大屏幕拼接控制器 使 用 说 明 书 V1.0 注:在使用产品前,请您仔细阅读此《使用说明书》,并请您妥善保管。
目录 目录............................................................................................................................................................... I 一、安全注意事项 (1) 二、产品概述 (2) 2.1产品分类 (2) 2.2系统拓扑图: (2) 2.3产品特点 (3) 三、硬件结构 (3) 3.1前面板结构 (3) 3.2后面板结构 (3) 四、主要技术参数 (4) 五、控制软件使用说明 (5) 5.1软件安装 (5) 5.2系统启动运行 (5) 5.2.1 软件启动 (5) 5.2.2 通讯连接 (6) 5.2.3连接说明 (6) 5.3窗口操作 (7) 5.3.1 窗口大小和位置 (7) 5.3.2 信源切换 (7) 5.3.3 视频四分割 (8) 5.3.4 窗口关闭和打开 (8) 5.3.5 窗口叠加CBD功能 (9) 5.3.6 自动调整和新建 (9) 5.4模式存储和调用 (9) 5.5矩阵操作 (10) 5.6隐藏的选项 (11) 5.6.1 颜色校正 (11) 5.6.2 属性设置 (12) 六、通讯端口 (12) 6.1RS232连接 (12) 6.2模式调用协议代码 (13) 七、常见问题解答 (14)
一、安全注意事项 危险 设备内有高压,非专业人员不得打开机箱盖,以免发生危险。 警告 1、本设备严禁遭受水滴或水溅,严禁将任何化学品或液体洒在本设备上或置于设备附近; 2、为预防火灾,本设备禁止靠近火源; 3、为了保持通风良好,本设备面板周围至少应保持≧20cm 的空隙; 4、本设备如发出怪异噪音、怪味或冒烟,应立即拔掉电源插头,并与设备供应商联系; 5、严禁带电拔插DVI 信号线缆。 注意 1、使用产品前请仔细阅读本说明书,并妥善保存以备后用; 2、拆开产品包装箱后请对照装箱清单核对实物是否有错漏,如有,请尽快通知设备供应商更换补齐,以免影响您的使用; 3、在有阴雨潮湿天气或长期不用的情况下,请拔掉电源插头; 4、本产品不适合非专业人员操作调试,使用者须接受专业人员指导; 5、不要从本产品通风孔塞入任何物体,以免造成设备损坏或触电; 6、不宜将本产品放置于近水或其它潮湿的地方使用; 7、不宜将本产品放置于散热片或其它高温地方使用; 8、请妥善整理放置电源线,以防破损; 9、如下列情况,应立即拔掉设备电源插头,并通知设备供应商处理: 1)有液体溅入本设备时; 2)本设备被跌落或机箱损坏时; 3)本设备出现明显功能异常或性能变化时。
图像记忆的原理和方法[图像拼接原理及方法] 第一章绪论 1.1 图像拼接技术的研究背景及研究意义 图像拼接(image mosaic)是一个日益流行的研究领域,他已经成为照相绘图学、计算机视觉、图像处理和计算机图形学研究中的热点。图像拼接解决的问题一般式,通过对齐一系列空间重叠的图像,构成一个无缝的、高清晰的图像,它具有比单个图像更高的分辨率和更大的视野。 早期的图像拼接研究一直用于照相绘图学,主要是对大量航拍或卫星的图像的整合。近年来随着图像拼接技术的研究和发展,它使基于图像的绘制(IBR )成为结合两个互补领域——计算机视觉和计算机图形学的坚决焦点,在计算机视觉领域中,图像拼接成为对可视化场景描述(Visual Scene Representaions)的主要研究方法:在计算机形学中,现实世界的图像过去一直用于环境贴图,即合成静态的背景和增加合成物体真实感的贴图,图像拼接可以使IBR 从一系列真是图像中快速绘制具有真实感的新视图。 在军事领域网的夜视成像技术中,无论夜视微光还是红外成像设备都会由于摄像器材的限制而无法拍摄视野宽阔的图片,更不用说
360 度的环形图片了。但是在实际应用中,很多时候需要将360 度所拍摄的很多张图片合成一张图片,从而可以使观察者可以观察到周围的全部情况。使用图像拼接技术,在根据拍摄设备和周围景物的情况进行分析后,就可以将通过转动的拍摄器材拍摄的涵盖周围360 度景物的多幅图像进行拼接,从而实时地得到超大视角甚至是360 度角的全景图像。这在红外预警中起到了很大的作用。 微小型履带式移动机器人项目中,单目视觉不能满足机器人的视觉导航需要,并且单目视觉机器人的视野范围明显小于双目视觉机器人的视野。利用图像拼接技术,拼接机器人双目采集的图像,可以增大机器人的视野,给机器人的视觉导航提供方便。在虚拟现实领域中,人们可以利用图像拼接技术来得到宽视角的图像或360 度全景图像,用来虚拟实际场景。这种基于全景图的虚拟现实系统,通过全景图的深度信息抽取,恢复场景的三维信息,进而建立三维模型。这个系统允许用户在虚拟环境中的一点作水平环视以及一定范围内的俯视和 仰视,同时允许在环视的过程中动态地改变焦距。这样的全景图像相当于人站在原地环顾四周时看到的情形。在医学图像处理方面,显微镜或超声波的视野较小,医师无法通过一幅图像进行诊视,同时对于大目标图像的数据测量也需要把不完整的图像拼接为一个整体。所以把相邻的各幅图像拼接起来是实现远程数据测量和远程会诊的关键 环节圆。在遥感技术领域中,利用图像拼接技术中的图像配准技术可以对同一区域的两幅或多幅图像进行比较,也可以利用图像拼接技术
