
文章编号:100621630(2001)0420002205
星载高分辨、多模式SAR 的建模仿真和总体设计
谢亚楠
收稿日期:2000209212;修回日期:2001201221 基金项目:得到S 286322基金的资助(20.5.2.2)
作者简介:谢亚楠(1962-),男,工学博士,研究领域:雷达总体设计。
(上海航天技术研究院804所,上海 200082)
摘 要:阐述了星载合成孔径雷达(SAR )的常用工作模式,即聚束式、条带式、扫描式和干涉式SAR 的概念、设计考虑和常用设计公式。通过建立模型,对高空间分辨率、多工作模式SAR 的系统集成和总体设计进行了计算机仿真,用该套软件模拟了六套在轨运行的星载SAR 系统参数和分系统指标,仿真结果与公布数据非常吻合。
关键词:星载合成孔径雷达;计算机仿真;多模雷达;总体设计中图分类号:TN958.7 文献标识码:A
The Simulation and Design of High R esolution and Multimode Spaceborne SAR
XIE Ya 2nan
(No.804Institute of SAST ,Shanghai 200082,China )
Abstract :This paper describes the concepts ,considerations and formulas in designing spotlight synthetic aperture radar (SAR ),stripmap SAR ,ScanSAR and InSAR.With the formed models ,the system integration and complex design of high spatial resolution and multimode SAR are simulated by computer.The simulated results of six SAR satellites in orbit tally with published system parameters.
K eyw ords :Synthetic aperture radar ;Computer simulation ;Multimode radar ;System design
0 引言
1978年世界第一颗星载合成孔径雷达———Seasat 发射以来,各种星载SAR 陆续发射升空。
其技术发展的特点是:
a.提高空间分辨率 如美国的Lacrosse 23和SAR 2Lupe 的地面分辨率已达0.3m ,而德国的TerraSAR 和意大利的COSMO2000[1]的地面分辨率也将达到1m 。聚束照射式SAR 已经从理论探讨发展到成熟、实用阶段。
b.集成多种工作模式 如加拿大的
Radarsat 21、Radarsat 22和美国的Discover 22,集聚
束式、条带式、扫描式和干涉式SAR 于一体,解决了平时和战时以及不同用户的各种需求,从而最大限度地发挥了投资效益。
c.研制轻小型SAR 和星座 受技术发展和市场需求牵引,用轻小型SAR 组网来降低成本、提高时间分辨率。
SAR 的新技术发展方兴未艾,有关的文献报
道很多。本文在总结相关文献提供的高分辨、多模式SAR 的物理模型的基础上,建立了较严格、全面的数学模型和数值模型,率先导出了ScanSAR 的严格设计公式,编制了完整的仿真软
件,并把仿真结果与已公布的六套在轨运行的SAR 系统参数相比较,结果非常吻合。
1 高分辨SAR的设计考虑
1.1 工作频率的选择
频率是微波遥感的一个重要参数。根据瑞利准则,对于给定的极化、入射角和相同的地物粗糙度,频率越高,回波强度就越强,即地面后面散射系数σ°随频率增加而加大。对于表面粗糙度较小的海洋和植被观测,选择较高工作频率更为有利。
星载SAR的电磁波信号穿过电离层和对流层时要产生极化旋转、相位失真和损耗。对常用的L、S、C、X微波波段,虽然大气衰减随着频率增加而加大,但都在0.03dB/km以下。只是在X 波段以上时,大气衰减显著增大[2]。
电磁波具有一定的穿透地表和植被的能力。通常,频率越低,穿透深度越深。如L波段的雷达信号可穿透6m干燥沙层。穿透深度还取决于地表的物理特性(介电常数、导磁率、导电率),物质的介电常数越大,它对电磁波的反射率就越高,电磁波的穿透能力就越差。
从技术实现的难易程度来看,频率越高,技术难度越大,研制经费就越高。一般说来,随着频率增加,馈线损耗增大,天线效率下降。例如美国SIR2C/X2SAR成像雷达,天线效率在L波段为57%,在C波段为55%,而在X波段仅为45%。频率越高,大型相控阵天线和展开抛物面天线实现的难度就越大。仅就加工和展开精度而言,对于C波段的ERS21,天线平面度为3mm,而对于L波段的J ERS21,天线平面度为9mm。但是,在运载火箭有效载荷舱的空间限制下,星载SAR的天线尺寸不能很大。这时,频率越高,天线口径的电长度就越大,天线波束宽度就越窄,这对提高天线增益和空间分辨率是有利的。
1.2 决定空间分辨率的因素
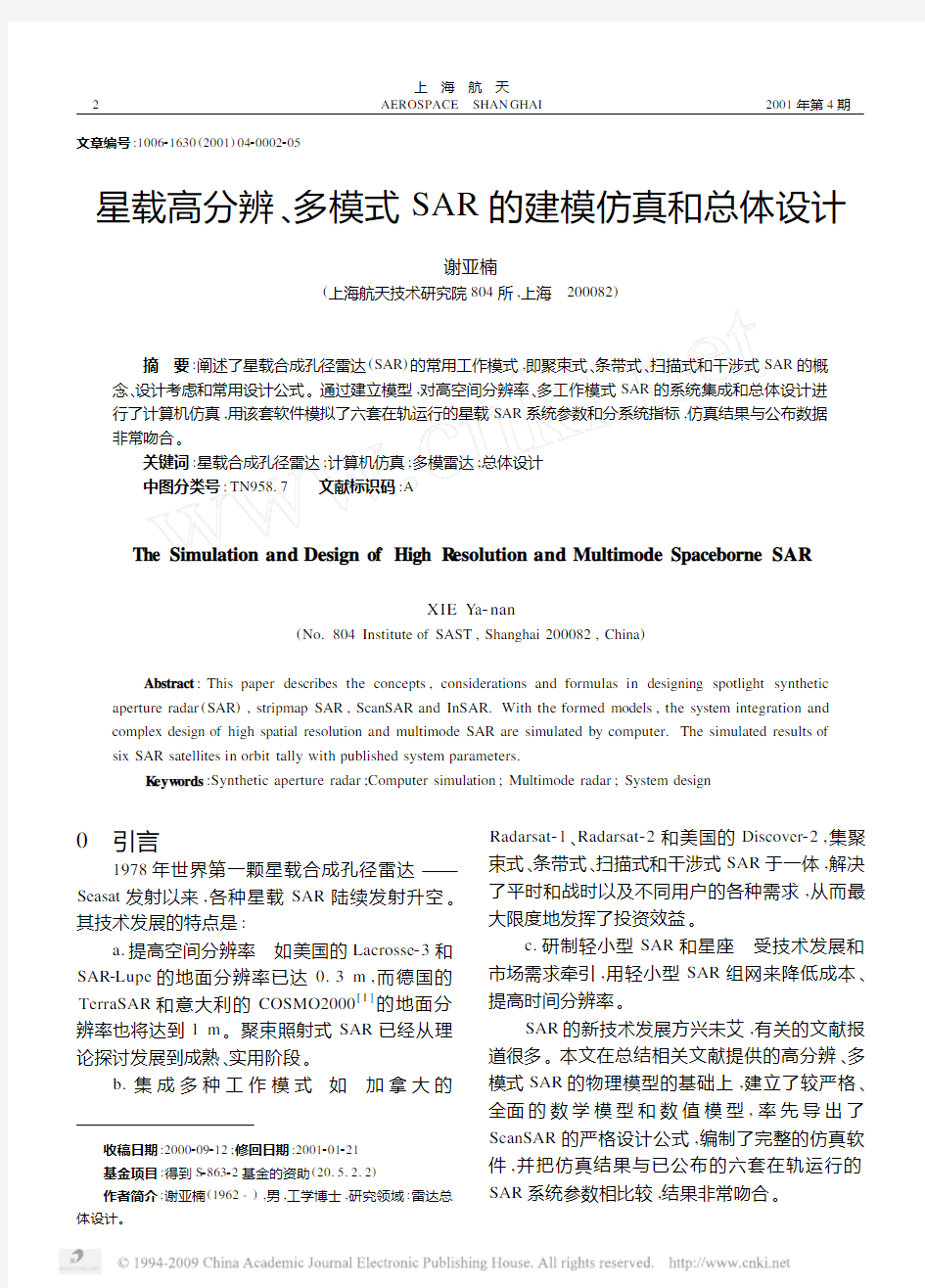
常用的正侧视、聚焦型星载SAR(见图1)的地面分辨率包括距离向分辨率δr和方位向分辨率δa[3]
δ
r
=k r c/(2B r sinθ)(1)
δ
a =k aλR/(2T a v s)(2)
式中,k r和k a分别为距离向和方位向的信号处理
加权展宽系数;c为光速;θ为入射角;B r为雷达
信号频带宽度,即采集目标反射数据的频率范围;
λ为工作波长;R为斜距;v
s
是卫星飞行速率;T a
是回波信号相干积累时间
。
R e—地球平均半径;H—卫星轨道高度;α—下视角;φ—地心角
图1 卫星2地球系统几何关系示意图
B r和T a是决定空间分辨率的两个重要因
素,各国科学家为此作了不懈的努力,各种新技术
也层出不穷。例如线性调频脉冲压缩技术是最常
用的一种;步进频率波形技术也是快速发展的一
种。当然,线性调频和阶梯调频的脉压波形,在接
收大动态范围目标回波信号时,时间(距离)旁瓣
有时不能满足要求,而相位编码脉冲压缩信号可
以用数字法产生和进行处理,因而有更好的旁瓣。
采用程控相位编码波形,有助于提高图像处理质
量、提高系统距离分辨率和速度分辨率。相位编
码信号有二相编码信号、四相编码信号和多相编
码信号等。常用的二相编码信号有巴克码、M序
列码、L序列码和互补编码等。相位编码产生器
的特点有:对多普勒频移灵敏、有近似图钉形的模
糊图、解码运算较简单。对相位编码信号的数字
匹配滤波,如采用多位信息处理技术,可减少2
dB以上的信噪比损失。
T a在条带式SAR中,是实波束移过地物目
标的时间;在聚束式SAR中,是实波束凝视目标
的时间;在同时多波束式SAR中,是n个波束移
过地物目标的时间总和。
当然在信号带宽B r和回波多普勒频移带宽
B a很高的情况下,为了距离和速度不模糊,要求对回波信号进行高速采样、量化、压缩、存储,还要求合理选择高、中、低脉冲重复频率(PRF)或采用解模糊技术。
1.3 天馈线分系统
为扩大一次通过的观测带成像宽度,一般采用ScanSAR工作模式。有两种电扫描天线可供选择:一种是抛物面天线,它与大功率相控阵馈源配合使用,如美国的Lacrosse22,这是一种相对成熟的技术,但是存在波束宽度控制难、扫描范围窄等问题;另一种是各国都在大力发展的二维相扫有源固态平面相控阵。面天线增益可表示成[3] G=η?(4πA e/λ2)=η4π/(θrθa)(3)式中,η为天线效率;A e为天线有效口径面积;θ
r
