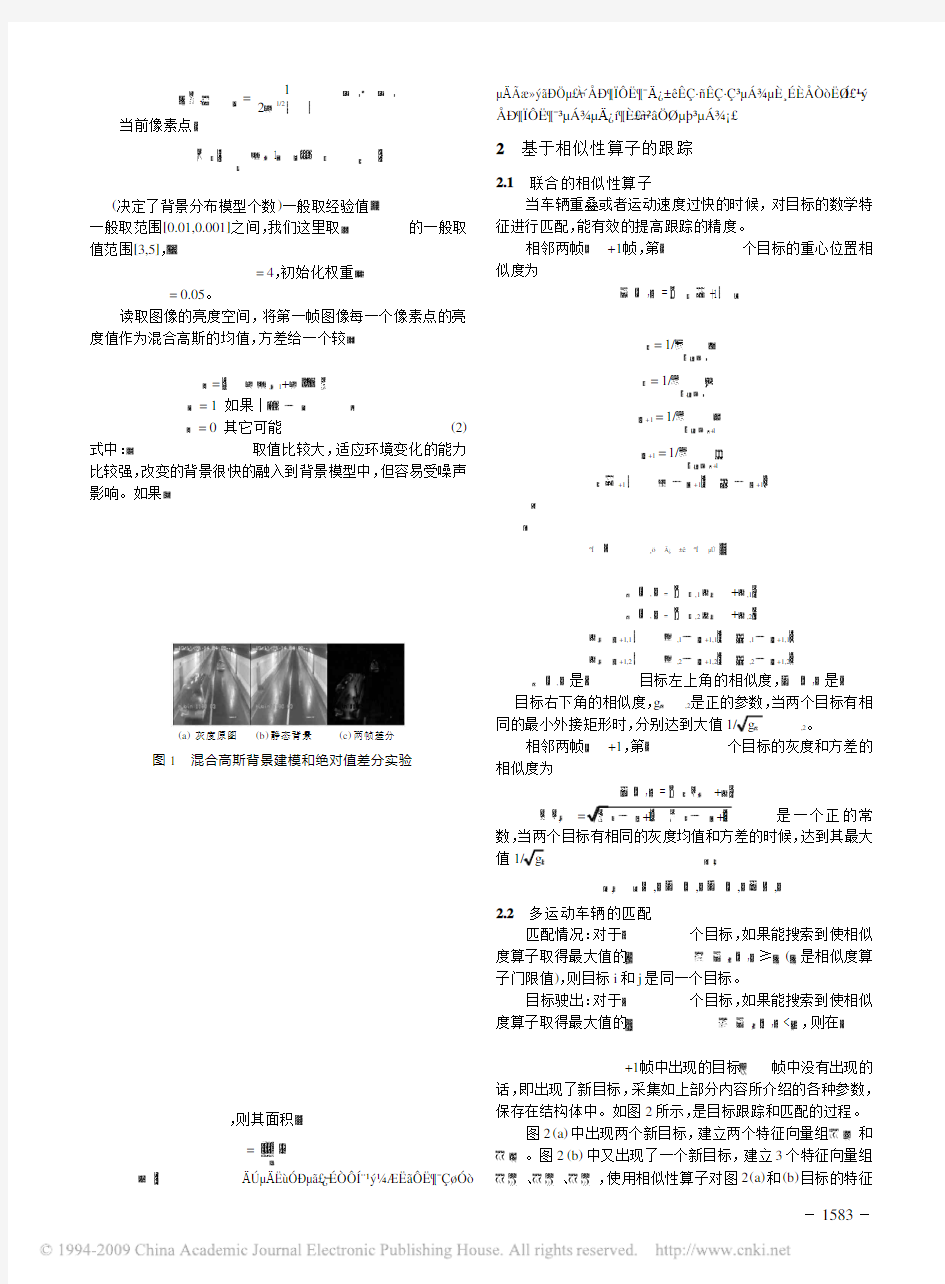
图1混合高斯背景建模和绝对值差分实验
(a )灰度原图
(b )静态背景
(c )两帧差分
-1584-
向量进行匹配,
可以发现
是新出现的目标,计数器加1,并根据两帧的间隔时间和实际距离计算速度,
并用特征向量
、
分别代替
、
。
图2(c )中,已经有一个目标消失在监控视频范围之内,找不到其匹配的特征值。
如果图像序列中出现如行人、垃圾三轮车(如马路出现的环卫工人),一个很简单的办法就是采用面积阈值算法,设定一个面积阈值,面积小于此阈值的区域将会被过滤掉,只有面积大于此阈值的区域才被认为是运动目标区域(一般来说,城市交通中出现的非车辆目标不会大于车辆的面积阈值)。
3结束语
本算法在西湖隧道光照变化剧烈和龙井之路下雨的情况
下进行检测,车辆的检测精度达90%左右,如果没有这些干扰,在天气良好的状况下,试验显示本算法检测的精度能达到92%以上。两个路段检测结果与实际结果的对比如图3所示。
本算法在英特尔公司的开源计算机视觉库OpenCV 上实现,可以轻松实现物体轮廓跟踪、背景消除等。由于OpenCV 是基于Intel 处理器指令集开发的优化代码,在奔腾42.4G 的PC 机上运行本检测算法,每秒种可处理17帧的灰度图像,大大提高了算法的实时性,得到良好的处理结果。
参考文献:
[1]
翁木云,何明一.图像综合特征及其在图像检测与匹配中的应用[J ].中国图象图形学报,2007,12(1):121-126.
[2]艾金慰,刘克.视频序列中运动目标跟踪新方法[J ].北京科技大学学报,2006,28(2):195-198.
[3]
Huwer S,Niemann H.Adaptive change detection for real-time surveillance applicatications [C ].Proceedings 3rd IEEE Interna-tional Workshop on Visual Surveillance.Dublin:IEEE Computer Society Press,2000:37-46.
[4]Harville M,Gordon G,Woodfill J.Foreground segmentation using adaptive mixture models in color and depth [C ].Procee-dings of the IEEE Workshop on Detection and Recognition of Events in Video.Vancouver:Canadu,2001:3-11.
[5]
Stauffer C,Grimson W E L.Adaptive background mixture mo-dels for real-time tracking [C ].IEEE Conf on CVPR,1999:246-252.
[6]Elgammal A,Harwood D,Davis.Nonparametric model for back-ground subtraction [C ].Dublin Ireland:Proceedings of the 6th European Conference on Computer Vision,2000:751-767.
[7]Gordon G,Darrel T,Harville M,et al.Background estimation and removal based on range and color [C ].IEEE Conf on CVPR,1999:459-464.