全景拼接算法简介 罗海风 2014.12.11 目录 1.概述 (1) 2.主要步骤 (2) 2.1. 图像获取 (2) 2.2鱼眼图像矫正 (2) 2.3图片匹配 (2) 2.4 图片拼接 (2) 2.5 图像融合 (2) 2.6全景图像投射 (2) 3.算法技术点介绍 (3) 3.1图像获取 (3) 3.2鱼眼图像矫正 (4) 3.3图片匹配 (4) 3.3.1与特征无关的匹配方式 (4) 3.3.2根据特征进行匹配的方式 (5) 3.4图片拼接 (5) 3.5图像融合 (6) 3.5.1 平均叠加法 (6) 3.5.2 线性法 (7) 3.5.3 加权函数法 (7) 3.5.4 多段融合法(多分辨率样条) (7) 3.6全景图像投射 (7) 3.6.1 柱面全景图 (7) 3.6.2 球面全景图 (7) 3.6.3 多面体全景图 (8) 4.开源图像算法库OPENCV拼接模块 (8) 4.1 STITCHING_DETAIL程序运行流程 (8) 4.2 STITCHING_DETAIL程序接口介绍 (9) 4.3测试效果 (10) 5.小结 (10) 参考资料 (10) 1.概述 全景视图是指在一个固定的观察点,能够提供水平方向上方位角360度,垂直方向上180度的自由浏览(简化的全景只能提供水平方向360度的浏览)。 目前市场中的全景摄像机主要分为两种:鱼眼全景摄像机和多镜头全景摄像机。鱼眼全景摄像机是由单传感器配套特殊的超广角鱼眼镜头,并依赖图像校正技术还原图像的鱼眼全景摄像机。鱼眼全景摄像机
最终生成的全景图像即使经过校正也依然存在一定程度的失真和不自然。多镜头全景摄像机可以避免鱼眼镜头图像失真的缺点,但是或多或少也会存在融合边缘效果不真实、角度有偏差或分割融合后有"附加"感的缺撼。 本文档中根据目前所查找到的资料,对多镜头全景视图拼接算法原理进行简要的介绍。 2.主要步骤 2.1. 图像获取 通过相机取得图像。通常需要根据失真较大的鱼眼镜头和失真较小的窄视角镜头决定算法处理方式。单镜头和多镜头相机在算法处理上也会有一定差别。 2.2鱼眼图像矫正 若相机镜头为鱼眼镜头,则图像需要进行特定的畸变展开处理。 2.3图片匹配 根据素材图片中相互重叠的部分估算图片间匹配关系。主要匹配方式分两种: A.与特征无关的匹配方式。最常见的即为相关性匹配。 B.根据特征进行匹配的方式。最常见的即为根据SIFT,SURF等素材图片中局部特征点,匹配相邻图片中的特征点,估算图像间投影变换矩阵。 2.4 图片拼接 根据步骤2.3所得图片相互关系,将相邻图片拼接至一起。 2.5 图像融合 对拼接得到的全景图进行融合处理。 2.6 全景图像投射 将合成后的全景图投射至球面、柱面或立方体上并建立合适的视点,实现全方位的视图浏览。
控制软件使用说明书 尊敬的用户,首先感谢您选用我司产品,在使用电脑控制大屏之前,请您务必检查串口线是否连接完好,是否已经连接大屏,串口驱动是否安装完毕。 下面是控制软件操作方式及步骤,操作前请您首先阅读操作说明。 1 打开控制软件,如图1: 图1 2 设置拼接形式即现场拼接屏是几X几,拼接形式就改为几x几,点击左上角设置,选择拼接设置(P),如图1为3x3拼接。 图2
3设置通讯设置点击左上角设置,点击通讯设置(C),出现图3界面,如下: 图3 com口选择可通过鼠标挪到我的电脑---右键---设备管理器,查看当前串口线是用的哪个端口, 此时通讯设置里面端口号选择com4即可,其它不必理会;如有连接矩阵,请再在对应矩阵类型如HDMI 矩阵处选择对应的端口号,并将矩阵联动√上,其它矩阵类型不必理会; 4 拼接形式和通讯设置完成后,请点击打开连接,然后点击左下角超级用户,进入工厂菜单,对所有大屏进行ID设置,具体请查阅本文最末ID设置说明; 5 ID设置完成后,就可以对大屏任意拼接和单屏显示了,如要拼接左上角4块屏,信号为HDMI,则选中这4块屏,鼠标放在这4块屏中,右键,然后选择HDMI,即可把这4块屏拼成一个大画面,其它操作类似,如图4所示: 图4
5 矩阵联动以上为一般接分配器时候操作,如果有联动矩阵操作,通讯设置参照第3点说明,然后点击左上角设置,进入矩阵设置(M),如图5所示: 图5 如图4所示,JC-HDMI是某个厂家的矩阵,它的协议在此命名为JC-HDMI,基本上不同厂家的矩阵协议是不一样的,因此在对矩阵联动控制之前,请您确定您手里的控制软件是否已经添加该矩阵协议,通常需要向大屏厂家咨询。完成后按确定退出,进入图6所示界面: 图6 如图5所示,第一和第二行拼接后显示矩阵第二路输入的信号,操作方式:在输入通道处选择IN-2,然后框选第一和第二行,右键,选择HDMI即可。其它矩阵输入通道切换操作类似,都是先选择矩阵输入通道,再选择大屏,即可把某一路矩阵输入图像输出对应大屏上显示。 Ps:1 超级用户密码123321 ,可打开软件菜单,进行ID设置和屏参修改; 2 每一次的参数修改如需保存,或者想保存断电前的某个状态,需点本机保存,5秒左右不要进行其它操作; 3 电源开和电源关为对所选大屏进行开关机操作; 4 保存预案和调取预案功能请咨询相关技术人员; ID设置详细说明: 登录超级用户输入密码123321 进入控制软件工厂菜单选中ID设置—产生识别码。