、θa分别为扫描到某一波位时的距离向和方位向波束宽度。
在可变视角、可变波束宽度、可赋形波束的天线中,θr、θa是可控变量,在中心入射波位θ0,并且相位未加权时
θ
r
=k′aλ/L r,θa=k′aλ/L a
式中,L r、L a分别为天线距离向和方位向的实长度;k′r和k′a分别为天线距离向和方位向的口径幅度加权展宽系数,它们在发射和接收状态下可以不一样。
式(2)是一个通用公式,适用于多种工作模式。对于条带式
T a=Rθa/v g=Rk′aλ/(v g L a)(4)代入式(2)中得到
δ
a
=(L a/2)?(v g/v s)?(k a/k′a)(5)式中,v g是波束地面照射区位移速率。
可见方位分辨率优于L a/2。
为使接收回波功率和数据率保持相对稳定,一般要求瞬时地面观测带宽度W r不变。这样就要通过相位加权,改变距离向波束宽度,使最大入射角时,波束宽度最小。因此设计中L r必须满足
θ
r min
=W r cosθmax/R
L r≥k′rλ/(θr min cosΔθ)
式中,Δθ是最大波束扫描范围,且Δθ=θmax-θ
。
使用上述公式,可大大提高电扫描SAR的功率计算准确性。用文献[3]的雷达方程估算出的平均功率和峰值功率,对于卫星平台的能量设计和SAR对地观测时间估算都有用。
1.4 信号处理分系统
SAR信号处理的实质是通过大量的运算,把隐含在回波中的信息转化为人们可以判读的图像。成像处理以算法为核心,结合运动补偿、聚焦校正、多普勒系数提取、多视处理等技术,最后达到对地面目标的高保真成像。一般情况下,星载SAR把原始回波数据、定标信号和成像附加信号打包组合在一起,传输到中继星或地面接收站,由地面处理设备完成成像。
随着DSP技术日新月异的发展,性能更高、体积更小、功耗更低的处理设备促进了星上实时处理技术的发展。星上实时成像具有以下优点:
a.迅速分发、了解观测区域的情况;
b.根据需要成像,并把多个通道的数据融合在一起,从而提高图像质量,大大降低数据量和数传率;
c.图像数据可进一步提高压缩比;
e.地面接收设备简易、灵活。
SAR的成像算法目前较为成熟的有距离2多普勒(R2D)算法、Chirp2Scaling算法、ω2k算法以及聚束式工作的矩形法、极化法、压缩计数法、投影法和距离迁移法等。对距离向超分辨算法的选择,主要也是考虑运算量和性能两个因素,有子空间拟合类方法(如ML方法)和子空间分解类方法(如MUSIC方法)两大类。后者在高信噪比、高PRF情况下,性能优于前者。简化算法和硬件是工作重点。
2 多模式SAR系统的建模
常用的星载SAR工作模式有条带式、聚束式、扫描式和干涉式成像四种。
2.1 条带式工作模式
条带式SAR又可分为方位向单波束和多波束两种。方位向同时多波束可以提高方位向空间
分辨率,但对雷达系统的幅相一致性和卫星平台的指向精度、稳定性和热控装置要求较高,因而系统复杂、造价昂贵。一种有效的解决途径是在相控阵上用模拟、数字两级形成同时多波束[4,5]。条带式SAR 的设计相对比较成熟。根据图1,可得
α=arcsin R e
R e +H
sin θ
(6)<=θ-α
(7)R
2
=(R e +H )2+R 2
E -
2R e (R e +H )cos <
(8)θr =W r cos θ/R (9)αn =α-(θ
r /2)(10)αf =α+(θr /2)(11)θ=arcsin
R e +H
R e
sin α(12)
2.2 聚束式工作模式
聚束式SAR 就是将波束指向某个小区域,使回波信号相干积累时间骤增。经处理后,方位向分辨率成比例提高,但距离向分辨率同前一样,取决于带宽B r 。一般用二维相扫相控阵来实现,只
是方位向扫描范围很窄(≤±2°)。其设计方法可参考文献[6]。全景多普勒带宽
B a =4v s W a /(λR )=4v s θa /λ=4v s k ′
a /L a 式中,W a 是波束在方位向地距上形成的最大观测带宽度。
在条带式时,不难推出B a 另一形式的公式
B a =f D =k a v g /δa
2.3 扫描式工作模式
扫描式SAR 是星载SAR 的重要发展方向,在硬件和成本增加不大时,能够大大扩展其一次通过观测地区时的成像宽度,从而缩短重复观测周期。文献[7]对其工程设计方法作了详细讨论,本文推出一些更为严格的公式。这里首先定义三个时间概念:
a.成像循环时间T Fj =k ′a
λR j /(v gj L a ),由方位向波束宽度扫过地面目标的全部时间决定,此处j 表示第j 个波位;
b.波位驻留时间T Dj =k a λR j /(2v s δa );
c.扫描返回时间T Rj ,表示j 波位的两个相
邻驻留时间间隔。
根据ScanSAR 工作时间安排,对每一个波位都有如下关系:
∑N
b
j =1
T
Dj
≤T Rj (13)T Fj =T Dj +N l T Rj
(14)
式中,N b 为波位数;N l 为多视数。联立求解得到
∑
N
b
j =1
k a λR j 2v s δa ≤λR j N l k ′
a v gj L a -k a
2v s δa
(15)
考虑极限情况,即左边R j 用R f j 代替,右边R j 用R n 代替,整理出ScanSAR 的最佳方位分辨率
δScan
a
=k a k ′
a v gn L a 2v s
N l
∑N
b
j =1
R
f j /R n +1(16)
上式的一个近似表达式是
δScan a
=δa (N l N b +1)(17)
式中,δa 是普通工作模式时SAR 的方位分辨率。
最坏的地距分辨率为
δScan r =k r c/(2B r sin θmin )(18)最大的组合观测带宽度为
W
Scan
=N b W r (1-10%)(19)
式中的10%指相邻波位要有重叠。最大可视观
测带宽度
W max =R e ( 术(如BAQ 技术),一般选取量化的比特位数n =3~4,选取过采样系数k =1.1~1.3。如果把回波数据采样、量化、压缩、存储到整个脉冲重复周期内,那么根据采样定理,并考虑到I 和Q 两路各8位采样,得到总回波数据率D 为 D =2 ∑N b j -1N l nkB r T w j T pj =2∑ N b j =1 N l nkB r f pj 2(R f j -R nj ) c (21) 2.4 干涉式工作模式 前面论述的SAR 对地面目标成像和光学照相相似,只是一幅固定的平面图像。但战场侦察 有更高的要求,即运动目标成像和三维成像,这就是干涉式SAR的功能: a.对运动目标检测(M TI)与成像 SAR对运动目标检测是利用“沿路径相位测量”技术,即沿飞行路径方向有前后两个天线和两路接收通道。SAR以固定的PRF发射相参脉冲信号时,两个天线接收到地面固定目标的脉冲回波相位差是一个固定的常数。但从动目标接收到的相位差与固定目标不同,且随目标运动速度的不同而变化。因此,如将两天线接收到的信号按固定目标相位差补偿并相减,则固定目标都相互抵消,而运动目标则留存下来,可被检测和显示,并可测出其地面速度。 b.对目标的测高和三维成像 SAR对目标测高是运用“交叉路径相位测量”技术,即沿飞行路线垂直方向交叉放置两副天线与各自的接收通道。对同一地物目标,这两副天线接收到回波的相位差是由两种脉冲往返的行程差决定的,而行程差又决定于目标的高度。把地物每一点的高度测出,再与地物的平面图像配合,就可绘出三维立体图。对同一地点,通过靠近的两次平行飞行进行信号录取并替代两副天线的同时接收,也可完成三维成像。 3 多模式SAR系统的仿真 上述工作模式,除干涉式外,其余在硬件设备上差别不大,主要是通过控制程序和成像算法来实现。