
ArduPilot 自动驾驶仪手册
一、简介
系统构成:
1、一块ArduPilot Mega板(红色)
2、一块ArduPilot Mega IMU板(红色)
3、一套 MediaTek GPS 或者 uBlox GPS模块
4、若干根接收机连接线及配套的插线,如果需要使用系统的自动驾驶和功
能,推荐使用8通道接收机
5、一套Xbee数传电台,一块Xbee数传电台与ArduPilot Mega IMU,另一
块通过适配器与PC相连(提醒:因传送的数据量大,推荐配置空中速率
位57600bps的数传电台,低速率数传电台将会导致严重的数据丢包现象)。
仔细阅读本手册,将有利于调试自动驾驶仪。作为一套开源的自动驾驶仪,我们支持第三方传感器的接入,如空速计、电子罗盘等,这意味着您必须对本系统进行正确的参数设置,才能安全飞行。
二、快速入门指南
(一)电路板的组装
所需材料及工具:MEGA 板和IMU板各一块;板件连接插件若干;带
连线的GPS模块(推荐4HZ);烙铁;焊丝等
1、焊接MEGA机IMU板上的元器件
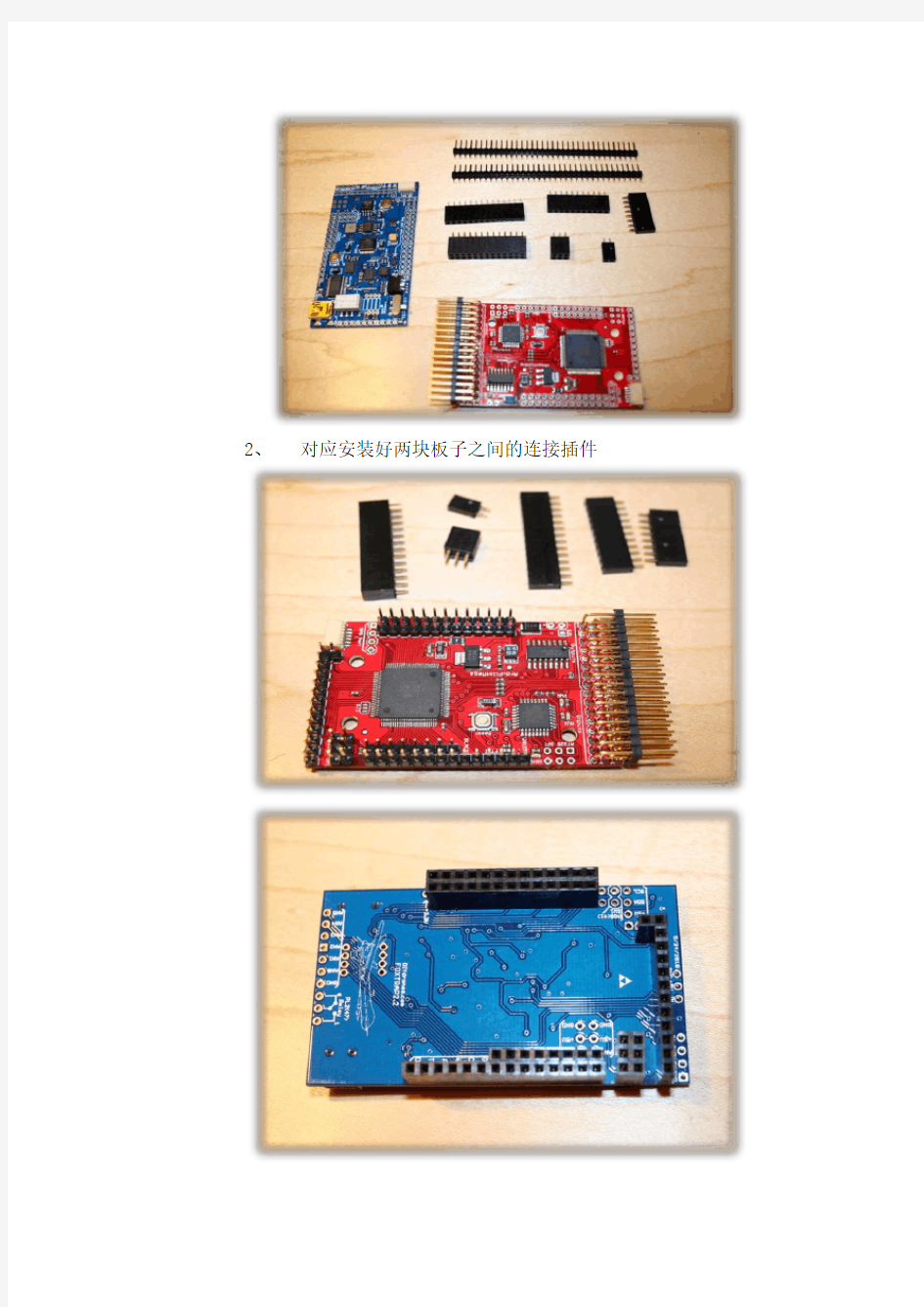
2、对应安装好两块板子之间的连接插件
3、两块板子相插
4、连接GPS模块之后的样子,注意:GPS模块连接在红色MEGA
板子上,而非蓝色IMU板子上的接口,IMU的6芯接口用于连
接诸如电子罗盘等外接传感器。
(二)如何连接
1、系统连接图
其中,自动驾驶仪控制通道为第八通道,利用三段开关进行模式切换。
2、安装示意图
因IMU板载三轴传感器,系统安装时需充分考虑到减震,尽量使其
在飞机上水平安装,且安装方向应如上图所示。
3、DIP开关的使用
因为接收机和配置文件之间会存在差异,可能会导致舵机出
现反向工作,这时你可以通过拨动DIP开关进行修正,而非
通过复杂的参数修改进行修正。
三、编程
(一)所需工具
1、MINI USB数据线,用于ardupilot与PC的相连。
2、配置软件arduino,下载地址https://www.doczj.com/doc/018452987.html,/en/Main/Software
(二)如何通过arduino进行编程
1、通过USB连接arduino与PC,同时根据提示安装FT232RL驱动,并记下
串口号。
2、对系统进行编程及测试
运行刚才下载的Arduino,在菜单TOOLS-SERIAL PORT下选择正确的COM口,同时在BOAD下选择ATMEGA1280。
3、下载如下地址测试用的系统软件,该文件可以让各舵机有规律的转动https://www.doczj.com/doc/018452987.html,/datasheets/DevTools/Arduino/ArduPilotMega _dancing.zip,解压后打开其中的ArduPilotMega_dancing文件,最后点击软件中UPLOAD的图标进行写入,写入时候主板上的指示灯会闪烁
(三)、正式写入APM系统软件
1、到如下地址下载最新系统软件,文件名称为为ArduPilotMega+版本号,https://www.doczj.com/doc/018452987.html,/p/ardupilot-mega/downloads/list
2、下载后解压缩至本地硬盘,用Arduin打开文件夹下的ArduPilotMega目录,选取ArduPilotMega.pde文件,这是软件会自动加载所有的系统文件。
3、部分参数的修改(GPS)
打开APM_Config选项,根据所使用的GPS模块型号进行对应修改,比如采用MTK的模块,那么配置文件就应该修改成GPS_P ROTOCOL_MTK,其他类型的GPS参数修改以此类推,把代码“#”前面的“//”删除,即表示启用本行代码,如下图所示:
注意:如果GPS未接入系统或对应的模块类型错误,将无法正确加载GPS 信息。
4、参数修改好后,既可点击UPLOAD进行参数灌入,此时电路板上的RX/TX
指示灯会闪烁,大约一分钟后数据写入完毕。
四、基本调试
1、通过拨动SW2开关,可对系统进行在线调试,SW2开关拨动到如图所示位置后,需要对主板重新加电。
2、把USB连线插入电脑
3、选择正确的COM口,点击图中的软件按钮
4、确保串口速率为115200bps,并确认返回。
这时,您可以在软件中看到命令输入栏,任何时刻你可以输入“exit”退出调试模式。你可以输入“help”命令,寻求帮助。
初始的命令有:
(1)、“logs”-日志模式
(2)、“setup”-设置模式
(3)、“test”-测试模式
5、安装设置
在安装设置之前,需要把你的接收机对应插入AMP板,并打开电源,并把系统通过三段开关调整到直接飞行模式,同时连接数传电台(如果没有数传电台的话,也可以通过USB转TTL模块与电脑相连,为确保数据传输的稳定,推荐使用FT232RL模块的转接板)和GPS模块。
GPS模块需要放置在空旷的位置,使其能够搜索到卫星并锁定。
在命令框中输入“setup”并回车,进入设置模式。
“设置”模式下允许的命令:
(1)、“reset”——重置系统默认的参数设置
(2)、“radio”——接收机通道设置
(3)、“modes”——接收机对应的通道设置
(4)、“show”——显示当前内存的配置
接收机设置,本设置的目的是让AMP板指导所接入接收机各通道的量程,以
便于三轴平衡控制输出适当的舵量。打开接收机、是AMP板处于直接控制模式,进入到“radio”命令框,这时,拨动副翼、油门、升降舵、方向舵及其他通道,上下左右分别达到满舵,多重复几次后复位。这时系统会记录相对应的位置,如下图:
模式设置(飞行控制模式设置),进入setup下的modes模式,这是你可以看到飞行模式下个控制开关的状态,如果你想改变状态,可以通过遥控器上的方向舵和副翼通道开关进行调整,摇杆向左或者向右推,模式将会相应改变,调整完毕后,输入“EXIT”后,系统将保存参数并推出。
如果在调整后发现部分舵机出现反向工作,这是可以通过遥控器进行调整或者通过主板上的DIP开关进行调整,建议通过遥控器进行修正。
日志模式,此模式下可以调取板载的16M内存中所保存的飞行日志,常用的命令有“erase”-删除日志。
五、测试模式
在命令框中输入“test”,即可进入到测试模式,输入“help”可以看到测试模式下所有的选项。
可进行测试的项目有:
1、“radio”——显示当前接收机每个通道的输入参数
2、“gps”——显示从GPS模块接收到的数据,如未锁定卫星,则显示0
3、“IMU”——显示惯性制导元件所输出的X/Y/Z三轴的数据
4、“gyro”——显示板载陀螺仪和加速度计输出的数据
