Subject: Differences between Modbus and Memobus
Further Documentation:
This document describes the difference between Memobus and Modbus. For additional detailed information, please refer to the following documents:
?SIE-C815-13.60E “Memobus Descriptive Information”
?SIEZ-C887-1.2 “Machine Controller MP9xx Ladder Programming Users Manual” Memobus Basics:
When communicating with an MP9xx series controller and an HMI, the HMI should be the master, and the MP9xx should be the slave. Up to 63 slaves can be addressed using Memobus. The DEFAULT HMI Driver protocol settings are as follows:
Transmission rate: 19.2 kbps
Transmission mode: RTU (Remote Terminal Unit)
Data: 8 bits
Parity Check: Even parity
Stop bit: 1 bit
Error Check: CRC-16 (Cyclic Redundancy Check)
Transmission: Half duplex, asynchronous
MP9xx Port: port #2
Slave Address: 1
The MP9xx controller will use a message receive function called “MSG-RCV” in slave mode. This function accepts standard Modbus function codes in its messaging format. Note that physical hardware outputs are not supported by the Memobus protocol. This is for safety and to avoid conflicts due to unplanned writing of direct control outputs between the HMI and MP9xx ladder program.
Yaskawa Electric America - 2121 Norman Drive South – Waukegan IL 60085
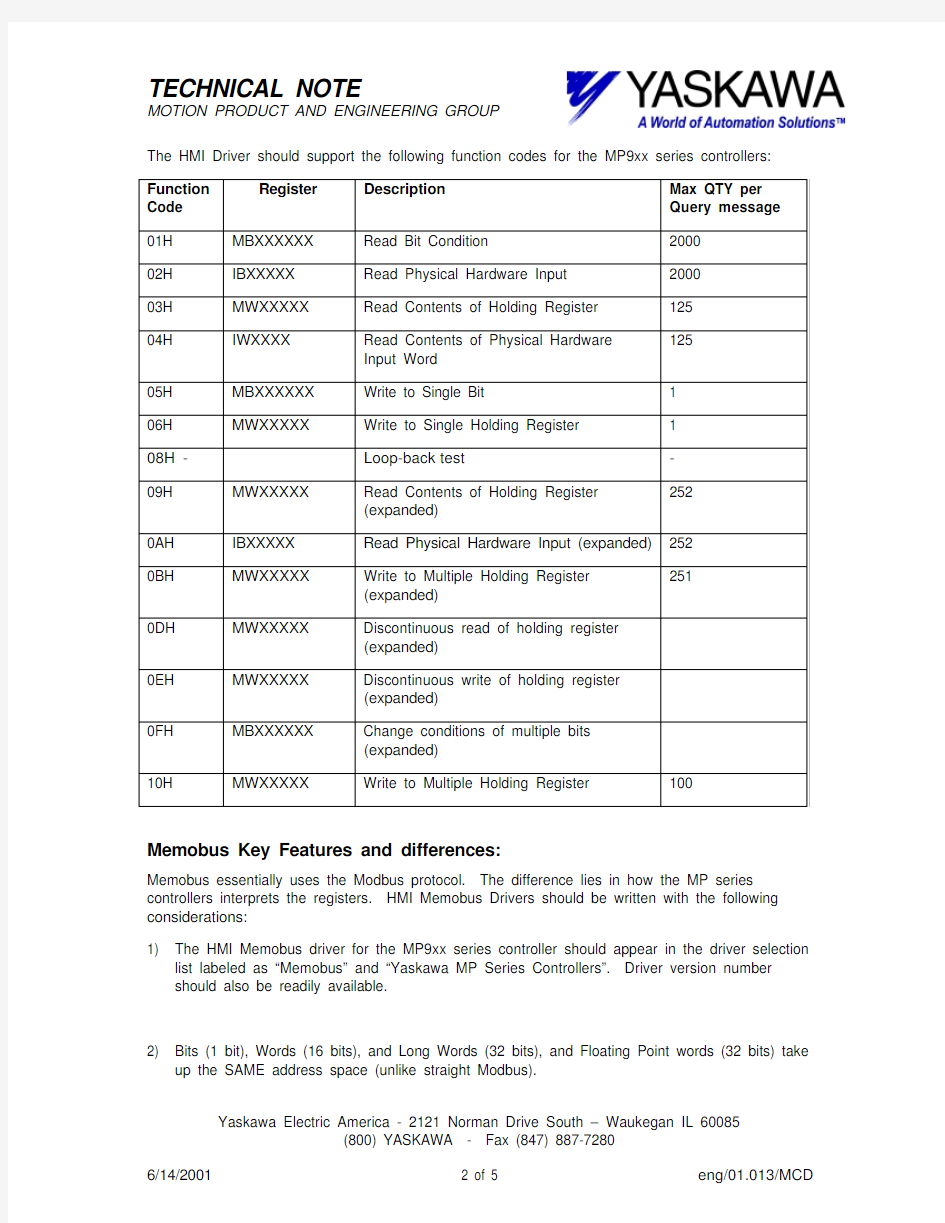
The HMI Driver should support the following function codes for the MP9xx series controllers:
Function Code Register Description Max QTY per
Query message
01H MBXXXXXX Read Bit Condition 2000
02H IBXXXXX Read Physical Hardware Input 2000
03H MWXXXXX Read Contents of Holding Register 125
04H IWXXXX Read Contents of Physical Hardware
Input Word
125
05H MBXXXXXX Write to Single Bit 1
06H MWXXXXX Write to Single Holding Register 1
08H - Loop-back
test -
09H MWXXXXX Read Contents of Holding Register
(expanded)
252
0AH IBXXXXX Read Physical Hardware Input (expanded)252
0BH MWXXXXX Write to Multiple Holding Register
(expanded)
251
0DH MWXXXXX Discontinuous read of holding register
(expanded)
0EH MWXXXXX Discontinuous write of holding register
(expanded)
0FH MBXXXXXX Change conditions of multiple bits
(expanded)
10H MWXXXXX Write to Multiple Holding Register 100
Memobus Key Features and differences:
Memobus essentially uses the Modbus protocol. The difference lies in how the MP series controllers interprets the registers. HMI Memobus Drivers should be written with the following considerations:
1) The HMI Memobus driver for the MP9xx series controller should appear in the driver selection
list labeled as “Memobus” and “Yaskawa MP Series Controllers”. Driver version number should also be readily available.
2) Bits (1 bit), Words (16 bits), and Long Words (32 bits), and Floating Point words (32 bits) take
up the SAME address space (unlike straight Modbus).
Yaskawa Electric America - 2121 Norman Drive South – Waukegan IL 60085
Example: MB000001=1 is same as MW00000=1 is same as ML00000=1. This means that
0XXXX coils, 1XXXX input relays, and 3XXXX input registers do not exist.
