基金项目:湖南省自然科学基金(04JJ30050);国家安全生产监督管理
总局科技发展计划资助(06-399)收稿日期:2007-03-08 收修改稿日期:2007-03-26
基于DSP 与CAN 总线的旋转机械分布式智能监测系统
阳小燕1,2,刘义伦1,金晓宏1
(1.中南大学机电工程学院,湖南长沙 410083;2.湖南科技大学机电工程学院,湖南湘潭 411201)
摘要:针对微机集中监测布线困难和信号处理仪器分散复杂的不足,主要研究了基于DSP 与C AN 总线的旋转机械分布式通用智能监测系统,实现信号处理电路的集成和数字控制,并对各类信号采用不同方法进行采集、处理、分析和故障诊断,同时通过C AN 总线与服务器相连构成监测与管理网络,并根据机组运行状态的形式选择不同的通讯数据,由监测主机实现先进算法处理与精密故障诊断,构成两级分析与监测系统,提高系统的实时性和诊断的可靠性。关键词:旋转机械;监测系统;DSP ;C AN
中图分类号:T B492;TP277 文献标识码:B 文章编号:1002-1841(2007)06-0041-03
Distributed I ntelligent Monitoring System of
R otating Machinery B ased on DSP and CAN
Y ANG X iao 2yan 1,2,LI U Y i 2lun 1,J I N X iao 2hong 1
(1.College of E lectromech anical E ngineering ,Central South U niversity ,Ch angsh a 410083,China ;
2.College of E lectromech anical E ngineering ,H unan U niversity of Science and T echnology ,Xiangtan 411201,China)Abstract :T o the difficulty of arranging wire of PC m onitoring and the disperses and com plicated of signal treatment instrument ,ana 2lyzed a distributed universal intelligent m onitoring system of rotating machinery based on DSP and C AN.Realized the integration and digital control sam pled ,handled ,analyzed and fault diagnosed different https://www.doczj.com/doc/0d4784608.html, posed a local m onitoring and manages netw ork by C AN and chosed different data to communicate according different operation state.realized the advanced alg orithm treatment and precise malfunction diagnose by the host com puter ,com posed tw o 2stage analysis and m onitor ,and raised systematic real time and diagnostic reliability.K ey w ords :rotating ;machinery ;m onitoring system ;DSP ;C AN 0 引言
大型旋转机械在生产中经常发生因转子不平衡、转子弯曲、轴承损坏、电机故障等被迫停车检修的情况,影响了正常生产,造成了很大的经济损失。在监测手段上,传统的手持式数据采集仪因体积小、携带方便等优点而广泛应用于工业现场,但由于其处理能力有限不能实现实时在线数据监测和分析,因而不能满足需要实时监测的重要机电设备进行数据采集分析的要求。工控机加数据采集卡的微机监测系统替代手持式数据采集仪虽然可以满足重要工业场合对设备运行数据采样、处理的速度和性能方面的要求,但昂贵的价格和相对庞大的体积,以及大量的布线使其应用范围受到了制约。中南大学在自主研制的风机运行状态微机实时监测系统RM M D03的基础上,开发了信号处理电路高度集成的基于DSP 和C AN 总线的旋转机械分布式通用状态监测系统RM M D05,实现信号采集、分析与简易故障诊断,实时监测运行状态,并通过总线将数据传输至监控服务器进行状态显示、数据管理与精密故障诊断分析,有效地防止故障的发生,确保旋转机械长周期安全、可靠、有效地运行,具有重大的经济效益和现实意义。
1 DSP
[1-2]
1.1 TMS320LF2407A
[3]
T MS320LF2407A 是一种定点DSP 芯片,主要应用于信号处
理与工业控制领域,具有丰富的信号处理指令。
1.2 TMS320LF2407A 内嵌CAN
(1)可靠性高,支持多处理器,链路简单,支持优先级处理。(2)多主方式工作,网络上任意节点均可主动向其他节点
发送信息,且可按系统实时性要求分成不同的优先级,一旦发生总线冲突可减少总线仲裁时间。
(3)采用短帧结构,受干扰概率低,不会占用总线时间过
长,可保证通信的实时性。
(4)发送的信息遭到破坏后,可自动重发,节点在错误严重
时具有自动退出总线的功能。
(5)其传输介质可用双绞线、同轴电缆或光纤,通信速率最
高达1M bit/s (40m )和5k bit/s (10km ).
2 监测系统构成
2.1 监测参数选择及传感器安装
根据旋转机械故障的典型特征[4],选择旋转机械常用的监测参数有:振动加速度、振动速度、振动位移、旋转速度、轴承温度、风压、电机电流等工艺参数,在具体应用时,针对具体的监测对象选择适当的监测参数。
(1)振动测量参数的选择:振动量是旋转机械检测的一个
重要标准,已经形成了比较完善的检测与故障诊断体系,其检测参量有振动加速度、振动速度和振动位移,具体传感器类型的选择可根据具体监测对象振动信号的频率特征并参照如下
2007年 第6期
仪表技术与传感器
Instrument T echnique and Sens or 2007
N o 16
规则来选择:振动信号频率为1~10H z 时,选择振动位移传感器;信号频率为10H z ~1kH z 时,选择振动速度传感器;信号频率大于1kH z 选择振动加速度传感器。
在电机轴承座和旋转机械轴承座的水平、垂直和轴向3个方向安装振动传感器。根据振动信号提取振动特征,诊断系统故障。
(2)转轴振动位移:根据转轴的振动位移形成的轴心轨迹
是判断转轴实际振动的重要依据,在靠近旋转机械支撑轴承座内侧互相成90°安装电涡流非接触式位移传感器,监测转轴振动位移,根据轴心轨迹判断故障。
(3)温度信号:轴承温度是直接反映轴承故障的重要参数,
直接关系到润滑油与冷却水的控制。一般在电机和旋转机械两端轴承安装温度传感器,在机壳也可安装温度传感器。
(4)转速及键相:振动信号的故障诊断通常需要幅值与相
位信息,信号的整周期采集也需要采用鉴相信号启动采样,键相传感器安装在转轴或连轴器。
(5)电流信号:电机电流信号是分析电机故障的典型方法,
对转子断条、短路、转子偏心、定子线圈短路等故障有很好的分析效果。电流信息的采集可在电机进线或者二次电路安装电流互感器。
(6)其余工艺参数:流量、进/出口风压和风温、冷却水进/
出口温度等。
2.2 分布式监测系统原理
为构造通用分布式监测系统,系统必须包含适合所有监测参数的信号采集子系统、信号处理子系统和通讯子系统。其中,信号采集子系统采集信号的类型包括振动加速度、振动速度、位移、电流、温度、风压等,不同频率信号必须采用不同的采集频率以及不同的采样数据量,因此,采集通道的设置必须灵活而且可程序控制。各监测系统可设置不同的优先等级,并自主通讯,系统结构图如图1所示
。
(1)采样通道与采样频率的设置:根据监测参数选择合适
的传感器,同类型的传感器设置为相邻的通道,进行批次采样,不同类型信号以不同频率、不同数据量进行采集。如1#~4#通道为振动速度,采样频率为5kH z ,5#、6#通道为轴位移,采样频率为1kH z ,7#、8#通道为轴承温度,采样频率为10H z ,
9#通道为电机电流,采样频率为500H z ,10#通道为风压,采样
频率为500H z.