作者与课题组一起进行了高空间分辨、多工作模式的星载SAR系统的建模仿真和总体优化设计工作,已完成仿真程序的编写和调试工作。 程序分为高分辨聚束模式、中分辨条带模式、低分辨条带模式和宽可视带扫描模式四个模块。通过友好的界面和人机对话形式,输入SAR系统的原始数据和基本选项,就可直接计算出SAR系统性能和各分系统指标要求。程序用Fortran语言编写,建立了完整的卫星2地球坐标系和严格的雷达方程,进行了全部模糊度计算和脉冲重复频率选择,可直接计算出在四种工作模式、不同波段、不同入射角或下视角情况下的如下各参数:空间分辨率、平均和峰值功率、有效载荷短期功耗、信噪比、扫描波数、数据率、天线增益、观测带宽度和最大可视观测带宽度等,并可进行波位设计。其中集总或分布式馈电效率、信号量化位数、脉宽、卫星轨道高度、天线尺寸和效率、馈线损耗、天线口径和信号处理的不同加权系数等是输入参数。程序中还包含了超分辨技术、同时多波束技术和多视技术等模块。 用该程序模拟了Radarsat21、Radarsat22、J ERS21、Seasat、SIR2C/X2SAR的设计,所得仿真结果与公布的实测结果非常一致。该程序已应用于国外TerraSAR、COSMO2000仿真和国内今后几种类型SAR的总体方案论证、分系统指标分配和多工作模式系统集成。 4 结束语 由于系统各个参数之间存在着复杂的相互制约关系,通过建立完整的物理模型,并用较严格的数学模型和数值模型进行计算机仿真,同时进行容差分析,可以准确、方便、快速和经济地进行系统集成和总体设计。在已具备的技术基础之上,找到最优的技术配置和折衷方案,并模拟、分析创新方案的利弊。本工作按此要求开展,并达到预期目标。 参考文献 [1] Manfred W.From X2SAR to TerraSAR[C].1999 International Conference on Radar Systems.南京:现 代雷达杂志社,2000.4912496. [2] 王继学.双频多极化多模式成像雷达方案论证报告 [R].上海航天技术研究院804所,1997:13216. [3] 谢亚楠.雷达方程在星载合成孔径雷达中的应用研 究[J].上海航天,2000,17(6):124. [4] 杨荣熙.模数结合的同时多波束形成系统设计[C]. 第七届全国雷达学术年会论文集.南京:现代雷达 杂志社,1999:1072111. [5] Nelander A.Multiple2beam generation and processing in phased array radar[C].1998Proceedings of Inter2 national Radar Symposium.南京:现代雷达杂志社, 2000:332942. [6] 邵智民.聚束照射合成孔径雷达的信号处理算法 [M].南京:现代雷达杂志社,1997:22. [7] 袁孝康.星载波束扫描合成孔径雷达的性能分析和 设计约束[J].上海航天,1997,14(5):50255. 通信系统建模与仿真课程设计2011 级通信工程专业1113071 班级 题目基于SIMULINK的基带传输系统的仿真姓名学号 指导教师胡娟 2014年6月27日 1任务书 试建立一个基带传输模型,采用曼彻斯特码作为基带信号,发送滤波器为平方根升余弦滤波器,滚降系数为0.5,信道为加性高斯信道,接收滤波器与发送滤波器相匹配。发送数据率为1000bps,要求观察接收信号眼图,并设计接收机采样判决部分,对比发送数据与恢复数据波形,并统计误码率。另外,对发送信号和接收信号的功率谱进行估计。假设接收定时恢复是理想的。 2基带系统的理论分析 1.基带系统传输模型和工作原理 数字基带传输系统的基本组成框图如图1 所示,它通常由脉冲形成器、发送滤波器、信道、接收滤波器、抽样判决器与码元再生器组成。系统工作过程及各部分作用如下。 g T(t) n 定时信号 图 1 :数字基带传输系统方框图 发送滤波器进一步将输入的矩形脉冲序列变换成适合信道传输的波形g T(t)。这是因为矩形波含有丰富的高频成分,若直接送入信道传输,容易产生失真。 基带传输系统的信道通常采用电缆、架空明线等。信道既传送信号,同时又因存在噪声n(t)和频率特性不理想而对数字信号造成损害,使得接收端得到的波形g R(t)与发送的波形g T(t)具有较大差异。 接收滤波器是收端为了减小信道特性不理想和噪声对信号传输的影响而设置的。其主要作用是滤除带外噪声并对已接收的波形均衡,以便抽样判决器正确判决。 抽样判决器首先对接收滤波器输出的信号y(t)在规定的时刻(由定时脉冲cp控制)进行抽样,获得抽样信号{r n},然后对抽样值进行判决,以确定各码元是“1”码还是“0”码。 2.基带系统设计中的码间干扰和噪声干扰以及解决方案 生产系统建模与及仿真 实验报告 实验一Witness仿真软件认识 一、实验目的 1、学习、掌握Witness仿真软件的主要功能与使用方法; 2、学习生产系统的建模与仿真方法。 二、实验内容 学习、掌握Witness仿真软件的主要功能与使用方法 三、实验报告要求 1、写出实验目的: 2、写出简要实验步骤; 四、主要仪器、设备 1、计算机(满足Witness仿真软件的配置要求) 2、Witness工业物流仿真软件。 五、实验计划与安排 计划学时4学时 六、实验方法及步骤 实验目的: 1、对Witness的简单操作进行了解、熟悉,能够做到基本的操作,并能够进行简单的基础建模。 2、进一步了解Witness的建模与仿真过程。 实验步骤: Witness仿真软件是由英国lanner公司推出的功能强大的仿真软件系统。它可以用于离散事件系统的仿真,同时又可以用于连续流体(如液压、化工、水力)系统的仿真。目前已成功运用于国际数千家知名企业的解决方案项目,有机场设施布局 优化、机场物流规划、电气公司的流程改善、化学公司的供应链物流系统规划、工厂布局优化和分销物流系统规划等。 ◆Witness的安装与启动: ?安装环境:推荐P4 1.5G以上、内存512MB及以上、独立显卡64M以上显存,Windows98、Windows2000、Windows NT以及Windows XP的操作系统支持。 ?安装步骤:⑴将Witness2004系统光盘放入CD-ROM中,启动安装程序; ⑵选择语言(English);⑶选择Manufacturing或Service;⑷选择授权方式(如加密狗方式)。 ?启动:按一般程序启动方式就可启动Witness2004,启动过程中需要输入许可证号。 ◆Witness2004的用户界面: ?系统主界面:正常启动Witness系统后,进入的主界面如下图所示: 主界面中的标题栏、菜单栏、工具栏状态栏等的基本操作与一般可视化界面操作大体上一致。这里重点提示元素选择窗口、用户元素窗口以及系统布局区。 ?元素列表窗口:共有五项内容,分类显示模型中已经建立和可以定义的模型元素。Simulation中显示当前建立的模型中的所有元素列表;Designer中显示当前Designer Elements中的所有元素列表;System中显示系默认的特殊地点;Type中 一、基本概念 1、数字正弦载波调制 在通信中不少信道不能直接传送基带信号,必须用基带信号对载波波形的某些参量进行控制,使得载波的这些参量随基带信号的变化而变化,即所谓数字正弦载波调制。 2、数字正弦载波调制的分类。 在二进制时, 数字正弦载波调制可以分为振幅键控(ASK)、移频键控(FSK)和移相键控(PSK)三种基本信号形式。如黑板所示。 