3) Register numbers are to be mapped directly (no offset).
Example:
Memobus Modbus
MW00000 = 40001
MW00040 = 40041
4) All bits are to be set up in reverse order, and expressed in hex.
Address range: MB000000 to MB32767F
Value range: on or off (example MB00000F=1 and MB00000F=0)
For example, MB000300 is register MW00030 bit 0 in the MP9**.
MP9** bit 0 = Modbus bit XXXXX.16
MP9** bit F = Modbus bit XXXXX.1 (Note: bit 15 is set up in the MP9** as hex bit F )
Example:
Bit numbers in MP9** register = 0 1 2 3 4 5 6 7 8 9 A B C D E F Bit numbers in the Modbus tag= 16 15 14 13 12 11 10 9 8 7 6 5 4 3 2 1
The Memobus protocol supports individual bit read/write only from address 0 to 4095. Above that address, a bit write to the MP controller requires the HMI driver to (1) read the word which the bit is stored in, (2) mask and set that bit, and (3) rewrite that word to the MP controller.
This sets up a danger of the HMI and the MP controller becoming out of sync and possibly
over-writing if certain precautions are not taken. Programmers must consider this when
assigning bits for read/write usage between the MP9xx and the HMI. It is important to
organize all bits within a 16-bit word to be either a read or a write function only.
5) Word holding registers consist of 16 bits (two bytes) and are written directly. Address is
expressed in decimal.
Address range: MW00000 to MW32767, Value range: -32768 to +32767
See chart below:
Long words consist of 32 bits (two words), high and low words are to be swapped. Address is expressed in decimal.
Address range: ML00000 to ML32766, Value range: -2147483648 to +2147483647 Yaskawa Electric America - 2121 Norman Drive South – Waukegan IL 60085
Example for MP930:
ML00100 consists of MW00100 (low word) and MW00101 (high word)
See chart below:
6) Floating point words are 32 bits and are in Intel 486 Single precision format (IEEE Floating
Point). The address is expressed in decimal.
Address range: MF00000 to MF32766, Value range: +/- (1.175E-38 to 3.402E+38),0
Intel 486 single precision format: Bit 31=sign, bit 23-30 is biased exponent, bit 0-22 is
significant.
All MP Series products round to display real numbers (floating point) to display 7 digits (if the 8th digit is 5 or greater, then the 7 digit is rounded up).
7) Input registers are accessible for direct monitoring at the HMI. IB, IW, IF. Address is
expressed in hex.
Address range (MP940): IW0000 to IW07FF (2048 decimal)
Address range (MP930): IW0000 to IW0FFF (4096 decimal) – Use this as the maximum value.
8) Output registers (physical output points) are not accessible in Memobus.
Yaskawa Electric America - 2121 Norman Drive South – Waukegan IL 60085
9) Field entries in HMI should be auto-configurable when the data type is detected after user
entry.
Data type Default # digits Default Display
Bit Bit 1
Word 6 Signed 16-Bit
Long word 11 Signed 32-Bit
Floating point word (real) 11 Floating point with exponent
Yaskawa Electric America - 2121 Norman Drive South – Waukegan IL 60085
