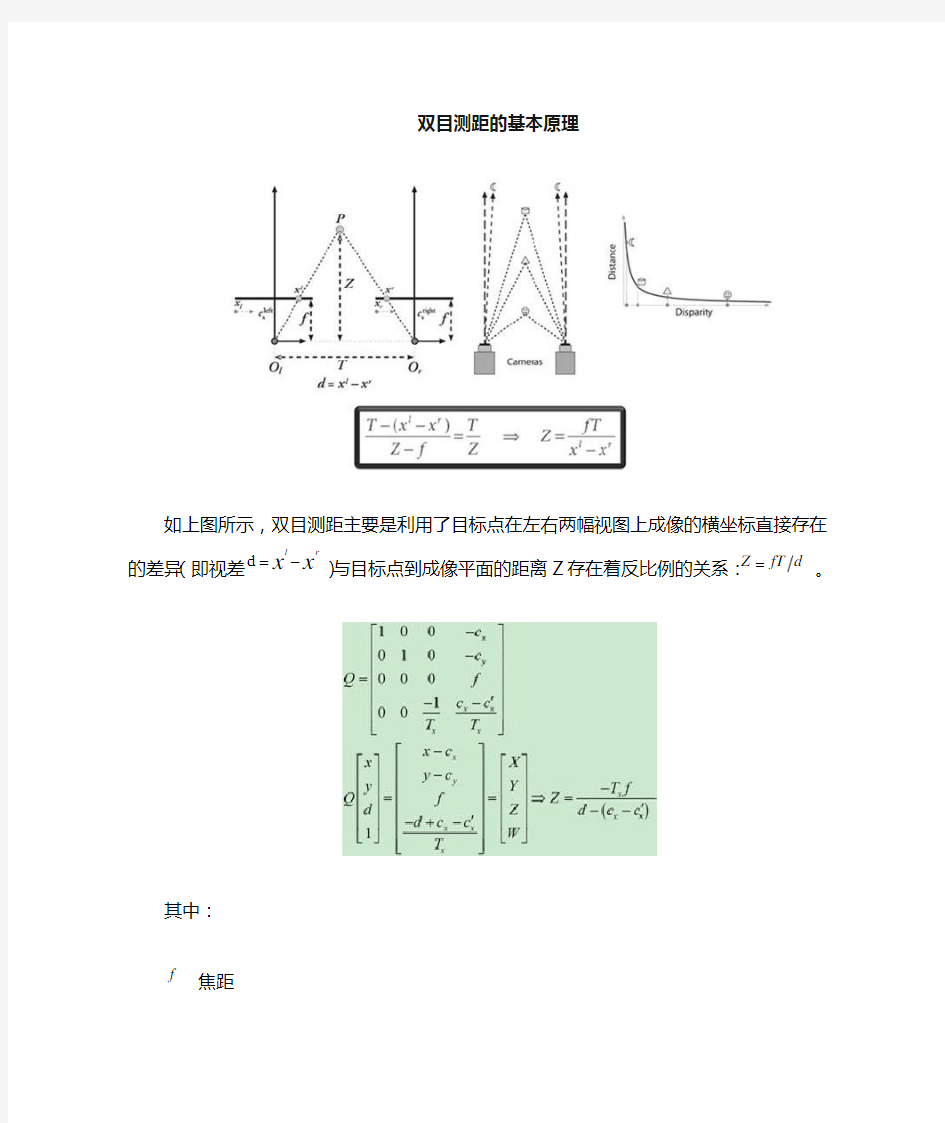

双目测距的基本原理
如上图所示,双目测距主要是利用了目标点在左右两幅视图上成像的横坐标直接存在的差异(即视差d l
r
x x =-)与目标点到成像平面的距离Z 存在着反比
其中:
f 焦距
d 视差
x
T
摄像头中心距
x
c
左像平面的坐标系与立体坐标系中原点的偏移
y
c
右像平面的坐标系与立体坐标系中原点的偏移
其中f ,x T ,x c 和y c 可以通过立体标定获得初始值,并通过立体校准优化,使得两个摄像头在数学上完全平行放置,并且左右摄像头的x c ,y c 和f 形同。而立体匹配所做的工作,就是在之前的基础上,求取视差d (这个d 一般需要达到亚像素精度)。
假设目标点在左视图中的坐标为(x,y ),在左右视图上形成的视差为d ,目标点在以左摄像头为原点的世界坐标系中的坐标为(X,Y ,Z ),则存在上图所示的变换矩阵Q ,使得[][]1Q x
y d X Y Z W =。
图像的获取
摄像头定标
摄像头定标一般都需要一个放在摄像头前的特制的标定参照物(棋盘纸),摄像头获取该物体的图像,并由此计算摄像头的内外参数。标定参照物上的每一个特征点相对于世界坐标系的位置在制作时应精确测定,世界坐标系可选为参照物的物体坐标系。在得到这些已知点在图像上的投影位置后,可计算出摄像头的内外参数。
如上图所示,摄像头由于光学透镜的特性使得成像存在着径向畸变,可由三
个参数1k ,2k ,3k 确定;由于装配方面的误差,传感器与光学镜头之间并非完全平行,因此成像存在切向畸变,可由两个参数
1
p
,
2
p
确定。单个摄
像头的定标主要是计算出摄像头的内参(焦距f 和成像原点x c ,y c 、五个畸变参数(一般只需要计算出1k ,2k ,1
p ,2
p ,对于鱼眼镜头等径向畸变特别大
的才需要计算3k ))以及外参(标定物的世界坐标)。
OpenCV 中使用的求解焦距和成像原点的算法是基于张正友的方法,而求解畸变参数是基于 Brown 的方法。
1.图像坐标系、摄像头坐标系和世界坐标系的关系
轴与图像平面的交点1O ,即为图像坐标系的原点。由点C O 与C X 、C Y 、
C
Z
轴组成的坐标系称为摄像头坐标系,C O 1O 的距离为摄像头焦距,用f 表
示。
图像坐标系是一个二维平面,又称为像平面,实际上就是摄像头的CCD 传感器的表面。每个CCD 传感器都有一定的尺寸,也有一定的分辨率,这个就确定了毫米与像素点之间的转换关系。举个例子,CCD 的尺寸是86mm mm ? ,帧画面的分辨率设置为640480pixel pixel ? ,那么毫米与像素点之间的转换关系就是80/pixel mm 。设CCD 传感器每个像素点的物理大小为dx dy ?,相应地,就
其中,像素点的大小为k l ?,单位为毫米。
其中,f 为摄像机焦距,θ为摄像机坐标系的偏斜度(即两坐标轴不完全垂直,镜头坐标和CCD 是否垂直)。需要说明的是,一般情况下,θ很接近
90,所以在要求不是很严格的情况下就直接将θ设为
90。可能引起误差的情况是:当对一幅照片进行拍摄的时候,由于摄影变换使得照片的图像坐标系在重新成像后不是
90了。此时,若忽略这个参数,将产生很大的定标误差。
称A 为摄像机内参数矩阵。这些参数可能会随着温度、湿度、气压等环境因素的变化而改变,所以为了保证定标的精度,有必要对各内参数进行标定。
33331110C w C w T C w X X t R Y Y Z Z ????????????????
=????????????????
??
其中,33
()x y
z
R r r
r ?= 为旋转矩阵,
33x y z t t t t ?????=??
?????? 为平移向量,
0(00
0)T
=
摄像头矩阵(内参)的目的是把图像的点从图像坐标转换成实际物理的三维坐标。
q MQ =
其中
x
q y
w
??
??
=??
??
??
,
001
x
x
y
y
M
f c
f c
??
??
??
=
??
??
??
,
X
Q Y
Z
??
??
=??
??
??