[8]Corvee E,Velastin S,Jones G A.Occlusion tolerent tracking using hybrid prediction schemes [J ].ACTA Automatica SINICA,2003,29:356-368.
(上接第1581页
)
图2多运动目标的检测与跟踪
(a )目标出现
(b )目标匹配
(c )目标消失
图3
两个路段的检测结果对比
时刻
检测结果A;实际值A 检测结果B;
实际值B
0:00
0:10
0:20
0:300:40
0:500:60
200
150100500
车辆数/辆
-
-
-
---最终形成钢种为Q235B ,规格为16mm 的CEQ 在0.235%~0.259%范围内专家知识库。
3结束语
(1)本文研究采用MAS 开发中厚钢板质量评估与改进专
家系统,建立包含由2层、3个协同Agent 组成的开发模型,并且各个Agent 均具有感知→推理→响应的功能,能自动地感知环境变化,给出合理的决策。
(2)系统采用B/S 开发,在某钢铁集团现场应用表明,该系统指导现场生产,及时帮助分析中厚钢板质量问题。
参考文献:
[1]毛新军,赵建民,王怀民.多Agent 系统的抽象合作模型[J ].计算机研究与发展,2004,41(5):787-795.
[2]
毛新军,陈火旺,刘凤歧.Muti-Agent 系统中Agent 知识获取的
合作模型[J ].软件学报,2001,12(1):256-262.
[3]向郑涛,缪育平,鲁东明.面向Agent 的软件分析和设计方法[J ].计算机科学,2004,31(6):127-131.
[4]毛新军,闫琪,王怀民,等.面向Agent 的软件开发方法[J ].计算机科学,2003,27(5):94-96.
[5]
Wang Huaimin,Wu Quanyuan.A formal framework of muti-agent system with requirement service cooperative style [J ].Jour-nal of Computer Science and Technology,2000,15(2):106-115.[6]
ZambonelLi F,Omicini A.Challenges and research directions in agent-oriented software engineering [J ].Autonomous Agents and Muti-Agent System,2004,9(3):253-283.[7]许云,樊孝忠.在专家系统中利用关系数据库来表达知识[J ].计算机机工程与应用,2003,39(22):91-94.
[8]
王忠祥,郭宝恩.基于数据库的知识表达与推理研究[J ].机械设计与制造,2005,34(9):152-154.
智能交通视频监控系统 、概述 视频智能分析监控系统是道路交通指挥系统的一个重要组成部分,它能为交通指挥人员提供道路交通的直观信息与实时交通状况,便于及时发现各种交通违章和其他可疑情况,有利于交通指挥人员迅速作出响应;视频智能分析监控系统的实时录像功能同时也是处理交通事故和协助社会治安整治的取证手段。可以说,视频智能分析监控对于加强安全防范和交通管理至关重要。 伴随经济增长和城市化进程的发展,新的城市交通基础设施的不断兴建,人、车流量都不
断增长,相应的,视频智能分析监控系统也一再扩容。在监控系统越来越庞大、监控信息量越来越多的情况下,单纯依赖有限的交管人力资源来实现全时、全面的监控,成为几乎不可能的事情。 本方案的提出,旨在利用当今最前沿的智能视频分析技术,对目前的城市道路交通监控系统进行改造,实现道路交通中异常行为的智能识别、提前发现和自动报警,从而减轻交管监控人员的工作负担,提高监测准确度,使城市道路交通管理工作更加有效。
需求分析 2.1 城市道路交通智能视频智能分析监控系统的主要作用: 1)路况监视:各路口的摄像机会及时将所监控区域的实时图像传回交通指挥中心,使交通指挥人员实时掌握各路口和路段的交通状况 2)智能分析:针对整个监控系统的路口较多,出现许多违反交通规则行为的情况下,以传统的监控模式,只凭人的肉眼和事后查,例如:路段人车流量、信号灯是否正常工 作、是否有违章行为和交通事故发生。这些信息能帮助交通管理部门及时采取合适的 处理方式。看录像来做到,任务量是相当多。所以我们所说的智能监控就是通过智能 视频分析设备来代替人力完成监视和查询违章的交通事件。 3)录像:视频智能分析监控的图像会保存到交通指挥中心的录像服务器上,作为处理交通事故、违规行为甚至是治安犯罪等各种突发情况的取证依据。 2.2 对视频智能分析监控系统的主要要求: (1)满足7*24 小时运行要求。系统运行必须稳定可靠,故障率低,检修方便。 (2)画面延迟小,图像清晰度高。 (3)技术领先,有一定前瞻性,满足较长期间的需求。 (4)多层级联网,并能适应灵活扩容的需要。 (5)能有效减轻交管部门工作负荷,缓解城市增长迅速与交通警力不足间的矛盾。 2.3 智能交通客户功能需求分析: 违章或故障、事故停车: 在车道上或禁止停车区域出现停车现象,不论是因车辆故障停车或违章停车,都或属于极为危险的事件,或属于易引起交通阻塞的违章行为,需要及时进行处理,而事故停车也需要管理部门及时知晓尽快处理以恢复交通,视频分析技术可以及时发现停车行为,提醒交通管理部门及时处理。(使用弃置规则) 违章左转右转:在某些道口,是不允许进行左转或右转,否则不但容易引起交通阻塞,也容易引起交通事故导致生命财产的损失,通过视频分析技术自动检测违章左转或右转行为,可以对这
视频监控跟踪系统的研究 视频监控跟踪系统的研究 【摘要】视频监控跟踪系统是对图像信号目标进行实时自动识别,进而对目标位置的相关信息进行有效的提取,并且自动跟踪目标运动的伺服系统。在对精度与动力进行分析与研究的情况下,研发了跟踪伺服机械系统,并且开展了具备分布、集中的特点,同时对微机测控系统与网络通信系统的电路软件与硬件进行了相关的设计,探索了自适应跟踪算法的应用。 【关键词】视频监控系统;自适应跟踪算法;跟踪伺服系统 随着科学技术的不断发展与进步,视频监控跟踪系统方面的研究也取得了一定的进步。成像跟踪指的就是利用景物图像的特点对运动中的目标展开跟踪的技术,跟踪装置一般是由伺服机构与操作系统共同构成的,可以在图像信号中对跟踪目标进行实时自动识别,进而提取位置信息的一种复合技术系统。 一视频监控跟踪系统实现自动跟踪所面临的问题 ㈠运动目标的检测 在图像序列中,对于运动目标的检测是一项非常关键并且困难的研究课题,在完成运动补偿、视频理解以及视频压缩编码的过程中,均需要利用相应的运动目标检测技术,在视频理解中,开展运动目标的检测是为后续的识别、跟踪以及活动分析奠定了坚实的基础。运动目标的检测指的就是对图像序列展开相关的检测,指出与运动物体三维有关的一些点,滤除一些与运动目标无关的信息。正确检测运动目标可以极大的提高后续识别、活动分析以及跟踪的正确率。通常情况下,均需要视频监控系统展开长时间的运行,也就需要系统达到以下几点要求:一是,可以与背景的变化相适应,比如可以适应一天时间内所有时间的光照变化;二是,能够与背景物体的变化相适应,比如场景物体的移入与移出等场景的变化;三是,可以有效的对背景中一些比较大的变化进行分辨,比如显示器屏幕的闪烁等情况;四是,可以检测出光照的变化情况,并且可以在尽可能短的时间里适应这样的