(2)信号预处理与分析程序:对不同类型的信号采用不同
的预处理和分析算法,并进行批次信号处理,如振动加速度、速度、位移、电流信号,选择相应的滤波器参数进行滤波,并计算时域指标(有效值、峰峰值、峰值指标、峭度指标、方差),根据短时傅里叶变换算法提取特征信息(011~0149f n 、015f n 、0151f n ~
0199f n 、f n 、2f n 、3f n 、4f n 、5f n 以及滚动轴承特征频率和系统固
有频率,f n 为旋转工频),判断运行状态,如有故障则报警。对温度等缓变信号低通滤波后,采用多值平均法进行统计分析,并进行阈值比较与报警。
(3)通讯子程序:通讯模块实时将分析结果发送到上位机,
如果系统状态正常,则实时将分析结果上传至上位机,并以一定间隔周期发送原始数据至上位机进行动态显示和精密诊断;如果系统状态异常则每次均将原始数据发送至上位机;当下位机简易诊断为状态正常而上位机精密诊断状态异常,则上位机请求下位机发送原始数据进行精密诊断。
2.3 监测系统硬件结构
监测系统采用T MS320LF2407A 芯片为核心,指令周期为
25ns ,其内部集成有16通道的10位A/D 转换器,A/D 转换时
间为375ns ,可满足旋转机械的监测速度与信号分析的要求。
监测系统的模拟信号处理电路采用信号跟随电路、程控滤波器和程控放大电路,滤波电路采用双路可编程滤波器集成芯片Max262,通过DSP 控制滤波器类型和滤波频率,实现滤波的可程控性。放大电路采用4路64抽头数字电位器DS1844与集成运放芯片AD526组成的程控放大电路,放大增益通过DSP 由程序控制。监测系统16路输入通道全部设计有信号处理电路,可根据信号类型通过软件预置不同的参数,各通道并行工作。
A/D 转换由T MS320LF2407A 片内2个10位A/D 转换器完
成,共16通道,同类型的传感器选择相邻的输入通道,以同时批次信号采集,根据键相信号触发整周期采样,可采集1个或连续几个周期,采集数据保存在缓冲区。
C AN 总线通讯由DSP 内嵌C AN 总线控制器,外部扩展具有
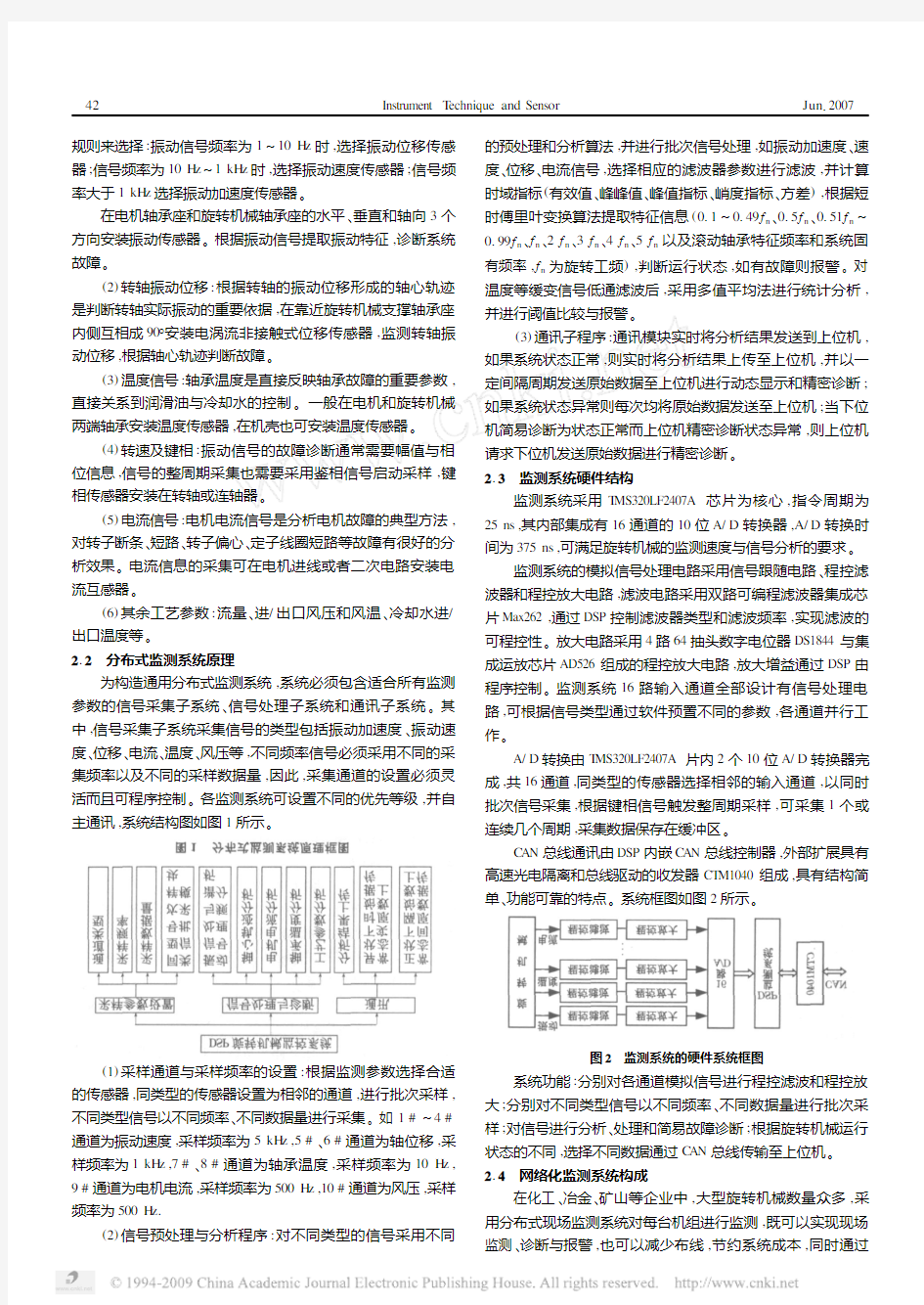
高速光电隔离和总线驱动的收发器CT M1040组成,具有结构简单、功能可靠的特点。系统框图如图2所示
。
图2 监测系统的硬件系统框图
系统功能:分别对各通道模拟信号进行程控滤波和程控放大;分别对不同类型信号以不同频率、不同数据量进行批次采样;对信号进行分析、处理和简易故障诊断;根据旋转机械运行状态的不同,选择不同数据通过C AN 总线传输至上位机。
2.4 网络化监测系统构成
在化工、冶金、矿山等企业中,大型旋转机械数量众多,采用分布式现场监测系统对每台机组进行监测,既可以实现现场监测、诊断与报警,也可以减少布线,节约系统成本,同时通过
42
Instrument T echnique and Sens or
Jun 12007
网络化,由监控站服务器采用提升小波信号分析算法、信息融合理论和模式识别算法实现故障精密诊断。现场分布式监测系统通过C AN 总线构成监测网络,与控制室的服务器相连,由服务器进行集中显示、数据保存与精密诊断。
上位机选用I BM -PC 机,通过C AN 总线计算机接口卡实现总线的连接,同时,监测数据通过以太网实现共享,其管理机构和远程诊断专家可在网络上浏览、查看和分析系统运行状态,诊断专家可在网络上实现远程故障诊断,系统的构成如图3所示
。
图3 基于CAN 总线的网络化监测系统
3 上位机软件设计
上位机分析和管理程序采用VC ++和Matlab 软件混合编程实现,由VC ++软件开发主界面、图形绘制、文件的打开与保存,采用Matlab 软件开发信号分析与计算程序。
311 实时显示运行状态参数
实时显示被监测设备运行状态数据(包括时域振动波形、轴心轨迹图、柱状图及时域特征参数、频谱图等),现场技术人员可以根据屏幕显示的各项数据直接了解设备运行的状态。软件系统框图如图4所示,系统运行界面如图5所示
。
图4 软件系统结构框图
312 历史数据查询
将整个监测周期的数据存入历史数据库,可以查阅和分析历史数据,通过对历史数据的比较,了解设备的变化趋势,便于技术人员对设备状态进行分析与故障诊断。
313 数据分析与故障诊断
上位机充分利用其计算和分析的特点,对信号采用先进算法进行处理[5-8](连续提升小波信号降噪和频谱变换、多传感器的信息融合、多个故障混合情况下的盲源信号分离,故障特征的数据挖掘),提高系统的精密诊断能力。
314 通讯模块
上位机接收下位机传送的实时分析数据,当上位机诊断出有异常时,请求下位机上传实时原始采样数据。当网络拥塞
时,以高优先级请求重要设备传输数据
。
图5 监测系统主界面
4 结束语
主要研究了基于DSP 与C AN 总线的旋转机械分布式通用智能监测系统,可任意选择旋转机械的监测参数与测点数,灵活设置程控滤波和程控放大参数,并对不同类型信号进行相应的同批次采样、处理、分析和故障诊断,实时监测运行状态,同
时通过C AN 总线与服务器相连构成局域监测与管理网络,现场监测系统根据机组不同的运行状态选择不同的数据进行通讯,上位机实现区域设备群的集中监控、管理与精密故障诊断,并通过以太网实现数据的共享。
该系统已在中国铝业河南分公司、凡口铅锌矿等多个企业投入运行,应用效果表明:该系统运行稳定,能直观有效地监测旋转机械运行状态,准确及时发现、诊断和预报故障,具有很好的应用效果。该系统为旋转机械通用监测与诊断系统,对不同设备只需要通过参数设置与设备运行相关的参数值,可以很方便地应用于各种旋转机械,具有很好的推广应用价值。参考文献:
[1] 贺玉凯,邓建平,张芳.基于DSP 的智能局部通风机控制系统研
究.煤炭工程,2005(3):73-75.