2、高斯白噪声信道 二、实验原理 1、实验系统组成 2、实验系统结构框图 图 1 2FSK信号在高斯白噪声信道中传输模拟框图 各个模块介绍p12 3、仿真程序 x=0:15;% x表示信噪比 y=x;% y表示信号的误比特率,它的长度与x相同FrequencySeparation=24000;% BFSK调制的频率间隔等于24KHz BitRate=10000;% 信源产生信号的bit率等于10kbit/s SimulationTime=10;% 仿真时间设置为10秒SamplesPerSymbol=2;% BFSK调制信号每个符号的抽样数等于2 for i=1:length(x)% 循环执行仿真程序 SNR=x(i);% 信道的信噪比依次取中的元素 sim('project_1');% 运行仿真程序得到的误比特率保存在工作区变量BitErrorRate中 y(i)=mean(BitErrorRate); end hold off% 准备一个空白的图 semilogy(x,y);%绘制的关系曲线图,纵坐标采用对数坐标 三、实验结论 图 4 2FSK信号误比特率与信噪比的关系曲线图 系统建模与仿真(二) ——BFSK在多径瑞利衰落信道中的传输性能 一、基本概念 多径瑞利衰落信道 二、实验原理 1、实验系统组成 实验1 Witness仿真软件认识 一、实验目的 熟悉Witness 的启动;熟悉Witness2006用户界面;熟悉Witness 建模元素;熟悉Witness 建模与仿真过程。 二、实验内容 1、运行witness软件,了解软件界面及组成; 2、以一个简单流水线实例进行操作。小部件(widget)要经过称重、冲洗、加工和检测等操作。执行完每一步操作后小部件通过充当运输工具和缓存器的传送带(conveyer)传送至下一个操作单元。小部件在经过最后一道工序“检测”以后,脱离本模型系统。 三、实验步骤 仿真实例操作: 模型元素说明:widget 为加工的小部件名称;weigh、wash、produce、inspect 为四种加工机器,每种机器只有一台;C1、C2、C3 为三条输送链;ship 是系统提供的特殊区域,表示本仿真系统之外的某个地方; 操作步骤: 1:将所需元素布置在界面: 2:更改各元素名称: 如; 3:编辑各个元素的输入输出规则: 4: 运行一周(5 天*8 小时*60 分钟=2400 分钟),得到统计结果。5:仿真结果及分析: Widget: 各机器工作状态统计表: 分析:第一台机器效率最高位100%,第二台机器效率次之为79%,第三台和第四台机器效率低下,且空闲时间较多,可考虑加快传送带C2、C3的传送速度以及提高第二台机器的工作效率,以此来提高第三台和第四台机器的工作效率。 6:实验小结: 通过本次实验,我对Witness的操作界面及基本操作有了一个初步的掌握,同学会了对于一个简单的流水线生产线进行建模仿真,总体而言,实验非常成功。 系统建模与仿真项目驱动设计报告 学院:电气工程与自动化学院 专业班级:自动化143班 学号:2420142928 学生姓名:李荣 指导老师:杨国亮 时间:2016年6月10号 仿真技术是一门利用物理模型或数学模型模拟实际环境进行科学实验的技术,具有经济、可靠、实用、安全、灵活和可多次重复使用的优点。 本文中将使用Matlab软件实现一个简单的控制系统仿真演示,可实现对一些连续系统的数字仿真、连续系统按环节离散化的数字仿真、采样控制系统的数字仿真以及系统的根轨迹、伯德图、尼克尔斯图和奈氏图绘制。 本设计完成基本功能的实现,基于Matlab的虚拟实验仿真的建立和应用,培养了我们的兴趣,提高了我们的实践能力。 关键字:Matlab;系统数字仿真;根轨迹;伯德图。 第一章概述 (4) 1.1 设计目的 (4) 1.2 设计要求 (4) 1.3设计内容 (4) 第二章 Matlab简介 (6) 2.1 Matlab的功能特点 (6) 2.2 Matlab的基本操作 (6) 第三章控制系统仿真设计 (8) 3.1 控制系统的界面设计 (8) 3.2 控制系统的输入模型设计 (9) 3.3 欧拉法的Matlab实现 (12) 3.4 梯形法的Matlab实现 (14) 3.5 龙格-库塔法的Matlab实现 (15) 3.6 双线性变换法的Matlab实现 (16) 3.7 零阶保持器法的Matlab实现 (17) 3.8 一阶保持器法的Matlab实现 (18) 3.9 系统PID控制的Matlab实现 (19) 3.10 系统根轨迹的绘制 (21) 3.11系统伯德图的绘制 (22) 3.12系统尼克尔斯图的绘制 (23) MATLAB/Simulink 电力系统建模与仿真 实验报告 姓名:****** 专业:电气工程及其自动化 班级:******************* 学号:******************* 实验一无穷大功率电源供电系统三相短路仿真 1.1 无穷大功率电源供电系统仿真模型构建 运行MATLAB软件,点击Simulink模型构建,根据电路原理图,添加下列模块: (1)无穷大功率电源模块(Three-phase source) (2)三相并联RLC负荷模块(Three-Phase Parallel RLC Load) (3)三相串联RLC支路模块(Three-Phase Series RLC Branch) (4)三相双绕组变压器模块(Three-Phase Transformer (Two Windings)) (5)三相电压电流测量模块(Three-Phase V-I Measurement) (6)三相故障设置模块(Three-Phase Fault) (7)示波器模块(Scope) (8)电力系统图形用户界面(Powergui) 按电路原理图连接线路得到仿真图如下: 1.2 无穷大功率电源供电系统仿真参数设置 1.2.1 电源模块 设置三相电压110kV,相角0°,频率50Hz,接线方式为中性点接地的Y形接法,电源电阻0.00529Ω,电源电感0.000140H,参数设置如下图: 1.2.2 变压器模块 变压器模块参数采用标幺值设置,功率20MVA,频率50Hz,一次测采用Y型连接,一次测电压110kV,二次侧采用Y型连接,二次侧电压11kV,经过标幺值折算后的绕组电阻为0.0033,绕组漏感为0.052,励磁电阻为909.09,励磁电感为106.3,参数设置如下图: 1.2.3 输电线路模块 根据给定参数计算输电线路参数为:电阻8.5Ω,电感0.064L,参数设置如下图: 1.2.4 三相电压电流测量模块 此模块将在变压器低压侧测量得到的电压、电流信号转变成Simulink信号,相当于电压、电流互感器的作用,勾选“使用标签(Use a label)”以便于示波器观察波形,设置电压标签“Vabc”,电流标签“Iabc”,参数设置如下图: 机械系统建模与仿真 机理建模法 所谓机理模型,实际上就是采用由一般到特殊的推理理演绎方法,对巳知结构、参数的物理系统运用相应的物理定律或定理,经过合理分析简化建立起来描述系统各物理员动、静态变化性能的数学模型。 因此,机理建模法主要是通过理论分析推导方法建立系统模型。根据确定元件或系统行为所遵循的自然机理,如常用的物质不灭定律(用于液位、压力调节等)、能量守恒定律(用于温度调节等)、牛顿第二定律(用于速度、加速度调节等)、基尔霍夫定律(用于电气网络)等等,对系统各种运功规律的本质进行描述,包括质量、能量的变换和传递等过程,从而建立起变量间相互制约又相互依存的精确的数学关系。通常情况下,是给出微分方程形式或其派生形式——状态方程、传 递函数等。 实验建模法 所谓实验建模法,就是采用出特殊到一般的逻辑归纳方法,根据一定数量的在系统运行过程中的实测、观察的物理量数据,运用统计规律、系统辨识等理论合理估计出反映系统各物理量相互制约关系的数学模型。