动态人脸识别巡更系统 设 计 方 案 北京博睿视科技有限责任公司 2017年8月18日
目录 第一章人脸识别巡更系统设计要求 一、人脸识别巡更系统社会意义 略 第二章系统概述 人脸识别智能巡更系统为基于深度学习算法的通过式人脸记录巡检系统。根据需要将用于人脸抓拍的监控摄像机安装在需要巡逻的线路或执勤岗位上,人员对该地进行巡更通过时摄像机自动抓拍巡更人员的人脸照片同时将抓拍时间与对应的巡更人员人脸库进行比对结果通过局域网存入系统数据库。此记录将成为巡更人员何时到达该地巡更的依据。管理人员通过系统管理系统软件可清晰地了查询巡更人员巡更的实际情况,如漏查、误点、非本人带班等信息,方便管理人员有效管理。 1、人脸识别巡更系统构成 该系统由人脸静态建库、人脸动态入库、人脸信息修改、实时人脸抓拍、人脸检索、人脸图像聚类、以图搜图、联动报警八大部分组成。整个软件的逻辑体系结构如下图所示。 软件结构体系(C/S结构)
图3-3 软件逻辑体系示意图 3.3.1、人脸静态建库 实现布控人员建库,提供用户建立临时人脸库的功能,使用者可自行注册,批量导入人脸照片,静态人脸库包括黑名单、白名单。 图3.3.1人脸静态建库 3.3.2、人脸动态入库 将摄像机抓拍的人脸图片,建立动态抓拍人脸库,不断累积抓拍数据,为后 期进行人脸管理和提升识别率提供必要的支撑。
图3.3.2人脸动态入库 3.3.3、人脸信息修改 人脸信息修改模块主要是针对各个不同的人脸库,查询符合条件下的人员信息,并对其 中的信息进行修改删除等操作,同时也可针对选择的人脸库进行新人员信息的注册。 图3.3.3人脸信息修改
profibus DP 总线profibus PA 总线modbus总线的区别 PROFBUS是一种国际性的开放式的现场总线标准,它既可以用于高速并且对于时间苛求的数据传输,也可以用于大范围的复杂通讯场合。 PROFBUS-DP是一种通讯协议,这种为高速传输用户数据而优化的PROFBUS协议特别适用于可编程控制器与现场级分散的I/O设备之间的通讯。 PROFIBUS-DP用于现场层的高速数据传送。主站周期地读取从站的输入信息并周期地向从站发送输出信息。总线循环时间必须要比主站(PLC)程序循环时间短。除周期性用户数据传输外,PROFIBUS-DP还提供智能化设备所需的非周期性通信以进行组态.诊断和报警处理。 传输技术:RS-485双绞线.双线电缆或光缆。波特率从9.6Kbit/s到12Mbit。 PROFIBUS-PA适用于PROFIBUS 的过程自动化。PA将自动化系统和过程控制系统与压力、湿度和液位变送器等现场设备连接起来,PA可用来替代4-20mA的模拟技术。PROFIBUS-PA具有如下特性: 1.适合过程自动化应用的行规使不同厂家生产的现场设备具有互换性。 2.增加和去除总线站点,即使在本征安全地区也不会影响到其它站。 3.在过程自动化的PROFIBUS-PA段与制造业自动化的PROFIBUS-DP总线段之间通过藕合器 连接,并使可实现两段间的透明通信。 4.使用与IEC1158-2技术相同的双绞线完成远程供电和数据传送。 5.在潜在的爆炸危险区可使用防爆型“本征安全”或“非本征安全”。 1、PROFIBUS-PA传输协议 PROFIBUS-PA采用PROFIBUS-DP的基本功能来传送测量值和状态。并用扩展的PROFIBUS-DP 功能来制订制现场设备的参数和进行设备操作。PROFIBUS-PA第一层采用IEC1158-2技术,第二层和第一层之间的在DIN19245系列标准的第四部分作了规定。 2、PROFIBUS-PA设备行规 PROFIBUS-PA行规保证了不同厂商所生产的现场设备的互换性和互操作性,它是PROFIBUS-PA 的一个组成部分。PA行规的任务是选用各种类型现场设备真正需要通信的功能,并提供这些设备功能和设备行为的一切必要规格。 目前,PA行规已对所有通用的测量变送器和其它选择的一些设备类型作了具体规定,这些设备如: (1)测压力.液位.温度和流量的变送器 (2)数字量输入和输出 (3)模拟量输入和输出 (4)阀门 (5)定位器
IDOC IDoc是 SAP 提供系统集成专用的数据/消息格式。它几乎可以传送任何 SAP 应用数据。IDocs以文本字符为基础,因而编制方便。IDocs中的信息从记录类型上分为控制记录、数据记录和状态记录3种。控制纪录主要是文本信息,如IDoc, 类型、发送/接收方信息以及文本标识;数据纪录为管理和实际数据部分;状态纪录用来追踪文本传递各点的状态,如状态码、系统时间、错误标识等。 功能:向外部系统发送数据从外部接收数据。 创建IDOC: 第一步:WE31 创建IDOC所包含的字段. 第二步:WE30 创建IDOC 把Segment分配给IDOC 第三步:WE81 创建信息类型 第四步:WE82 把IDOC类型与信息类型对应. 第五步:WE57 Assign Message & Idoc Type to a Function Module for Data Process 第六步:SM59 Define a RFC connection for Idoc transfer 第七步:WE21 Define a Port ( Assign a RFC destination which created in SM59 ) 第八步:WE41/42 Creat Process Code 第九步:WE20 Define a Partner Profiles( Also creat a Outbound parameters with Port, or Inbound parameters with Process code ) 管理IDOC: WE02 显示IDOC,可以根据时间,IDOC类型查找IDOC,查看成功,出错信息。 WE46 IDOC管理(出\入) WE60 IDOC类型文档(可以查看IDOC结构,和每个字段的描述. WE19 根据IDOC号进行IDOC处理,可以修改IDOC值进行补发动作,处理分为内向和外向。 消息配置: WE20 配置伙伴消息进和出IDOC类型 WE21 配置伙伴, BAPI和RFC和ALE和EXIT的区别 BAPI和RFC不是同一个层次上概念,不能说从字面上看到BAPI函数和RFC函数就认为他们之间有必然的联系和区别。打个比如,问一个问题:人可以分为哪几类,答曰:男人和老人,呵~~,大家都知道,男人是基于性别来说的,老人是基于年龄的。BAPI是SAP提供
智能人脸识别系统技术方案