综合行业智能监控解决方案 第一部分概述 目前,随着现代城市建设和道路交通的发展,各种车辆越来越多,车辆与道路的矛盾、交通与环保能源的矛盾越来越尖锐,机动车遭盗抢案件越来越多,给交通管理部门带来很大的压力。 近年来,人们一直致力于寻找治理交通拥挤、加强车辆调度及遇险报警的最佳解决方案,GPS全球卫星定位系统的应用使人们看到了未来城市交通管理智能化的希望。为机动车辆特别是数目众多的货运车辆、客运车辆、出租车辆等大量的公共交通提供定位、监控、报警和指挥调度、信息发布等全方位的服务,是一项会产生极大的社会效益和经济效益的高科技产业。 贝尔科技将最新的CDMA通信技术和GPS卫星导航全球定位技术、GIS地理信息技术以及计算机网络技术相融合,研制开发出“河南电信车辆监控调度系统”。该系统能很好地满足对机动车辆的指挥、调度、管理、监控、导航、通信等需要。 全球卫星定位系统应用的春天已经来临,这是众多GPS定位厂商和贝尔集团及客户的共识,但是更需要性能稳定的GPS终端产品支撑才能塑造好GPS市场的良性和持续发展。我们“秉承专业品质,铸造行业精品”,相继研发生产了系列卫星定位车载终端。 贝尔科技继承一贯精湛的技术品质,推出的SMS、SMS+CDMA
车载终端,通过严格测试,性能稳定,功能强大;研发的C/S+B/S 混合架构GPS系统,适合企业乃至整个城市构建车载卫星定位运营平台。 我们将提供软件开发、系统集成到运营服务等系列化全程服务,最大化让利于合作伙伴,实现客户、合作伙伴和贝尔集团的多赢。 等待您的决策,希望我们能够合作,共同发展! 第二部分功能介绍 一、车辆定位查询功能 客户服务中心根据用户需要可随时了解所有车辆的实时位置,并能在中心的电子地图上准确地显示车辆当时的状态(如速度,运行方向等信息)。本系统的电子地图采用矢量方式,对任意指定区域的车辆进行查询,可根据需要分层显示信息;可任意放大、缩小、移动;可进行同屏多窗口显示监控,或将目标锁定在某窗口,自动跟踪等。 二、报警功能 客户服务中心收到车载终端发来的报警信号(如主动紧急报警、断电报警、欠压报警、卸料报警等),系统将进行自动分类处理,并伴以声、光方式提示指挥人员,报警的车辆在地图上以醒目方式显示报警状态和报警地点,并根据需要将报警目标的监视级别提升,同时自动记录轨迹、自动录音。指挥人员可根据报警情况和警力分布,用短消息或语音进行指挥调度和警情处理。
专业综合实践任务书 学生姓名:________专业班级: 指导教师: 工作单位: 信息工程学院 题目:检测交通视频中运动目标的程序设计 初始条件: (1)提供实验室机房及其matlab软件; (2)数字图像处理的基本理论学习。 要求完成的主要任务:(包括课程设计工作量及其技术要求,以及说明书撰写等具体 要求): (1)学习运动目标检测的原理及方法,并利用matlab设计程序完成以下功能;(2)读取交通视频文件; (3)运用一种背景建模方法,提取背景图像; (4)读取一帧有运动目标的图像,利用背景差分法,得到差分区域; (5)对差分区域进行数学形态学处理,得到完整的运动目标区域,并显示运动目标检测结果图; (6)对检测的结果进行分析比较; (7)要求阅读相关参考文献不少于5篇; (8)根据课程设计有关规范,按时、独立完成课程设计说明书。 时间安排: (1) 布置课程设计任务,查阅资料,确定方案 1.5天; (2) 进行编程设计、调试2天; (3) 完成课程设计报告书、答辩 1.5天; 指导教师签名: 年月日系主任(或责任教师)签名: 年月日
目录 摘要 (1) 1.概述 (2) 2.设计原理 (3) 2.1 背景提取与更新算法 (3) 2.1.1 手动背景法 (4) 2.1.2 统计中值法 (4) 2.1.3 算术平均法 (4) 2.1.4 Surendra算法 (5) 2.2 背景差分法运动目标检测 (6) 2.3 形态学滤波 (7) 2.4总体方案设定 (9) 2.4.1 算术平均法与Surendra算法相结合的背景建模 (9) 2.4.2 总体程序框图 (10) 3.软件编程实现 (11) 4.结果及分析 (13) 5.心得体会 (17) 参考文献 (18)
图像视频跟踪系统 摘要:通过对图像进行阈值处理(图像分割),再对分割后的图像求取形心,以对目标图像进行定位,并最后找到各幅帧图像的目标位置的方法,从而实现对200帧视频图像的实时跟踪。 关键词:阈值处理;视频序列目标跟踪;形心估计 1 引言 视频序列目标跟踪是指对传感器摄取到的图像序列进行处理与分析,充分利用传感器采集得到信息来对目标进行稳定跟踪的过程。一旦目标被确定,就可获得目标的位置、速度、加速度等运动参数,进而获得目标的特征参数。在军事上,视频序列目标跟踪技术广泛应用于精确制导、战场机器人自主导航、无人机着降,靶场光电跟踪等领域。在民用上,该技术在智能视频监控、智能交通管制、医疗影像诊断等方面也有很重要的应用。 视频跟踪目前在国内外都有较广泛的研究和应用,比如2005年,美国中央佛罗里达大学计算机视觉实验室开发出了基于MATLAB的COCOA系统,用于无人机低空航拍视频图像的目标检测与跟踪处理。 2 基于MATLAB的图像跟踪算法 2.1 200帧视频图像的读取 由于视频是由200帧图像通过连续播放从而达到视频的效果的,所以要达到视频放映的效果,应首先对200帧图像序列进行顺序读取。200帧图像存储在MATLAB的默认路径中,文件名为00000xxx.bmp。要达到读取它们的目的,需要使用循环算法。算法由一个名为read_seqim(i)的函数实现,以下是函数的源程序: function I=read_seqim(i) if nargin==0 i=1;min=00000001; end
name=num2str(i); if i<=9 min=strcat('0000000',name,'.bmp'); elseif i<=99 min=strcat('000000',name,'.bmp'); else min=strcat('00000',name,'.bmp'); end I=imread(min); 其中i为读取图像的序号,通过以上的函数可以很方便的实现对200帧图像中任意一帧的读取,从而为后面的处理提供方便。 2.2 图像的阈值处理(图像分割) 阈值(Threshold),也叫门限。阈值化(Thresholding),即按给定阈值进行图像的二值化处理。阈值分割法可分为以下几种: ?简单阈值分割法; ?多阈值分割法; ?最大类间方差法; ?最佳阈值法。 许多情况,图像是由具有不同灰度级的几类区域组成。如文字与纸张、地物与云层(航空照片)等,阈值分割是利用同一区域的具有某种共同灰度特性进行分割。而用阈值分割法分割图像就是选取一个适当的灰度阈值,然后将图像中的每个像素和它进行比较,将灰度值超过阈值的点和低于阈值的点分别指定一个灰度值,就可以得到分割后的二值图像,此时目标和背景已经得到了分割。阈值分割法简单,快速,特别适用于灰度和背景占据不同灰度级范围的图像。这里我们使用多阈值分割法。 多阈值分割法就是假设一幅图像包含两个以上的不同类型的区域,可以使用几个 门限来分割图象。分割函数如下:2.2.1阈值的确定 01 112 22 ,(,) (,),(,) ,(,) f f x y T g x y f T f x y T f f x y T ≤ ? ? =<≤ ? ?> ?