5、“battery”——显示当前电压,但前提是电池的充电线需接入系统
6、“relay”——测试板载继电器工作是否正常
7、“waypoints”——显示设定的航点
8、“airspeed”——显示所连接的空速计输出的数据(需要外接空速计)
9、“airpressure”——显示板载气压计输出的数据
10、“compass”——显示电子罗盘输出地数据(需要外接电子罗盘)
11、“xbee”——显示数传电台之间的输入输出数据
12、“eedump”——显示板载EEPROM所存储的数据
如果硬件和软件完全正常的话,进入上面的测试菜单,可以看到相应的数据,如果出现异常,则说明某些硬件出现故障。
1、RC输入使接收机和系统相连,加电。打开遥控器,在命令框中输入“radio”,如正常,即可看到如下的显示:
2、GPS输入放置GPS模块于空旷位置,使其能搜到卫星并锁定,在命令框中输入“gps”,如正常,即可看到如下的显示:
3、IMU,在命令框中输入“IMU”,如正常,即可看到如下的三轴数据显示:
4、gyro,在命令框中输入“gryo”,如正常,即可看到如下的陀螺仪和惯性加速元件的数据显示:
5、battery,在命令框中输入“battery”,如正常,即可看到如下的电压数据显示:
系统支持3S和4S锂电池接入,如果需要检测电压,需要在主板继电器下的电阻空位焊上4个3.9K的中功率电阻。
6、relay,在命令框中输入“relay”,你将会听到板载的继电器切换时发出的“咔咔声”,切换每5秒动作一次。
7、waypoints,在命令框中输入“waypoints”,如正常,即可看到如下的航点数据显示:
共计可以输入256个航点,显示的数据中有,P2 10000代表100米,P3、P4代表经纬度。
8、airspeed,在命令框中输入“airspeed”,如硬件连接正常正常,即可看到空速计所输出的数据:
9、airpressure,在命令框中输入“airpressure”,如硬件连接正常正常,即可看到气压高度计所输出的数据:
9、compass,在命令框中输入“compass”,如硬件连接正常正常,即可看到电子罗盘所输出的数据:
10、xbee,在命令框中输入“xbee”,如硬件连接正常正常,即可看到数传电台所输出输入的数据:
这是你可以用电脑的串口查看工具,看到数据流,数传电台的默认空中速率为57600bps,你也可以修改为其他速率,比如38400bps,只需修改APM_Config.h 文件中的#定义SERIAL3_BAUD 38400既可。
11、eedump,在命令框中输入“eedump”,你可以看到当前板载存储器的使用情况:
六、高级模式
大多数使用者可以通过拨动DIP开关进入基本测试模式,但是通过修改APM_Config.h文件中的命令行可以实现更多的功能。
复制https://www.doczj.com/doc/018452987.html,/p/ardupilot-mega/wiki/AdvancedConfig 页面中的代码粘贴到APM_Config.h可以实现更高级的功能。
未完待续
Kan8/火星刺客 2011.2.14
ArduPilot飞控交流群QQ:57343222
一、流式细胞仪技术参数 1 工作条件: 1.1 电源要求: 220V (±10%)、50-60HZ 1.2 环境温度:16-30℃ 1.3 湿度:20-80% 2 用途:免疫分析、淋巴细胞亚群分析;细胞周期分析、凋亡分析;感染分析、肿瘤细胞分析;多重细胞因子分析等。 3 技术规格和参数 3.1 激发系统: 3.1.1 激发光源:405nm紫色固态激光器、488nm蓝色固态激光器和640nm红色固态激光器,固定光路,空间立体激发。 3.1.2 激光塑形:自动的多棱镜塑形系统,光斑大小:9x65um椭圆形光斑 3.1.3 流动室规格:180x430μm 3.2 荧光收集和检测 3.2.1 光胶耦合物镜,数值孔径1.2,大面积收集发射荧光。 3.2.2 每一激发激光对应一个独立检测单元,光胶耦合物镜自动分开汇集每一激光激发的发射荧光进入相对应检测单元,避免光谱交叉。 *3.2.3 配备1个独立八角型全反射检测系统、2个独立三角型全反射检测系统 3.2.4 光学检测系统内部采用全反射检测光路系统,荧光信号到达检测器只经过一个长通滤光片,信号能量损失最小。 3.2.5 检测系统依次优先检测易衰减的长波长信号,保证弱信号灵敏度。 *3.2.6 共计12个信号检测器,包括10个光电倍增和和2个散射光探测器。 3.2.7 荧光通道组合:405nm紫色激光器对应3个检测通道,滤光片包
括450/50nm、 525/50nm、 605/40 nm;488nm蓝色激光器对应4个检测通道滤光片包括530/30nm、 575/25nm、695/40nm、780/60 nm; 640nm 红色激光器对应3个检测通道,检测滤光片包括:670/30nm、712/21nm、780/60 nm。通道之间最低光谱交叉,滤光片带有智能芯片,直接插拔,自动识别。 *3.2.8 荧光检测灵敏: FITC<100MESF,PE<50MESF(提供英文原版参数);CFDA检测结果FITC<5MESF,PE<5MESF(提供检测报告)。 *3.3 样本分析速率:>32,000个细胞/秒(提供英文原版参数)。 3.4 变异系数:全峰宽CV<3% *3.5 采用正压上样系统,非注射泵或蠕动泵。样本残留量<0.2%。 3.6 最小样本量:≤30ul 3.7 检测颗粒大小:0.5-50μm 3.8 数字信号处理:18bit动态范围,符合IEEE 32bit浮点分辨率。3.9 脉冲处理系统:能同时分析脉冲信号峰值、脉冲积分(面积)及脉冲宽度,可区分多倍体细胞、粘连细胞。 3.10 可溶性蛋白分析:具备多重可溶性蛋白分析功能,包括:细胞因子、炎症因子、趋化因子等;可达单管数十重分析,包括:多重定量及动力学分析。 *3.11 液流车:独立液流车,避免振动影响仪器主机光路和液流;自动控制所有压力、鞘液、清洗液等,大体积液体储备保证长时间、稳定工作;鞘液桶20L,废液桶10L,清洗液桶5L,关机液桶5L。开关机自动清洗液路,正常状态鞘液消耗<1.10 L/h,待机状态鞘液消耗<1 mL/h。 3.12 配置淋巴细胞亚群自动分析软件,无需手动设置,实现淋巴细胞亚群分型的全自动化。 3.13 主软件:Windows系统,原版专业化流式数据收集及处理软件, 可按用户需求设置条件进行数据分析和报告。 3.14 临床自动软件:标配临床自动软件,拥有具CFDA认证的4色及6