第一章绪论 1.1图像拼接技术的研究背景及研究意义 图像拼接(image mosaic)是一个日益流行的研究领域,他已经成为照相绘图学、计算机视觉、图像处理和计算机图形学研究中的热点。图像拼接解决的问题一般式,通过对齐一系 列空间重叠的图像,构成一个无缝的、高清晰的图像,它具有比单个图像更高的分辨率和更大的视野。 早期的图像拼接研究一直用于照相绘图学,主要是对大量航拍或卫星的图像的整合。近年来随着图像拼接技术的研究和发展,它使基于图像的绘制( IBR )成为结合两个互补领域 ――计算机视觉和计算机图形学的坚决焦点,在计算机视觉领域中,图像拼接成为对可视化 场景描述(Visual Seene Representaions)的主要研究方法:在计算机形学中,现实世界的图像过去一直用于环境贴图,即合成静态的背景和增加合成物体真实感的贴图,图像拼接可以 使IBR从一系列真是图像中快速绘制具有真实感的新视图。 在军事领域网的夜视成像技术中,无论夜视微光还是红外成像设备都会由于摄像器材的限制而无法拍摄视野宽阔的图片,更不用说360度的环形图片了。但是在实际应用中,很 多时候需要将360度所拍摄的很多张图片合成一张图片,从而可以使观察者可以观察到周围的全部情况。使用图像拼接技术,在根据拍摄设备和周围景物的情况进行分析后,就可以将通过转动的拍摄器材拍摄的涵盖周围360度景物的多幅图像进行拼接,从而实时地得到 超大视角甚至是360度角的全景图像。这在红外预警中起到了很大的作用。 微小型履带式移动机器人项目中,单目视觉不能满足机器人的视觉导航需要,并且单目 视觉机器人的视野范围明显小于双目视觉机器人的视野。利用图像拼接技术,拼接机器人双 目采集的图像,可以增大机器人的视野,给机器人的视觉导航提供方便。在虚拟现实领域中,人们可以利用图像拼接技术来得到宽视角的图像或360度全景图像,用来虚拟实际场景。 这种基于全景图的虚拟现实系统,通过全景图的深度信息抽取,恢复场景的三维信息,进而建立三维模型。这个系统允许用户在虚拟环境中的一点作水平环视以及一定范围内的俯视和仰视,同时允许在环视的过程中动态地改变焦距。这样的全景图像相当于人站在原地环顾四 周时看到的情形。在医学图像处理方面,显微镜或超声波的视野较小,医师无法通过一幅图 像进行诊视,同时对于大目标图像的数据测量也需要把不完整的图像拼接为一个整体。所以把相邻的各幅图像拼接起来是实现远程数据测量和远程会诊的关键环节圆。在遥感技术领域中,利用图像拼接技术中的图像配准技术可以对来自同一区域的两幅或多幅图像进行比较,也可以利用图像拼接技术将遥感卫星拍摄到的有失真地面图像拼接成比较准确的完整图像,作为进一步研究的依据。 从以上方面可以看出,图像拼接技术的应用前景十分广阔,深入研究图像拼接技术有着很重 要的意义 1.2图像拼接算法的分类 图像拼接作为这些年来图像研究方面的重点之一,国内外研究人员也提出了很多拼接算 法。图像拼接的质量,主要依赖图像的配准程度,因此图像的配准是拼接算法的核心和关键。根据图像匹配方法的不同仁阔,一般可以将图像拼接算法分为以下两个类型: (1) 基于区域相关的拼接算法。 这是最为传统和最普遍的算法。基于区域的配准方法是从待拼接图像的灰度值出发,对 待配准图像中一块区域与参考图像中的相同尺寸的区域使用最小二乘法或者其它数学方法 计算其灰度值的差异,对此差异比较后来判断待拼接图像重叠区域的相似程度,由此得到待
本文为技术简介,详细算法可以参考后面的参考资料。 1.概述 全景图像(Panorama)通常是指大于双眼正常有效视角(大约水平90度,垂直70度)或双眼余光视角(大约水平180度,垂直90度),在一个固定的观察点,能够提供水平方向上方位角360度,垂直方向上180度的自由浏览(简化的全景只能提供水平方向360度的浏览),乃至360度完整场景范围拍摄的照片。 生成全景图的方法,通常有三种:一是利用专用照相设备,例如全景相机,带鱼眼透镜的广角相机等。其优点是容易得到全景图像且不需要复杂的建模过程,但是由于这些专用设备价格昂贵,不宜普遍适用。二是计算机绘制方法,该方法利用计算机图形学技术建立场景模型,然后绘制虚拟环境的全景图。其优点是绘制全景图的过程不需要实时控制,而且可以绘制出复杂的场景和真实感较强的光照模型,但缺点是建模过程相当繁琐和费时。三是利用普通数码相机和固定三脚架拍摄一系列的相互重叠的照片,并利用一定的算法将这些照片拼接起来,从而生成全景图。 近年来随着图像处理技术的研究和发展,图像拼接技术已经成为计算机视觉和计算机图形学的研究焦点。目前出现的关于图像拼接的商业软件主要有Ptgui、Ulead Cool 360及ArcSoft Panorama Maker等,这些商业软件多是半自动过程,需要排列好图像顺序,或手动点取特征点。 2.全景图类型: 1)柱面全景图 柱面全景图技术较为简单,发展也较为成熟,成为大多数构建全景图虚拟场景的基础。这种方式是将全景图像投影到一个以相机视点为中心的圆柱体内表面,