车辆检测站视频监管系统 解决方案 XXXXXXX工程有限责任公司
目录 第1章系统概述 (1) 1.1机动车检测站总体架构图 (1) 1.2机动车检测站工作流程 (2) 1.3机动车检测站视频监控系统图 (4) 第2章系统简介 (5) 2.1设计原则 (5) 2.1.1先进性与适用性 (5) 2.1.2经济性与实用性 (5) 2.1.3可靠性与安全性 (5) 2.1.4开放性 (5) 2.1.5可扩充性 (5) 2.1.6追求最优化的系统设备配置 (6) 2.1.7提高监管力度与综合管理水平 (6) 2.2设计规范和依据 (6) 2.3系统组成 (7) 2.3.1视频采集系统 (7) 2.3.2视频信号传输系统 (9) 2.3.3数据存储系统 (9) 2.3.4视频监管平台 (10) 2.4系统功能和特点 (10) 2.4.1系统功能 (10) 2.4.2系统特点 (11) 第3章设备选型及配置 (12) 3.1主要设备功能介绍 (12)
3.1.1140万高清一体机 (12) 3.1.2200万高清摄像机 (13) 3.1.3视频综合平台 (13) 3.1.4大屏.................................................................... 错误!未定义书签。 3.2配置清单 (14)
第1章系统概述 随着我省经济的迅速发展,机动车急剧增加,机动车的安全运行问题,质量问题越来越突出。为了进一步加强对机动车的安全管理,提高机动车安全检测的客观性和可靠性,在全省各地州市的机动车检测线安装视频监控系统,将有效地提高检测质量。在检测线安装车牌识别系统及视频监控设备,实现车辆牌号识别并自动录入;检测信息的实时传输;实现与机动车登记系统双向数据交换;车辆识别代号条码识别并校验(另加扫描仪);通过智能视频监控系统,有效避免来车不检及检车不彻底的问题;同时,监控中心可查看检测现场的实时视频监控信息;严把车辆检验关,将被检车与车牌图像信息唯一对应,全面监控汽车检测全过程,有效防止汽车检测过程中的徇私舞弊现象。 1.1机动车检测站总体架构图
交通视频监控系统 设计方案
1.1交通视频监控系统设计方案 1.1.1系统概述 近年来,全国平安城市建设发展迅速,城市重点部位都基本覆盖了视频监控点位,绝大部分视频监控点位都是在路面安装枪、球机为主的低点监控,虽然低点监控在覆盖面积上比较广,但随着城市建设日益扩大,城市环境日益复杂,低点监控资源在5~100米视距内的监控有着明显的局限性,无法满足大范围、超视距、全天候的精确监控。此外,低点监控侧重于局部、细节画面的特写拍摄,无法兼顾整体与局部,对于视频的联动使用、综合应用不够。增强现实立体化防控系统正是在这种环境下孕育而生的。 增强现实立体化防控系统能在业务系统上实现高点增强现实摄像机联动,并通过高点增强现实摄像机的鸟瞰视角观察、调度低点监控资源,可以轻而易举地实现既关注整体又兼顾局部的大范围立体监控。辅以增强现实技术,将视频中的背景信息进行结构化描述,使背
景信息可搜索、可定位,并能实现测距、方位感知、视频联动等功能,增强实时图像与信息的结合,能大大改善监控体验、指挥效率。 增强现实立体化防控系统是针对城市立体化监控而设计,包括视频信号的采集、传输、业务应用等关键环节,智能化程度高,实时性强,系统坚持先进性、实用性、可靠性、经济性、可集成性及可扩展性的建设原则,集成了增强现实系统、人脸比对识别系统、辅助卡口检测系统、视频智能分析系统、平台业务系统等。各个系统相互协同工作,形成以高点监控中的事件目标为驱动,有的放矢、关注细节,实现纵览全局和掌控细节的有机结合,形成高低交错,远近结合的立体监控体系,对城市空间领域进行全方位立体化综合视频监控。 该系统可广泛应用于广场、楼宇、汽车站、火车站等重要监控区域。 本方案建设交通治安卡口系统对公路运行车辆的构成、流量分布、违章情况等交通状况进行常年不断地自动记录,为交通规划、交通管理、道路养护部门提供重要的基础和运行数据,为快速纠正交通违章
采用大华自主研发的视频分析算法,该算法利用智能神经网络技术,对视频图像进行分层处理,并借助计算机强大的数据处理功能,对视频画面中的海量数据进行高速分析,过滤掉冗余的信息,分离出对系统有用的关键信息。 神经网络是基于模拟人脑智能特点和结构的一种信息处理系统,它通过对人脑的基本单元的建模和典型的激励函数的设计,来探索模拟人脑神经系统功能的模型,并研制一种具有并行分布处理与存储、高度自适应和自学功能、能分析较为复杂的非线性系统的软件模拟技术。大华视频检测系统采用的视频分析算法主要包括: 牌照定位分析算法:系统从车辆进入检测区域的第一帧开始,逐帧对牌照定位、跟踪、识别,通过对牌照的跟踪,来获取车辆信息,此算法可以保证在有牌照且牌照无污损、无遮挡情况下,准确捕获车辆。 车辆运动轨迹跟踪算法:系统从车辆进入监测区域的第一帧开始,跟踪分析车辆的运动轨迹,通过轨迹跟踪来获取车辆信息。此算法在无首尾相接的情况下,可以保持较高的识别准确率。 车灯运动轨迹跟踪算法:系统采用车灯光线轨迹跟踪技术,通过对车灯光线由远及近的运动轨迹进行跟踪,来确定车辆的运动轨迹,获取车辆的信息。可以保证在不加频闪灯的方式下,具有较高的捕捉率。 白天,系统通过牌照定位分析算法和车辆运行轨迹跟踪算法,双重分析,选择可信度高的识别结果作为最终结果;晚上,系统通过车灯运动轨迹跟踪算法来获取车辆信息。 为了保证系统在任何时段都有较高的捕获率,白天和晚上的算法切换采用双重标准,一是时间、日期,二是环境参数,如亮度等。通过两种参数的综合分析来准确掌握算法的切换时机,完成算法的自动切换,保证系统较高的车辆捕获率。
车辆检测原理 采用基于运动检测的车辆检测方法,其核心原理是通过学习建立道路背景模型,将当前帧图像与背景模型进行背景差分得到运动前景像素点,然后对这些运动前景像素进行处理得到车辆信息。该方法效果的优劣依赖于背景建模算法的性能。其流程图如下所示: 车辆检测流程图 整个检测过程分为以下几个步骤: 1、由高清摄像抓拍主机获取实时的视频流。 2、利用背景差分算法检测运动前景。首先通过初始多帧视频图像的自学习建立一个背景模型,然后对当前帧图像与背景模型进行差分运算,消除背景的影响,从而获取运动目标的前景区域。