2.进行摄像头定标时,棋盘方格的实际大小square_size (默认为1.0f )的设置对定标参数的影响。
在标定时,需要指定一个棋盘方格的长度,这个长度(一般以毫米为单位,如果需要更精确可以设为0.1毫米量级)与实际长度相同,标定得出的结果才能用于实际距离测量。一般如果尺寸设定准确的话,通过立体标定得出的Translation向量的第一个分量
x
T的绝对值就是左右摄像头的中心距。
3.OpenCV中用cvCalibrateCamera2 进行相机标定的精度差,标定结果不稳定原因。
原因一:可能是在标定的时候标定板所在平面与成像平面(image plane)之间的夹角太小,张正友论文里的仿真数据(有噪声的数据)说明当两者夹角太小误差会很大,从张正友的论文里给出的5幅图中,其中标定平面与成像平面的夹角分别为: 8.8947、11.2325 、24.4875、10.8535、9.5829(单位:度)。而且张正友的论文中也提到两幅标定板之间的位置平行放置的话,相当于一幅。因此在实际标定中平行放置的情况最好避免。
原因二:标定时拍摄的图片太少,虽然张正友的论文里只用了5幅图片,但是建议10来幅左右还是必要的,因为实际中可能标定板用A4的纸打印出来贴在一块板上的,标定板上的世界坐标精度就不是特别高,多拍摄几幅图像能减少这方面带来的误差,而且多个角度拍摄也可能解决了问题一(标定板和成像
平面夹角小的问题)。
原因三:图像上角点提取的不准确,用cvFindChessboardCorners函数找角
点不是很好,假如拍到的图像不是完整的棋盘格的时候肯定会有问题的,而且也可能用这个函数提取不出角点,建议可以用其他工具:
OpenCV and MatLab Camera Calibration Toolboxes
Enhancement
Camera Calibration Toolbox for Matlab
OpenCV2.1以后对图像角点的提取准确度比较高,cvFindChessboardCorners
和cvFindCornerSubPix结合可以获得很好的角点检测效果。因此,影响定标结果较大的就是标定板与镜头的夹角和棋盘图像数目,在实际定标过程中,棋盘图像数目应该大于20张,每成功检测一次完整的棋盘角点就要变换一下标定板的姿
态(包括角度、距离)。
4.单目定标函数cvCalibrateCamera2采用怎样的flags 比较合适?
k,2k,1p,2p四个参数,所以我们首先要设置由于一般镜头只需要计算
1
CV_CALIB_FIX_K3;
其次,如果所用的摄像头不是高端的、切向畸变系数非常少的,则不要设置CV_CALIB_ZERO_TANGENT_DIST,否则单目校正误差会很大;
如果事先知道摄像头内参的大概数值,并且cvCalibrateCamera2函数的第五个参数intrinsic_matrix非空,则也可设置CV_CALIB_USE_INTRINSIC_GUESS,以输入的intrinsic_matrix为初始估计值来加快内参的计算;
其它的flag 一般都不需要设置,对单目定标的影响不大。
双目定标和双目校正
双目摄像头定标不仅要得出每个摄像头的内部参数,还需要通过标定来测量两个摄像头之间的相对位置(即右摄像头相对于左摄像头的三维平移t 和旋转
R参数)。
要计算目标点在左右两个视图上形成的视差,首先要把该点在左右视图上两个对应的像点匹配起来。然而,在二维空间上匹配对应点是非常耗时的,为了减少匹配搜索范围,我们可以利用极线约束使得对应点的匹配由二维搜索降为一维搜索。
而双目校正的作用就是要把消除畸变后的两幅图像严格地行对应,使得两幅图像的对极线恰好在同一水平线上,这样一幅图像上任意一点与其在另一幅图像上的对应点就必然具有相同的行号,只需在该行进行一维搜索即可匹配到对应点。
1.关于cvStereoCalibrate的使用
如果按照Learning OpenCV 的例程,直接通过cvStereoCalibrate来实现双目
定标,很容易产生比较大的图像畸变,边角处的变形较厉害。最好先通过cvCalibrateCamera2对每个摄像头单独进行定标,再利用cvStereoCalibrate 进行双目定标。这样定标所得参数才比较准确,随后的校正也不会有明显的畸变。
2. cvStereoCalibrate 计算 Essential Matrix 和 Fundamental Matrix
(1) Essential Matrix 本征矩阵
如上图所示,给定一个目标点p ,以左摄像头光心l O 为原点。点p 相对于光心l O 的观察位置为l P ,相对于光心r O 的观察位置为r P 。点p 在左摄像头成像平面上的位置为
l
p
,在右摄像头成像平面上的位置为
r
p
。注意l P 、r P 、
l
p 、r
p
都处于摄像机坐标系,其量纲是与平移向量T 相同的(
l
p
、
r
p
在图
像坐标系中对应的像素坐标为l
q 、r
q )。
假设右摄像头相对于左摄像头的相对位置关系由旋转矩阵R 和平移向量T 表示,则可得:()r l R T P P =- 。
现在我们要寻找由点p 、l O 和r O 确定的对极平面的表达式。注意到平面上任意一点x 与点a 的连线垂直于平面法向量n ,即向量 (x-a) 与向量 n 的点积为0:()0x a n -?=。在l O 坐标系中,光心r O 的位置为T ,则p 、l O 和r O 确定的对极平面可由下式表示:
()0()
T
l T l T P P ??=-。
由()r l R T P P =- 和1
RT R -= 可得:
()0()T
r
T
T r P R P ?=。
另一方面,向量的叉积又可表示为矩阵与向量的乘积,记向量T 的矩阵表示为S ,得:l l T S P P ?=。
那么就得到:0()T
l RS r P P =。这样,我们就得到Essential Matrix :E = RS 。 通过矩阵E 我们知道l P 和
r p 的关系满足:0()T
l E r P P = 。进一步地,由
1
/l
l
l
p
f P Z
=
和
/r
r
r
r
p
f P Z
=
。我们可以得到点P 在左右两个摄像机坐标
系中的观察点
l
p
和
r
p
应满足的极线约束关系为:0()
T
l
E r p
p = 。
注意到 E 是不满秩的,它的秩为2,那么0()
T
l
E r p p =表示的实际上是一
条直线,也就是对极线。
(2) Fundamental Matrix 基础矩阵
由于矩阵E 并不包含摄像头内参信息,且E 是面向摄像头坐标系的。实际上我们更感兴趣的是在图像像素坐标系上去研究一个像素点在另一视图上的对极线,这就需要用到摄像机的内参信息将摄像头坐标系和图像像素坐标系联系起来。在(1)中,
l
p
和
r
p
是物理坐标值,对应的像素坐标值为l
q 和r
q ,摄像
头内参矩阵为M ,则有:1
p q M -=。从而:0()
T
l
E r p
p =,
11
()0T r l
r
l
E q
q
M M --= 。这里,我们就得到Fundamental Matrix :
1
1
()r l F E M M --= 。并有0T r
l
F q q =。
3. cvStereoCalibrate 计算 Essential Matrix 和 Fundamental Matrix
4.双目校正原理及cvStereoRectify 的应用
如图所示,双目校正是根据摄像头定标后获得的单目内参数据(焦距、成像原点、畸变系数)和双目相对位置关系(旋转矩阵和平移向量),分别对左右视图进行消除畸变和行对准,使得左右视图的成像原点坐标一致
(CV_CALIB_ZERO_DISPARITY 标志位设置时发生作用)、两摄像头光轴平行、左右成像平面共面、对极线行对齐。在OpenCV2.1版之前,cvStereoRectify 的主要工作就是完成上述操作,校正后的显示效果如图(c) 所示。可以看到校正后左右视图的边角区域是不规则的,而且对后续的双目匹配求取视差会产生影响,因为这些边角区域也参与到匹配操作中,其对应的视差值是无用的、而且一般数值比较大,在三维重建和机器人避障导航等应用中会产生不利影响。
图15
图16
图17
因此,OpenCV2.1 版中cvStereoRectify新增了4个参数用于调整双目校正后图像的显示效果,分别是double alpha, CvSize newImgSize, CvRect* roi1, CvRect* roi2。下面结合图15-17简要介绍这4个参数的作用:
(1)newImgSize:校正后remap图像的分辨率。如果输入为(0,0),则是与原图像大小一致。对于图像畸变系数比较大的,可以把newImgSize 设得大一些,以保留图像细节。
(2)alpha:图像剪裁系数,取值范围是-1、0~1。当取值为0时,OpenCV 会对校正后的图像进行缩放和平移,使得remap图像只显示有效像素(即去除不规则的边角区域),如图17所示,适用于机器人避障导航等应用;当alpha取值为1时,remap图像将显示所有原图像中包含的像素,该取值适用于畸变系数极少的高端摄像头;alpha取值在0-1之间时,OpenCV按对应比例保留原图像的边角区域像素。Alpha取值为-1时,OpenCV自动进行缩放和平移,其显示效果如图16所示。
(3)roi1, roi2:用于标记remap图像中包含有效像素的矩形区域。对应代码如下:
在cvStereoRectify之后,一般紧接着使用cvInitUndistortRectifyMap来产生校正图像所需的变换参数(mapx, mapy)。
5.为什么cvStereoRectify求出的Q矩阵cx, cy, f都与原来的不同?