其主要依据是来自系统的大量实测数据.出此义称之为实验测定法。 当对所研究系统的内部结构和特性尚不清楚、甚至无法了解时,系统内部的机理变化规律就不能确定,通常称之为·黒箱”或“灰箱”问题,机理建模法也就无法应用。而根据所测到的系统输入输出数据,采用一定方法进行分析及处理来获得数学模型的统计模型法正好适应这种情况。通过对系统施加激励,观察和测取其响应,了解其内部変量的特性,并建立能近似反映同样变化的模拟系统的数学模型,就相当于建立起实际系统的数学描述(方程、曲线或图表等)。 (1)频率特性法 频率特性法是研究控制系统的一种应用广泛的工程实用方法。其特点在是通过建立系统频率响应与正弦输入信号之间的稳态特性关系,不仅可以反映系统的稳态性能,而且可以用来研究系统的稳定性和暂态性能;可以根据系统的开环频率特性,判别系统闭环后的各种性能;可以较方便地分析系统参数对动态性能的影响,并能大致指出改善系统性能的途径。 (2)系统辨识法 系统辨识法是现代控制理论与系统建模中常用的方法,它是依据测量到的输人与输出数据来建方静态与动态系统的数学模型,但其输出响应不局限于频率响应,阶压响应或脉冲响应等时间响应都可作为反映系统模型静态与动态特性的重要信息;而且,确定模型的过程更依赖于各种高效率的最优算法以及如何保证所测取数据的可靠性。因 某某大学 《电力系统建模及仿真课程设计》总结报告 题目:基于MATLAB的电力系统短路故障仿真于分析 姓名 学号 院系 班级 指导教师 摘要:本次课程设计是结合《电力系统分析》的理论教学进行的一个实践课程。 电力系统短路故障,故障电流中必定有零序分量存在,零序分量可以用来判断故障的类型,故障的地点等,零序分量作为电力系统继电保护的一个重要分析量。运用Matlab电力系统仿真程序SimPowerSystems工具箱构建设计要求所给的电力系统模型,并在此基础上对电力系统多中故障进行仿真,仿真波形与理论分析结果相符,说明用Matlab对电力系统故障分析的有效性。实际中无法对故障进行实验,所以进行仿真实验可达到效果。 关键词:电力系统;仿真;短路故障;Matlab;SimPowerSystems Abstract: The course design is a combination of power system analysis of the theoretical teaching, practical courses. Power system short-circuit fault, the fault current must be zero sequence component exists, and zero-sequence component can be used to determine the fault type, fault location, the zero-sequence component as a critical analysis of power system protection. SimPowerSystems Toolbox building design requirements to the power system model using Matlab power system simulation program, and on this basis, the power system fault simulation, the simulation waveforms with the theoretical analysis results match, indicating that the power system fault analysis using Matlab effectiveness. Practice can not fault the experiment, the simulation can achieve the desired effect. Keywords: power system; simulation; failure; Matlab; SimPowerSystems - 1 - 目录 一、引言 ............................................ - 3 - 知识点2 1. 结合具体制造系统或服务系统,分析离散事件动态系统的基本特征。 2. 什么叫“状态空间爆炸”?产生状态空间爆炸的原因是什么?它给系统性能分析带来哪些 挑战? 3. 常用的离散事件系统建模方法有哪些,它们是如何分类的? 4. 什么是马尔可夫特性?它在离散事件系统建模与分析中有什么作用? 5. 根据功能不同,仿真模型(程序)可以分为哪三个层次?分析三个层次之间的关系。 6. 分析事件调度法、活动循环法、进程交互法和消息驱动法等仿真调度方法的特点,在分 析每种调度方法基本原理的基础上,阐述几种仿真调度方法之间的区别与联系,并绘制每种仿真调度方法的流程图。 7. 结合具体的离散事件系统,如银行、理发店、餐厅、超市、医院、作业车间等,采用事 件调度法、活动循环法或进程交互法分析建立此类系统的仿真模型,试分析仿真模型中的建模元素以及仿真调度流程。 8. 从系统描述、建模要点、仿真时钟推进机制等层面,比较事件调度法、活动循环法和进 程交互法的异同之处。 9. 什么叫仿真时钟,它在系统仿真中有什么作用?什么叫仿真时钟推进机制?常用的仿真 时钟推进机制有哪些?它们的主要特点是什么,分别适合于怎样的系统? 10.结合具体的离散事件系统,分析若采用固定步长时间推进机制、下次事件时间推进机制 或混合时间推进机制时,分别具有哪些优点和缺点,以图形或文字等形式分析时钟推进流程。 11.什么叫仿真效率?什么叫仿真精度?分析影响仿真效率和仿真精度的因素? 12.从仿真效率和仿真精度的角度,分析和比较三种仿真时钟推进机制的特点,并分析三种 仿真时钟推进机制分别适合于什么样的系统? 13. 什么是蒲丰投针试验?绘制蒲丰投针试验原理图,通过推导蒲丰投针试验中针与任一直 线相交的概率,分析采用随机投针试验方法来确定圆周率π的原理。 14. 按照蒲丰投针试验的条件和要求,完成投针试验,在统计投针次数、针与直线的相交次 数的基础上,求解π的估计值,并以报表或图形等形式表达试验结果。具体要求如下: ①自行确定针的长度、直线之间的距离。 ②投针10次、20次、30次、40次、50次、…、100次、…、200次、…,分别计算针 与直线相交的概率、π的估计值。 ③以一随机变量描述上述试验结果,并通过编程或采用商品化软件,以图形、报表等形 式表示投针试验结果,分析其中的规律,并给出结论。 ④写出试验报告。 ⑤在熟悉投针试验原理的基础上,编制投针试验仿真程序,动态运行投针试验的过程。15.什么是蒙特卡洛仿真?它有什么特点,蒙特卡洛仿真应用的基本步骤是什么? 16.采用C或C++等语言,分别编写产生均匀分布、正态分布、指数分布以及威布尔分布的伪随机数序列,通过改变每种分布中参数的数值,分析不同参数数值对随机数值的影响;通过对所产生的伪随机数分布区间的统计、分析和绘图,检验伪随机数的特性及其数值特征。 17. 对于制造系统而言,库存有哪些作用和功能? 18. 在制造企业中,库存大致可以分成四种类型。简要论述四种库存的名称和功能。 19. 什么是安全库存、订货提前期?确定安全库存和订货提前期时分别需要考虑哪些因素? 20. 什么叫“订货点法”?要确定订货点,需要哪些条件?订货点法适合于怎样的库存系统? 《生产物流系统建模与仿真》课程设计 2012-2013学年度第一学期 姓名孙会芳 学号 099094090 班级工093 指导老师暴伟霍颖 目录 一、课程任务书 (3) 1.