[2] 阳小燕,周国荣,陈新.基于DSP 的G R -II 机器人控制器.中南工
业大学学报,2001,32(4):428-432.
[3] 王博,蒋云峰,刘杰.基于CAN 总找的网络监控系统.微计算机信
息,2004,20(3):16-17.
[4] 王洋,高金吉,夏松波.旋转机械支承系统故障机理及识别特征的
研究.哈尔滨工业大学学报,1999,31(5):104-106.
[5] 季忠,金涛,杨炯明.基于独立分量分析的消噪方法在旋转机械特
征提取中的应用.中国机械工程,2005,16(1):50-53.
[6] 李武朝,朱大奇.基于信息融合的便携式旋转风机故障诊断分析
仪.仪表技术与传感器,2006(3):14-17.
[7] GE LLE G,CO LAS M ,DE LAUNAY G.Blind s ources separation applied
to rotating machines m onitoring by acoustical and vibrations analysis.M e 2chanical Systems and S ignal Processing ,2000,14(3):427-442.[8] LEE T W.Independent com ponent analysis using an extended in fomax al 2
g orithm for m ixed subgaussian and supergaussian s ources.Neural C om pu 2tation ,1999,11(2):409-433.
作者简介:阳小燕(1974—),讲师,博士研究生,主要从事信号处理、故障
诊断方面的教学与研究。
第6期
阳小燕等:基于DSP 与C AN 总线的旋转机械分布式智能监测系统
43
函数图像变换与旋转 一.平移变换: 1.y=f (x )→y=f(x±a )(a>0) 原图像横向平移a 个单位(左+右-) 2.y=f (x )→y=f(x)±b(b>0) 原图像纵向平移b 个单位(上+下-) 3.若将函数y=f (x )的图像右移a ,上移b 个单位,得到函数y=f (x-a )+b 二.对称变换: 1.y=f (x )→y=f(-x) 原图像与新图像关于y 轴对称; 对比:若f=(-x )=f (x ) 则函数自身的图像关于y 轴对称; 2.y=f (x )→y=-f(x) 原图像与新图像关于x 轴对称; 3.y=f (x )→y=-f(-x) 原图像与新图像关于原点对称; 对比:若f (-x )=-f (x )则函数自身的图像关于原点对称; 4.y=f (x )→y=f -1 (x )原图像与新图像关于直线y=x 对称; 5.y=f (x )→y=f -1(-x )原图像与新图像关于直线y=-x 对称; 6.y=f (x )→y=f(2a-x )原图像与新图像关于直线x=a 对称; 7.y=f (x )→y=2b-f (x )原图像与新图像关于直线y=b 对称; 8.y=f (x )→y=2b-f (2a-x )原图像与新图像关于点(a ,b )对称; 三.翻折变换: 1.y=f (x )→y=f(|x|)的图像在y 轴右侧(x>0)的部分与y=f (x )的图像相同,在y 轴的左侧部分与其右侧部分关于y 轴对称; 2.y=f (x )→y=|f(x)|的图像在x 轴上方部分与y=f (x )的图像相同,其他部分图像为y=f (x )图像下方部分关于x 轴的对称图像; 3.y=f (x )→y=f(|x+a|)变换步骤: 法1:先平移|a|个单位(左+右-)保留直线x=a 右边图像,后去掉直线x=a 左边图像并作关于直线x=a 对称图像y=f (x )→y=f(x+a )→y=f(|x+a|) 法2:先保留y 轴右边图像,去掉y 轴左边图像,并作关于y 轴对称图像,后平移|a|个单位(左+右-)y=f (x )→y=f(|x|)→y=f(|x+a|) 四.伸缩变换: 1.y=f (x )→y=af(x)(a>0)原图像上所有点的纵坐标变为原来的a 倍,横坐标不变; 2.y=f (x )→y=f(ax)(a>0)原图像上所有的横坐标变为原来的1a ,纵坐标不变;
《传感器与物联网技 术》 综合报告 题目:智能环境与物联网技术 专业: 学号: 姓名: 提交日期:二О一六年六月 摘要
环境与所有人的日常生活都息息相关,而物联网技术也随着计算机技术,信息技术,以及智能技术的发展越来越多的开始被应用到我们的日常生活中来。本文主要针对物联网技术应用到环境监测中的相关问题进行了分析与探讨。 智能环境利用各种传感器技术,移动计算,信息融合等技术对空气环境,海洋环境,河,湖水质,生态环境,城市环境质量进行全面有效地监控,通过构建全国各地环境质量的检测实现对全国范围内的环境进行实时在线监控和综合分析,建立全国性的污染源信息综合管理系统,为采取环境治理措施和污染预警提供更客观,有效的依据。 关键字:智能环境物联网技术传感器
目录 1引言 (4) 1.1 物联网简介 (4) 1.2智能环境研究的目的和背景 (4) 2需求分析 (4) 2.1智能环境功能需求分析 (5) 2.2各子系统需求分析 (5) 2.2.1大气污染监测子系统需求分析 (5) 2.2.2海洋污染监测子需求分析 (5) 2.2.3水质监测子系统需求分析 (5) 2.2.4生态环境检测子系统需求分析 (5) 2.2.5城市环境检测子系统需求分析 (5) 2.3其他非功能需求分析 (6) 2.3.1可靠性需求 (6) 2.3.2开放性需求 (6) 2.3.3可扩展性需求 (6) 2.3.4安全性需求 (6) 2.3.5应用环境需求 (6) 3详细设计 (6) 3.1各环境监测子系统解决方案 (6) 3.2智能环境监测系统结构图 (5) 3.2.1各子系统环境监测拓扑结构图 (6) 4结论 (12) 参考文献 (13)
三年级信息技术图形的翻转和旋转教案 课题 图形的翻转和旋转 学科信息技术学段:小学年级三年级 相关 领域语文思品美术 指导思想与理论依据 作为信息技术课教学,不能只是单纯地学习软件的操作,这样是难以激发学生的学习兴趣的,而且教学中要注重让学生理解这些操作能够用来做什么。因此,本课教学通过谜语导入,激发学生的学习兴趣,并以同学们所喜闻乐见的的童话人物孙悟空为主线来展开教学,把知识点的学习融入到具体而有趣的任务之中。并通过最后创编图画和故事的环节,锻炼和培养了学生的想象力、创造力以及语言表达能力,并不失时机地对学生进行德育渗透。教学背景分析教学内容:本课内容是北京市义务教育课程改革实验教材小学信息技术册第三单元第18课《图形变化真奇妙》中的内容,教学对象是小学三年级学生。本节课突出设计了《图形的翻转和旋转》的教学内容,增强学生对绘画图形的表现力。
学生情况:通过前一阶段学习和操作,学生已经基本掌握了电脑绘图程序有关画图工具的操作方法,并能较熟练地对图形进行选定、缩放、移动、复制、粘贴等操作。能够完成一些简单的绘图制作。 教学方式:任务驱动法 教学手段:在学习方法上采取自主探究和小组合作式学习。通过“排行榜”环节,对学生的小组合作学习进行评价和促进。 技术准备:多媒体计算机教学网络系统、局域网教室,每台学生机学习用图片2张,以及综合练习图片素材4张。 教学目标 知识与技能:会用翻转、旋转的方法变化图形 过程与方法: 培养学生自主探究能力和创新能力 培养学生的小组合作学习能力 情感态度与价值观: 鼓励学生敢于想象、大胆创新,并体验与其他同学合作完成学习任务的乐趣 通过根据完成作品内容创编故事,培养学生要互相帮助、爱护动物、节约用水及心中有他人等良好品质