在实际测量中,由于摄像头摆放的关系,左右摄像头的f, cx, cy都是不相同的。而为了使左右视图达到完全平行对准的理想形式从而达到数学上运算的方便,立体校准所做的工作事实上就是在左右像重合区域最大的情况下,让两个摄像头光轴的前向平行,并且让左右摄像头的f, cx, cy相同。因此,Q矩阵中的值与两个instrinsic矩阵的值不一样就可以理解了。”
注:校正后得到的变换矩阵Q,Q[0][3]、Q[1][3]存储的是校正后左摄像头的原点坐标(principal point)cx和cy,Q[2][3]是焦距f。
双目匹配与视差计算
立体匹配主要是通过找出每对图像间的对应关系,根据三角测量原理,得到视差图;在获得了视差信息后,根据投影模型很容易地可以得到原始图像的深度信息和三维信息。立体匹配技术被普遍认为是立体视觉中最困难也是最关键的问题,主要是以下因素的影响:
(1)光学失真和噪声(亮度、色调、饱和度等失衡)
(2)平滑表面的镜面反射
(3)投影缩减(Foreshortening)
(4)透视失真(Perspective distortions)
(5)低纹理(Low texture)
(6)重复纹理(Repetitive/ambiguous patterns)
(7)透明物体
(8)重叠和非连续
目前立体匹配算法是计算机视觉中的一个难点和热点,算法很多,但是一般的步骤是:
A、匹配代价计算
匹配代价计算是整个立体匹配算法的基础,实际是对不同视差下进行灰度相似性测量。常见的方法有灰度差的平方SD(squared intensity differences),灰度差的绝对值AD(absolute intensity differences)等。另外,在求原始匹配代价时可以设定一个上限值,来减弱叠加过程中的误匹配的影响。以AD法求匹配代价为例,可用下式进行计算,其中T为设定的阈值。
B、匹配代价叠加
一般来说,全局算法基于原始匹配代价进行后续算法计算。而区域算法则需要通过窗口叠加来增强匹配代价的可靠性,根据原始匹配代价不同,可分为:
C、视差获取
对于区域算法来说,在完成匹配代价的叠加以后,视差的获取就很容易了,只需在一定范围内选取叠加匹配代价最优的点(SAD和SSD取最小值,NCC取最大值)作为对应匹配点,如胜者为王算法WTA(Winner-take-all)。而全局算法则直接对原始匹配代价进行处理,一般会先给出一个能量评价函数,然后通过不同的优化算法来求得能量的最小值,同时每个点的视差值也就计算出来了。D、视差细化(亚像素级)
大多数立体匹配算法计算出来的视差都是一些离散的特定整数值,可满足一般应用的精度要求。但在一些精度要求比较高的场合,如精确的三维重构中,就需要在初始视差获取后采用一些措施对视差进行细化,如匹配代价的曲线拟合、图像滤波、图像分割等。
视觉艺术中形态知觉与心理 张宇1,孟娟2 (1.西安理工大学, 西安710048;2.西安文理学院, 西安710065) [摘要] 在艺术设计的教学实践中对形态知觉、形态心理的理解与认识,对学生进行抽象的形 态构成练习,促使学生思维的改进,促进新的表现方法的研究。旨意通过对视觉艺术形态与心理的研究,以期推动设计造型艺术的健康发展。 关键词:形态;视知觉;视觉思维 中图分类号:B48214;J52411 文献标识码:B 文章编号:1001-3563(2004)04-0203-02 S hap e Conscious ness a n d Ps yc hology i n t he Vis ual A rt ZHANG Yu 1 ,M ENG J ua n 2 (1.X i ′an University of T echnology ,X i ′an 710048,China ; 2.X i ′an C ollege of Arts and Science ,X i ′an 710065,China ) A bst ract :Understanding of shape consciousness and shape psychology in the teaching practice of art design can carry on abstract shape form exercise to student ,im pels im provement of thinking of student ,and prom otes the research of the new technique of expression.The healthy development of design -shaping art was discussed basing on the research of visual art consciousness and psychology. Key wor ds :Shape ;Vision feeling ;Vision thinking 收稿日期:2004206228 作者简介:张宇(1973-),男,西安理工大学教师,主要从事艺术设计基础教学研究。 人的视觉是一种积极的探索工具,这种感官的机能不是仅为认识而存在的认识工具,是为生存延续进化出来的生物性器官。由物理学家们描述的视觉过程是这样的,当光线照射到物体,而物体将一部分光线散发出来,后由晶状体投射在视网膜上,再将这些信息传递给大脑之后形成形象。然而人们对形象的感知并非这样一个简单的生理过程,人的视觉也不是像照相机一样在机械地复制外物,当眼睛发现事物之后,就会主动捕捉、扫描它们的表面,寻找它们的边界,探究它们的质地,与其相对应的心理经验伴随着这种生理活动,视觉是一种主动性很强的感觉形式,这种积极的探索又具有高度的选择性是视知觉的真正含义,所谓视知觉,即是视觉思维。 1 形态的知觉与心理 人类或动物如果想要看到物体,首先要将这个物体从周围背景中分离出来,歌德曾说过,“显现与分离是同意词”,分离出的形态是经验中的一种结构,与视知觉活动密不可分,人们在认识形态时,往往最先捕捉的是它的几个最突出的特征,一个敏捷的漫画家,仅仅通过精心选择出的几笔,便可以把一个人的形象描绘的活灵活现。在生活中很远就能认出对面走来的那个人是谁,这种认识不是通过细节,而是通过这个人所具有的那些最基本的动作特征和身体的胖瘦所判定。只透过几个突出的知觉特征就可以决定对一个形态的认识,诱发记忆,继而创造出一个完整的形态。 人们对形态的知觉能力就是随着能够逐渐把握外部事物的突出结构而发展起来的,那么我们离开规则的人造形状,去观看纷纭万象的风景,某些树干树枝会显示一定的方向,一棵树的轮廓会类似圆形或锥形,只有感觉到具有一种清晰的方向或形像各种几何形体,形态才被知觉,人们观看任何一件事物总是对其形状和视觉秩序进行积极探索,所以说形态的知觉过程即是形成形态概念的过程。 形状不仅仅是由眼睛当时所捕捉到的信息所决定的,它总是与过去所知觉到的各种形状的记忆痕迹相联系,这些记忆痕迹在互相类似的基础上相互干扰。在观看图1a 时,如果被告知是一只站在窗前的长颈鹿,那么眼前的形态就会发生改变。另一方面,人的强烈个人需要也会使记忆痕迹对知觉产生强烈的影响。人如果是非常焦急的等待,一眼便能分辨出几百人中哪一个是要急于见到的对象。知觉与记忆之间最普通和最有用的相互作用,是发生在对眼前事物的认识活动中,“过去”获得的视觉认识,能为眼前的事物划定类别,只有当知觉中首先形成被归类事物的概念,这种归类才有可能,这就使得每次知觉都成为把某一特定现象归入到某一视觉概念之中的活动。 3 02张宇等 视觉艺术中形态知觉与心理