高清(200万CCD)视频车辆检测器 HD (2M CCD) Video Detector TT-L200D-CJ 高清(200万CCD)视频车辆检测器
主要特性 Features ●采用TI达芬奇系列高性能ARM Cortex A8+DSP High performance TI Vinci ARM Cortex A8 & DSP; ●采用标准H.264 main profile 5.0视频压缩技术,压缩比高,码流控制准确、稳定 Standard H.264 main profile 5.0 video compression technology with high compression rate ensures accurate and stable code steam control; ●采用逐行扫描CCD,捕捉运动图像无锯齿 Progressive scan CCD,capturing moving images without serrated edges; ●最高分辨率可达2M (1624×1224) Max. resolution 2M (1624×1224); ●支持1路复合视频输出 Video output: 1 channel; ●支持双码流,ACF(活动帧率控制) Dual-steam, ACF; ●支持数字水印加密,防止数据被篡改 Digital watermark encryption to prevent data to be tampered; ●支持I/O报警、RS485控制功能 Alarm: 1/1 channel In/Out, RS485 control; ●支持丰富的网络协议 Support different network protocol;
机器视觉的辅助驾驶系统的视频中行人 实时检测识别研究文献综述 1机器视觉发展 国外机器视觉发展的起点难以准确考证,其大致的发展历程是:20世纪50年代提出机器视觉概念,20世纪70年代真正开始发展,20世纪80年代进入发展正轨,20世纪90年代发展趋于成熟,20世纪90年代后高速发展。在机器视觉发展的历程中,有3个明显的标志点,一是机器视觉最先的应用来自“机器人”的研制,也就是说,机器视觉首先是在机器人的研究中发展起来的;二是20世纪70年代CCD图像传感器的出现,CCD摄像机替代硅靶摄像是机器视觉发展历程中的一个重要转折点;三是20世纪80年代CPU、DSP等图像处理硬件技术的飞速进步,为机器视觉飞速发展提供了基础条件。 国内机器视觉发展的大致历程:真正开始起步是20世纪80年代,20世纪90年代进入发展期,加速发展则是近几年的事情。中国正在成为世界机器视觉发展最活跃的地区之一,其中最主要的原因是中国已经成为全球的加工中心,许许多多先进生产线己经或正在迁移至中国,伴随这些先进生产线的迁移,许多具有国际先进水平的机器视觉系统也进入中国。对这些机器视觉系统的维护和提升而产生的市场需求也将国际机器视觉企业吸引而至,国内的机器视觉企业在与国际机器视觉企业的学习与竞争中不断成长。 未来机器视觉的发展将呈现下列趋势: (1)技术方面的趋势是数字化、实时化、智能化 图像采集与传输的数字化是机器视觉在技术方面发展的必然趋势。更多的数字摄像机,更宽的图像数据传输带宽,更高的图像处理速度,以及更先进的图像处理算法将会推出,将会得到更广泛的应用。这样的技术发展趋势将使机器视觉系统向着实时性更好和智能程度更高的方向不断发展。 (2)产品方面:智能摄像机将会占据市场主要地位 智能摄像机具有体积小、价格低、使用安装方便、用户二次开发周期短的优点,非常适合生产线安装使用,越来越受到用户的青睐,智能摄像机所采用的许多部件与技术都来自IT行业,其价格会不断降低,逐渐会为最终用户所接受。因此,
十堰市航空路交通视频监控系统方案研究 摘要:航空路,是连接十堰市中心城区与武当山机场的重要道路,全线共设置1 处隧道、5处桥梁,为双向六车道断面。本文从交通视频监控系统分别设置在隧道、高架桥及跨线桥、交叉口等位置具体论述交通视频监控系统的设计原则。 关键词:航空路;视频监控;设置原则 1 十堰市航空路道路概况 航空路位于十堰市茅箭东城开发区及十堰经济开发区龙门工业园境内,是连 接十堰市中心城区与武当山机场的重要道路。拟建航空路位于十堰市东部,西起 火箭路与林荫大道2号线交叉口东南,东接现状机场路东段,是十堰市骨架路网 中重要的“一横”的主要部分。本项目的建设对完善区域骨架路网系统,改善十堰 东部地区路网结构,提升东部片区交通疏解能力,解决沿线地区的交通出行及市 政配套,拉开航空路沿线开发建设框架,带动沿线区域土地的开发具有重要的意义。 航空路起点与林荫大道与火箭路立交工程衔接,由西往东,与林荫大道3号 线平面交叉后连续跨越规划路、黑龙江路、东风大道、标致路后接龙门隧道,继 续往东穿过龙门五路,与花园街平交,以高架形式跨越和谐大道,再与龙门二路 平交,往东跨越龙门一路、许白路及茅塔河后与现状机场东路衔接,为城市主干路,实施长度为6800m,红线控制宽度45~71m。共设置1处隧道、5座桥梁与 东风大道交叉处设置菱形立交1座。 2 交通视频监控系统简述 交通视频监控系统一般由采集、传输、控制和显示四部分组成。图像采集工 作由前端的摄像机完成,采集质量的好坏将直接影响视频图像处理的效果。如果 视频图像中的车辆信息清楚,对比度好,无干扰信息或干扰信息少,将有利于车 辆的检测和跟踪,反之,将不利于车辆的检测和跟踪;根据摄像机和控制中心之 间距离的长短,会采用不同的传输设备,一般的传输方式包括视频基带传输、射 频有线传输、光纤传输、电话线传输等;控制部分是整个交通视频监控系统的中心,由总控制台组成。总控制台可以进行信号的缩放、矫正、补偿、切换、遥控、记录存储图像等;显示部分的功能就是把传送过来的图像显示出来,由若干台监 视器组成。 3 设置作用 交通监控系统主要用于观测和记录路面实际状况,也可用于路面违停和违反 禁令标志的违法监测。系统能为交通管理人员直观地反映道路交通信息与交通状况,便于及时掌握交通动态,能够在交通事故处置、交通疏导、交通违法取证、 及时响应交通突发事件、侦破刑事案件等方面发挥重要作用。下面将分别从隧道段、高架桥和跨线桥段以及交叉口段对交通监控系统进行讨论。 4 设置原则 4.1.中、长、特长隧道(封闭段长度L>500m) (1)按交通监控Ⅰ级标准设置。 (2)应实现全路段全覆盖监控,视频监控点布设间距不超过300m,与交通 事件检测设备错开布置。 4.2 城市特大桥梁(总长L>1000m)及快速路 (1)按交通监控Ⅱ级标准设置。 (2)应全覆盖设置视频监控点,布设间距不超过500m,遇匝道、立交适当