森林生态环境监测站系统架构 文/北京方大天云科技有限公司 FAMEMS-ST森林生态监测站是针对森林生态系统典型区域内的风、温、光、湿、气压、降水等常规气象因子进行系统、全天候连续监测的自动气象站。用于测量林内梯度分布特征相关的气候因子,测量不同森林植被类型的小气候差异,研究各种类型小气候的形成过程的特征及其变化规律等相关研究工作。为森林生态研究相关部门对森林下垫面的小气候效应及其对森林生态系统的影响提供数据支持。 系统内容 FAMEMS-ST森林生态监测站是依据森林气象学与《森林生态系统长期定位观测方法》规范设计的一款综合生态监测站。支持多种传感器组合搭配的形式,无线/P2P/卫星通讯等多种通讯方式传输,观测要素包括:梯度风速风向、温度、湿度、土壤水势、光和有效、地表及地下水位、太阳辐射、气体浓度、林木生长状态、树茎、冠层等要素。该站主要观测梯度分布包括:地上四层为冠层上3m、冠层中部、距地面 1.5m 和地被层,地下四层为地面以下5cm、10cm、20cm、40cm。该站可通过电缆连接数据采集器的通信口和PC 机,可查看数据采集器内存中的数据文件。数据可存储在SD 卡中,通过直接读取SD 卡,或通过Ethernet,采用FTP 或Http查看数据,也可通过GPRS远程传输数据到用户端。 系统指标
工作环境:-50~+50℃、0~100%RH 可靠性:平均无故障时间>5000小时 防护等级:IP65 采集通道:模拟通道和数字通道可扩展 通讯方式:有线传输、GPRS无线传输 操作系统:嵌入式、智能可编程 电源:220VAC或太阳能 功能特点 监测多种气象环境因子及空气和水环境因子 提供长期连续的准确生态气候变化数据 太阳能供电,可在野外各种环境下使用 可连接信息显示屏 数据存储量大,可无线或有线传输数据 典型应用 森林生态研究监测系统 森林小气候监测系统 森林生态保护及恢复研究 生态产业监测系统 科研基地生态研究系统 土壤土质研究系统 系统组成 传感器:梯度风速风向+温度+湿度+土壤水势+光和有效+地表及地下水位+太阳辐射+气体浓度+林木生长状态+树茎+冠层
基于DSP的数字图像处理 时间:2009-12-08 15:40:35 来源:作者:张振福,周江涛国防科技大学 随着计算机、多媒体和数据通信技术的高速发展,数字图像技术近年来得到了极大的重视和长足的发展,并在科学研究、工业生产、医疗卫生、教育、娱乐、管理和通信等方面取得了广泛的应用。同时,人们对计算机视频应用的要求也越来越高,从而使得高速、便捷、智能化的高性能数字图像处理设备成为未来视频设备的发展方向,实时图像处理技术在目标跟踪、机器人导航、辅助驾驶、智能交通监控中都得到越来越多的应用。由于图像处理的数据量大,数据处理相关性高,实时的应用环境决定严格的帧、场时间限制,因此实时图像处理系统必须具有强大的运算能力。各种高性能DSP不仅可以满足在运算性能方面的需要,而且由于DSP的可编程性,还可以在硬件一级获得系统设计的极大灵活性。为了获得足够的计算能力,我们以两片TMS320C6201作为系统的运算中心构筑了实时图像处理系统;为了获取最大的灵活性,在系统体系机构上采用了一种可重构的FPGA计算系统模型。 1 功能强大的TMS320C6x TMS320C6000是美国TI(Texas Instruments)公司于1997年推出的新一代高性能DSP芯片。这种芯片是定点、浮点兼容的DSP。其定点系列是TMS32C62XX,浮点系列是TMS320C67XX。最早推出的C6201芯片的运算速度已经达到1600MIPS,在业界首次突破1000MIPS,在数字信号处理器数里能力上创造了新的里程碑,并因此获得了美国EDN杂志“1997年度创新大奖”2000年3月,TI发布了新的C64XX内核,主频1.1GHz,处理速度接近9000MIPS,总体性能比C62XX提高了10~15倍。其中C6416在2002年3月获得EDN杂志“2001年度创新大奖”。 C6000内部结构的主要特点包括: ①定点/浮点系列兼容DSP,目前CPU主频100MHz~600MHz。 ②具有先进VLI W结构内核。 (1)8个独立的功能单元:6个ALU(32/40bit),2个乘法器(16×16),浮点系列支持IEEE 标准单精度和双精度浮点运算。 (2)可以每周期执行8条32bi t指令,最大峰值速度4800MIPS。 (3)专用存取结构,32/64个32bit通用寄存器。 (4)指令打包技术,减少代码容量。 ③具有类似RISC的指令集。 (1)32bit寻址范围,支持bit寻址。 (2)支持40bitALU运算。 (3)支持bit操作。 (4)100%条件指令。 ④片内集成大容量SRAM,最大可达8Mbit。 ⑤16/32/64bit高性能外部存储器接口(EMIF)提供了与SDRAM、SBRAM和SRAM登同步/异步存储器的直接接口。 ⑥内置高效率协处理器(C64X)。 (1)Viterbi编解码协处理器(VCP),支持500路7.95kb/s AMR。 (2)Turbo码编解码协处理器(TCP),支持6路2Mb/s 3GPP。 ⑦片内提供多种集成外设(不同芯片的资源不同) (1)多通道DMA/EDMA控制器
第四期全国设备状态监测与故障诊断实用技术培训班讲义 大型旋转机械的状态检测与故障诊断 沈立智 中国设备管理协会设备管理专题交流中心 2007年9月 西安
目录 第一节状态监测与故障诊断的基本知识 (6) 一、状态监测与故障诊断的意义及发展现状 (6) 1. 状态监测与故障诊断的定义 (6) 2. 状态监测与故障诊断的意义 (6) 3. 状态监测与故障诊断的发展与现状 (8) 二、大机组状态监测与故障诊断常用的方法 (9) 1. 振动分析法 (9) 2. 油液分析法 (10) 3. 轴位移的监测 (11) 4. 轴承回油温度及瓦块温度的监测 (11) 5. 综合分析法 (11) 三、有关振动的常用术语 (11) 1. 机械振动 (11) 2. 涡动、进动、正进动、反进动 (11) 3. 振幅 (12) 3.1 振幅 (12) 3.2 峰峰值、单峰值、有效值 (12) 3.3 振动位移、振动速度、振动加速度 (13) 3.4 振动烈度 (13) 4. 频率 (15) 4.1 频率、周期 (15) 4.2倍频、一倍频、二倍频、0.5倍频、工频、基频、转频 (15) 4.3 通频振动、选频振动 (15) 4.4 故障特征频率 (16) 5. 相位 (19) 5.1 相位 (19) 5.2 键相器 (19) 5.3 绝对相位 (19) 5.4 相位差、相对相位 (20) 5.4 同相振动、反相振动 (21) 5.5 相位的应用 (21) 6. 刚度、阻尼、临界阻尼 (23) 7. 临界转速 (24) 8. 挠度、弹性线、主振型、轴振型 (25) 9. 相对轴振动、绝对轴振动、轴承座振动 (26) 10. 横向振动、轴向振动、扭转振动 (26) 11.刚性转子、挠性转子、圆柱形振动、圆锥形振动、弓状回转(弯曲振动) (26) 12. 高点、重点 (27) 13. 机械偏差、电气偏差、晃度 (28) 14. 同步振动、异步振动、亚异步振动、超异步振动 (28) 15. 谐波、次谐波(分数谐波) (28) 16. 共振、高次谐波共振、次谐波共振 (29) 17. 简谐振动、周期振动、准周期振动、瞬态振动、冲击振动、随机振动 (29)