视线的旋转运动即转化为柱面上的坐标平移运动。这种全景图可以实现水平方向360度连续旋转,而垂直方向的俯仰角度则由于圆柱体的限制要小于180度。柱面全景图有两个显著优点:一是圆柱面可以展开成一个矩形平面,所以可以把柱面全景图展开成一个矩形图像,而且直接利用其在计算机内的图像格式进行存取;二是数据的采集要比立方体和球体都简单。在大多数实际应用中,360度的环视环境即可较好地表达出空间信息,所以柱面全景图模型是较为理想的一种选择。 2)立方体全景图 立方体全景图由六个平面投影图像组成,即将全景图投影到一个立方体的内表面上。这种方式下图像的采集和相机的标定难度较大,需要使用特殊的拍摄装置,依次在水平、垂直方向每隔90度拍摄一张照片,获得六张可以无缝拼接于一个立方体的六个面上的照片。这种方法可以实现水平方向360度旋转、垂直方向180度俯仰的视线观察。 3)球面全景图 球面全景图是指将源图像拼接成一个球体的形状,以相机视点为球心,将图像投影到球体的内表面。与立方体全景图类似,球面全景图也可以实现水平方向360度旋转、垂直方向180度俯仰的视线观察。球面全景图的拼接过程及存储方式较柱面全景图大为复杂,这是因为生成球面全景图的过程中需要将平面图像投影成球面图像,而球面为不可展曲面。因此这是一个平面图像水平和垂直方向的非线性投影过程,同时也很难找到与球面对应且易于存取的数据结构来存放球面图像。目前国内外在这方面提出的研究算法较其他类型全景图少,而且在可靠性和效率方面也存在一些问题。 3.主要内容
基于特征点的图像拼接算法研究指导教师: 学生姓名:学号: 专业:计算机技术 院(系):信息工程学院 完成时间:2013年11月
摘要: 图像拼接(image mosaic)技术是将一组相互间重叠部分的图像序列进行空间匹配对准,经重采样合成后形成一幅包含各图像序列信息的宽视角场景的、完整的、高清晰的新图像的技术。图像拼接的过程由图像获取,图像配准,图像合成三步骤组成。其中图像配准是整个图像拼接的基础。本文研究了基于特征图像配准算法。 利用基于特征Harris角点检测算法提取出初始特征点对,实现实现特征点对的精确匹配。最后用加权平均对实现图像融合。实验证明该算法适应性较强,在重复性纹理、旋转角度比较大等较难自动匹配场合下仍可以准确实现图像配准。同时该算法准确率高,鲁棒性强,具有较高的使用价值。 关键词::图像拼接图像配准特征点图像合成
Abstract: Image mosaic is a technology that carries on the spatial matching to a series of image which are overlapped with each other,and finally builds a seamless and high quality image which has high resolution and big eyeshot.The image mosaic process consists of the following steps.Image acquisition,image registration,image fusion.fusion.Image registration is the important foundation of image mosaic.This article has studied a image registration algorithrm feature-based image registration algorithm. Firstly,corners are extracted using improved Harris operator to extract the initial feature point pairs.Then,the correct matching feature point pairs are used to realize the image registration.Finally,use the Weighted Average Fusion Rule to fuse the images.The experiment results indicate this algorithmhas better registration results under a variety of conditions such as different light,bigger rotation and repetitive texture.At the same time,this algorithm has good effect in image registration,high accurate rate,strong robustness,higher use value. Key words:Image mosaic Image registration Feature points Image fusion
第一章绪论 1.1 图像拼接技术的研究背景及研究意义 图像拼接(image mosaic)是一个日益流行的研究领域,他已经成为照相绘图学、计算机视觉、图像处理和计算机图形学研究中的热点。图像拼接解决的问题一般式,通过对齐一系列空间重叠的图像,构成一个无缝的、高清晰的图像,它具有比单个图像更高的分辨率和更大的视野。 早期的图像拼接研究一直用于照相绘图学,主要是对大量航拍或卫星的图像的整合。近年来随着图像拼接技术的研究和发展,它使基于图像的绘制(IBR)成为结合两个互补领域——计算机视觉和计算机图形学的坚决焦点,在计算机视觉领域中,图像拼接成为对可视化场景描述(Visual Scene Representaions)的主要研究方法:在计算机形学中,现实世界的图像过去一直用于环境贴图,即合成静态的背景和增加合成物体真实感的贴图,图像拼接可以使IBR从一系列真是图像中快速绘制具有真实感的新视图。 