目录 1智能人像比对平台 1.1系统结构 建立标准统一的共享人像库,并在此基础上,部署完整的人像比对判定平台。该系统由人像标准化采集系统,人像数据库子系统、基础比对服务平台、人脸识别应用平台4大部分组成,支持前端人像采集、静态人脸查询、移动警务通人脸识别一体化服务。 该平台支持统一人像数据交换接口,兼容大多数人像数据交换标准。统一的安全标准接口,兼容PKI密钥,网络加密狗等常见的安全标准接口。系统总体结构如下: 系统采用B/S架构,以浏览器方式进行人像预处理、人像比对、结果查询、用户管理、系统运行状态查询等管理操作,减少了系统后台管理、人口治安及其他警种成百上千终端安装和维护难度,方便未来多警种共享应用。系统可提供标准的WebService接口,将业务系统获取的人像照片与相关人像库进行比对。 1.2设计原则 本着统一标准、分级管理、资源共享、无缝对接的设计原则,以人像比对算法为核心,整合多区域现有资源,实现准确识别、快速反映,覆盖全面的智能人像识别应用平台。 1.2.1先进性 该平台算法由中国科学院自动化研究所研究员、国际知名人脸识别专家、IEEE院士李子青教授领衔研发,是基于中国自主知识产权,针对公安各警种业务特点专门研发的综合智能人像识别应用系统平台。
1.2.2开放性 人像采集与比对平台具有统一的服务接口,兼容公安部拟指定的统一人像数据交换标准草案。统一的安全验证,兼容PKI密钥,身份认证等常见的安全验证机制。 1.2.3扩展性 整个平台系统接口分为系统级别之间的接口与单个系统开放出来的服务接口组成。系统可“随需而变,以不变应万变”提供多种可靠服务功能。 1、系统级接口 系统级接口指的是不同地区部署的人像辅助识别平台之间的接口,主要有两种访问方式第一种采用页面查询的方式,以只查询方式进行访问,通过系统提供的Guest权限进行页面访问。适用于不同平台之间快速的调阅查询。第二种通过请求服务与直接调阅的形式进行数据库的查询,系统预留标准数据库查询接口,以市,县二层结构进行数据库间的查询调用,采用本系统建立的数据中心,纵向上进行直接的调用,高层中心保留下级中心的数据库信息索引。即市级中心直接查询市级与县级中心,市级中心直接查询县级中心。横向上以请求服务形式进行调用,横向系统间不保留对方的数据库信息索引,而是通过请求服务方式进行。 2、服务接口 服务接口适用于该系统与其他业务应用系统做二次开发或者集成用接口,包括所有系统级接口与平台应用接口。 人像基础比对服务平台通过WebService进行与其他系统的交换机制,通过标准的XML或者Jason格式文件进行数据交换,兼容《GA/T 922.2-2011标准第二部分人像数据采集标准》中的数据格式交换。 服务接口主要以WebService与ActiveX等方式提供。满足各业务系统二次开发,集成使用。 服务接口说明
一、一、填空题(25分) 1、1、工业生产对过程装备的基本要求是()、()和() 等。 2、2、压差式流量计的核心部件是(),常见的节流装置有()、 ()和()等。 3、3、液位是指(),常用的液位计有()、()、()等。 4、4、在PID调节器中,需要整定的参数为()、()和()。 5、5、调节阀的选型主要包括()、()、()和()等 内容。 6、6、计算机在过程控制中的应用类型一般可分为()、()、 ()、()等几种类型。 7、7、PLC的程序表达方式常采用()、()和()等方法。 二、二、判断改正题(10分) 1、1、一单纯比例控制的液位对象,只要比例度选择的合适,系统就能跟踪 并最终稳定到设定值。( ) 2、2、自动调节系统中,滞后的存在总不利于调节的。() 3、3、时间常数越大,表示对象受干扰作用后,到达新稳态值所需的时间越 短。() 4、4、控制系统中直接产生控制作用的是控制信号。() 5、5、串联管路中,随S值下降,调节阀的等百分比流量特性畸变趋近于直 线特性。 三、三、简答题(20分) 1、1、何为调节器参数的工程整定法,并简述临界比例度法进行参数整定的 过程。 2、2、试简要分析计算机控制系统与常规模拟控制系统的异同点。 3、3、试简要分析本质安全防爆系统的防爆原理。 4、4、何为单容液位对象的自衡作用,并简要分析产生自衡作用的原因。 四、四、分析计算题(45分) 1、1、如图为一简单水槽液位控制系统,要求:(10分) (1)(1)画出本控制系统方框图。 (2)(2)系统被控变量、控制变量和检测变送环节各是什么? (3)(3)系统调节机构的输入、输出量各是什么,属哪种调节规律,并推导出调节规律的数学表达式。
{ APP接口规文档}手机客户端接口文档
版本历史
目录 一、概述 (1) 1.1 有关接口 (1) 1.1.1接口是纯数据的交互 (1) 1.2 接口的分类 (1) 1.2.1查询类接口 (1) 1.2.2 操作类接口 (1) 1.2.3上传下载类接口 (1) 1.2.4推送类接口 (1) 二、查询类接口格式规 (1) 2.1获取单条对象信息 (1) 2.1.1 请求格式 (1) 2.1.2参数说明 (2) 2.1.3正常返回结果 (2) 2.2获取列表对象信息 (3) 2.2.1 请求格式 (3) 2.2.2参数说明 (3) 2.2.3正常返回结果 (3) 三、操作类接口 (4) 3.1 新增操作 (4) 3.1.1接口说明 (4) 3.1.2参数说明 (4) 3.1.3正常返回结果 (4) 3.1.4错误返回列表 (5) 3.2 修改操作 (5) 3.2.1接口说明 (5) 3.2.2参数说明 (5) 3.2.3正常返回结果 (5) 3.2.4错误返回列表 (5) 3.3 删除操作 (6) 3.3.1接口说明 (6) 3.3.2参数说明 (6) 3.3.3正常返回结果 (6) 3.3.4错误返回列表 (6) 四、上传下载类 (7) 4.1 上传文件 (7) 4.1.1接口说明 (7) 4.1.2参数说明 (7) 4.1.3正常返回结果 (7) 4.1.4错误返回列表 (7) 4.2 下载文件 (7) 4.2.1接口说明 (7)
4.2.2参数说明 (8) 4.2.3正常返回结果 (8) 4.2.4错误返回列表 (8) 五、推送类接口 (8) 5.1 推送消息 (8) 5.1.1接口说明 (8) 5.1.2参数说明 (8) 5.1.3正常返回结果 (9) 5.1.4错误返回列表 (9) 六、通用返回格式 (9) 6.1 正确返回 (9) 6.1.1接口说明 (9) 6.1.2参数说明 (9) 6.1.3正常返回结果 (9) 6.1.4错误返回列表 (10) 6.2 错误返回 (10) 6.2.1接口说明 (10) 6.2.2参数说明 (10) 6.2.3正常返回结果 (10) 6.2.4错误返回列表 (10) 七、附录 (11) 7.1 通用错误返回列表 (11) 7.2 URL地址信息 (11) 7.2.1 主机地址 (11) 7.2.2 URL列表 (11) 7.3 安全机制 (11) 7.3.1 验证签名机制 (11) 7.4 其他 (12) 7.2.1 列表数据为空的返回 (12)