建立广义设备状态监测系统 摘要: 关键词: 随着技术的飞速发展,生产系统的规模变得越来越大、功能越来越全、各部分关联越来越密切,这对于提高生产率、降低生产成本、提高产品质量起到了积极的作用;但另一方面,设备一旦发生故障,即造成停产、停工,带来的经济损失比过去较低生产水平时要大得多。特别是石油化工企业设备结构复杂、技术难度大、自动化程度高,工作环境具有高温、高压、生产介质易燃、易爆、易腐蚀和生产连续性强等特点。许多关键设备和大型机组一旦发生事故,会给企业生产和产品质量造成难以估量的损失,因此提高设备的可靠性和安全性就变成关键。为保证设备安全、稳定和长周期运行,进一步加强设备故障和设备隐患的动态管理,杜绝重大设备事故的发生,降低设备故障率及停机台次,就提出了搞好设备运行状态监测的要求。 1、设备状态监测 设备状态监测通常是指通过测定设备的某些特征参数(如振动、温度等),检查和确定设备的运行状态,是处于完好状态、良好状态、临界状态还是停机状态。进而可以结合设备的运行历史,对设备可能发生的或已经发生的故障进行预报、分析、判断,确定故障性质、类别、程度、原因、部位,指出故障发生和发展的趋势及后果,提出控制故障发展的措施,通过采取调整、维修、治理的对策消除故障,最终使设备恢复正常状态。 状态监测分主观状态监测和客观状态监测。主观状态监测指操作人员凭借自己的感官,即视觉(Seeing)、听觉(hearing)、嗅觉(Smell—ing)、触觉(Feeling),亦即利用人的目视、耳听、鼻闻、手摸等,对所操作和管辖范围内的设备、管线等进行检查,用人的主观能动性发现其隐患及故障苗头,掌握其状态,以便采取措施对其进行维护或检修。其结果取决于监测人员,因经验不同,所得到的声音、温度或直观感觉也各异。客观状态监测系指利用各种监测仪器、
旋转设备振动在线系统 技术方案 合肥优尔电子科技有限公司 2016. 8
一.现状分析 随着我国工业现代化进程的加快,对于连续生产的企业而言,大型旋转设备的稳定运行十分重要,一旦发生故障,都有可能导致整个生产线停机,造成极大的损失。这种损失可达每小时数十万元之巨,特别是生产过程智能控制系统的采用,对关键设备安全运行的依赖程度越来越高,因此,对这些设备进行在线监测就显得非常重要。 各种旋转设备运转过程中各零部件磨损并非相同,随其工作条件而异,但磨损的发展是有其规律的,如果能够对设备受到的这种磨损失效规律进行掌握,设备各零部件的相对运动趋势将反应出振动、温度、声音的连锁效应,使我们提前知晓设备各项功能发生改变的趋势与结果。国网铜陵发电有限公司拥有多种大、中、小型旋转设备,其较多旋转设备占据着生产中的核心地位。 二、系统架构 旋转设备振动在线监测系统,通过无线自组网和现场总线的方式,将从各传感单元采集的数据汇集到管理后台,通过计算机系统处理实现应用服务,计算机系统主要由数据前端设备、服务器机和管理端PC组成。 系统拓扑如下图所示: 三、振动采集终端 3.1振动传感器 在旋转设备两端轴座(具体部位可根据现场情况确定)设置两组三维(X、Y、Z方向)加速度振动传感器,测量振动位移矢量,监测主轴与轴瓦(轴座)之间的轴向、径向游离与波动情况。 振动传感器利用压电晶体的正压电效应,当压电晶体在一定方向的外力作用下,它的晶体面产生电压,采集电路检测出这个电压值后换算成受力大小F,由
公式a=F/m可以得出瞬间加速度大小a,对加速度二次积分得出瞬间位移量,从而得出被测对象振动频谱和振动位移。 主要技术参数: ●传感器类型:IEPE ●灵敏度:100mV/g? ●加速度量程:?0.1~100mm/s2 ●速度量程:0.1~250mm/s ●位移量程:1~3000μm ●频率范围:0.3~12000Hz(±10%) ●谐振点: 27kHz ●分辨率:?0.001g ●非线性:≤1% ●横向灵敏度:≤3% ●恒定电流:4mA ●输出阻抗:<100Ω ●激励电压:DC24V ●温度范围:-40~+80℃ ●放电时间常数:≥1秒 3.2振动采集器 ?YT-400?振动采集器是合肥优尔电子科技自主研发的一款高性能IEPE类传感器信号采集终端,内置了传感器所需的恒流激励和信号调理电路,可以不需外部的信号调理器而直接采集IEPE传感器的输出信号。YT-400具有四路大量程、高采样率、低噪声的高性能同步信号采集通道。每个通道的量程为±10V,采样率高达128Ksps,并能保证实时传输到后台服务器进行显示与分析。通过高性能ADC和先进的DSP信号处理技术,使YT-400具备极低的采样噪声,在1Ksps 采样率下采样噪声峰峰值仅为0.00004V,满量程信号的信噪比高达50万。多通道、高采样率和低噪声和同步采样使YT-400能够满足科研与生产中高端信号监测的需要。? YT-400系列采用跨平台通用的动态链接库作为驱动函数接口,可工作在
基于DSP的检测算法实现及优化 摘要:运动目标检测可以从连续变化的多幅图像中把运动目标提取出来。运动目标的捕捉对于目标分化、采集和动作归类等后续处理相当重要,因为后期过程只处理图像中运动目标周围一定范围内的像素。但由于运动目标所处背景的随机性,比如气候、光线及噪声干扰的影响,检测运动目标实际上是一项比较困难的任务。目前对于运动目标的检测的算法可以划分为两类:基于象素强度的算法及基于运动的算法。细分又包括四种:基于特征的方法、基于帧间差分的方法、基于背景建模的方法和基于光流场的方法。其中前三种属于基于象素强度变化检测的算法,第四种可以看作是基于运动的检测方法。基于强度算法容易实现、效率高,可处理目标跟踪问题比较难。基于运动的算法稳定性强,处理跟踪问题相对简单。该文重点研究目标检测的DSP算法实现,所以在参考大量文献后,选用了传统检测算法中速度较快而且相对便于硬件实现的帧间差分算法,为了取得良好快速的目标检测结果,该文采用Sobel算子与帧间差分结合的方法。 关键词:DSP的检测算法;实现及优化 中图分类号:TP311 文献标识码:A 文章编号: 1009-3044(2014)13-3070-05
1 基于Sobel算子的帧间差分检测算法 1.1 帧间差分法 由于红外图像的目标特性,用灰度变化表述物体的运动轨迹可以获得较高的检测效率,从而满足检测过程的实时性要求。 假设输入图像为: [F={fj(a,b),a∈X,b∈Y,j=0,1,2,....}] 其中,(a ,b)为实际场景中(X ,Y)上一点,[fj (a,b)]为第j帧上(a ,b)点的灰度值,j为图像的编号,以下为图像差分的结果: [D={dj(a,b),a∈X,b∈Y,j=0,1,2,....}] [其中:dj(a,b)={|fj(a,b)-fj-i(a,b)|,j=0,1,2,...;i=0,1,2,3,...}] [dj(a,b)]基本上体现出运动目标的边界和高差异区域。一般选择i=1也就是相邻两幅图像进行差分,如果运动目标的速度小于相邻两幅图像的时间差时,可以增大i值避免检测目标遗失。如i=5时仍然没有目标,则可以认为无检测目标,就换为下一幅图像(j+1)图像进行检测。 选择一个恰当的阈值[Tj],将差分结果[dj(a,b)] 转变为二值图像: [wj(a,b)=0,dj(a,b)≥Tj1,dj(a,b) 旋转机械振动的基本特性 概述 绝大多数机械都有旋转件,所谓旋转机械是指主要功能由旋转运动来完成的机械,尤其是指主要部件作旋转运动的、转速较高的机械。 旋转机械种类繁多,有汽轮机、燃气轮机、离心式压缩机、发电机、水泵、水轮机、通风机以及电动机等。这类设备的主要部件有转子、轴承系统、定子和机组壳体、联轴器等组成,转速从每分钟几十到几万、几十万转。 故障是指机器的功能失效,即其动态性能劣化,不符合技术要求。例如,机器运行失稳,产生异常振动和噪声,工作转速、输出功率发生变化,以及介质的温度、压力、流量异常等。