视频交通流信息采集系统解决方案 1概述 视频交通流信息采集系统主要包括视频图像采集设备、视频传输网络、交通流视频检测器等。视频检测器采用虚拟线圈技术,利用边缘信息作为车辆的检测特征,实时自动提取和更新背景边缘,受环境光线变化和阴影的影响较小;同时采用动态窗的方式来进行车辆计数,解决了采用以往固定窗方式进行车辆计数时由于车辆变道而导致的错误、重复计数问题。视频检测器能对视频图像采集设备或交通电视监视系统的视频信号自动进行检测,主要采集道路的微观交通信息如流量、速度、占有率、车辆间距、排队长度等,适用于近景监控模式。 2系统功能及特点介绍 2.1数据接口设计 视频交通流信息采集系统可以通过调用本项目提供的交通流数据统一接入接口,或由本项目提供数据格式标准化及上传程序,将采集到的交通流数据共享给本项目相关系统,以实现视频交通流数据的采集功能。 图1 数据接口设计 2.2系统功能 交通流信息视频检测系统的主要功能如下: (1)车辆检测 系统能够对输入的视频流图像进行车型、车牌等特征检测。
(2)交通流数据采集功能 系统可以采集交通流数据包括交通流量、平均车速、车道占有率、车型、平均车头间距、车辆排队长度、车辆密度、交通流状态等,交通流数据采集时间间隔在1~60分钟任意可调。 图 2 视频交通流检测模块 (3)视频图像跟踪功能 系统能对单路监控前端设备在不同预置位采集的视频图像进行不同区域不同事件的自动检测。一旦检测到特定的交通事件,事件检测器应具有该交通事件的视频图像目标自动跟踪、记录、分析功能。 当输入的视频图像不为设定的预置位的视频图像,系统应能自动不进行事件检测。一旦监控前端设备恢复至设定的预置位,系统应能自动进行事件检测。 (4)事件图像抓拍、录像功能 系统可以根据用户的设置,完成相应的录像和图片抓拍功能。 事件录像可以按摄像机、按事件类型、按时间归档存储在系统的预录像子系统中,由系统服务器进行统一的管理调用。 系统循环进行录像,当发生交通异常事件时,系统能够提供事发之前和之后的3分钟间的录像(可设置)。 系统可通过多种组合查询条件对视频交通流检测所采集的数据进行统计,包括时间-流量统计、时间-平均车速统计、时间-占有率统计、速度-流量统计等;统计结果可导出为
摘要 当今科技飞速发展,带来了智能交通的空前发达,也为经济可持续发展做出一定贡献。交通运输在一个国家的经济社会发展中起着助推器的作用。交通运输的监控与管理智能化也变得尤为重要。基于视频的车辆检测作为智能交通系统的基石,具有直观性、大范围检测、安装和维护方便等优势,成为采集交通信息技术的有力工具。因而视频车辆检测研究具有非常重要的意义。 本论文首先介绍了图像检测的研究背景以及发展情况,然后重点介绍了本论文中进行车辆检测的技术和方法。该方法先对图像进行灰度值化处理,中值滤波处理及二值化处理,然后利用车辆移动的特点进行检测,最后将移动中的车辆进行加框标记。实验结果表明, 本程序设计能够在一定的误差范围内实现对移动车辆进行检测。且效果良好。 本文视频车辆检测系统是采用图像处理的方法进行设计,本研究有着一定的现实意义。 关键词:智能交通;车辆检测;图像处理;MATLAB
Abstract Today, science and technology develop quickly. And it make Intelligent Transportation System was more developed. It has also made a certain contribution for the sustainable development of economy. Transportation plays the role of booster in economic and social development of a country. It is important that make monitoring and management of transportation to be more intelligence. Vehicle Detection System that bases on the video is footstone of Intelligent Transportation System. It can watch easily. It can do a large-scale detection. And its installation and maintenance is convenient. It will be a helpful tool of collecting the information of traffic. So it has an important meaning for researching the detection of vehicles. This dissertation introduces the background of the research and the development of the situation. Than introduces the technology and method of Vehicle Detection System detailed. The method is to make the image gray processing, median processing and binary image processing at the first. Using the characteristics of vehicle moving detects vehicles at the second. Finally, sign frames on vehicles. The experimental results show that the program can detect the moving vehicles within a certain range of error and has good result. This Vehicle Detection System that bases on the video designed with the technology of image processing. It is of practical significance in this research. Key words:intelligent transportation; vehicle detection; image processing; MATLAB