过程装备控制技术及应用试题 一、选择题(每题2分,共20分) 1、闭环控制系统是根据信号进行控制的。 A、被控量 B、偏差 C、扰动 D、给定值 2、 DDZ-皿型仪表采用国际标准信号,现场传输信号是(4?20mADC ),控制联络信号为1?5VDC。 (A)0 ?10mADC ; (B)4 ?20mADC ; (C)1 ?5VDC ; (D)1 ?10VDC。 3、对于PID调节器(I的作用是消除静态偏差、D的作用是减小动态偏差)。 (A)I的作用是减小动态偏差、D的作用是消除静态偏差;(B)l的作用是消除静态偏差、D的作用是消除动态偏差;(C)l的作用是消除动态偏差、D的作用是减小静态偏差;(D)l的作用是消除静态偏差、D的作用是减小动态偏差。 4、因为(微分动作)对于干扰的反应是很灵敏的。因此,它常用于温度的调节,一般不能用于压力、流量、液位的调节。 (A)比例动作;(B)积分动作;(C)微分动作;(D)比例积分。 5、调节系统中用临界比例带法整定参数的具体方法是(先将Ti置最大,TD置最小,SP置较大)。 (A)先将Ti置最大,TD置最小,SP置较大;(B)先将Ti置最小,TD置最大,SP置较大;(C)先将Ti置最小,TD 置最小,SP置较小;(D)先将Ti置最小,TD置最小,SP置较大。 6、调节对象在动态特性测试中,应用最多的一种典型输入信号是(阶跃函数)。 (A)阶跃函数;(B)加速度函数;(C)正弦函数;(D)指数函数。 7、霍尔压力变送器是利用霍尔效应把压力作用下的弹性元件位移信号转换成(电动势)信号,来反应压力的变化。 (A)电流;(B)相位;(C)电动势;(D)以上都是 8、要使PID调节器为比例规律,其积分时间Ti和微分时间TD应设置为(^、0 )。 (A)g 汽(B)g 0 ;(C)0、0;(D)0、g 9、动态偏差是指调节过程中(被调量与给定值)之间的最大偏差。 (A)被调量与调节量;(B)调节量与给定值;(C)被调量与给定值;(D)以上都不是 10、需要知道对象的动态特性,才能进行参数整定的工程方法是____________ 。 A、临界比例带法 B、衰减曲线法 C、响应曲线法 D、广义频率法 二、填空题(每空2分,共30分) 1、工业生产对过程装备的基本要求是________________ 、_____________ 、__________ (安全性;经济性;稳定 性)等 2、在阶跃干扰作用下,自动控制系统的过度过程有哪几种基本形 式_____________ 、_____________ 、__________ 、 __________ 。①发散振荡过程② 等幅振荡过程③衰减 振荡过程④非振荡的单调过程
modbus RTU常见问题汇总 1、ModBus RTU通讯协议与ModBus通讯协议有什么区别? ModBus协议是应用层报文传输协议(OSI模型第7层),它定义了一个与通信层无关的协议数据单元(PDU),即PDU=功能码+数据域。 ModBus协议能够应用在不同类型的总线或网络。对应不同的总线或网络,Modbus协议引入一些附加域映射成应用数据单元(ADU),即ADU=附加域+PDU。目前,Modbus有下列三种通信方式: 1.以太网,对应的通信模式是MODBUS TCP。 2.异步串行传输(各种介质如有线RS-232-/422/485/;光纤、无线等),对应的通信模式是MO DBUS RT U 或MODBUS ASCII。 3.高速令牌传递网络,对应的通信模式是Modbus PLUS。 2、关于MODBUS RTU通讯协议的提问? modbus 主要由站地址(一个字节)+功能码(一个字节)+首地址(两个字节)+访问字数(两个字节)+校验码(CRC16或LRC两个字节)总共8个字节组成。其实VB中编程很简单从组建添加MSComm组建就行了,难的是校验, 3、modbus、rtu、modbus rtu分别是什么? modbus协议是工控行业的标准协议,前身为莫迪康所写,现已被施奈德收购 而modbus分为两种协议:即串口协议(modbus rtu)和网口协议(modbus tcp)协议,一般的工控机只支持rs232或者RS485的串口模式,这个时候工控机的协议栈里就只有modbusRTU协议,当他从串口接收到数据时,会直接根据报文中的数据进行控制,如果需要用modbusTCP协议进行传输,则需要使用带有网口的PLC 具体的帧格式如下 modbus RTU 地址域功能码数据差错校验 modbus TCP 目的地址协议id 长度单元号功能码数据 简单的说tcp是由RTU加工而来的 而RTU则是另外一种概念,不包含在modbus协议内 是工控行业对监控设备的简称。 4、关于modbus_RTU协议主机发送的命令的一些问题 ?01 读保持线圈状态(Read coil status) ?02 读输入线圈状态(Read input status) ?03 读保持寄存器(Read holding register) ?04 读输入寄存器(Read input register) ?05 写单个线圈(Force single coil) ?06 写单个寄存器(Preset single register) ?15 写多个线圈(Force multiple coils) ?16 写多个寄存器(Preset multiple registers) 这些都是什么意思
工业通信协议Modbus,Profibus-DP,Devicenet和Ethernet 工业通信协议Modbus,Profibus-DP,Devicenet和Ethernet 目前在工业领域使用较为广泛的RS485接口,很多支持Modbus,Profibus-DP,Devicenet 和Ethernet这几种协议;不知道大家是否对这些协议有没有研究,小弟愿意与你一起切磋切磋! 还有那个4-20mA,支持HART协议方面的! 谢谢,互助合作,相互提高! 通信协议 所谓通信协议是指通信双方的一种约定。约定包括对数据格式、同步方式、传送速度、传送步骤、检纠错方式以及控制字符定义等问题做出统一规定,通信双方必须共同遵守。因此,也叫做通信控制规程,或称传输控制规程,它属于ISO'S OSI七层参考模型中的数据链路层。 目前,采用的通信协议有两类:异步协议和同步协议。同步协议又有面向字符和面向比特以及面向字节计数三种。其中,面向字节计数的同步协议主要用于DEC 公司的网络体系结构中。 一、物理接口标准 1.串行通信接口的基本任务 (1)实现数据格式化:因为来自CPU的是普通的并行数据,所以,接口电路应具有实现不同串行通信方式下的数据格式化的任务。在异步通信方式下,接口自动生成起止式的帧数据格式。在面向字符的同步方式下,接口要在待传送的数据块前加上同步字符。 (2)进行串-并转换:串行传送,数据是一位一位串行传送的,而计算机处理数据是并行数据。所以当数据由计算机送至数据发送器时,首先把串行数据转换为并行数才能送入计算机处理。因此串并转换是串行接口电路的重要任务。 (3)控制数据传输速率:串行通信接口电路应具有对数据传输速率——波特率进行选择和控制的能力。 (4)进行错误检测:在发送时接口电路对传送的字符数据自动生成奇偶校验位或其他校验码。在接收时,接口电路检查字符的奇偶校验或其他校验码,确定是否发生传送错误。
竭诚为您提供优质文档/双击可除java开发接口文档模板 篇一:java的接口与实例 一、定义 java接口(interface),是一系列方法的声明,是一些方法特征的集合,一个接口只有方法的特征没有方法的实现,因此这些方法可以在不同的地方被不同的类实现,而这些实现可以具有不同的行为(功能)。 接口定义的一般形式为: [访问控制符]interface{ 类型标识符final符号常量名n=常数; 返回值类型方法名([参数列表]); … } 二、接口的特点 1、java接口中的成员变量默认都是 public,static,final类型的(都可省略),必须被显示初始化,即接口中的成员变量为常量(大写,单词之间用"_"分隔) 2、java接口中的方法默认都是public,abstract类型