运动目标检测 目录 基于统计背景模型的运动目标检测方法 背景模型提取 运动目标检测 后处理 基于统计背景模型的运动目标检测方法 问题:(1)背景获取:需要在场景存在运动目标的情况下获得背景图像(2)背景扰动:背景中可以含有轻微扰动的对象,如树枝、树叶的摇动,扰动部分不应该被看做是前景运动目标(3)外界光照变化:一天中不同时间段光线、天气等的变化对检测结果的影响(4)背景中固定对象的移动:背景里的固定对象可能移动,如场景中的一辆车开走、一把椅子移走,对象移走后的区域在一段时间内可能被误认为是运动目标,但不应该永远被看做是前景运动目标(5)背景的更新:背景中固定对象的移动和外界光照条件的变化会使背景图像发生变化,需要及时对背景模型进行更新,以适应这种变化(6)阴影的影响:通常前景目标的阴影也被检测为运动目标的一部分,这样讲影响对运动目标的进一步处理和分析首先利用统计的方法得到背景模型,并实时地对背景模型进行更新以适应光线变化和场景本身的变化,用形态学方法和检测连通域面积进行后处理,消除噪声和背景扰动带来的影响,在HSV色度空间下检测阴影,得到准确的运动目标。 背景模型提取 前提假设在背景模型提取阶段,运动目标在场景区域中运动,不会长时间停留在某一位置视频流中某一像素点只有在前景运动目标通过时,它的亮度值才发生大的变化,在一段时间内,亮度值主要集中在很小的一个区域中,可以用这个区域内的平均值作为该点的背景值。具体实现过程:在YUV颜色空间下,Y值的变化范围为0~255,将该范围划分成若干区间[0,T][T,2T]…[Nt,255],n=255/T,对于每个像素点,统计一段时间内每个区间内亮度值的出现的次数。找出出现次数最多的那个区间,将该区间内所有值的平均值作为背景模型在该点的亮度值。这种方法不受前景运动目标的影响。 运动目标检测 检测当前图像和背景图像中对应像素点的差异,如果差值大于一定阈值,则判定该像素为前景运动目标
视觉传达日本研究计划书范文 篇一:《视觉传达的设计》学生课题 视觉传达的设计 一.课题的提出: 随着课程改革的不断发展,视觉传达设计(VisualCommunication Design)以某种目的为先导的,通过可视的艺术形式传达一些特定的信息到被传达对象,并且对被传达对象产生影响的过程。例1:外观设计:建筑,工业产品。例2:宣传:机构形象的推广,商业广告等。在中国与世界上很多国家,视觉传达设计一词被等同于平面设计,在大学专业划分里,这也是平面设计方向的学科而广于图形设计。视觉传达设计的设计师一般也称为平面设计师,并且与工业设计师,服装设计师,网页设计者,IT工作者,有区别。 二.课题的界定:
设计师是信息的发送者,传达对象是信息的接受者。简称为视觉设计。视觉传达包括:“视觉符号”和“传达”这两个基本概念。所谓“视觉符号”,顾名思义就是指人类的视觉器官――眼睛所能看到的能表现事物一定性质的符号,如摄影、电视、电影、造型艺术、建筑物、各类设计、城市建筑以及各种科学、文字,也包括舞台设计、音乐、纹章学、古钱币等都是用眼睛能看到的,它们都属于视觉符号。 三.科研课题目标,达成效果 1. 应用互动反馈技术,合理巧妙的设计按点。 2. 课堂教学中如何处理反馈生成。 四.研究的阶段及内容: 我们各小组,积极参与研究互动反馈技术,在本学期,我们上了这样几节互动反馈的课。 第一阶段2011年9月-10月提出课题 1.通过理论学习,集体研讨,确定课
题。 2.制定计划,提出初步的课题和具体研究内容。 第二阶段2011年10月-11月第一轮实践课并修改研究方案 1.本阶段,在课堂上,精心设计单选按点,解决课堂上的重难点。 2.尝试新一代互动反馈系统,用更多灵活方法去给出问题。 第三阶段2011年11月—12月第二轮课实践,总结研究的成果,提出需要解决的问题。 1.熟练单选设计,尝试抢权、挑人等更多形式设计按点。 第四阶段2011年12月交流反思,完成阶段性报告。 五、研究的方法:集体研究、行动研究、案例研究 本组的特色: 1. 学习相关的知识,提升自己 2. 集体研究:互相听评课 抓住时机,提高效率。
数字水印技术 一、引言 随着互联网广泛普及的应用,各种各样的数据资源包括文本、图片、音频、视频等放在网络服务器上供用户访问。但是这种网络资源的幵放也带了许多弊端,比如一些用户非法下载、非法拷贝、恶意篡改等,因此数字媒体内容的安全和因特网上的侵权问题成为一个急需解决的问题。数字水印作为一项很有潜力的解决手段,正是在这种情况下应运而生。 数字水印(技术是将一些代表性的标识信息,一般需要经过某种适合的变换,变换后的秘密信息(即数字水印),通过某种方式嵌入数字载体(包括文档、音频、软件等)当中,但不影响原载体的使用价值,也不容易被人的知觉系统(如视觉或听觉系统)觉察或注意到。通过这些隐藏在载体中的信息,可以达到确认内容创建者、购买者、传送隐秘信息或者判断载体是否被篡改等目的。在发生产权和内容纠纷时,通过相应的算法可以提取该早已潜入的数字水印,从而验证版权的归属和内容的真伪。 二.算法原理 2.1、灰度图像水印 2.1.1基本原理 处理灰度图像数字水印,采用了LSB(最低有效位)、DCT变换域、DWT变换域三种算法来处理数字水印。在此过程中,处理水印首先将其预处理转化为二值图像,简化算法。 (1)LSB算法原理:最低有效位算法(Least Sig nificant Bit , LSB)是很常见的空间域信息隐藏算法, 该算法就是通过改变图像像素最不重要位来达到嵌入隐秘信息的效果, 该方法隐藏的信息在人的肉眼不能发现的情况下, 其嵌入方法简单、隐藏信息量大、提取方法简单等而获得广泛应用。LSB 信息嵌入过程如下: S′=S+f S ,M 其中,S 和S′分别代表载体信息和嵌入秘密信息后的载密信息;M为待嵌入的秘密信息, 而隐写分析则是从S′中检测出M以至提取M 。 (2)DCT算法原理:DCT 变换在图像压缩中有很多应用,它是JPEG,MPEG 等数据
Bumblebee 双目测量基本原理 一.双目视觉原理: 双目立体视觉三维测量是基于视差原理。 图 双目立体成像原理 其中基线距B=两摄像机的投影中心连线的距离;相机焦距为f 。 设两摄像机在同一时刻观看空间物体的同一特征点(,,)c c c P x y z ,分别在“左眼”和“右眼”上获取了点P 的图像,它们的图像坐标分别为(,)left left left p X Y =,(,)right right right p X Y =。 现两摄像机的图像在同一个平面上,则特征点P 的图像坐标Y 坐标相同,即 left right Y Y Y ==,则由三角几何关系得到: () c left c c rig h t c c c x X f z x B X f z y Y f z ?=???-=???=? ? (1-1) 则视差为:left right D isparity X X =-。由此可计算出特征点P 在相机坐标系下的三维坐标为: left c c c B X x D isp a rity B Y y D isp a rity B f z D isp a rity ? =???= ?? ?= ?? (1-2) 因此,左相机像面上的任意一点只要能在右相机像面上找到对应的匹配点,就可以确定出该点的三维坐标。这种方法是完全的点对点运算,像面上所有点只要存在相应的匹配点,