智能交通视频监控系统 解 决 方 案
一、概述 视频智能分析监控系统是道路交通指挥系统的一个重要组成部分,它能为交通指挥人员提供道路交通的直观信息与实时交通状况,便于及时发现各种交通违章和其他可疑情况,有利于交通指挥人员迅速作出响应;视频智能分析监控系统的实时录像功能同时也是处理交通事故和协助社会治安整治的取证手段。可以说,视频智能分析监控对于加强安全防范和交通管理至关重要。 伴随经济增长和城市化进程的发展,新的城市交通基础设施的不断兴建,人、车流量都不断增长,相应的,视频智能分析监控系统也一再扩容。在监控系统越来越庞大、监控信息量越来越多的情况下,单纯依赖有限的交管人力资源来实现全时、全面的监控,成为几乎不可能的事情。 本方案的提出,旨在利用当今最前沿的智能视频分析技术,对目前的城市道路交通监控系统进行改造,实现道路交通中异常行为的智能识别、提前发现和自动报警,从而减轻交管监控人员的工作负担,提高监测准确度,使城市道路交通管理工作更加有效。
二、需求分析 2.1城市道路交通智能视频智能分析监控系统的主要作用: (1)路况监视:各路口的摄像机会及时将所监控区域的实时图像传回交通指挥中心,使交通指挥人员实时掌握各路口和路段的交通状况 (2)智能分析:针对整个监控系统的路口较多,出现许多违反交通规则行为的情况下,以传统的监控模式,只凭人的肉眼和事后查,例如:路段人车流量、 信号灯是否正常工作、是否有违章行为和交通事故发生。这些信息能帮助交 通管理部门及时采取合适的处理方式。看录像来做到,任务量是相当多。所 以我们所说的智能监控就是通过智能视频分析设备来代替人力完成监视和 查询违章的交通事件。 (3)录像:视频智能分析监控的图像会保存到交通指挥中心的录像服务器上,作为处理交通事故、违规行为甚至是治安犯罪等各种突发情况的取证依据。 2.2对视频智能分析监控系统的主要要求: (1)满足7*24小时运行要求。系统运行必须稳定可靠,故障率低,检修方便。 (2)画面延迟小,图像清晰度高。 (3)技术领先,有一定前瞻性,满足较长期间的需求。 (4)多层级联网,并能适应灵活扩容的需要。 (5)能有效减轻交管部门工作负荷,缓解城市增长迅速与交通警力不足间的矛盾。 2.3智能交通客户功能需求分析: 违章或故障、事故停车: 在车道上或禁止停车区域出现停车现象,不论是因车辆故障停车或违章停车,都或属于极为危险的事件,或属于易引起交通阻塞的违章行为,需要及时进行处理,而事故停车也需要管理部门及时知晓尽快处理以恢复交通,视频分析技术可以及时发现停车行
基于视频技术的直接交通事件检测高速公路和城市快速路是承担我国公路运输和城市道路运输的主要道路,具有车速快、流量大等许多特点,一旦发生突发交通事件,极易引发交通事故,严重影响道路的通行能力和运营效率。在日常的交通运行和交通管理中,如果仅仅依靠人工报告,电视监视等非自动检测方法发现交通事件,不但浪费大量的资源,而且不全面及时,给交通安全带来了隐患。因此,交通事件自动检测技术越发成为智能交通的研究热点,旨在第一时间快速发现交通事件的地点,利于及时处理交通事件。 交通事件指偶发性交通事故、车辆抛锚、恶劣天气、货物散落、道路养护、体育赛事、规模集会等交通情况。高速公路和城市快速路上发生的停车、逆行、慢行、拥堵、行人穿越、交通事故是需要重点管控的交通事件。当发现这些交通事件时,交通事件自动检测系统能够立刻报警,自动记录违章违法依据,同时快速处置交通事件,消除安全隐患、减少交通事件的损失。例如,图1(a)为行人穿越高速公路交通事件,图1(b)为高速公路车辆拥堵交通事件。
交通事件的视频检测技术研究概述 交通事件自动检测方法 图2为交通事件检测研究方法结构示意图,分为自动和非自动检测方法,其中非自动技术主要包括人工报告,电视监视等,自动技术主要有直接和间接检测法。直接检测法是一种基于视频的处理方法,通过交通事件视频检测算法,直接检测交通事件。间接检测法是一种基于交通流参数的处理方法,通过模式识别、数学统计、交通模型、人工智能等方法,融合交通流数据检测交通事件。直接法和间接法的特点可总结如下: 1、由于交通系统具有很强的非线性、模糊性、不确定性,研究表明间接法有许多不足之处,不但安装麻烦,而且费用较高,在交通流密度高时,间接法具有较好的检测效果,在交通密度低时检测效果不好。 2、由于直接法是根据视频图像内容,直接判断是否有交通事件发生,研究表明直接法的判别速度上远远胜于间接法,即使交通流量很低,也能对交通事件进行良好的判断。 鉴于交通事件的直接检测法的快速判断能力和其广泛交通的实用性,本文主要涉及基于视频的直接交通事件检测方法的研究和应用情况。 国外研究状况 由于模式识别、图像处理、计算机视觉、人工智能等技术的快速发展,国外开展交通事件的视频技术研究较早,而且技术也比较成熟。目前,国外已经研究出多种交通事件视频检测系统,如Autoscope、Siemens、Traficon、Videotrack等。这些系统基本能够实现平均队列长度、平均车速、车头时距、事故检测、拥挤度检测、车辆跟踪等功能。Autoscope交通事件视频检测系统目前已经成功应用于美国乔治亚洲运输部出行向导、北京四环路交通量检测、韩国奥林匹克交通信息系统、纽约高速公路事故管理系统、香港隧道事故检测信息系统等。 国内研究状况