机器发生故障的原因不同,所反映出的信息也不一样,根据这些特有的信息,可以对故障进行诊断。但是,机器发生故障的原因往往不是单一的因素,一般都是多种因素共同作用的结果,所以对设备进行故障诊断时,必须进行全面的综合分析研究。 由于旋转机械的结构及零部件设计加工、安装调试、维护检修等方面的原因和运行操作方面的失误,使得机器在运行过程中会引起振动,其振动类型可分为径向振动、轴向振动和扭转振动三类,其中过大的径向振动往往是造成机器损坏的主要原因,也是状态监测的主要参数和进行故障诊断的主要依据。 从仿生学的角度来看,诊断设备的故障类似于确定人的病因:医生需要向患者询问病情、病史、切脉(听诊)以及量体温、验血相、测心电图等,根据获得的多种数据,进行综合分析才能得出诊断结果,提出治疗方案。同样,对旋转机械的故障诊断,也应在获取机器的稳态数据、瞬态数据以及过程参数和运行状态等信息的基础上,通过信号分析和数据处理提取机器特有的故障症兆及故障敏感参数等,经过综合分析判断,才能确定故障原因,做出符合实际的诊断结论,提出治理措施。 根据故障原因和造成故障原因的不同阶段,可以将旋转机械的故障原因分为几个方面,见表1。 表1 旋转机械故障原因分类 基于DSP的图像处理系统的应用研究 摘要 本文介绍了一种基于FPGA+DSP结构的具有通用性、可扩充性的高速数字图像处理系统硬件平台。重点介绍了以高速数字信号处理器TMS320DM642和可编程逻辑器件XC2S300E为核心的图象处理系统的硬件实现方案以及通过DSP对FPGA芯片的动态配置来实现软件控制的设计思路。 关键词:可编程逻辑器件;数宇信号处理器;数字图象处理;动态配置 Abstract This paper presents the hardware platform of a high speed digital image processing system.The hardware design is based on the TMS320DM642 of Texas Instruments Corporation and XC2S300E of Xilinx corporation.The FPGA dynamic configuration is also introduced. Key words:DSP;FPGA;digital image processor;dynamic configuration 1、引言 随着科学技术的快速发展,人们对信息的需求越来越大,对信息的处理速度也越来越快。实时数字图象处理系统要求必须具有处理大数据量的能力,以保证系统的实时陛,其次对系统的体积、功耗、稳定性等也有较严格的要求,而数字图象处理处理理论与技术的飞速发展直接导致A/D、D/A、FPGA及DSP等电子集成产品的高速发展与更新,从而使许多复杂、高速的信号处理运算的实现成为可能。 目前,数字图象处理技术已在通信、信息,电子、自动控制、航天及军事等领域中得到广泛应用。软件技术突破了以功能单一、可扩充性差的硬件为核心的设计局限性,强调以开放性,扩充性和软件编程硬件为通用平台,利用系统可升级、可重复配置来实现多功能的设计。动态配置技术为同一硬件平台上实现不同的功能需求、不同的工作模式提供了可能。 本文介绍一种高速数字图象信号处理平台的实现方案,通过FPGA和DSP芯片来构造一个具有通用性、可扩充性、灵活的多功能高速数字信号处理平台。该平台通过动态配置可以进行多模式工作,能够应用在无线接收、卫星接收、图象处理和信号分析等多个领域。 2、信号处理系统的类型和本设计处理机构架 根据数字图象信号处理系统在构成、处理能力以及计算问题到硬件结构映射 旋转机械振动故障诊断的图形识别方法研究 集团公司文件内部编码:(TTT-UUTT-MMYB-URTTY-ITTLTY- 旋转机械振动故障诊断的图形识别方法研究我国近年来的旋转机械逐渐发展为大型机械,在这种发展趋势下人们开始重视对振动故障的诊断方法进行研究,在深入研究后探索出了一系列用人工识别图像来实现旋转机械振动故障诊断的方法。本文主要分析了旋转机械振动故障的机理、故障的特点以及几种图形识别方法。经过多种试验证明图形识别方法的科学可行性,值得在今后的实际操作中得到运用和发展。 对于旋转机械在工作状态当中会发生振动,从而由振动产生的各种信号,信号会形成一些参数图形,通过对这些参数图形的研究与分析,我们可以实现对器械运行过程中的日常管理和保护。这也是目前应该采用的设备管理方式。而在实际操作过程中,图形识别技术并没有深入到工作当中。这种手段没有被利用于诊断旋转机械故障的原因是提取出明显的图形特征在技术上具有一定的困难,而且对于图形具体特征的描述也具有很大的挑战,是否能够将图形所呈现出的特征准确地表述出来是图形识别技术在旋转机械振动故障诊断方面的一个限制性因素。诊断旋转机械振动故障的原则 采集诊断依据 被诊断的机械表面所能表现出的所有相关信息都能够作为旋转振动机械故障诊断的有效依据。这些信息在机械运行的过程中能够通过传感器传递给人们。对旋转机械振动故障的诊断是否准确,一个重要的因素就是收集到的有关信息是否真实可靠,依据信息是否准确真实的决定性因素是传感器的品质,传感器质量如何、感应是否灵敏以及工作人员的直观判断都是决定信息准确性的重要衡量标准。 对采集的信息进行处理和研究 从传感器和工作人员两方面收集到的依据信息通常是混乱无序的,不能明显的看出其特点,这就导致了无法准确地对故障进行判断,这就要求我们在成功收集信息之后要及时对大量信息进行筛选和处理,目前普遍采用专业的机器来对这些信息进行分析和研究以及进一步的转换,经过这些处理之后所得到的信息要保证具有至关、价值性强等特点。 对故障进行诊断 对旋转机械振动故障诊断方面对工作人员的要求比较高,要求其具有过硬的理论知识功底以及丰富的实际工作经验。工作人员应该充分了解机械方面的相关知识,熟练掌握机械的维修要点以及安装过程。正确的对机械振动故障进行诊断,并且能够对故障的发展形势进行预想,只有这 物联网技术在生态环境中的应用 我国于1970年开始着手环境监测工作,受经济、技术、人力等 方面的影响,我国生态环境监测工作尚不完善,再加上时间、天气、 距离等因素的影响,我国生态环境监测的结果及效率皆不尽人意。随 着科学技术的发展,物联网技术逐渐兴起,在进行深入研究与分析之后,我国正式将物联网技术引入生态环境监测当中,并发文增强物联 网技术的发展与应用。 1物联网技术 1.1物联网的基本概念物联网,简称IOT,是一种基于互联网并 将信息交流范围朝物与物之间联系的方向进行扩展和延伸而产生的一 种新型的信息技术。物联网的定义源于1999年的麻省理工学院的专家们,其将物联网定义为按照相关协议,利用各种信息传感设备如射频 识别、红外感应器等,连接互联网与物体,并通过对信息进行交换和 通信的方式,从而实现物体识别、定位、跟踪、监控及管理等方面智 能化和网络化的一种新型网络技术1。总体而言,物联网就是利用传感器,通过连接互联网和物体,从而实现物体的智能化管理。物联网技 术的使用将人类的生产和生活与互联网相互连接,再对资源进行充分 利用,提升社会劳动生产率的基础上实现了人类生产、生活的智能化、网络化。 1.2物联网的架构物联网的架构有三层,包括感知层、网络层和 应用层。感知层主要是指物联网系统的传感设备,如RFID标签、GPS、传感器、摄像头等。感知层就像是人类的皮肤和感官,用于与外界事 物进行接触并感知外界事物,感知层主要是用于识别并采集物体的各 类信息。网络层主要是指物联网系统的通信信号和网络中心,如网络 管理中心、监控中心、信息处理中心等。