就可以参与上述运算,从而获取其对应的三维坐标。 二.立体视觉测量过程 1.图像获取 (1) 单台相机移动获取 (2) 双台相机获取:可有不同位置关系(一直线上、一平面上、立体分布) 2.相机标定:确定空间坐标系中物体点同它在图像平面上像点之间的对应关系。 (1)内部参数:相机内部几何、光学参数 (2)外部参数:相机坐标系与世界坐标系的转换 3.图像预处理和特征提取 预处理:主要包括图像对比度的增强、随机噪声的去除、滤波和图像的增强、伪彩色处理等; 特征提取:常用的匹配特征主要有点状特征、线状特征和区域特征等 4.立体匹配:根据对所选特征的计算,建立特征之间的对应关系,将同一个空间物理点在不同图像中的映像点对应起来。 立体匹配有三个基本的步骤组成:1)从立体图像对中的一幅图像如左图上选择与实际物理结构相应的图像特征;2)在另一幅图像如右图中确定出同一物理结构的对应图像特征;3)确定这两个特征之间的相对位置,得到视差。其中的步骤2是实现匹配的关键。 5.深度确定 通过立体匹配得到视差图像之后,便可以确定深度图像,并恢复场景3-D信息。 三.Triclops库中的数据流程 Triclops库中的数据流程如下图所示。系统首先从相机模型中获得raw格式的图像,最终将其处理成深度图像。在系统中有两个主要的处理模块。第一个处理模块是一个应用了低通滤波、图像校正和边缘检测的预处理模块。第二个处理模块用来做立体匹配、结果确认和亚像素插值。最后的处理结果就是一幅深度图像。 1.预处理(Pre-processing)
服装设计教学计划 篇一:服装设计教学计划 《服装设计》课程教学计划 第一部分说明 一、教学目的、任务 服装对于人具有保护与美化的功能,属于产品设计的范畴,又属于视觉传达设计范畴;在自然与社会之间,人的着装又构成环境要素。所以开设这门课的目的在于提高学生的综合设计能力。该课程通过对服装设计的风格定位及流行因素,设计理念,表现方式的学习与研究,使学生在短时间内掌握服装设计的一般规律,了解流行的来源及服装风格与设计方向,引导学生的知识结构向多元化发展,提高学生的综合设计素养。 二、教学的具体要求 (一)了解服装设计的基本概念和设计原理。 (二)掌握服装设计定位和程序。 (三)具备设计意图的表达能力与立体造形能力。 三、教学中应注意的几个问题 (一)辅以大量服装发展史上的经典作品来讲解设计理念和方法,并作设计要素的基本练习,使学生由一般性鉴赏上升到一定理论高度去认识服装的社会性、时代性、人文性。
(二)安排学生进行一到两次市场调研,了解市场某些优秀品牌的设计定位及设计风格,同时了解和熟悉服装材料。也可以到服装厂实地参观,了解服装制作的工艺流程。 (三)注重从理论到实践,从课堂到市场,使学生在短时间内体验从设计构思到做出成品的全过程。锻炼学生的动手能力和社会实践能力。 四、教学效果检查 本课程在高中一年级第二学期开设,(:服装设计教学计划)共160学时,课程结束通过考试方式,成绩分平时成绩和期末考试两部分组成,评定该课程成绩。 五、教学时数分配 第二部分讲授大纲 第一章关于服装设计 一、目的要求 (一)了解服装设计的内涵。 (二)明确服装设计的意义。 二、讲授内容 (一)服装、服饰、成衣、时装的概念 (二)服装设计的研究范畴 (三)服装设计的审美特征 (四)服装设计与社会文化 第二章服装设计的形式法则及其规律
机器人视觉论文 论文题目:基于opencv的手势识别院系:信息科学与工程学院 专业:信号与信息处理 姓名:孙竟豪 学号:21160211123
摘要 文中介绍了一种易于实现的快速实时手势识别算法。研究借助计算机视觉库OpenCV和微软Visual Studio 2008 搭建开发平台,通过视频方式实时提取人的手势信息,进而经二值化、膨胀腐蚀、轮廓提取、区域分割等图像处理流程甄别出当前手势中张开的手指,识别手势特征,提取出人手所包含的特定信息,并最终将手势信息作为控制仪器设备的操作指令,控制相关设备仪器。 0、引言 随着现代科技的高速发展及生活方式的转变,人们越发追求生活、工作中的智能化,希望享有简便、高效、人性化的智能操作控制方式。而伴随计算机的微型化,人机交互需求越来越高,人机友好交互也日益成为研发的热点。目前,人们已不仅仅满足按键式的操作控制,其目光已转向利用人体动作、表情变化等更加方便、友好、直观地应用智能化交互控制体系方面。近年来,国内外科学家在手势识别领域有了突破性进展。1993 年B.Thamas等人最先提出借助数据手套或在人手粘贴特殊颜色的辅助标记来进行手势动作的识别,由此开启了人们对手势识别领域的探索。随后,手势识别研究成果和各种方式的识别方法也纷然出现。从基于方向直方图的手势识别到复杂背景手势目标的捕获与识别,再到基于立体视觉的自然手势识别,每次探索都是手势识别领域内的重大突破。 1 手势识别流程及关键技术 本文将介绍一种基于 OpenCV 的实时手势识别算法,该算法是在现有手势识别技术基础上通过解决手心追踪定位问题来实现手势识别的实时性和高效性。 基于 OpenCV 的手势识别流程如图 1 所示。首先通过视频流采集实时手势图像,而后进行包括图像增强、图像锐化在内的图像预处理,目的是提高图像清晰度并明晰轮廓边缘。根据肤色在 YCrCb 色彩空间中的自适应阈值对图像进行二值化处理,提取图像中所有的肤色以及类肤色像素点,而后经过膨胀、腐蚀、图像平滑处理后,祛除小块的类肤色区域干扰,得到若干块面积较大的肤色区域; 此时根据各个肤色区域的轮廓特征进行甄选,获取目标手势区域,而后根据目标区域的特征进行识别,确定当前手势,获取手势信息。
视觉传达设计专业建设总结 2017年4月 视觉传达设计专业建设总结 一、办学特色: 为适应我省经济、文化发展的需要,适应提高我省全体公民素质教育的需要,面向我省的视觉传达设计人才的需要,以培养全面的具有现代视觉传达设计创作、设计、教学能力的高水平视觉传达设计人才为目标,培养和塑造人才。具体作法:坚持厚基础、宽口径、重实践;坚持课堂教学与社会经济建设中的实际课题相结合,使学生在掌握本专业知识的同时,能有机地将自己所学和市场结合起来。 二、师资队伍建设方面 本专业拥有一支教学经验丰富、整体结构合格并具有较高综合素质的师资团队,能满足专业教学和科研需要,有利于本专业的持续发展。目前,本专业拥有专任教师10人,其中教授1人、副教授2人、讲师6人,助教1人,高级职称教师占专任教师总数的30%。专职教师全部为本科以上学历,其中硕士学位9人,硕士以上专人教师占90%。本专业专业教师均来自全国各地及境外校院,其中清华大学2人、厦门大学1人、四川美术学院1人、西南交通大学1人、东南大学1人、河北师范大学1人、天津美术学院1人、河北工业大学1人、韩国岭南大学1人,非本校比例100%学缘结构合理。10名教师中,50-40岁2名,40岁以下8名,10岁以下教师比例占80%,教师队伍年轻化是该专业教师的最大特点,也特别适合视觉传达设计专业的特点。40岁左右的教师中已经在业务上变得更加成熟,学术上已有一定社会影响,这些教师已经成为该专业的学术带头人。学术梯队合理,有学术带头人,学术骨干年轻化。