在军事领域网的夜视成像技术中,无论夜视微光还是红外成像设备都会由于摄像器材的限制而无法拍摄视野宽阔的图片,更不用说360 度的环形图片了。但是在实际应用中,很多时候需要将360 度所拍摄的很多张图片合成一张图片,从而可以使观察者可以观察到周围的全部情况。使用图像拼接技术,在根据拍摄设备和周围景物的情况进行分析后,就可以将通过转动的拍摄器材拍摄的涵盖周围360 度景物的多幅图像进行拼接,从而实时地得到超大视角甚至是360 度角的全景图像。这在红外预警中起到了很大的作用。 微小型履带式移动机器人项目中,单目视觉不能满足机器人的视觉导航需要,并且单目视觉机器人的视野范围明显小于双目视觉机器人的视野。利用图像拼接技术,拼接机器人双目采集的图像,可以增大机器人的视野,给机器人的视觉导航提供方便。在虚拟现实领域中,人们可以利用图像拼接技术来得到宽视角的图像或360 度全景图像,用来虚拟实际场景。这种基于全景图的虚拟现实系统,通过全景图的深度信息抽取,恢复场景的三维信息,进而建立三维模型。这个系统允许用户在虚拟环境中的一点作水平环视以及一定范围内的俯视和仰视,同时允许在环视的过程中动态地改变焦距。这样的全景图像相当于人站在原地环顾四周时看到的情形。在医学图像处理方面,显微镜或超声波的视野较小,医师无法通过一幅图像进行诊视,同时对于大目标图像的数据测量也需要把不完整的图像拼接为一个整体。所以把相邻的各幅图像拼接起来是实现远程数据测量和远程会诊的关键环节圆。在遥感技术领域中,利用图像拼接技术中的图像配准技术可以对来自同一区域的两幅或多幅图像进行比较,也可以利用图像拼接技术将遥感卫星拍摄到的有失真地面图像拼接成比较准确的完整图像,作为进一步研究的依据。 从以上方面可以看出,图像拼接技术的应用前景十分广阔,深入研究图像拼接技术有着很重要的意义 1.2图像拼接算法的分类 图像拼接作为这些年来图像研究方面的重点之一,国内外研究人员也提出了很多拼接算法。图像拼接的质量,主要依赖图像的配准程度,因此图像的配准是拼接算法的核心和关键。根据图像匹配方法的不同仁阔,一般可以将图像拼接算法分为以下两个类型:(1) 基于区域相关的拼接算法。 这是最为传统和最普遍的算法。基于区域的配准方法是从待拼接图像的灰度值出发,对
液晶拼接屏控制系统 软件说明书
大屏接口介绍 系统参数设置 电视墙序号(ID)设置方法一: 步骤1、使用拼接单元选配的遥控器进入“用户菜单”;(遥控接收头接在第1个拼接单元的RS232OutA或OutB接口,非RS232In接口)步骤2、进入“高级设置”—》拼接设置,根据拼接单元安装的位置,设置相应的电视墙序号。方法二:使用LCDWall控制软件,进入系统设置—》系统调整,设置对应的电视墙序号,步骤见下图。
注:拼接单元安装位置和电视墙序号对应规则如下(图例4行4列拼接): 2、串口设置: 1、程序初次启动时,控制软件LCDWall有串口的操作界面。 2、选择电脑(控制端)相应的串口号,点击打开,确保设备通讯正常。步 骤见 下图。
系统界面说明 软件菜单栏目:可进行软件功能的参数设置。
注: 1、由于软件版本及参数设置不同,菜单功能开放程度不同,请以厂家提供软件为准。 2、用户公司名称区:用户可以设置自已的公司的名称显示在软件上面。 3、拼接单元模拟区:模拟大屏幕墙拼接单元,可进行拼接单元选取操作。 4、窗口:模拟单个拼接显示单元。 5、串口设置区:设置PC机对应的操作串口。 6、幕墙设置区:设置实际电视墙的行数和列数。 7、边框消隐区域:进行物理拼缝的设置和边框消隐功能设定。 8、功能区:可针对单个拼接单元或多个拼接单元进行开/关机、VGA自动调整、信息显示、遥控器操作等多项功能操作。 9、矩阵操作区:可以设置矩阵联动,矩阵独立串口操作、矩阵映射关系等等操作。 10、图像拼接功能操作区:可进行图像拼接、图像分解(还原)等功能操作。 11、用户LOGO显示区,显示用户自已公司的标志。 12、状态显示区:显示用户串口的状态、时间、以及当前用户操作的权限。 四、系统功能设置 1、操作单元选取操作 1、点击鼠标左键选择一个操作窗口,选中窗口呈深蓝色; 2、拖动鼠标左键选择相邻的多个操作窗口,选中窗口呈深蓝色;
图像拼接算法及实现(一) 来源:中国论文下载中心 [ 09-06-03 16:36:00 ] 作者:陈挺编辑:studa090420 论文关键词:图像拼接图像配准图像融合全景图 论文摘要:图像拼接(image mosaic)技术是将一组相互间重叠部分的图像序列进行空间匹配对准,经重采样合成后形成一幅包含各图像序列信息的宽视角场景的、完整的、高清晰的新图像的技术。图像拼接在摄影测量学、计算机视觉、遥感图像处理、医学图像分析、计算机图形学等领域有着广泛的应用价值。一般来说,图像拼接的过程由图像获取,图像配准,图像合成三步骤组成,其中图像配准是整个图像拼接的基础。本文研究了两种图像配准算法:基于特征和基于变换域的图像配准算法。在基于特征的配准算法的基础上,提出一种稳健的基于特征点的配准算法。首先改进Harris角点检测算法,有效提高所提取特征点的速度和精度。然后利用相似测度NCC(normalized cross correlation——归一化互相关),通过用双向最大相关系数匹配的方法提取出初始特征点对,用随机采样法RANSAC(Random Sample Consensus)剔除伪特征点对,实现特征点对的精确匹配。