ArduPilot 自动驾驶仪手册 一、简介 系统构成: 1、一块ArduPilot Mega板(红色) 2、一块ArduPilot Mega IMU板(红色) 3、一套 MediaTek GPS 或者 uBlox GPS模块 4、若干根接收机连接线及配套的插线,如果需要使用系统的自动驾驶和功 能,推荐使用8通道接收机 5、一套Xbee数传电台,一块Xbee数传电台与ArduPilot Mega IMU,另一 块通过适配器与PC相连(提醒:因传送的数据量大,推荐配置空中速率 位57600bps的数传电台,低速率数传电台将会导致严重的数据丢包现象)。 仔细阅读本手册,将有利于调试自动驾驶仪。作为一套开源的自动驾驶仪,我们支持第三方传感器的接入,如空速计、电子罗盘等,这意味着您必须对本系统进行正确的参数设置,才能安全飞行。 二、快速入门指南 (一)电路板的组装 所需材料及工具:MEGA 板和IMU板各一块;板件连接插件若干;带 连线的GPS模块(推荐4HZ);烙铁;焊丝等 1、焊接MEGA机IMU板上的元器件
2、对应安装好两块板子之间的连接插件
3、两块板子相插 4、连接GPS模块之后的样子,注意:GPS模块连接在红色MEGA 板子上,而非蓝色IMU板子上的接口,IMU的6芯接口用于连 接诸如电子罗盘等外接传感器。 (二)如何连接 1、系统连接图
其中,自动驾驶仪控制通道为第八通道,利用三段开关进行模式切换。 2、安装示意图
因IMU板载三轴传感器,系统安装时需充分考虑到减震,尽量使其 在飞机上水平安装,且安装方向应如上图所示。 3、DIP开关的使用 因为接收机和配置文件之间会存在差异,可能会导致舵机出 现反向工作,这时你可以通过拨动DIP开关进行修正,而非 通过复杂的参数修改进行修正。 三、编程 (一)所需工具 1、MINI USB数据线,用于ardupilot与PC的相连。 2、配置软件arduino,下载地址https://www.doczj.com/doc/018452987.html,/en/Main/Software (二)如何通过arduino进行编程 1、通过USB连接arduino与PC,同时根据提示安装FT232RL驱动,并记下 串口号。
BD FACSCalibur流式细胞仪 FACS101 Handbook 本课程介绍「表面抗原流式分析」有关之基础工作原理。如希望进一步了解流式细胞技术应用,请至本公司网站订阅FACSinformation电子报。 如需要本课程手册,欢迎至本公司网站下载。 如需要免疫荧光染色方法,请至本公司网站下载。 一、BD FACSCalibur基本结构 1.1仪器本体: 1. 电源开关:在BD FACSCalibur仪器右侧下方,先启动仪器本体,再打开计算机。 2. 光学系统:BD FACSCalibur 基本配有一支波长488 nm 的氩离子雷射 以BD FACSCalibur 基本型为例 ?FSC Diode 只收488 nm波长散射光 ?SSC PMT 只收488 nm波长散射光 ?FL1 PMT 荧光光谱峰值落在绿色范围(波长515-545 nm) ?FL2 PMT 荧光光谱峰值落在橙红色范围(波长564-606 nm) ?FL3 PMT 荧光光谱峰值落在深红色范围(波长 >650 nm)
3. 仪器面板: 仪器前方面板的右下方有三个流速控制键、及三个功能控制键。 流速控制: LO:样品流速:12 μl /min MED:样品流速:35 μl /min HI: 样品流速:60 μl /min 功能控制: ?RUN:此时上样管加压,使细胞悬液从进样针进入流动室。(正常显示绿色;黄色时表示仪器不正常,请检查是否失压。) ?STANDBY:无样品或暖机时之正常位置,此时鞘液停止流动,雷射功率自动降低。 ?PRIME:去除流动室中的气泡,流动室施以反向压力,将液流从流动室冲入样品管,持续一定时间后,以鞘液回注满流动室。PRIME 结束,仪器 恢复STANDBY状态。 4. 储液箱抽屉: 在主机左下方之储液箱抽屉。可向前拉开,内含鞘流液筒、废液筒、鞘液过滤器Sheath Filter,及空气滤网 Air filter。请注意气路减压阀VENT TOGGLE之位置。
自动驾驶仪系统 2.1自动驾驶仪的功能 自动驾驶仪的基本功能可列举如下: (1)自动保持三轴稳定,具体地说,及自动保持偏航角,俯仰角于某一希望角度,倾斜角保持为零进行直线飞行(平直飞行,爬高,下滑)。 (2)驾驶员可以通过旋钮或其他控制器给定任意航向或俯仰角,使飞机自动改变航向并稳定于该航向,或使飞机上仰或下俯并保持给定俯仰角。 (3)自动保持飞机进行定高飞行。 (4)驾驶员通过控制器操纵飞机自动爬高或俯冲,达到某一预定高度,然后保持这一预定高度。 上述所有基本功能都是指自动驾驶仪与飞机处于正常状态的控制功能。辅助功能如下: (1)一旦自动驾驶仪的舵机处于卡死或无法操作的状态时,应允许驾驶员具有超控的能力。 (2)自动回零功能。在投入自动驾驶仪之前,飞机本身处于平直飞行的配平状态,必须让自动驾驶仪的反馈信息与测量元件的总和信号回零,才能避免投入后形成误动作。 (3)B IT功能。一种机内自检测功能,在自动驾驶仪的部件及系统中,可设置BIT检测信号,借以检查某部件或全系统工作是否
正常。这种检查可在自动驾驶仪投入前进行。 (4)M a数配平功能。飞机在跨声速区,升降舵操纵特性有一个正梯度区,从而操纵特性不稳定,设立Ma数配平系统控制水平安定面,以改善其操纵特性。 2.2自动驾驶仪的分类 自动驾驶仪最常用的分类方法是按控制律来区分。所谓控制律通常是指自动驾驶仪输出的舵偏角与信号的静动态函数关系。按这种分类方法,可分为比例式自动驾驶仪、积分式自动驾驶仪和均衡式反馈自动驾驶仪(比例加积分控制律的自动驾驶仪)三种。 其次也可以按自动驾驶仪三种主要部件(传感器,计算与放大元件以及舵机)的能源来分,这时可以分为气动式(早期应用过),气动液压式,电动式以及电动液压式。 如果按处理信号,实现控制律是采用连续信号,还是中间经过数字化再转换成为模拟信号来区分,可以分为模拟式与数字式两种。 2.2.1比例式自动驾驶仪 以俯仰通道为例,升降舵偏角增量与飞机俯仰角偏差成比例的自动控制器称为比例式自动驾驶仪。 δ?e=Lθ(θ? - θ?g)(产生控制力矩)
i l e n t E B网络分析仪使 用方法 公司内部编号:(GOOD-TMMT-MMUT-UUPTY-UUYY-DTTI-
前面板:部件的名称和功能 按键 工作通道/迹线区 用于选择工作通道和迹线的一组按键。 输入区 E5061B 的前面板上提供了用于输入数字数据的一组按键。
仪器状态区 与宏程序功能、存储和调用功能、控制/管理功能以及预设 E5061B(将其返回到预设状态)相关的一组按键。