专业课和专业基础课教师能满足教学需要,并且每门专业课配有讲师以上职称2人,专业基础课每门配讲师以上职称1-3人。专业基础课及专业课主讲教师共10人,其中已获得副教授以上职称的教师为3人,占总数的30%。目前,本专业教师10名,在校学生105名,生师比:10.5:1。 为了更好地贯彻学校教职工进修培训和参加学术活动的有关规定,保障教学科研工作的有序进行,根据学校有关规定和艺术学院实际情况,我院特制定了《艺术学院教师外出进修培训和参加学术活动管理办法》,鼓励老师们参加各种形式的进修培训和教学科研学术活动,以及服务社会活动。 由于我专业年轻教师较多,而且该专业知识更新较快,结合企业目前的发展状况和采用的新型设计技术,针对该专业所开课程,制定了2015-2020年教师进修计划,已全部落实到人,目前已完成3名教师赴国内外高校进修或访学,王永瑞老师2016年9月至2017年3月赴首都师范大学单科进修,主修数字媒体设计与制作课程,邢晓静老师参加2015年中央文化管理干部学院“文化部财政部文化产业创意创业人才扶持计划”进修项目,2017年国家艺术基金“两岸文化艺术设计高端管理人才”进修项目,郝静老师参加教育部“国培计划”培训团队研修项目,并逐一进行了落实,培训效果良好。 艺术学院非常重视青年教师的培养,坚持“传、帮、带”的青年教师导师制度,签订青年教师导师责任状,促进青年教师迅速成长。此外,为进一步深化课程教学改革,促进全院教师深入开展课堂教学改革交流,鼓励青年教师创新教学方法和手段,提高教学质量,学院还定期举办“青年教师教师基本功大赛”,对获得优秀的教师给以奖励,重点培养推荐参加更高级别的教学大赛,以此激励青年教师不断提高业务水平。本专业青年教师获得全国多媒体课件大赛一等奖,这是学院政策鼓励与重视的最好印证。 本专业专任教师秉持“教研并进”理念,在完成教学任务的同时积极开展科研工作。近年来,共承担立项课题10项,其中省部级2项、厅级5项,校级2项。除部分新分教师外,其教师均具有科研能力,并有科研成果或作品发表,参加教学科研的人数达85%。专业教师均逐渐形成了自身相对稳定的研究方向,尤其在地域文化元素、非物质文化遗产方面的研究和教学方面取得了较丰硕的研究成果,发表了一批有质量的研究论文。近年来本专业教师共公开发表论文10篇。其中核心刊物6篇。有了科研成果的积累,我院视觉传达设计专业教师传授的不仅仅是既有知识和前人的成果,同时也将教师研究的最新学术成果引入到教学中来,创造性地开展教学工作,提升了教学水平和培养质量。 为了更好的提高教学质量,根据专业特点视觉传达专业教师,在完成本职工作的同时,
X X X X大学 研究生考查课 作业 课程名称:智能控制理论与技术 研究生姓名:学号: 作业成绩: 任课教师(签名) 交作业日时间:2010年12月22日
人工神经网络(artificial neural network,简称ANN)是在对大脑的生理研究的基础上,用模拟生物神经元的某些基本功能元件(即人工神经元),按各种不同的联结方式组成的一个网络。模拟大脑的某些机制,实现某个方面的功能,可以用在模仿视觉、函数逼近、模式识别、分类和数据压缩等领域,是近年来人工智能计算的一个重要学科分支。 人工神经网络用相互联结的计算单元网络来描述体系。输人与输出的关系由联结权重和计算单元来反映,每个计算单元综合加权输人,通过激活函数作用产生输出,主要的激活函数是Sigmoid函数。ANN有中间单元的多层前向和反馈网络。从一系列给定数据得到模型化结果是ANN的一个重要特点,而模型化是选择网络权重实现的,因此选用合适的学习训练样本、优化网络结构、采用适当的学习训练方法就能得到包含学习训练样本范围的输人和输出的关系。如果用于学习训练的样本不能充分反映体系的特性,用ANN也不能很好描述与预测体系。显然,选用合适的学习训练样本、优化网络结构、采用适当的学习训练方法是ANN的重要研究内容之一,而寻求应用合适的激活函数也是ANN研究发展的重要内容。由于人工神经网络具有很强的非线性多变量数据的能力,已经在多组分非线性标定与预报中展现出诱人的前景。人工神经网络在工程领域中的应用前景越来越宽广。 1人工神经网络基本理论[1] 1.1神经生物学基础 可以简略地认为生物神经系统是以神经元为信号处理单元,通过广泛的突触联系形成的信息处理集团,其物质结构基础和功能单元是脑神经细胞即神经元(neu ron)。(1)神经元具有信号的输入、整合、输出三种主要功能作用行为。突触是整个神经系统各单元间信号传递驿站,它构成各神经元之间广泛的联接。(3)大脑皮质的神经元联接模式是生物体的遗传性与突触联接强度可塑性相互作用的产物,其变化是先天遗传信息确定的总框架下有限的自组织过程。 1.2建模方法 神经元的数量早在胎儿时期就已固定,后天的脑生长主要是指树突和轴突从神经细胞体中长出并形成突触联系,这就是一般人工神经网络建模方法的生物学依据。人脑建模一般可有两种方法:①神经生物学模型方法,即根据微观神经生物学知识的积累,把脑神经系统的结构及机理逐步解释清楚,在此基础上建立脑功能模型。②神经计算模型方法,即首先建立粗略近似的数学模型并研究该模型的动力学特性,然后再与真实对象作比较(仿真处理方法)。 1.3概念 人工神经网络用物理可实现系统来模仿人脑神经系统的结构和功能,是一门新兴的前沿交叉学科,其概念以T.Kohonen.Pr的论述最具代表性:人工神经网络就是由简单的处理单元(通常为适应性)组成的并行互联网络,它的组织能够模拟生物神经系统对真实世界物体所作出的交互反应。 1.4应用领域 人工神经网络在复杂类模式识别、运动控制、感知觉模拟方面有着不可替代的作用。概括地说人工神经网络主要应用于解决下述几类问题:模式信息处理和模式识别、最优化问题、信息的智能化处理、复杂控制、信号处理、数学逼近映射、感知觉模拟、概率密度函数估计、化学谱图分析、联想记忆及数据恢复等。 1.5理论局限性 (1)受限于脑科学的已有研究成果由于生理试验的困难性,目前对于人脑思维与记忆机制的认识尚很肤浅,对脑神经网的运行和神经细胞的内部处理机制还没有太多的认识。 (2)尚未建立起完整成熟的理论体系目前已提出的众多人工神经网络模型,归纳起来一般都是一个由节点及其互连构成的有向拓扑网,节点间互连强度构成的矩阵可通过某种学
《计算机视觉》复习题 1、利用MFC及OpenCV 库函数编写对话框程序,添加按钮实现图像读入、图像阈值分割、边缘提取等功能(至少实现三个以上功能)。(考前做好并用A4纸打印,考试当天带来) 为旋转不变算子,即当图像()v,u f旋转后,计算值在对应点保持不变。 2、证明Laplace算子 理论 3、计算机视觉研究的目的是什么?它和图像处理及计算机图形学的区别和联系是什么? 从20世纪50年代末开始,计算机开始被作为实现人类智能和人类感知的工具,借助计算机人类第一次可以象借助机械实现对体力的延伸一样实现对脑力和感知能力的延伸。对人类视觉感知能力的计算机模拟导致了计算机视觉的产生。计算机视觉就是用各种成像系统代替视觉器官作为输入敏感手段,由计算机来替代大脑完成处理和解释。计算机视觉使用的理论方法主要是基于几何、概率和运动学计算与三维重构的视觉计算理论。 具体地讲,计算机视觉要达到的基本目的有以下几个: 根据一幅或者多幅二维图像计算出观测点到目标物体的距离; 根据一幅或者多幅二维图像计算出观测点到目标物体的运动参数; 根据一幅或者多幅二维图像计算出观测点到目标物体的表面物理特征; 根据多幅二维投影图像恢复出更大空间区域的投影图像。 简单来说,计算机视觉要达到的最终目的是实现利用计算机对三维景物世界的理解,即实现人的视觉系统的某些功能。从本质上来讲,计算机视觉研究就是利用二维投影图像来重构三维物体的可视部分。 计算机视觉和图像处理及计算机图形学的区别和联系: 区别: 图像处理(image processing)通常是把一幅图像变换为另外一幅图像。它输入的是图像,输出的也是图像。Photoshop中对一幅图像应用滤镜就是典型的一种图像处理。常见操作有模糊、灰度化、增强对比度。 计算机图形学(Computer Graphics)是借助计算机来研究图形表达、处理图像、显示生成的学科。,主要通过几何基元,如线、圆和自由曲面等,来生成图像,属于图像综合。输入的是对虚拟场景的描述,通常为多边形数组,输出的是图像,即二维像素数组。