最后用正确的特征点匹配对实现图像的配准。本文提出的算法适应性较强,在重复性纹理、旋转角度比较大等较难自动匹配场合下仍可以准确实现图像配准。 Abstract:Image mosaic is a technology that carries on the spatial matching to a series of image which are overlapped with each other, and finally builds a seamless and high quality image which has high resolution and big eyeshot. Image mosaic has widely applications in the fields of photogrammetry, computer vision, remote sensing image processing, medical image analysis, computer graphic and so on. 。In general, the process of image mosaic by the image acquisition, image registration, image synthesis of three steps, one of image registration are the basis of the entire image mosaic. In this paper, two image registration algorithm: Based on the characteristics and transform domain-based image registration algorithm. In feature-based registration algorithm based on a robust feature-based registration algorithm points. First of all, to improve the Harris corner detection algorithm, effectively improve the extraction of feature points of the speed and accuracy. And the use of a similar measure of NCC (normalized cross correlation - Normalized cross-correlation), through the largest correlation coefficient with two-way matching to extract the feature points out the initial right, using random sampling method RANSAC (Random Sample Consensus) excluding pseudo-feature points right, feature points on the implementation of the exact match. Finally with the correct feature point matching for image registration implementation. In this paper, the algorithm adapted, in the repetitive texture, such as relatively large rotation more difficult to automatically match occasions can still achieve an accurate image registration. Key words: image mosaic, image registration, image fusion, panorama 第一章绪论
松浩科技大屏幕液晶拼接屏产品说明 目录 前言 (2) 产品使用注意事项 (2) 警告及注意事项 (2) 性能指标 (2) 产品介绍 (3) 1.效果图............................................................................................................. 错误!未定义书签。 2.产品主要规格 .................................................................................................. 错误!未定义书签。 3.连接方式 (4) 4.幕墙控制系统操作介绍 (6) 简单故障排除 (5) 附件:进入工厂调地址码 (5)