的(都可省略),没有方法体,不能被实例化 3、java接口中只能包含public,static,final类型的成员变量和public,abstract类型的成员方法 4、接口中没有构造方法,不能被实例化 5、一个接口不能实现(implements)另一个接口,但它可以继承多个其它的接口 6、java接口必须通过类来实现它的抽象方法 7、当类实现了某个java接口时,它必须实现接口中的所有抽象方法,否则这个类必须声明为抽象类 8、不允许创建接口的实例(实例化),但允许定义接口类型的引用变量,该引用变量引用实现了这个接口的类的实例 9、一个类只能继承一个直接的父类,但可以实现多个接口,间接的实现了多继承. 三、接口的用法 1、精简程序结构,免除重复定义 比如,有两个及上的的类拥有相同的方法,但是实现功能不一样,就可以定义一个接口,将这个方法提炼出来,在需要使用该方法的类中去实现,就免除了多个类定义系统方法的麻烦。举例:鸟类和昆虫类都具有飞行的功能,这个功能是相同的,但是其它功能是不同的,在程序实现的过程中,就可以定义一个接口,专门描述飞行。 下图是分别定义鸟类和昆虫类,其都有飞行的方法。
动态人脸识别巡更系统 案 北京博睿视科技有限责任公司 2017年8月 18日 目录 第一章人脸识别巡更系统设计要求 一、人脸识别巡更系统社会意义 略 第二章系统概述 人脸识别智能巡更系统为基于深度学习算法的通过式人脸记录巡检系统。根据需要将用于人脸抓拍的监控摄像机安装在需要巡逻的线路或执勤岗位上,人员对该地进行巡更通过时摄像机自动抓拍巡更人员的人脸照片同时将抓拍时间与对应的巡更人员人脸库进行比对结果通过局域网存入系统数据库。此记录将成为巡更人员何时到达该地巡更的依据。管理人员通过系统管理系统软件可清晰地了
查询巡更人员巡更的实际情况,如漏查、误点、非本人带班等信息,方便管理人员有效管理。 1、人脸识别巡更系统构成 该系统由人脸静态建库、人脸动态入库、人脸信息修改、实时人脸抓拍、人脸检索、人脸图像聚类、以图搜图、联动报警八大部分组成。整个软件的逻辑体系结构如下图所示。 软件结构体系( C/S 结构) 图3-3 软件逻辑体系示意图 实现布控人员建库,提供用户建立临时人脸库的功能,使用者可自行注册,批量导入人脸照片,静态人脸库包括黑名单、白名单。 人脸动态入库 将摄像机抓拍的人脸图片,建立动态抓拍人脸库,不断累积抓拍数据,为后 期进行人脸管理和提升识别率提供必要的支撑。 人脸信息修改 人脸信息修改模块主要是针对各个不同的人脸库,查询符合条件下的人员信息,并对其 中的信息进行修改删除等操作,同时也可针对选择的人脸库进行新人员信息的注册。
实时人脸抓拍 该子系统为监控画面和报警端的界面,主要分为4 个部分:视频设备列表,监控画面,现场抓拍图像和匹配报警图像。 图实时人脸监控子系统效果图 功能模块分别为 视频设备列表:列举所有可以使用的监控摄像头 图视频设备列表 监控画面:播放窗口显示该摄像机的实时监控 图监控画面 现场抓拍图像:显示摄像头所抓取的人脸图片 图现场抓拍图像 报警图像:根据抓拍到的人脸图像,与数据库中的人员进行比对查询。 图匹配报警图像 人脸图像检索 人脸图像检索即为对摄像头抓拍到的人员信息或系统识别比对结果进行进一步的查询。该模块分为比对结果查询,抓拍人像查询和比对库人脸查询三个部分 比对结果查询:选择要查询的设备和黑白名单类型以及匹配的开始和结束时间,然后点击查询按钮。 显示的匹配结果以倒序方式进行排列,离结束时间最近的排在最 图比对结果查询 抓拍人像查询:选择抓拍起始时间和抓拍结束时间,然后点击查询按钮。显示的内容以“抓拍时 间”中的内容倒序方式进行排列,即离结束时间最近的排在最前面。 图抓拍人像查询比对库人脸查询:选择入库的开始时间和入库结束时间,然后点击查询按钮。显示的结果以“入库时间”中的内容倒序方式进行排列,即离结束时间最近的排在最前面。 图比对库人脸查询 聚类
1. 过程装备的三项基本要求过程装备的三项基本要求:安全性、经济性和稳定性. A.安全性:指整个生产过程中确保人身和设备的安全 B.经济性:指在生产同样质量和数量产品所消耗的能量和原材料最少,也就是要求生产成本低而效率高 C.稳定性:指系统应具有抵抗外部干扰,保持生产过程长期稳定运行的能力. 2. 过程装备控制的主要参数:温度、压力、流量、液位(或物位)、成分和物性等. 3. 流程工业四大参数:温度、压力、流量、液位(或物位) 4. 控制系统的组成控制系统的组成:(1)被控对象 (2)测量元件和变送器 (3)调节器 (4)执行器 5. 控制系统各参量及其作用:1.被控变量 y 指需要控制的工艺参数,它是被控对象的输出信号 2.给定值(或设定值) ys 对应于生产过程中被控变量的期望值 3.测量值 ym 由检测元件得到的被控变量的实际值 4.操纵变量(或控制变量)m 受控于调节阀,用以克服干扰影响,具体实现控制作用的变量称为操纵变量,它是调节阀的输出信号 5.干扰(或外界扰动)f 引起被控变量偏离给定值的,除操纵变量以外的各种因素 6.偏差信号 e 在理论上应该是被控变量的实际值与给定值之差 7.控制信号u 控制器将偏差按一定规律计算得到的量。 6. 控制系统的分类(1)控制系统的分类:按给定值 a 定值控制系统;随动控制系统;程序控制系统(2) b c 按输出信号的影响 a 闭环控制;b 开环控制(3)按系统克服干扰的方式 a 反馈控制系统;b 前馈控制系统;c 前馈-反馈控制系统 7. 控制系统过度过程定义:从被控对象受到干扰作用使被控变量偏离给定值时起,调节器开始发挥作用,使被控变量回复到给定值附近范围内,然而这一回复并不是瞬间完成的,而是要经历一个过程,这个过程就是控制系统的过渡过程。 8. 阶跃干扰下过渡过程的基本形式及其使用特点(1)发散振荡过程:这是一种不稳定的阶跃干扰下过渡过程的基本形式及其使用特点:过渡过程,因此要尽量避免(2)等幅振荡过程:被控变量在某稳定值附近振荡,而振荡幅度恒定不变,这意味着系统在受到阶跃干扰作用后,就不能再稳定下来,一般不采用(3)衰减振荡过程:被控变量在稳定值附近上下波动,经过两三个周期就稳定下来,这是一种稳定的过渡过程(4)非振荡的过渡过程:是一个稳定的过渡过程,但与衰减振荡相比,其回复到平衡状态的速度慢,时间长,一般不采用。 9. 评价控制系统的性能指标(1)以阶跃响应曲线形式表示的质量指标: A.最大偏差 A(或评价控制系统的性能指标:超调量σ) B.衰减比 n C. 过渡时间 ts D.余差 e E.振荡周期 T (2)偏差积分性能指标: A.平方误差积分指标(ISE) B.时间乘平方误差积分指标(ITSE)C.绝对误差积分指标(IAE) D.时间乘绝对误差积分指标(ITAE) 10. 