网络层就像是人类的神经中 枢和大脑,将所收集的信息传输至监控中心并进行处理。应用层主要 是指物联网系统的应用范围和方向。应用层就像是人类社的行业分工。现物联网技术已广泛应用于各行各业,根据行业物点,不同领域在利 用物联网技术的基础上建立了具行业特色的物联网系统,物联网技术 的使用有效实现了行业发展的智能化和网络化。 2物联网技术在生态环境监测中的应用 2.1大气监测物联网技术应用于大气监测主要是对大气进行流动 监测和固定在线监测两种方法。流动监测不但可实现监测功能,同时 还可具预报功能。流动监测是未来我国物联网技术应用于大气监测的 主要方式。固定监测是指通过在排污口安装监测设备,同时在监测范 围内以网格的形式安装传感器的方式对大气进行监测的一种方法。一 旦监测范围内的大气发生了变化,相关工作人员通过网络迅速接收到 传感器所感知到的信息并对其进行分析,加快了问题解决的速度,同 时还提升了决策的科学性,为制定预防计划提供了信息依据。据了解,现我国已有多个城市建立起了完善的空气智能监测系统,以对空气常 规指标进行实时监测,如武汉市。据统计,武汉市现已拥有8个监测 XXX 旋转机械远程在线监测和故障分析系统 技术方案书 代理商:重庆伯辰机电设备有限公司 联系地址:重庆市高新区奥体路1号附11-2-17-8号 联系电话: 目录 1系统构成 (2) 1.1 系统概述 (2) 1.2 系统构成 (2) 1.3 系统测点数量汇总 (2) 1.4 系统信号来源 (3) 2技术性能指标 (4) 2.1 中心服务器WEB8000 (4) 2.2 现场监测站NET8000 (4) 2.3 浏览站 (6) 2.4 S8000分析图谱及组件 (6) 2.5 状态监测系统的通信 (7) 2.6 网络安全 (7) 3供货清单 (7) 4工程实施与售后服务 (8) 4.1 甲乙方工作界面 (8) 4.2 工程时间 (9) 4.3 验收与质保 (9) 4.4 培训 (10) 4.5 售后服务 (10) 5附件:分析图谱及组件 (12) 5.1 常规图谱分析功能 (12) 5.2 启停机图谱分析功能 (14) 5.3 列表日记功能 (15) 5.4 诊断助手分析功能 (15) 5.5 数据传输功能 (17) 1系统构成 1.1系统概述 甲方:XX 乙方:XX 本技术协议书是XX公司(以下简称乙方)根据XX公司(以下简称甲方)对其机组提出的在线状态监测和分析系统(以下简称状态监测系统)相关的技术要求,提出了以旋转机械状态监测系统(S8000)及配套附件为基础的完整解决方案和完整系统构成,并对该方案的系统软、硬件配置、技术性能和工程服务等进行了详细说明,要求接入公司大型旋转机械在线监测中心。 乙方对提供的所有硬件、软件、技术服务和整套系统的安全、稳定运行负有完全责任。 S8000 旋转机械状态监测系统是乙方在2006年推出的新一代在线监测系统,速度更快、图谱更专业:采用全新的设计理念,监测分站采用Linux操作系统构建,底层采用PC104 总线结构,大大提高了系统的可靠性和采样速率;系统采用Java语言编写人机界面,设备管理和诊断人员,可通过IE浏览器查看更多更专业的分析诊断图谱。 1.2系统构成 系统由旋转机械状态监测系统、和辅助设备组成: 1.旋转机械状态监测系统(S8000 ): 含NET8000 现场监测站3台,WEB8000中心服务器1台,DELL现场浏览站; 2.系统附件(见供货清单); 3.伴随系统的技术工程服务、售后服务和质量保证。 1.3系统测点数量汇总 本状态监测系统涵盖机组。1套S8000系统共监测的: 轴振动测点共72点; 轴位移测点共12 点; 轴系键相测点共12点; 轴系监测仪表型号:待定 按照现场运行的监测要求,S8000系统监测通道数量如下表: 设备状态实时监控点检管理系统 摘要:随着我国制造行业的迅猛发展,企业设备维修制度不断改革和深化,传统的点检手段难以适应其要求,迫切需要全新的智能点检管理系统,以满足制造行业的发展需求。本文从点检的设计及实现方面来介绍设备点检系统。 当前制造业的设备管理维护面临着的主要问题: ?对设备的运行状态掌握不够; ?对设备有欠维护和过剩维护现象; ?设备信息获取时效性差; ?对设备故障的维修决策缺乏科学性和有效性; ?过多依赖人员素质,随意性强; ?缺乏对设备维护与管理工作的全面有效评估。 针对以上这些现实问题,太友科技研发了一套智能的设备点检管理系统,用户可根据生产和设备的管理要求编制计划、发布计划、采集数据、分析和处理数据。系统可对记录巡检数据的时间、地点、巡检员等相关信息。管理人员可根据生产现场的实际情况并通过系统软件自由的编制巡检计划,计划编制完成后管理人员可将计划发送至巡检仪。巡检人员按照巡检仪上接收到的计划要求,在规定的时间去执行规定的任务 (可以通过输入记录信息,也可以通过测温传感器、测振传感器测量和采集温度和振动信息),完成任务后巡检人员将已存储在巡检仪的数据上传到客户PC端中。管理人员就可以即时获得数据,并可通过系统提供的多种分析处理功能,对数据进行分析处理。 ?点检计划的制定:客户可直接在PC端设置好点检的项目、点检周期、点检单元等内容; ?点检计划下载:客户可通过巡检仪上的下载功能直接把已经在PC端设置好的巡检计划下载至巡检仪中; ?现场数据的采集:由内嵌在巡检仪上的数据采集软件实现对点检数据的自动采集,无需人工纸质记录点检结果,可采集的数据分为以下四类:观察类数据、测量类数据、记录类数据、设备运行状态记录; ?点检数据上传:通过内嵌在巡检仪上的同步功能,可直接将生产现场的设备点检数据同步至客户的PC端。在系统管理软件的支持下,将对这些来源于设备现场的原始数据进行各种评估和处理,从而实现了点检作业信息的计算机管理。 ?点检结果查询及报表分析:设备点检结果上传完后,客户可直接通过WEB管理端对点检结果进行查询,并且系统的报表分析功能,实现对巡检数据进行综合分析,及时了解各检查点的点检评分走势,为管理改善提供丰富的数据报表支持; 《图形的翻转与旋转》 授课对象:小学四年级 教材分析:本课内容为《变幻莫测的密室》一课中的内容。根据教材内容和小学生实际身心特点,我对该教材的相应内容进行了调整,突出设计了《图形的翻转与旋转》的教学内容,增强学生对图像变化的感知能力。 教学对象分析:通过前一阶段学习和操作,学生已经基本掌握了电脑绘图程序有关画图工具的操作方法,并能够根据要求完成一些简单的绘图制作。小学四年级的学生,年龄小、爱问好动、想像力丰富,对实际操作活动有着浓厚的兴趣,因此,在学习过程中,应鼓励学生自己观察,亲自动手操作,学会合作和交流,师生共同归纳总结、体验学习。 教学目标: 1、知识目标:教学生掌握电脑画图程序中翻转、旋转的菜单的使用,掌握改变图形方向的操作技巧。 2、技能目标:注重培养学生对图像方向变化的感知能力。 3、情感目标:鼓励学生敢于想象、大胆创新,提高学生对信息技术的学习兴趣,使学生获得成功的体验。 教学重点:学会用翻转和旋转的方法变化图形方向。 教学难点:结合学习和生活实际,利用翻转和旋转的方法进行有目的地变化图形方向。 教学方法:任务驱动模式 教学准备:多媒体计算机教学网络系统。 教学过程: 一、创设情景,激发兴趣 师:出示图片。小熊花花有一件高兴的事情,想告诉熊妈妈,可是它现在背对着妈妈,这样直接说话好吗? 生:不好。 师:大家说得对,这样做太没有礼貌了,小熊也知道错了,但怎样才能转过身来?像这样改变图形方向等问题还有很多,学了第十课你就会解决了。板书。《神奇的图形》 二、信息处理 1、自学“水平翻转” 师:我们怎样才能帮小熊解决这个问题?下面先来看看小助手给了我们什么启示?