题 目............................................................... (3) 2.课程设计内容 (3) 3.课程设计要求 (4) 4.进度安排 (4) 5.参考文献 (4) 二、课程设计正文 (5) 1、题目 (5) 2、仿真模型建立 (5) (1)实体元素定义 (5) (2)元素可视化的设置 (6) (3)元素细节设计 (8) (4 ) 模型运行和数据.................................................................. . (10) (5)模型代码 (12) (6)模型改进 (16) 3.实验感想 (17) 三、参考文献 (18) 《生产物流系统建模与仿真》课程设计任务书 1. 题目 离散型流水作业线系统仿真 2. 课程设计内容 系统描述与系统参数: (1)一个流水加工生产线,不考虑其流程间的空间运输。 (2)两种工件A,B分别以正态分布和均匀分布的时间间隔进入系统,A进入队列Q1, B进入队列Q2,等待检验。(学号最后位数对应的仿真参数设置按照下表进行) (3)操作工人labor1对A进行检验,每件检验用时2分钟,操作工人labor2对B进行检验,每件检验用时2分钟。 (4)不合格的工件废弃,离开系统;合格的工件送往后续加工工序,A的合格率为65%,B的合格率为95%。 (5)工件A送往机器M1加工,如需等待,则在Q3队列中等待;B送往机器M2加工,如需等待,则在Q4队列中等待。 (6)A在机器M1上的加工时间为正态分布(5,1)分钟;B在机器M2上的加工时间为正态分布(8,1)分钟。 制造系统建模与仿真学习心得 一、制造系统建模与仿真的含义 1.制造系统制造系统是制造过程及其所涉及的硬件、软件和人员所组成的一个将制造资源转变为产品或半成品的输入/输出系统,它涉及产品生命周期(包括市场分析、产品设计、工艺规划、加工过程、装配、运输、产品销售、售后服务及回收处理等)的全过程或部分环节。其中,硬件包括厂房、生产设备、工具、刀具、计算机及网络等;软件包括制造理论、制造技术(制造工艺和制造方法等)、管理方法、制造信息及其有关的软件系统等;制造资源包括狭义制造资源和广义制造资源;狭义制造资源主要指物能资源,包括原材料、坯件、半成品、能源等;广义制造资源还包括硬件、软件、人员等。随着科技的进步,制造系统的发展也经历了传统手工生产、机械化、自动化孤岛、集成制造、并行工程和敏捷制造等几个阶段。 2.模型与仿真模型是对真实对象和真实关系中那些有用的和让人感兴趣的特性的抽象,是对系统某些本质方面的描述。它以各种可用的形式描述被研究系统的信息。系统模型并不是对真实系统的完全复现,而是对系统的抽象,而仿真是通过对模型的实验以达到研究系统的目的,当制造系统尚未建立或者研究时间长成本高以及从安全性考虑我们有必要对制造系统预先进行建模并仿真以确定系统的最佳结构和配置方案、防止较大的经济损失、确定合理高效的作业计划,从而提高经济效益。 制造系统建模与仿真技术是以相似原理、模型理论、系统技术、信息技术以及建模与仿真应用领域的有关专业技术为基础,以计算机系统、与应用相关的物理效应设备及仿真器为工具,利用模型参与已有或设想的制造系统进行研究、分析、设计、加工生产、试验、运行、评估、维护、和报废(全生命周期)活动的一门多学科的综合性技术。 二、系统建模与仿真的发展及类型 1.系统建模与仿真的发展大致经历了这么几个阶段:1600—1940年左右,这一时期的建模仿真主要是在物理科学基础上的建模;20世纪40年代,由于电子计算机的出现,建模仿真技术开始飞速发展;20世纪50年代中期,建模仿真开始应用与航空领域;20世纪60年代,这一阶段主要是工业控制过程中的仿真;20世纪70年代,开始出现了包括经济、社会和环境因素的大系统仿真。到70年代中期,出现了系统与仿真的结合,如用于随机网络建模的SLAM仿真系统。在这一时期,系统仿真开始与更高级的决策结合,出现了决策支 设计一产生十种不同分布的独立的随机数 一、设计内容及要求 任务:产生十种不同分布的独立的随机数,并进行检验。 要求:对随机数进行的统计性检验包括频率检验、参数检验、独立性检验。 二、设计环境及工具 Windows7、MatlabR2010b 三、设计思想及方法 (1) 在对雷达系统进行仿真时,首当其冲的问题就是对电磁环境 的仿、真。其中无用的电磁信号包括三大类,即杂波、噪声和干扰,在模拟仿真时相比于有用的电磁信号也是不可或缺的。其所谓的仿真就是在已知随机变量的统计特性及其参数的情况下,研究如何在计算机上产生服从给定统计特性和参数的随机变量。 (2) 在雷达、导航、声呐、通信和电子对抗等系统中,应用最多 的概率统计模型还是正态分布或高斯分布、指数分布、瑞利分布、莱斯分布或广义瑞利分布、韦尔分布、对数-正态分布、m分布、拉普拉斯分布、复合k分布等。 (3) 在这些随机总体中畸形随机抽样,实际上都是以[0,1]区间上 的均匀分布随机总体为基础的。原则上讲,只要已知[0,1]区间上的均匀分布随机数序列,总可以通过某种方法(数学方法)来获得某已知分布的简单子样。只要给定的均匀分布随机数列满足均匀 且相互独立打的要求,经过严格的数学变换或者严格的数学方法,所产生的任何分布的简单子样都会满足具有相同总体分布和相互独立的要求。 四、设计过程及结果 本次设计的十种随机数包括均匀分布、高斯分布、指数分布、广 义指数分布、瑞利分布、广义瑞利分布、韦尔分布、拉普拉斯分布、柯西分布和2χ分布,使用Matlab 完成设计并给出具体的参数,代码附在最后。 1.均匀分布 已知随机变量ε在[0,1]区间上服从均匀分布,则有概率密度函数 1,01 ()0,x f x ≤≤?=?? 其他 其分布函数为 0,0F(),01 x x x x x 设计报告一十种随机数的产生 一概述 . 概论论是在已知随机变量的情况下,研究随机变量的统计特性及其参量,而随机变量的仿真正好与此相反,是在已知随机变量的统计特性及其参数的情况下研究如何在计算机上产生服从给定统计特性和参数随机变量。 下面对雷达中常用的模型进行建模: 均匀分布 高斯分布 指数分布 广义指数分布 瑞利分布 广义瑞利分布 Swerling 分布 t分布 对数一正态分布 韦布尔分布 二随机分布模型的产生思想及建立 . 产生随机数最常用的是在(0,1) 区间内均匀分布的随机数,其他分布的随机数可利用均匀分布随机数来产生。 均匀分布 1>( 0, 1)区间的均匀分布: 用混合同余法产生(0,1)之间均匀分布的随机数,伪随机数通常是利用递推公式产生的,所用的混和同余法的递推公式为: x n 1 = x n +C(Mod m) 其中,C是非负整数。通过适当选取参数 C可以改善随机数的统计性质。一般取作小于 M的任意奇数正整数,最好使其与模 M互素。其他参数的选择 (1)的选取与计算机的字长有关。 (2) x(1) 一般取为奇数。 用Matlab 来实现,编程语言用 Matlab 语言,可以用 hist 数的直方图(即统计理论概率分布的一个样本的概率密度函数) 函数画出产生随机,直观地看出产 生随机数的有效程度。其产生程序如下: c=3;lamade=4*200+1; x(1)=11; M=2^36; for i=2:1:10000; x(i)=mod(lamade*x(i-1)+c,M); end; x=x./M; hist(x,10); mean(x) var(x) 运行结果如下: 均值 =方差= 2> (a,b )区间的均匀分布: 利用已产生的( 0,1)均匀分布随机数的基础上采用变换法直接产生(a,b)均匀分布的随机数。 