被控对象特性的定义被控对象特性的定义:就是当被控对象的输入变量发生变化时,其输出变量随时间的变化规律(包括变化的大小,速度等)。 11. 连续生产过程所遵守的两个最基本的关系:物料平衡和能量平衡。即静态条件下,单位时间流入对象的物料(或能量)等于从系统中流出的物料(或能量);动态条件下,单位时间流入对象的物料(或能量)与从系统中流出的物料(或能量)之差等于系统内物料(或能量)存储量的变化率。 12. 有自衡作用和无自衡作用单容液位对象的区别有自衡作用和无自衡作用单容液位对象的区别:A.自衡特性有利于控制,在某些情况下,使用简单的控制系统就能得到良好的控制质量,甚至有时可以不用设置控制系统。B.无自衡特性被控对象在受到扰动作用后不能重新恢复平衡,因此控制要求较高。对这类被控对象除必须施加控制外,还常常设有自动报警系统。 13. 一阶被控对象一阶被控对象:它是一个一阶常系数微分方程,具有该特性的被控对象叫一阶被控对象. 14. 描述被控对象特性的参数及其对对象控制质量的影响(1)放大系数 K 对控制通道,K 描述被控对象特性的参数及其对对象控制质量的影响:值大,控制灵敏,但被控变量不易控制,系统不稳定;对干扰通道,K 值越小,相同干扰产生的作用越小,利于控制。(2)时间常数 T 不同通道,时间常数对系统的影响:对控制通道,若时间常数 T 大,则被控变量的变化比较缓和,一般来讲,这种对象比较稳定,容易控制,但缺点是控制过于缓慢;若时间常数 T 小,则被控变量的速度变化快,不易控制。因此,时间常数太大或太小,对过程控制都不利;对干扰通道,时间常数大有明显的好处,使干扰对系统的影响变得比较缓和,被控变量的变化平稳,对象容易控制。(3)滞后时间不同通道、不同滞后对控制性能的影响:对控制通道,滞后的存在不利于控制;对于干扰通道,作用不一,纯滞后是只是推迟了干扰作用的时间,因此对控制质量没有影响;容量滞后则可以缓和干扰对被控对象的影响,因而对控制系统是有利的。 15. 单回路控制系统参数选择的原则(1)被控变量的选择基本原则;被控变量信号最好是单回路控制系统参数选择的原则:能够直接测量获得,并且测量和变送环节的滞后也要比较小。若被控变量信号无法直接获取,可选择与之有单值函数关系的间接参数作为被控变量。被控变量必须是独立变量。变量的数目一般可以用物理化学中的相律关系来确定。被控变量必须考虑工艺合理性,以及目前仪表的现状能否满足要求。(2)操纵变量的选择;使被控对象控制通道的放大系数较大,时间常数较小,纯滞后时间越小越好;使被控对象干扰通道的放大系数尽可能小,时间常数越大越好。(3)检测变送环节:检测变送环节在控制系统中起着获取信息和传送信息的作用。①减小纯滞后的方法,正确选择安装检测点位置,使检测元件不要安装在死角或容易结焦的地方。当纯滞后时间太大时,就必须考虑使用复杂控制方案。②克服测量滞后的方法,一是对测量元件时间常数进行限定。尽量选用快速测量元件,以测量元件的时间常数为被控对象的时间常数的十分之一以下为宜;二是在测量元件后引入微分环节,达到超前补偿。在调节器中加入微分控制作用,使调节器在偏差产生的初期,根据偏差的变化趋势发出相应的控制信号。③减小信号传递滞后的方法,尽量缩短气压信号管线长度,一般不超过 300m;较长距离的传输尽量转换成电信号;在气压管线上加气动继电器,以增大输出功率;按实际情况尽量采用基地式仪表等。 16. 基本调节规律:A.断续调节:位式;B.连续调节:比例、积分、微分。 17. PID 调节器的参数整定:整定内容;调节器的比例度δ,积分时间 T1 和微分时间 TD。整定方法;①经验试凑法,②临界比例度法,③衰减曲线法。 18. 复杂控制系统的分类分类:①为提高响应曲线的性能指标而开发的控制系统; ②为某些特殊目的而开发的控制系统。 19. 串级控制系统的工作原理:串级控制系统由两套检测变送器,两个调节器,两个被控对象和一个调节阀组成,其中两个调节器串联起来工作,前一个调节器的输出作为后一个调节器的给定值,后一个调节器的输出才送往调节阀。串级控制系统与简单控制系统有一个显著的区别,它在结构上形成了两个闭环,一个闭环在里面,成为副环或副回路,在控制过程中起着“初调”的作用,一个闭环在外面,称为主环或主回路,用来完成“细调”任务,以保证被控变量满足工艺要求。 20. 串级控制系统的工作特点控制系统的工作特点:①能迅速克服进入副回路的干扰②能改善被控变量的特性,提高系统克服干扰的能力③主回路对副对象具有“鲁棒性”,提高了系统的控制精度。 21. 串级控制系统的适用对象:凡是可以利用上述特点之一来提高系统的控制品质的场合,都可以采用串级控制系统,特别是在被控对象的容量滞后大,干扰强,要求高的场合,采用串级控制可以获得明显的效果。 22. 主副回路的选择依据主副回路的选择依据:让主要干扰位于副回路。23. 前馈控制相较于反馈控制的特点:在反馈控制中,信号的传递形成了一个闭环系统,而在前馈控制中,则只有一个开环系统,闭环系统存在一个稳定性的问题,调节器参数的整定首先要考虑这个稳定性问题,但是,对于开环控制系统来讲,这个稳定性问题是不存在的,补偿的设计主要是考虑如何获得最好的补偿效果。在理想情况下,可以把补偿器设计到完全补偿的目的,即在所考虑的扰动作用下,被控变量始终保持不变,或者说兑现了“不变性”原理。 24. 前馈-反馈控制系统:在工程上往往将前馈与反馈结合起来应用,既发挥了前馈校正作用及时的优点,又保持了反馈控制能克服多种扰动及对被控变量最终检验的长处,是一种适合化工过程控制的控制方法。 25. 系统误差:指在相同条件下,多次测量同一被测量值的过程中出现的一种误差,它的绝对值和符号或者保持不变,或者在条件变化时按某一规律变化。 26. 随机误差:又称偶然误差,它是在相同条件下多次测量同一被测量值的过程中所出现的绝对值和符号以不可预计的方式变化的误差。 27. 粗大误差:明显的歪曲测量结果的误差称为粗大误差,这种误差时由于测量操作者的粗心,不正确的操作,实验条件的突变或实验状况尚未达到预想的要求而匆忙实验等原因所造成的。 28. 减小误差的方法:①标准法:预先测出系统误差,然后对测量值进行修正。由于修正值本身存在一定误差,因此这种方法只适用于工程测量,②零示法:测量误差与读数误差无关,主要取决于已知的标准量,但要求指示器灵敏度足够高,如电位差计(平衡式电桥)。③代替法:用已知量来代替被测量的测量方法。④交换法:将引起系统误差的某些条件相互交换以达到减小或消除误差的方法。(例如等臂天平称量物体时),此外还有对称法、微差法、比较法等。 29. 仪表的绝对误差:仪表指示值与被测变量真值之间的代数差. 30. 仪表的相对误差:测量的绝对误差与被测变量的约定真值(实际值)之比. 31. 仪表的引用误差:绝对误差与仪表的量程之比. 32. 仪表的精度等级:工业自动化仪表通常根据引用误差来评定其精确度等级,并规定用允许引用误差限去掉百分号后的数字来表示精度等级。如精度等级为 1.0 级的仪表其允许引用误差为 1.0%。精密等级值越低的仪表其精确度越高。 33. 流量的概念:流量是指单位时间内流过某一截面的流体数量的多少。 34. 