(出示屏录文件) 数字图像处理在DSP上的实现(旋转) 1 绪论 1.1设计目的 图像旋转是一种应用广泛的数字图像处理技术,随着应用水平的不断提高,对在嵌入式系统中实现高分辨率大图像旋转的需求也越来越高。如在航空领域的高分辨率数字地图图像的显示处理过程中,由于现有的显示芯片均不能支持图像旋转功能,就需要在资源有限的嵌入式平台上实现大幅面地图图像的实时旋转。采用DSP平台是一种实现方式,具体实现时需仔细考虑两个方面的问题,一是选用计算量小的旋转算法,二是充分发挥DSP平台强大的并行计算能力。 1.2设计任务 1.能从计算机上读取图片。 2.编写图像旋转程序,在TMS320C5509上实现。 2 设计原理及分析 2.1设计原理 目前,已经有很多有效降低计算量的图像旋转算法,基于图像线性存储结构的旋转方法就是其中之一。然而,在DSP平台上,有限的高速存储资源限制了这些算法效率的直接发挥,需要针对算法及DSP平台的性能结构特点进行高效的数据调度。对于图像旋转问题而言,数据调度还需要克服由于存在大量非连续图像像素地址访问而严重影响DSP数据存取及CPU效率发挥的问题。这是图像旋转本身的特殊性,在其他图像处理技术中是不存在的。 由DSP的结构特点可知,只有在数据和程序均位于片内存储器当中的条件下,DSP 的效率才能得到最大化的发挥。在大图像旋转算法中,由于涉及的图像数据量远大于DSP 的片内存储器容量,源图像和最终视口图像等数据必须被存放在片外存储器中。在这种情况下,为了保证DSP CPU高速处理能力的发挥,必须优化数据流,将源图像分块,依次搬移至片内处理,并设法保证CPU当前要处理的图像数据块已经事先在片内存储器中准备好了。因此在算法整体优化结构上采用Ping-Pong双缓冲技术,利用EDMA与CPU 并行工作来隐藏图像数据块在片内和片外之间的传输时间,使CPU能连续不断地处理数据,中间不会出现空闲等待。 传统的图像旋转一般通过矩阵乘法实现: 其中,α为旋转角度。 由于图像是线性存储的,各个像素点之间的相对位置关系确定。如图1(a)所示,图像旋转前,任意像素点P(x,y)和P1(x1,y1)、P2(x2,y2)及A(xA,yA)在几何上是矩形的四顶点关系。由于旋转变换是线性变换,如图1(b)所示,图像旋转后,各个像素点之间的相对位置关系不发生变化, 旋转算法的数据调度目的是使算法能够按照一定的规则,将源图像数据有规律地分块,并按次序分别传输到DSP片内存储器中,完成计算后,形成视口图像块,再将视口 大型旋转机械状态检测与故障诊断讲义 沈立智 阿尔斯通创为实技术发展(深圳)有限公司 2006年12月 目录 第一节状态监测与故障诊断的基本知识 (4) 一、状态监测与故障诊断的意义 (4) 二、大机组状态监测与故障诊断常用的方法 (4) 1. 振动分析法 (4) 2. 油液分析法 (5) 3. 轴位移的监测 (5) 4. 轴承回油温度及瓦块温度的监测 (5) 5. 综合分析法 (6) 三、有关振动的常用术语 (6) 1. 机械振动 (6) 2. 涡动、进动、正进动、反进动 (6) 3. 振幅 (7) 3.1 振幅 (7) 3.2 峰峰值、单峰值、有效值 (7) 3.3 振动位移、振动速度、振动加速度 (7) 3.4 振动烈度、振动标准 (8) 4. 频率 (9) 4.1 频率、周期 (9) 4.2 倍频、一倍频、二倍频、0.5倍频、工频、基频、半频 (9) 4.3 通频振动、选频振动 (10) 4.4 故障特征频率 (10) 5. 相位 (12) 5.1 相位、相位差 (12) 5.2 键相器 (13) 5.3 绝对相位 (13) 5.4 同相振动、反相振动 (14) 5.5 相位的应用 (14) 6. 相对轴振动、绝对轴振动、轴承座振动 (16) 7. 横向振动、轴向振动、扭转振动 (16) 8. 刚性转子、挠性转子、圆柱形振动、圆锥形振动、弓状回转 (17) 9. 刚度、阻尼、临界阻尼 (17) 10. 临界转速 (18) 11. 挠度、弹性线、主振型、轴振型 (18) 12. 高点、重点 (19) 13. 机械偏差、电气偏差、晃度 (20) 14. 谐波、次谐波 (20) 15. 同步振动、异步振动、亚异步振动、超异步振动 (20) 16. 共振、高次谐波共振、次谐波共振 (21) 17. 简谐振动、周期振动、准周期振动、瞬态振动、冲击振动、随机振动 (21) 18. 自由振动、受迫振动、自激振动、参变振动 (22) 19. 旋转失速、喘振 (23) 20. 半速涡动、油膜振荡 (24) 2.1系统功能介绍 一个实际的应用系统中,总存在各种干扰。数字滤波器在语音信号处理、信号频谱估计、信号去噪、无线通信中的数字变频以及图像信号等各种信号处理中都有广泛的应用,数字滤波器也是使用最为广泛的信号处理算法之一。 在本设计中,使用MATLAB模拟产生合成信号,然后利用CCS进行滤波。设定模拟信号的采样频率为48000Hz,。设计一个FIR低通滤波器,其参数为:滤波器名称:FIR低通滤波器 采样频率:Fs=48000Hz 通带截止频率:15000Hz 阻带截止频率:16000Hz 通带最大衰减:0.1dB 阻带最少衰减:80dB 滤波器系数:由MATLAB根据前述参数求得。 2.2 总体设计方案流程图 图1 总体设计方案 主要内容和步骤 3.1 滤波器原理 对于一个FIR 滤波器系统,它的冲击响应总是又限长的,其系统函数可记为: ()()10 N n n H z h n z --==∑ 其中1N -是FIR 的滤波器的阶数,n z -为延时结,()h n 为端口信号函数。 最基本的FIR 滤波器可用下式表示: ()()()10 N k y n h k x n k -==-∑ 其中()x n k -输入采样序列,()h k 是滤波器系数,N 是滤波器的阶数()Y n 表示滤波器的输出序列,也可以用卷积来表示输出序列()y n 与()x n 、()h n 的关系,如下: ()()()y n x n h n =* 3.2 操作步骤 (1)打开FDATOOL ,根据滤波要求设置滤波器类型、通带截止频率、指定阶数、采样频率等。指定完设计参数后单击按钮Design Filter ,生成滤波器系数。 (2)把生成的滤波器系数传到目标DSP 。选择菜单Targets->Export to Code Composer Studio(tm)IDE ,打开Export to C Header File 对话框,选择C header file ,指定变量名(滤波器阶数和系数向量),输出数据类型可选浮点型或32 b ,16 b 整型等,根据自己安装选择目标板板号和处理器号,单击OK ,保存该头文件,需指定文件名(filtercoeff .h)和路径(保存在c :\ti\myprojects\fir 工程中)。 (3)修改CCS 汇编程序,删掉数据前的所有文字,在开头加上.data ,第二行加coeff .word ,在每行的前面加上.word ,比且把每行的最后的逗号去掉。 (4)编译汇编程序,如果有错误,按错误进行修改;没错误,则往下执行。 (5)加载初始化DATA 数据。运行程序,查看输入输出波形,修改相应参数进行调试旋转机械振动的基本特性
基于DSP的图像处理系统的应用研究论文
旋转机械振动故障诊断的图形识别方法研究
物联网技术在生态环境中的应用
大型旋转机械远程在线监测
设备状态实时监控点检管理系统
图形的翻转与旋转
数字图像处理在DSP上的实现
大型旋转机械状态检测与故障诊断讲义
(完整版)基于DSP的数字滤波器的设计与仿真
相关主题
文本预览