标记/分析区 用于通过使用标记等来分析测量结果的一组按键。
最小值、峰值和带有目标值的点)。还可以查找带宽参数(最多六个)并显示它们。 Marker Fctn 在中显示“Marker Fctn”菜单。通过操纵“Marker Function”菜单,不仅可以指定通道中的标记扫描范围和标记耦合,还可以显示迹线上的统计数据。 Analysis在中显示“Analysis”菜单。通过操纵“Analysis”菜单,可以使用故障定位、SRL 和每个极限测试的分析功能。 浏览区(前面板上没有标签) 浏览区中的按键和旋钮用于在功能键菜单、表格(极限表、分段表等)或对话框中的选定(高亮显示的)区域中进行浏览,以及通过增加或减少来更改数据输入区域中的数值。当使用屏幕上显示的浏览区按键,从两个或多个对象(功能键菜单、数据输入区域等)中选择一个要操纵对象的时,首先按中的 Foc(聚焦)键,以选择要操纵的对象(将焦点置于该对象上),然后操纵浏览区按键(旋钮),在选定(高亮显示)的对象之间移动或更改数值。 下面的描述说明了当焦点在功能键菜单上时和当焦点在数据输入区域中时浏览区按键的作用。有关操纵表和对话框的更多信息,请参考所有这些功能的操纵步骤。 按键名称说明 旋钮 (顺时针旋转 或逆时针转 上下移动对功能键的选择(高亮显示)。
Instrumentation and Equipments 仪器与设备, 2018, 6(3), 95-98 Published Online September 2018 in Hans. https://www.doczj.com/doc/018452987.html,/journal/iae https://https://www.doczj.com/doc/018452987.html,/10.12677/iae.2018.63015 BD Flow Cytometer Principle and Typical Malfunction Analysis Xiusheng Qiu*, Caihui Zeng, Liting Zhang The Third Affiliated Hospital of Sun Yat-sen University, Guangzhou Guangdong Received: Aug. 23rd, 2018; accepted: Sep. 11th, 2018; published: Sep. 18th, 2018 Abstract Flow cytometry is a device for automatic cell analysis and cell separation. In this paper, the prin-ciple of BD flow cytometry is introduced, and the common faults of flow cytometry are described. After analysis, the troubleshooting process is described in detail. Flow cytometry instrument equipment failure can be divided into liquid road faults, hardware failure, software failure, and all three cases. Only by accumulating in use can we fast judge the fault, and quickly solve the problem. Keywords Flow Cytometer, Principle, Malfunction Analysis BD流式细胞仪原理与典型故障分析 丘秀生*,曾彩辉,张丽婷 中山大学附属第三医院,广东广州 收稿日期:2018年8月23日;录用日期:2018年9月11日;发布日期:2018年9月18日 摘要 流式细胞仪是对细胞进行自动分析和分选的装置,已经渐渐成为生物科学重要的分析仪器。本文介绍了BD流式细胞仪的原理,并对流式细胞仪常见的典型故障做了阐述,进行分析后,并对故障的排除过程进行了详细的阐述。流式细胞仪维中设备故障可分为液路故障、硬件故障、软件故障和三者兼具的情况,只有在使用过程中不断积累,才能快速判断故障,并迅速的排除。 *通讯作者。
流式细胞仪上机操作培训手册 一、样本处理 以PBMC表面抗原的流式检测步骤为例 1)取样。取新鲜提取或冻存后复苏的PBMC; 2)编号。根据实验设计,标记好流式管,如每份PBMC设两管: a)1号管:相应同型对照; b)2号管:CD3,CD4,CD8,CD56四标管; 3)加样。用移液器取100ul细胞/管(约1×106个细胞/管),分别加到已经标记 好的流式管底部; 4)洗涤。加入1ml PBS/管,涡旋1600rpm/min,离心6min; 5)染色。弃上清,加入100 μl PBS/管涡旋混匀细胞,并根据实验设计,向各流 式管中加入相应的荧光素标记抗体,混匀,室温避光孵育30min(操作尽量保持在避光条件下进行。) 6)洗涤。加入1ml PBS/管,涡旋1600rpm/min,离心6min; 7)重悬。弃上清,加入0.5ml PBS/管,混匀,上机检测(可选择BD FACSCanto II或BD Accuri C6)。 (注:若不能及时上机,应加入4%多聚甲醛固定,并于4℃避光保存。)8)试验结果分析。(注:实验过程中如果进行多色标记,需要调节荧光补偿)。参考值:
二、上机检测 BD FACSCanto II简要操作流程启动流式细胞仪 1 打开流式细胞仪电源 2 启动计算机,打开软件登录 3 确保软件连接到流式细胞仪 必要时,点击Cytometer > connect 检查液体水平 1 启动流式细胞仪后,检查液体水平 低液面水平或者废液桶满都用红色指示。
2 如果液流车未自动开启,选择Cytometer > Fluidics Startup。 3 当液流启动完成后,点击OK关闭对话框。 检查气泡 1 在检查完液体水平后,开启流动室门,检查流动室中是否有气泡。
前面板:部件的名称和功能
按键 工作通道/迹线区 用于选择工作通道和迹线的一组按键。 输入区 E5061B 的前面板上提供了用于输入数字数据的一组按键。
仪器状态区 与宏程序功能、存储和调用功能、控制/管理功能以及预设 E5061B(将其返回到预设状态)相关的一组按键。