X X X X 大学 研究生考查课 作业 课程名称:智能控制理论与技术 研究生姓名:学号: 作业成绩: 任课教师(签名) 交作业日时间:2010 年12 月22 日
人工神经网络(artificial neural network,简称ANN)是在对大脑的生理研究的基础上,用模拟生物神经元的某些基本功能元件(即人工神经元),按各种不同的联结方式组成的一个网络。模拟大脑的某些机制,实现某个方面的功能,可以用在模仿视觉、函数逼近、模式识别、分类和数据压缩等领域,是近年来人工智能计算的一个重要学科分支。 人工神经网络用相互联结的计算单元网络来描述体系。输人与输出的关系由联结权重和计算单元来反映,每个计算单元综合加权输人,通过激活函数作用产生输出,主要的激活函数是Sigmoid函数。ANN有中间单元的多层前向和反馈网络。从一系列给定数据得到模型化结果是ANN的一个重要特点,而模型化是选择网络权重实现的,因此选用合适的学习训练样本、优化网络结构、采用适当的学习训练方法就能得到包含学习训练样本范围的输人和输出的关系。如果用于学习训练的样本不能充分反映体系的特性,用ANN也不能很好描述与预测体系。显然,选用合适的学习训练样本、优化网络结构、采用适当的学习训练方法是ANN的重要研究内容之一,而寻求应用合适的激活函数也是ANN研究发展的重要内容。由于人工神经网络具有很强的非线性多变量数据的能力,已经在多组分非线性标定与预报中展现出诱人的前景。人工神经网络在工程领域中的应用前景越来越宽广。 1人工神经网络基本理论[1] 1. 1神经生物学基础 可以简略地认为生物神经系统是以神经元为信号处理单元, 通过广泛的突触联系形成的信息处理集团, 其物质结构基础和功能单元是脑神经细胞即神经元(neu ron)。(1) 神经元具有信号的输入、整合、输出三种主要功能作用行为。突触是整个神经系统各单元间信号传递驿站, 它构成各神经元之间广泛的联接。(3) 大脑皮质的神经元联接模式是生物体的遗传性与突触联接强度可塑性相互作用的产物, 其变化是先天遗传信息确定的总框架下有限的自组织过程。 1. 2建模方法 神经元的数量早在胎儿时期就已固定,后天的脑生长主要是指树突和轴突从神经细胞体中长出并形成突触联系, 这就是一般人工神经网络建模方法的生物学依据。人脑建模一般可有两种方法: ①神经生物学模型方法, 即根据微观神经生物学知识的积累, 把脑神经系统的结构及机理逐步解释清楚, 在此基础上建立脑功能模型。②神经计算模型方法, 即首先建立粗略近似的数学模型并研究该模型的动力学特性, 然后再与真实对象作比较(仿真处理方法)。 1. 3概念 人工神经网络用物理可实现系统来模仿人脑神经系统的结构和功能, 是一门新兴的前沿交叉学科, 其概念以T.Kohonen. Pr 的论述最具代表性: 人工神经网络就是由简单的处理单元(通常为适应性) 组成的并行互联网络, 它的组织能够模拟生物神经系统对真实世界物体所作出的交互反应。 1. 4应用领域 人工神经网络在复杂类模式识别、运动控制、感知觉模拟方面有着不可替代的作用。概括地说人工神经网络主要应用于解决下述几类问题: 模式信息处理和模式识别、最优化问题、信息的智能化处理、复杂控制、信号处理、数学逼近映射、感知觉模拟、概率密度函数估计、化学谱图分析、联想记忆及数据恢复等。 1. 5理论局限性 (1) 受限于脑科学的已有研究成果由于生理试验的困难性, 目前对于人脑思维与记忆机制的认识尚很肤浅, 对脑神经网的运行和神经细胞的内部处理机制还没有太多的认识。 (2) 尚未建立起完整成熟的理论体系目前已提出的众多人工神经网络模型,归纳起来一般都是一个由节点及其互连构成的有向拓扑网, 节点间互连强度构成的矩阵可通过某种学
计算机测量与控制.2013.21(7) Computer Measurement &Control ·1775 · 收稿日期:2012-11-25; 修回日期:2013-01-23。 基金项目:油气管道受阻瞬态流时空演化规律及智能控制方法研究 (50905186)。 作者简介:张 蓬(1963-),女,北京人,副教授,主要从事机械电子 工程,机器人控制技术方向的研究。 文章编号:1671-4598(2013)07-1775-04 中图分类号:TP391.4文献标识码:A 机器人双目立体视觉测距技术研究与实现 张 蓬,王金磊,赵 弘 (中国石油大学(北京)机械与储运工程学院,北京 102249) 摘要:机器人视觉是一种重要的机器人传感技术,主要应用于机器人定位和检测之中;文章阐述了构建机器人双目立体视觉测距系统的方法,并运用Labview对所设计的系统加以实现;完成了图像的采集、预处理和边缘检测;通过在Labview中的C语言接口调用C算法程序,进行了物体特征识别和目标物体测距的算法实现;实验表明焦距、滤波算法和外围光源都会对测量结果会产生较大影响;在相同检测距离不同焦距时得到的检测精度会有一些偏差;并且加入低通滤波,可增加图像识别的精度,进而使特征点匹配和检测的精度都有所提高,对提高系统的检测精度具有实际意义。 关键词:移动机器人;图像识别;测距;双目立体视觉 Research and Implementation of Robotic Binocular Visual Distance Measuring Technology Zhang Peng,Wang Jinlei,Zhao Hong (China University of Petroleum,Beijing 102249,China) Abstract:Robot vision is an important part of the robot sensing technology,mainly used in robot localization and detection.This paperdescribes a method to build a robot binocular stereo visual distance measurement,and uses Labview tool to design and implement a system.The system has functions of the image acquisition,pre-processing and image edge detection.By using C language interface in Labview,Calgorithm can be used for object features identify and target objects ranging.Experiments show that the focal length,the filter algorithm andperipheral light source have a greater impact on the measurement results.Detection accuracy in the same detection distance and different focallengths has a few of deviation.And adding a low-pass filter can increase the accuracy of identification of the image.Then feature pointsmatching and detection accuracy have improved.It has practical significance to improve the detection accuracy of the system.Key words:mobile robots;distance measuring;binocular stereo vision 0 引言 机器人视觉又称为计算机视觉,是一门研究通过图像数据 观察世界的学科。