流量计的分类:A 压差式流量计,B 转子式流量计、C 电磁式流量计 35. 压差式流量计的工作原理:当充满管道的流体流经节流装置时,流束收缩,流速提高,静压减小,在节流装置前后会产生了一定的压差。这个压差的大小与流量有关,根据它们之间的关系即可得到流量的大小。 36. 压差式流量计结构上的核心部件:核心部件是节流装置,包括节流元件,取压装置以及其前后管段。 37. 常见的节流装置分类:孔板,喷嘴,文都利管. 38. 液位的概念:液位是指液体介质液面的高低。 39. 液位计的分类:按工作原理可分为直读式、浮力式、静压式、电容式、光纤式、激光式、核辐射式。 40. 静压式液位计的工作原理:通过测量某点的压力或该点与另一参考点的压差来间接测量液位。 41. 变送器的作用:将测量元件的输出信号转换为一定的标准信号,送后续环节显示、记录或调节。 42. 变送器的分类:变送器按驱动能源不同的分类:气动变送器,电动变送器。 43. 气动变送器和电动变送器的区别:气动变送器是以压缩空气为驱动能源,电动变送器是以电力为能源。 44. 常用的标准信号:电压(1-5V DC),电流(4-20mA),气压(20-100kPa)信号。 45. 常见的气动元件和组件:1.气阻 2.气容 3.阻容耦合组件:(1)节流通室(2)节流盲室 4. 喷嘴-挡板机构 46. 安全火花的定义安全火花的定义:指该火花的能量不足以对其周围可燃介质构成点火源。 47. 自动化仪表的防爆结构类型及各自特点:①隔爆型,仪表的电路和接线端子全部置于隔爆壳体中,表壳的强度足够大,表壳接合面间隙足够深,最大的间隙宽度又足够窄,即使仪表因事故产生火花,也不会引起仪表外部的可燃性物质发生爆炸。②本质安全防爆型,防爆性能好,理论上适用于一切危险场所;安全性能不随时间而变化;可在线进行维修、调整。 48. 安全防爆系统的构成及工作原理:安装在危险场所中的本质安全电路及安装在非危险场所中的非本质安全电路。为了防止非本质安全电路中过大的能量传入危险场所中的本质安全电路中,在两者之间采用了防爆安全栅,使整个仪表系统具有本质安全防爆性能。 49. 执行器按工作能源的分类:气动执行器、电动执行器、液动执行器 50. 电动执行器的分类:1.按照输入位移的不同,电动执行机构可分为角行程(DKJ 型)和直行程(DKZ 型);2.按照特性不同,电动执行机构可分为比例式和积分式。 51. 调节阀的理想流量特性:在调节阀前后压差一定的情况下的流量特性称为调节阀理想流量特性,根据阀芯形状不同,主要有直线,等百分比(对数),抛物线及快开四种理想流量特性。 52. 调节阀的工作流量特性:在实际使用调节阀时,由于调节阀串联在管路中或与旁路阀并联,因此阀前后的压差总在变化,这时的流量特性称为调节阀的工作流量特性。 53. 常见的流量特性分类及其使用特性:A.理想流量特性①直线流量特性,在流量小时,流量的变化值大,而流量大时,流量变化的相对值小。因此具有直线流量特性的调节阀不宜用于负荷变化较大的场合。②对数流量特性,适应能力强,在工业过程控制中应用广泛。③快开流量特性,主要用于迅速启闭的切断阀或双位调节系统。④抛物线流量特性,介于直线流量特性与等百分比流量特性之间。 B.工作流量特性①串联管道工作流量特性②并联管道工作流量特性. 54. 串联管道工作流量特性:系统的总压差ΔP 等于管路系统的压差ΔP1 与调节阀的压差Δ Pv 之和.系统管道的压差与通过的流量的平方成正比,若系统的总压差ΔP 不变,调节阀一旦动作, ΔP1 将随着流量的增大而增加,调节阀两端的压差ΔPv 则相应减少.以 S 表示调节阀全开时阀上的压差ΔPv 与系统总压差ΔP 之比,S=1 时,工作特性与理想特性一致;随着 s 值减小,管道阻力损失增加,实际可调比减小,流量特性发生畸变,由直线趋于快开,等百分比趋于直线。实际使用中,S 过大或过小都不合适,通常希望介于 0.3-0.5. 55. 调节阀选型内容:口径、型式、固有流量特性、材质. 56. 调节阀的可调比:调节阀能够控制的最大流量与最小流量之比,即R=qvmax/qvmin . qvmin 不等于阀的泄漏量, qvmin 指阀能控制的流量下限,一般为(2%--4%)qvmin,而阀的泄漏量指阀处于关闭状态下的泄漏量,一般小于0.1%C(C 为流量系数). 57. 进行电-气或气-电转换的原因:控制系统中调节执行单元品种繁多,电、气信号常混合使用,需进行电-气或气-电转换. 58. 电-气转换器及电-气阀门定位器:A.电-气转换器作用:将从电动变送器来的电信号变成气信号,送气动调节器或气动显示仪表。工作原理:力矩平衡原理 B.电-气阀门定位器作用:将电动调节器输出信号变成气信号去驱动气动调节阀主要功能:电气转换+气动阀门定位工作原理:力矩平衡原理. 59. 计算机控制系统的组成:计算机控制系统是由工业对象和工业控制计算机两大
PROFIBUS 到 MODBUS 协议总线桥
PB-B-MODBUS/232/485/V32 产品手册
(下册 PB-B-MS/V32:MODBUS 从站)
V 3.2
北京鼎实创新科技有限公司
北京鼎实创新科技有限公司
关于本手册
本手册分为上、下两册,上册是关于 MODBUS 主站的手册,下册是关于 MODBUS 从站的手册, 可分开阅读。
关于 V3.2 版本
1. 新产品 V3.x 型(PB-B-MODBUS/232/485/V3.x)是 V2 型(PB-B-MODBUS/232/485/V2)的改进型产 品;V3.x 与 V2 完全兼容,即原使用 V2 型产品的场合,使用 V3.x 型产品替换,不必作任何改动。 2. V3.x 型产品,在 PROFIBUS 一侧只做 PROFIBUS 从站;在 MODBUS 一侧即可做 MODBUS 主站(见 图 0-1),也可以做 MODBUS 从站(见图 0-2)。本手册以 V3.2 型产品为例来介绍它的使用。
PROFIBUS 主站
PROFIBUS-DP PB-B-MODBUS/V32 PB-B-MODBUS/V32
RS232 PROFIBUS 设备 PROFIBUS 设备
RS485
MODBUS 从站设备 图 0-1 PB-B-MODBUS/232/485/V32 主站
MODBUS 从站设备
上图 0-1 中 PB-B-MODBUS/232/485/V32 在 MODBUS 一侧是主站, 通过 RS232/485 接口连接到 MODBUS 从站设 备上。
PROFIBUS 主站
PROFIBUS-DP PB-B-MODBUS/V32 PB-B-MODBUS/V32
PROFIBUS 设备 PROFIBUS 设备
RS232
RS485
MODBUS 主站设备 图 0-2 PB-B-MODBUS/232/485/V32 做从站
MODBUS 主站设备
上图 0-2 中 PB-B-MODBUS/232/485/V32 在 MODBUS 一侧是从站, 通过 RS232/485 接口连接到 MODBUS 主站 设备上。
tel: 010-********
1
web: https://www.doczj.com/doc/005410642.html,