标记/分析区 用于通过使用标记等来分析测量结果的一组按键。 浏览区(前面板上没有标签) 浏览区中的按键和旋钮用于在功能键菜单、表格(极限表、分段表等)或对话框中的选定(高亮显示的)区域中进行浏览,以及通过增加或减少来更改数据输入区域中的数值。当使用屏幕上显示的浏览区按键,从两个或多个对象(功能键菜单、数据输入区域等)中选择一个要操纵对象的时,首先按输入区中的 Foc(聚焦)键,以选择要操纵的对象(将焦点置于该对象上),然后操纵浏览区按键(旋钮),在选定(高亮显示)的对象之间移动或更改数值。
下面的描述说明了当焦点在功能键菜单上时和当焦点在数据输入区域中时浏览区按键的作用。有关操纵表和对话框的更多信息,请参考所有这些功能的操纵步骤。 ?焦点位于功能键菜单上时(已选择功能键菜单) 旋钮 (顺时针旋转或 逆时针转动) 上下移动对功能键的选择(高亮显示)。 上/下 箭头键 上下移动对功能键的选择(高亮显示)。 右箭头键 显示上一层功能键菜单。 左箭头键 显示下一层功能键菜单。 Enter或 旋钮(按下) 执行选定功能键的功能。 ?焦点位于数据输入区域中时(已选择数据输入区域) 旋钮 (顺时针旋 转或逆时针 转动) 以小步长增加或减少数据输入区域中的数值。 上/ 下箭头键 以大步长增加或减少数据输入区域中的数值。 左/右箭在数据输入区域来回横向移动光标 键一起使用,以一次更改一个字符的方式更改数据。
FACSCalibur流式细胞仪操作规程 一、编号:YQ0606 二、标题:FACSCalibur流式细胞仪操作规程 三、关键词:流式细胞仪操作规程 四、目的:保证流式细胞仪的安全及有效操作 五、背景知识:流式细胞术(Flow CytoMeter,FCM)是一种在功能水平上对单细胞或其他生物粒子进行定量分析和分选的检测手段,它可高速分析上万个细胞,并能同时从一个细胞中测得多个参数,与传统荧光镜检查相比,具有速度快、精度高、准确性好等优点,成为当代最先进的细胞定量分析技术。 六、原理 待测细胞染色后制成单细胞悬液,用一定压力将待测样品压入流动室,不含细胞的磷酸缓冲液在高压下从鞘液管喷出,鞘液管入口方向与待测样品流成一定角度,这样鞘液就能够包绕着样品高速流动,组成一个圆形的流束,待测细胞在鞘液的包被下单行排列,依次通过检测区域。 流式细胞仪通常以激光作为发光源。经过聚焦整形后的光束,垂直照射在样品流上,被荧光染色的细胞在激光束的照射下,产生散射光和激发荧光。这两种信号同时被前向光电二极管和90°方向的光电倍增管接收。光散射信号在前向小角度进行检测,这种信号基本上反映了细胞体积的大小;荧光信号的接受方向与激光束垂直,经过一系列双色性反射镜和带通滤光片的分离,形成多个不同波长的荧光信号。 这些荧光信号的强度代表了所测细胞膜表面抗原的强度或其核内物质的浓度,经光电倍增管接收后可转换为电信号,再通过A/D转换器,将连续的电信号转换为可被计算机识别的数字信号。计算机把所测量到的各种信号进行计算机处理,将分析结果显示在计算机屏幕上,液可以打印出来,还可以数据文件的形式存储在硬盘上以备日后的查询或进一步分析。 检测数据的显示视测量参数的不同由多种形式可供选择。单参数数据以直方图的形式表达,其X轴为测量强度,Y轴为细胞数目。一般来说,流式细胞仪坐标轴的分辨率有512或1024通道数,这视其模数转换器的分辨率而定。对于双
B D F A C S C a l i b u r流式细胞仪 FACS101Handbook 本课程介绍「表面抗原流式分析」有关之基础工作原理。如希望进一步了解流式细胞技术应用,请至本公司网站订阅FACSinformation电子报。 如需要本课程手册,欢迎至本公司网站下载。 如需要免疫荧光染色方法,请至本公司网站下载。 一、BDFACSCalibur基本结构 1.1仪器本体: 1.电源开关:在BDFACSCalibur仪器右侧下方,先启动仪器本体,再打开计算机。 2.光学系统:BDFACSCalibur基本配有一支波长488nm的氩离子雷射 以BDFACSCalibur基本型为例 ?FSCDiode只收488nm波长散射光 ?SSCPMT只收488nm波长散射光 ?FL1PMT荧光光谱峰值落在绿色范围(波长515-545nm) ?FL2PMT荧光光谱峰值落在橙红色范围(波长564-606nm) ?FL3PMT荧光光谱峰值落在深红色范围(波长>650nm) 3.仪器面板: 仪器前方面板的右下方有三个流速控制键、及三个功能控制键。 流速控制: LO:样品流速:12?l/min MED:样品流速:35?l/min HI:样品流速:60?l/min
功能控制: ?RUN:此时上样管加压,使细胞悬液从进样针进入流动室。(正常显示绿色;黄色时表示仪器不正常,请检查是否失压。) ?STANDBY:无样品或暖机时之正常位置,此时鞘液停止流动,雷射功率自动降低。 ?PRIME:去除流动室中的气泡,流动室施以反向压力,将液流从流动室冲入样品管,持续一定时间后,以鞘液回注满流动室。PRIME结束,仪器恢 复STANDBY状态。 4.储液箱抽屉: 在主机左下方之储液箱抽屉。可向前拉开,内含鞘流液筒、废液筒、鞘液过滤器SheathFilter,及空气滤网Airfilter。请注意气路减压阀VENTTOGGLE之位置。 ?鞘液筒:位于抽屉左侧,容积4升。装八分满鞘液筒,仪器可以运行大约3小时。筒上装有液面感应器,鞘液用完时,仪器软件上会有显示。鞘液筒盖 上有金属环扣,保证鞘液筒密闭。 ?废液筒:位于抽屉右侧,容积4升。筒上装有液面感应器,废液盛满时,仪器软件上会有显示。注意废液可能有潜在的生物传染性。 ?鞘液过滤器:0.22?m过滤器,去除鞘液中的杂质,保证进入流动室的鞘液是干净的。 ?气路减压阀:沿箭头方向移动阀门开关,鞘液筒减压,气压恢复正常。在鞘液筒添加鞘液时,需要减压。 ?空气过滤网:用于过滤冷却雷射的空气。 5.上样品区: 上样品区是样本管的上样位置。它包括三个部分,一个是进样针 SampleInjectionTube,将样本输入流动室,还有就是支撑架 TubeSupportArm、和液滴存留系统DropletContainmentSystem。 ?进样针:是一根不锈钢管,将细胞从样本针中吸入流动室。进样管外有一套管,是液滴保留系统的一部分。 ?支撑架:用于支撑样本管、并负责启动液滴存留系统。支撑架有三个位置:位于样本管之下的中位,样本管左侧或右侧。 液滴存留系统:系统由支撑架、真空帮浦和外套管组 成。当支撑架位于左侧或右侧位置时,真空帮浦就会启 动,将液体从外管吸入废液筒内。上样时,须注意将支 撑架位于中位,以避免过多样品被抽吸到废液筒内(当 支撑架位于中位,真空帮浦停止工作)。更换样品时, 让仪器保持RUN的模式,使得进样针可以反冲;切换到 STANDBY模式前,确保液路已冲洗彻底以免碎片沈积到 流动室中。