机器人借助各种传感装置(如摄像头,声 纳,里程计,光电编码器等)获取周围场景的图像信息,以感 知和恢复周围的三维环境中的物体的几何形态、颜色、相对位 置、安放姿态和运动等信息,并通过对客观世界的描述,感知 和解释,经过机器人智能运算完成需要完成的任务[1]。机器人 的双目立体视觉技术是基于模仿人眼与人类视觉的立体感知过 程,从两个视点观察同一景物,以获取不同视角下的感知图 像,通过三角测量原理计算图像像素间的位置偏差,以获取景 物的三维信息。双目视觉技术在机器人的定位导航、避障、地 图构建和测距等方面得到了应用。 1 双目立体视觉的系统组成 双目立体视觉是对同一目标的两幅图像提取、识别、匹配 和解释,重建三维环境信息的过程。双目视觉系统通常由图像 采集、摄像机定标、图像预处理、立体匹配和深度图生成等五 大部分组成。 图像采集即通过光学镜头或红外,超声、X射线等对周围场 景和物体进行探测成像,得到关于场景和物体的二维或三维数字 图像[2]。空间点的三维几何位置与其在图像中对应点之间的相互 关系是由摄像机成像的几何模型决定的,而这些几何模型参数就 是摄像机参数,求解这些参数的过程为摄像机定标[3]。图像预处 理是对原始图像进行处理,例如图像滤波、图像增强、边缘检测 等,以便从图像中抽取诸如焦点,边缘,线条,边界以及色彩等 关于成像的基本特征[4]。立体匹配是寻找同一空间景物在不同视 点下投影图像中像素间的一一对应关系,从立体匹配实现的技术 上考虑,立体匹配可以分为基于区域的匹配和基于特征的匹配。 深度图生成即是深度信息的可视化过程。 2 双目立体视觉测距算法 双目立体视觉三维测量是通过计算空间点在两幅图像中的 视差来获取景物的三维坐标值。设空间一点P在世界坐标系 下的坐为(X,Y,Z,1),假设两个相同的平行放置的摄像机 镜头光心距离为B,摄像焦距为f,成像模型如图1所示,摄 像机坐标系的原点O与左摄像机光心O1重合,x1—y与x2— y为两成像平面,因水平轴同线,所以Y轴相同[5]。 以立体空间的一个投影面为例,若左右摄像头成像点坐标 分别为(x1,y),(x2,y),那么该点成像平面如图2所示[6]。 通过图2可知在深度d为: d= Bf x2-x1 (1) 据此原理,则可推导出3个投影面坐标:
1.什么是视知觉? 视觉器官——眼睛接受外界信息的刺激,并由大脑对这些刺激进行加工和解释,从而形成对外界事物的感知和认识。人类通过眼睛感知世界的过程叫做视知觉 2.什么是视觉心理学? 视觉心理学是建立在生物学、心理学方面的研究成果和大量试验的基础上,研究视知觉的心理过程,探索人类“看”的过程中如何积极主动地、有选择性、创造性的进行思维的规律。观看的活动是外部客观事物本身的性质与观看者主体的本性之间的相互作用。 3.人的视觉心理有哪些特征? (1)把握基本特征——形状 人类具有透过少数几个突出的知觉特征见出事物全貌的能力。形状是视觉把握事物的一个最基本的要素,它是事物的外部表象,也是我们视觉器官最容易把握的。 (2)以往经验的作用 新的知觉经验,总是与过去曾知觉到的各种形状的记忆痕迹相联系,过去的一些记忆痕迹总是在互相类似的基础上对新的视觉经验进行干扰。新的知觉经验与过去的形状记忆痕迹相联系,过去的记忆痕迹在相互类似的基础上对新的视觉经验进行干扰。在知觉模糊的形状时,还受语言提示的影响。个人的强烈需求也会使记忆痕迹对知觉产生强烈的影响。 4.什么是格式塔?它的主要理论是什么? 格式塔理论产生于20世纪的德国,是一个心理学派,主要代表人物有惠特海默、珂勒、考夫卡、勒温。格式塔的德文意思是“形式、形状、方式、实质”。反对构造主义心理学关于“对物体的知觉是感知元素的组合”的观点。反对美国行为主义心理学“只重视外在的经验完全忽视内在意识”的观点。知觉是有组织、结构和内在意义的一个整体。当人看到事物时,无须对组成这一事物的各个部分进行分别地分析然后再组合成整体的判断,而是能够直接整体把握事物的知觉结构。格式塔心理学也称为完形心理学。强调经验的重要性,更加重视意识的作用,主张知觉高于感觉的总合,强调经验和行为的整合性。 5.完形法则有哪些? 图与底;形的群化与整合;视觉平衡;恒常性 6.什么是错觉?错觉的分类有哪些? 错视觉是指在视觉感知与客观物理不一致的现象,这种现象被称为错视。错觉不是知觉的错误,而是在正常的知觉下产生出来的视差现象。分类有:不正确的直线、面积对比、明暗对比、不正确的角度、光效应、不存在的空间、图与底两视图。 7.什么是构图? 构图就是指为了表现作品的主题思想和美感效果而如何把人、景、物安排在画面当中以获得最佳布局的方法 8.根据镜头与画面距离,有哪些景别分类?各自的特点和作用是什么? 远景:从远处拍摄,着重表现整体环境和气氛为目的的画面,人物和景物只起到点缀作用; (1)易于表现整个环境和总体气势,不利于交代具体情节和细部。(2)适合表现自然景观和群众活动场面。
初一美术教学计划 美育是素质教育中必不可少的部分,本册初一美术教材以提高学生的艺术素养、弘扬和培育民族精神为宗旨,以培养学生的探究精神和实践能力为着眼点,把欣赏、评述与绘画、手工制作、生活实践结合起来,从而达到开启心智、提升志趣、陶冶情操,增强民族意识、培养爱国情感和审美意识的目的。为了切实有效的落实大纲及教材的要求,特制订教学计划如下: 一、指导思想 以素质教育新课程标准为理论依据和行动准则,切实转变教师与学生的角色,变被动为主动,指导学生进行探究性学习和动手实践练习,提高审美意识和综合素质。、 二、学生现状分析: 作为刚刚步入新学习环境的新生,他们对新的学习环境还不是很了解。初一的学生学习美术的积极性高,积极参与活动的主动性较好,但学生视野狭窄,对美术的认识还远远不够,学生的审美意识较浅,没有一个系统的知识结构。 三、教学方法及学法 1、欣赏评述单元:指导学生课前搜集相关资料,课堂观察、分析、讨论,采用分组讨论、 个人评述等方法,充分发表自己的观点和看法,锻炼观察、分析与表达能力,培养艺术素养和审美意识。 2、造型表现单元:引导学生体会和感受校园的美,进行实地写生,学习与研究表现方法, 讨论与交流心得,培养学生的自主探究与合作意识。 3、设计应用单元:学习美术字及板报等设计知识,指导学生为班级、学校设计板报内容。 锻炼设计思维与动手实践能力,培养合作与交流意识。 4、综合探索单元:引导学生观察、分析生活用品的特点,培养创新精神,锻炼创造性思 维的发展。 四、学习内容及课时安排 1、第一单元(欣赏评述) 活动一欣赏与评述 1
活动二分析与研究 活动三讨论与解释 活动四体验与评价 2、第二单元(造型表现) 活动一欣赏与评述 活动二研讨与实践 活动三创造与评价 3、第三单元(设计应用) 活动一收集与交流—设计标志 活动二学习与练习—设计海报 活动三研究与展示—运动会会场设计 4、第四单元(综合实践) 活动一设计制作 活动二设计布置 活动三制作道具、表演 活动四总结评述 5、第五单元视觉传达设计作品欣赏 五、教学时间安排 期中授完1—2单元,期终授完3—5单元 2