前言 欢迎选用我公司产品,感您对我公司产品的支持!为了您能更好的使用本产品,使用前请仔细阅读本手册。 大屏幕拼接产品,采用独特的嵌入式结构设计,可接受各种图像信号源输入,直接驱动全系列的大尺寸液晶屏(26寸以上),并经分割、放大后,实时无失真地在各种大屏幕图像拼接墙体上显示。处理过程完全硬件化, 不需要电脑和启动软件等操作,非常简便。画面无延时,无拖尾现象, 自然流畅,画质细腻,最大支持10X10的液晶屏拼接。 液晶图像拼接处理器采用了运动侦测与补偿运算、插运算、边缘平滑处理及杂波信号抑制等尖端处理技术,其3D视频亮色分离电路单元, 3D的逐行处理及帧频归一转化电路单元, 3D数字信号降噪单元,可将普通PAL/NTSC 隔行扫描视频信号采集变为逐行扫描的,高画质、高分辨率的高清电视和计算机图像信号。 液晶图像拼接处理器支持计算机图像信号输入及其显示,可实现最高达1920x1080高分辨率WUXGA输出,支持全系列的大尺寸液晶屏。 系列处理器可以支持多路不同的视频源,同时显示在不同的屏幕上,使用者也可选择一路视频源或RGB信号放大至原始图像的N×M倍,在由显示单元组成的墙体上实现大屏幕拼接显示。 产品使用注意事项 感阁下选择购买并使用本产品,为了您能够更好的使用本产品的所有功能,请您在正式使用本产品前仔细阅读本手册所提及的在产品使用过程中应注意的事项以及详细功能操作说明。 本产品组件符合国家低压电子产品安全标准,并通过美国联邦电磁兼容性FCC认证测试,测试标准为:Part 15 Class B. 本产品机身及包装盒标贴的专有系列标签是产品保修时的重要凭证,当产品需要保修时,用户需出示产品的系列标签。如果标签遭到破坏,无法辨认或撕毁,本公司将不予保修。本产品享有三个月保换,一年免费保修的售后服务。 并非所有的使用环境都适合本产品的使用;本公司仅对产品本身质量按照本公司承诺的保修条款提供售后服务,但对于使用本产品导致的数据资料丢失,或者其他相关责任,本公司不予负责。 因为技术上或者其他外部因素导致本产品设计规格上的变更,本公司将不再另行单独通知。 警告及注意事项 高压危险! 本机有高压,请勿打开机壳,以免触电。维修时应委托专业人员。 不正确的操作方法可能会导致触电或火灾事故,为确保您的安全及彩色液晶电视的使用寿命,请在使用前仔细阅读下述安全注意事项。 ?在使用本机前,必须阅读并理解所有使用指示。 ?必须妥善保存使用说明书,以备将来之需要。 ?必须严格遵守本机其使用说明书上的警告指示。 ?操作时必须遵照所有使用说明。 ?请勿使用制造商没有推荐的附设装置,不恰当地使用设置可能会发生意外故障。 ?在把AC电源线接到电源插座之前,请检查电视规格的电压源要否合适本地电源供应条件,如果您不能确定使用电源的类型,请与经销店或当地的电力部门联系。 ?不要用任何物品压迫或缠绕电源线。破损的电源线会导致触电或引起火灾。 ?请勿试图自行维修本机,由于本机有高压装置和其他易损坏器件,会对人体或电视本身造成各种危害,请务必让专业维修员进行维修。 ?请勿触摸使用说明书中没有提及的控制部件。对使用说明中没有提及的控件部件进行不适当的调整会损坏本机,也会增加专业技术人员的维修工作量。
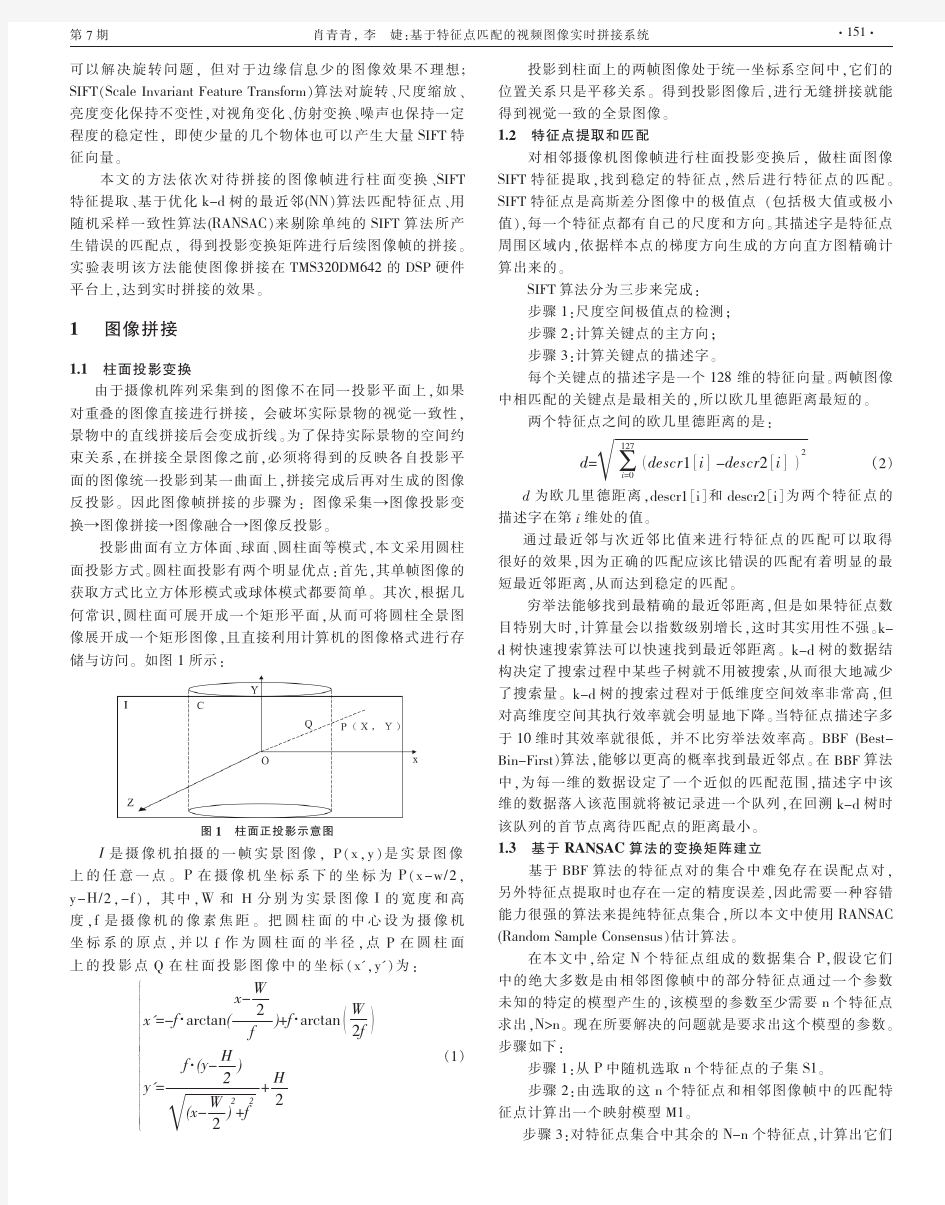
实验目的: 图像拼接的目的是将有衔接重叠的图像拼成一张高分辨率全景图像,它是计 算机视觉、图像处理和计算机图形学等多学科的综合应用技术。图像拼接技术是指将对同一场景、不同角度之间存在相互重叠的图像序列进行图像配准,然后再把图像融合成一张包含各图像信息的高清图像的技术。本实验是根据输入的只有旋转的一系列图像序列,经过匹配,融合后生成一张360度的全景图像。 实验步骤: 下图是实验的流程图,实验大体上分为以下几个步骤: ①特征点提取和sift 描述: 角点检测,即通过查看一个小窗口,即可简单的识别角点在角点上,向任何一个方向移动窗口,都会产生灰度的较大变化, 2 1212()R k λλλλ=-+,通过R 的值的大小来判断是否为角点。H=22x x y y x y I I I I I I ????????,1λ, 输入图像序列 特征点检测 Sift 描述 RANSAC 特征匹配 根据两两匹配求出焦距f 投影到圆柱表面 图像融合 输出图像
为矩阵的两个特征值。实验中的SIFT描述子是对每个角点周围进行4个区域2 进行描述,分别是上下左右四个区域,每个方块大小为5*5,然后对每个方块的每个点求其梯度方向。SIFT方向共有8个方向,将每个点的梯度方向做统计,最后归为8个方向中的一个,得到分别得到sift(k,0),sift(k,1)···sift(k,8),k为方块序列,0-8为方向,共有四个方块,所以生成32维的向量,然后按幅值大小对这32维向量进行排序,并找出最大的作为主方向。 图为角点检测和sift描述后的图 ②.如果直接根据描述子32维向量进行匹配的话,因为噪声的影响,角点检测的 不准确,会导致找出一些错误的匹配对,如何去掉这些错误的匹配呢?RANSAC 算法是基于特征的图像配准算法中的典型算法,其优点是:可靠、稳定、精度高, 对图像噪声和特征点提取不准确,有强健的承受能力,鲁棒性强,并且具有较好 的剔出误匹配点的能力,经常被使用在图像特征匹配中。RANSAC的基础是大多 数的点是正确的,然后在这些正确的点的基础上找出模型,算出其他点和这模型