第一部分性控技术和性控冻精的概况 一、性控技术的概念和在畜牧业生产中的重要意义 性别控制:通过人为的干预使雌性动物繁殖出人们所期望的性别后代的一种繁殖新技术。奶牛XY精子分离技术是指将公牛的精液根据精子自身X染色体和Y染色体的DNA含量不同,把这两种类型的精子通过物理方法、计算机技术等进行有效的分离,将X精子分装冷冻后,用于牛的人工授精,使母牛怀孕的技术,母牛率可以达到90%以上;根据精子自身X、Y染色体中DNA含量的不同而有效分离的冻精就叫性控冻精。从经济效益来讲,该技术的应用将直接为奶农带来更多的获得良种母牛机会,增加了奶农的收入。 其重要意义在于: 1、产母犊效益提高良种母犊出生数量,使良种奶牛的繁育数量呈几何速度增长,加速牛群改良和更新,迅速达到良种化规模养殖,增加规模效益。 2、充分利用现有优质种公牛和高产奶牛的遗传潜力母牛一生能产6~7胎,平均可以留下3头母牛,采用性控冻精使高产奶牛一生可以产6~7头优质母牛。 3、提高生产性能加速低产奶牛的改良步伐,迅速扩大良种奶牛群,产奶性能得到快速提升,产奶效益不断增加。 以上三点都说明在使用性控冻精后可以显著的提高奶牛养殖的经济效益,同时与胚胎工程技术的结合可以使奶牛的品种改良一步到位。 二、性控冻精在我国应用的重要性和在国内的应用及效果 由于我国奶牛的品种质量较差,平均单产达不到 3500公斤/头,远低于世界平均单产5500公斤/头的水平,更达不到以色列、美国等奶业发达国家奶牛单产的一半。因此从我国实际情况分析,全国各地对良种牛的需求量非常大。奶牛是单胎动物,自然状态下,一头母牛一年只能繁殖一胎,终生平均也只能提供3头左右的母牛后代。由于奶牛自然繁殖率低,繁殖速度慢,年增长速度仅为15%,使得国内现有高产、良种奶牛扩繁速度受到很大限制;若从国外大批引进良种奶牛不但成本高,而且受到国外牛源和国家检疫的限制;因此,高产纯种奶牛的缺乏成为目前我国奶业快速发展的主要瓶颈。奶牛XY精子分离技术是目前最先进、最经济的良种繁育技术,X精子分离纯度已达到90%以上,分离后受胎率和常规冻精相当;这样意味着如果得到一头良种母牛犊,采用传统的冻精配种,则需要4剂精液,花费二年的时间;而采用性控冻精,只需要2剂,花费一年的时间。XY精子分离技术不论从繁育的成本还是从良种扩繁速度上考虑,都是畜牧业良种繁殖改良技术上的一场革命。 该产品已经在全国22个省市进行了广泛的推广和使用,以可信的质量和受胎率、母牛率在同类产品中最好(下表为部分抽样统计结果)得到了各级政府部门和养殖户(场)的称赞和认可。
流式细胞仪入门 -----导航篇 二OOO年四月
目录 前言 第1章综述 第2章液流系统 第3章散射光信号及荧光信号 3.1 散射光信号 3.2 荧光信号 第4章光电系统 4.1 光平台 4.2 光学滤片 4.3 信号探测器 4.4 阀值 第5章数据分析 5.1 数据采集及显示 5.2 设门 5.3 细胞亚群的数据分析 5.4 流式细胞仪其它应用的数据分析第6章分选 6.1 分选 第7章激光器及光路校正 7.1 激光器的工作原理 7.2 光路校正 第8章答案
序论 学习仪器的最好方法是操作仪器,然而在理解原理的基础上进行仪器操作无疑会起到事半功倍的作用。 本书介绍了流式细胞仪的基本知识,并从不同角度详尽阐述了各种台式机(FACScan TM,FACSort TM,FACSCalibur TM,和BD LSR)与大型机(FACS Vantage TM,FACSVantage TM SE,和FACStar PLUSTM)之间的不同。阅读本书有助于增强读者操作仪器的动手能力和经验。
第一章综述 流式细胞术是一项快速检测分析单个粒子多物理特性的高技术,通常指细胞通过激光束时在液流中的特性,即粒子的大小,密度或是内部结构,以及相对的荧光强度。通过光电系统记录细胞的散射光信号和荧光信号可得知细胞特性。 流式细胞仪主要由三部分组成:流动室和液流系统;光路系统以及电系统。其作用如下: 液流系统:依次传送待测样本中的细胞到激光照射区。 光路系统:细胞由激光激发,通过光学滤片产生光信号,并传送到相应的探测器。 电系统:把光信号转换为电信号。对于有分选装置的仪器,电系统可初始化分选条件。 在流式细胞仪中,细胞被传送到液流中的激光照射区。任何存在于悬液中的直径为0.2-150微米的粒子或细胞都适用于流式分析。在实际工作中,用实体组织进行流式细胞分析往往是不可能的,分析之前必须对其进行分解。被液滴包绕的粒子称为细胞液柱,当粒子经过激光照射区时,通过激光激发产生散射光。含有荧光的粒子就会表现出其荧光特性。散射光和荧光由光路系统(相应的透镜,滤片和探测器)收集。分光器和滤光片引导散射光和荧光至相应的探测器,把光信号转换为电信号。 单个粒子通过其表现出的光散射和荧光属性,通过列表模式(List mode)完成数据采集,并对样本中的细胞亚群进行分析。
流式细胞仪临床应用手册 案场各岗位服务流程 销售大厅服务岗: 1、销售大厅服务岗岗位职责: 1)为来访客户提供全程的休息区域及饮品; 2)保持销售区域台面整洁; 3)及时补足销售大厅物资,如糖果或杂志等; 4)收集客户意见、建议及现场问题点; 2、销售大厅服务岗工作及服务流程 阶段工作及服务流程 班前阶段1)自检仪容仪表以饱满的精神面貌进入工作区域 2)检查使用工具及销售大厅物资情况,异常情况及时登记并报告上级。 班中工作程序服务 流程 行为 规范 迎接 指引 递阅 资料 上饮品 (糕点) 添加茶水工作1)眼神关注客人,当客人距3米距离侯客迎询问客户送客户
注意事项 15度鞠躬微笑问候:“您好!欢迎光临!”2)在客人前方1-2米距离领位,指引请客人向休息区,在客人入座后问客人对座位是否满意:“您好!请问坐这儿可以吗?”得到同意后为客人拉椅入座“好的,请入座!” 3)若客人无置业顾问陪同,可询问:请问您有专属的置业顾问吗?,为客人取阅项目资料,并礼貌的告知请客人稍等,置业顾问会很快过来介绍,同时请置业顾问关注该客人; 4)问候的起始语应为“先生-小姐-女士早上好,这里是XX销售中心,这边请”5)问候时间段为8:30-11:30 早上好11:30-14:30 中午好 14:30-18:00下午好 6)关注客人物品,如物品较多,则主动询问是否需要帮助(如拾到物品须两名人员在场方能打开,提示客人注意贵重物品); 7)在满座位的情况下,须先向客人致