其概率密度函数如下: 1 p( x) b a a x b 0 x a, x b 其产生程序如下: c=3;lamade=4*201+1; a=6;b=10; x(1)=11;M=2^36; for i=2:1:10000; x(i)=mod(lamade*x(i-1)+c,M); 《系统辨识》 实验手册 哈尔滨工业大学控制与仿真中心 2018年5月 目录 实验1 白噪声和M序列的产生---------------------------------------------------------- 2 实验2 脉冲响应法的实现---------------------------------------------------------------- 5 实验3 递推最小二乘法的实现---------------------------------------------------------- 9 附录实验报告模板---------------------------------------------------------------------- 13 实验1 白噪声、M 序列的产生 一、实验目的 1、熟悉并掌握产生均匀分布随机序列方法以及进而产生高斯白噪声方法 2、熟悉并掌握M 序列生成原理及仿真生成方法 二、实验原理 1、混合同余法 混合同余法是加同余法和乘同余法的混合形式,其迭代式如下: 11 1(*)mod /n n n n x a x b M R x M +++=+?? =? 式中a 为乘子,0x 为种子,b 为常数,M 为模。混合同余法是一种递归算法,即先提供一个种子0x ,逐次递归即得到一个不超过模M 的整数数列。 2、正态分布随机数产生方法 由独立同分布中心极限定理有:设随机变量12,,....,,...n X X X 相互独立,服从同一分布,且具有数学期望和方差: 2(),()0,(1,2,...)k k E X D X k μσ==>= 则随机变量之和1 n k i X =∑的标准化变量 : () n n n k k k X E X X n Y μ --= = ∑∑∑近似服从(0,1)N 分布。 如果n X 服从[0, 1]均匀分布,则上式中0.5μ=,2 1 12 σ= 。即 0.5n k X n Y -= ∑近似服从(0,1)N 分布。 1. 设计分析 1.1问题描述 系统由四台加工中心、五个托盘和装夹工具、一套搬运轨道和小车、一个 工件装夹区组成,其布局如图1所示。系统所包含的主要时间类别及大致时间 如下: (1) 工件安装时间。是指待加工工件装夹并固定在托盘上的时间,由于模具工 件均为长方体,因此,该时间比较稳定,大约 2mi ns 左右。 (2) 小车等待时间。工件安装完成后,如机床都在工作状态,则小车需等待有 机床完成 工作后,开始运出待加工工件。该等待时间不是固定的值,需要计算 得出。 (3) 机床等待时间。当有多个机床处于空置状态时,由于运输容量的限制,有 的机床就 处于空置等待状态,该状态所经历的时间,就是该机床的等待时间。 (4) 工件运出时间。将已安装好工件的托盘,从安装区运出至数控设备。大约 2mi ns 。 (5) 更换托盘时间。将设备上装载已加工好的零件的托盘与小车上装载待加工 工件的托 盘进行更换。大约需要1min 。 (6) 工件运回时间。更换托盘后,将载有已加工好的工件的托盘运回安装区, 并卸载。 大约需要3mins 。 图1系统布局图 1.2设计内容 1任务队列如表1所示,计算该队列条件下的任务总完成时间、四台设备各自 的设备等待 搬运 轨道 小车 时间,绘制四台设备的工序图。 2对任务队列进行排序优化,阐述优化的思路和方法,计算优化后的任务总完成时间、四台设备各自的设备等待时间,绘制四台设备的工序图。 表1设计案例参数表(单位:分钟) 1.3设计中的主要因素及系统分析 在本次的设计条件中,系统中共有20个任务,每个任务的加工时间是不相等的,而且只有一套运输设备,各个设备的功能完全一致。所以制约的加工的最大因素便是运输的制约。按照原始的顺序,进行加工,画出原始工序图。 再对原始任务工序图进行分析,并数据计算。计算出20个任务的总加工时间, 各个设备的等待时间,小车的等待时间。分析我们所得的数据结果,找出制约整个工序的主要问题所在,并进行改善。 在这个系统中共有20个加工时间各不相同的任务,按照顺序移动的方式来进行加工。在分析之前我们需先进行以下假设: (1)加工开始前,五个托盘分别位于四台加工中心及装夹区; (2)小车运出至每台加工中心的时间相等,运回至每台加工中心的时间也 相等。 (3)系统运行中不会出现故障等影响加工时间的意外 (4)小车一次只能进行一次托盘更换,最多只能运回一个工件,也最多只能运出 物流系统建模与仿真 单服务台排队系统仿真研究报告 ——选大学A区门口中国银行分行某一服务窗口为单服务台排队系统研究对象一、系统基本背景 社会的进步越来越快,人们的生活节奏也随之越来越快。在科技的发展,新技术的普及下, 我国的银行业以计算机和信息技术、互联网技术为前提, 通过大量资金和科技的投入, 不断地开发出新产品和新业务。另外有网上银行、支付宝等新业务的出现, 大大提高了工作效率。然而现代的金融服务并不是都可以靠刷卡来解决, 许多技术还不完善, 这些新技术也并不适合所有顾客群,去银行办理业务的顾客仍然经常性地出现排队现象。顾客等待时间过长, 造成顾客满意度下降, 矛盾较为突出, 因此本报告试利用单服务台排队论的方法, 定性定量地对具有排队等候现象的银行服务系统进行统计调查与分析研究,希望能帮助改进银行工作效率, 优化系统的运营。 本报告研究对象为中国银行大学处分行某一服务窗口,数据取自银行唯一非现金业务柜台。研究对象的选取虽然不是最典型的,但是综合考虑了研究地域围和小组成员作业时间有限,另有其他方案由于各种原因无法进行,故选择离学校 较近的有代表性的中国银行中的服务窗口作为最终方案。 中国银行简介:中国银行是中国历史最为悠久的银行之一,在大家对银行的概念中有着一定地位。中国银行主营传统商业银行业务,包括公司金融业务、个人金融业务和金融市场业务。公司业务以信贷产品为基础,致力于为客户提供个性化、创新的金融服务和融资、财务解决方案。个人金融业务主要针对个人客户的金融需求,提供包括储蓄存款、消费信贷和银行卡在的服务。作为中国金融行业的百年品牌,中国银行在稳健经营的同时,积极进取,不断创新,创造了国银行业的许多第一,在国际结算、外汇资金和贸易融资等领域得到业界和客户的广泛认可和赞誉。 二、系统描述 该银行工作时间为上午8:30至下午16:30(周一至周日),另周末不办理对公业务,属于每天8小时工作制。系统调查对象为银行唯一非现金业务柜台,可知到达的顾客中,需要办理非现金业务的顾客在正常现金业务柜台忙碌的情况下可以选择该服务台。在队列中,等待服务的顾客和服务台构成了一个排队系统。由于银行前台出纳员逐个接待顾客,当顾客较多的时候就会出现排队等待的现象。其中,顾客的到达是随机的,每两个先后到达的顾客的到达间隔时间是不确定的。 本排队系统用顾客的数目、到达模式、服务模式、系统容量和排队规则来描述。 为探求此排队系统的规律, 首先需确定顾客流在一定时间到达的概率分布 系统建模仿真技术的历史现状和发展趋势分析 工程133 胡浩3130212026 【摘要】:经过半个多世纪的发展,仿真技术已经成为对人类社会发展进步具有重要影响的一门综合性技术学科。本文对建模与仿真技术发展趋势作了较全面分析。