EL-IVOT智能视频目标跟踪系统 一、适用范围: EL-IVOT主要适用于从事嵌入式图象处理软硬系统研究、数字图像处理算法研究、智能视觉算法研究、目标跟踪算法研究等相关领域的大学老师、研究生、高年级本科生,及研究所的科研人员等。 二、系统资源: 系统硬件资源: DM6437图像处理平台一台,(内含EL-DM6437图像处理子系统和TDS560仿真器一台) 高速球一个(内含索尼摄像头一台,18倍彩转黑,480线) 26寸液晶电视一台 遥控汽车一部 系统软件资源: EL-DM6437EVM视频开发包 EL-DM6437EVM达芬奇视频开发板完整DSP示例程序及实验指导书 VLIB(视频处理算法库)完整DSP示例程序及实验指导书 EL-IVOT(智能视频目标跟踪样例算法)完整DSP工程文件及实验指导书 三、产品功能: 系统主要功能: 第一部分功能是EL-DM6437EVM图像处理开发硬件平台基础学习功能。 它包括了板卡硬件资源实验,包括DSP的基础实验和一些基本的图像算法实验,实验提供了完整的DSP示例程序及实验指导书,为了加快数字图象研究人员的开发流程,我公司还开发了DM6437_USBTool图象软件包,通过图像处理开发套件,用户可以了解到DSP 的基本原理和基础数字图像处理算法在DSP上的实现过程。 第二部分功能是VLIB(视频处理算法库)算法学习功能。 它包括了对VLIB视频处理算法库的讲解,内涵二十多种算法共五十多个函数的详细介绍,内容涉及背景建模与背景抽取、目标特征提取、跟踪与识别、低级别像素处理等,可广泛应用于视频分析、计算机视觉、汽车视觉、嵌入式视觉系统、游戏视觉系统、机器视觉系统、消费类电子产品视觉系统等领域,使用户可以快速了解这些流行的视频算法。 在讲解算法的基础上,该套件以数字图像和视频为实验素材,提供了20个实验,这些实验向用户展示了VLIB函数的使用方法,使用户可以快速了解这些函数的接口,进而提高代码移植的效率,缩短工程项目开发的时间。 第三部分功能是EL-IVOT智能视频物体跟踪系统。 本实验系统从两个应用需求入手,完成了用于运动物体的标记和跟踪、以及遗留物体检测的视频监控系统,向用户展示了达芬奇系列在智能视频处理领域中的表现。该系统使用了当前智能视频处理领域中的许多流行的算法,如高斯混合模型、卡尔曼滤波器和均值
视频交通流检测及车辆识别系统的设计 发表时间:2005-8-24 李华明来源:希赛网 关键字:自动识别技术视频交通流检测车辆识别图象预处理图 信息化应用调查本文论述了视频交通流检测和车辆识别系统的设计思想,以及实现时使用的基本算法。并提出了提高检测实时性的具体措施。 1 引言 随着我国经济建设的蓬勃发展,城市的人口和机动车拥有量也在急剧增长,交通流量日益加大,交通拥挤堵塞现象日趋严重,交通事故时有发生。交通问题已经成为城市管理工作中的重大社会问题,阻碍和制约着城市经济建设的发展。因此,深入研究解决城市交通问题有着极为重要的现实意义。要解决城市交通问题,就必须准确掌握交通信息。目前国内常见的交通流检测方法有人工监测、地埋感应线圈、超声波探测器、视频监测4类。其中,视频监测方法比其他方法更具优越性。 视频交通流检测及车辆识别系统是一种利用图象处理技术实现对交 通目标检测和识别的计算机处理系统。通过对道路交通状况信息与交通目标的各种行为(如违章超速,停车,超车等等)的实时检测,实现自动统计交通路段上行驶的机动车的数量、计算行驶车辆的速度以及识别划分行驶车辆的类别等各种有关交通参数,达到监测道路交通状况信息的作用。同时,将检测和识别到的交通信息存储起来,为分析和交通管理提供依据,因此它也是一个交通信息的管理系统。 2 视频交通流检测和车辆识别系统概述
视频交通流量检测及车辆识别系统是一个集图象处理系统和信息管理系统为一体的综合系统。计算机图象处理主要由图象输入,图象存储和刷新显示,图象输出和计算机接口等几大部分组成,这些部分的总体构成方案及各部分的性能优差直接影响处理系统的质量。图象处理的目标是代替人去处理和理解图象,因此实时性,灵活性,精确性是对系统的主要要求。 2.1 系统构成 通过摄象机将道路交通流图像捕捉下来,再将这些捕捉到的序列图像送入计算机进行图象处理、图象分析和图象理解,从而得到交通流数据和交通状况等交通信息,这是系统的基本工作流程。 图1 系统构成图 2.2 系统工作原理 (1) 通过系统初始化,对系统中的参数进行设定,如每秒采集图象的帧数,图象二值化的门限值(阈值)等等。由图像采集系统将摄像机摄取的路段上行驶车辆的视频图象按序列连续捕捉下来并数字化,存入内存或帧缓存中。
1.1交通视频监控系统设计方案 1.1.1系统概述 近年来,全国平安城市建设发展迅速,城市重点部位都基本覆盖了视频监控点位,绝大部分视频监控点位都是在路面安装枪、球机为主的低点监控,虽然低点监控在覆盖面积上比较广,但随着城市建设日益扩大,城市环境日益复杂,低点监控资源在5~100米视距内的监控有着明显的局限性,无法满足大范围、超视距、全天候的精确监控。此外,低点监控侧重于局部、细节画面的特写拍摄,无法兼顾整体与局部,对于视频的联动使用、综合应用不够。增强现实立体化防控系统正是在这种环境下孕育而生的。 增强现实立体化防控系统能在业务系统上实现高点增强现实摄像机联动,并通过高点增强现实摄像机的鸟瞰视角观察、调度低点监控资源,可以轻而易举地实现既关注整体又兼顾局部的大范围立体监控。辅以增强现实技术,将视频中的背景信息进行结构化描述,使背景信息可搜索、可定位,并能实现测距、方位感知、视频联动等功能,增强实时图像与信息的结合,能大大改善监控体验、指挥效率。 增强现实立体化防控系统是针对城市立体化监控而设计,包括视频信号的采集、传输、业务应用等关键环节,智能化程度高,实时性强,系统坚持先进性、实用性、可靠性、经济性、可集成性及可扩展性的建设原则,集成了增强现实系统、人脸比对识别系统、辅助卡口检测系统、视频智能分析系统、平台业务系统等。各个系统相互协同工作,形成以高点监控中的事件目标为驱动,有的放矢、关注细节,实现纵览全局和掌控细节的有机结合,形成高低交错,远近结合的立体监控体系,对城市空间领域进行全方位立体化综合视频监控。 该系统可广泛应用于广场、楼宇、汽车站、火车站等重要监控区域。 本方案建设交通治安卡口系统对公路运行车辆的构成、流量分布、违章情况等交通状况进行常年不断地自动记录,为交通规划、交通管理、道路养护部门提供重要的基础和运行数据,为快速纠正交通违章行为、快速侦破交通事故逃逸和机动车盗抢等提供重要的技术手段和证据,对提高公路交通管理的快速反应能力