图像匹配与拼接 分匹配和拼接两部分 一、匹配 当然匹配的方法,有sift,surf什么的,这里主要就介绍一下我自己的方法啦! 特征点提取是必须的,不然搜索范围太大哇!并且可能不可靠,所以特征点提取是必须的。什么点适合做特征点呢?这方面的论文很多啦,主要还是看你用什么方法匹配了,如果是用互相关作为相似性准则的话,那自相关系数随各个方向变化大的点就适合作特征点了,当然还要考虑稳定性,即特征点应该不太受光照、噪声、缩放、旋转等的影响,这样的才是好的特征点。当然,如果确定了应用坏境,不一定要满足不受上四个因素影响的,比如平行的双目匹配、全景图的匹配等,具体问题具体分析吧!角点特征是个人比较喜欢的特征。这里我自己定义了一种局部特征,效果还行,匹配采用互相关为准则的匹配,大概效果如下: 目测这几个匹配点还是正确的哇!在一些应用中,可能需要的匹配点数相当多,这就需要较密集的匹配了。密集的匹配可以根据初始的匹配结果估计搜索范围,这可以加速搜索,同时也要提取更多的特征点呀!话不多说了,下面是密集的匹配:
虽然这样的密度对于三维重构来说还不够,但对于一般的图像拼接来说足够了。匹配完了,下面就要将第二步了。 二、矫正 匹配好两幅图像了,接下来干啥呢?把它们对准呗。可惜了,两幅图像之间不但存在平移,还存在旋转缩放什么的,更复杂的,可能还存在所谓的3D变换,那就复杂啦!不管怎么样,所谓的对准,也就是矫正,总是基于一定的模型的,即基于相机拍摄两幅图像的相对姿态。对于全景图拼接(个人觉得是最简单的且较实用的拼接),需要根据相机焦距或者视场角投影到柱面上,然后两幅图像间的位置就只有一维的平移关系了。但是这对拍摄的相机也是有要求的,就是要保证拍摄两幅图像时,物防焦点是重合的,这样才能根据稀疏的几个点确定所有重叠区域内点的相对位置呀!但实际中很难做到物方焦点重合,比如数码相机或者所谓的智能手机的全景图拍摄,一般人都是拿着相机或者手机绕人旋转,而非绕物方焦点旋转拍摄的,这样拼接起来是绝对有误差的呀!特别是拼接近景,误差就更大了,远景还好。怎么克服这个缺点呢?简单的改进方法就是绕着摄像头旋转吧,虽然这也不是严格绕物方焦距旋转,但起码误差小得多啦,拼接的效果当然也就好得多了,可以试一试哦! 不扯了,第二种模型就是认为两幅图像间存在的变换关系是有2D旋转、缩放、平移的,可以通过一个旋转、缩放、平移矩阵来矫正,这个也不难,但是应用范围却相当有限,不详说了。 第三种模型就是不用模型,或者说认为两幅图像间的对应点存在的是一种线性变换关系,这样只要解一个线性方程组就可以了,似乎也挺简单的。但可惜的是,不是任给的两幅图像间都只存在线性变换呀!它可能是一个3D的线性变换,那就麻烦了,这个必须需要密匹配呀!不然就一定是有误差的,即不能通过稀疏的匹配点来矫正两幅图像的所有对应点的。 还有更多的模型,比如各方位的全景图,需要投影到球面上的哇!不过这个模型也不难。最难的当然是拍摄两幅图像时,相机不同,相机姿态也不同了,这个是很有挑战的,我也很惧怕这个。下面展示三种矫正结果: 1、2D线性模型: 2D矫正,认为匹配点之间存在线性变换,X=ax+by+c,Y=dx+ey+e这样的模型,业内称之放射变换,其中x,y是第一幅点的坐标,X,Y是对应的第二幅图像中的点坐标,使用最小二乘法计算a、b、c、d、e、f,第二幅图相对于第一幅图矫正的结果就是这样的了
文档类别:维护文档 密级:保密 多屏多媒体控制软件使用说明书 文件状态: [√] 草稿 [ ] 正式发布 [ ] 正在修改文件标识: 当前版本:V1.0 作者: 制作单位 完成日期: 审核: 文档修改记录表 版本 /状态修改人修改时间修改内容 V1.0 赵彦超2016-07-01 初始内容
版权所有,翻印必究。除非版权法允许,否则,在事先未经书面许可的情况下,严禁复制、改编或翻译本书。 与此手册相关用户具有以下权力:A:打印本手册以获得其硬盘拷贝,用于个人、内部或公司用途,而不得用于销售、转售或分发目的;B:将本手册仅作为自助产品的维护使用。 文档声明 本文所含信息如有更改,恕不另行通知。本公司不对本书作任何担保。本公司对于由本书所含错误及其供应、性能或使用所造成的意外性或随发性损失概不负责。
目录 第PC软件安装使用说明 (4) 1.1. 软件运行环境 (4) 1.2. 软件安装 (5) 1.3. 软件卸载 (7) 第软件功能介绍 (10) 2.1. 主界面 (10) 2.1.1. (10) 2.1.2. (11) 2.1.3. (12) 2.2. 菜单栏功能 (12) 2.2.1.通讯设置 (13) 2.2.2.拼接设置 (13) 2.2.3.矩阵设置 (14) 2.2.4.开关机设置 (17) 2.2.5 框架效果 (18) 2.2.6 图像调整 (19) 2.2.7 画面静止 (20) 2.2.8 本机保存 (21) 2.2.9 预案功能 (21) 2.2.10 字幕功能 (24) 2.2.11 显示功能 (25) 2.2.12 用户手册 (28) 2.2.13 用户注册 (28) 2.3 工具栏功能 (29) 2.3.1.打开连接和关闭连接 (29) 2.3.2电源开和电源关 (30) 2.3.3输入通道 (30) 2.4. 操作方法 (31) 第超级用户附加功能说明 (32) 3.1. 附加功能 (32) 3.1.1.温度控制 (32) 3.1.2.屏参设置 (32) 3.1.3.ID设置 (32) 3.1.4.重显率 (33) 3.1.5.LOGO (33) 3.1.6.系统配置 (33) 3.1.7.调试窗口 (34) 3.1.8 命令显示 (34) 第常用功能补充 (34) 4.1. 软ID设置功能详细说明 (34) 4.2 用户注册使用说明 (36) 4.3 矩阵协议添加 (41)