仿真建模方法更加丰富,更加需要仿真模型具有互操作性和可重用性,仿真建模VVA与可信度评估成为仿真建模发展的重要支柱;仿真体系结构逐渐形成标准,仿真系统层次化、网络化已成为现实,仿真网格将是下一个重要发展方向;仿真应用领域 更加丰富,向复杂系统科学领域发展,并将更加贴近人们的生活。 工程系统的仿真,起源于自动控制技术领域。从最初的简单电子、机械系统,逐步发展到今天涵盖机、电、液、热、气、电、磁等各个专业领域,并且在控制器和执行机构两个方向上飞速发展。 控制器的仿真软件,在研究控制策略、控制算法、控制系统的品质方面提供了强大的支持。随着执行机构技术的发展,机、电、液、热、气、磁等驱动技术的进步,以高可靠性、高精度、高反应速度和稳定性为代表的先进特征,将工程系统的执行品质提升到了前所未有的水平。相对控制器本身的发展,凭借新的加工制造技术的支持,执行机构技术的发展更加富于创新和挑战,而对于设计、制造和维护高性能执行机构,以及构建一个包括控制器和执行机构的完整的自动化系统也提出了更高的要求。 AMESIM软件正是能够提供平台级仿真技术的工具。从根据用户需求,提供液压、机械、气动等设计分析到复杂系统的全系统分析, 到引领协同仿真技术的发展方向,AMESIM的发展轨迹和方向代表了工程系统仿真技术的发展历程和趋势。 一、系统仿真技术发展的现状 工程系统仿真作为虚拟设计技术的一部分,与控制仿真、视景仿真、结构和流体计算仿真、多物理场以及虚拟布置和装配维修等技术一起,在贯穿产品的设计、制造和运行维护改进乃至退役的全寿命周期技术活动中,发挥着重要的作用,同时也在满足越来越高和越来越复杂的要求。因此,工程系统仿真技术也就迅速地发展到了协同仿真阶段。其主要特征表现为: 1、控制器和被控对象的联合仿真:MATLAB+AMESIM,可以覆盖整个自动控制系统的全部要求。 2、被控对象的多学科、跨专业的联合仿真:AMESIM+机构动力学+CFD+THERMAL+电磁分析 3、实时仿真技术 实时仿真技术是由仿真软件与仿真机等半实物仿真系统联合实现的,通过物理系统的实时模型来测试成型或者硬件控制器。 4、集成进设计平台 现代研发制造单位,尤其是设计研发和制造一体化的大型单位,引进PDM/PLM系统已经成为信息化建设的潮流。在复杂的数据管理流程中,系统仿真作为CAE工作的一部分,被要求嵌入流程,与上下游工具配合。 1.1问题描述 系统由四台加工中心、五个托盘和装夹工具、一套搬运轨道和小车、一个工件装夹区组成,其布局如图1所示。系统所包含的主要时间类别及大致时间如下: (1) 工件安装时间。是指待加工工件装夹并固定在托盘上的时间,由于模具工件均为长方体,因此,该时间比较稳定,大约2mins 左右。 (2) 小车等待时间。工件安装完成后,如机床都在工作状态,则小车需等待有机床完成工作后,开始运出待加工工件。该等待时间不是固定的值,需要计算得出。 (3) 机床等待时间。当有多个机床处于空置状态时,由于运输容量的限制,有的机床就处于空置等待状态,该状态所经历的时间,就是该机床的等待时间。 (4) 工件运出时间。将已安装好工件的托盘,从安装区运出至数控设备。大约2mins 。 (5) 更换托盘时间。将设备上装载已加工好的零件的托盘与小车上装载待加工工件的托盘进行更换。大约需要1min 。 (6) 工件运回时间。更换托盘后,将载有已加工好的工件的托盘运回安装区,并卸载。大约需要3mins 。 图1 系统布局图 CNC CNC CNC CNC 搬运轨道 小车 工件装夹区 1 任务队列如表1所示,计算该队列条件下的任务总完成时间、四台设备各自的设备等待时间,绘制四台设备的工序图。 2 对任务队列进行排序优化,阐述优化的思路和方法,计算优化后的任务总完成时间、四台设备各自的设备等待时间,绘制四台设备的工序图。 表1 设计案例参数表(单位:分钟) 安装运出运回更换 2 2 3 1 任务1 任务2 任务3 任务4 7 15 21 5 任务5 任务6 任务7 任务8 12 33 17 38 任务9 任务10 任务11 任务12 8 19 22 25 任务13 任务14 任务15 任务16 16 27 31 6 任务17 任务18 任务19 任务20 245118 11 1.3设计中的主要因素及系统分析 在本次的设计条件中,系统中共有20个任务,每个任务的加工时间是不相等的,而且只有一套运输设备,各个设备的功能完全一致。所以制约的加工的最大因素便是运输的制约。按照原始的顺序,进行加工,画出原始工序图。再对原始任务工序图进行分析,并数据计算。计算出20个任务的总加工时间,各个设备的等待时间,小车的等待时间。分析我们所得的数据结果,找出制约整个工序的主要问题所在,并进行改善。 在这个系统中共有20个加工时间各不相同的任务,按照顺序移动的方式来进行加工。在分析之前我们需先进行以下假设: (1)加工开始前,五个托盘分别位于四台加工中心及装夹区; (2)小车运出至每台加工中心的时间相等,运回至每台加工中心的时间也相等。 研究生学位课 《工程系统建模与仿真》实验报告 (2017 年秋季学期) 姓名 学号 班级研一 专业机械电子 报告提交日期 哈尔滨工业大学 报告要求 1.实验报告统一用该模板撰写: (1)实验名称 (2)同组成员(必须写) (3)实验器材 (4)实验原理 (5)实验过程 (6)实验结果及分析 2.正文格式:小四号字体,行距单倍行距; 3.用A4纸单面打印;左侧装订; 4.报告需同时提交打印稿和电子文档进行存档,电子文档请发送至: xxx@https://www.doczj.com/doc/018103977.html,。 5.此页不得删除。 评语: 教师签名: 年月日 实验一报告正文 一、 实验名称 TH -I 型智能转动惯量实验 二、 同组成员(必须写) 17S 三、 实验器材(简单列出) 1. 扭摆及几种有规则的待测转动惯量的物体 2. 转动惯量测试仪 3. 数字式电子台秤 4. 游标卡尺 四、 实验原理(简洁) 将物体在水平面内转过一角度θ后,在弹簧的恢复力矩作用下物体就开始绕垂直轴作往返扭转运动。 根据虎克定律,弹簧受扭转而产生的恢复力矩M 与所转过的角度θ成正比,即 M =-K θ (1) 式中,K 为弹簧的扭转常数,根据转动定律 M =I β 式中,I 为物体绕转轴的转动惯量,β为 角加速度,由上式得 M I β= (2) 令2I K ω= ,忽略轴承的磨擦阻力矩,由式(1)、(2)得 222d K dt I θβθωθ==-=- 上述方程表示扭摆运动具有角简谐振动的特性,角加速度与角位移成正比, 且方向相反。此方程的解为: c o s () A t θωφ=+ 式中,A 为谐振动的角振幅,φ为初相位角,ω为角速度,此谐振动周期为 22T π ω = = (3) 由式(3)可知,只要实验测得物体扭摆的摆动周期,并在I 和K 中任何一个量已知时即可计算出另一个量。 五、 实验过程(简洁) 1. 用游标卡尺测出实心塑料圆柱体的外径D 1、空心金属圆筒的内、外径D 内、 D 外、木球直径D 直、金属细杆长度L ;用数字式电子秤测出各物体质量m (各测量3次求平均值)。通信系统建模与仿真课程设计
生产系统建模与及仿真实验报告
系统建模与仿真
系统建模与仿真实验报告
系统建模与仿真项目驱动设计报告
MATLAB Simulink系统建模与仿真 实验报告
机械系统建模与仿真方法1
电力系统建模及仿真课程设计
制造系统建模与仿真知识点2
《生产物流系统建模和仿真》课程设计报告
制造系统建模与仿真学习心得学习资料
系统建模与仿真设计报告一
雷达系统建模与仿真报告模板.doc
系统建模与仿真-哈尔滨工业大学
生产系统建模与仿真课程设计
单服务台排队系统建模与仿真研究报告
系统建模与仿真
生产系统建模与仿真课程设计
哈工大工程系统建模与仿真实验报告
相关主题
文本预览