待; 阶段工作及服务流程 班中工作程序工作 要求 注意 事项 饮料(糕点服务) 1)在所有饮料(糕点)服务中必须使用 托盘; 2)所有饮料服务均已“对不起,打扰一 下,请问您需要什么饮品”为起始; 3)服务方向:从客人的右面服务; 4)当客人的饮料杯中只剩三分之一时, 必须询问客人是否需要再添一杯,在二 次服务中特别注意瓶口绝对不可以与 客人使用的杯子接触; 5)在客人再次需要饮料时必须更换杯 子; 下班程 序1)检查使用的工具及销售案场物资情况,异常情况及时记录并报告上级领导; 2)填写物资领用申请表并整理客户意见;3)参加班后总结会; 4)积极配合销售人员的接待工作,如果下班
自动驾驶仪,自动油门,飞行指挥仪 *** Intended For Flight Simulation Use ONLY * 仅供飞行模拟使用* 本文中所有术语的翻译,均以英文原文为准。*** 什么是自动驾驶系统? 自动驾驶系统(自动驾驶仪),是一种通过飞行员按一些按钮和旋转一些旋钮,或者由导航设备接收地面导航信号,来自动控制飞行器完成三轴动作的装置。不同型号的飞机所装备的自动驾驶仪可能会有一些小的差别,但是大体相似。 自动驾驶系统能做些什么? 在FS2004里,Cessna 和Beechcraft Baron 58 装备的自动驾驶仪具有以下功能: ?保持机翼水平,不发生滚转。 ?保持飞机当前的仰俯角。 ?保持选定的飞行方向。 ?保持选定的飞行高度。 ?保持选定的上升率或下降率。 ?跟踪一个VOR电波射线(Radial)。 ?跟踪一个定位信标(Localizer)或反向航路定位信标(Localizer Back Course)。 ?跟踪仪器降落系统(Instrument Landing System)的定位信标和下滑道指示信标(Glide Slope)。 ?跟踪一个GPS航路。 在FS2004中,Beechcarft King Air 350, Bombardier Learjet 45, 和所有的Boeing 喷气机,都装备有自动飞行控制系统,包括自动驾驶仪,自动油门(自动节流阀门)和飞行指挥仪。这套系增加了以下功能: ?保持一个选定的飞行速度(空速或地速)。 ?消除有害的偏航。 ?帮助飞行员正确的手动控制飞机。 在FS2004中,有些机型或面板上,提供更多的自动驾驶仪操作功能: ?飞行管理计算机(Flight Management Computers) ?垂直方向导航(Vertical Navigation) ?横向导航(Lateral Navigation) ?飞行水平改变(Flight Level Change) ?机轮控制(Control Wheel Steering) ?自动降落(Autoland)
目录
第一部分流式细胞术简介 1流式细胞术定义 流式细胞仪是集激光技术、电子物理技术、光电测量技术、计算机技术以及细胞荧光化学技术、单克隆抗体技术为一体的新型高科技仪器,为生物医学与临床检验学发展提供了最强有力的工具。 流式细胞分析技术(flowcytometry,FCM)又称流式细胞术,是20世纪70年代发展起来的一种快速、准确、客观的检测技术,它能够同时检测快速直线流动状态中的单个细胞或微球的多项物理及生物学特性--在极短的时间内高速分析上万个甚至是几十万个细胞,并能同时从一个细胞中测得多个参数,对其加以定性定量分析,还可以对特定群体加以分选。目前,流式细胞术已经广泛用于临床应用与基础研究,在免疫学、遗传学、血液学、肿瘤学、细胞生物学、细胞遗传学、生物化学等医学与生命科学所有领域内发挥着重要的作用。 2流式细胞仪工作原理 制备成单细胞悬液的标本或单个微粒在上样前进行荧光染色。流式细胞仪检测到上样管后,产生一定的气体压力将待测样本压入流动池。同时鞘液(不含细胞或微粒的缓冲液)在仪器产生的高压作用下从鞘液管喷出,鞘液管入口方向与样本流形成一定的角度,形成一个圆形的鞘液流,包围着细胞或微粒高速流动,使待测细胞在鞘液的包裹下单行排列,逐个地通过流式细胞仪的激光聚焦区(流动池),从而被检测到,并发出散射光及荧光等多种光学信号。光学信号通过光电信号转换器及电子信号处理系统采集及分析后,最后以图形的形式将数据结果显示在电脑屏幕上。 3流式细胞仪的主要结构 光学系统,液流系统,信号处理及放大系统,计算机系统。
4流式细胞仪检测信号 散射光信号:FSSS 荧光信号:FL1FL2FL3FL4… 5流式结果数据分析 6流式细胞仪检测样品 可用于流式细胞仪检测的样本种类多样,包括各种细胞(如外周血、骨髓、细针穿刺、灌洗液、实体组织、悬浮或贴壁培养的细胞),微生物,人工合成微球等;血清、血浆、培养上清、细胞裂解液等。 如果检测样本为实体组织时,我们可以用物理化学(天然,机械研磨/消化)等方法将其制备成单细胞悬液5×105-1×107cells/ml ,并在上机前用300目筛网过滤。 7流式细胞仪检测范围 细胞结构 细胞功能 单参数直方图分析 双参数点图分析 双参数点图分析 双参数等高图分析 双参数密度图分析 三维图分析
Attune NxT流式细胞仪标准操作规程 一、启动Attune NxT流式细胞仪 1、依次打开电脑主机电源、显示器及仪器电源。电脑用户名为INSTR-ADMIN, 密码为INSTR-ADMIN(全部大写)。 2、双击Attune软件图标,用户名为admin,密码为password1(全部小写)。 3、检查仪器内四个液体容器,清空“waste”桶中的废液,确认“Focusing fluid”、 “Wash solution”和“Shutdown solution”三个桶中的液体量是否满足实验要求(液面较高)。 4、点击startup,等待机器启动,整个过程大约需要3分钟。仪器指示灯显示为 绿色,软件左下角出现绿色对勾即为启动完成。 5、点击performance test,在2mL鞘液中滴入3滴performance tracking beads, 混匀后上机,点击Run Performance test。Performance test每天运行1次。这个过程大约耗时3分钟。 二、检测样品 1、点击new experiment新建一个实验,选择tube或plate实验,输入实验名称, 采用默认的Workspace和仪器设置参数,输入Tube Groups和Tube Samples 的数量,点击OK。 2、双击软件右侧Experiment下的Compensation,在弹出的对话框中选择相应的 荧光通道,点击OK。 3、双击UC后上样,点击Run,并调节电压,电压调好后点击Record,依次将 每个单染色的样本上样,并点击Record记录其荧光信号。 4、荧光补偿调好之后双击sample,上样后点击Run即可得到样本的荧光信号。 根据需要建立散点图并建门。 三、关闭Attune NxT流式细胞仪 1、确认”wash solution”和”shutdown solution”桶中液面高度至少在桶高的一半以 上,清空“waste”桶。 2、点击shutdown,选择Quick、Standard或Full,样品管内加入3ml 10% bleach 液,点击next启动关机程序,此时请勿关闭软件或者终止shutdown过程,关
无人机自动驾驶仪 1.自动驾驶仪(autopilot): 按一定技术要求自动控制飞行器的装置。在有人驾驶飞机上使用自动驾驶仪是为了减轻驾驶员的负担,使飞机自动地按一定姿态、航向、高度和马赫数飞行。飞机受暂时干扰后,自动驾驶仪能使它恢复原有的稳定飞行状态,因此,初期的自动驾驶仪称为自动稳定器。自动驾驶仪与飞机上其他系统交联还可实现对飞机的控制。在导弹上,自动驾驶仪起稳定导弹姿态的作用,故称导弹姿态控制系统。它与导弹上的或地面的导引装置交联组成导弹制导和控制系统,实现稳定和控制的功能。 1.1发展概况 1914年美国人E.斯派雷制成电动陀螺稳定装置,这是自动驾驶仪的雏型。30年代,为了减轻驾驶员长时间飞行的疲劳,开始使用三轴稳定的自动驾驶仪。它的主要功用是使飞机保持平直飞行。50年代,通过在自动驾驶仪中引入角速率信号的方法制成阻尼器或增稳系
统,改善了飞机的稳定性。50年代以来自动驾驶仪发展成为飞行自动控制系统。50年代后期,又出现自适应自动驾驶仪,它能随飞行器特性的变化而改变自身的结构和参数。60~70年代,数字式自动驾驶仪应运而生,它在“阿波罗”号载人飞船登月舱的登月过程中得到应用。 1.2原理和组成 自动驾驶仪是模仿驾驶员的动作驾驶飞机的。它由敏感元件、计算机和伺服机构组成。当某种干扰使飞机偏离原有姿态时,敏感元件(例如陀螺仪)检测出姿态的变化;计算机算出需要的修正舵偏量;伺服机构(或称舵机)将舵面操纵到所需位置。自动驾驶仪与飞机组成反馈回路,保证飞机稳定飞行。 1.3分类和特点 自动驾驶仪可按能源形式、使用对象、调节规律等分类。 ①按能源形式:分为气压式、液压式、电气式或者是这几种形式的组合。现代超音速飞机多安装电气(或电子)-液压式自动驾驶仪。气压式伺服机构主要用于导弹。 ②按使用对象:分为飞机自动驾驶仪和导弹自动驾驶仪。飞机自动驾驶仪多具有检测飞机姿态角的敏感元件,能稳定飞机的姿态角。为了提高这种自动驾驶仪的稳定效果,可配合使用速率陀螺仪。战术导弹只需要稳定角速度,其姿态角根据目标的运动而改变,因此,在自动驾驶仪中不设检测角位置的敏感元件。巡航导弹、战略导弹和运载火箭需要稳定姿态角,在这些飞行器的自动驾驶仪中仍有检测姿态角的敏感元件。 ③按调节规律:自动驾驶仪的调节规律(即数学模型)表示伺服机构的输出量与被调参量之间的函数关系。飞机自动驾驶仪依调节规律的不同分为比例式自动驾驶仪和积分式自动驾驶仪。比例式自动驾驶仪是以伺服机构输出的位置偏移量(如舵偏角)与被调参量(如姿态角)的偏差成比例的原理工作的。它的结构简单,应用很广,但在干扰作用下会产生静态误差。积分式自动驾驶仪是以伺服机构输出的位置偏移量与被调参量偏差的积分成比例的原理工作的,它没有静态误差,但系统的稳定性差,结构复杂,应用受到一定限制。 导弹自动驾驶仪按被调参量的性质可分为位置式自动驾驶仪、定向式自动驾驶仪和加速度式自动驾驶仪。位置式自动驾驶仪的被调参量是飞行器的角位置(即姿态角),伺服机构的输出量与姿态角的偏差成比例。定向式自动驾驶仪的被调参量是飞行器的姿态角速度,伺服机构的输出量与姿态角速度的偏差成比例。加速度式自动驾驶仪的被调参量是飞行器的法向加速度,伺服机构的输出量与法向加速度的偏差成比例。 现代自动驾驶仪的趋势是向数字化和智能化方向发展。80年代以前,战术导弹由于工
8712ET简介 8712E是Agilent公司生产的系列经济型射频网络分析仪,其中ET型是传输/反射分析仪。 1.18712ET基本原理 8712ET是在一台射频网络分析仪的基础上增加了若干硬件、软件构成。图1是射频网络分析仪的原理方框图,它由扫频信号发生器(通常内置)、用于分离前向和后向测试信号的测试部分、一个多波段相位相干高灵敏度的接收器、信号处理和显示等部分组成。 图1原理方框图 在进行测量时,仪器发出扫频信号,信号通过输出口送到待测设备,信号通过设备后送回网络分析仪。由于待测设备接口的输入阻抗与网络分析仪输出阻抗不可能理想匹配,必然会反射一部分信号。网络分析仪对输出和输入信号进行比较可得出待测设备的传输指标,如增益、插入损失、分配损失等;对输出和反射信号进行比较可得出待测设备的反射指标,如反射损耗等。 1.28712ET主要参数和特点 8712ET的频率范围是300kHz~1.3GHz,频率分辨率是1Hz,频率精度<5×10-6;不配置衰减器输出功率范围为0~+16dBm,配置衰减器后可达-60~+15dBm;系统阻抗有50Ω和75Ω两种,在CATV系统中使用阻抗为75Ω的;既可进行窄带检测,又可进行宽带检测,100dB的动态范围,扫描速度快(50ms完成一次扫描);具有各种接口,通过标准LAN(局域网)接口数据能直接通过网络共享,用PC应用软件分析、处理或发送到联网打印机上。 1.38712ET仪器面板 8712ET的面板左边是显示屏,其用于显示测量图形和数值。屏幕右边有8个软键,分别对应屏幕右边排列的菜单。右上是软盘驱动器,它下面左下框的数字键、旋钮、上下键等用于数字输入和修改。软盘驱动器右下框的4个按键是系统键,用于存储、调用系统配置或测量数据等操作。再下面的3个框分别是测量曲线选择部分(对曲线1和2进行选择)、信号源设置部分(包括频率特性、扫频特性、输出功率和菜单,用于对选择信号源各种参数进行设置)、配置部分(包括刻度键、显示键、校正键、光标键、格式键和平均键,用于选择各种配置进行设置)。右下是两个N型接头,左边的是输出接口,右边的是输入接口。 28712ET的基本操作 2.1测量前的工作 (1)仪器的各种软、硬件是在购买时确定的,需要根据有线电视系统测量的特点正确配置。如系统阻抗必须是75Ω,输出功率范围、动态范围等都要满足系统要求。 (2)设备加电前注意电源输入选择是否正确,特别是第一次开机时。和许多进口仪器相同,8712ET的电源输入可以是交流110V或220V,使用前必须确保输入选择拨到220V位置,否则会烧毁仪器电源模块。 (3)仪器校正8712ET在第一次使用、经过一段时间使用或更换了测试线缆后,需要进行校正,其步骤为:开机预热30min,按下面板上校正键(CAL),按软键选择屏幕上选项进入自动校正,按照屏幕上的提示,依次将开路接头、短路接头接到输出口,再按提示将输出口和输入口直通,依次操作并确认后校正就完成了。注意在校正时最好使用测量时使用的电缆,否则在后面测量的结果中将包括与原用电缆不同的测试电缆的相关因素,造成测试结果的误差。